JP2004158689A - 走査型露光方法及び走査型露光装置 - Google Patents
走査型露光方法及び走査型露光装置 Download PDFInfo
- Publication number
- JP2004158689A JP2004158689A JP2002323881A JP2002323881A JP2004158689A JP 2004158689 A JP2004158689 A JP 2004158689A JP 2002323881 A JP2002323881 A JP 2002323881A JP 2002323881 A JP2002323881 A JP 2002323881A JP 2004158689 A JP2004158689 A JP 2004158689A
- Authority
- JP
- Japan
- Prior art keywords
- scanning
- substrate
- wafer
- reticle
- exposure method
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images








Landscapes
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Abstract
【課題】基板の移動に無駄な時間を生じさせず、スループットの向上に寄与する。
【解決手段】露光光の照明領域Aに対して基板を第1方向Yに走査移動させることによって基板上の1つの区画領域S1〜S3を露光する走査ステップと、基板を第1方向Yと交差する第2方向Xへ移動させる移動ステップとを交互に繰り返し行うことによって、基板上の複数の区画領域S1〜S3を露光する。走査ステップ中に、第1方向Yに対して第2方向X成分を含む斜め方向に基板を駆動する。
【選択図】 図3
【解決手段】露光光の照明領域Aに対して基板を第1方向Yに走査移動させることによって基板上の1つの区画領域S1〜S3を露光する走査ステップと、基板を第1方向Yと交差する第2方向Xへ移動させる移動ステップとを交互に繰り返し行うことによって、基板上の複数の区画領域S1〜S3を露光する。走査ステップ中に、第1方向Yに対して第2方向X成分を含む斜め方向に基板を駆動する。
【選択図】 図3
Description
【0001】
【発明の属する技術分野】
本発明は、例えば半導体素子、液晶表示素子、撮像素子(CCD等)、又は薄膜磁気ヘッド等を製造するためのフォトリソグラフィ工程でマスク上のパターンを感光性の基板上に露光するために使用される走査型露光方法および走査型露光装置に関し、特に基板上の複数の区画領域に順次パターンを露光する走査型露光方法および走査型露光装置に適用して好適なものである。
【0002】
【従来の技術】
従来、半導体素子等を製造するためのフォトリソグラフィ工程では、マスクとしてのレチクル上にほぼ正方形状の照明領域を設定し、該照明領域内のパターンを投影光学系を介して感光性基板としてのウエハ(又はガラスプレート等)上に露光するステッパー等の一括露光方式の投影露光装置が多用されていた。これに対して最近は、半導体素子等のチップパターンの大型化に対応するために、より大きなレチクルのパターンをウエハ上の各ショット領域に転写することが求められている。ところが、広い露光フィールドの全面でディストーションや像面湾曲等の収差を所定の許容値以下に抑制した投影光学系の設計及び製造は困難である。
【0003】
そのため、最近ではレチクル上に長方形又は円弧状等のスリット状の照明領域を設定し、該照明領域内のパターンを投影光学系を介してウエハ上に投影した状態で、レチクルとウエハとを投影光学系に対して同期走査しながらレチクルのパターンをウエハ上の各ショット領域に逐次露光する走査ステップと、走査方向と略直交する方向にウエハをステップ移動させる移動ステップとを交互に繰り返すステップ・アンド・スキャン方式等の走査露光型の投影露光装置が注目されている(特許文献1参照)。
【0004】
この走査露光型の投影露光装置は投影光学系の有効露光フィールドにほぼ内接するスリット状の露光領域に対してウエハを走査しながら露光するため、投影光学系の有効露光フィールドの直径を最大限に利用できる他、走査方向への転写パターンの長さはその有効露光フィールドの直径よりも長くできるため、結果として大面積のレチクルのパターンを小さい収差でウエハ上に転写できる。
【0005】
図11は、ウエハ(基板)W(及び不図示のレチクル)を露光光の矩形照明領域Aに対して相対移動させて、ウエハW上の複数のショット領域(区画領域)S1〜S3を露光する際の相対移動経路の例を簡略的に示す図である。この図に示すショット領域S1〜S3は、一回の走査ステップでレチクルのパターンがそれぞれ転写される領域が走査方向(スキャン方向)であるY方向に1つ、ステップ移動方向(非スキャン方向)であるX方向に3つ、互いに区画されて配置されたものである。なお、実際には、位置が固定された照明領域Aに対してウエハW(ショット領域)が移動するが、ここでは便宜上照明領域Aがショット領域S1〜S3に対して移動するものとして説明する。
【0006】
この場合、X方向に延在する照明領域Aは、+Y方向に相対移動することでショット領域S1を露光した後に+X方向にステップ移動する。続いて、走査方向を−Y方向に反転してショット領域S2を露光する。このように、Y方向への走査移動と、これと直交するX方向へのステップ移動とを繰り返すことにより、ウエハW上のショット領域S1〜S3を連続的に露光することが可能である。
【0007】
【特許文献1】
特開平4−196513号公報
【0008】
【発明が解決しようとする課題】
しかしながら、上述したような従来の走査型露光方法及び走査型露光装置には、以下のような問題が存在する。
露光処理に要する時間を短縮するためには、X方向へのステップ移動を走査ステップの終了と同時に行うことで実現できる。ところがX方向へのステップ移動量が多い場合には、走査方向に関して、移動方向を反転して次の露光開始位置に到達するまでに(例えば、ショット領域S1への露光が終了してショット領域S2の露光開始位置に到達するまでに)、X方向へのステップ移動が完了しない場合がある。このような場合は、X方向へのステップ移動が完了するのを待ってY方向の走査移動を行う必要があり、時間の無駄が生じてしまいスループットが低下するという問題があった。
【0009】
本発明は、以上のような点を考慮してなされたもので、基板の移動に無駄な時間を生じさせず、スループットの向上に寄与できる走査型露光方法及び走査型露光装置を提供することを目的とする。
【0010】
【課題を解決するための手段】
上記の目的を達成するために本発明は、実施の形態を示す図1ないし図9に対応付けした以下の構成を採用している。
本発明の走査型露光方法は、露光光の照明領域(A)に対して基板(W)を第1方向(Y方向)に走査移動させることによって基板(W)上の1つの区画領域(S1〜S3)を露光する走査ステップと、基板(W)を第1方向(Y方向)と交差する第2方向(X方向)へ移動させる移動ステップとを交互に繰り返し行うことによって、基板(W)上の複数の区画領域を露光する走査型露光方法であって、走査ステップ中に、第1方向(Y方向)に対して第2方向(X方向)成分を含む斜め方向に基板(W)を駆動することを特徴とするものである。
【0011】
また、本発明の走査型露光装置は、露光光の照明領域(A)に対して基板(W)を第1方向(Y方向)に走査移動させるとともに、走査移動の間に、基板(W)を第2方向(X方向)へ移動させる駆動装置(74)を有する走査型露光装置(10)であって、走査移動中に、第1方向(Y方向)に対して第2方向(X方向)成分を含む斜め方向に基板(W)を駆動するように駆動装置(74)を制御する制御装置(50)を備えたことを特徴とするものである。
【0012】
従って、本発明の走査型露光方法及び走査型露光装置では、走査ステップで第2方向(X方向)にも基板(W)が移動しているため、移動ステップで必要な第2方向(X方向)への移動量は、走査ステップで移動した量減少することになる。そのため、走査ステップのために移動ステップが完了するまで待つ時間を減少させることができるか、もしくは移動ステップが完了するまで待つ必要がなくなり、時間の無駄を減少させることが可能になり、スループットの向上が期待できる。
【0013】
【発明の実施の形態】
以下、本発明の走査型露光方法及び走査型露光装置の第1の実施形態を、図1ないし図4を参照して説明する。ここでは、例えば露光装置として、レチクルとウエハとを同期移動しつつ、レチクルに形成された半導体デバイスの回路パターンをウエハ上に転写する、スキャニング・ステッパ(走査型露光装置)を使用する場合の例を用いて説明する。これらの図において、従来例として示した図11と同一の構成要素には同一符号を付し、その説明を省略する。
【0014】
図1には、本発明に係る走査型露光装置10の全体構成が概略的に示されている。この露光装置10は、マスクとしてのレチクルRと、基板としてのウエハWとを一次元方向(ここでは、図1における紙面内左右方向であるY軸方向とする)に同期移動しつつ、レチクルRに形成された回路パターンを投影光学系PLを介してウエハW上の各ショット領域に転写する、ステップ・アンド・スキャン方式の走査型露光装置、いわゆるスキャニング・ステッパである。
【0015】
図1に示す露光装置10は、光源12からの露光用照明光によりレチクル(マスク)R上の矩形状(あるいは円弧状)の照明領域を均一な照度で照明する照明光学系IOP、レチクルRを保持して移動するレチクルステージ(マスクステージ)RST、レチクルRから射出される照明光(パルス紫外光)をウエハ(基板)W上に投影する投影光学系PL、ウエハWを保持して移動するウエハステージ(基板ステージ)WSTを備えている。さらに、露光装置10は、前記照明光学系IOPの一部,レチクルステージRST,投影光学系PL,及びウエハステージWST等を保持する本体コラム14、本体コラム14の振動を抑制あるいは除去する防振ユニット、及びこれらの制御系等を備えている。なお、ここで投影光学系PLの光軸方向をZ方向とし、このZ方向と直交する方向でレチクルRとウエハWの同期移動方向をY方向とし、非同期移動方向をX方向とする。また、それぞれの軸周りの回転方向をθZ、θY、θXとする。
【0016】
光源12としては、ここでは波長192〜194nmの間で酸素の吸収帯を避けるように狭帯化されたパルス紫外光を出力するArFエキシマレーザ光源が用いられており、この光源12の本体は、半導体製造工場のクリーンルーム内の床面FD上に設置されている。光源12には、不図示の光源制御装置が併設されており、この光源制御装置では、射出されるパルス紫外光の発振中心波長及びスペクトル半値幅の制御、パルス発振のトリガ制御、レーザチャンバ内のガスの制御等を行うようになっている。
【0017】
なお、光源12として、波長248nmのパルス紫外光を出力するKrFエキシマレーザ光源あるいは波長157nmのパルス紫外光を出力するF2レーザ光源等用いても良い。また、光源12をクリーンルームよりクリーン度が低い別の部屋(サービスルーム)、あるいはクリーンルームの床下に設けられるユーティリティスペースに設置しても構わない。
【0018】
光源12は、図1では作図の都合上その図示が省略されているが、実際には遮光性のベローズ及びパイプを介してビームマッチングユニットBMUの一端(入射端)に接続されており、このビームマッチングユニットBMUの他端(出射端)は、内部にリレー光学系を内蔵したパイプ16を介して照明光学系IOPの第1照明光学系IOP1に接続されている。ビームマッチングユニットBMU内には、リレー光学系や複数の可動反射鏡等(いずれも不図示)が設けられており、これらの可動反射鏡等を用いて光源12から入射する狭帯化されたパルス紫外光(ArFエキシマレーザ光)の光路を第1照明光学系IOP1との間で位置的にマッチングさせている。
【0019】
照明光学系IOPは、第1照明光学系IOP1と第2照明光学系IOP2との2部分から構成されている。第1照明光学系IOP1は、床面FDに水平に載置された装置の基準となるフレームキャスタと呼ばれるベースプレートBP上に設置されている。また、第2照明光学系IOP2は、本体コラム14を構成する後述する第2の支持コラム52によって下方から支持されている。
【0020】
第1照明光学系IOP1は、所定の位置関係で配置されたミラー、可変減光器、ビーム成形光学系、オプティカルインテグレータ、集光光学系、振動ミラー、照明系開口絞り板、ビームスプリッタ、リレーレンズ系、及びレチクルブラインド機構を構成する可動視野絞りとしての可動レチクルブラインド(照明領域設定装置)28J等を備えている。光源12からのパルス紫外光がビームマッチングユニットBMU及びリレー光学系を介して第1照明光学系IOP1内に水平に入射すると、このパルス紫外光は、可変減光器のNDフィルタにより所定のピーク強度に調整された後、ビーム整形光学系により、オプティカルインテグレータに効率よく入射するようにその断面形状が整形される。
【0021】
次いで、このパルス紫外光がオプティカルインテグレータに入射すると、射出端側に面光源、すなわち多数の光源像(点光源)から成る2次光源が形成される。これらの多数の点光源の各々から発散するパルス紫外光は、照明系開口絞り板上のいずれかの開口絞りを通過した後、露光光として可動レチクルブラインド28Jに到達する。
【0022】
可動レチクルブラインド28Jは、例えば2枚のL字型の可動ブレードと、この可動ブレードを駆動するアクチュエータ(いずれも不図示)とを有する。可動ブレードとしては、直線状に形成されたものがそれぞれ独立して移動自在に矩形配置されたものでもよい。これらの可動ブレードは、レチクルRの走査方向に対応する方向及び走査方向と直交する非走査方向に対応する方向の位置が可変となっている。この可動レチクルブラインド28Jは、不要な部分の露光を防止するため、走査露光の開始時及び終了時に可動ブレードにより、後述する固定レチクルブラインドによって規定されるレチクルR上の照明領域を更に制限するために用いられる。この可動レチクルブラインド28Jの駆動は、後述する主制御装置50によって制御される(図2参照)。
【0023】
第2照明光学系IOP2は、照明系ハウジング17内に所定の位置関係で収納された固定レチクルブラインド、レンズ、ミラー、リレーレンズ系、メインコンデンサレンズ等(いずれも不図示)を備えている。固定レチクルブラインドは、照明系ハウジング17の入射端近傍のレチクルRのパターン面に対する共役面から僅かにデフォーカスした面に配置され、レチクルR上の照明領域A(図3参照)を規定する所定形状の開口部が形成されている。この固定レチクルブラインドの開口部は、投影光学系PLの円形視野内の中央で走査露光時のレチクルRの移動方向(Y軸方向)と直交したX軸方向に直線的に伸びたスリット状又は矩形状に形成されているものとする。
【0024】
可動レチクルブラインド28Jのブレードの開口部を通過したパルス紫外光は、固定レチクルブラインドの開口部を一様な強度分布で照明する。固定レチクルブラインドの開口部を通ったパルス紫外光は、レンズ、ミラー、リレーレンズ系、主コンデンサレンズ系を経て、レチクルステージRST上に保持されたレチクルR上の所定の照明領域(X軸方向に直線的に伸びたスリット状又は矩形状の照明領域)Aを均一な照度分布で照明する。ここで、レチクルRに照射される矩形スリット状の照明光は、投影光学系PLの円形投影視野の中央にX軸方向(非走査方向)に細長く延びるように設定され、その照明光のY軸方向(走査方向)の幅はほぼ一定に設定されている。
【0025】
なお、第1照明光学系IOP1と第2照明光学系IOP2とを強固に接合すると、可動レチクルブラインド28Jの駆動に起因して露光動作中に第1照明光学系IOP1に生じる振動が第2のコラム52に支持された第2照明光学系IOP2にそのまま伝達されることとなって、好ましくない。このため、本実施形態では、第1照明光学系IOP1と第2照明光学系IOP2との間は、両者の相対変位を可能にし、かつその内部を外気に対して気密状態にすることが可能な接続部材としての伸縮自在の蛇腹状部材94を介して接合されている。
【0026】
図1に戻り、本体コラム14は、ベースプレートBP上に設けられた複数本(ここでは4本)の支持部材40A〜40D(但し、紙面奥側の支柱40C、40Dは図示省略)及びこれらの支持部材40A〜40Dの上部にそれぞれ固定された防振ユニット42A〜42D(但し、図1においては紙面奥側の防振ユニット42C、42Dは図示せず、図4参照)を介してほぼ水平に支持された鏡筒定盤44と、この鏡筒定盤44の下面から下方に吊り下げられた吊り下げコラム46と、鏡筒定盤44上に設けられた第1、第2の支持コラム48、52とを備えている。
【0027】
前記防振ユニット42A〜42Dは、支持部材40A〜40Dそれぞれの上部に直列(又は並列)に配置された内圧が調整可能なエアマウントとボイスコイルモータ(不図示)とを含んで構成されている。これらの防振ユニット42A〜42Dによって、ベースプレートBP及び支持部材40A〜40Dを介して鏡筒定盤44に伝わる床面FDからの微振動がマイクロGレベルで絶縁される構成になっている。
【0028】
前記鏡筒定盤44は鋳物等で構成されており、その中央部に平面視円形の開口が形成され、その内部に投影光学系PLがその光軸方向をZ軸方向として上方から挿入されている。投影光学系PLの鏡筒部の外周部には、該鏡筒部に一体化されたフランジFLGが設けられている。このフランジFLGの素材としては、低熱膨張の材質、例えばインバー(Inver;ニッケル36%、マンガン0.25%、及び微量の炭素と他の元素を含む鉄からなる低膨張の合金)が用いられており、このフランジFLGは、投影光学系PLを鏡筒定盤44に対して点と面とV溝とを介して3点で支持するいわゆるキネマティック支持マウントを構成している。このようなキネマティック支持構造を採用すると、投影光学系PLの鏡筒定盤44に対する組み付けが容易で、しかも組み付け後の鏡筒定盤44及び投影光学系PLの振動、温度変化、姿勢変化等に起因する応力を最も効果的に軽減できるという利点がある。
【0029】
前記吊り下げコラム46は、ウエハベース定盤54と、該ウエハベース定盤54をほぼ水平に吊り下げ支持する4本の吊り下げ部材56とを備えている。また、第1の支持コラム48は、鏡筒定盤44の上面に投影光学系PLを取り囲んで植設された4本の脚58(紙面奥側の脚は図示省略)と、これら4本の脚58によってほぼ水平に支持されたレチクルベース定盤60とを備えている。同様に、第2の支持コラム52は、鏡筒定盤44の上面に、第1の支持コラム48を取り囲む状態で植設された4本の支柱62(紙面奥側の支柱は図示省略)と、これら4本の支柱62によってほぼ水平に支持された天板64とによって構成されている。この第2の支持コラム52の天板64によって、前述した第2部分光学系IOP2が支持されている。
【0030】
また、本体コラム14を構成する鏡筒定盤44には、図1では図示が省略されているが、実際には、本体コラム14のZ方向の振動を計測する3つの振動センサ(例えば加速度計)とXY面内方向の振動を計測する加速度計などの3つの振動センサ(例えば、この内の2つの振動センサは、本体コラム14のY方向の振動を計測し、残りの振動センサは、本体コラム14のX方向の振動を計測する)とが取り付けられている。以下においては、便宜上、これら6つの振動センサを総称して振動センサ群66と呼ぶものとする。
【0031】
この振動センサ群66の計測値は、主制御装置50に供給されるようになっている(図2参照)。従って、主制御装置50では、振動センサ群66の計測値に基づいて本体コラム14の6自由度方向の振動を求めることができる。そして、主制御装置50では、例えばレチクルステージRST、ウエハステージWSTの移動時等には、振動センサ群66の計測値に基づいて求めた本体コラム14の6自由度方向の振動を除去すべく、防振ユニット42A〜42Dの速度制御を例えばフィードバック制御あるいはフィードバック制御及びフィードフォワード制御によって行い、本体コラム14の振動を効果的に抑制することが可能である。
【0032】
前記レチクルステージRSTは、本体コラム14を構成する第1の支持コラム48を構成するレチクルベース定盤60上に配置されている。レチクルステージRSTは、例えば磁気浮上型の2次元リニアアクチュエータ等から成るレチクルステージ駆動系68(図1では図示せず、図2参照)によって駆動され、レチクルRをレチクルベース定盤60上でY軸方向に大きなストロークで直線駆動するとともに、X軸方向とθz方向(Z軸回りの回転方向)に関しても微小駆動が可能な構成となっている。
【0033】
前記レチクルステージRSTの一部には、その位置や移動量を計測するための位置検出装置であるレチクルレーザ干渉計70からの測長ビームを反射する移動鏡72が取り付けられている。レチクルレーザ干渉計70は、レチクルベース定盤60に固定され、投影光学系PLの上端部側面に固定された固定鏡Mrを基準として、レチクルステージRST(すなわちレチクルR)のXY面内の位置(θz回転を含む)を例えば、0.5〜1nm程度の分解能で検出するようになっている。
【0034】
上記のレチクルレーザ干渉計70によって計測されるレチクルステージRST(即ちレチクルR)の位置情報(又は速度情報)は主制御装置50に送られる(図2参照)。主制御装置50は、基本的にはレチクルレーザ干渉計70から出力される位置情報(或いは速度情報)が指令値(目標位置、目標速度)と一致するようにレチクルステージ駆動系68を制御する。
【0035】
前記投影光学系PLとしては、ここでは、物体面(レチクルR)側と像面(ウエハW)側の両方がテレセントリックで円形の投影視野を有し、石英や螢石を光学硝材とした屈折光学素子(レンズ素子)のみから成る1/4、1/5、又は1/6縮小倍率の屈折光学系が使用されている。このため、レチクルRにパルス紫外光が照射されると、レチクルR上の回路パターン領域のうちのパルス紫外光によって照明された部分からの結像光束が投影光学系PLに入射し、その回路パターンの部分倒立像がパルス紫外光の各パルス照射の度に投影光学系PLの像面側の円形視野の中央にスリット状または矩形状(多角形)に制限されて結像される。これにより、投影された回路パターンの部分倒立像は、投影光学系PLの結像面に配置されたウエハW上の複数のショット領域のうちの1つのショット領域表面のレジスト層に縮小転写される。
【0036】
前記ウエハステージWSTは、前述した吊り下げコラム46を構成するウエハベース定盤54上に配置され、例えば磁気浮上型の2次元リニアアクチュエータ等から成るウエハステージ駆動系(駆動装置)74(図1では図示せず、図2参照)によってXY面内で自在に駆動されるようになっている。
【0037】
ウエハステージWSTの上面に、ウエハホルダ76を介してウエハWが真空吸着等によって固定されている。ウエハステージWSTのXY位置及び回転量(ヨーイング量、ローリング量、ピッチング量)は、投影光学系PLの鏡筒下端に固定された参照鏡Mwを基準としてウエハステージWSTの一部に固定された移動鏡78の位置変化を計測するウエハレーザ干渉計80によって所定の分解能、例えば0.5〜1nm程度の分解能でリアルタイムに計測される。このウエハレーザ干渉計80の計測値は、主制御装置50に供給されるようになっている(図2参照)。
【0038】
図2には、上述した露光装置10の制御系の構成が簡単に示されている。この制御系は、ワークステーション(又はマイクロコンピュータ)から成る主制御装置50を中心として構成されている。主制御装置50は、これまでに説明した各種の制御を行う他、装置全体を統括的に制御する。
【0039】
次に、上述のようにして構成された露光装置10における露光動作について説明する。
ウエハステージWST上にウエハWが搬送され、フォーカス調整が終了すると、不図示のアライメント系を用いてレチクルRとウエハWとを位置決め(アライメント)する。このようにして、ウエハWの露光のための準備動作が終了すると、主制御装置50では、アライメント結果に基づいてウエハレーザ干渉計80の計測値をモニタしつつウエハステージ駆動系74を制御してウエハWの第1ショットの露光のための走査開始位置にウエハステージWSTを移動する。
【0040】
そして、主制御装置50ではレチクルステージ駆動系68及びウエハステージ駆動系74を介してレチクルステージRSTとウエハステージWSTとのY方向の走査を開始し、両ステージRST、WSTがそれぞれの目標走査速度に達すると、パルス紫外光によってレチクルRのパターン領域が照明され始め、走査露光が開始される。なお、この走査露光の開始に先立って、光源12の発光は開始されているが、主制御装置50によってレチクルブラインド装置を構成する可動ブラインド28Jの各可動ブレードの移動がレチクルステージRSTの移動と同期制御されているため、レチクルR上のパターン領域外へのパルス紫外光の照射が遮光されることは、通常のスキャニング・ステッパと同様である。
【0041】
主制御装置50では、特に上記の走査露光時にレチクルステージRSTのY軸方向の移動速度VrとウエハステージWSTのY軸方向の移動速度Vwとが投影光学系PLの投影倍率(1/4倍、1/5倍あるいは1/6倍)に応じた速度比に維持されるようにレチクルステージ駆動系68及びウエハステージ駆動系74を介してレチクルステージRST及びウエハステージWSTを同期制御する。
【0042】
そして、レチクルRのパターン領域がパルス紫外光で逐次照明され、パターン領域全面に対する照明が完了することにより、ウエハW上の第1ショットの走査露光が終了する。これにより、レチクルRのパターンが投影光学系PLを介して第1ショットに縮小転写される。このようにして、第1ショットの走査露光が終了すると、主制御装置50によりウエハステージ駆動系74を介してウエハステージWSTがX軸方向にステップ移動され、第2ショットへの露光のため走査開始位置に移動される。このステッピングの際に、主制御装置50ではウエハステージWSTの位置(ウエハWの位置)を検出するウエハレーザ干渉計80の計測値に基づいてウエハステージWSTのX、Y、θz方向の位置変位をリアルタイムに計測する。この計測結果に基づき、主制御装置50ではウエハステージ駆動系74を制御してウエハステージWSTのXY位置変位が所定の状態になるようにウエハステージWSTの位置を制御する。
【0043】
また、主制御装置50ではウエハステージWSTのθz方向の変位の情報に基づいてレチクルステージ駆動系68を制御し、そのウエハW側の回転変位の誤差を補償するようにレチクルステージRSTを回転制御する。そして、主制御装置50では第2ショット領域に対して上記と同様の走査露光を行う。このようにして、ウエハW上のショットの走査露光(走査ステップ)と次ショット露光のためのステッピング動作(移動ステップ)とが繰り返し行われ、ウエハW上の露光対象ショット領域の全てにレチクルRのパターンが順次転写される。
【0044】
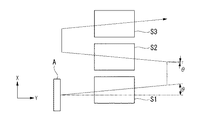
以下、図3を参照して、ウエハW上の複数のショット領域S1〜S3を露光する際に、照明領域Aと各ショット領域とを相対移動させる経路について説明する。なお、ここでも便宜上、照明領域Aがショット領域S1〜S3に対して移動するものとして説明する。また、レチクルステージRST(レチクルR)は、ウエハステージWST(ウエハW)の移動(X、Y、θz)に対して追従するため、ここでは主にウエハW上のショット領域S1〜S3と照明領域Aとの相対移動について言及する。
【0045】
照明領域Aは、ショット領域S1に対する走査露光を行うべく、移動を開始する。ここではY方向(第1方向)に対してX方向(第2方向)成分を含む斜め方向(Y方向に対して角度θの方向)に沿って照明領域Aを移動させる。
【0046】
このときのY方向及びX方向に関する照明領域Aの、時間と速度との関係を図4のタイムチャートに示す。このタイムチャートに示すように、X方向、Y方向の双方で、期間T1で走査時の速度(Vy、Vx)まで加速し、期間T2で等速移動する。この期間T2では、加速後の整定及びショット領域S1への走査露光が行われる。なお、照明領域Aが斜め方向に移動する場合は、ウエハW上の任意の点が照明領域Aを通過する時間が、Y方向に沿って移動する場合に比較して長くなるため、走査速度が同一の場合は、増加する走査時間に対応して走査開始前に予め照明光の光量を減じるステップを設けておくことが必要である。
【0047】
続いて、期間T2後の期間T3では、X方向の移動に関しては速度Vxでの等速移動を継続するが、Y方向の移動については走査方向を反転するために速度0まで一旦減速する。そして、Y方向の移動速度が0に達すると、照明領域Aは、期間T4ではY方向については移動を停止した状態で、X方向に関してショット領域S2の走査開始位置までステップ移動を行うために加減速を行う。このときのステップ移動距離は、走査ステップでX方向にも移動している分、短くなっている。
【0048】
照明領域Aは、ショット領域S2に対する走査開始位置に達すると、期間T5でY方向の移動については走査速度Vy(方向は逆)まで加速し、X方向については+X方向へ速度Vxで等速移動を行う。この後、期間T6以降で上記と同様に、照明領域AをY方向については速度Vy、X方向については速度Vxで、Y方向に対する角度θの斜め方向に移動させる走査ステップと、X方向にのみステップ移動させる移動ステップとを交互に繰り返し行うことによって、複数のショット領域S1〜S3を順次露光することができる。
【0049】
このように、本実施の形態では、走査ステップ中に照明領域AがX方向にも移動するので、走査ステップと移動ステップとが重複することになり、走査露光後のX方向の移動距離を短くすることが可能になり、次の走査ステップを開始するまでの時間の無駄を少なくすることができる。そのため、露光処理に係るスループットの低下を抑えることができ、生産性向上に寄与することが可能になる。また、本実施の形態では、走査開始前に予め照明光の光量を減じているので、照明領域Aが斜め方向に移動することによる光量過多を未然に防ぐことができ、高品質のデバイス製造が可能になる。
【0050】
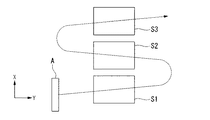
図5及び図6は、本発明の走査型露光方法及び走査型露光装置の第2の実施の形態を示す図である。これらの図において、図1乃至図4に示す第1の実施の形態の構成要素と同一の要素については同一符号を付し、その説明を省略する。第2の実施の形態と上記の第1の実施の形態とが異なる点は、照明領域Aの移動速度である。
【0051】
図5に示すように、本実施の形態では移動ステップにおける照明領域Aの移動は曲線の移動軌跡を描くように設定されている。すなわち、本実施の形態では、図6に示すように、照明領域Aは期間T2でのY方向及びX方向の等速移動が終了すると、Y方向に関して期間T3、T5で移動速度をVyからショット領域S2を走査露光する際の−Vyに変更して移動方向を反転するが、X方向に関しても、この期間T3、T5で移動速度をVxから加速するとともに、ショット領域S2を走査露光する際の速度Vxまで減速することで、X方向及びY方向に関する移動ステップが終了する。なお、X軸の速度曲線(図面には直線で示されているが、実際には曲線となる)は必ずしもY軸の速度ゼロ位置を中心とする左右対称な曲線である必要はない。
【0052】
換言すると、本実施の形態では、X方向への移動ステップが完了するのを待つことなくY方向への移動ステップを完了させて走査ステップを開始することができる。従って、本実施の形態では、次の走査ステップを開始するまでの無駄な時間(図4中、期間T4に相当)を削除することができ、露光処理に係るスループットを大幅に向上させることが可能になる。
【0053】
図7及び図8は、本発明の走査型露光方法及び走査型露光装置の第3の実施の形態を示す図である。これらの図において、図5及び図6に示す第2の実施の形態の構成要素と同一の要素については同一符号を付し、その説明を省略する。第3の実施の形態と上記の第2の実施形態とが異なる点は、照明領域Aが移動する際のウエハWの姿勢である。
【0054】
図7に示すように、照明領域AはY方向に対して角度θの斜め方向に走査移動するが、本実施の形態では、ショット領域S1の配列方向がこの走査方向に合致するように、走査時にウエハWを照明光の光軸周りに回転させている。すなわち、図8のタイムチャートに示すように、走査開始前にウエハステージWSTを介してウエハWの回転を開始し、Y方向及びX方向の走査速度までの加速期間T1で角度−θの回転を完了させる。そして、期間T2でショット領域S1への走査露光を行う。
【0055】
このとき、矩形のショット領域S1は、走査方向に沿った姿勢で配置されているため、照明領域Aの中、同じ領域の照明光で露光されることになり、異なる領域の照明光で露光された場合のように、領域に応じて収差が変動する等の悪影響が及ぶことがない。そして、照明領域Aは期間T2でのY方向及びX方向の等速移動が終了すると、期間T3、T5で移動速度をVyから−Vy(Y方向)、及びVx(X方向)に対して加減速し、ウエハWはショット領域S2を走査露光するために角度θに回転される。
【0056】
この後、期間T6以降で上記と同様に、照明領域AをY方向については速度Vy、X方向については速度Vxで、Y方向に対する角度θの斜め方向に移動させる走査ステップと、照明領域AをX方向にステップ移動させるとともに、ウエハWを回転させる移動ステップとを交互に繰り返し行うことによって、複数のショット領域S1〜S3を順次露光することができる。このように、本実施の形態では、常に同じ領域の光源で露光されて光量分布が同じのため、露光エネルギの均一性が高まり、露光精度への悪影響を少なくすることが可能になる。
【0057】
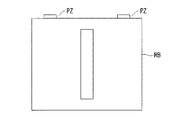
なお、上記第3の実施形態では、配列方向が走査方向に合致するようにウエハWを回転させ、且つ照明領域AをX方向に延在させた状態で走査露光を行うものとして説明したが、これに限定されるものではなく、例えば、図9に示すように、第2照明光学系IOP2に設けられる固定レチクルブラインドRBの一辺に、間隔をあけてピエゾ素子等からなる駆動部PZを設け、走査時のウエハWの姿勢に対応させて駆動部PZを個別に駆動することで、固定レチクルブラインドRBをXY平面内で照明光の光軸周りに回転させることができる。これにより、図7中に二点鎖線で示すように、角度θ傾いた照明領域A’を設定することができる。そのため、ウエハW上の任意の点が照明領域Aを通過する時間を短くすることができ、スループットを一層向上させることが可能になる。
【0058】
なお、上記実施の形態では、オプティカルインテグレータ(ホモジナイザ)としてフライアイレンズを用いるものとしたが、その代わりにロッド・インテグレ一夕(内面反射型インテグレータ)、回折光学素子あるいはマイクロレンズアレイ等を用いるようにしても良い。ロッド・インテグレータを用いる照明光学系では、ロッド・インテグレータはその射出面がレチクルRのパターン面とほぼ共役になるように配置されるので、例えばロッド・インテグレータの射出面に近接して前述の可動ブラインド28Jの可動ブレードを配置する。従って、この照明光学系はロッド・インテグレータを境にして2分割され、上記実施形態と同様に、可動ブラインドはロッド・インテグレータが配置される第1部分に設けられ、固定ブラインドは本体コラムに固定される第2部分に設けられる。なお、ロッド・インテグレータを用いる照明光学系は、例えば米国特許第5675401号に開示されている。また、フライアイレンズとロッド・インテグレータとを組み合わせる、あるいは2つのロッド・インテグレータを直列に配置してダブルオプティカルインテグレータとしても良い。さらには、回折光学素子とロッド・インテグレータ又はマイクロレンズアレイ等の組み合わせでダブルインテグレータを構成してもよい。
【0059】
また、上記実施形態では、防振ユニット42A〜42Dとしてアクティブ防振装置を用いる場合について説明したが、本発明がこれに限定されないことは勿論である。すなわち、これらはパッシブ防振装置であっても良い。
【0060】
また、例えば、上記実施形態と同様に紫外光を用いる露光装置であっても、投影光学系として反射光学素子のみからなる反射系、又は反射光学素子と屈折光学素子とを有する反射屈折系(カタッディオプトリック系)を採用しても良い。ここで、反射屈折型の投影光学系としては、例えば特開平8―171054号公報(及びこれに対応する米国特許第5,668,672号)、並びに特開平10−20195号公報(及びこれに対応する米国特許第5,835,275号)などに開示される、反射光学素子としてビームスプリッタと凹面鏡とを有する反射屈折系、又は特開平8−334695号公報(及びこれに対応する米国特許第5,689,377号)、並びに特開平10−3039号公報(及びこれに対応する米国特許出願第873,605号(出願日:1997年6月12日))などに開示される、反射光学素子としてビームスプリッタを用いずに凹面鏡などを有する反射屈折系を用いることができる。
【0061】
この他、特開平10−104513号公報(及び米国特許第5,488,229号)に開示される、複数の屈折光学素子と2枚のミラー(凹面鏡である主鏡と、屈折素子又は平行平面板の入射面と反対側に反射面が形成される裏面鏡である副鏡)とを同一軸上に配置し、その複数の屈折光学素子によって形成されるレチクルパターンの中間像を、主鏡と副鏡とによってウエハ上に再結像させる反射屈折系を用いても良い。この反射屈折系では、複数の屈折光学素子に続けて主鏡と副鏡とが配置され、照明光が主鏡の一部を通って副鏡、主鏡の順に反射され、さらに副鏡の一部を通ってウエハ上に達することになる。
【0062】
さらに、反射屈折型の投影光学系としては、例えば円形イメージフィールドを有し、かつ物体面側、及び像面側が共にテレセントリックであるとともに、その投影倍率が1/4倍又は1/5倍となる縮小系を用いても良い。また、この反射屈折型の投影光学系を備えた走査型露光装置の場合、照明光の照射領域が投影光学系の視野内でその光軸をほぼ中心とし、かつレチクル又はウエハの走査方向とほぼ直交する方向に沿つて延びる矩形スリット状に規定されるタイプであっても良い。かかる反射屈折型の投影光学系を備えた走査型露光装置によれば、例えば波長157nmのF2レーザ光を露光用照明光として用いても100nmL/Sパターン程度の微細パターンをウエハ上に高精度に転写することが可能である。
【0063】
また、真空紫外光としてArFエキシマレーザ光やF2レーザ光などが用いられるが、DFB半導体レーザ又はファイバーレーザから発振される赤外域、又は可視域の単一波長レーザ光を、例えばエルビウム(又はエルビウムとイットリビウムの両方)がドープされたファイバーアンプで増幅し、非線形光学結晶を用いて紫外光に波長変換した高調波を用いても良い。例えば、単一波長レーザの発振波長を1.51〜1.59μmの範囲内とすると、発生波長が189〜199nmの範囲内である8倍高調波、又は発生波長が151〜159nmの範囲内である10倍高調波が出力される。特に発振波長を1.544〜1.553μmの範囲内とすると、発生波長が193〜194nmの範囲内の8倍高調波、即ちArFエキシマレーザ光とほぼ同一波長となる紫外光が得られ、発振波長を1.57〜1.58μmの範囲内とすると、発生波長が157〜158nmの範囲内の10倍高調波、即ちF2レ−ザ光とほぼ同一波長となる紫外光が得られる。また、発振波長を1.03〜1.12μmの範囲内とすると、発生波長が147〜160nmの範囲内である7倍高調波が出力され、特に発振波長を1.099〜1.106μmの範囲内とすると、発生波長が157〜158μmの範囲内の7倍高調波、即ちF2レーザ光とほぼ同一波長となる紫外光が得られる。この場合、単一波長発振レーザとしては例えばイットリビウム・ドープ・ファイバーレーザを用いることができる。
【0064】
また、本実施の形態の基板としては、半導体デバイス用の半導体ウエハWのみならず、液晶ディスプレイデバイス用のガラス基板や、薄膜磁気ヘッド用のセラミックウエハ、あるいは露光装置で用いられるマスクまたはレチクルの原版(合成石英、シリコンウエハ)等が適用される。
【0065】
また、半導体素子などのマイクロデバイスだけでなく、光露光装置、EUV露光装置、X線露光装置、及び電子線露光装置などで使用されるレチクル又はマスクを製造するために、ガラス基板又はシリコンウエハなどに回路パターンを転写する露光装置にも本発明を適用できる。ここで、DUV(遠紫外)光やVUV(真空紫外)光などを用いる露光装置では一般的に透過型レチクルが用いられ、レチクル基板としては石英ガラス、フッ素がドープされた石英ガラス、蛍石、フッ化マグネシウム、又は水晶などが用いられる。また、プロキシミティ方式のX線露光装置、又は電子線露光装置などでは透過型マスク(ステンシルマスク、メンブレンマスク)が用いられ、マスク基板としてはシリコンウエハなどが用いられる。
【0066】
勿論、半導体素子の製造に用いられる露光装置だけでなく、液晶表示素子などを含むディスプレイの製造に用いられる、デバイスパターンをガラスプレート上に転写する露光装置、薄膜磁気へッドの製造に用いられる、デバイスパターンをセラミックウエハ上に転写する露光装置、及び撮像素子(CCDなど)の製造に用いられる露光装置などにも本発明を適用することができる。
【0067】
また、ウエハステージWSTやレチクルステージRSTにリニアモータ(米国特許第5,623,853号又は米国特許第5,528,118号の公報参照)を用いる場合は、エアべアリングを用いたエア浮上型に限らず、ローレンツ力又はリアクタンス力を用いた磁気浮上型のものを用いても良い。また、ステージは、ガイドに沿って移動するタイブでも良いし、ガイドを設けないガイドレスタイプでも良い。
【0068】
以上のように、本願実施形態の露光装置10は、本願特許請求の範囲に挙げられた各構成要素を含む各種サブシステムを、所定の機械的精度、電気的精度、光学的精度を保つように、組み立てることで製造される。これら各種精度を確保するために、この組み立ての前後には、各種光学系については光学的精度を達成するための調整、各種機械系については機械的精度を達成するための調整、各種電気系については電気的精度を達成するための調整が行われる。各種サブシステムから露光装置への組み立て工程は、各種サブシステム相互の、機械的接続、電気回路の配線接続、気圧回路の配管接続等が含まれる。この各種サブシステムから露光装置への組み立て工程の前に、各サブシステム個々の組み立て工程があることはいうまでもない。各種サブシステムの露光装置への組み立て工程が終了したら、総合調整が行われ、露光装置全体としての各種精度が確保される。なお、露光装置の製造は温度およびクリーン度等が管理されたクリーンルームで行うことが望ましい。
【0069】
半導体デバイスは、図10に示すように、デバイスの機能・性能設計を行うステップ201、この設計ステップに基づいたマスク(レチクル)を製作するステップ202、シリコン材料からウエハを製造するステップ203、前述した実施形態の露光装置10によりレチクルのパターンをウエハに露光するウエハ処理ステップ204、デバイス組み立てステップ(ダイシング工程、ボンディング工程、パッケージ工程を含む)205、検査ステップ206等を経て製造される。
【0070】
【発明の効果】
以上説明したように、本発明では、走査露光を実施する際に基板の移動に無駄な時間を生じさせず、スループットの向上に寄与できる。また、本発明では、高品質のデバイス製造が可能になる。
【図面の簡単な説明】
【図1】本発明に係る走査型露光装置の全体構成を概略的に示す図である。
【図2】同走査型露光装置における制御系の構成を示すブロック図である。
【図3】本発明の第1の実施形態を示す図であって、照明領域とショット領域との相対的な移動経路を示す図である。
【図4】図3におけるタイムチャート図である。
【図5】本発明の第2の実施形態における、照明領域とショット領域との相対的な移動経路を示す図である。
【図6】図5におけるタイムチャート図である。
【図7】本発明の第3の実施形態における、照明領域とショット領域との相対的な移動経路を示す図である。
【図8】図7におけるタイムチャート図である。
【図9】別の実施形態における固定レチクルブラインドの平面図である。
【図10】半導体デバイスの製造工程の一例を示すフローチャート図である。
【図11】従来技術における、照明領域とショット領域との相対的な移動経路を示す図である。
【符号の説明】
A 照明領域
R レチクル(マスク)
S1〜S3 ショット領域(区画領域)
W ウエハ(基板)
10 走査型露光装置
50 主制御装置(制御装置)
74 ウエハステージ駆動系(駆動装置)
【発明の属する技術分野】
本発明は、例えば半導体素子、液晶表示素子、撮像素子(CCD等)、又は薄膜磁気ヘッド等を製造するためのフォトリソグラフィ工程でマスク上のパターンを感光性の基板上に露光するために使用される走査型露光方法および走査型露光装置に関し、特に基板上の複数の区画領域に順次パターンを露光する走査型露光方法および走査型露光装置に適用して好適なものである。
【0002】
【従来の技術】
従来、半導体素子等を製造するためのフォトリソグラフィ工程では、マスクとしてのレチクル上にほぼ正方形状の照明領域を設定し、該照明領域内のパターンを投影光学系を介して感光性基板としてのウエハ(又はガラスプレート等)上に露光するステッパー等の一括露光方式の投影露光装置が多用されていた。これに対して最近は、半導体素子等のチップパターンの大型化に対応するために、より大きなレチクルのパターンをウエハ上の各ショット領域に転写することが求められている。ところが、広い露光フィールドの全面でディストーションや像面湾曲等の収差を所定の許容値以下に抑制した投影光学系の設計及び製造は困難である。
【0003】
そのため、最近ではレチクル上に長方形又は円弧状等のスリット状の照明領域を設定し、該照明領域内のパターンを投影光学系を介してウエハ上に投影した状態で、レチクルとウエハとを投影光学系に対して同期走査しながらレチクルのパターンをウエハ上の各ショット領域に逐次露光する走査ステップと、走査方向と略直交する方向にウエハをステップ移動させる移動ステップとを交互に繰り返すステップ・アンド・スキャン方式等の走査露光型の投影露光装置が注目されている(特許文献1参照)。
【0004】
この走査露光型の投影露光装置は投影光学系の有効露光フィールドにほぼ内接するスリット状の露光領域に対してウエハを走査しながら露光するため、投影光学系の有効露光フィールドの直径を最大限に利用できる他、走査方向への転写パターンの長さはその有効露光フィールドの直径よりも長くできるため、結果として大面積のレチクルのパターンを小さい収差でウエハ上に転写できる。
【0005】
図11は、ウエハ(基板)W(及び不図示のレチクル)を露光光の矩形照明領域Aに対して相対移動させて、ウエハW上の複数のショット領域(区画領域)S1〜S3を露光する際の相対移動経路の例を簡略的に示す図である。この図に示すショット領域S1〜S3は、一回の走査ステップでレチクルのパターンがそれぞれ転写される領域が走査方向(スキャン方向)であるY方向に1つ、ステップ移動方向(非スキャン方向)であるX方向に3つ、互いに区画されて配置されたものである。なお、実際には、位置が固定された照明領域Aに対してウエハW(ショット領域)が移動するが、ここでは便宜上照明領域Aがショット領域S1〜S3に対して移動するものとして説明する。
【0006】
この場合、X方向に延在する照明領域Aは、+Y方向に相対移動することでショット領域S1を露光した後に+X方向にステップ移動する。続いて、走査方向を−Y方向に反転してショット領域S2を露光する。このように、Y方向への走査移動と、これと直交するX方向へのステップ移動とを繰り返すことにより、ウエハW上のショット領域S1〜S3を連続的に露光することが可能である。
【0007】
【特許文献1】
特開平4−196513号公報
【0008】
【発明が解決しようとする課題】
しかしながら、上述したような従来の走査型露光方法及び走査型露光装置には、以下のような問題が存在する。
露光処理に要する時間を短縮するためには、X方向へのステップ移動を走査ステップの終了と同時に行うことで実現できる。ところがX方向へのステップ移動量が多い場合には、走査方向に関して、移動方向を反転して次の露光開始位置に到達するまでに(例えば、ショット領域S1への露光が終了してショット領域S2の露光開始位置に到達するまでに)、X方向へのステップ移動が完了しない場合がある。このような場合は、X方向へのステップ移動が完了するのを待ってY方向の走査移動を行う必要があり、時間の無駄が生じてしまいスループットが低下するという問題があった。
【0009】
本発明は、以上のような点を考慮してなされたもので、基板の移動に無駄な時間を生じさせず、スループットの向上に寄与できる走査型露光方法及び走査型露光装置を提供することを目的とする。
【0010】
【課題を解決するための手段】
上記の目的を達成するために本発明は、実施の形態を示す図1ないし図9に対応付けした以下の構成を採用している。
本発明の走査型露光方法は、露光光の照明領域(A)に対して基板(W)を第1方向(Y方向)に走査移動させることによって基板(W)上の1つの区画領域(S1〜S3)を露光する走査ステップと、基板(W)を第1方向(Y方向)と交差する第2方向(X方向)へ移動させる移動ステップとを交互に繰り返し行うことによって、基板(W)上の複数の区画領域を露光する走査型露光方法であって、走査ステップ中に、第1方向(Y方向)に対して第2方向(X方向)成分を含む斜め方向に基板(W)を駆動することを特徴とするものである。
【0011】
また、本発明の走査型露光装置は、露光光の照明領域(A)に対して基板(W)を第1方向(Y方向)に走査移動させるとともに、走査移動の間に、基板(W)を第2方向(X方向)へ移動させる駆動装置(74)を有する走査型露光装置(10)であって、走査移動中に、第1方向(Y方向)に対して第2方向(X方向)成分を含む斜め方向に基板(W)を駆動するように駆動装置(74)を制御する制御装置(50)を備えたことを特徴とするものである。
【0012】
従って、本発明の走査型露光方法及び走査型露光装置では、走査ステップで第2方向(X方向)にも基板(W)が移動しているため、移動ステップで必要な第2方向(X方向)への移動量は、走査ステップで移動した量減少することになる。そのため、走査ステップのために移動ステップが完了するまで待つ時間を減少させることができるか、もしくは移動ステップが完了するまで待つ必要がなくなり、時間の無駄を減少させることが可能になり、スループットの向上が期待できる。
【0013】
【発明の実施の形態】
以下、本発明の走査型露光方法及び走査型露光装置の第1の実施形態を、図1ないし図4を参照して説明する。ここでは、例えば露光装置として、レチクルとウエハとを同期移動しつつ、レチクルに形成された半導体デバイスの回路パターンをウエハ上に転写する、スキャニング・ステッパ(走査型露光装置)を使用する場合の例を用いて説明する。これらの図において、従来例として示した図11と同一の構成要素には同一符号を付し、その説明を省略する。
【0014】
図1には、本発明に係る走査型露光装置10の全体構成が概略的に示されている。この露光装置10は、マスクとしてのレチクルRと、基板としてのウエハWとを一次元方向(ここでは、図1における紙面内左右方向であるY軸方向とする)に同期移動しつつ、レチクルRに形成された回路パターンを投影光学系PLを介してウエハW上の各ショット領域に転写する、ステップ・アンド・スキャン方式の走査型露光装置、いわゆるスキャニング・ステッパである。
【0015】
図1に示す露光装置10は、光源12からの露光用照明光によりレチクル(マスク)R上の矩形状(あるいは円弧状)の照明領域を均一な照度で照明する照明光学系IOP、レチクルRを保持して移動するレチクルステージ(マスクステージ)RST、レチクルRから射出される照明光(パルス紫外光)をウエハ(基板)W上に投影する投影光学系PL、ウエハWを保持して移動するウエハステージ(基板ステージ)WSTを備えている。さらに、露光装置10は、前記照明光学系IOPの一部,レチクルステージRST,投影光学系PL,及びウエハステージWST等を保持する本体コラム14、本体コラム14の振動を抑制あるいは除去する防振ユニット、及びこれらの制御系等を備えている。なお、ここで投影光学系PLの光軸方向をZ方向とし、このZ方向と直交する方向でレチクルRとウエハWの同期移動方向をY方向とし、非同期移動方向をX方向とする。また、それぞれの軸周りの回転方向をθZ、θY、θXとする。
【0016】
光源12としては、ここでは波長192〜194nmの間で酸素の吸収帯を避けるように狭帯化されたパルス紫外光を出力するArFエキシマレーザ光源が用いられており、この光源12の本体は、半導体製造工場のクリーンルーム内の床面FD上に設置されている。光源12には、不図示の光源制御装置が併設されており、この光源制御装置では、射出されるパルス紫外光の発振中心波長及びスペクトル半値幅の制御、パルス発振のトリガ制御、レーザチャンバ内のガスの制御等を行うようになっている。
【0017】
なお、光源12として、波長248nmのパルス紫外光を出力するKrFエキシマレーザ光源あるいは波長157nmのパルス紫外光を出力するF2レーザ光源等用いても良い。また、光源12をクリーンルームよりクリーン度が低い別の部屋(サービスルーム)、あるいはクリーンルームの床下に設けられるユーティリティスペースに設置しても構わない。
【0018】
光源12は、図1では作図の都合上その図示が省略されているが、実際には遮光性のベローズ及びパイプを介してビームマッチングユニットBMUの一端(入射端)に接続されており、このビームマッチングユニットBMUの他端(出射端)は、内部にリレー光学系を内蔵したパイプ16を介して照明光学系IOPの第1照明光学系IOP1に接続されている。ビームマッチングユニットBMU内には、リレー光学系や複数の可動反射鏡等(いずれも不図示)が設けられており、これらの可動反射鏡等を用いて光源12から入射する狭帯化されたパルス紫外光(ArFエキシマレーザ光)の光路を第1照明光学系IOP1との間で位置的にマッチングさせている。
【0019】
照明光学系IOPは、第1照明光学系IOP1と第2照明光学系IOP2との2部分から構成されている。第1照明光学系IOP1は、床面FDに水平に載置された装置の基準となるフレームキャスタと呼ばれるベースプレートBP上に設置されている。また、第2照明光学系IOP2は、本体コラム14を構成する後述する第2の支持コラム52によって下方から支持されている。
【0020】
第1照明光学系IOP1は、所定の位置関係で配置されたミラー、可変減光器、ビーム成形光学系、オプティカルインテグレータ、集光光学系、振動ミラー、照明系開口絞り板、ビームスプリッタ、リレーレンズ系、及びレチクルブラインド機構を構成する可動視野絞りとしての可動レチクルブラインド(照明領域設定装置)28J等を備えている。光源12からのパルス紫外光がビームマッチングユニットBMU及びリレー光学系を介して第1照明光学系IOP1内に水平に入射すると、このパルス紫外光は、可変減光器のNDフィルタにより所定のピーク強度に調整された後、ビーム整形光学系により、オプティカルインテグレータに効率よく入射するようにその断面形状が整形される。
【0021】
次いで、このパルス紫外光がオプティカルインテグレータに入射すると、射出端側に面光源、すなわち多数の光源像(点光源)から成る2次光源が形成される。これらの多数の点光源の各々から発散するパルス紫外光は、照明系開口絞り板上のいずれかの開口絞りを通過した後、露光光として可動レチクルブラインド28Jに到達する。
【0022】
可動レチクルブラインド28Jは、例えば2枚のL字型の可動ブレードと、この可動ブレードを駆動するアクチュエータ(いずれも不図示)とを有する。可動ブレードとしては、直線状に形成されたものがそれぞれ独立して移動自在に矩形配置されたものでもよい。これらの可動ブレードは、レチクルRの走査方向に対応する方向及び走査方向と直交する非走査方向に対応する方向の位置が可変となっている。この可動レチクルブラインド28Jは、不要な部分の露光を防止するため、走査露光の開始時及び終了時に可動ブレードにより、後述する固定レチクルブラインドによって規定されるレチクルR上の照明領域を更に制限するために用いられる。この可動レチクルブラインド28Jの駆動は、後述する主制御装置50によって制御される(図2参照)。
【0023】
第2照明光学系IOP2は、照明系ハウジング17内に所定の位置関係で収納された固定レチクルブラインド、レンズ、ミラー、リレーレンズ系、メインコンデンサレンズ等(いずれも不図示)を備えている。固定レチクルブラインドは、照明系ハウジング17の入射端近傍のレチクルRのパターン面に対する共役面から僅かにデフォーカスした面に配置され、レチクルR上の照明領域A(図3参照)を規定する所定形状の開口部が形成されている。この固定レチクルブラインドの開口部は、投影光学系PLの円形視野内の中央で走査露光時のレチクルRの移動方向(Y軸方向)と直交したX軸方向に直線的に伸びたスリット状又は矩形状に形成されているものとする。
【0024】
可動レチクルブラインド28Jのブレードの開口部を通過したパルス紫外光は、固定レチクルブラインドの開口部を一様な強度分布で照明する。固定レチクルブラインドの開口部を通ったパルス紫外光は、レンズ、ミラー、リレーレンズ系、主コンデンサレンズ系を経て、レチクルステージRST上に保持されたレチクルR上の所定の照明領域(X軸方向に直線的に伸びたスリット状又は矩形状の照明領域)Aを均一な照度分布で照明する。ここで、レチクルRに照射される矩形スリット状の照明光は、投影光学系PLの円形投影視野の中央にX軸方向(非走査方向)に細長く延びるように設定され、その照明光のY軸方向(走査方向)の幅はほぼ一定に設定されている。
【0025】
なお、第1照明光学系IOP1と第2照明光学系IOP2とを強固に接合すると、可動レチクルブラインド28Jの駆動に起因して露光動作中に第1照明光学系IOP1に生じる振動が第2のコラム52に支持された第2照明光学系IOP2にそのまま伝達されることとなって、好ましくない。このため、本実施形態では、第1照明光学系IOP1と第2照明光学系IOP2との間は、両者の相対変位を可能にし、かつその内部を外気に対して気密状態にすることが可能な接続部材としての伸縮自在の蛇腹状部材94を介して接合されている。
【0026】
図1に戻り、本体コラム14は、ベースプレートBP上に設けられた複数本(ここでは4本)の支持部材40A〜40D(但し、紙面奥側の支柱40C、40Dは図示省略)及びこれらの支持部材40A〜40Dの上部にそれぞれ固定された防振ユニット42A〜42D(但し、図1においては紙面奥側の防振ユニット42C、42Dは図示せず、図4参照)を介してほぼ水平に支持された鏡筒定盤44と、この鏡筒定盤44の下面から下方に吊り下げられた吊り下げコラム46と、鏡筒定盤44上に設けられた第1、第2の支持コラム48、52とを備えている。
【0027】
前記防振ユニット42A〜42Dは、支持部材40A〜40Dそれぞれの上部に直列(又は並列)に配置された内圧が調整可能なエアマウントとボイスコイルモータ(不図示)とを含んで構成されている。これらの防振ユニット42A〜42Dによって、ベースプレートBP及び支持部材40A〜40Dを介して鏡筒定盤44に伝わる床面FDからの微振動がマイクロGレベルで絶縁される構成になっている。
【0028】
前記鏡筒定盤44は鋳物等で構成されており、その中央部に平面視円形の開口が形成され、その内部に投影光学系PLがその光軸方向をZ軸方向として上方から挿入されている。投影光学系PLの鏡筒部の外周部には、該鏡筒部に一体化されたフランジFLGが設けられている。このフランジFLGの素材としては、低熱膨張の材質、例えばインバー(Inver;ニッケル36%、マンガン0.25%、及び微量の炭素と他の元素を含む鉄からなる低膨張の合金)が用いられており、このフランジFLGは、投影光学系PLを鏡筒定盤44に対して点と面とV溝とを介して3点で支持するいわゆるキネマティック支持マウントを構成している。このようなキネマティック支持構造を採用すると、投影光学系PLの鏡筒定盤44に対する組み付けが容易で、しかも組み付け後の鏡筒定盤44及び投影光学系PLの振動、温度変化、姿勢変化等に起因する応力を最も効果的に軽減できるという利点がある。
【0029】
前記吊り下げコラム46は、ウエハベース定盤54と、該ウエハベース定盤54をほぼ水平に吊り下げ支持する4本の吊り下げ部材56とを備えている。また、第1の支持コラム48は、鏡筒定盤44の上面に投影光学系PLを取り囲んで植設された4本の脚58(紙面奥側の脚は図示省略)と、これら4本の脚58によってほぼ水平に支持されたレチクルベース定盤60とを備えている。同様に、第2の支持コラム52は、鏡筒定盤44の上面に、第1の支持コラム48を取り囲む状態で植設された4本の支柱62(紙面奥側の支柱は図示省略)と、これら4本の支柱62によってほぼ水平に支持された天板64とによって構成されている。この第2の支持コラム52の天板64によって、前述した第2部分光学系IOP2が支持されている。
【0030】
また、本体コラム14を構成する鏡筒定盤44には、図1では図示が省略されているが、実際には、本体コラム14のZ方向の振動を計測する3つの振動センサ(例えば加速度計)とXY面内方向の振動を計測する加速度計などの3つの振動センサ(例えば、この内の2つの振動センサは、本体コラム14のY方向の振動を計測し、残りの振動センサは、本体コラム14のX方向の振動を計測する)とが取り付けられている。以下においては、便宜上、これら6つの振動センサを総称して振動センサ群66と呼ぶものとする。
【0031】
この振動センサ群66の計測値は、主制御装置50に供給されるようになっている(図2参照)。従って、主制御装置50では、振動センサ群66の計測値に基づいて本体コラム14の6自由度方向の振動を求めることができる。そして、主制御装置50では、例えばレチクルステージRST、ウエハステージWSTの移動時等には、振動センサ群66の計測値に基づいて求めた本体コラム14の6自由度方向の振動を除去すべく、防振ユニット42A〜42Dの速度制御を例えばフィードバック制御あるいはフィードバック制御及びフィードフォワード制御によって行い、本体コラム14の振動を効果的に抑制することが可能である。
【0032】
前記レチクルステージRSTは、本体コラム14を構成する第1の支持コラム48を構成するレチクルベース定盤60上に配置されている。レチクルステージRSTは、例えば磁気浮上型の2次元リニアアクチュエータ等から成るレチクルステージ駆動系68(図1では図示せず、図2参照)によって駆動され、レチクルRをレチクルベース定盤60上でY軸方向に大きなストロークで直線駆動するとともに、X軸方向とθz方向(Z軸回りの回転方向)に関しても微小駆動が可能な構成となっている。
【0033】
前記レチクルステージRSTの一部には、その位置や移動量を計測するための位置検出装置であるレチクルレーザ干渉計70からの測長ビームを反射する移動鏡72が取り付けられている。レチクルレーザ干渉計70は、レチクルベース定盤60に固定され、投影光学系PLの上端部側面に固定された固定鏡Mrを基準として、レチクルステージRST(すなわちレチクルR)のXY面内の位置(θz回転を含む)を例えば、0.5〜1nm程度の分解能で検出するようになっている。
【0034】
上記のレチクルレーザ干渉計70によって計測されるレチクルステージRST(即ちレチクルR)の位置情報(又は速度情報)は主制御装置50に送られる(図2参照)。主制御装置50は、基本的にはレチクルレーザ干渉計70から出力される位置情報(或いは速度情報)が指令値(目標位置、目標速度)と一致するようにレチクルステージ駆動系68を制御する。
【0035】
前記投影光学系PLとしては、ここでは、物体面(レチクルR)側と像面(ウエハW)側の両方がテレセントリックで円形の投影視野を有し、石英や螢石を光学硝材とした屈折光学素子(レンズ素子)のみから成る1/4、1/5、又は1/6縮小倍率の屈折光学系が使用されている。このため、レチクルRにパルス紫外光が照射されると、レチクルR上の回路パターン領域のうちのパルス紫外光によって照明された部分からの結像光束が投影光学系PLに入射し、その回路パターンの部分倒立像がパルス紫外光の各パルス照射の度に投影光学系PLの像面側の円形視野の中央にスリット状または矩形状(多角形)に制限されて結像される。これにより、投影された回路パターンの部分倒立像は、投影光学系PLの結像面に配置されたウエハW上の複数のショット領域のうちの1つのショット領域表面のレジスト層に縮小転写される。
【0036】
前記ウエハステージWSTは、前述した吊り下げコラム46を構成するウエハベース定盤54上に配置され、例えば磁気浮上型の2次元リニアアクチュエータ等から成るウエハステージ駆動系(駆動装置)74(図1では図示せず、図2参照)によってXY面内で自在に駆動されるようになっている。
【0037】
ウエハステージWSTの上面に、ウエハホルダ76を介してウエハWが真空吸着等によって固定されている。ウエハステージWSTのXY位置及び回転量(ヨーイング量、ローリング量、ピッチング量)は、投影光学系PLの鏡筒下端に固定された参照鏡Mwを基準としてウエハステージWSTの一部に固定された移動鏡78の位置変化を計測するウエハレーザ干渉計80によって所定の分解能、例えば0.5〜1nm程度の分解能でリアルタイムに計測される。このウエハレーザ干渉計80の計測値は、主制御装置50に供給されるようになっている(図2参照)。
【0038】
図2には、上述した露光装置10の制御系の構成が簡単に示されている。この制御系は、ワークステーション(又はマイクロコンピュータ)から成る主制御装置50を中心として構成されている。主制御装置50は、これまでに説明した各種の制御を行う他、装置全体を統括的に制御する。
【0039】
次に、上述のようにして構成された露光装置10における露光動作について説明する。
ウエハステージWST上にウエハWが搬送され、フォーカス調整が終了すると、不図示のアライメント系を用いてレチクルRとウエハWとを位置決め(アライメント)する。このようにして、ウエハWの露光のための準備動作が終了すると、主制御装置50では、アライメント結果に基づいてウエハレーザ干渉計80の計測値をモニタしつつウエハステージ駆動系74を制御してウエハWの第1ショットの露光のための走査開始位置にウエハステージWSTを移動する。
【0040】
そして、主制御装置50ではレチクルステージ駆動系68及びウエハステージ駆動系74を介してレチクルステージRSTとウエハステージWSTとのY方向の走査を開始し、両ステージRST、WSTがそれぞれの目標走査速度に達すると、パルス紫外光によってレチクルRのパターン領域が照明され始め、走査露光が開始される。なお、この走査露光の開始に先立って、光源12の発光は開始されているが、主制御装置50によってレチクルブラインド装置を構成する可動ブラインド28Jの各可動ブレードの移動がレチクルステージRSTの移動と同期制御されているため、レチクルR上のパターン領域外へのパルス紫外光の照射が遮光されることは、通常のスキャニング・ステッパと同様である。
【0041】
主制御装置50では、特に上記の走査露光時にレチクルステージRSTのY軸方向の移動速度VrとウエハステージWSTのY軸方向の移動速度Vwとが投影光学系PLの投影倍率(1/4倍、1/5倍あるいは1/6倍)に応じた速度比に維持されるようにレチクルステージ駆動系68及びウエハステージ駆動系74を介してレチクルステージRST及びウエハステージWSTを同期制御する。
【0042】
そして、レチクルRのパターン領域がパルス紫外光で逐次照明され、パターン領域全面に対する照明が完了することにより、ウエハW上の第1ショットの走査露光が終了する。これにより、レチクルRのパターンが投影光学系PLを介して第1ショットに縮小転写される。このようにして、第1ショットの走査露光が終了すると、主制御装置50によりウエハステージ駆動系74を介してウエハステージWSTがX軸方向にステップ移動され、第2ショットへの露光のため走査開始位置に移動される。このステッピングの際に、主制御装置50ではウエハステージWSTの位置(ウエハWの位置)を検出するウエハレーザ干渉計80の計測値に基づいてウエハステージWSTのX、Y、θz方向の位置変位をリアルタイムに計測する。この計測結果に基づき、主制御装置50ではウエハステージ駆動系74を制御してウエハステージWSTのXY位置変位が所定の状態になるようにウエハステージWSTの位置を制御する。
【0043】
また、主制御装置50ではウエハステージWSTのθz方向の変位の情報に基づいてレチクルステージ駆動系68を制御し、そのウエハW側の回転変位の誤差を補償するようにレチクルステージRSTを回転制御する。そして、主制御装置50では第2ショット領域に対して上記と同様の走査露光を行う。このようにして、ウエハW上のショットの走査露光(走査ステップ)と次ショット露光のためのステッピング動作(移動ステップ)とが繰り返し行われ、ウエハW上の露光対象ショット領域の全てにレチクルRのパターンが順次転写される。
【0044】
以下、図3を参照して、ウエハW上の複数のショット領域S1〜S3を露光する際に、照明領域Aと各ショット領域とを相対移動させる経路について説明する。なお、ここでも便宜上、照明領域Aがショット領域S1〜S3に対して移動するものとして説明する。また、レチクルステージRST(レチクルR)は、ウエハステージWST(ウエハW)の移動(X、Y、θz)に対して追従するため、ここでは主にウエハW上のショット領域S1〜S3と照明領域Aとの相対移動について言及する。
【0045】
照明領域Aは、ショット領域S1に対する走査露光を行うべく、移動を開始する。ここではY方向(第1方向)に対してX方向(第2方向)成分を含む斜め方向(Y方向に対して角度θの方向)に沿って照明領域Aを移動させる。
【0046】
このときのY方向及びX方向に関する照明領域Aの、時間と速度との関係を図4のタイムチャートに示す。このタイムチャートに示すように、X方向、Y方向の双方で、期間T1で走査時の速度(Vy、Vx)まで加速し、期間T2で等速移動する。この期間T2では、加速後の整定及びショット領域S1への走査露光が行われる。なお、照明領域Aが斜め方向に移動する場合は、ウエハW上の任意の点が照明領域Aを通過する時間が、Y方向に沿って移動する場合に比較して長くなるため、走査速度が同一の場合は、増加する走査時間に対応して走査開始前に予め照明光の光量を減じるステップを設けておくことが必要である。
【0047】
続いて、期間T2後の期間T3では、X方向の移動に関しては速度Vxでの等速移動を継続するが、Y方向の移動については走査方向を反転するために速度0まで一旦減速する。そして、Y方向の移動速度が0に達すると、照明領域Aは、期間T4ではY方向については移動を停止した状態で、X方向に関してショット領域S2の走査開始位置までステップ移動を行うために加減速を行う。このときのステップ移動距離は、走査ステップでX方向にも移動している分、短くなっている。
【0048】
照明領域Aは、ショット領域S2に対する走査開始位置に達すると、期間T5でY方向の移動については走査速度Vy(方向は逆)まで加速し、X方向については+X方向へ速度Vxで等速移動を行う。この後、期間T6以降で上記と同様に、照明領域AをY方向については速度Vy、X方向については速度Vxで、Y方向に対する角度θの斜め方向に移動させる走査ステップと、X方向にのみステップ移動させる移動ステップとを交互に繰り返し行うことによって、複数のショット領域S1〜S3を順次露光することができる。
【0049】
このように、本実施の形態では、走査ステップ中に照明領域AがX方向にも移動するので、走査ステップと移動ステップとが重複することになり、走査露光後のX方向の移動距離を短くすることが可能になり、次の走査ステップを開始するまでの時間の無駄を少なくすることができる。そのため、露光処理に係るスループットの低下を抑えることができ、生産性向上に寄与することが可能になる。また、本実施の形態では、走査開始前に予め照明光の光量を減じているので、照明領域Aが斜め方向に移動することによる光量過多を未然に防ぐことができ、高品質のデバイス製造が可能になる。
【0050】
図5及び図6は、本発明の走査型露光方法及び走査型露光装置の第2の実施の形態を示す図である。これらの図において、図1乃至図4に示す第1の実施の形態の構成要素と同一の要素については同一符号を付し、その説明を省略する。第2の実施の形態と上記の第1の実施の形態とが異なる点は、照明領域Aの移動速度である。
【0051】
図5に示すように、本実施の形態では移動ステップにおける照明領域Aの移動は曲線の移動軌跡を描くように設定されている。すなわち、本実施の形態では、図6に示すように、照明領域Aは期間T2でのY方向及びX方向の等速移動が終了すると、Y方向に関して期間T3、T5で移動速度をVyからショット領域S2を走査露光する際の−Vyに変更して移動方向を反転するが、X方向に関しても、この期間T3、T5で移動速度をVxから加速するとともに、ショット領域S2を走査露光する際の速度Vxまで減速することで、X方向及びY方向に関する移動ステップが終了する。なお、X軸の速度曲線(図面には直線で示されているが、実際には曲線となる)は必ずしもY軸の速度ゼロ位置を中心とする左右対称な曲線である必要はない。
【0052】
換言すると、本実施の形態では、X方向への移動ステップが完了するのを待つことなくY方向への移動ステップを完了させて走査ステップを開始することができる。従って、本実施の形態では、次の走査ステップを開始するまでの無駄な時間(図4中、期間T4に相当)を削除することができ、露光処理に係るスループットを大幅に向上させることが可能になる。
【0053】
図7及び図8は、本発明の走査型露光方法及び走査型露光装置の第3の実施の形態を示す図である。これらの図において、図5及び図6に示す第2の実施の形態の構成要素と同一の要素については同一符号を付し、その説明を省略する。第3の実施の形態と上記の第2の実施形態とが異なる点は、照明領域Aが移動する際のウエハWの姿勢である。
【0054】
図7に示すように、照明領域AはY方向に対して角度θの斜め方向に走査移動するが、本実施の形態では、ショット領域S1の配列方向がこの走査方向に合致するように、走査時にウエハWを照明光の光軸周りに回転させている。すなわち、図8のタイムチャートに示すように、走査開始前にウエハステージWSTを介してウエハWの回転を開始し、Y方向及びX方向の走査速度までの加速期間T1で角度−θの回転を完了させる。そして、期間T2でショット領域S1への走査露光を行う。
【0055】
このとき、矩形のショット領域S1は、走査方向に沿った姿勢で配置されているため、照明領域Aの中、同じ領域の照明光で露光されることになり、異なる領域の照明光で露光された場合のように、領域に応じて収差が変動する等の悪影響が及ぶことがない。そして、照明領域Aは期間T2でのY方向及びX方向の等速移動が終了すると、期間T3、T5で移動速度をVyから−Vy(Y方向)、及びVx(X方向)に対して加減速し、ウエハWはショット領域S2を走査露光するために角度θに回転される。
【0056】
この後、期間T6以降で上記と同様に、照明領域AをY方向については速度Vy、X方向については速度Vxで、Y方向に対する角度θの斜め方向に移動させる走査ステップと、照明領域AをX方向にステップ移動させるとともに、ウエハWを回転させる移動ステップとを交互に繰り返し行うことによって、複数のショット領域S1〜S3を順次露光することができる。このように、本実施の形態では、常に同じ領域の光源で露光されて光量分布が同じのため、露光エネルギの均一性が高まり、露光精度への悪影響を少なくすることが可能になる。
【0057】
なお、上記第3の実施形態では、配列方向が走査方向に合致するようにウエハWを回転させ、且つ照明領域AをX方向に延在させた状態で走査露光を行うものとして説明したが、これに限定されるものではなく、例えば、図9に示すように、第2照明光学系IOP2に設けられる固定レチクルブラインドRBの一辺に、間隔をあけてピエゾ素子等からなる駆動部PZを設け、走査時のウエハWの姿勢に対応させて駆動部PZを個別に駆動することで、固定レチクルブラインドRBをXY平面内で照明光の光軸周りに回転させることができる。これにより、図7中に二点鎖線で示すように、角度θ傾いた照明領域A’を設定することができる。そのため、ウエハW上の任意の点が照明領域Aを通過する時間を短くすることができ、スループットを一層向上させることが可能になる。
【0058】
なお、上記実施の形態では、オプティカルインテグレータ(ホモジナイザ)としてフライアイレンズを用いるものとしたが、その代わりにロッド・インテグレ一夕(内面反射型インテグレータ)、回折光学素子あるいはマイクロレンズアレイ等を用いるようにしても良い。ロッド・インテグレータを用いる照明光学系では、ロッド・インテグレータはその射出面がレチクルRのパターン面とほぼ共役になるように配置されるので、例えばロッド・インテグレータの射出面に近接して前述の可動ブラインド28Jの可動ブレードを配置する。従って、この照明光学系はロッド・インテグレータを境にして2分割され、上記実施形態と同様に、可動ブラインドはロッド・インテグレータが配置される第1部分に設けられ、固定ブラインドは本体コラムに固定される第2部分に設けられる。なお、ロッド・インテグレータを用いる照明光学系は、例えば米国特許第5675401号に開示されている。また、フライアイレンズとロッド・インテグレータとを組み合わせる、あるいは2つのロッド・インテグレータを直列に配置してダブルオプティカルインテグレータとしても良い。さらには、回折光学素子とロッド・インテグレータ又はマイクロレンズアレイ等の組み合わせでダブルインテグレータを構成してもよい。
【0059】
また、上記実施形態では、防振ユニット42A〜42Dとしてアクティブ防振装置を用いる場合について説明したが、本発明がこれに限定されないことは勿論である。すなわち、これらはパッシブ防振装置であっても良い。
【0060】
また、例えば、上記実施形態と同様に紫外光を用いる露光装置であっても、投影光学系として反射光学素子のみからなる反射系、又は反射光学素子と屈折光学素子とを有する反射屈折系(カタッディオプトリック系)を採用しても良い。ここで、反射屈折型の投影光学系としては、例えば特開平8―171054号公報(及びこれに対応する米国特許第5,668,672号)、並びに特開平10−20195号公報(及びこれに対応する米国特許第5,835,275号)などに開示される、反射光学素子としてビームスプリッタと凹面鏡とを有する反射屈折系、又は特開平8−334695号公報(及びこれに対応する米国特許第5,689,377号)、並びに特開平10−3039号公報(及びこれに対応する米国特許出願第873,605号(出願日:1997年6月12日))などに開示される、反射光学素子としてビームスプリッタを用いずに凹面鏡などを有する反射屈折系を用いることができる。
【0061】
この他、特開平10−104513号公報(及び米国特許第5,488,229号)に開示される、複数の屈折光学素子と2枚のミラー(凹面鏡である主鏡と、屈折素子又は平行平面板の入射面と反対側に反射面が形成される裏面鏡である副鏡)とを同一軸上に配置し、その複数の屈折光学素子によって形成されるレチクルパターンの中間像を、主鏡と副鏡とによってウエハ上に再結像させる反射屈折系を用いても良い。この反射屈折系では、複数の屈折光学素子に続けて主鏡と副鏡とが配置され、照明光が主鏡の一部を通って副鏡、主鏡の順に反射され、さらに副鏡の一部を通ってウエハ上に達することになる。
【0062】
さらに、反射屈折型の投影光学系としては、例えば円形イメージフィールドを有し、かつ物体面側、及び像面側が共にテレセントリックであるとともに、その投影倍率が1/4倍又は1/5倍となる縮小系を用いても良い。また、この反射屈折型の投影光学系を備えた走査型露光装置の場合、照明光の照射領域が投影光学系の視野内でその光軸をほぼ中心とし、かつレチクル又はウエハの走査方向とほぼ直交する方向に沿つて延びる矩形スリット状に規定されるタイプであっても良い。かかる反射屈折型の投影光学系を備えた走査型露光装置によれば、例えば波長157nmのF2レーザ光を露光用照明光として用いても100nmL/Sパターン程度の微細パターンをウエハ上に高精度に転写することが可能である。
【0063】
また、真空紫外光としてArFエキシマレーザ光やF2レーザ光などが用いられるが、DFB半導体レーザ又はファイバーレーザから発振される赤外域、又は可視域の単一波長レーザ光を、例えばエルビウム(又はエルビウムとイットリビウムの両方)がドープされたファイバーアンプで増幅し、非線形光学結晶を用いて紫外光に波長変換した高調波を用いても良い。例えば、単一波長レーザの発振波長を1.51〜1.59μmの範囲内とすると、発生波長が189〜199nmの範囲内である8倍高調波、又は発生波長が151〜159nmの範囲内である10倍高調波が出力される。特に発振波長を1.544〜1.553μmの範囲内とすると、発生波長が193〜194nmの範囲内の8倍高調波、即ちArFエキシマレーザ光とほぼ同一波長となる紫外光が得られ、発振波長を1.57〜1.58μmの範囲内とすると、発生波長が157〜158nmの範囲内の10倍高調波、即ちF2レ−ザ光とほぼ同一波長となる紫外光が得られる。また、発振波長を1.03〜1.12μmの範囲内とすると、発生波長が147〜160nmの範囲内である7倍高調波が出力され、特に発振波長を1.099〜1.106μmの範囲内とすると、発生波長が157〜158μmの範囲内の7倍高調波、即ちF2レーザ光とほぼ同一波長となる紫外光が得られる。この場合、単一波長発振レーザとしては例えばイットリビウム・ドープ・ファイバーレーザを用いることができる。
【0064】
また、本実施の形態の基板としては、半導体デバイス用の半導体ウエハWのみならず、液晶ディスプレイデバイス用のガラス基板や、薄膜磁気ヘッド用のセラミックウエハ、あるいは露光装置で用いられるマスクまたはレチクルの原版(合成石英、シリコンウエハ)等が適用される。
【0065】
また、半導体素子などのマイクロデバイスだけでなく、光露光装置、EUV露光装置、X線露光装置、及び電子線露光装置などで使用されるレチクル又はマスクを製造するために、ガラス基板又はシリコンウエハなどに回路パターンを転写する露光装置にも本発明を適用できる。ここで、DUV(遠紫外)光やVUV(真空紫外)光などを用いる露光装置では一般的に透過型レチクルが用いられ、レチクル基板としては石英ガラス、フッ素がドープされた石英ガラス、蛍石、フッ化マグネシウム、又は水晶などが用いられる。また、プロキシミティ方式のX線露光装置、又は電子線露光装置などでは透過型マスク(ステンシルマスク、メンブレンマスク)が用いられ、マスク基板としてはシリコンウエハなどが用いられる。
【0066】
勿論、半導体素子の製造に用いられる露光装置だけでなく、液晶表示素子などを含むディスプレイの製造に用いられる、デバイスパターンをガラスプレート上に転写する露光装置、薄膜磁気へッドの製造に用いられる、デバイスパターンをセラミックウエハ上に転写する露光装置、及び撮像素子(CCDなど)の製造に用いられる露光装置などにも本発明を適用することができる。
【0067】
また、ウエハステージWSTやレチクルステージRSTにリニアモータ(米国特許第5,623,853号又は米国特許第5,528,118号の公報参照)を用いる場合は、エアべアリングを用いたエア浮上型に限らず、ローレンツ力又はリアクタンス力を用いた磁気浮上型のものを用いても良い。また、ステージは、ガイドに沿って移動するタイブでも良いし、ガイドを設けないガイドレスタイプでも良い。
【0068】
以上のように、本願実施形態の露光装置10は、本願特許請求の範囲に挙げられた各構成要素を含む各種サブシステムを、所定の機械的精度、電気的精度、光学的精度を保つように、組み立てることで製造される。これら各種精度を確保するために、この組み立ての前後には、各種光学系については光学的精度を達成するための調整、各種機械系については機械的精度を達成するための調整、各種電気系については電気的精度を達成するための調整が行われる。各種サブシステムから露光装置への組み立て工程は、各種サブシステム相互の、機械的接続、電気回路の配線接続、気圧回路の配管接続等が含まれる。この各種サブシステムから露光装置への組み立て工程の前に、各サブシステム個々の組み立て工程があることはいうまでもない。各種サブシステムの露光装置への組み立て工程が終了したら、総合調整が行われ、露光装置全体としての各種精度が確保される。なお、露光装置の製造は温度およびクリーン度等が管理されたクリーンルームで行うことが望ましい。
【0069】
半導体デバイスは、図10に示すように、デバイスの機能・性能設計を行うステップ201、この設計ステップに基づいたマスク(レチクル)を製作するステップ202、シリコン材料からウエハを製造するステップ203、前述した実施形態の露光装置10によりレチクルのパターンをウエハに露光するウエハ処理ステップ204、デバイス組み立てステップ(ダイシング工程、ボンディング工程、パッケージ工程を含む)205、検査ステップ206等を経て製造される。
【0070】
【発明の効果】
以上説明したように、本発明では、走査露光を実施する際に基板の移動に無駄な時間を生じさせず、スループットの向上に寄与できる。また、本発明では、高品質のデバイス製造が可能になる。
【図面の簡単な説明】
【図1】本発明に係る走査型露光装置の全体構成を概略的に示す図である。
【図2】同走査型露光装置における制御系の構成を示すブロック図である。
【図3】本発明の第1の実施形態を示す図であって、照明領域とショット領域との相対的な移動経路を示す図である。
【図4】図3におけるタイムチャート図である。
【図5】本発明の第2の実施形態における、照明領域とショット領域との相対的な移動経路を示す図である。
【図6】図5におけるタイムチャート図である。
【図7】本発明の第3の実施形態における、照明領域とショット領域との相対的な移動経路を示す図である。
【図8】図7におけるタイムチャート図である。
【図9】別の実施形態における固定レチクルブラインドの平面図である。
【図10】半導体デバイスの製造工程の一例を示すフローチャート図である。
【図11】従来技術における、照明領域とショット領域との相対的な移動経路を示す図である。
【符号の説明】
A 照明領域
R レチクル(マスク)
S1〜S3 ショット領域(区画領域)
W ウエハ(基板)
10 走査型露光装置
50 主制御装置(制御装置)
74 ウエハステージ駆動系(駆動装置)
Claims (8)
- 露光光の照明領域に対して基板を第1方向に走査移動させることによって前記基板上の1つの区画領域を露光する走査ステップと、前記基板を前記第1方向と交差する第2方向へ移動させる移動ステップとを交互に繰り返し行うことによって、前記基板上の複数の区画領域を露光する走査型露光方法であって、
前記走査ステップ中に、前記第1方向に対して前記第2方向成分を含む斜め方向に前記基板を駆動することを特徴とする走査型露光方法。 - 請求項1記載の走査型露光方法において、
前記走査ステップ前に、前記露光光の光軸周りに前記基板を回転させる回転ステップを含むことを特徴とする走査型露光方法。 - 請求項2記載の走査型露光方法において、
前記基板の回転に応じて前記照明領域を回転させることを特徴とする走査型露光方法。 - 請求項1から3のいずれかに記載の走査型露光方法において、
前記移動ステップを前記走査ステップと重複して実施することを特徴とする走査型露光方法。 - 請求項1から4のいずれかに記載の走査型露光方法において、
前記走査ステップで前記基板上の任意の点が前記照明領域を通過する時間に基づいて、前記露光光の光量を調整する調整ステップを含むことを特徴とする走査型露光方法。 - 請求項1から5のいずれかに記載の走査型露光方法において、
パターンを有するマスクを前記基板と同期移動させることを特徴とする走査型露光方法。 - 請求項6記載の走査型露光方法において、
前記マスクのパターンは、1回の前記走査ステップで前記基板上に転写されることを特徴とする走査型露光方法。 - 露光光の照明領域に対して基板を第1方向に走査移動させるとともに、前記走査移動の間に、前記基板を第2方向へ移動させる駆動装置を有する走査型露光装置であって、
前記走査移動中に、前記第1方向に対して前記第2方向成分を含む斜め方向に前記基板を駆動するように前記駆動装置を制御する制御装置を備えたことを特徴とする走査型露光装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002323881A JP2004158689A (ja) | 2002-11-07 | 2002-11-07 | 走査型露光方法及び走査型露光装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002323881A JP2004158689A (ja) | 2002-11-07 | 2002-11-07 | 走査型露光方法及び走査型露光装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004158689A true JP2004158689A (ja) | 2004-06-03 |
Family
ID=32803635
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002323881A Withdrawn JP2004158689A (ja) | 2002-11-07 | 2002-11-07 | 走査型露光方法及び走査型露光装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004158689A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010147467A (ja) * | 2008-12-22 | 2010-07-01 | Asml Netherlands Bv | リソグラフィ装置および制御方法 |
| JP2012524390A (ja) * | 2009-04-20 | 2012-10-11 | エーエスエムエル ネザーランズ ビー.ブイ. | リソグラフィ投影装置およびデバイス製造方法 |
-
2002
- 2002-11-07 JP JP2002323881A patent/JP2004158689A/ja not_active Withdrawn
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010147467A (ja) * | 2008-12-22 | 2010-07-01 | Asml Netherlands Bv | リソグラフィ装置および制御方法 |
| US8570490B2 (en) | 2008-12-22 | 2013-10-29 | Asml Netherlands B.V. | Lithographic apparatus and control method |
| JP2012524390A (ja) * | 2009-04-20 | 2012-10-11 | エーエスエムエル ネザーランズ ビー.ブイ. | リソグラフィ投影装置およびデバイス製造方法 |
| JP2015092606A (ja) * | 2009-04-20 | 2015-05-14 | エーエスエムエル ネザーランズ ビー.ブイ. | 電気コネクタ及び電気接続システム |
| US9112300B2 (en) | 2009-04-20 | 2015-08-18 | Asml Netherlands B.V. | Electrical connector for lithographic projection apparatus |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6891603B2 (en) | Manufacturing method in manufacturing line, manufacturing method for exposure apparatus, and exposure apparatus | |
| US6538719B1 (en) | Exposure apparatus and exposure method, and device and method for producing the same | |
| US6710850B2 (en) | Exposure apparatus and exposure method | |
| US20020080339A1 (en) | Stage apparatus, vibration control method and exposure apparatus | |
| WO1999063585A1 (en) | Scanning aligner, method of manufacture thereof, and method of manufacturing device | |
| US8064067B2 (en) | Exposure apparatus and exposure method | |
| JP2004064076A (ja) | 変形ミラー構造体、変形ミラーの制御方法及び露光装置 | |
| JPWO1999027569A1 (ja) | 露光装置及び露光方法、並びにデバイス製造方法 | |
| US6366342B2 (en) | Drive apparatus, exposure apparatus, and method of using the same | |
| US20040156026A1 (en) | Exposure apparatus and exposure method | |
| JP2005311020A (ja) | 露光方法及びデバイス製造方法 | |
| US6008885A (en) | Scanning exposure apparatus | |
| JP4311711B2 (ja) | 露光装置及びデバイス製造方法 | |
| US20030147155A1 (en) | Optical element holding device | |
| WO2011040488A1 (ja) | 照明光学装置、露光装置及びデバイス製造方法 | |
| US7158209B2 (en) | Holding mechanism in exposure apparatus, and device manufacturing method | |
| JP2004063847A (ja) | 露光装置、露光方法、及びステージ装置 | |
| JP2005276932A (ja) | 露光装置及びデバイス製造方法 | |
| US9304385B2 (en) | Exposure method and device manufacturing method including selective deformation of a mask | |
| JP6826692B2 (ja) | 振動絶縁システムおよびリソグラフィ装置 | |
| JP2001035773A (ja) | 照明光学装置及び露光装置 | |
| JP2004158689A (ja) | 走査型露光方法及び走査型露光装置 | |
| JP2012033921A (ja) | 露光装置及びデバイス製造方法 | |
| JP2004172470A (ja) | ブラインド駆動方法と照明領域規制装置および走査型露光方法並びに走査型露光装置 | |
| JP2002198292A (ja) | 露光装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20060110 |