JP2004202002A - 補助動力付きキック式走行具及びその制御方法 - Google Patents
補助動力付きキック式走行具及びその制御方法 Download PDFInfo
- Publication number
- JP2004202002A JP2004202002A JP2002375726A JP2002375726A JP2004202002A JP 2004202002 A JP2004202002 A JP 2004202002A JP 2002375726 A JP2002375726 A JP 2002375726A JP 2002375726 A JP2002375726 A JP 2002375726A JP 2004202002 A JP2004202002 A JP 2004202002A
- Authority
- JP
- Japan
- Prior art keywords
- speed
- kick
- auxiliary power
- traveling
- wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 7
- 230000007423 decrease Effects 0.000 claims description 13
- 230000001172 regenerating effect Effects 0.000 claims description 10
- 230000003247 decreasing effect Effects 0.000 description 8
- 238000001514 detection method Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000002485 combustion reaction Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/53—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells in combination with an external power supply, e.g. from overhead contact lines
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Motorcycle And Bicycle Frame (AREA)
Abstract
【課題】誰でも操縦が容易にでき、初心者や身障者でも安全に操縦できる補助電動機付きスケータを開発することを課題とする。
【解決手段】脚で地面をキックすることのみで走行する走工具であって、走行車輪11に補助動力装置14が設けられ、脚の蹴出し直後の最高速度Vmaxを起点として、増速はしない範囲で速度低下を遅らせる補助力を、走行車輪11に一定時間付加するように構成されている。
【選択図】 図2
【解決手段】脚で地面をキックすることのみで走行する走工具であって、走行車輪11に補助動力装置14が設けられ、脚の蹴出し直後の最高速度Vmaxを起点として、増速はしない範囲で速度低下を遅らせる補助力を、走行車輪11に一定時間付加するように構成されている。
【選択図】 図2
Description
【0001】
【発明の属する技術分野】
この発明は、補助動力付きキック式走行具及びその制御方法に関する。
【0002】
【従来の技術】
脚で地面をキックすることのみで走行する走行具、例えばハンドル操作可能な前輪を有すると共に、後端に後輪を軸支し立ち姿勢で走行できるようにしたキックスケータや、脚に装着する靴あるいは靴に装着する台板に、車輪を一列あるいは平行に四輪軸支したローラスケートなどの走行具が一般に知られている。
【0003】
またこれら走行具として、電動モーターあるいは小型内燃機関を設け自走し、さらにその速度の増減を行って操縦者の目的に応じ操縦ができるようにしたものも知られている(特許文献1,2)。
【0004】
【特許文献1】
特開2000−118469号公報
【0005】
【特許文献2】
特開2001−206269号公報
【0006】
【発明が解決しようとする課題】
ところで、これら駆動装置付きのスケータは、停止状態から自走で走り出すようにされているので、比較的大馬力の駆動装置が用いられ、また駆動源に内燃機関を使用した場合は、クラッチなどが不可欠となるので、駆動装置が大掛かりとなる問題があった。
【0007】
また、電動モーターを駆動源とする場合は大容量の電池を必要とし、電動モーターそのものは小型化できても電池に大型のものを使用せざるを得ず、走行具全体が非常に重量が嵩むといった問題があった。
【0008】
また、実際の操縦に際しても、始動、加減速、通常走行などにかなり習熟を要し、誰でも容易に操縦出来るものではない問題があった。
この発明は、上記問題を解消し、誰でも操縦が容易にでき、初心者や身障者でも安全に操縦できるコンパクトな補助電動機付きスケータを開発することを課題としてなされたものである。
【0009】
【課題を解決するための手段】
上記問題を解消するため、請求項1の発明は、補助動力付きキック式走行具に関し、脚で地面をキックすることのみで走行する走行具であって、走行車輪に補助動力装置が設けられた走行具において、脚の蹴出し直後の最高速度を起点として、増速はしない範囲で速度低下を遅らせる補助力を、前記補助動力によって一定時間前記走行車輪に付加するように構成されたことを特徴とするものである。
【0010】
即ち、脚で蹴って前進力を得る場合に、補助動力がない場合の速度低下よりも速度低下の程度を少なくし、いわゆる伸びの良い速力で惰性走行距離を補助動力によって長くするのである。そして、通常より長く走行したあと、再び足蹴りにより地面を蹴れば前記と同様伸びの良い速力で走行が継続できるのである。
【0011】
従って、例えば原動機によって継続的に走行し、その走行中に任意に速度を変化させ得るように操縦する走行具に比べ、操縦に関して熟練は全く不要で、通常の足蹴り走行と同じ操作でよいので誰でも容易に運転操縦ができる。
【0012】
請求項2の発明は、請求項1の補助動力付きキック式走行具において、脚の蹴出し時のトルクを検出し、該トルクに応じ、該トルク以下の補助力を走行車輪に付加するように構成されたものである。
【0013】
この場合、脚で蹴って前へ進もうとした力に応じたトルクが補助動力として車輪に加えられるので、例えば登り坂を走行する場合、楽に走行できる。
また、蹴った後の速度補助も行われる。
【0014】
請求項3の発明は、上記した補助動力付きキック式走行具の制御方法に関し、脚で地面をキックすることのみで走行する走行具において、足蹴り増速された走行具の最高速度を検出し、該速度に相当する駆動電圧を設定する演算回路と、該演算回路により設定された電圧を起点として、一定比率で電圧を漸減させる電圧漸減回路と、該回路により制御される電圧に従って走行車輪の駆動モーターを駆動するようにしたことを特徴とするものである。
【0015】
得られた速度に対する電圧は、その電動機の特性として把握可能であり、検出速度からこの駆動電圧を設定後、漸減する電源回路を設けるのは容易であり、従って、制御回路として簡単な構造のものでよく、実施が容易となる。
【0016】
請求項4の発明は、請求項3の補助動力付きキック式走行具の制御方法において、車輪の回転速度が一定値を超えた場合は、速度が前記一定値以下になるまで電動モーターによる回生ブレーキが加えられるように構成したことを特徴とするものである。
【0017】
危険を未然に回避するためである。例えば、下り坂に差し掛かり速度が一定以上に増加した場合、自動的に回生ブレーキが掛かり速度が制限される。
また、平地を走行する場合でも、足蹴りにより速度増加が著しく、一定以上の速度となった場合、同様に安全のために回生ブレーキにより速度が抑制される。
【0018】
なお、回生ブレーキ時に発生した電力はバッテリへ充電可能であり、エネルギの有効利用が図られる。
【0019】
【実施の形態】
図1は、この発明の実施の形態であるキック式走行具としてのキックスケータの側面図、図2は制御回路図である。
【0020】
図1において、キックスケータは、ステップボード6の前縁にアーム8を介してヘッドパイプ5が取付けられ、このへットパイプ5にハンドル軸1が軸周囲回転自在に支持されている。ハンドル軸1の下端にはホーク2を介して前輪3が軸支されている。
【0021】
またステップボード6の後端には後輪11が軸支され、ステップボード6に設けた電動モーター14と後輪11が、図の背面側になるため図示されていないが伝導ベルトにより連接されている。なお、電動モーター14の電源バッテリー10はハンドル軸1に取り付け金具10aにより取り付けられている。
【0022】
そして、この電動モーター14に隣接して制御装置20が設けられ、この制御装置20により補助電動力が後輪11に加えられるように構成されている。
なお、ハンドル軸1は、図に仮想線で示すように折畳み自在にすることもできる。この場合はアーム8のボード側取付け部がヒンジ金具9とされる。
【0023】
次に、上記した制御装置20の制御回路は図2に示すように構成されている。
後輪11に連接された電動モーター14に車速を検出する速度センサー21が設けられ、その値が次の最高速度検出回路22に出力されるようにされている。
【0024】
キックスケータの速度変化は、一般に一、二回地面を蹴って増速したあとは、ボード6上に体全体を乗せて惰性走行に移るので、増速後、惰性走行に移る時に速度のピークが存在する。
【0025】
従って、最高速度検出回路22では、逐次入力される速度センサー21よりの速度信号の変化を測定し、その変化がゼロとなる点を検出し、そのときの速度データを最高速度として、その値Vmaxを次の漸減カーブ設定回路23へと出力する。
【0026】
この漸減カーブ設定回路23は、惰性走行における最高速度から次第に速度が減少していく際の望ましい速度低下の変化率を予めサンプリングなどで得、これをモデル化した速度減少の漸減カーブモデルが設定されている。そして、入力された最高速度値Vmaxが、このカーブの起点値として漸減カーブのモデルが直ちに設定され、これが速度指令回路24へと入力される。
【0027】
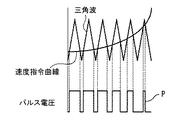
この速度指令回路24では、漸減カーブのモデル曲線が変換され、その速度指令電圧が電圧比較器25へ入力されると共に、三角波発信機26からは三角波が入力される。
【0028】
電圧比較器25では、これら電圧の比較がされ、図3に示すようにプラス側の幅に応じた時間長さのパルスpが発生される。
なお、このパルスは時間が経過するにつれて次第に幅が少なくなるようなパルスとなる。
【0029】
そして、このパルスpは、ゲートドライブ26で増幅されてスイッチング素子27例えばN型パワーMOS FETなどからなるスイッチング素子へと送られ、そのパルス幅に比例した電圧が電動モーター14へと供給される。従って、電動モーター14はその電圧に応じた駆動力で後輪を駆動する。
【0030】
なお、この駆動力はスケータを増速させるのではなく、速度低下の低減率を小さくするだけのものであるので、スケータは、電動モーター14が駆動されても増速することなく緩徐に速度を低下させていく。
【0031】
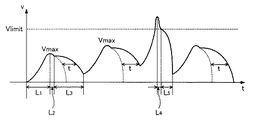
この速度変化は、図4に示すような曲線となる。すなわち、脚蹴りにより増速する範囲L1の後、ボード上に脚を載せ惰性走行に移ると、直ちに速度のピークVmaxを迎える。その後漸減速度設定のためのわずかな間の自然な速度低下期間L2を経た後に、漸減カーブ設定回路23に基づいて駆動される電動モーター14の補助力により、漸減カーブ曲線L3を描いて速度が低下していく。なお、図4における範囲L2は説明のために幅を大きく強調して示されているが、実際はもっと短い時間幅となる。
【0032】
従って、速度のピークVmaxを過ぎたあと、わずかな時間遅れで漸減カーブに沿った速度低下抑制の制御が作動し、自然な速度低下期間L2の延長である点線で示すような本来の速度低下曲線に比べて、tで示す時間差だけ、より緩やかな速度低下曲線を描いて速度が漸減していく。
【0033】
従って、一蹴りで従来では得られなかった、長い惰性走行距離が得られるのである。
これを繰り返すことにより、図4の時間増加軸に従って、走行を継続していくのである。
【0034】
なお、速度が制限速度、例えば時速15キロメートル以上になると危険なので、その速度に至れば、最高速度検出回路22より作動信号が切り替えられて回生ブレーキ回路26へ送られ、電動モーター14により回生ブレーキが後輪11に加えられる。この範囲が図4の範囲L4の部分である。
【0035】
なお、一定速度以下となれば回生ブレーキが解除され、この場合は範囲L5で示すように補助動力が作用することなく速度が低下するが、それ以後は再び、足蹴りによる増速、補助動力による前述した作動が可能となる。
【0036】
なお、スケータが下り坂などで速度が増し、そのために制限速度を超えた場合は、回生ブレーキが作動しつづけ、この結果図5に示したように、下り坂を降りきるまでの区間L6の間は制限速度を維持したまま下り坂を下ることとなる。なお、平地に移れば図4に示した符号と同一符号で示すように先に説明したのと同じ走行となる。
【0037】
なお、上記下り坂での回生ブレーキにより生じた起電力をバッテリに供給して充電することもできる。
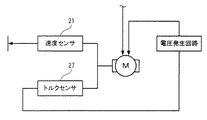
また、上記の実施の形態において、図6に示すように、速度センサー21に、トルクセンサー27をさらに設け、得られたトルクに比例する電圧を電動モーター14に加え、増速させない範囲で足蹴り時の力をアシストするような構成とすることもできる。
【0038】
この場合、例えば登り坂を足蹴りで登る場合、少ない力で登り坂を進むことができる。
なお、上記実施の形態としてキックスケータに適用した場合を主に説明したが、靴あるいは靴の底にあてがわれる基板に一列にあるいは並列に車輪を設けたローラースケートについても同様に実施できる。
【0039】
なお、この場合の補助電動モーターの電源バッテリは、使用者に携帯される。
【0040】
【発明の効果】
この発明は、以上説明したように、請求項1の発明によれば、地面をキックすることで走行する走行具の、惰性走行が補助電動機で増速しない範囲で補助されるので、長距離を楽に走行でき、しかも飽くまで増速はしないので、自動走行するような運転に対する熟練も不要で、初心者であっても容易に安全運転が可能となる。
【0041】
請求項2の発明によれば、脚で蹴って前へ進もうとした力に応じたトルクが補助動力として車輪に加えられるので、例えば坂道などを登り走行する場合、楽に走行できる。
【0042】
請求項3の発明によれば、簡単な装置で補助動力付きキック式走行具が製造でき、安価に提供できる。
請求項4の発明によれば、下り坂などで増速しやすい場所での安全速度が維持でき、しかも起電力をバッテリに充電できるのでエネルギも有効に利用できる効果を有する。
【図面の簡単な説明】
【図1】この発明の実施の形態である補助動力付きキックスケートの側面図である。
【図2】補助動力付きキック式走行具の制御回路の説明図である。
【図3】補助動力の指令パルスの説明図である。
【図4】この発明の実施の形態である補助動力付きキックスケートの走行曲線である。
【図5】この発明の実施の形態である補助動力付きキックスケートの他の走行曲線である。
【図6】トルク検知を行う場合の説明図である。
【符号の説明】
1 ハンドル軸
2 前輪フォーク
3 前輪
5 ヘッドパイプ
11 後輪
14 電動モーター
20 制御回路
【発明の属する技術分野】
この発明は、補助動力付きキック式走行具及びその制御方法に関する。
【0002】
【従来の技術】
脚で地面をキックすることのみで走行する走行具、例えばハンドル操作可能な前輪を有すると共に、後端に後輪を軸支し立ち姿勢で走行できるようにしたキックスケータや、脚に装着する靴あるいは靴に装着する台板に、車輪を一列あるいは平行に四輪軸支したローラスケートなどの走行具が一般に知られている。
【0003】
またこれら走行具として、電動モーターあるいは小型内燃機関を設け自走し、さらにその速度の増減を行って操縦者の目的に応じ操縦ができるようにしたものも知られている(特許文献1,2)。
【0004】
【特許文献1】
特開2000−118469号公報
【0005】
【特許文献2】
特開2001−206269号公報
【0006】
【発明が解決しようとする課題】
ところで、これら駆動装置付きのスケータは、停止状態から自走で走り出すようにされているので、比較的大馬力の駆動装置が用いられ、また駆動源に内燃機関を使用した場合は、クラッチなどが不可欠となるので、駆動装置が大掛かりとなる問題があった。
【0007】
また、電動モーターを駆動源とする場合は大容量の電池を必要とし、電動モーターそのものは小型化できても電池に大型のものを使用せざるを得ず、走行具全体が非常に重量が嵩むといった問題があった。
【0008】
また、実際の操縦に際しても、始動、加減速、通常走行などにかなり習熟を要し、誰でも容易に操縦出来るものではない問題があった。
この発明は、上記問題を解消し、誰でも操縦が容易にでき、初心者や身障者でも安全に操縦できるコンパクトな補助電動機付きスケータを開発することを課題としてなされたものである。
【0009】
【課題を解決するための手段】
上記問題を解消するため、請求項1の発明は、補助動力付きキック式走行具に関し、脚で地面をキックすることのみで走行する走行具であって、走行車輪に補助動力装置が設けられた走行具において、脚の蹴出し直後の最高速度を起点として、増速はしない範囲で速度低下を遅らせる補助力を、前記補助動力によって一定時間前記走行車輪に付加するように構成されたことを特徴とするものである。
【0010】
即ち、脚で蹴って前進力を得る場合に、補助動力がない場合の速度低下よりも速度低下の程度を少なくし、いわゆる伸びの良い速力で惰性走行距離を補助動力によって長くするのである。そして、通常より長く走行したあと、再び足蹴りにより地面を蹴れば前記と同様伸びの良い速力で走行が継続できるのである。
【0011】
従って、例えば原動機によって継続的に走行し、その走行中に任意に速度を変化させ得るように操縦する走行具に比べ、操縦に関して熟練は全く不要で、通常の足蹴り走行と同じ操作でよいので誰でも容易に運転操縦ができる。
【0012】
請求項2の発明は、請求項1の補助動力付きキック式走行具において、脚の蹴出し時のトルクを検出し、該トルクに応じ、該トルク以下の補助力を走行車輪に付加するように構成されたものである。
【0013】
この場合、脚で蹴って前へ進もうとした力に応じたトルクが補助動力として車輪に加えられるので、例えば登り坂を走行する場合、楽に走行できる。
また、蹴った後の速度補助も行われる。
【0014】
請求項3の発明は、上記した補助動力付きキック式走行具の制御方法に関し、脚で地面をキックすることのみで走行する走行具において、足蹴り増速された走行具の最高速度を検出し、該速度に相当する駆動電圧を設定する演算回路と、該演算回路により設定された電圧を起点として、一定比率で電圧を漸減させる電圧漸減回路と、該回路により制御される電圧に従って走行車輪の駆動モーターを駆動するようにしたことを特徴とするものである。
【0015】
得られた速度に対する電圧は、その電動機の特性として把握可能であり、検出速度からこの駆動電圧を設定後、漸減する電源回路を設けるのは容易であり、従って、制御回路として簡単な構造のものでよく、実施が容易となる。
【0016】
請求項4の発明は、請求項3の補助動力付きキック式走行具の制御方法において、車輪の回転速度が一定値を超えた場合は、速度が前記一定値以下になるまで電動モーターによる回生ブレーキが加えられるように構成したことを特徴とするものである。
【0017】
危険を未然に回避するためである。例えば、下り坂に差し掛かり速度が一定以上に増加した場合、自動的に回生ブレーキが掛かり速度が制限される。
また、平地を走行する場合でも、足蹴りにより速度増加が著しく、一定以上の速度となった場合、同様に安全のために回生ブレーキにより速度が抑制される。
【0018】
なお、回生ブレーキ時に発生した電力はバッテリへ充電可能であり、エネルギの有効利用が図られる。
【0019】
【実施の形態】
図1は、この発明の実施の形態であるキック式走行具としてのキックスケータの側面図、図2は制御回路図である。
【0020】
図1において、キックスケータは、ステップボード6の前縁にアーム8を介してヘッドパイプ5が取付けられ、このへットパイプ5にハンドル軸1が軸周囲回転自在に支持されている。ハンドル軸1の下端にはホーク2を介して前輪3が軸支されている。
【0021】
またステップボード6の後端には後輪11が軸支され、ステップボード6に設けた電動モーター14と後輪11が、図の背面側になるため図示されていないが伝導ベルトにより連接されている。なお、電動モーター14の電源バッテリー10はハンドル軸1に取り付け金具10aにより取り付けられている。
【0022】
そして、この電動モーター14に隣接して制御装置20が設けられ、この制御装置20により補助電動力が後輪11に加えられるように構成されている。
なお、ハンドル軸1は、図に仮想線で示すように折畳み自在にすることもできる。この場合はアーム8のボード側取付け部がヒンジ金具9とされる。
【0023】
次に、上記した制御装置20の制御回路は図2に示すように構成されている。
後輪11に連接された電動モーター14に車速を検出する速度センサー21が設けられ、その値が次の最高速度検出回路22に出力されるようにされている。
【0024】
キックスケータの速度変化は、一般に一、二回地面を蹴って増速したあとは、ボード6上に体全体を乗せて惰性走行に移るので、増速後、惰性走行に移る時に速度のピークが存在する。
【0025】
従って、最高速度検出回路22では、逐次入力される速度センサー21よりの速度信号の変化を測定し、その変化がゼロとなる点を検出し、そのときの速度データを最高速度として、その値Vmaxを次の漸減カーブ設定回路23へと出力する。
【0026】
この漸減カーブ設定回路23は、惰性走行における最高速度から次第に速度が減少していく際の望ましい速度低下の変化率を予めサンプリングなどで得、これをモデル化した速度減少の漸減カーブモデルが設定されている。そして、入力された最高速度値Vmaxが、このカーブの起点値として漸減カーブのモデルが直ちに設定され、これが速度指令回路24へと入力される。
【0027】
この速度指令回路24では、漸減カーブのモデル曲線が変換され、その速度指令電圧が電圧比較器25へ入力されると共に、三角波発信機26からは三角波が入力される。
【0028】
電圧比較器25では、これら電圧の比較がされ、図3に示すようにプラス側の幅に応じた時間長さのパルスpが発生される。
なお、このパルスは時間が経過するにつれて次第に幅が少なくなるようなパルスとなる。
【0029】
そして、このパルスpは、ゲートドライブ26で増幅されてスイッチング素子27例えばN型パワーMOS FETなどからなるスイッチング素子へと送られ、そのパルス幅に比例した電圧が電動モーター14へと供給される。従って、電動モーター14はその電圧に応じた駆動力で後輪を駆動する。
【0030】
なお、この駆動力はスケータを増速させるのではなく、速度低下の低減率を小さくするだけのものであるので、スケータは、電動モーター14が駆動されても増速することなく緩徐に速度を低下させていく。
【0031】
この速度変化は、図4に示すような曲線となる。すなわち、脚蹴りにより増速する範囲L1の後、ボード上に脚を載せ惰性走行に移ると、直ちに速度のピークVmaxを迎える。その後漸減速度設定のためのわずかな間の自然な速度低下期間L2を経た後に、漸減カーブ設定回路23に基づいて駆動される電動モーター14の補助力により、漸減カーブ曲線L3を描いて速度が低下していく。なお、図4における範囲L2は説明のために幅を大きく強調して示されているが、実際はもっと短い時間幅となる。
【0032】
従って、速度のピークVmaxを過ぎたあと、わずかな時間遅れで漸減カーブに沿った速度低下抑制の制御が作動し、自然な速度低下期間L2の延長である点線で示すような本来の速度低下曲線に比べて、tで示す時間差だけ、より緩やかな速度低下曲線を描いて速度が漸減していく。
【0033】
従って、一蹴りで従来では得られなかった、長い惰性走行距離が得られるのである。
これを繰り返すことにより、図4の時間増加軸に従って、走行を継続していくのである。
【0034】
なお、速度が制限速度、例えば時速15キロメートル以上になると危険なので、その速度に至れば、最高速度検出回路22より作動信号が切り替えられて回生ブレーキ回路26へ送られ、電動モーター14により回生ブレーキが後輪11に加えられる。この範囲が図4の範囲L4の部分である。
【0035】
なお、一定速度以下となれば回生ブレーキが解除され、この場合は範囲L5で示すように補助動力が作用することなく速度が低下するが、それ以後は再び、足蹴りによる増速、補助動力による前述した作動が可能となる。
【0036】
なお、スケータが下り坂などで速度が増し、そのために制限速度を超えた場合は、回生ブレーキが作動しつづけ、この結果図5に示したように、下り坂を降りきるまでの区間L6の間は制限速度を維持したまま下り坂を下ることとなる。なお、平地に移れば図4に示した符号と同一符号で示すように先に説明したのと同じ走行となる。
【0037】
なお、上記下り坂での回生ブレーキにより生じた起電力をバッテリに供給して充電することもできる。
また、上記の実施の形態において、図6に示すように、速度センサー21に、トルクセンサー27をさらに設け、得られたトルクに比例する電圧を電動モーター14に加え、増速させない範囲で足蹴り時の力をアシストするような構成とすることもできる。
【0038】
この場合、例えば登り坂を足蹴りで登る場合、少ない力で登り坂を進むことができる。
なお、上記実施の形態としてキックスケータに適用した場合を主に説明したが、靴あるいは靴の底にあてがわれる基板に一列にあるいは並列に車輪を設けたローラースケートについても同様に実施できる。
【0039】
なお、この場合の補助電動モーターの電源バッテリは、使用者に携帯される。
【0040】
【発明の効果】
この発明は、以上説明したように、請求項1の発明によれば、地面をキックすることで走行する走行具の、惰性走行が補助電動機で増速しない範囲で補助されるので、長距離を楽に走行でき、しかも飽くまで増速はしないので、自動走行するような運転に対する熟練も不要で、初心者であっても容易に安全運転が可能となる。
【0041】
請求項2の発明によれば、脚で蹴って前へ進もうとした力に応じたトルクが補助動力として車輪に加えられるので、例えば坂道などを登り走行する場合、楽に走行できる。
【0042】
請求項3の発明によれば、簡単な装置で補助動力付きキック式走行具が製造でき、安価に提供できる。
請求項4の発明によれば、下り坂などで増速しやすい場所での安全速度が維持でき、しかも起電力をバッテリに充電できるのでエネルギも有効に利用できる効果を有する。
【図面の簡単な説明】
【図1】この発明の実施の形態である補助動力付きキックスケートの側面図である。
【図2】補助動力付きキック式走行具の制御回路の説明図である。
【図3】補助動力の指令パルスの説明図である。
【図4】この発明の実施の形態である補助動力付きキックスケートの走行曲線である。
【図5】この発明の実施の形態である補助動力付きキックスケートの他の走行曲線である。
【図6】トルク検知を行う場合の説明図である。
【符号の説明】
1 ハンドル軸
2 前輪フォーク
3 前輪
5 ヘッドパイプ
11 後輪
14 電動モーター
20 制御回路
Claims (4)
- 脚で地面をキックすることのみで走行する走行具であって、走行車輪に補助動力装置が設けられ、該補助動力装置によって、脚の蹴出し直後の最高速度を起点として、増速しない範囲で速度低下を遅らせる補助力が、前記走行車輪に付加されるように構成されたことを特徴とする補助動力付きキック式走行具。
- 請求項1の補助動力付きキック式走行具において、脚の蹴出し時に生じる車輪のトルクを検出し、該トルクに応じ、該トルク以下の補助力を走行車輪に付加するように構成された補助動力付きキック式走行具。
- 脚で地面をキックすることのみで走行する走行具において、足蹴り増速された走行具の最高速度を検出し、該速度に相当する駆動電圧を起点として該速度から一定比率で漸減する速度を設定する回路と、該回路により制御される電圧に従って走行車輪の駆動モーターを駆動するようにしたことを特徴とする補助動力付きキック式走行具の制御方法。
- 請求項3の補助動力付きキック式走行具の制御方法において、車輪の回転速度が一定値を超えた場合は、速度が前記一定値以下になるまで電動モーターによる回生ブレーキが加えられるように構成したことを特徴とする補助動力付きキック式走行具の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002375726A JP2004202002A (ja) | 2002-12-26 | 2002-12-26 | 補助動力付きキック式走行具及びその制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002375726A JP2004202002A (ja) | 2002-12-26 | 2002-12-26 | 補助動力付きキック式走行具及びその制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004202002A true JP2004202002A (ja) | 2004-07-22 |
Family
ID=32813367
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002375726A Pending JP2004202002A (ja) | 2002-12-26 | 2002-12-26 | 補助動力付きキック式走行具及びその制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004202002A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011235679A (ja) * | 2010-05-06 | 2011-11-24 | Tokyo R & D Co Ltd | 電動アシスト自転車 |
| EP2724924A1 (en) * | 2012-10-29 | 2014-04-30 | Taiyo Yuden Co., Ltd. | Motor drive controller and electric power-assisted vehicle |
| US9136780B2 (en) | 2012-09-24 | 2015-09-15 | Taiyo Yuden Co., Ltd. | Controller for driving a motor and electric power-assisted vehicle |
| WO2019216170A1 (ja) * | 2018-05-07 | 2019-11-14 | ソニー株式会社 | 制御装置、制御方法、プログラム、及び移動体 |
-
2002
- 2002-12-26 JP JP2002375726A patent/JP2004202002A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011235679A (ja) * | 2010-05-06 | 2011-11-24 | Tokyo R & D Co Ltd | 電動アシスト自転車 |
| US9136780B2 (en) | 2012-09-24 | 2015-09-15 | Taiyo Yuden Co., Ltd. | Controller for driving a motor and electric power-assisted vehicle |
| EP2724924A1 (en) * | 2012-10-29 | 2014-04-30 | Taiyo Yuden Co., Ltd. | Motor drive controller and electric power-assisted vehicle |
| US8725340B1 (en) | 2012-10-29 | 2014-05-13 | Taiyo Yuden Co., Ltd. | Motor drive controller and electric power-assisted vehicle |
| WO2019216170A1 (ja) * | 2018-05-07 | 2019-11-14 | ソニー株式会社 | 制御装置、制御方法、プログラム、及び移動体 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI584993B (zh) | 馬達驅動式滑板車 | |
| US10800484B2 (en) | Scooter, control device and controlling method | |
| CN112740893B (zh) | 骑乘式割草机 | |
| US9834277B2 (en) | Method and device for controlling a pedal-operated vehicle | |
| US11793705B2 (en) | Fall-resistant method of intelligent rollator, intelligent rollator and controller thereof | |
| CN106103182A (zh) | 车辆控制装置及车辆控制方法 | |
| JP2010125221A (ja) | 移動体 | |
| NO327443B1 (no) | Elektrisk kjoretoy | |
| TW201908194A (zh) | 電動載具及電動載具動力啟閉方法 | |
| WO2019189285A1 (ja) | モータ制御装置及び電動アシスト車 | |
| US20030085677A1 (en) | Electric vehicle | |
| JP2007116860A (ja) | 車両駆動装置 | |
| JP2004202002A (ja) | 補助動力付きキック式走行具及びその制御方法 | |
| CN207611242U (zh) | 智能推车 | |
| CN205469227U (zh) | 儿童推车 | |
| JP6308611B2 (ja) | 蹴りだし検出による歩行補助車両 | |
| JP2004243921A (ja) | 電動補助車両の補助力制御装置 | |
| JP6970535B2 (ja) | 電動機付自転車 | |
| US20230303214A1 (en) | Electric vehicle | |
| JPH07132874A (ja) | ペダル付き電動車輌 | |
| JP2002271916A (ja) | 車両用モータ駆動制御方法 | |
| JP2015050836A (ja) | 歩行アシスト移動体 | |
| TWM624642U (zh) | 兩輪車之定速巡航裝置 | |
| TW201134696A (en) | Electric motorcycle with mutual transmission control between electric motor and wheels | |
| CN113911242A (zh) | 一种电动助力车及控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080219 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080617 |