JP2004177172A - モータ駆動装置及び電子時計 - Google Patents
モータ駆動装置及び電子時計 Download PDFInfo
- Publication number
- JP2004177172A JP2004177172A JP2002341143A JP2002341143A JP2004177172A JP 2004177172 A JP2004177172 A JP 2004177172A JP 2002341143 A JP2002341143 A JP 2002341143A JP 2002341143 A JP2002341143 A JP 2002341143A JP 2004177172 A JP2004177172 A JP 2004177172A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- rotor
- drive pulse
- reference value
- temperature
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000010687 lubricating oil Substances 0.000 claims abstract description 20
- 238000001514 detection method Methods 0.000 claims description 23
- 230000006698 induction Effects 0.000 abstract 2
- 238000000034 method Methods 0.000 description 8
- 230000007423 decrease Effects 0.000 description 4
- 230000010355 oscillation Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
Images


Landscapes
- Electromechanical Clocks (AREA)
Abstract
【課題】温度による潤滑油の粘度変化の影響を受けずに正確にロータの回転を検出できるようにすること。
【解決手段】温度センサ106は温度を検出する。制御回路105は温度センサ106で検出した温度に応じた基準値を出力するように基準電圧発生回路108に指示する。回転検出回路107は基準値とロータの回転によって生じる誘起信号とを比較し、誘起信号が基準値未満のときはモータが非回転と判断し、制御回路105はモータドライバ103に対して、通常駆動パルスP1よりも幅広の補正駆動パルスP2を出力するように指示する。モータドライバ103は、補正駆動パルスP2によりモータ104を回転駆動する。
【選択図】 図1
【解決手段】温度センサ106は温度を検出する。制御回路105は温度センサ106で検出した温度に応じた基準値を出力するように基準電圧発生回路108に指示する。回転検出回路107は基準値とロータの回転によって生じる誘起信号とを比較し、誘起信号が基準値未満のときはモータが非回転と判断し、制御回路105はモータドライバ103に対して、通常駆動パルスP1よりも幅広の補正駆動パルスP2を出力するように指示する。モータドライバ103は、補正駆動パルスP2によりモータ104を回転駆動する。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、ステッピングモータ等を回転駆動するためのモータ駆動装置及び前記モータ駆動装置を用いた電子時計に関する。
【0002】
【従来の技術】
従来から、アナログ電子時計において、ロータ収容用貫通孔及びロータの停止位置を決める位置決め部を有するステータと、前記ロータ収容用貫通孔内に配設されたロータと、コイルとを有し、前記コイルに交番信号を供給して前記ステータに磁束を発生させることによって前記ロータを回転させると共に、前記位置決め部に対応する位置に前記ロータを停止するようにしたステッピングモータが使用されている。
【0003】
ステッピングモータ等を回転駆動するためのモータ駆動装置としては、例えば、特許文献1に示すような装置がある。
即ち、特許文献1記載のモータ駆動装置においては、通常の回転駆動時には、所定パルス幅の通常駆動パルスP1でモータを回転駆動する。ロータの回転によって発生する誘起電圧を駆動コイルに接続した回転検出用抵抗にて検出し、前記誘起記電圧と所定の基準電圧とをコンパレータによって比較する。前記誘起電圧が前記基準電圧より小さいときはロータが回転していないと判定し、通常駆動パルスP1よりもパルス幅の広い補正駆動パルスP2を用いてモータを回転駆動する。
【0004】
これにより、通常時には幅狭の通常駆動パルスP1で駆動すると共に通常駆動パルスP1では回転しなかったとき(非回転時)にのみ幅広の補正駆動パルスP2で駆動することにより、確実にモータを回転駆動することが可能になる。また、常に幅広の補正駆動パルスP2により回転駆動する場合に比べて、少ない消費電力でモータを回転させることが可能になる。
【0005】
ところで、モータにはロータの回転を円滑にするために、前記ロータの支持部分に潤滑油が使用されている。特許文献1記載の発明では、低温下での潤滑油の粘度上昇で負荷が増大したとき、通常駆動パルスP1でロータが回転した場合でも、回転速度が減少して誘起電圧が小さくなり、非回転と判定することになるため、常時、補正駆動パルスP2を印加してしまう恐れがある。このため、モータは回転しているにもかかわらず、モータには大電流が流れ、消費電力が大きくなるという問題がある。
【0006】
図3は、モータの回転・非回転に応じて、通常駆動パルスP1や補正駆動パルスP2によって回転駆動する際の動作を説明するための表である。
図3に示すように、潤滑油は、常温時は粘度が小さく、低温時(例えば、0℃〜−10℃以下)では粘度が大きくなる。
したがって、常温時には、モータの回転速度が大きいため、誘起電圧Vrsとして大きな信号が得られる。誘起電圧Vrsと所定の基準電圧Vcompの大小関係を比較して、誘起電圧Vrsが基準電圧Vcomp以上の時は、モータが回転したと判定して補正駆動パルスは出力しない。この場合、次に供給する駆動パルスは、直前に供給した通常駆動パルスP1とは逆相の通常駆動パルスであり、180度位相の異なる通常駆動パルスP1を交互に供給することによって、ロータを180度ずつ連続的に回転させる。
【0007】
一方、誘起電圧Vrsが基準電圧Vcomp未満の時は、モータが回転していないと判定して直前の通常駆動パルスP1と同相の補正駆動パルスP2を出力することにより、モータを確実に回転させる。尚、この場合、次に供給する駆動パルスは、直前に供給した通常駆動パルスP1とは逆相の通常駆動パルスP1である。
低温時にも前記同様にしてモータの回転・非回転を検出して、その結果に応じた駆動パルスを出力する。しかしながら、低温時には、モータの回転速度は小さいため、誘起電圧Vrsが小さくなる。したがって、斜線で示す領域のように、本来であれば回転と判定すべきところを、誘起電圧Vrsが基準電圧Vcomp未満になるため非回転と誤判定してしまい、非回転であったロータを確実に回転させるために、次の駆動パルスとして、前回供給した通常駆動パルスP1と同相の補正駆動パルスP2をモータに出力してしまう。実際にはロータは回転してしまっているため、この補正駆動パルスP2は回転動作には何ら寄与せず、全く無駄な消費電力となる。
【0008】
この問題を解決する方法として、特許文献2に記載されているように、誘起電圧検出用抵抗Rsを複数用意しておき、複数の基準電圧Vcompを設定する方法が考えられる。
また、特許文献3に記載されているように、温度センサを搭載し、温度変化に応じて駆動電圧波形を変化させるようにすることも考えられる。
【0009】
【特許文献1】
特公昭63−18148号公報
【特許文献2】
特公昭61−15383号公報
【特許文献3】
実開昭55−66号公報
【0010】
【発明が解決しようとする課題】
しかしながら、特許文献2の方法を採用するにしても、温度による潤滑油の粘度変化の影響に対応した適切な基準電圧を複数の中から選定することは困難という問題がある。また、特許文献3の方法では、モータが回転した際に、これを非回転と誤検出することによる消費電力の増大を回避することはできないという問題がある。
したがって、温度による潤滑油の粘度変化によってロータの回転検出が不正確になるという問題がある。
また、温度による潤滑油の粘度変化によりロータの回転検出が不正確になることによって、消費電力が不必要に増加するという問題がある。
【0011】
本発明は、かかる問題点に鑑みて成されたもので、温度による潤滑油の粘度変化の影響を受けずに正確にロータの回転を検出できるようにすることを課題としている。
また、本発明は、かかる問題点に鑑みて成されたもので、温度による潤滑油の粘度変化の影響を受けずに正確にロータの回転を検出することによって、不必要な消費電力の増加を回避することを課題としている。
【0012】
【課題を解決するための手段】
本発明によれば、潤滑油によってロータが円滑に回転するようにしたモータを回転駆動するモータ駆動装置において、温度を検出する温度検出手段と、前記温度検出手段で検出した温度に応じた基準値と前記ロータの回転によって生じる誘起信号とを比較し、前記基準値と前記誘起信号との大小関係に基づいて前記ロータが回転したか否かを判定する回転判定手段とを備えて成ることを特徴とするモータ駆動装置が提供される。温度検出手段は、温度を検出する。回転判定手段は、前記温度検出手段で検出した温度に応じた基準値とロータの回転によって生じる誘起信号とを比較し、前記基準値と前記誘起信号との大小関係に基づいて前記ロータが回転したか否かを判定する。測定する温度は、潤滑油の温度であったり、大気の温度などなどがであることが望ましい、
【0013】
ここで、前記回転判定手段は、複数の温度に対応付けした基準値を記憶する記憶手段と、前記温度検出手段によって検出した温度に対応する基準値を前記記憶手段から選出する基準値選出手段とを備え、前記回転判定手段は、前記基準値選定手段によって選定した基準値と前記誘起信号を比較することによって前記ロータが回転したか否かを判定するように構成してもよい。
【0014】
また、第1パルス幅の通常駆動パルスと前記第1パルス幅よりも幅広の第2パルス幅の補正駆動パルスを選択的に前記モータに出力する駆動パルス出力手段を有し、前記駆動パルス出力手段は、前記ロータが回転したと前記回転判定手段が判定したときに前記通常駆動パルスを前記モータに出力し、前記ロータが回転しなかったと前記回転判定手段が判定したときには前記補正駆動パルスを前記モータに出力するように構成してもよい。
【0015】
また、本発明によれば、指針を回転駆動するステッピングモータと前記ステッピングモータを回転駆動するモータ駆動装置とを有する電子時計において、前記モータ駆動装置として、前記いずれかに記載のモータ駆動装置を用いたことを特徴とする電子時計が提供される。
【0016】
【発明の実施の形態】
以下、本発明の実施の形態について、図面を参照しながら詳細に説明する。
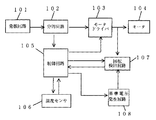
図1は、本発明の実施の形態に係るモータ駆動装置のブロック図であり、アナログ電子時計の指針等の駆動に適したステッピングモータ用モータ駆動装置の例を示している。
【0017】
図1において、モータ駆動装置は、所定の周波数の信号を生成する発振回路101、発振回路101からの信号を分周し、時間測定の基準となる時間信号を生成する分周回路102、モータ104に駆動パルスを供給するモータドライバ103、モータ駆動装置全体の制御を行う制御回路105、温度を検出する温度センサ106、モータ104のロータ(図示せず)の回転によって生じる誘起電圧(誘起信号)と基準電圧(基準値)を比較し、モータ104が回転したか否かを判定する回転検出回路107、基準電圧(基準値)を発生する基準電圧発生回路108を備えている。
【0018】
ここで、温度センサ106は温度検出手段を構成し、制御回路105、検出回路107及び基準電圧発生回路108は回転判定手段を構成している。また、制御回路105は温度センサ106によって検出した温度に対応する基準値を選定する基準値選定手段を構成し、基準電圧発生回路108は制御回路105で選定した基準値を出力する基準値出力手段を構成している。また、制御回路105及びモータドライバ103は駆動パルス出力手段を構成している。
図2は、本実施の形態に係るモータ制御装置の動作を示すフローチャートである。
【0019】
以下、図1及び図2を参照して、本実施の形態に係るモータ駆動装置の動作を詳細に説明する。
分周回路102は発振回路101からの信号を分周して時間信号をモータドライバ103に出力する。制御回路105はモータドライバ103に対して、予め定めた所定パルス幅の通常駆動パルスP1でモータ104を駆動するように指示を出し、モータドライバ103は前記時間信号を受信して、通常駆動パルスP1をモータ104に出力する(図2のステップS201)。モータ104のロータは、モータドライバ103からの通常駆動パルスP1に応答して回転動作を行う。
【0020】
温度センサ106は、制御回路105からの温度検出指令に応答して温度を検出し、制御回路105に検出温度を通知する。
制御回路105は、前記検出温度が所定温度以上の場合、基準電圧発生回路108に対して、予め定めた所定の第1の基準電圧(第1の基準値)Vcomp1を選定するように指示する。基準電圧発生回路108は、制御回路105からの前記指示に応答して、回転検出回路107に対して前記第1の基準電圧Vcomp1を出力する(ステップS202)。
【0021】
回転検出回路107は、前記ロータの回転動作によって発生する誘起電圧(誘起信号)Vrsと前記第1の基準電圧Vcomp1とを比較し(ステップS203)、誘起電圧Vrsが前記第1の基準電圧Vcomp1以上の場合にはモータ104が回転していると判定し、ステップS201からの経過時間が1秒経過した時にステップS201へ戻る(ステップS203)。
次の周期でも前記同様の動作が行われるが、直前に印加した通常駆動パルスP1とは180度位相が異なる(逆相の)通常駆動パルスP1がモータ104に供給される。前記動作を1秒周期で繰り返すことにより、モータ104は、交互に180度位相の異なる通常駆動パルスP1によって1秒周期で180度ずつ回転駆動され、電子時計の秒針等の指針が回転駆動される。
【0022】
ステップS203において、回転検出回路107は、誘起電圧Vrsが前記第1の基準電圧Vcomp1未満の場合にはモータ104が回転していないと判定し、制御回路105に対して、モータ104が非回転である旨の判定結果を通知する。
制御回路105は、回転検出回路107からの非回転である旨の通知を受けて、モータドライバ103に対して、通常駆動パルスP1よりもパルス幅が広く直前の通常駆動パルスP1と同相の補正駆動パルスP2を出力するように指示する。モータドライバ103は、制御回路105からの指示を受けて、モータ104を補正駆動パルスP2で回転駆動する(ステップS205)。これにより、モータ104は回転する。ステップS205の後に、ステップS201からの経過時間が1秒経過した時にステップS201へ戻る。以後、1秒周期で前記動作を繰り返すことにより、モータ104が通常駆動パルスP1では回転しない場合でも、補正駆動パルスP2によって回転させることができる。
【0023】
一方、ステップS202において、温度センサ106が検出した温度(潤滑油の温度)が所定温度未満の場合(例えば、−10℃未満の場合)、制御回路105は基準電圧発生回路108に対して、前記第1の基準電圧Vcomp1よりも低い値の,所定の第2の基準電圧(第2の基準値)Vcomp2を選定するように指示する。基準電圧発生回路108は、制御回路105からの前記指示に応答して、回転検出回路107に対して前記第2の基準電圧Vcomp2を出力する。
回転検出回路107は、前記ロータの回転動作によって発生する誘起電圧Vrsと前記第2の基準電圧Vcomp2とを比較し、誘起電圧Vrsが前記第2の基準電圧Vcomp2以上の場合にはモータ104が回転していると判定し、ステップS201からの経過時間が1秒経過した時にステップS201へ戻る(ステップS204)。
【0024】
次の周期でも前記同様の動作が行われるが、直前に印加した通常駆動パルスP1とは180度位相が異なる通常駆動パルスP1がモータ104に供給される。
前記動作を1秒周期で繰り返すことにより、モータ104は、交互に180度位相の異なる通常駆動パルスP1によって1秒周期で180度ずつ回転駆動され、電子時計の指針が回転駆動される。
【0025】
ステップS204において、回転検出回路107は、誘起電圧Vrsが前記第2の基準電圧Vcomp2未満の場合にはモータ104が回転していないと判定し、制御回路105に対して、モータ104が非回転である旨の判定結果を通知する。
制御回路105は、回転検出回路107からの非回転である旨の通知を受けて、モータドライバ103に対して、通常駆動パルスP1よりもパルス幅が広く直前の通常駆動パルスP1と同相の補正駆動パルスP2を出力するように指示する。モータドライバ103は、制御回路105からの指示を受けて、モータ104を補正駆動パルスP2で回転駆動する(ステップS205)。これにより、モータ104は回転する。ステップS205の後に、ステップS201からの経過時間が1秒経過した時にステップS201へ戻る。以後、1秒周期で前記動作を繰り返すことにより、モータ104が通常駆動パルスP1では回転しない場合でも、補正駆動パルスP2によって回転させることができる。
【0026】
以上述べたように、本発明の実施の形態に係るモータ駆動装置は、潤滑油によってロータが円滑に回転するようにしたモータを回転駆動するモータ駆動装置において、温度を検出する温度センサ106と、温度センサ106で検出した温度に応じた基準値と前記ロータの回転によって生じる誘起信号とを比較し、前記基準値と前記誘起信号との大小関係に基づいて前記ロータが回転したか否かを判定する回転判定手段(制御回路105、回転検出回路107、基準電圧発生回路108)とを備えている。
【0027】
したがって、温度による潤滑油の粘度変化の影響を受けずに正確にロータの回転・非回転を検出することが可能になる。また、温度による潤滑油の粘度変化の影響を受けずに正確にロータの回転を検出することが可能なため、不必要な消費電力の増加を回避することが可能になる。
また、温度による粘度変化に応じて適切な基準信号を選定することが可能になるため、より正確なモータの回転判定が可能になり、より確実に消費電力の不必要な増加を回避することが可能になる。
【0028】
尚、前記回転判定手段は、温度センサ106によって検出した温度に対応する基準値を選定する制御回路105と、制御回路105で選定した基準値を出力する基準電圧発生回路108を備え、基準電圧発生回路108から出力された基準値と前記誘起信号を比較することによって前記ロータが回転したか否かを判定するように構成してもよい。
【0029】
また、第1パルス幅の通常駆動パルスと前記第1パルス幅よりも幅広の第2パルス幅の補正駆動パルスを選択的に前記モータに出力する駆動パルス出力手段(制御回路105、モータドライバ103)を有し、前記駆動パルス出力手段は、前記ロータが回転したと前記回転判定手段が判定したときに、直前に出力した通常駆動パルスと同相の通常駆動パルスをモータ104に出力し、前記ロータが回転しなかったと前記回転判定手段が判定したときには直前に出力した通常駆動パルスと逆位相の補正駆動パルスをモータ104に出力するように構成してもよい。
また、本実施の形態は、電子時計に使用するステッピングモータ駆動装置の例で説明したが、他の電子機器用のモータ駆動装置としても適用可能である。
【0030】
また、本発明の実施の形態によれば、指針を回転駆動するステッピングモータと前記ステッピングモータを回転駆動するモータ駆動装置とを有する電子時計において、前記モータ駆動装置として、前記いずれかのモータ駆動装置を用いたことを特徴とする電子時計が提供される。したがって、時針や分針等の指針を回転駆動するためのステッピングモータの回転判定を、温度による潤滑油の粘度変化の影響に対してより正確に行うことが可能になるため、より確実に消費電力の不必要な増加を抑制することが可能になる。
【0031】
【発明の効果】
本発明のモータ駆動装置によれば、温度による潤滑油の粘度変化の影響を受けずに正確にロータの回転を検出できる。また、温度による潤滑油の粘度変化の影響を受けずに正確にロータの回転を検出することによって、不必要な消費電力の増加を回避することが可能になる。
また、本発明の電子時計によれば、指針を回転駆動するためのステッピングモータの回転判定を、温度による潤滑油の粘度変化の影響に対してより正確に行うことが可能になるため、より確実に消費電力の不必要な増加を回避することが可能になる。
【図面の簡単な説明】
【図1】本発明の実施の形態に係るモータ駆動装置のブロック図である。
【図2】本発明の実施の形態に係るモータ駆動装置の動作を示すフローチャートである。
【図3】従来のモータ駆動装置の動作を説明するための図である。
【符号の説明】
101・・・発振回路
102・・・分周回路
103・・・駆動パルス出力手段を構成するモータドライバ
104・・・モータ
105・・・回転判定手段、基準値選定手段及び駆動パルス出力手段を構成する制御回路
106・・・温度検出手段を構成する温度センサ
107・・・回転判定手段を構成する回転検出回路
108・・・回転判定手段及び基準値出力手段を構成する基準電圧発生回路
【発明の属する技術分野】
本発明は、ステッピングモータ等を回転駆動するためのモータ駆動装置及び前記モータ駆動装置を用いた電子時計に関する。
【0002】
【従来の技術】
従来から、アナログ電子時計において、ロータ収容用貫通孔及びロータの停止位置を決める位置決め部を有するステータと、前記ロータ収容用貫通孔内に配設されたロータと、コイルとを有し、前記コイルに交番信号を供給して前記ステータに磁束を発生させることによって前記ロータを回転させると共に、前記位置決め部に対応する位置に前記ロータを停止するようにしたステッピングモータが使用されている。
【0003】
ステッピングモータ等を回転駆動するためのモータ駆動装置としては、例えば、特許文献1に示すような装置がある。
即ち、特許文献1記載のモータ駆動装置においては、通常の回転駆動時には、所定パルス幅の通常駆動パルスP1でモータを回転駆動する。ロータの回転によって発生する誘起電圧を駆動コイルに接続した回転検出用抵抗にて検出し、前記誘起記電圧と所定の基準電圧とをコンパレータによって比較する。前記誘起電圧が前記基準電圧より小さいときはロータが回転していないと判定し、通常駆動パルスP1よりもパルス幅の広い補正駆動パルスP2を用いてモータを回転駆動する。
【0004】
これにより、通常時には幅狭の通常駆動パルスP1で駆動すると共に通常駆動パルスP1では回転しなかったとき(非回転時)にのみ幅広の補正駆動パルスP2で駆動することにより、確実にモータを回転駆動することが可能になる。また、常に幅広の補正駆動パルスP2により回転駆動する場合に比べて、少ない消費電力でモータを回転させることが可能になる。
【0005】
ところで、モータにはロータの回転を円滑にするために、前記ロータの支持部分に潤滑油が使用されている。特許文献1記載の発明では、低温下での潤滑油の粘度上昇で負荷が増大したとき、通常駆動パルスP1でロータが回転した場合でも、回転速度が減少して誘起電圧が小さくなり、非回転と判定することになるため、常時、補正駆動パルスP2を印加してしまう恐れがある。このため、モータは回転しているにもかかわらず、モータには大電流が流れ、消費電力が大きくなるという問題がある。
【0006】
図3は、モータの回転・非回転に応じて、通常駆動パルスP1や補正駆動パルスP2によって回転駆動する際の動作を説明するための表である。
図3に示すように、潤滑油は、常温時は粘度が小さく、低温時(例えば、0℃〜−10℃以下)では粘度が大きくなる。
したがって、常温時には、モータの回転速度が大きいため、誘起電圧Vrsとして大きな信号が得られる。誘起電圧Vrsと所定の基準電圧Vcompの大小関係を比較して、誘起電圧Vrsが基準電圧Vcomp以上の時は、モータが回転したと判定して補正駆動パルスは出力しない。この場合、次に供給する駆動パルスは、直前に供給した通常駆動パルスP1とは逆相の通常駆動パルスであり、180度位相の異なる通常駆動パルスP1を交互に供給することによって、ロータを180度ずつ連続的に回転させる。
【0007】
一方、誘起電圧Vrsが基準電圧Vcomp未満の時は、モータが回転していないと判定して直前の通常駆動パルスP1と同相の補正駆動パルスP2を出力することにより、モータを確実に回転させる。尚、この場合、次に供給する駆動パルスは、直前に供給した通常駆動パルスP1とは逆相の通常駆動パルスP1である。
低温時にも前記同様にしてモータの回転・非回転を検出して、その結果に応じた駆動パルスを出力する。しかしながら、低温時には、モータの回転速度は小さいため、誘起電圧Vrsが小さくなる。したがって、斜線で示す領域のように、本来であれば回転と判定すべきところを、誘起電圧Vrsが基準電圧Vcomp未満になるため非回転と誤判定してしまい、非回転であったロータを確実に回転させるために、次の駆動パルスとして、前回供給した通常駆動パルスP1と同相の補正駆動パルスP2をモータに出力してしまう。実際にはロータは回転してしまっているため、この補正駆動パルスP2は回転動作には何ら寄与せず、全く無駄な消費電力となる。
【0008】
この問題を解決する方法として、特許文献2に記載されているように、誘起電圧検出用抵抗Rsを複数用意しておき、複数の基準電圧Vcompを設定する方法が考えられる。
また、特許文献3に記載されているように、温度センサを搭載し、温度変化に応じて駆動電圧波形を変化させるようにすることも考えられる。
【0009】
【特許文献1】
特公昭63−18148号公報
【特許文献2】
特公昭61−15383号公報
【特許文献3】
実開昭55−66号公報
【0010】
【発明が解決しようとする課題】
しかしながら、特許文献2の方法を採用するにしても、温度による潤滑油の粘度変化の影響に対応した適切な基準電圧を複数の中から選定することは困難という問題がある。また、特許文献3の方法では、モータが回転した際に、これを非回転と誤検出することによる消費電力の増大を回避することはできないという問題がある。
したがって、温度による潤滑油の粘度変化によってロータの回転検出が不正確になるという問題がある。
また、温度による潤滑油の粘度変化によりロータの回転検出が不正確になることによって、消費電力が不必要に増加するという問題がある。
【0011】
本発明は、かかる問題点に鑑みて成されたもので、温度による潤滑油の粘度変化の影響を受けずに正確にロータの回転を検出できるようにすることを課題としている。
また、本発明は、かかる問題点に鑑みて成されたもので、温度による潤滑油の粘度変化の影響を受けずに正確にロータの回転を検出することによって、不必要な消費電力の増加を回避することを課題としている。
【0012】
【課題を解決するための手段】
本発明によれば、潤滑油によってロータが円滑に回転するようにしたモータを回転駆動するモータ駆動装置において、温度を検出する温度検出手段と、前記温度検出手段で検出した温度に応じた基準値と前記ロータの回転によって生じる誘起信号とを比較し、前記基準値と前記誘起信号との大小関係に基づいて前記ロータが回転したか否かを判定する回転判定手段とを備えて成ることを特徴とするモータ駆動装置が提供される。温度検出手段は、温度を検出する。回転判定手段は、前記温度検出手段で検出した温度に応じた基準値とロータの回転によって生じる誘起信号とを比較し、前記基準値と前記誘起信号との大小関係に基づいて前記ロータが回転したか否かを判定する。測定する温度は、潤滑油の温度であったり、大気の温度などなどがであることが望ましい、
【0013】
ここで、前記回転判定手段は、複数の温度に対応付けした基準値を記憶する記憶手段と、前記温度検出手段によって検出した温度に対応する基準値を前記記憶手段から選出する基準値選出手段とを備え、前記回転判定手段は、前記基準値選定手段によって選定した基準値と前記誘起信号を比較することによって前記ロータが回転したか否かを判定するように構成してもよい。
【0014】
また、第1パルス幅の通常駆動パルスと前記第1パルス幅よりも幅広の第2パルス幅の補正駆動パルスを選択的に前記モータに出力する駆動パルス出力手段を有し、前記駆動パルス出力手段は、前記ロータが回転したと前記回転判定手段が判定したときに前記通常駆動パルスを前記モータに出力し、前記ロータが回転しなかったと前記回転判定手段が判定したときには前記補正駆動パルスを前記モータに出力するように構成してもよい。
【0015】
また、本発明によれば、指針を回転駆動するステッピングモータと前記ステッピングモータを回転駆動するモータ駆動装置とを有する電子時計において、前記モータ駆動装置として、前記いずれかに記載のモータ駆動装置を用いたことを特徴とする電子時計が提供される。
【0016】
【発明の実施の形態】
以下、本発明の実施の形態について、図面を参照しながら詳細に説明する。
図1は、本発明の実施の形態に係るモータ駆動装置のブロック図であり、アナログ電子時計の指針等の駆動に適したステッピングモータ用モータ駆動装置の例を示している。
【0017】
図1において、モータ駆動装置は、所定の周波数の信号を生成する発振回路101、発振回路101からの信号を分周し、時間測定の基準となる時間信号を生成する分周回路102、モータ104に駆動パルスを供給するモータドライバ103、モータ駆動装置全体の制御を行う制御回路105、温度を検出する温度センサ106、モータ104のロータ(図示せず)の回転によって生じる誘起電圧(誘起信号)と基準電圧(基準値)を比較し、モータ104が回転したか否かを判定する回転検出回路107、基準電圧(基準値)を発生する基準電圧発生回路108を備えている。
【0018】
ここで、温度センサ106は温度検出手段を構成し、制御回路105、検出回路107及び基準電圧発生回路108は回転判定手段を構成している。また、制御回路105は温度センサ106によって検出した温度に対応する基準値を選定する基準値選定手段を構成し、基準電圧発生回路108は制御回路105で選定した基準値を出力する基準値出力手段を構成している。また、制御回路105及びモータドライバ103は駆動パルス出力手段を構成している。
図2は、本実施の形態に係るモータ制御装置の動作を示すフローチャートである。
【0019】
以下、図1及び図2を参照して、本実施の形態に係るモータ駆動装置の動作を詳細に説明する。
分周回路102は発振回路101からの信号を分周して時間信号をモータドライバ103に出力する。制御回路105はモータドライバ103に対して、予め定めた所定パルス幅の通常駆動パルスP1でモータ104を駆動するように指示を出し、モータドライバ103は前記時間信号を受信して、通常駆動パルスP1をモータ104に出力する(図2のステップS201)。モータ104のロータは、モータドライバ103からの通常駆動パルスP1に応答して回転動作を行う。
【0020】
温度センサ106は、制御回路105からの温度検出指令に応答して温度を検出し、制御回路105に検出温度を通知する。
制御回路105は、前記検出温度が所定温度以上の場合、基準電圧発生回路108に対して、予め定めた所定の第1の基準電圧(第1の基準値)Vcomp1を選定するように指示する。基準電圧発生回路108は、制御回路105からの前記指示に応答して、回転検出回路107に対して前記第1の基準電圧Vcomp1を出力する(ステップS202)。
【0021】
回転検出回路107は、前記ロータの回転動作によって発生する誘起電圧(誘起信号)Vrsと前記第1の基準電圧Vcomp1とを比較し(ステップS203)、誘起電圧Vrsが前記第1の基準電圧Vcomp1以上の場合にはモータ104が回転していると判定し、ステップS201からの経過時間が1秒経過した時にステップS201へ戻る(ステップS203)。
次の周期でも前記同様の動作が行われるが、直前に印加した通常駆動パルスP1とは180度位相が異なる(逆相の)通常駆動パルスP1がモータ104に供給される。前記動作を1秒周期で繰り返すことにより、モータ104は、交互に180度位相の異なる通常駆動パルスP1によって1秒周期で180度ずつ回転駆動され、電子時計の秒針等の指針が回転駆動される。
【0022】
ステップS203において、回転検出回路107は、誘起電圧Vrsが前記第1の基準電圧Vcomp1未満の場合にはモータ104が回転していないと判定し、制御回路105に対して、モータ104が非回転である旨の判定結果を通知する。
制御回路105は、回転検出回路107からの非回転である旨の通知を受けて、モータドライバ103に対して、通常駆動パルスP1よりもパルス幅が広く直前の通常駆動パルスP1と同相の補正駆動パルスP2を出力するように指示する。モータドライバ103は、制御回路105からの指示を受けて、モータ104を補正駆動パルスP2で回転駆動する(ステップS205)。これにより、モータ104は回転する。ステップS205の後に、ステップS201からの経過時間が1秒経過した時にステップS201へ戻る。以後、1秒周期で前記動作を繰り返すことにより、モータ104が通常駆動パルスP1では回転しない場合でも、補正駆動パルスP2によって回転させることができる。
【0023】
一方、ステップS202において、温度センサ106が検出した温度(潤滑油の温度)が所定温度未満の場合(例えば、−10℃未満の場合)、制御回路105は基準電圧発生回路108に対して、前記第1の基準電圧Vcomp1よりも低い値の,所定の第2の基準電圧(第2の基準値)Vcomp2を選定するように指示する。基準電圧発生回路108は、制御回路105からの前記指示に応答して、回転検出回路107に対して前記第2の基準電圧Vcomp2を出力する。
回転検出回路107は、前記ロータの回転動作によって発生する誘起電圧Vrsと前記第2の基準電圧Vcomp2とを比較し、誘起電圧Vrsが前記第2の基準電圧Vcomp2以上の場合にはモータ104が回転していると判定し、ステップS201からの経過時間が1秒経過した時にステップS201へ戻る(ステップS204)。
【0024】
次の周期でも前記同様の動作が行われるが、直前に印加した通常駆動パルスP1とは180度位相が異なる通常駆動パルスP1がモータ104に供給される。
前記動作を1秒周期で繰り返すことにより、モータ104は、交互に180度位相の異なる通常駆動パルスP1によって1秒周期で180度ずつ回転駆動され、電子時計の指針が回転駆動される。
【0025】
ステップS204において、回転検出回路107は、誘起電圧Vrsが前記第2の基準電圧Vcomp2未満の場合にはモータ104が回転していないと判定し、制御回路105に対して、モータ104が非回転である旨の判定結果を通知する。
制御回路105は、回転検出回路107からの非回転である旨の通知を受けて、モータドライバ103に対して、通常駆動パルスP1よりもパルス幅が広く直前の通常駆動パルスP1と同相の補正駆動パルスP2を出力するように指示する。モータドライバ103は、制御回路105からの指示を受けて、モータ104を補正駆動パルスP2で回転駆動する(ステップS205)。これにより、モータ104は回転する。ステップS205の後に、ステップS201からの経過時間が1秒経過した時にステップS201へ戻る。以後、1秒周期で前記動作を繰り返すことにより、モータ104が通常駆動パルスP1では回転しない場合でも、補正駆動パルスP2によって回転させることができる。
【0026】
以上述べたように、本発明の実施の形態に係るモータ駆動装置は、潤滑油によってロータが円滑に回転するようにしたモータを回転駆動するモータ駆動装置において、温度を検出する温度センサ106と、温度センサ106で検出した温度に応じた基準値と前記ロータの回転によって生じる誘起信号とを比較し、前記基準値と前記誘起信号との大小関係に基づいて前記ロータが回転したか否かを判定する回転判定手段(制御回路105、回転検出回路107、基準電圧発生回路108)とを備えている。
【0027】
したがって、温度による潤滑油の粘度変化の影響を受けずに正確にロータの回転・非回転を検出することが可能になる。また、温度による潤滑油の粘度変化の影響を受けずに正確にロータの回転を検出することが可能なため、不必要な消費電力の増加を回避することが可能になる。
また、温度による粘度変化に応じて適切な基準信号を選定することが可能になるため、より正確なモータの回転判定が可能になり、より確実に消費電力の不必要な増加を回避することが可能になる。
【0028】
尚、前記回転判定手段は、温度センサ106によって検出した温度に対応する基準値を選定する制御回路105と、制御回路105で選定した基準値を出力する基準電圧発生回路108を備え、基準電圧発生回路108から出力された基準値と前記誘起信号を比較することによって前記ロータが回転したか否かを判定するように構成してもよい。
【0029】
また、第1パルス幅の通常駆動パルスと前記第1パルス幅よりも幅広の第2パルス幅の補正駆動パルスを選択的に前記モータに出力する駆動パルス出力手段(制御回路105、モータドライバ103)を有し、前記駆動パルス出力手段は、前記ロータが回転したと前記回転判定手段が判定したときに、直前に出力した通常駆動パルスと同相の通常駆動パルスをモータ104に出力し、前記ロータが回転しなかったと前記回転判定手段が判定したときには直前に出力した通常駆動パルスと逆位相の補正駆動パルスをモータ104に出力するように構成してもよい。
また、本実施の形態は、電子時計に使用するステッピングモータ駆動装置の例で説明したが、他の電子機器用のモータ駆動装置としても適用可能である。
【0030】
また、本発明の実施の形態によれば、指針を回転駆動するステッピングモータと前記ステッピングモータを回転駆動するモータ駆動装置とを有する電子時計において、前記モータ駆動装置として、前記いずれかのモータ駆動装置を用いたことを特徴とする電子時計が提供される。したがって、時針や分針等の指針を回転駆動するためのステッピングモータの回転判定を、温度による潤滑油の粘度変化の影響に対してより正確に行うことが可能になるため、より確実に消費電力の不必要な増加を抑制することが可能になる。
【0031】
【発明の効果】
本発明のモータ駆動装置によれば、温度による潤滑油の粘度変化の影響を受けずに正確にロータの回転を検出できる。また、温度による潤滑油の粘度変化の影響を受けずに正確にロータの回転を検出することによって、不必要な消費電力の増加を回避することが可能になる。
また、本発明の電子時計によれば、指針を回転駆動するためのステッピングモータの回転判定を、温度による潤滑油の粘度変化の影響に対してより正確に行うことが可能になるため、より確実に消費電力の不必要な増加を回避することが可能になる。
【図面の簡単な説明】
【図1】本発明の実施の形態に係るモータ駆動装置のブロック図である。
【図2】本発明の実施の形態に係るモータ駆動装置の動作を示すフローチャートである。
【図3】従来のモータ駆動装置の動作を説明するための図である。
【符号の説明】
101・・・発振回路
102・・・分周回路
103・・・駆動パルス出力手段を構成するモータドライバ
104・・・モータ
105・・・回転判定手段、基準値選定手段及び駆動パルス出力手段を構成する制御回路
106・・・温度検出手段を構成する温度センサ
107・・・回転判定手段を構成する回転検出回路
108・・・回転判定手段及び基準値出力手段を構成する基準電圧発生回路
Claims (4)
- 潤滑油によってロータが円滑に回転するようにしたモータを回転駆動するモータ駆動装置において、
温度を検出する温度検出手段と、
前記温度検出手段で検出した温度に応じた基準値と前記ロータの回転によって生じる誘起信号とを比較し、前記基準値と前記誘起信号との大小関係に基づいて前記ロータが回転したか否かを判定する回転判定手段とを備えて成ることを特徴とするモータ駆動装置。 - 前記回転判定手段は、前記温度検出手段によって検出した温度に対応する基準値を選定する基準値選定手段と、前記基準値選定手段で選定した基準値を出力する基準値出力手段を備え、前記基準値出力手段から出力された基準値と前記誘起信号を比較することによって前記ロータが回転したか否かを判定することを特徴とする請求項1記載のモータ駆動装置。
- 第1パルス幅の通常駆動パルスと前記第1パルス幅よりも幅広の第2パルス幅の補正駆動パルスを選択的に前記モータに出力する駆動パルス出力手段を有し、
前記駆動パルス出力手段は、前記ロータが回転したと前記回転判定手段が判定したときに前記通常駆動パルスを前記モータに出力し、前記ロータが回転しなかったと前記回転判定手段が判定したときには前記補正駆動パルスを前記モータに出力することを特徴とする請求項1又は2記載のモータ駆動装置。 - 指針を回転駆動するステッピングモータと前記ステッピングモータを回転駆動するモータ駆動装置とを有する電子時計において、前記モータ駆動装置として、請求項1乃至3のいずれか一に記載のモータ駆動装置を用いたことを特徴とする電子時計。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002341143A JP2004177172A (ja) | 2002-11-25 | 2002-11-25 | モータ駆動装置及び電子時計 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002341143A JP2004177172A (ja) | 2002-11-25 | 2002-11-25 | モータ駆動装置及び電子時計 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004177172A true JP2004177172A (ja) | 2004-06-24 |
Family
ID=32703596
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002341143A Pending JP2004177172A (ja) | 2002-11-25 | 2002-11-25 | モータ駆動装置及び電子時計 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004177172A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103499918A (zh) * | 2013-09-22 | 2014-01-08 | 天津市太阳精仪科技有限公司 | 一种智能型指针式时间累加计时器 |
| JP2019219181A (ja) * | 2018-06-15 | 2019-12-26 | シチズン時計株式会社 | 電子時計 |
-
2002
- 2002-11-25 JP JP2002341143A patent/JP2004177172A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103499918A (zh) * | 2013-09-22 | 2014-01-08 | 天津市太阳精仪科技有限公司 | 一种智能型指针式时间累加计时器 |
| JP2019219181A (ja) * | 2018-06-15 | 2019-12-26 | シチズン時計株式会社 | 電子時計 |
| JP7045940B2 (ja) | 2018-06-15 | 2022-04-01 | シチズン時計株式会社 | 電子時計 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4863871B2 (ja) | アナログ電子時計及びモータ制御回路 | |
| KR101748188B1 (ko) | 스텝 로스 조건을 검출하기 위한 방법 | |
| US7096134B2 (en) | Method and apparatus for measuring the rotational speed of a fan | |
| CN101753084B (zh) | 步进电机控制器和模拟电子表 | |
| JP2011203136A (ja) | ステッピングモータ制御回路及びアナログ電子時計 | |
| JP6162513B2 (ja) | ステッピングモータ制御回路、ムーブメント及びアナログ電子時計 | |
| US8223594B2 (en) | Chronograph timepiece | |
| JP5363269B2 (ja) | ステッピングモータ制御回路及びアナログ電子時計 | |
| JP5665383B2 (ja) | モータ制御装置及び制御方法 | |
| JP2004177172A (ja) | モータ駆動装置及び電子時計 | |
| JP2010220408A (ja) | ステッピングモータ制御回路及びアナログ電子時計 | |
| JPH0956191A (ja) | ブラシレスモータの速度検出装置 | |
| JP2010043949A (ja) | ステッピングモータ制御回路及びアナログ電子時計 | |
| JP2010256137A (ja) | ステッピングモータ制御回路及びアナログ電子時計 | |
| JP2009276223A (ja) | ステッピングモータ駆動回路及びアナログ電子時計 | |
| JP2010164461A (ja) | ステッピングモータ制御回路及びアナログ電子時計 | |
| JP2010178477A (ja) | ドライバ回路 | |
| JP2003344565A (ja) | 電子時計 | |
| JP2972034B2 (ja) | ステッピングモータ用負荷トルク測定装置 | |
| JP4995591B2 (ja) | ステッピングモータ駆動回路及びアナログ電子時計 | |
| JP3815238B2 (ja) | モータの回転制御方法 | |
| JP4922008B2 (ja) | ステッピングモータ駆動回路及びアナログ電子時計 | |
| JP2011064600A (ja) | ステッピングモータ制御回路及びアナログ電子時計 | |
| JP4137539B2 (ja) | ステッピングモータ駆動装置及び電子時計 | |
| TWI277284B (en) | Method and apparatus for driving a brushless DC motor |