JP2004198110A - 校正用基板 - Google Patents
校正用基板 Download PDFInfo
- Publication number
- JP2004198110A JP2004198110A JP2002363181A JP2002363181A JP2004198110A JP 2004198110 A JP2004198110 A JP 2004198110A JP 2002363181 A JP2002363181 A JP 2002363181A JP 2002363181 A JP2002363181 A JP 2002363181A JP 2004198110 A JP2004198110 A JP 2004198110A
- Authority
- JP
- Japan
- Prior art keywords
- calibration
- measurement
- substrate
- calibration substrate
- lattice
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Length Measuring Devices By Optical Means (AREA)
Abstract
【課題】計測個所が異なる場合においても、共通して使用することができる校正用基板を提供する。
【解決手段】2つの計測個所を撮像するように配置した2つの計測用カメラの各々の撮像画像に基づいて前記2つの計測個所の間隔を計測する寸法計測装置を校正するための校正用基板であって、前記間隔の最大値を含む範囲に格子模様が形成されているようにした校正用基板。
【選択図】 図3
【解決手段】2つの計測個所を撮像するように配置した2つの計測用カメラの各々の撮像画像に基づいて前記2つの計測個所の間隔を計測する寸法計測装置を校正するための校正用基板であって、前記間隔の最大値を含む範囲に格子模様が形成されているようにした校正用基板。
【選択図】 図3
Description
【0001】
【発明の属する技術分野】
本発明は計測装置を校正する技術分野に属する。特に、2つの計測個所を撮像するように配置した2つの計測用カメラの各々の撮像画像に基づいて2つの計測個所の間隔を計測する寸法計測装置を校正するための校正用基板に関する。
【0002】
【従来技術】
計測対象物体における2つの特徴個所の間隔を計測する方法として、計測用カメラでそれら2つの特徴個所を撮像し、得られた撮像画像における特徴個所の間隔に存在する画素数から換算する方法が知られている。この方法で、1つの計測用カメラの撮像領域に納まらないほど離れた2つの特徴個所を撮像するとき、撮像領域を狭くして撮像画像において間隔の高い分解能を得るときには2つの計測用カメラを使用する。すなわち、2つの計測用カメラの各々で2つの特徴個所を撮像し、得られた撮像画像の各々における特徴個所の位置と、2つの計測用カメラの間隔とから2つの特徴個所の間隔を計測することが行なわれる(たとえば、特願2001−213132、特願2001−213133)。
【0003】
このように2つの計測用カメラを使用する方法において、2つの計測用カメラの間隔の安定性、再現性が得られないときには、高い分解能を生かした高精度の計測を行うことができない。したがって、実際の計測を行う直前において校正用基板において所定マークの間隔を計測して校正を行ってから、計測対象物体における特徴個所の間隔を計測することが行なわれている。
【発明が解決しようとする課題】
ところが、この校正に使用される従来の校正用基板は、計測しようとする個所における間隔の各々に合わせ、その間隔を空けて基板にマークを付したものである。すなわち、計測しようとする個所が異なれば異なった校正用基板を使用する必要があるものである。したがって、計測しようとする個所の数だけ、校正用基板を用意しておく必要性がある。また、新たに計測個所が増えたときには校正用基板も新たに用意する必要性がある。
【0004】
本発明はこのような課題を解決するためになされたものであり、その目的は、計測個所が異なる場合においても、共通して使用することができる校正用基板を提供することにある。
【0005】
【課題を解決するための手段】
上記課題は下記の本発明によって解決される。すなわち、
本発明の請求項1に係る校正用基板は、2つの計測個所を撮像するように配置した2つの計測用カメラの各々の撮像画像に基づいて前記2つの計測個所の間隔を計測する寸法計測装置を校正するための校正用基板であって、前記間隔の最大値を含む範囲に格子模様または位置マークが形成されているようにしたものである。
【0006】
本発明によれば、2つの計測個所における間隔の最大値を含む範囲に格子模様または位置マークが形成されている。たとえば、この格子模様における縦格子と横格子との交点(格子点)を校正のための計測個所とすることができる。また、位置マークにおける位置を指示する個所を校正のための計測個所とすることができる。格子模様におけるその格子点または位置マークにおける位置を指示する個所は校正用基板の全体に形成することができる。したがって、計測個所が異なる場合においても、共通して使用することができる校正用基板が提供される。
【0007】
また本発明の請求項2に係る校正用基板は、請求項1に係る校正用基板において、前記格子模様における縦格子の配列間隔は前記計測用カメラの撮像範囲における横寸法と一致し、前記格子模様における横格子の配列間隔は前記計測用カメラの撮像範囲における縦寸法と一致しているようにしたものである。
【0008】
本発明によれば、計測用カメラの撮像範囲に入る格子点の数は1つだけとなるから、撮像画像における格子点を選択する必要性がない。したがって正確な校正を容易に行うことができる。なお、撮像範囲の縁と格子とが完全に一致する特殊な配置では格子点の数は0となり校正を行うことができなくなるが、撮像範囲を若干ずらせば校正を行うことができるようになる。
【0009】
また本発明の請求項3に係る校正用基板は、請求項1に係る校正用基板において、前記格子模様における縦格子と横格子によって仕切られた矩形の内部に模様またはマークが配置されており、前記模様または前記マークは前記計測用カメラの撮像範囲において互いに相違する種類であるようにしたものである。
【0010】
本発明によれば、計測用カメラの撮像範囲に入る格子点の数が複数であっても、矩形の内部の模様またはマークは計測用カメラの撮像範囲において互いに相違する種類である。すなわち、撮像画像における複数の格子点から校正に使用する格子点を、模様またはマークに基づいて選択することができる。したがって、正確な校正を容易に行うことができる。また、撮像範囲の設定によらず必ず校正を行うことができる。
【0011】
【発明の実施の形態】
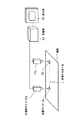
次に、本発明について実施の形態を説明する。本発明の校正用基板について説明する前に、その校正用基板によって校正が行なわれる寸法計測装置について図1を参照して説明をしておく。図1は寸法計測装置の構成を示す図である。図1において、1は基板、2a,2bは位置マーク、11a,11bは計測用カメラ、12は処理部、13は表示部である。
【0012】
基板1は校正用基板または計測対象を想定して示したものである。基板1には2つの位置マーク2a,2bが形成されており、それらの間隔である長寸法Lは、基板1が校正用基板であれば、寸法計測装置を校正するための基準寸法である。また基板1が計測対象であれば、それらの間隔は、寸法計測装置によって計測する寸法である。
【0013】
寸法計測装置の計測用カメラ11a,11bは、それらを支持し移動する機構(図示せず)によって位置マーク2a,2bがそれらの撮像領域(視野)に納まる位置に移動が行なわれる。校正用基板を撮像するときと計測対象を撮像するときにおいて、計測用カメラ11a,11bの位置が変化しないようにその位置に固定される。計測用カメラ11a,11bが位置マーク2a,2bを撮像して出力する撮像信号は処理部12が入力する。
【0014】
寸法計測装置の処理部12は、それらの入力した撮像信号をA/D変換して位置マーク2a,2bの2つの撮像画像を生成する。さらに処理部12は、位置マーク2a,2bの各々の撮像画像における座標を演算する。その座標の演算には、パターンマッチング等の周知の方法が適用される。基板1が校正用基板であれば校正用基板の撮像画像における2つの位置マークの座標が得られる。基板1が計測対象であれば計測対象の撮像画像における2つの位置マークの座標が得られる。
【0015】
これらの座標は、撮像画像における座標であり基板上の座標ではない。校正用基板については基板上の2つの位置マークの座標は既知の座標であるから、ここで、計測対象の基板上における2つの位置マークの座標を下記の数1に示す数式を適用して演算することができる。
【数1】
Gn#x=G0n#x+(F0n#x−Fn#x)×Pel
Gn#y=G0n#y+(F0n#y−Fn#y)×Pel
ただし、
Gn#x:計測対象の基板上における位置マークx座標
G0n#x:校正用基板の基板上における位置マークx座標
F0n#x:校正用基板の撮像画像における位置マークx座標
Fn#x:計測対象の撮像画像における位置マークx座標
Pel:カメラ分解能(画素が正方形でなく長方形のときにはPelx,Pely)
Gn#y:計測対象の基板上における位置マークy座標
G0n#y:校正用基板の基板上における位置マークy座標
F0n#y:校正用基板の撮像画像における位置マークy座標
Fn#y:計測対象の撮像画像における位置マークy座標
【0016】
処理部12は、上記の数1を適用することにより計測対象の基板上における2つの位置マークの座標を演算する。さらに処理部12は、この基板上における2つの位置マークの座標に基づいて、2つの位置マークの間隔すなわち長寸法Lを演算する。
寸法計測装置の表示部13は、その長寸法Lを表示する。
【0017】
本発明の校正用基板について説明する前に、次に、校正用基板によって上述した寸法計測装置の校正を行なう過程について図2を参照して説明をしておく。図2は寸法計測装置を校正する過程を示すブロック図である。
まず、図2のステップS1において、寸法計測装置を操作し計測用カメラ11a,11bを各々の撮像領域に位置マーク2a,2bが納まるように移動する。
たとえば、オペレータが操作パネル(図示せず)において、移動の指示入力を行うと、撮像画像が表示部13に表示され、その撮像画像に位置マーク2a,2bが撮り込まれるようにする。
【0018】
次に、ステップS2において、校正用基板(基板1)の位置マーク2a,2bの座標を寸法計測装置に入力する。たとえば、オペレータが操作パネルにおいて数値入力を行う。校正用基板の基板上における座標は、上述のように(G0n#x,G0n#y)と表すから、位置マーク2aの座標は(G01#x,G01#y)、位置マーク2bの座標は(G02#x,G02#y)のように表す。位置マーク2a,2bの座標は、処理部12のメモリに記憶される。なお、ステップS1,S2は順番が入れ替わってもよい。
【0019】
次に、ステップS3において、校正用基板の計測を行う。すなわち、計測用カメラ11a,11bは位置マーク2a,2bを撮像し、処理部12は撮像信号をA/D変換して各々の撮像画像を生成する。
【0020】
次に、ステップS4において、処理部12は、校正用基板の撮像画像における位置マーク2aの座標(F01#x,F01#y)、位置マーク2bの座標(F02#x,F02#y)を演算する。それらの座標は処理部12のメモリに記憶される。なお、座標Pel:カメラ分解能は、寸法計測装置の固有の定数として登録されている。以上で、処理部12には、数1における校正用基板に関連する変数のすべてが記憶されていることになる。すなわち、寸法計測装置の校正は完了する。
【0021】
したがって、次に、ステップS5において、計測を開始し、計測対象の位置マーク2a,2bを撮像し、その撮像画像における位置マーク2aの座標(F1#x,F1#y)、位置マーク2bの座標(F2#x,F2#y)を演算する。これにより、数1における右辺の変数のすべてが得られることとなり、数1における右辺の変数の値を演算することができる。すなわち、処理部12は、計測対象の基板上における位置マーク2aの座標(G1#x,G1#y)、位置マーク2bの座標(G2#x,G2#y)を演算する。
【0022】
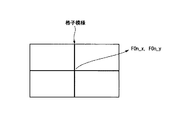
次に、本発明の校正用基板について図3を参照して説明する。図3は本発明の校正用基板の一例を示す図である。図3に示すように、校正用基板は、その全体に格子模様が形成されている。格子模様における格子点は、縦格子と横格子との交差部分である。したがって、格子模様の十字部分を位置マークとして用いることができる。十字部分は、縦格子と横格子の間隔で配列している。すなわち、測定個所の変更がある場合においても、計測用カメラの撮像領域(視野)に十字部分が入るようにすることができる。したがって、同一の校正用基板を使用して校正を行うことができる。
【0023】
計測用カメラによって校正用基板を撮像した撮像画像の一例を図4に示す。図4に示す撮像画像おいては、格子模様の縦格子と横格子の各々の一本づつだけ、すなわち格子模様における1つの十字部分だけが撮像されている。十字部分を位置マークとするとき、その座標は格子模様における縦格子と横格子との交差部分の座標、すなわち格子点の座標である。図3においては、座標(F0n#x,F0n#y)で示してある。
【0024】
この格子点の座標は、周知の方法を適用して演算することができる。たとえば、テンプレートを適用したパターンマッチングにより検出することができる。格子点の座標は、テンプレートとの相関係数が最も大きくなるテンプレートの座標として演算することができる。また、縦方向に画素値を加算して得た頻度分布のピークとして縦格子を検出し、横方向に画素値を加算して得た頻度分布のピークとして横格子を検出し、縦格子と横格子の共通画素として交差部分を検出することができる。交差部分が複数の画素で構成されるときには、その重心を格子点の座標とする。
【0025】
なお、計測用カメラの撮像領域に2個以上の十字部分が入ると、基準とする十字部分を2個以上の十字部分から選択する処理を必要とする。また、計測用カメラの撮像領域に1個の十字部分も入らないようでは校正を行うことができなくなる。そこで、図3に示す校正用基板において、格子模様における縦格子の配列間隔は計測用カメラの撮像範囲における横寸法と一致し、格子模様における横格子の配列間隔は計測用カメラの撮像範囲における縦寸法と一致しているように格子模様を形成する。
【0026】
これにより、計測用カメラの撮像範囲に入る格子点の数は1つだけとなるから、撮像画像における格子点を選択する必要性がない。したがって正確な校正を容易に行うことができる。なお、撮像範囲の縁と格子とが完全に一致する特殊な配置では格子点の数は0となり校正を行うことができなくなるが、撮像範囲を若干ずらせば校正を行うことができるようになる。
【0027】
次に、本発明の校正用基板について別の一例を図5を参照して説明する。図5に示すように、校正用基板は、その全体に格子模様が形成されており、さらに格子模様における縦格子と横格子によって仕切られた矩形の内部に模様またはマークが配置されている。また、それらの模様またはマークは計測用カメラの撮像範囲において互いに相違する種類であるように配置されている。
【0028】
図3に示した校正用基板と同様に図5に示す校正用基板においても、格子模様における格子点は、縦格子と横格子との交差部分である。したがって、格子模様の十字部分を位置マークとして用いることができる。十字部分は、縦格子と横格子の間隔で配列している。すなわち、測定個所の変更がある場合においても、計測用カメラの撮像領域(視野)に十字部分が入るようにすることができる。したがって、同一の校正用基板を使用して校正を行うことができる。
【0029】
また、図5に示す校正用基板であれば、計測用カメラの撮像範囲に入る十字部分の個数が複数であっても、格子模様における矩形の内部の模様またはマークは計測用カメラの撮像範囲において互いに相違する種類となっている。すなわち、撮像画像における複数の格子点から校正に使用する格子点を、模様またはマークに基づいて選択することができる。したがって、正確な校正を容易に行うことができる。また、撮像範囲の設定によらず必ず校正を行うことができる。
【0030】
計測用カメラによって校正用基板を撮像した撮像画像の一例を図6に示す。図6(A)は図3に示す格子模様だけの校正用基板の撮像画像であり、図6(B)は図5に示す格子により造られる矩形の内部に模様またはマークが配置されている校正基板の撮像画像である。いずれの撮像画像にも格子模様における複数の十字部が撮り込まれている。
【0031】
図6(A)に示す撮像画像においては、複数の十字部の各々を特定することができない。したがって、その撮像画像だけでは校正のために使用する十字部を決定することができない。
【0032】
図6(B)に示す撮像画像においては、複数の十字部の各々は、矩形の内部に配置されている模様またはマークとの配置における関係が存在する。模様またはマークは複数が配置されているが、撮像画像において完全な形状の模様またはマークは、互いに相違する種類となっている。すなわち、模様またはマークは、計測用カメラの撮像範囲において互いに相違する種類となっている。したがって、完全な形状の模様またはマークとの関係によって複数の十字部の各々を特定することができる。
【0033】
たとえば、図6(B)において「●」で示す模様またはマークの左上の十字部は撮像画像においては1つだけ存在するから、その指定により十字部を特定することができる。また、図6(B)において「◯」で示す模様またはマークの右上の十字部は撮像画像においては1つだけ存在するから、その指定により十字部を特定することができる。
【0034】
この模様またはマークは、周知の方法を適用して識別することができる。たとえば、テンプレートを適用したパターンマッチングにより識別することができる。パターンマッチングにおいては完全な形状の模様またはマークだけが識別される。完全な形状の模様またはマークを識別し、その模様またはマークとの位置関係で指定された十字部が特定される。したがて、図5に示す校正用基板においては、撮像画像に格子模様における複数の十字部が撮り込まれていても校正を行うことができる。
【0035】
【発明の効果】
以上のとおりであるから、本発明の請求項1に係る校正用基板によれば、計測個所が異なる場合においても、共通して使用することができる校正用基板が提供される。
また本発明の請求項2に係る校正用基板によれば、撮像画像における格子点を選択することなく校正を行うことができる
また本発明の請求項3に係る校正用基板によれば、撮像画像における複数の格子点から校正に使用する格子点を、模様またはマークに基づいて選択することにより校正を行うことができる。また、撮像範囲の設定によらず必ず校正を行うことができる。
【図面の簡単な説明】
【図1】校正用基板によって校正が行なわれる寸法計測装置の構成を示す図である。
【図2】寸法計測装置を校正する過程を示すブロック図である。
【図3】本発明の校正用基板の一例(その1)を示す図である。
【図4】計測用カメラによって校正用基板を撮像した撮像画像の一例(その1)を示す図である。
【図5】本発明の校正用基板の一例(その2)を示す図である。
【図6】計測用カメラによって校正用基板を撮像した撮像画像の一例(その2)を示す図である。
【符号の説明】
1 基板
2a,2b 位置マーク
11a,11b 計測用カメラ
12 処理部
13 表示部
【発明の属する技術分野】
本発明は計測装置を校正する技術分野に属する。特に、2つの計測個所を撮像するように配置した2つの計測用カメラの各々の撮像画像に基づいて2つの計測個所の間隔を計測する寸法計測装置を校正するための校正用基板に関する。
【0002】
【従来技術】
計測対象物体における2つの特徴個所の間隔を計測する方法として、計測用カメラでそれら2つの特徴個所を撮像し、得られた撮像画像における特徴個所の間隔に存在する画素数から換算する方法が知られている。この方法で、1つの計測用カメラの撮像領域に納まらないほど離れた2つの特徴個所を撮像するとき、撮像領域を狭くして撮像画像において間隔の高い分解能を得るときには2つの計測用カメラを使用する。すなわち、2つの計測用カメラの各々で2つの特徴個所を撮像し、得られた撮像画像の各々における特徴個所の位置と、2つの計測用カメラの間隔とから2つの特徴個所の間隔を計測することが行なわれる(たとえば、特願2001−213132、特願2001−213133)。
【0003】
このように2つの計測用カメラを使用する方法において、2つの計測用カメラの間隔の安定性、再現性が得られないときには、高い分解能を生かした高精度の計測を行うことができない。したがって、実際の計測を行う直前において校正用基板において所定マークの間隔を計測して校正を行ってから、計測対象物体における特徴個所の間隔を計測することが行なわれている。
【発明が解決しようとする課題】
ところが、この校正に使用される従来の校正用基板は、計測しようとする個所における間隔の各々に合わせ、その間隔を空けて基板にマークを付したものである。すなわち、計測しようとする個所が異なれば異なった校正用基板を使用する必要があるものである。したがって、計測しようとする個所の数だけ、校正用基板を用意しておく必要性がある。また、新たに計測個所が増えたときには校正用基板も新たに用意する必要性がある。
【0004】
本発明はこのような課題を解決するためになされたものであり、その目的は、計測個所が異なる場合においても、共通して使用することができる校正用基板を提供することにある。
【0005】
【課題を解決するための手段】
上記課題は下記の本発明によって解決される。すなわち、
本発明の請求項1に係る校正用基板は、2つの計測個所を撮像するように配置した2つの計測用カメラの各々の撮像画像に基づいて前記2つの計測個所の間隔を計測する寸法計測装置を校正するための校正用基板であって、前記間隔の最大値を含む範囲に格子模様または位置マークが形成されているようにしたものである。
【0006】
本発明によれば、2つの計測個所における間隔の最大値を含む範囲に格子模様または位置マークが形成されている。たとえば、この格子模様における縦格子と横格子との交点(格子点)を校正のための計測個所とすることができる。また、位置マークにおける位置を指示する個所を校正のための計測個所とすることができる。格子模様におけるその格子点または位置マークにおける位置を指示する個所は校正用基板の全体に形成することができる。したがって、計測個所が異なる場合においても、共通して使用することができる校正用基板が提供される。
【0007】
また本発明の請求項2に係る校正用基板は、請求項1に係る校正用基板において、前記格子模様における縦格子の配列間隔は前記計測用カメラの撮像範囲における横寸法と一致し、前記格子模様における横格子の配列間隔は前記計測用カメラの撮像範囲における縦寸法と一致しているようにしたものである。
【0008】
本発明によれば、計測用カメラの撮像範囲に入る格子点の数は1つだけとなるから、撮像画像における格子点を選択する必要性がない。したがって正確な校正を容易に行うことができる。なお、撮像範囲の縁と格子とが完全に一致する特殊な配置では格子点の数は0となり校正を行うことができなくなるが、撮像範囲を若干ずらせば校正を行うことができるようになる。
【0009】
また本発明の請求項3に係る校正用基板は、請求項1に係る校正用基板において、前記格子模様における縦格子と横格子によって仕切られた矩形の内部に模様またはマークが配置されており、前記模様または前記マークは前記計測用カメラの撮像範囲において互いに相違する種類であるようにしたものである。
【0010】
本発明によれば、計測用カメラの撮像範囲に入る格子点の数が複数であっても、矩形の内部の模様またはマークは計測用カメラの撮像範囲において互いに相違する種類である。すなわち、撮像画像における複数の格子点から校正に使用する格子点を、模様またはマークに基づいて選択することができる。したがって、正確な校正を容易に行うことができる。また、撮像範囲の設定によらず必ず校正を行うことができる。
【0011】
【発明の実施の形態】
次に、本発明について実施の形態を説明する。本発明の校正用基板について説明する前に、その校正用基板によって校正が行なわれる寸法計測装置について図1を参照して説明をしておく。図1は寸法計測装置の構成を示す図である。図1において、1は基板、2a,2bは位置マーク、11a,11bは計測用カメラ、12は処理部、13は表示部である。
【0012】
基板1は校正用基板または計測対象を想定して示したものである。基板1には2つの位置マーク2a,2bが形成されており、それらの間隔である長寸法Lは、基板1が校正用基板であれば、寸法計測装置を校正するための基準寸法である。また基板1が計測対象であれば、それらの間隔は、寸法計測装置によって計測する寸法である。
【0013】
寸法計測装置の計測用カメラ11a,11bは、それらを支持し移動する機構(図示せず)によって位置マーク2a,2bがそれらの撮像領域(視野)に納まる位置に移動が行なわれる。校正用基板を撮像するときと計測対象を撮像するときにおいて、計測用カメラ11a,11bの位置が変化しないようにその位置に固定される。計測用カメラ11a,11bが位置マーク2a,2bを撮像して出力する撮像信号は処理部12が入力する。
【0014】
寸法計測装置の処理部12は、それらの入力した撮像信号をA/D変換して位置マーク2a,2bの2つの撮像画像を生成する。さらに処理部12は、位置マーク2a,2bの各々の撮像画像における座標を演算する。その座標の演算には、パターンマッチング等の周知の方法が適用される。基板1が校正用基板であれば校正用基板の撮像画像における2つの位置マークの座標が得られる。基板1が計測対象であれば計測対象の撮像画像における2つの位置マークの座標が得られる。
【0015】
これらの座標は、撮像画像における座標であり基板上の座標ではない。校正用基板については基板上の2つの位置マークの座標は既知の座標であるから、ここで、計測対象の基板上における2つの位置マークの座標を下記の数1に示す数式を適用して演算することができる。
【数1】
Gn#x=G0n#x+(F0n#x−Fn#x)×Pel
Gn#y=G0n#y+(F0n#y−Fn#y)×Pel
ただし、
Gn#x:計測対象の基板上における位置マークx座標
G0n#x:校正用基板の基板上における位置マークx座標
F0n#x:校正用基板の撮像画像における位置マークx座標
Fn#x:計測対象の撮像画像における位置マークx座標
Pel:カメラ分解能(画素が正方形でなく長方形のときにはPelx,Pely)
Gn#y:計測対象の基板上における位置マークy座標
G0n#y:校正用基板の基板上における位置マークy座標
F0n#y:校正用基板の撮像画像における位置マークy座標
Fn#y:計測対象の撮像画像における位置マークy座標
【0016】
処理部12は、上記の数1を適用することにより計測対象の基板上における2つの位置マークの座標を演算する。さらに処理部12は、この基板上における2つの位置マークの座標に基づいて、2つの位置マークの間隔すなわち長寸法Lを演算する。
寸法計測装置の表示部13は、その長寸法Lを表示する。
【0017】
本発明の校正用基板について説明する前に、次に、校正用基板によって上述した寸法計測装置の校正を行なう過程について図2を参照して説明をしておく。図2は寸法計測装置を校正する過程を示すブロック図である。
まず、図2のステップS1において、寸法計測装置を操作し計測用カメラ11a,11bを各々の撮像領域に位置マーク2a,2bが納まるように移動する。
たとえば、オペレータが操作パネル(図示せず)において、移動の指示入力を行うと、撮像画像が表示部13に表示され、その撮像画像に位置マーク2a,2bが撮り込まれるようにする。
【0018】
次に、ステップS2において、校正用基板(基板1)の位置マーク2a,2bの座標を寸法計測装置に入力する。たとえば、オペレータが操作パネルにおいて数値入力を行う。校正用基板の基板上における座標は、上述のように(G0n#x,G0n#y)と表すから、位置マーク2aの座標は(G01#x,G01#y)、位置マーク2bの座標は(G02#x,G02#y)のように表す。位置マーク2a,2bの座標は、処理部12のメモリに記憶される。なお、ステップS1,S2は順番が入れ替わってもよい。
【0019】
次に、ステップS3において、校正用基板の計測を行う。すなわち、計測用カメラ11a,11bは位置マーク2a,2bを撮像し、処理部12は撮像信号をA/D変換して各々の撮像画像を生成する。
【0020】
次に、ステップS4において、処理部12は、校正用基板の撮像画像における位置マーク2aの座標(F01#x,F01#y)、位置マーク2bの座標(F02#x,F02#y)を演算する。それらの座標は処理部12のメモリに記憶される。なお、座標Pel:カメラ分解能は、寸法計測装置の固有の定数として登録されている。以上で、処理部12には、数1における校正用基板に関連する変数のすべてが記憶されていることになる。すなわち、寸法計測装置の校正は完了する。
【0021】
したがって、次に、ステップS5において、計測を開始し、計測対象の位置マーク2a,2bを撮像し、その撮像画像における位置マーク2aの座標(F1#x,F1#y)、位置マーク2bの座標(F2#x,F2#y)を演算する。これにより、数1における右辺の変数のすべてが得られることとなり、数1における右辺の変数の値を演算することができる。すなわち、処理部12は、計測対象の基板上における位置マーク2aの座標(G1#x,G1#y)、位置マーク2bの座標(G2#x,G2#y)を演算する。
【0022】
次に、本発明の校正用基板について図3を参照して説明する。図3は本発明の校正用基板の一例を示す図である。図3に示すように、校正用基板は、その全体に格子模様が形成されている。格子模様における格子点は、縦格子と横格子との交差部分である。したがって、格子模様の十字部分を位置マークとして用いることができる。十字部分は、縦格子と横格子の間隔で配列している。すなわち、測定個所の変更がある場合においても、計測用カメラの撮像領域(視野)に十字部分が入るようにすることができる。したがって、同一の校正用基板を使用して校正を行うことができる。
【0023】
計測用カメラによって校正用基板を撮像した撮像画像の一例を図4に示す。図4に示す撮像画像おいては、格子模様の縦格子と横格子の各々の一本づつだけ、すなわち格子模様における1つの十字部分だけが撮像されている。十字部分を位置マークとするとき、その座標は格子模様における縦格子と横格子との交差部分の座標、すなわち格子点の座標である。図3においては、座標(F0n#x,F0n#y)で示してある。
【0024】
この格子点の座標は、周知の方法を適用して演算することができる。たとえば、テンプレートを適用したパターンマッチングにより検出することができる。格子点の座標は、テンプレートとの相関係数が最も大きくなるテンプレートの座標として演算することができる。また、縦方向に画素値を加算して得た頻度分布のピークとして縦格子を検出し、横方向に画素値を加算して得た頻度分布のピークとして横格子を検出し、縦格子と横格子の共通画素として交差部分を検出することができる。交差部分が複数の画素で構成されるときには、その重心を格子点の座標とする。
【0025】
なお、計測用カメラの撮像領域に2個以上の十字部分が入ると、基準とする十字部分を2個以上の十字部分から選択する処理を必要とする。また、計測用カメラの撮像領域に1個の十字部分も入らないようでは校正を行うことができなくなる。そこで、図3に示す校正用基板において、格子模様における縦格子の配列間隔は計測用カメラの撮像範囲における横寸法と一致し、格子模様における横格子の配列間隔は計測用カメラの撮像範囲における縦寸法と一致しているように格子模様を形成する。
【0026】
これにより、計測用カメラの撮像範囲に入る格子点の数は1つだけとなるから、撮像画像における格子点を選択する必要性がない。したがって正確な校正を容易に行うことができる。なお、撮像範囲の縁と格子とが完全に一致する特殊な配置では格子点の数は0となり校正を行うことができなくなるが、撮像範囲を若干ずらせば校正を行うことができるようになる。
【0027】
次に、本発明の校正用基板について別の一例を図5を参照して説明する。図5に示すように、校正用基板は、その全体に格子模様が形成されており、さらに格子模様における縦格子と横格子によって仕切られた矩形の内部に模様またはマークが配置されている。また、それらの模様またはマークは計測用カメラの撮像範囲において互いに相違する種類であるように配置されている。
【0028】
図3に示した校正用基板と同様に図5に示す校正用基板においても、格子模様における格子点は、縦格子と横格子との交差部分である。したがって、格子模様の十字部分を位置マークとして用いることができる。十字部分は、縦格子と横格子の間隔で配列している。すなわち、測定個所の変更がある場合においても、計測用カメラの撮像領域(視野)に十字部分が入るようにすることができる。したがって、同一の校正用基板を使用して校正を行うことができる。
【0029】
また、図5に示す校正用基板であれば、計測用カメラの撮像範囲に入る十字部分の個数が複数であっても、格子模様における矩形の内部の模様またはマークは計測用カメラの撮像範囲において互いに相違する種類となっている。すなわち、撮像画像における複数の格子点から校正に使用する格子点を、模様またはマークに基づいて選択することができる。したがって、正確な校正を容易に行うことができる。また、撮像範囲の設定によらず必ず校正を行うことができる。
【0030】
計測用カメラによって校正用基板を撮像した撮像画像の一例を図6に示す。図6(A)は図3に示す格子模様だけの校正用基板の撮像画像であり、図6(B)は図5に示す格子により造られる矩形の内部に模様またはマークが配置されている校正基板の撮像画像である。いずれの撮像画像にも格子模様における複数の十字部が撮り込まれている。
【0031】
図6(A)に示す撮像画像においては、複数の十字部の各々を特定することができない。したがって、その撮像画像だけでは校正のために使用する十字部を決定することができない。
【0032】
図6(B)に示す撮像画像においては、複数の十字部の各々は、矩形の内部に配置されている模様またはマークとの配置における関係が存在する。模様またはマークは複数が配置されているが、撮像画像において完全な形状の模様またはマークは、互いに相違する種類となっている。すなわち、模様またはマークは、計測用カメラの撮像範囲において互いに相違する種類となっている。したがって、完全な形状の模様またはマークとの関係によって複数の十字部の各々を特定することができる。
【0033】
たとえば、図6(B)において「●」で示す模様またはマークの左上の十字部は撮像画像においては1つだけ存在するから、その指定により十字部を特定することができる。また、図6(B)において「◯」で示す模様またはマークの右上の十字部は撮像画像においては1つだけ存在するから、その指定により十字部を特定することができる。
【0034】
この模様またはマークは、周知の方法を適用して識別することができる。たとえば、テンプレートを適用したパターンマッチングにより識別することができる。パターンマッチングにおいては完全な形状の模様またはマークだけが識別される。完全な形状の模様またはマークを識別し、その模様またはマークとの位置関係で指定された十字部が特定される。したがて、図5に示す校正用基板においては、撮像画像に格子模様における複数の十字部が撮り込まれていても校正を行うことができる。
【0035】
【発明の効果】
以上のとおりであるから、本発明の請求項1に係る校正用基板によれば、計測個所が異なる場合においても、共通して使用することができる校正用基板が提供される。
また本発明の請求項2に係る校正用基板によれば、撮像画像における格子点を選択することなく校正を行うことができる
また本発明の請求項3に係る校正用基板によれば、撮像画像における複数の格子点から校正に使用する格子点を、模様またはマークに基づいて選択することにより校正を行うことができる。また、撮像範囲の設定によらず必ず校正を行うことができる。
【図面の簡単な説明】
【図1】校正用基板によって校正が行なわれる寸法計測装置の構成を示す図である。
【図2】寸法計測装置を校正する過程を示すブロック図である。
【図3】本発明の校正用基板の一例(その1)を示す図である。
【図4】計測用カメラによって校正用基板を撮像した撮像画像の一例(その1)を示す図である。
【図5】本発明の校正用基板の一例(その2)を示す図である。
【図6】計測用カメラによって校正用基板を撮像した撮像画像の一例(その2)を示す図である。
【符号の説明】
1 基板
2a,2b 位置マーク
11a,11b 計測用カメラ
12 処理部
13 表示部
Claims (3)
- 2つの計測個所を撮像するように配置した2つの計測用カメラの各々の撮像画像に基づいて前記2つの計測個所の間隔を計測する寸法計測装置を校正するための校正用基板であって、前記間隔の最大値を含む範囲に格子模様または位置マークが形成されていることを特徴とする校正用基板。
- 請求項1記載の校正用基板において、前記格子模様における縦格子の配列間隔は前記計測用カメラの撮像範囲における横寸法と一致し、前記格子模様における横格子の配列間隔は前記計測用カメラの撮像範囲における縦寸法と一致していることを特徴とする校正用基板。
- 請求項1記載の校正用基板において、前記格子模様における縦格子と横格子によって仕切られた矩形の内部に模様またはマークが配置されており、前記模様または前記マークは前記計測用カメラの撮像範囲において互いに相違する種類であることを特徴とする校正用基板。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002363181A JP2004198110A (ja) | 2002-12-16 | 2002-12-16 | 校正用基板 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002363181A JP2004198110A (ja) | 2002-12-16 | 2002-12-16 | 校正用基板 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004198110A true JP2004198110A (ja) | 2004-07-15 |
Family
ID=32761390
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002363181A Pending JP2004198110A (ja) | 2002-12-16 | 2002-12-16 | 校正用基板 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004198110A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008292259A (ja) * | 2007-05-23 | 2008-12-04 | Mitsutoyo Corp | 二次元格子校正装置、二次元格子校正方法、二次元格子校正プログラム、記録媒体 |
| JP2021031779A (ja) * | 2019-08-19 | 2021-03-01 | 株式会社Zozo | 物体上の距離を測定するための方法、システム、およびプログラム |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62226009A (ja) * | 1986-03-19 | 1987-10-05 | ロ−ライ・フオトテヒニツク・ゲ−エムベ−ハ− | 写真測量的被写体検出方法 |
| JPH04181106A (ja) * | 1990-11-15 | 1992-06-29 | Komatsu Ltd | 位置寸法計測装置のキャリブレーション装置 |
| JPH0829129A (ja) * | 1994-07-08 | 1996-02-02 | Seiken:Kk | 長さ測定装置 |
| JPH11118425A (ja) * | 1997-10-17 | 1999-04-30 | Sony Corp | キャリブレーション方法及び装置、並びにキャリブレーション用データ生成方法 |
| JP2000329523A (ja) * | 1999-05-24 | 2000-11-30 | Dainippon Screen Mfg Co Ltd | アライメントスコープの位置校正装置及びその方法 |
| JP2002280288A (ja) * | 2001-03-19 | 2002-09-27 | Nikon Corp | 較正用基準ウエハ、較正方法、位置検出方法、位置検出装置、及び露光装置 |
-
2002
- 2002-12-16 JP JP2002363181A patent/JP2004198110A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62226009A (ja) * | 1986-03-19 | 1987-10-05 | ロ−ライ・フオトテヒニツク・ゲ−エムベ−ハ− | 写真測量的被写体検出方法 |
| JPH04181106A (ja) * | 1990-11-15 | 1992-06-29 | Komatsu Ltd | 位置寸法計測装置のキャリブレーション装置 |
| JPH0829129A (ja) * | 1994-07-08 | 1996-02-02 | Seiken:Kk | 長さ測定装置 |
| JPH11118425A (ja) * | 1997-10-17 | 1999-04-30 | Sony Corp | キャリブレーション方法及び装置、並びにキャリブレーション用データ生成方法 |
| JP2000329523A (ja) * | 1999-05-24 | 2000-11-30 | Dainippon Screen Mfg Co Ltd | アライメントスコープの位置校正装置及びその方法 |
| JP2002280288A (ja) * | 2001-03-19 | 2002-09-27 | Nikon Corp | 較正用基準ウエハ、較正方法、位置検出方法、位置検出装置、及び露光装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008292259A (ja) * | 2007-05-23 | 2008-12-04 | Mitsutoyo Corp | 二次元格子校正装置、二次元格子校正方法、二次元格子校正プログラム、記録媒体 |
| JP2021031779A (ja) * | 2019-08-19 | 2021-03-01 | 株式会社Zozo | 物体上の距離を測定するための方法、システム、およびプログラム |
| JP7352408B2 (ja) | 2019-08-19 | 2023-09-28 | 株式会社Zozo | 物体上の距離を測定するための方法、システム、およびプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20020007998A (ko) | 반도체 웨이퍼의 패턴형상 평가방법 및 장치 | |
| JP3282516B2 (ja) | 三次元画像計測方法 | |
| JP3536097B2 (ja) | 周波数変調格子による格子投影形状計測方法及び装置 | |
| JP2019139030A (ja) | 3次元計測対象物体の表面に計測結果関連情報を投影する方法および装置 | |
| KR101653861B1 (ko) | 묘화 데이터 생성 방법, 묘화 방법, 묘화 데이터 생성 장치, 및 묘화 장치 | |
| JP2004198110A (ja) | 校正用基板 | |
| JP3410779B2 (ja) | 画像入力装置における移動ステージの校正方法 | |
| JPH076777B2 (ja) | パターンの輪郭検出方法及びこの方法を用いた測長装置 | |
| JP2001283194A (ja) | 回路基板の外観検査方法及び回路基板の外観検査装置 | |
| JP2009079915A (ja) | 微小寸法測定方法および測定装置 | |
| JP2569397B2 (ja) | ステレオ写真法による形状計測方法及び装置 | |
| JP4401126B2 (ja) | 寸法測定装置の所定部位登録方法 | |
| KR101647688B1 (ko) | 마스크 내 다이 크기 및 개수 자동 획득 방법 | |
| JP3508368B2 (ja) | 画像測定機 | |
| KR100543468B1 (ko) | 반도체 패턴의 거리 측정 시스템 및 거리 측정 방법 | |
| JPH10311705A (ja) | 画像入力装置 | |
| JP3446020B2 (ja) | 形状計測方法 | |
| JP2678127B2 (ja) | 光学式測定装置 | |
| JP2004333355A (ja) | 線幅の計測方法 | |
| JP4306353B2 (ja) | 画像認識装置における画素レート算出方法 | |
| CN112105487B (zh) | 用于具有位置定位系统的机器人的展演竞赛场 | |
| JP2000105167A (ja) | 画質検査装置のアドレス・キャリブレーション方法 | |
| JP3448322B2 (ja) | 画像入力装置用ccdカメラの校正方法 | |
| JP3213374B2 (ja) | 二次元測定機 | |
| JP4719348B2 (ja) | 徴小寸法測定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070906 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070912 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080124 |