JP2004182196A - 車両用舵角制御装置 - Google Patents
車両用舵角制御装置 Download PDFInfo
- Publication number
- JP2004182196A JP2004182196A JP2002354928A JP2002354928A JP2004182196A JP 2004182196 A JP2004182196 A JP 2004182196A JP 2002354928 A JP2002354928 A JP 2002354928A JP 2002354928 A JP2002354928 A JP 2002354928A JP 2004182196 A JP2004182196 A JP 2004182196A
- Authority
- JP
- Japan
- Prior art keywords
- steering angle
- rear wheel
- target
- wheel
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Landscapes
- Steering-Linkage Mechanisms And Four-Wheel Steering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
【解決手段】ハンドル操舵角を検出するハンドル操舵角検出手段と、車速を検出する車速検出手段と、前輪に補助舵角を付与する前輪補助舵角付与手段と、後輪に補助舵角を付与する後輪補助舵角付与手段と、検出されたハンドル操舵角及び車速に基づいて車両モデルから前輪補助舵角及び後輪補助舵角を算出し、前記前輪補助舵角付与手段及び前記後輪補助舵角付与手段に指令信号を出力する前後輪補助舵角制御手段と、を備えた車両用舵角制御装置において、前記前後輪補助舵角制御手段を、後輪補助舵角が制限上限に達したかどうかを判断する制限上限判断部を有し、後輪補助舵角が制限上限に達したと判断したときは、前記前輪補助舵角のハンドル操舵角に対する変化量を制限上限に達する前よりも制限する手段とした。
【選択図】 図4
Description
【発明の属する技術分野】
本発明は、前輪への操舵入力時等に前輪及び後輪に補助舵角を与える前後輪操舵制御装置に関する。
【0002】
【従来の技術】
従来から、例えば特開平5−105102号公報に開示された前後輪共に補助操舵を行う技術が提案されている。この従来技術では、検出されたハンドル操舵角に基づくフィードフォワード項と検出されたヨーレイトに基づくフィードバック項との加算値により前後輪に補助舵角を与えるよう構成されている。
【0003】
【発明が解決しようとする課題】
しかしながら、上述の前後輪操舵制御装置にあっては、通常は前輪操舵と後輪操舵を用いることで、目標値としてヨーレイトと横速度を取ることが可能であるが、後輪操舵角が制御上限に達した場合は、制御可能な舵角が前輪のみとなるため、前輪操舵角目標値が過剰なものとなって運転者に違和感を与える可能性がある。
【0004】
本発明は、上述の課題に鑑み、前輪補助舵角付与手段及び後輪補助舵角付与手段を備えた車両用舵角制御装置において、後輪操舵角が制御上限に達したとしても、運転者に違和感を与えることなく車両の挙動を安定に制御可能な車両用舵角制御装置を提供することを目的とする。
【0005】
【課題を解決するための手段】
上記目的を達成するため、ハンドル操舵角を検出するハンドル操舵角検出手段と、車速を検出する車速検出手段と、前輪に補助舵角を付与する前輪補助舵角付与手段と、後輪に補助舵角を付与する後輪補助舵角付与手段と、検出されたハンドル操舵角及び車速に基づいて車両モデルから前輪補助舵角及び後輪補助舵角を算出し、前記前輪補助舵角付与手段及び前記後輪補助舵角付与手段に指令信号を出力する前後輪補助舵角制御手段と、を備えた車両用舵角制御装置において、前記前後輪補助舵角制御手段を、後輪補助舵角が制限上限に達したかどうかを判断する制限上限判断部を有し、後輪補助舵角が制限上限に達したと判断したときは、前記前輪補助舵角のハンドル操舵角に対する変化量を制限上限に達する前よりも制限する手段としたことで、上記課題を解決するに至った。
【0006】
【発明の作用】
本願発明にあっては、後輪補助舵角が制限上限に達したときは、前輪補助舵角を小さくすることで、車両スピン方向のヨーモーメントを抑制し、車両スリップアングルの適正な制御が達成され、運転者に違和感を与えることなく安定した操舵制御を達成することができる。
【0007】
【発明の実施の形態】
以下、本発明における車両用操舵制御装置の実施形態について実施例をもとに説明するが、本発明は実施例に限定されるものではない。
【0008】
(第1実施例)
図1は本発明の第1実施例における基本構成を示す全体システム図である。
実施例の車両用操舵制御装置が適用される車両の前輪1L,1Rには、ハンドル2への操舵入力に基づき左右の前輪操舵機構3L,3Rを介して前輪1L,1Rを操舵するステアリングユニット4が設けられている。更に、前輪操舵アクチュエータ37としてステアリングユニット4のラックチューブ(車体5に弾性体6を介して支持)をストロークさせることで前輪1L,1Rに補助舵角を与える前輪側油圧シリンダ7が設けられている。また、後輪操舵アクチュエータ38として、後輪8L,8Rには、左右の後輪操舵機構9L,9Rを介して後輪8L,8Rに補助舵角を与える後輪側油圧シリンダ10が設けられている。
【0009】
前輪側油圧シリンダ7及び後輪側油圧シリンダ10は、共通の油圧源ユニット11を油圧源としている。この油圧源ユニット11から前輪側フェールセーフバルブ12及び前輪側サーボバルブ13を介して制御圧を与えることで前輪側油圧シリンダ7が駆動する。また、油圧源ユニット11から後輪側フェールセーフバルブ14及び後輪側サーボバルブ15を介して制御圧を与えることで後輪側油圧シリンダ10が駆動する。尚、油圧源ユニット11には、エンジン16により駆動される油圧ポンプ11a,アンロードバルブ11b,圧力スイッチ11c,アキュムレータ11d,リザーバ11eから構成され、一定圧の作動油を供給する。
【0010】
前輪側フェールセーフバルブ12及び後輪側フェールセーフバルブ14は、操舵制御コントローラ30の指令に基づいてON/OFFの2位置が切り換えられる。また、前輪側サーボバルブ13及び後輪側サーボバルブ15は、操舵制御コントローラ30からサーボアンプ18,19を介した指令に基づいて右操舵,保持,左操舵の3位置が切り換え制御される。
【0011】
操舵制御コントローラ30には、車両の実車速Vを検出する車速センサ20(車速検出手段に相当),パルスエンコーダ等を用いて運転者の操舵角度θを検出する操舵角センサ21(ハンドル操舵角検出手段に相当),エンジン回転数センサ23,前輪側変位センサ24,後輪側変位センサ25,ニュートラルスイッチ26,クラッチスイッチ27,ストップランプスイッチ28からの検出信号が入力される。
【0012】
図2は操舵制御コントローラ30の構成を表すブロック図である。操舵制御コントローラ30は、目標値生成部31、目標出力値生成部32、前輪操舵コントローラ34及び後輪操舵コントローラ35から構成されている。
【0013】
目標値生成部31は、図3の目標値生成部31の構成を表すブロック図に示すように、車両モデル演算部311と目標値演算部312から構成されている。
車両モデル演算部311は、操舵角度θと車体速Vから2輪モデルを用いて車両パラメータを演算する。車両パラメータの演算については後で詳細に説明する。
目標値演算部312は、操舵角度θ、車体速V及び車両パラメータから、車両の目標ヨーレイトψ’*と目標横速度V*yを決定する。尚、後輪操舵角度が最大値に到達したときは、目標横速度V*yのみ出力する。
【0014】
目標出力値生成部32は、図4の目標出力値生成部32の構成を表すブロック図に示すように、目標後輪舵角演算部321,目標前輪舵角演算部322から構成されている。
【0015】
目標後輪舵角演算部321は、車両の目標ヨーレイトψ’*と目標横速度V*yから目標後輪舵角δ*を決定する。後輪舵角飽和時には、後輪舵角最大値δmaxを出力する。
目標前輪舵角演算部322は、車両の目標ヨーレイトψ’*,目標横速度V*yから目標前輪舵角θ*を決定する。後輪舵角飽和時には、後輪舵角最大値δmax及び目標横速度から目標前輪舵角θ*を出力する。
【0016】
前輪操舵コントローラ34は、前輪の実舵角が目標前輪舵角θ*と一致するように前輪操舵アクチュエータ37を制御する。
【0017】
後輪操舵コントローラ35は、後輪の実舵角が補正後目標前輪舵角δ*と一致するように後輪操舵アクチュエータ38を制御する。
【0018】
〔車両モデル演算部311における車両モデル演算〕
車両モデル演算部311は、以下に示す車両モデルから、車両パラメータを演算する。
一般に、2輪モデルを仮定すると、車両のヨーレイトと横速度は、下記式1で表せる。
(式1)

【0019】
状態方程式より前輪操舵、後輪操舵に対するヨーレイト、横速度の伝達関数を求めると、下記式(3)〜式(7)で表される。
(式3)
(式7)
定常状態で考えると微分演算子sは無視できるので、式(3)〜式(7)より下記式(3)’〜式(6)’の関係が導出できる。
(式3)’
〔目標値演算部312における目標値演算〕
前輪操舵のみの横速度定常値V*y0とヨーレイト定常値ψ’0 *は下記式(8),(9)で表される。
式(8)
後輪操舵を含む4輪操舵時の目標横速度V*y0と目標ヨーレイトψ’0 *は、前輪操舵のみの定常値に対して所定のゲインを乗じた下記式(10),(11)に表される。
式(10)
【0023】
〔目標出力値生成部32における目標操舵角演算〕
(目標後輪舵角が飽和していない時)
目標ヨーレイト,目標横速度から目標前輪舵角θ’*及び目標後輪舵角δ*を算出する。
(式12)
ここで、目標横速度V*y0,ψ’0 *,A,B,C,Dは既知であり、目標前輪舵角θ*’と目標後輪舵角δ*が未知である。式(10),式(11),式(14)から目標前輪舵角は下記式(15)で表される。
(式15)
(式16)
(目標後輪舵角が飽和している時)
目標横速度と後輪操舵角最大値から、目標前輪舵角θ*’と後輪舵角飽和時の目標ヨーレイトψ’0 *’を算出する。
(式17)
ここで、目標横速度V*y0,δ*(=δmax *),A,B,C,Dは既知であり、目標前輪舵角θ*’と目標ヨーレイトψ’*’が未知である。式(10),式(11),式(17),式(18)から目標前輪舵角は下記式(19)で表される。
(式19)
(式20)
図5は目標出力生成部の制御内容を表すフローチャートである。
ステップS1では、後輪舵角の絶対値δが後輪飽和舵角δmax以下かどうかを判断し、δmax以下の時はステップS2へ進み、それ以外はステップS4へ進む。
ステップS2では、目標ヨーレイトψ’*及び目標横速度V*y0を演算する。
ステップS3では、目標前輪舵角演算θ*’及び目標後輪舵角δ*を演算する。
ステップS4では、目標横速度V*y0を演算する。
ステップS5では、目標横速度V*y0及び後輪飽和舵角δmaxから目標前輪舵角θ*’を演算する。
ステップS6では、操舵制御を実行する。
【0028】
以上説明したように、本実施の形態では、後輪舵角制御量が飽和した場合、目標横速度及び後輪飽和舵角を用いて目標前輪操舵量を演算することで、後輪舵角制御量が飽和した場合でも、前輪補助舵角のハンドル操舵角に対する変化量を小さくすることで、車両スピン方向のモーメントを抑制し、車両スリップアングルの適正な制御が達成され、運転者に違和感を与えることがない。
【0029】
図8〜図11は上記構成に基づいたシミュレーション結果を表す図、図12〜図15は従来技術に基づいたシミュレーション結果を表す図である。以下、本願発明と従来技術を比較しながら説明する。
【0030】
(従来技術)
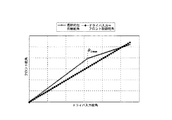
車速120km/h、操舵角を図12の◆に示すように与えた場合、制御された最終的な前輪操舵角は△に示すように与えられる。図13に示すように、ドライバ入力操舵角がθδmaxになると、後輪操舵角が飽和する。よって、図14に示すように、目標ヨーレイトと発生ヨーレイトがθδmaxを越えると乖離し始める。また、図15に示すように、ドライバ入力操舵角がθδmaxを越えると、目標横速度に対して、目標以上の横速度が発生していることが分かる。
【0031】
(本願発明)
車速120km/h、操舵角を図8の◆に示すように与えた場合、制御された最終的な前輪操舵角は*で示すように与えられる。図9に示すように、ドライバ入力操舵角がθδmaxになると、後輪操舵角が飽和する。このとき、本願発明では、目標横速度及び後輪飽和舵角δmaxを用いて目標ヨーレイトを算出するため、目標ヨーレイトと発生ヨーレイトが一致するとともに、通常よりも小さな目標ヨーレイトが算出される。また、図11に示すように、目標横速度と発生横速度が一致し、更に目標ヨーレイトが小さいことから前輪補助舵角も小さく設定され、発生横速度も小さくなっていることが分かる。
【0032】
(その他の実施例)
第1実施例では、後輪舵角が飽和した際、目標横速度と後輪飽和舵角から目標前輪舵角を算出したが、例えば、目標ヨーレイトと後輪飽和舵角から目標前輪舵角及び目標横速度を算出しても良い。このときの目標前輪舵角は下記式(21)に、目標横速度は下記式(22)に表される。
(式21)
【図面の簡単な説明】
【図1】第1実施例における基本構成を示す概略図である。
【図2】第1実施例における、操舵制御コントローラの構成を表すブロック図である。
【図3】第1実施例における、目標値生成部の構成を表すブロック図である。
【図4】第1実施例における、目標出力値生成部の構成を表すブロック図である。
【図5】第1実施例における、横速度パラメータを表すマップである。
【図6】第1実施例における、ヨーレイトパラメータを表すマップである。
【図7】第1実施例における操舵制御を表すフローチャートである。
【図8】第1実施例におけるシミュレーション結果のフロント舵角を表す図である。
【図9】第1実施例におけるシミュレーション結果の後輪操舵角を表す図である。
【図10】従来例におけるシミュレーション結果のヨーレイトを表す図である。
【図11】従来例におけるシミュレーション結果の横速度を表す図である。
【図12】従来例におけるシミュレーション結果のフロント舵角を表す図である。
【図13】従来例におけるシミュレーション結果の後輪操舵角を表す図である。
【図14】従来例におけるシミュレーション結果のヨーレイトを表す図である。
【図15】従来例におけるシミュレーション結果の横速度を表す図である。
【符号の説明】
1L,1R 前輪
2 ハンドル
3L,3R 前輪操舵機構
4 ステアリングユニット
5 車体
6 弾性体
7 前輪側油圧シリンダ
8L,8R 後輪
9L,9R 後輪操舵機構
10 後輪側油圧シリンダ
11 油圧源ユニット
12 前輪側フェールセーフバルブ
13 前輪側サーボバルブ
14 後輪側フェールセーフバルブ
15 後輪側サーボバルブ
16 エンジン
18,19 サーボアンプ
20 車速センサ
21 操舵角センサ
23 エンジン回転数センサ
24 前輪側変位センサ
25 後輪側変位センサ
26 ニュートラルスイッチ
27 クラッチスイッチ
28 ストップランプスイッチ
30 操舵制御コントローラ
31 目標値生成部
32 目標出力値生成部
34 前輪操舵コントローラ
35 後輪操舵コントローラ
37 前輪操舵アクチュエータ
38 後輪操舵アクチュエータ
311 車両モデル演算部
312 目標値演算部
321 目標後輪舵角演算部
322 目標前輪舵角演算部
Claims (2)
- ハンドル操舵角を検出するハンドル操舵角検出手段と、
車速を検出する車速検出手段と、
前輪に補助舵角を付与する前輪補助舵角付与手段と、
後輪に補助舵角を付与する後輪補助舵角付与手段と、
検出されたハンドル操舵角及び車速に基づいて車両モデルから前輪補助舵角及び後輪補助舵角を算出し、前記前輪補助舵角付与手段及び前記後輪補助舵角付与手段に指令信号を出力する前後輪補助舵角制御手段と、
を備えた車両用舵角制御装置において、
前記前後輪補助舵角制御手段を、後輪補助舵角が制限上限に達したかどうかを判断する制限上限判断部を有し、後輪補助舵角が制限上限に達したと判断したときは、前記前輪補助舵角のハンドル操舵角に対する変化量を制限上限に達する前よりも制限する手段としたことを特徴とする車両用舵角制御装置。 - 請求項1に記載の車両用舵角制御装置において、
前記前後輪補助舵角制御手段を、前記後輪補助舵角が制限上限未満の時は、検出されたハンドル操舵角及び車速に基づいて車両モデルから目標ヨーレイト及び目標横速度を算出し、算出された前記目標ヨーレイト及び目標横速度となるように目標前輪舵角及び目標後輪舵角を演算し、演算された目標前後輪舵角となるように前記前輪補助舵角付与手段及び後輪補助舵角付与手段に指令信号を出力し、
前記後輪補助舵角が制限上限に達したときは、目標値として目標ヨーレイトのみ、もしくは目標横速度のみとし、後輪補助舵角を制限上限値として目標前輪舵角を演算し、演算された目標前輪舵角となるように前記前輪補助舵角付与手段に指令信号を出力する手段としたことを特徴とする車両用舵角制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002354928A JP4186605B2 (ja) | 2002-12-06 | 2002-12-06 | 車両用舵角制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002354928A JP4186605B2 (ja) | 2002-12-06 | 2002-12-06 | 車両用舵角制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004182196A true JP2004182196A (ja) | 2004-07-02 |
| JP4186605B2 JP4186605B2 (ja) | 2008-11-26 |
Family
ID=32755766
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002354928A Expired - Fee Related JP4186605B2 (ja) | 2002-12-06 | 2002-12-06 | 車両用舵角制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4186605B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008062832A (ja) * | 2006-09-08 | 2008-03-21 | Suzuki Motor Corp | 車両用操舵装置 |
| JP2009544519A (ja) * | 2006-07-21 | 2009-12-17 | ルノー・エス・アー・エス | 被操舵後輪に対する旋回指令をモニタリングする装置及び方法 |
| JP2013095353A (ja) * | 2011-11-04 | 2013-05-20 | Toyota Motor Corp | 車両操舵装置 |
| CN114044001A (zh) * | 2021-11-30 | 2022-02-15 | 武汉路特斯汽车有限公司 | 一种辅助手动泊车的方法、装置及车辆 |
-
2002
- 2002-12-06 JP JP2002354928A patent/JP4186605B2/ja not_active Expired - Fee Related
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009544519A (ja) * | 2006-07-21 | 2009-12-17 | ルノー・エス・アー・エス | 被操舵後輪に対する旋回指令をモニタリングする装置及び方法 |
| JP2008062832A (ja) * | 2006-09-08 | 2008-03-21 | Suzuki Motor Corp | 車両用操舵装置 |
| JP2013095353A (ja) * | 2011-11-04 | 2013-05-20 | Toyota Motor Corp | 車両操舵装置 |
| CN114044001A (zh) * | 2021-11-30 | 2022-02-15 | 武汉路特斯汽车有限公司 | 一种辅助手动泊车的方法、装置及车辆 |
| CN114044001B (zh) * | 2021-11-30 | 2023-10-20 | 武汉路特斯汽车有限公司 | 一种辅助手动泊车的方法、装置及车辆 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4186605B2 (ja) | 2008-11-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4166676B2 (ja) | 車両安定性向上システムのための方法及び装置 | |
| JP2004175353A (ja) | 車両安定性向上システムのための方法及び装置 | |
| CN101704382B (zh) | 驱动转向轮的车辆用电动转向装置的控制装置 | |
| JP4069754B2 (ja) | 車両運動制御装置 | |
| JP5347499B2 (ja) | 車両制御装置及び車両制御方法 | |
| JP6734905B2 (ja) | 車両挙動安定化装置 | |
| JP2007503358A (ja) | チルト調節装置及び車両のチルトを調節する方法 | |
| JP4186605B2 (ja) | 車両用舵角制御装置 | |
| JP5314445B2 (ja) | 車両運動制御システム | |
| JP4186585B2 (ja) | 車両用舵角制御装置 | |
| JP4186606B2 (ja) | 車両用舵角制御装置 | |
| JP4123956B2 (ja) | 車両用舵角制御装置 | |
| CN115107713A (zh) | 车辆控制系统 | |
| JP3626388B2 (ja) | 車両の姿勢制御装置 | |
| JP2010158963A (ja) | 車両制御装置及び車両制御方法 | |
| JP4123955B2 (ja) | 車両用舵角制御装置 | |
| JP4026504B2 (ja) | 車両運動制御装置 | |
| JP3626654B2 (ja) | 車両の姿勢制御装置 | |
| JP4123958B2 (ja) | 車両用舵角制御装置 | |
| JP3896946B2 (ja) | 車両用舵角制御装置 | |
| JP2004148891A (ja) | 車両用舵角制御装置 | |
| JP4172276B2 (ja) | 車両用舵角制御装置 | |
| JP4959277B2 (ja) | 車両運動制御装置 | |
| JP4172277B2 (ja) | 車両用舵角制御装置 | |
| JP2884864B2 (ja) | 制動力制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051026 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20051117 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080131 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080226 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080417 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080819 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080901 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110919 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120919 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120919 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130919 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |