JP2004203514A - 農産物評価システム - Google Patents
農産物評価システム Download PDFInfo
- Publication number
- JP2004203514A JP2004203514A JP2002371654A JP2002371654A JP2004203514A JP 2004203514 A JP2004203514 A JP 2004203514A JP 2002371654 A JP2002371654 A JP 2002371654A JP 2002371654 A JP2002371654 A JP 2002371654A JP 2004203514 A JP2004203514 A JP 2004203514A
- Authority
- JP
- Japan
- Prior art keywords
- information
- agricultural product
- unit
- agricultural
- production
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
【課題】小規模農場における情報管理及び生産・流通・消費における農産物のトレーサビリティに適した農産物評価システムを提供する。
【解決手段】農産物評価システム1を構成する栽培管理装置10の栽培情報及び土壌測定装置20の土壌情報、農産物収穫装置30の収穫情報と、品質評価装置40による農産物Dの判定情報とを、生産・流通・消費において階層的に関連付けて情報管理装置60により一括管理すると共に、その関連する情報を、生産・流通・消費における農産物のトレーサビリティに適用し、必要とする情報を階層的に関連付けて出力する。
【選択図】 図1
【解決手段】農産物評価システム1を構成する栽培管理装置10の栽培情報及び土壌測定装置20の土壌情報、農産物収穫装置30の収穫情報と、品質評価装置40による農産物Dの判定情報とを、生産・流通・消費において階層的に関連付けて情報管理装置60により一括管理すると共に、その関連する情報を、生産・流通・消費における農産物のトレーサビリティに適用し、必要とする情報を階層的に関連付けて出力する。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
この発明は、例えば小規模農場における情報管理及び生産・流通・消費における農産物のトレーサビリティに用いられる農産物評価システムに関する。
【0002】
【従来の技術】
従来、上述の農産物に関する情報を管理する方法としては、例えば作物収穫機の作物品質計測手段で計測した作物の品質計測情報を、情報出力手段から計測情報収集手段に出力して、計測情報収集手段で収集した各収穫場所に対応する作物の品質計測情報と、その品質計測情報に基づいて、品質マップ作成手段で作成した各収穫場所に対応する作物の地域毎の品質マップと、生産管理情報作成手段で求めた生産者毎の作物の生産管理情報とを出力する特許文献1の作物情報管理システムがある。
【0003】
【特許文献1】
特開平11−53674号公報。
【0004】
【発明が解決しようとする課題】
しかし、上述の作物情報管理システムは、一つの収穫場所における品質のバラツキ及び収穫場所の違いによる品質のバラツキを管理するが、その他の情報、例えば圃場が存在する地域や生産地及び農家間の営農形態や規模、動機等の情報を管理することができない。且つ、大規模農場の場合、栽培作物が単一作物であるケースが多く、圃場内のバラツキのみが管理すべき情報であるので、上述のような作物情報管理システムにより品質のバラツキを管理することができるが、小規模農場の場合、例えば水田や野菜畑、果樹園或いは住居等が一つの農場に含まれるだけでなく、多数の農家が一つの農地を所有及び耕作利用しており、農家間の経営形態や規模、動機、意思が様々である。つまり、圃場内の用途的バラツキのみならず、圃場間の地域的バラツキ及び農家間の営農形態バラツキが同時に存在するため、管理すべき情報が多く、情報管理が難しいという問題点を有している。
【0005】
この発明は上記問題に鑑み、生産情報取得手段の生産情報及び農産物収穫手段の収穫情報、農産物評価手段の判定情報を階層的に関連付けて情報管理手段で一括管理することにより、小規模農場における情報管理及び生産・流通・消費における農産物のトレーサビリティに適用することができる農産物評価システムの提供を目的とする。
【0006】
【課題を解決するための手段】
この発明は、農産物の生産に関する生産情報を取得する生産情報取得手段と、上記生産情報取得手段が取得する生産情報と対応して、上記農産物を収穫する農産物収穫手段と、上記農産物収穫手段が収穫した農産物の所定項目を評価及び判定する農産物評価手段と、上記生産情報取得手段及び農産物収穫手段、農産物評価手段から出力される情報を階層的に関連付けて一括管理する情報管理手段とを備えた農産物評価システムであることを特徴とする。
【0007】
上述の農産物は、例えば穀類や野菜、果物、お茶、畜産物等で構成される。また、生産情報取得手段は、例えば農産物を栽培及び管理する栽培管理装置、圃場の土壌を測定する土壌測定装置等で構成することができる。また、農産物収穫手段は、例えば農産物を保持する吸着子やアーム、チャック等の保持手段及びその保持手段を備えた収穫ロボットや農産物収穫装置等の機械的作業、人為的な収穫作業等で構成することができる。また、農産物評価手段(例えば品質評価装置)は、例えばモノクロ又はカラーの撮像カメラやビデオカメラ、ディジタルカメラ、画像素子等の光学的な項目計測手段と、例えばパーソナルコンピューターやホストコンピューター、サーバー或いはCPU及びROM、RAMを備えた制御装置等の項目判定手段(例えば項目判定装置)及び情報管理手段(例えば情報管理装置)で構成することができる。
【0008】
つまり、農産物評価システムを構成する生産情報取得手段が取得する農産物の生産に関する生産情報と対応して、例えば圃場や施設等で栽培及び生産される農産物を農産物収穫手段で収穫し、農産物収穫手段が収穫した農産物の所定項目を農産物評価手段で評価及び判定する。且つ、生産情報取得手段及び農産物収穫手段、農産物評価手段から出力される情報を、生産・流通・消費において階層的に関連付けて情報管理手段で一括管理すると共に、その関連する情報を、生産・流通・消費における農産物のトレーサビリティに適用し、必要とする情報を階層的に関連付けて出力する。
【0009】
実施の形態として、上記農産物評価手段を、上記農産物を生産する生産部及び該農産物を流通する流通部、該農産物を消費する流通部に備えることができる。また、上記生産情報取得手段を、上記農産物の栽培に関する情報を取得する栽培情報取得手段(例えば農産物と対応する識別情報を検出する識別センサー、生産情報(例えば気象情報、土壌情報、栽培情報等)を検出及び測定する栽培センサー、各センサーの情報を管理する栽培管理装置等)と、該農産物が栽培される圃場の土壌を測定する土壌情報取得手段(例えば国際公開第01/04627号パンフレットに開示される自走式の土壌測定装置、既に公知の測定装置等)とで構成することができる。また、上記農産物評価手段を、上記農産物の所定項目を計測する項目計測手段と、該項目計測手段から出力される計測情報に基づいて、上記農産物の所定項目を評価及び判定する項目判定手段とで構成することができる。
【0010】
【作用及び効果】
この発明によれば、生産情報取得手段の生産情報及び農産物収穫手段の収穫情報、農作物評価手段の判定情報を階層的に関連付けて情報管理手段により一括管理するので、例えば栽培場所や栽培方法、農薬・肥料の散布量、所定項目(例えば等階級)等の農産物に関する詳細な情報を、生産・流通・消費において正確且つ確実に把握することができ、同一の農産物を栽培するときの参考及び改善に活用して、収益性の向上を図ることができる。且つ、不良品及び規格外の農産物が発見された場合、その発生場所及び発生原因、産地、生産者等を、情報管理手段に記憶された情報経路をさかのぼって確実に究明することができ、小規模農場における情報管理及び生産・流通・消費における農産物のトレーサビリティに最適である。
【0011】
【実施例】
この発明の一実施例を以下図面に基づいて詳述する。
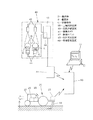
図面は農産物の評価情報を、生産・流通・消費において階層的に関連付けて管理する農産物評価システムを示し、図1に於いて、この農産物評価システム1は、農産物Dを圃場A及び施設Bで栽培する生産部a(営農部)と、農産物Dの品質を評価及び判定する評価部bと、農産物Dを輸送及び流通する流通部cと、農産物Dを販売及び消費する消費部dとを一括管理するシステムである。
【0012】
上述の生産部aは、農産物Dを栽培及び管理する栽培管理装置10と、圃場Aの土壌項目を測定する土壌測定装置20と、圃場A及び施設Bで栽培される農産物Dを収穫する農産物収穫装置30とで構成される。
【0013】
上述の栽培管理装置10は、農産物Dを栽培する栽培場所、例えば圃場Aや施設B等に備えられ、農産物D毎及び農産物D群毎に設定した識別情報を識別センサー11で検出し、その識別情報と対応させて、例えば温度や湿度、日射量、降水量等の気象情報、土質やNPK、pH、EC、有機物、温度、水分量等の土壌情報、品種や施肥、潅水、農薬、土作り、移植、定植、剪定、摘果、摘芯、農作業記録等の栽培情報(図8参照)を栽培センサー12で検出及び測定する。
【0014】
また、例えば育苗や挿し木、鉢上げ、移植、接木、施肥、田植、農薬散布、潅水、調整・加工等を機械的に行う管理装置及びロボットを備えることもできる。
【0015】
且つ、栽培センサー12で検出及び測定した情報を、農産物D及び農産物D群の識別情報と対応して後述する情報管理装置60に記憶する。また、栽培管理装置10に接続された情報通信装置13は、上述の各情報を、通信回線及びネットワークを介して、情報管理装置60に送信及び記憶する。或いは、農産物D及び農産物D群に付設した記録媒体Gに情報通信装置14を対峙して、上述の各情報を読取り可能に記録するか、上述の各情報を、情報端末装置15で入力することもできる。
【0016】
前述の土壌測定装置20は、図2、図3にも示すように、GPS機能を備えた自走式の走行車21に搭載され、圃場A内の土壌を矢印方向に走行移動するとき、GPSが検出する位置情報と対応して、例えば土壌の性質や形状、面積、土壌肥沃量、土壌水分量、含有成分量、農薬散布量、雑草の分布等の土壌情報を土壌センサー22で検出及び測定する。また、一つの圃場A内に含まれる圃場内バラツキ情報、例えば水田や野菜畑、果樹園或いは住居等を検出及び入力してもよい。
【0017】
且つ、土壌測定装置20に接続された情報通信装置23は、上述の各情報を、通信回線及びネットワークを介して、情報管理装置60に送信及び記憶する。また、土壌測定装置20を、例えば手動で移動させて土壌測定することもできる。
【0018】
且つ、作業者の手及び収穫機で収穫する農産物Dの生育状態を測定する作物生育測定装置25と、病害虫の分布及び有無を測定する病害虫測定装置26とを走行車21に搭載し、一つの圃場A内で収穫される農産物Dの収穫量を計測する収量測定装置24を、走行車21又は31に搭載或いは後述する項目判定装置43に内蔵している。また、上述の各情報を、情報端末装置27で入力することもできる。
【0019】
前述の農産物収穫装置30は、図4、図5にも示すように、GPS機能を備えた自走式の走行車31に搭載され、圃場A内の土壌を矢印方向に走行移動するとき、後述する収穫ロボット32の収穫動作と対応して、その農産物Dの収穫位置や収穫場所、樹木の位置、栽培位置、三次元位置等の情報(図8参照)をGPSで検出する。また、その位置及び場所、樹木等を特定するのに必要な情報を情報端末装置35で入力することもできる。
【0020】
且つ、上述の収穫ロボット32は、例えば吸着子やチャック、アーム等を備えたマニピュレータ又は収穫機で構成され、圃場Aで栽培される農産物D或いは樹木に実った農産物D、施設Bで栽培される農産物D等を、1個ずつ収穫及び複数を一括して収穫し、記録媒体Gが付設された載置体Eに載置する。或いは、コンテナや箱等の容器Fに整列して複数収容するか、袋体に袋詰めすることもできる。また、記録媒体Gを、載置体Eに載置又は容器Fに収容される農産物D自体に付設してもよい。
【0021】
且つ、農産物収穫装置30に接続された一方の情報通信装置33は、上述の各情報を、通信回線及びネットワークを介して、情報管理装置60に送信及び記憶する。他方の情報通信装置34は、農産物D及び載置体E、容器Fに付設した記録媒体Gに対峙され、上述の収穫ロボット32の収穫動作と対応して、農産物Dの収穫位置や収穫場所、樹木の位置、栽培位置等を記録媒体Gに記録及び読取る。
【0022】
前述の評価部bは、生産部a及び流通部cの間に配設され、農産物Dの品質を評価及び判定する品質評価装置40と、農産物Dを項目別に仕分け処理する仕分け装置50と、装置10〜50の処理情報を一括管理する情報管理装置60とで構成される。
【0023】
上述の品質評価装置40は、図2、図6にも示すように、前述の農産物収穫装置30により収穫(又は作業者の手で収穫)した農産物Dを後述する移載ロボット42で移載する動作途中及び移載動作の前後において、農産物Dの外部項目及び内部項目を撮像カメラ41で撮像する。例えば生産部aにおいて載置体Eに載置及び容器Fに収容された農産物Dを、移載ロボット42で保持して評価部bの載置体Eに載置及び容器Fに収容する移載途中において、撮像カメラ41の向きを変更(例えば略90度)するか、農産物Dを回転(例えば略270度)する等して、農産物D下面及び側面全周を撮像カメラ41で撮像する。
【0024】
且つ、乗換え前又は乗換え後において、載置体Eに載置及び容器Fに収容された農産物D上面を撮像カメラ41で撮像する。農産物D内部を透過した検出光を撮像する等して取得した画像情報と、予め記憶された基準情報とを項目判定装置43で比較及び演算して、農産物D全体の品質(例えば色相や損傷、病気、成熟度、大きさ、形状、高さ、幅、体積、偏平度、腐り具合、浮き皮具合、空洞、糖酸度、等階級、規格外、残留農薬、成分分析等の所定項目、図8参照)を個々に評価及び判定し、その判定情報(及び農協、共同選果施設の名前)を情報管理装置60に出力する。また、農産物Dの上面及び鏡面体が反射する農産物Dの側面全周を一つの撮像カメラで撮像することもできる。なお、移載ロボット42は、前述の収穫ロボット32と略同一の構成であるのでその詳細な説明を省略する。
【0025】
且つ、品質評価装置40に接続された情報通信装置44は、農産物D及び載置体E、容器Fに付設した記録媒体Gに対峙され、上述の撮像カメラ41による撮像動作と対応して、農産物D及び載置体Eに付設した記録媒体Gの識別情報を読取ると共に、上述の収量情報及び識別情報は、品質評価装置40の判定情報と対応させて情報管理装置60に出力及び判定情報と対応させて記録媒体Gに記録する。また、上述の各情報を、情報端末装置45で入力することもできる。
【0026】
前述の仕分け装置50は、上述の品質評価装置40から供給される農産物D及び載置体E、容器Fに付設した記録媒体Gに情報通信装置51を対峙して、その記録媒体Gに記録された判定情報を読取るか、記録媒体Gに記録された識別情報と対応する判定情報を情報管理装置60から読出しする等して、その識別情報及び判定情報に基づいて、農産物Dが載置された載置体E及び収容された容器Fを仕分け部52…に対して項目別に仕分け処理し、仕分け部52に仕分けられた農産物D…を、人為的作業及び機械的作業により箱詰め処理及び袋詰め処理して流通部cに出荷する。或いは、貯蔵及び保管する保管部(図示省略)に出荷する。
【0027】
且つ、仕分け情報を、上述の識別情報と対応させて情報管理装置60に出力する。また、仕分け時に生じる農産物Dの残渣は、例えば残渣処理装置や残渣処理ロボット等により機械的に処理する。
【0028】
前述の情報管理装置60は、前述の栽培管理装置10から出力される気象情報及び土壌情報、栽培情報と、土壌測定装置20から出力される圃場A内の位置情報及び土壌情報と、農産物収穫装置30から出力される収穫情報と、品質評価装置40から出力される識別情報及び判定情報と、仕分け装置50から出力される仕分け情報とを階層的に関連付けて一括管理する。且つ、上述の栽培や土壌、収穫、判定等の情報に基づいて、圃場内及び圃場間、生産者間におけるマップを作成し、読出し可能に記憶する。
【0029】
且つ、生産部a及び流通部c、消費部dにおける知的支援情報(例えば情報・データベース及び情報ベース、知識ベース、知恵ベース、評価・判定・指示のアルゴリズム等)を知的情報部に対して読出し可能及び書込み可能に記憶し、例えば知的営農集団及び専門家集団等の知的支援部に対して出力可能に設けてもよい。
【0030】
なお、前述の装置10〜50で取得した各情報を、例えばMOやCD−ROM等の記録媒体Gに一旦記録し、その記録媒体Gから情報管理装置60に移し替えることもできる。
【0031】
且つ、情報管理装置60は、上述の生産部Aの生産情報及び後述する消費部dの消費情報に基づいて、農産物Dの輸送及び流通に要する時間や距離、日数、輸送経路等を算出し、上述の識別情報及び後述する流通情報と対応させて記憶する。
流通部cの流通情報に基づいて、例えば農産物の鮮度、賞味期限、収穫から販売に至るまでの時間、販売量、販売店、販売時間等を算出し、上述の識別情報及び後述する消費情報と対応させて記憶する。
【0032】
前述の流通部cは、生産部aから流通部cに輸送される農産物Dの品質を評価及び判定する品質評価装置70と、その評価及び判定と対応して、農産物D及び載置体E、容器Fに付設された記憶媒体Gの識別情報を読取る情報通信装置71と、例えば自動車や列車、飛行機、船舶、自転車、輸送する個人及び団体、組織、輸送及び流通に要する時間や距離、日数、輸送経路、輸送量、荷造り方法等の輸送に関連する流通情報(図8参照)を入力する情報端末装置72と、流通部cにおける様々な情報を情報管理装置60に送受信する情報通信装置73とを備えている。
【0033】
前述の消費部dは、流通部cから供給及び消費者に販売される農産物Dの品質を評価及び判定する品質評価装置80と、その評価及び判定と対応して、農産物D及び載置体E、容器Fに付設された記憶媒体Gの識別情報を読取る情報通信装置81と、例えば農産物の鮮度、賞味期限、収穫から販売に至るまでの時間、入荷量、販売量、販売店、販売時間、農産物の価格や用途、購入動機、消費者の年齢及び住所、家族構成、消費者の意見(味、鮮度等の意見)等の消費及び販売に関連する消費情報(図8参照)を入力する情報端末装置82と、消費部dにおける様々な情報を情報管理装置60に送受信する情報通信装置83とを備えている。
【0034】
なお、上述の品質評価装置70,80は、前述の品質評価装置40と略同一の構成及び作用を有するので、その詳細な説明を省略する。
【0035】
図示実施例は上記の如く構成するものにして、以下、農産物評価システム1により農産物Dの判定情報を、生産・流通・消費において階層的に関連付けて管理する方法を説明する。
【0036】
先ず、生産部aにおいて、図1に示すように、栽培管理装置10の識別センサー11が検出する農産物D及び農産物D群の識別情報と対応して、圃場A及び施設Bで栽培される農産物Dの気象情報及び土壌情報、栽培情報を栽培センサー12で検出し、その識別情報及び検出情報を、情報通信装置13,14を介して、情報管理装置60に送信する。
【0037】
次に、土壌測定装置20を、図2、図3に示すように、圃場A内の土壌面に沿って矢印方向に走行移動させながら、GPSが検出する位置情報と対応して、圃場A内の土壌の土壌情報を土壌センサー22で検出すると共に、その位置情報及び検出情報を、情報通信装置23を介して、情報管理装置60に送信する。
【0038】
且つ、農産物収穫装置30を、図4、図5に示すように、圃場A内の土壌面に沿って矢印方向に走行移動させながら、収穫ロボット32が収穫する農産物D…を載置体E…に対して1個ずつ載置すると共に、GPSが検出する位置情報を、収穫ロボット32の収穫情報と対応させて、情報通信装置33を介して、情報管理装置60に送信及び農産物Dや載置体Eに付設した記録媒体Gに記録した後、農産物Dが載置された載置体Eを評価部bに供給する。
【0039】
次に、評価部bにおいて、図2、図6に示すように、生産部aから供給される載置体Eに載置及び容器Fに収容された農産物Dを、品質評価装置40の移載ロボット42で保持して評価部bの載置体Eに載置する移載途中及び移載前後において、農産物Dの外部項目及び内部項目を撮像カメラ41で撮像し、その画像情報に基づいて、項目判定装置43で個々に判定した判定情報を情報管理装置60に出力する。また、農産物D又は載置体Eに付設した記録媒体Gに記録した後、評価済みの農産物Dが載置された載置体Eを、次の仕分け装置50に供給する。
【0040】
次に、仕分け装置50は、載置体Eの記録媒体Gに記録された識別情報及び判定情報を情報通信装置51で読取り、その識別情報及び判定情報に基づいて、農産物Dが載置された載置体Eを、仕分け部52…に対して項目別に仕分け処理すると共に、農産物Dを人為的作業及び機械的作業により箱詰め処理して流通部cに出荷する。
【0041】
次に、流通部cにおいて、生産部aから流通部cに輸送される農産物Dの品質品質評価装置70で評価及び判定し、その評価及び判定と対応して、載置体Eに付設された記録媒体Gの識別情報を情報通信装置71で読取ると共に、上述の評価情報及び識別情報を、情報通信装置73から情報管理装置60に送信する。
【0042】
次に、消費部dにおいて、流通部cから供給及び消費者に販売される農産物Dの品質を品質評価装置80で評価及び判定し、その評価及び判定と対応して、載置体Eに付設された記録媒体Gの識別情報を情報通信装置81で読取ると共に、上述の評価情報及び識別情報を、情報通信装置83から情報管理装置60に送信して一括管理する。
【0043】
以上のように、栽培管理装置10の栽培情報及び土壌測定装置20の土壌情報、農産物収穫装置30の収穫情報と、品質評価装置40の判定情報とを階層的に関連付けて情報管理装置60により一括管理(図8参照)するので、例えば栽培場所や栽培方法、農薬・肥料の散布量、所定項目(例えば等階級)等の農産物Dに関する詳細な情報を、生産・流通・消費において正確且つ確実に把握することができ、同一の農産物Dを栽培するときの参考及び改善に活用して、収益性の向上を図ることができる。且つ、不良品及び規格外の農産物Dが発見された場合、その発生場所及び発生原因、産地、生産者等を、情報管理装置60に記憶された情報経路をさかのぼって確実に究明することができ、小規模農場における情報管理及び生産・流通・消費における農産物のトレーサビリティに最適である。且つ、図2の品質評価装置40を、生産部a及び評価部b、流通部c、消費部dに移動させて、農産物D全体の所定項目を個々に評価及び判定することもできる。
【0044】
図7は、上述の品質評価装置40を、GPS機能を備えた農産物収穫装置30の走行車31を搭載した他の例を示し、圃場A内の土壌面及び樹木に沿って図5に示す矢印方向に走行移動するとき、収穫ロボット32の収穫動作と対応して、農産物Dの収穫位置や収穫場所、樹木の位置、栽培位置等をGPSで検出する。
【0045】
且つ、収穫ロボット32で収穫した農産物Dを載置体Eに載置する動作途中及び移載前後において、農産物Dの外部項目及び内部項目を撮像カメラ41で撮像し、その画像情報に基づいて、項目判定装置43で個々に判定した判定情報を、農産物D毎に設定される識別情報と対応して情報管理装置60に記憶するか、農産物D又は載置体Eに付設した記録媒体Gに記録するので、農産物Dの収穫位置及び場所、樹木、判定情報等の情報を対応させて管理することができ、上述の実施例と略同等の作用及び効果を奏することができる。且つ、規格外の農産物Dを、収穫時において廃棄又は破棄するので、農産物Dの貯蔵スペースが小さくて済み、生産者Bに与える経済的な損失を最小限に抑えることができる。
【図面の簡単な説明】
【図1】農産物評価システムの構成を示す説明図。
【図2】土壌測定装置及び品質評価装置の動作を示す側面図。
【図3】土壌測定装置の移動経路を示す平面図。
【図4】移動式の農産物収穫装置による収穫動作を示す斜視図。
【図5】農産物収穫装置の移動経路を示す平面図。
【図6】品質評価装置による評価動作を示す斜視図。
【図7】品質評価装置を備えた農産物収穫装置の収穫評価動作を示す斜視図。
【図8】情報付き圃場及び農産物の情報受渡し経路を示す説明図。
【符号の説明】
A…圃場
D…農産物
E…載置体
G…記録媒体
1…農産物評価システム
10…栽培管理装置
20…土壌測定装置
30…農産物収穫装置
32…収穫ロボット
40…品質評価装置
41…撮像カメラ
42…移載ロボット
43…項目判定装置
50…仕分け装置
60…情報管理装置
70,80…品質評価装置
【発明の属する技術分野】
この発明は、例えば小規模農場における情報管理及び生産・流通・消費における農産物のトレーサビリティに用いられる農産物評価システムに関する。
【0002】
【従来の技術】
従来、上述の農産物に関する情報を管理する方法としては、例えば作物収穫機の作物品質計測手段で計測した作物の品質計測情報を、情報出力手段から計測情報収集手段に出力して、計測情報収集手段で収集した各収穫場所に対応する作物の品質計測情報と、その品質計測情報に基づいて、品質マップ作成手段で作成した各収穫場所に対応する作物の地域毎の品質マップと、生産管理情報作成手段で求めた生産者毎の作物の生産管理情報とを出力する特許文献1の作物情報管理システムがある。
【0003】
【特許文献1】
特開平11−53674号公報。
【0004】
【発明が解決しようとする課題】
しかし、上述の作物情報管理システムは、一つの収穫場所における品質のバラツキ及び収穫場所の違いによる品質のバラツキを管理するが、その他の情報、例えば圃場が存在する地域や生産地及び農家間の営農形態や規模、動機等の情報を管理することができない。且つ、大規模農場の場合、栽培作物が単一作物であるケースが多く、圃場内のバラツキのみが管理すべき情報であるので、上述のような作物情報管理システムにより品質のバラツキを管理することができるが、小規模農場の場合、例えば水田や野菜畑、果樹園或いは住居等が一つの農場に含まれるだけでなく、多数の農家が一つの農地を所有及び耕作利用しており、農家間の経営形態や規模、動機、意思が様々である。つまり、圃場内の用途的バラツキのみならず、圃場間の地域的バラツキ及び農家間の営農形態バラツキが同時に存在するため、管理すべき情報が多く、情報管理が難しいという問題点を有している。
【0005】
この発明は上記問題に鑑み、生産情報取得手段の生産情報及び農産物収穫手段の収穫情報、農産物評価手段の判定情報を階層的に関連付けて情報管理手段で一括管理することにより、小規模農場における情報管理及び生産・流通・消費における農産物のトレーサビリティに適用することができる農産物評価システムの提供を目的とする。
【0006】
【課題を解決するための手段】
この発明は、農産物の生産に関する生産情報を取得する生産情報取得手段と、上記生産情報取得手段が取得する生産情報と対応して、上記農産物を収穫する農産物収穫手段と、上記農産物収穫手段が収穫した農産物の所定項目を評価及び判定する農産物評価手段と、上記生産情報取得手段及び農産物収穫手段、農産物評価手段から出力される情報を階層的に関連付けて一括管理する情報管理手段とを備えた農産物評価システムであることを特徴とする。
【0007】
上述の農産物は、例えば穀類や野菜、果物、お茶、畜産物等で構成される。また、生産情報取得手段は、例えば農産物を栽培及び管理する栽培管理装置、圃場の土壌を測定する土壌測定装置等で構成することができる。また、農産物収穫手段は、例えば農産物を保持する吸着子やアーム、チャック等の保持手段及びその保持手段を備えた収穫ロボットや農産物収穫装置等の機械的作業、人為的な収穫作業等で構成することができる。また、農産物評価手段(例えば品質評価装置)は、例えばモノクロ又はカラーの撮像カメラやビデオカメラ、ディジタルカメラ、画像素子等の光学的な項目計測手段と、例えばパーソナルコンピューターやホストコンピューター、サーバー或いはCPU及びROM、RAMを備えた制御装置等の項目判定手段(例えば項目判定装置)及び情報管理手段(例えば情報管理装置)で構成することができる。
【0008】
つまり、農産物評価システムを構成する生産情報取得手段が取得する農産物の生産に関する生産情報と対応して、例えば圃場や施設等で栽培及び生産される農産物を農産物収穫手段で収穫し、農産物収穫手段が収穫した農産物の所定項目を農産物評価手段で評価及び判定する。且つ、生産情報取得手段及び農産物収穫手段、農産物評価手段から出力される情報を、生産・流通・消費において階層的に関連付けて情報管理手段で一括管理すると共に、その関連する情報を、生産・流通・消費における農産物のトレーサビリティに適用し、必要とする情報を階層的に関連付けて出力する。
【0009】
実施の形態として、上記農産物評価手段を、上記農産物を生産する生産部及び該農産物を流通する流通部、該農産物を消費する流通部に備えることができる。また、上記生産情報取得手段を、上記農産物の栽培に関する情報を取得する栽培情報取得手段(例えば農産物と対応する識別情報を検出する識別センサー、生産情報(例えば気象情報、土壌情報、栽培情報等)を検出及び測定する栽培センサー、各センサーの情報を管理する栽培管理装置等)と、該農産物が栽培される圃場の土壌を測定する土壌情報取得手段(例えば国際公開第01/04627号パンフレットに開示される自走式の土壌測定装置、既に公知の測定装置等)とで構成することができる。また、上記農産物評価手段を、上記農産物の所定項目を計測する項目計測手段と、該項目計測手段から出力される計測情報に基づいて、上記農産物の所定項目を評価及び判定する項目判定手段とで構成することができる。
【0010】
【作用及び効果】
この発明によれば、生産情報取得手段の生産情報及び農産物収穫手段の収穫情報、農作物評価手段の判定情報を階層的に関連付けて情報管理手段により一括管理するので、例えば栽培場所や栽培方法、農薬・肥料の散布量、所定項目(例えば等階級)等の農産物に関する詳細な情報を、生産・流通・消費において正確且つ確実に把握することができ、同一の農産物を栽培するときの参考及び改善に活用して、収益性の向上を図ることができる。且つ、不良品及び規格外の農産物が発見された場合、その発生場所及び発生原因、産地、生産者等を、情報管理手段に記憶された情報経路をさかのぼって確実に究明することができ、小規模農場における情報管理及び生産・流通・消費における農産物のトレーサビリティに最適である。
【0011】
【実施例】
この発明の一実施例を以下図面に基づいて詳述する。
図面は農産物の評価情報を、生産・流通・消費において階層的に関連付けて管理する農産物評価システムを示し、図1に於いて、この農産物評価システム1は、農産物Dを圃場A及び施設Bで栽培する生産部a(営農部)と、農産物Dの品質を評価及び判定する評価部bと、農産物Dを輸送及び流通する流通部cと、農産物Dを販売及び消費する消費部dとを一括管理するシステムである。
【0012】
上述の生産部aは、農産物Dを栽培及び管理する栽培管理装置10と、圃場Aの土壌項目を測定する土壌測定装置20と、圃場A及び施設Bで栽培される農産物Dを収穫する農産物収穫装置30とで構成される。
【0013】
上述の栽培管理装置10は、農産物Dを栽培する栽培場所、例えば圃場Aや施設B等に備えられ、農産物D毎及び農産物D群毎に設定した識別情報を識別センサー11で検出し、その識別情報と対応させて、例えば温度や湿度、日射量、降水量等の気象情報、土質やNPK、pH、EC、有機物、温度、水分量等の土壌情報、品種や施肥、潅水、農薬、土作り、移植、定植、剪定、摘果、摘芯、農作業記録等の栽培情報(図8参照)を栽培センサー12で検出及び測定する。
【0014】
また、例えば育苗や挿し木、鉢上げ、移植、接木、施肥、田植、農薬散布、潅水、調整・加工等を機械的に行う管理装置及びロボットを備えることもできる。
【0015】
且つ、栽培センサー12で検出及び測定した情報を、農産物D及び農産物D群の識別情報と対応して後述する情報管理装置60に記憶する。また、栽培管理装置10に接続された情報通信装置13は、上述の各情報を、通信回線及びネットワークを介して、情報管理装置60に送信及び記憶する。或いは、農産物D及び農産物D群に付設した記録媒体Gに情報通信装置14を対峙して、上述の各情報を読取り可能に記録するか、上述の各情報を、情報端末装置15で入力することもできる。
【0016】
前述の土壌測定装置20は、図2、図3にも示すように、GPS機能を備えた自走式の走行車21に搭載され、圃場A内の土壌を矢印方向に走行移動するとき、GPSが検出する位置情報と対応して、例えば土壌の性質や形状、面積、土壌肥沃量、土壌水分量、含有成分量、農薬散布量、雑草の分布等の土壌情報を土壌センサー22で検出及び測定する。また、一つの圃場A内に含まれる圃場内バラツキ情報、例えば水田や野菜畑、果樹園或いは住居等を検出及び入力してもよい。
【0017】
且つ、土壌測定装置20に接続された情報通信装置23は、上述の各情報を、通信回線及びネットワークを介して、情報管理装置60に送信及び記憶する。また、土壌測定装置20を、例えば手動で移動させて土壌測定することもできる。
【0018】
且つ、作業者の手及び収穫機で収穫する農産物Dの生育状態を測定する作物生育測定装置25と、病害虫の分布及び有無を測定する病害虫測定装置26とを走行車21に搭載し、一つの圃場A内で収穫される農産物Dの収穫量を計測する収量測定装置24を、走行車21又は31に搭載或いは後述する項目判定装置43に内蔵している。また、上述の各情報を、情報端末装置27で入力することもできる。
【0019】
前述の農産物収穫装置30は、図4、図5にも示すように、GPS機能を備えた自走式の走行車31に搭載され、圃場A内の土壌を矢印方向に走行移動するとき、後述する収穫ロボット32の収穫動作と対応して、その農産物Dの収穫位置や収穫場所、樹木の位置、栽培位置、三次元位置等の情報(図8参照)をGPSで検出する。また、その位置及び場所、樹木等を特定するのに必要な情報を情報端末装置35で入力することもできる。
【0020】
且つ、上述の収穫ロボット32は、例えば吸着子やチャック、アーム等を備えたマニピュレータ又は収穫機で構成され、圃場Aで栽培される農産物D或いは樹木に実った農産物D、施設Bで栽培される農産物D等を、1個ずつ収穫及び複数を一括して収穫し、記録媒体Gが付設された載置体Eに載置する。或いは、コンテナや箱等の容器Fに整列して複数収容するか、袋体に袋詰めすることもできる。また、記録媒体Gを、載置体Eに載置又は容器Fに収容される農産物D自体に付設してもよい。
【0021】
且つ、農産物収穫装置30に接続された一方の情報通信装置33は、上述の各情報を、通信回線及びネットワークを介して、情報管理装置60に送信及び記憶する。他方の情報通信装置34は、農産物D及び載置体E、容器Fに付設した記録媒体Gに対峙され、上述の収穫ロボット32の収穫動作と対応して、農産物Dの収穫位置や収穫場所、樹木の位置、栽培位置等を記録媒体Gに記録及び読取る。
【0022】
前述の評価部bは、生産部a及び流通部cの間に配設され、農産物Dの品質を評価及び判定する品質評価装置40と、農産物Dを項目別に仕分け処理する仕分け装置50と、装置10〜50の処理情報を一括管理する情報管理装置60とで構成される。
【0023】
上述の品質評価装置40は、図2、図6にも示すように、前述の農産物収穫装置30により収穫(又は作業者の手で収穫)した農産物Dを後述する移載ロボット42で移載する動作途中及び移載動作の前後において、農産物Dの外部項目及び内部項目を撮像カメラ41で撮像する。例えば生産部aにおいて載置体Eに載置及び容器Fに収容された農産物Dを、移載ロボット42で保持して評価部bの載置体Eに載置及び容器Fに収容する移載途中において、撮像カメラ41の向きを変更(例えば略90度)するか、農産物Dを回転(例えば略270度)する等して、農産物D下面及び側面全周を撮像カメラ41で撮像する。
【0024】
且つ、乗換え前又は乗換え後において、載置体Eに載置及び容器Fに収容された農産物D上面を撮像カメラ41で撮像する。農産物D内部を透過した検出光を撮像する等して取得した画像情報と、予め記憶された基準情報とを項目判定装置43で比較及び演算して、農産物D全体の品質(例えば色相や損傷、病気、成熟度、大きさ、形状、高さ、幅、体積、偏平度、腐り具合、浮き皮具合、空洞、糖酸度、等階級、規格外、残留農薬、成分分析等の所定項目、図8参照)を個々に評価及び判定し、その判定情報(及び農協、共同選果施設の名前)を情報管理装置60に出力する。また、農産物Dの上面及び鏡面体が反射する農産物Dの側面全周を一つの撮像カメラで撮像することもできる。なお、移載ロボット42は、前述の収穫ロボット32と略同一の構成であるのでその詳細な説明を省略する。
【0025】
且つ、品質評価装置40に接続された情報通信装置44は、農産物D及び載置体E、容器Fに付設した記録媒体Gに対峙され、上述の撮像カメラ41による撮像動作と対応して、農産物D及び載置体Eに付設した記録媒体Gの識別情報を読取ると共に、上述の収量情報及び識別情報は、品質評価装置40の判定情報と対応させて情報管理装置60に出力及び判定情報と対応させて記録媒体Gに記録する。また、上述の各情報を、情報端末装置45で入力することもできる。
【0026】
前述の仕分け装置50は、上述の品質評価装置40から供給される農産物D及び載置体E、容器Fに付設した記録媒体Gに情報通信装置51を対峙して、その記録媒体Gに記録された判定情報を読取るか、記録媒体Gに記録された識別情報と対応する判定情報を情報管理装置60から読出しする等して、その識別情報及び判定情報に基づいて、農産物Dが載置された載置体E及び収容された容器Fを仕分け部52…に対して項目別に仕分け処理し、仕分け部52に仕分けられた農産物D…を、人為的作業及び機械的作業により箱詰め処理及び袋詰め処理して流通部cに出荷する。或いは、貯蔵及び保管する保管部(図示省略)に出荷する。
【0027】
且つ、仕分け情報を、上述の識別情報と対応させて情報管理装置60に出力する。また、仕分け時に生じる農産物Dの残渣は、例えば残渣処理装置や残渣処理ロボット等により機械的に処理する。
【0028】
前述の情報管理装置60は、前述の栽培管理装置10から出力される気象情報及び土壌情報、栽培情報と、土壌測定装置20から出力される圃場A内の位置情報及び土壌情報と、農産物収穫装置30から出力される収穫情報と、品質評価装置40から出力される識別情報及び判定情報と、仕分け装置50から出力される仕分け情報とを階層的に関連付けて一括管理する。且つ、上述の栽培や土壌、収穫、判定等の情報に基づいて、圃場内及び圃場間、生産者間におけるマップを作成し、読出し可能に記憶する。
【0029】
且つ、生産部a及び流通部c、消費部dにおける知的支援情報(例えば情報・データベース及び情報ベース、知識ベース、知恵ベース、評価・判定・指示のアルゴリズム等)を知的情報部に対して読出し可能及び書込み可能に記憶し、例えば知的営農集団及び専門家集団等の知的支援部に対して出力可能に設けてもよい。
【0030】
なお、前述の装置10〜50で取得した各情報を、例えばMOやCD−ROM等の記録媒体Gに一旦記録し、その記録媒体Gから情報管理装置60に移し替えることもできる。
【0031】
且つ、情報管理装置60は、上述の生産部Aの生産情報及び後述する消費部dの消費情報に基づいて、農産物Dの輸送及び流通に要する時間や距離、日数、輸送経路等を算出し、上述の識別情報及び後述する流通情報と対応させて記憶する。
流通部cの流通情報に基づいて、例えば農産物の鮮度、賞味期限、収穫から販売に至るまでの時間、販売量、販売店、販売時間等を算出し、上述の識別情報及び後述する消費情報と対応させて記憶する。
【0032】
前述の流通部cは、生産部aから流通部cに輸送される農産物Dの品質を評価及び判定する品質評価装置70と、その評価及び判定と対応して、農産物D及び載置体E、容器Fに付設された記憶媒体Gの識別情報を読取る情報通信装置71と、例えば自動車や列車、飛行機、船舶、自転車、輸送する個人及び団体、組織、輸送及び流通に要する時間や距離、日数、輸送経路、輸送量、荷造り方法等の輸送に関連する流通情報(図8参照)を入力する情報端末装置72と、流通部cにおける様々な情報を情報管理装置60に送受信する情報通信装置73とを備えている。
【0033】
前述の消費部dは、流通部cから供給及び消費者に販売される農産物Dの品質を評価及び判定する品質評価装置80と、その評価及び判定と対応して、農産物D及び載置体E、容器Fに付設された記憶媒体Gの識別情報を読取る情報通信装置81と、例えば農産物の鮮度、賞味期限、収穫から販売に至るまでの時間、入荷量、販売量、販売店、販売時間、農産物の価格や用途、購入動機、消費者の年齢及び住所、家族構成、消費者の意見(味、鮮度等の意見)等の消費及び販売に関連する消費情報(図8参照)を入力する情報端末装置82と、消費部dにおける様々な情報を情報管理装置60に送受信する情報通信装置83とを備えている。
【0034】
なお、上述の品質評価装置70,80は、前述の品質評価装置40と略同一の構成及び作用を有するので、その詳細な説明を省略する。
【0035】
図示実施例は上記の如く構成するものにして、以下、農産物評価システム1により農産物Dの判定情報を、生産・流通・消費において階層的に関連付けて管理する方法を説明する。
【0036】
先ず、生産部aにおいて、図1に示すように、栽培管理装置10の識別センサー11が検出する農産物D及び農産物D群の識別情報と対応して、圃場A及び施設Bで栽培される農産物Dの気象情報及び土壌情報、栽培情報を栽培センサー12で検出し、その識別情報及び検出情報を、情報通信装置13,14を介して、情報管理装置60に送信する。
【0037】
次に、土壌測定装置20を、図2、図3に示すように、圃場A内の土壌面に沿って矢印方向に走行移動させながら、GPSが検出する位置情報と対応して、圃場A内の土壌の土壌情報を土壌センサー22で検出すると共に、その位置情報及び検出情報を、情報通信装置23を介して、情報管理装置60に送信する。
【0038】
且つ、農産物収穫装置30を、図4、図5に示すように、圃場A内の土壌面に沿って矢印方向に走行移動させながら、収穫ロボット32が収穫する農産物D…を載置体E…に対して1個ずつ載置すると共に、GPSが検出する位置情報を、収穫ロボット32の収穫情報と対応させて、情報通信装置33を介して、情報管理装置60に送信及び農産物Dや載置体Eに付設した記録媒体Gに記録した後、農産物Dが載置された載置体Eを評価部bに供給する。
【0039】
次に、評価部bにおいて、図2、図6に示すように、生産部aから供給される載置体Eに載置及び容器Fに収容された農産物Dを、品質評価装置40の移載ロボット42で保持して評価部bの載置体Eに載置する移載途中及び移載前後において、農産物Dの外部項目及び内部項目を撮像カメラ41で撮像し、その画像情報に基づいて、項目判定装置43で個々に判定した判定情報を情報管理装置60に出力する。また、農産物D又は載置体Eに付設した記録媒体Gに記録した後、評価済みの農産物Dが載置された載置体Eを、次の仕分け装置50に供給する。
【0040】
次に、仕分け装置50は、載置体Eの記録媒体Gに記録された識別情報及び判定情報を情報通信装置51で読取り、その識別情報及び判定情報に基づいて、農産物Dが載置された載置体Eを、仕分け部52…に対して項目別に仕分け処理すると共に、農産物Dを人為的作業及び機械的作業により箱詰め処理して流通部cに出荷する。
【0041】
次に、流通部cにおいて、生産部aから流通部cに輸送される農産物Dの品質品質評価装置70で評価及び判定し、その評価及び判定と対応して、載置体Eに付設された記録媒体Gの識別情報を情報通信装置71で読取ると共に、上述の評価情報及び識別情報を、情報通信装置73から情報管理装置60に送信する。
【0042】
次に、消費部dにおいて、流通部cから供給及び消費者に販売される農産物Dの品質を品質評価装置80で評価及び判定し、その評価及び判定と対応して、載置体Eに付設された記録媒体Gの識別情報を情報通信装置81で読取ると共に、上述の評価情報及び識別情報を、情報通信装置83から情報管理装置60に送信して一括管理する。
【0043】
以上のように、栽培管理装置10の栽培情報及び土壌測定装置20の土壌情報、農産物収穫装置30の収穫情報と、品質評価装置40の判定情報とを階層的に関連付けて情報管理装置60により一括管理(図8参照)するので、例えば栽培場所や栽培方法、農薬・肥料の散布量、所定項目(例えば等階級)等の農産物Dに関する詳細な情報を、生産・流通・消費において正確且つ確実に把握することができ、同一の農産物Dを栽培するときの参考及び改善に活用して、収益性の向上を図ることができる。且つ、不良品及び規格外の農産物Dが発見された場合、その発生場所及び発生原因、産地、生産者等を、情報管理装置60に記憶された情報経路をさかのぼって確実に究明することができ、小規模農場における情報管理及び生産・流通・消費における農産物のトレーサビリティに最適である。且つ、図2の品質評価装置40を、生産部a及び評価部b、流通部c、消費部dに移動させて、農産物D全体の所定項目を個々に評価及び判定することもできる。
【0044】
図7は、上述の品質評価装置40を、GPS機能を備えた農産物収穫装置30の走行車31を搭載した他の例を示し、圃場A内の土壌面及び樹木に沿って図5に示す矢印方向に走行移動するとき、収穫ロボット32の収穫動作と対応して、農産物Dの収穫位置や収穫場所、樹木の位置、栽培位置等をGPSで検出する。
【0045】
且つ、収穫ロボット32で収穫した農産物Dを載置体Eに載置する動作途中及び移載前後において、農産物Dの外部項目及び内部項目を撮像カメラ41で撮像し、その画像情報に基づいて、項目判定装置43で個々に判定した判定情報を、農産物D毎に設定される識別情報と対応して情報管理装置60に記憶するか、農産物D又は載置体Eに付設した記録媒体Gに記録するので、農産物Dの収穫位置及び場所、樹木、判定情報等の情報を対応させて管理することができ、上述の実施例と略同等の作用及び効果を奏することができる。且つ、規格外の農産物Dを、収穫時において廃棄又は破棄するので、農産物Dの貯蔵スペースが小さくて済み、生産者Bに与える経済的な損失を最小限に抑えることができる。
【図面の簡単な説明】
【図1】農産物評価システムの構成を示す説明図。
【図2】土壌測定装置及び品質評価装置の動作を示す側面図。
【図3】土壌測定装置の移動経路を示す平面図。
【図4】移動式の農産物収穫装置による収穫動作を示す斜視図。
【図5】農産物収穫装置の移動経路を示す平面図。
【図6】品質評価装置による評価動作を示す斜視図。
【図7】品質評価装置を備えた農産物収穫装置の収穫評価動作を示す斜視図。
【図8】情報付き圃場及び農産物の情報受渡し経路を示す説明図。
【符号の説明】
A…圃場
D…農産物
E…載置体
G…記録媒体
1…農産物評価システム
10…栽培管理装置
20…土壌測定装置
30…農産物収穫装置
32…収穫ロボット
40…品質評価装置
41…撮像カメラ
42…移載ロボット
43…項目判定装置
50…仕分け装置
60…情報管理装置
70,80…品質評価装置
Claims (4)
- 農産物の生産に関する生産情報を取得する生産情報取得手段と、
上記生産情報取得手段が取得する生産情報と対応して、上記農産物を収穫する農産物収穫手段と、
上記農産物収穫手段が収穫した農産物の所定項目を評価及び判定する農産物評価手段と、
上記生産情報取得手段及び農産物収穫手段、農産物評価手段から出力される情報を階層的に関連付けて一括管理する情報管理手段とを備えた
農産物評価システム。 - 上記農産物評価手段を、上記農産物を生産する生産部及び該農産物を流通する流通部、該農産物を消費する流通部に備えた
請求項1記載の農産物評価システム。 - 上記生産情報取得手段を、上記農産物の栽培に関する情報を取得する栽培情報取得手段と、該農産物が栽培される圃場の土壌を測定する土壌情報取得手段とで構成した
請求項1記載の農産物評価システム。 - 上記農産物評価手段を、上記農産物の所定項目を計測する項目計測手段と、該項目計測手段から出力される計測情報に基づいて、上記農産物の所定項目を評価及び判定する項目判定手段とで構成した
請求項1又は2記載の農産物評価システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002371654A JP2004203514A (ja) | 2002-12-24 | 2002-12-24 | 農産物評価システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002371654A JP2004203514A (ja) | 2002-12-24 | 2002-12-24 | 農産物評価システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004203514A true JP2004203514A (ja) | 2004-07-22 |
Family
ID=32810488
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002371654A Pending JP2004203514A (ja) | 2002-12-24 | 2002-12-24 | 農産物評価システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004203514A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018211621A1 (ja) * | 2017-05-17 | 2018-11-22 | inaho株式会社 | 農作業装置、農作業管理システム、及びプログラム |
| JP2019041706A (ja) * | 2017-09-05 | 2019-03-22 | ヤンマー株式会社 | 収穫選別システム |
| JP2021012468A (ja) * | 2019-07-04 | 2021-02-04 | 株式会社レグミン | 農産物処理方法、農産物処理システム及びプログラム |
| WO2024095988A1 (ja) * | 2022-11-01 | 2024-05-10 | 米豆麦造り株式会社 | 情報提供システム、情報提供方法及び、情報提供プログラム |
| WO2024247590A1 (ja) * | 2023-05-31 | 2024-12-05 | オムロン株式会社 | 植物撮像システム |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1153674A (ja) * | 1997-08-07 | 1999-02-26 | Kubota Corp | 作物の情報管理システム |
| JP2002149744A (ja) * | 2000-11-09 | 2002-05-24 | Ebara Corp | 農作業管理装置及び農作業管理方法及び農作業機械 |
-
2002
- 2002-12-24 JP JP2002371654A patent/JP2004203514A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1153674A (ja) * | 1997-08-07 | 1999-02-26 | Kubota Corp | 作物の情報管理システム |
| JP2002149744A (ja) * | 2000-11-09 | 2002-05-24 | Ebara Corp | 農作業管理装置及び農作業管理方法及び農作業機械 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018211621A1 (ja) * | 2017-05-17 | 2018-11-22 | inaho株式会社 | 農作業装置、農作業管理システム、及びプログラム |
| CN110662417A (zh) * | 2017-05-17 | 2020-01-07 | inaho株式会社 | 农作业装置、农作业管理系统以及程序 |
| JPWO2018211621A1 (ja) * | 2017-05-17 | 2020-03-12 | inaho株式会社 | 農作業装置、農作業管理システム、及びプログラム |
| US11632907B2 (en) | 2017-05-17 | 2023-04-25 | Inaho, Inc. | Agricultural work apparatus, agricultural work management system, and program |
| JP2019041706A (ja) * | 2017-09-05 | 2019-03-22 | ヤンマー株式会社 | 収穫選別システム |
| JP2021012468A (ja) * | 2019-07-04 | 2021-02-04 | 株式会社レグミン | 農産物処理方法、農産物処理システム及びプログラム |
| JP7296109B2 (ja) | 2019-07-04 | 2023-06-22 | 株式会社レグミン | 農産物処理方法、農産物処理システム及びプログラム |
| WO2024095988A1 (ja) * | 2022-11-01 | 2024-05-10 | 米豆麦造り株式会社 | 情報提供システム、情報提供方法及び、情報提供プログラム |
| WO2024247590A1 (ja) * | 2023-05-31 | 2024-12-05 | オムロン株式会社 | 植物撮像システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Longchamps et al. | Yield sensing technologies for perennial and annual horticultural crops: a review | |
| US6671698B2 (en) | Method and system for automated tracing of an agricultural product | |
| US6691135B2 (en) | Method and system for automated tracing of an agricultural product | |
| US7761334B2 (en) | Method and system for automated tracing of an agricultural product | |
| US6336066B1 (en) | Process for using localized agricultural data to optimize the cultivation of perennial plants | |
| USRE37574E1 (en) | Method and apparatus for mapping crop quality | |
| Fountas et al. | Precision agriculture: Crop management for improved productivity and reduced environmental impact or improved sustainability | |
| Gupta et al. | Robotics and artificial intelligence (AI) in agriculture with major emphasis on food crops | |
| AU2019226618B2 (en) | Produce harvesting apparatus and precision farming system | |
| JP2004199332A (ja) | 階層的情報管理システム | |
| JP2004133498A (ja) | 精密農法情報管理システム | |
| Ampatzidis et al. | Portable weighing system for monitoring picker efficiency during manual harvest of sweet cherry | |
| JP2004283133A (ja) | 移動式農産物収穫装置 | |
| JP2004203514A (ja) | 農産物評価システム | |
| JP7612534B2 (ja) | 情報管理システム | |
| JP2019517270A (ja) | 有用植物の植物特性を求めるための方法 | |
| Green et al. | Farming system perspective | |
| Matthews | The mechanical farm of 2030 | |
| JP2004305109A (ja) | 移動式農産物収穫装置 | |
| Singh | MID-HILLS OF JAMMU AND KASHMIR | |
| JP2022047305A (ja) | 情報管理システム | |
| Srivastava | Disruptive technologies: shaping the future of agriculture. | |
| Lokhorst et al. | JIAC2009 book of abstracts | |
| Vieri et al. | SPARKLE Project: e-Learning Solutions to Create New Digital Agronomist Profiles on European Students | |
| Gazdecki et al. | Farming with use of the IoF |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050701 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20071114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071120 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080401 |