JP2004208445A - ハイブリッド車両の駆動制御装置 - Google Patents
ハイブリッド車両の駆動制御装置 Download PDFInfo
- Publication number
- JP2004208445A JP2004208445A JP2002376299A JP2002376299A JP2004208445A JP 2004208445 A JP2004208445 A JP 2004208445A JP 2002376299 A JP2002376299 A JP 2002376299A JP 2002376299 A JP2002376299 A JP 2002376299A JP 2004208445 A JP2004208445 A JP 2004208445A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle speed
- clutch
- motor
- control device
- temperature
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
- Arrangement Of Transmissions (AREA)
- Arrangement And Driving Of Transmission Devices (AREA)
- Hybrid Electric Vehicles (AREA)
- Hydraulic Clutches, Magnetic Clutches, Fluid Clutches, And Fluid Joints (AREA)
Abstract
【解決手段】ハイブリッド車両の増速時、車速Vが車速閾値V1に達する以前に、車速Vに基づいて第1モータの駆動力を徐々に減少させ、車速Vが車速閾値V1以上であるときに第1モータの駆動力を0にする。車速Vが車速閾値V1以上であることを少なくとも1つの条件として第1モータが接続されている第3クラッチを遮断する。
【選択図】図3
Description
【発明の属する技術分野】
本発明は、エンジンおよびモータにより駆動軸が駆動されて走行するハイブリッド車両の駆動制御装置であって、特に、モータと駆動軸との間にクラッチを有し、車両の状態に応じて該クラッチを接続および遮断するハイブリッド車両の駆動制御装置に関する。
【0002】
【従来の技術】
近時、内燃機関であるエンジンと電動のモータとを組み合わせて車輪を駆動するハイブリッド車両が開発されている。ハイブリッド車両は、走行状態に応じて、エンジン単体でのエンジン走行モード、モータ単体でのモータ走行モード、エンジン走行時にモータによってエンジンの出力補助を行うモータアシスト走行モード、モータで発電を行ってバッテリに充電しながら走行する発電走行モード等、モード切り替えを行いながら走行している。このようなハイブリッド車両では、運転状態に応じてモータがエンジンを適切にアシストすることによって、燃料消費量や排出ガス量が低減される。モータの駆動力は、例えば、クラッチを介して駆動軸に伝達されている。
【0003】
モータの減速比は、高い駆動力をうるために大きく設定されており、高速走行時にはモータの回転数が極めて高くなる。従って、モータの過熱を防ぐとともに耐久性を向上させるために、車速が所定値以上となるときにはクラッチを遮断する技術が提案されている(例えば、特許文献1参照)。
【0004】
この場合、クラッチを遮断する速度付近で走行を行うとクラッチの接続および遮断が頻繁に繰り返されることとなり、クラッチの耐久性を損なうとともに搭乗者に違和感を与えることになる。これを防ぐために、クラッチの接続および遮断にヒステリシス特性をもたせた技術が提案されている(例えば、特許文献2参照)。
【0005】
この技術によれば、クラッチの接続および遮断のショックを相当に防止でき、それによりクラッチの構造の簡略化、クラッチ容量の低減および耐久性の向上を図ることができて好適である。
【0006】
【特許文献1】
特開2001−333507号公報(第1図)
【特許文献2】
特開2002−160541号公報(段落[0043]〜[0046])
【0007】
【発明が解決しようとする課題】
ところで、所定の速度においてクラッチを遮断する際には、モータは多少の駆動力を発生しており、この駆動力はクラッチを介して駆動軸に伝達されている。従って、クラッチを遮断したときには走行駆動力が多少変化することが避けられず、搭乗者に違和感を与えることになる。
【0008】
また、クラッチを遮断する際の駆動力を強制的に抑制するようにすると、十分な駆動力を確保することと、ヒステリシス特性との両立が困難である。
【0009】
本発明はこのような課題を考慮してなされたものであり、エンジンおよびモータを有するハイブリッド車両において、モータと駆動軸との間に設けられたクラッチを遮断する際に、走行駆動力の変化を減少させるとともにクラッチを遮断するタイミングを高速域に設定することを可能にし、さらにモータやインバータ等の過熱を防止することを可能にするハイブリッド車両の駆動制御装置を提供することを目的とする。
【0010】
【課題を解決するための手段】
本発明に係るハイブリッド車両の駆動制御装置は、前後軸の一方をエンジンで駆動し、他方をモータにより駆動して走行するハイブリッド車両の駆動制御装置であって、前記モータと駆動軸とを接続または遮断するクラッチと、前記モータの駆動力を制御する駆動力制御部と、前記ハイブリッド車両の車速を検出する速度検出部と、前記クラッチを接続または遮断するタイミングを判定し、該タイミングに基づいて前記クラッチを操作するクラッチ制御部と、を有し、前記ハイブリッド車両の増速時、前記駆動力制御部は、前記車速に基づいて前記モータの駆動力を徐々に減少させ、前記車速が所定の車速閾値に達したときに前記モータの駆動力を0にし、前記クラッチ制御部は、前記車速が前記車速閾値を超えたことを1つの条件として前記クラッチを遮断することを特徴とする(請求項1記載の発明)。
【0011】
このように、クラッチを遮断する前にモータの駆動力を0にすることにより、クラッチを遮断する際に走行駆動力の変化を減少させることができる。
【0012】
この場合、前記モータを駆動する駆動回路と、前記モータに電力を供給するバッテリと、を有し、前記車速閾値は、第1車速閾値およびそれより大きい第2車速閾値からなり、前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記モータ、前記駆動回路および/または前記バッテリの状態に基づいて前記クラッチを遮断し、前記車速が前記第2車速閾値以上であるとき、前記状態に係ることなく前記クラッチを遮断するようにしてもよい(請求項2記載の発明)。
【0013】
このように、モータ、駆動回路および/またはバッテリの状態に基づいてクラッチを遮断することにより、クラッチを遮断するタイミングを高速域に設定することを可能にし、さらにモータの過熱を防止することができる。また、モータの定格回転数から第2車速閾値を設定し、該第2車速閾値でクラッチを遮断することにより、モータの過熱を確実に防ぐことができる。
【0014】
また、前記モータ、前記駆動回路および/または前記バッテリの温度を検出する温度検出部と、タイマ機能部と、を有し、前記タイマ機能部は、前記車速が前記第1車速閾値に達したときに計時を開始し、前記クラッチ制御部は、前記モータ、前記駆動回路および/または前記バッテリの温度、並びに、前記車速に基づいて前記クラッチの遮断時間を設定し、前記タイマ機能部による計測時間が、前記遮断時間に達したことを1つの条件として前記クラッチを遮断するようにしてもよい(請求項3記載の発明)。
【0015】
このように、モータ、駆動回路および/またはバッテリの温度、並びに、車速に基づいてクラッチを遮断する時間を設定することにより、柔軟な時間設定が可能であり、温度または車速が変化したときにも確実にクラッチを遮断し、モータ、駆動回路および/またはバッテリを保護することができる。
【0016】
さらに、前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記ハイブリッド車両が安定走行していることを1つの条件として前記クラッチを遮断するようにしてもよい(請求項4記載の発明)。これにより、高速走行時におけるモータ非作動時の不要な引きずり損失を減らすことで燃費を向上させることができる。
【0017】
前記ハイブリッド車両の安定走行は、所定時間あたりの車速の変化が所定値以下の場合とすると、安定走行を簡便かつ確実に判定することができる(請求項5記載の発明)。
【0018】
さらにまた、前記モータ、前記駆動回路および/または前記バッテリの温度を検出する温度検出部と、タイマ機能部と、を有し、前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記温度検出部が検出する温度が所定温度以上の状態で、かつその状態が所定時間連続していることが前記タイマ機能部によって検出されたことを1つの条件として前記クラッチを遮断するようにしてもよい(請求項6記載の発明)。
【0019】
前記モータ、前記駆動回路および/または前記バッテリの温度を検出する温度検出部を有し、前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記温度検出部に基づいて算出された温度変化率が所定の閾値以上であることを1つの条件として前記クラッチを遮断するようにしてもよい(請求項7記載の発明)。
【0020】
このようにモータ、駆動回路および/またはバッテリの温度に基づいてクラッチを遮断することにより、これらのモータ、駆動回路およびバッテリの過熱を防止することができる。
【0021】
また、前記モータ、前記駆動回路および/または前記バッテリの温度を検出する温度検出部と、前記モータ、前記駆動回路および/または前記バッテリが所定の稼動開始温度以上であるときに前記モータ、前記駆動回路および/または前記バッテリの冷却を行う冷却デバイスと、を有し、前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記温度検出部が検出する温度が、前記稼動開始温度より低温の閾値温度以下であることを1つの条件として前記クラッチを遮断するようにしてもよい(請求項8記載の発明)。
【0022】
さらに、前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記モータの発熱量を算出し、該発熱量の累積加算値が所定の熱量閾値に達したことを1つの条件として前記クラッチを遮断するようにしてもよい(請求項9記載の発明)。
【0023】
このように発熱量を算出することによって、温度検出部を省略することができる。
【0024】
さらにまた、前記バッテリの電力残量を検出する電力残量検出部を有し、前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記電力残量が設定された第1電力残量閾値以下、または、前記第1電力残量閾値より大きい第2電力残量閾値以上であることを1つの条件として前記クラッチを遮断するようにしてもよい(請求項10記載の発明)。
【0025】
前記モータに電力を供給するバッテリと、前記バッテリの電力残量を検出する電力残量検出部と、を有し、前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記電力残量の変化率が所定の閾値以上であることを1つの条件として前記クラッチを遮断するようにしてもよい(請求項11記載の発明)。
【0026】
このように、バッテリの電力残量に基づいてクラッチを遮断することにより、バッテリの過放電を防ぐことができる。
【0027】
前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記車速が前記第1車速閾値以上となっている時間を計測し、該時間が所定の時間閾値に達したことを1つの条件として前記クラッチを遮断するようにしてもよい(請求項12記載の発明)。
【0028】
このように、所定の時間閾値に基づいてクラッチを遮断することにより、他の条件が成立しない場合であっても、確実にクラッチを遮断することができる。
【0029】
【発明の実施の形態】
以下、本発明に係るハイブリッド車両の駆動制御装置について好適な実施の形態を挙げ、添付の図1〜図15を参照しながら説明する。本実施の形態に係る駆動制御装置10は、ハイブリッド車両12に適用される。
【0030】
図1に示すように、ハイブリッド車両12は四輪駆動車であり、内燃機関であるエンジン14と、バッテリ15から供給される電力によって回転する第1モータ16、第2モータ18と、これらのエンジン14、第1モータ16、第2モータ18等を集中的に管理および制御するメインECU(クラッチ制御部、Electric Control Unit)20とを有する。メインECU20は、RAM(Random Access Memory)、ROM(Read Only Memory)、CPU(Central Processing Unit)、入出力インターフェース、タイマ等からなるマイクロコンピュータ(図示せず)であり、ROMに記録されたプログラム、マップおよびデータ等に従って処理を行う。メインECU20は、プログラムの変更によって種々の動作が可能である。
【0031】
また、ハイブリッド車両12は、第1モータ16および第2モータ18の電力制御を行う第1および第2PDU(駆動回路、Power Drive Unit)22、24と、エンジン14および第2モータ18によって駆動される前輪26aと、第1モータ16によって駆動される後輪26bとを有する。第1PDU22および第2PDU24は、それぞれ第1モータ16および第2モータ18に供給する電流値を検出する機能を有する。
【0032】
エンジン14と第2モータ18は共通の駆動軸28に接続されており、オイルポンプ32、第1クラッチ34、プーリ機構36、第2クラッチ38、ギア機構40および第1ディファレンシャルギア42を介して前輪26aを駆動する。第1モータ16は第3クラッチ46、駆動軸47およびディファレンシャルギア48を介して後輪26bを駆動する。
【0033】
第1モータ16および第2モータ18は、第1PDU22、第2PDU24の制御下に発電機としても作用する。すなわち、第2モータ18は、エンジン14または前輪26aから駆動力を受けて発電を行い、バッテリ15に充電することができ、第1モータ16は後輪26bから駆動力を受けて回生を行い、バッテリ15に充電することができる。
【0034】
また、前輪26aおよび後輪26bには、車速Vを検出する車速センサ50が設けられておりメインECU20に接続されている。
【0035】
バッテリ15の電圧はダウンバータ(D・V)51aで12[V]に降圧され、12V電源制御部51bを介してファン(冷却デバイス)75a、75bに供給される。
【0036】
図2に示すように、駆動制御装置10は、メインECU20を含み、バッテリ15の制御を行うバッテリECU(電力残量検出部)52と、第2PDU24を介して第2モータ18の制御を行うフロントモータECU54と、第1PDU22を介して第1モータ16の制御を行うリアモータECU56と、DBW(Drive By Wire)ドライバ58を介してスロットル開度を制御するスロットルECU60と、燃料噴射量を制御する燃料噴射ECU62と、第3クラッチ46の接続および遮断を行うクラッチドライバ64と、プーリ機構36の制御を行う無段変速機ECU66とを有する。第3クラッチ46には、接続および遮断の検出を行うクラッチスイッチ68が設けられ、クラッチドライバ64に接続されている。
【0037】
バッテリECU52は、バッテリ15に設けられた3つのセンサ、すなわち電流センサ70、電圧センサ72および温度センサ74に接続されている。電流センサ70はバッテリ15への充放電の電流Ibを計測する。電圧センサ72はセル室の電圧Vbを計測する。温度センサ74はバッテリ15の、例えば、セル室内の温度Tbを計測する。
【0038】
バッテリECU52は、バッテリ15の電圧値または充放電量の積分値によってバッテリ15の電力残量SOCを算出する機能を有する。電力残量SOCは0〜100[%]の数値で表され、0[%]のときにはバッテリ15が完全な放電状態または未充電状態であり、100[%]のときには定格充電状態である。
【0039】
第1モータ16および第1PDU22の近傍にはファン75aおよび75bが設けられており、所定の稼動開始温度Tf以上であるときにファン75a、75bを回転させる。
【0040】
燃料噴射ECU62には、カムシャフト回転角の検出を行うTDC(Top DeadCenter)センサ76と、吸入空気圧力の検出を行うMAPセンサ78と、吸入空気温度の検出を行うTA(Temperature of Air)センサ80と、エンジン水温の検出を行う水温センサ82と、エンジン油温の検出を行う油温センサ84と、ブレーキ用マスターパワー負圧の検出を行うM・P(Master Power)モニタ86とが接続されている。また、燃料噴射ECU62には、エンジン14の各気筒部燃料噴射用アクチュエータであるインジェクタ88と、各気筒部燃料点火用アクチュエータである点火プラグ90と、気筒休止切替用に使用される休筒ソレノイド92とが接続されている。
【0041】
無段変速機ECU66には、ドライブプーリ側の回転数の検出を行うDR回転センサ94と、ドリブン側の回転数の検出を行うDN回転センサ96と、シフトレバーのポジション位置を検出するシフトポジションスイッチ98とが接続されている。また、無段変速機ECU66には、ドライブプーリ位置決め用のDRリニアソレノイド100と、ドリブンプーリ位置決め用のDNリニアソレノイド102と、第1クラッチ34の接続および遮断を行う第1クラッチソレノイド104と、第2クラッチ38の接続および遮断を行う第2クラッチソレノイド106とが接続されている。
【0042】
さらに、メインECU20には、アクセルペダルの開度を検出するアクセルセンサ108と、スロットル開度を検出するスロットルセンサ110と、前記の車速センサ50と、ブレーキのオン・オフを検出するブレーキスイッチ114とが接続されている。
【0043】
第1モータ16には温度Tmを検出するモータ温度センサ116が設けられており、第1PDU22には温度Tpを検出するPDU温度センサ118が設けられている。モータ温度センサ116およびPDU温度センサ118はそれぞれリアモータECU56に接続されている。
【0044】
モータ温度センサ116、PDU温度センサ118および前記の温度センサ74は、熱的最弱部または該熱的最弱部の温度を推定可能な箇所に設けるとよい。例えば、モータ温度センサ116は第1モータ16の巻線温度を検出し、PDU温度センサ118は半導体素子のオンチップセンサとするとよい。なお、モータ温度センサ116、PDU温度センサ118の検出結果である温度データはメインECU20へも供給される。
【0045】
第1モータ16が発生する駆動力の特性は、図3のモータ特性線200および202で示すように、車速Vと略反比例の関係にある。また、第1モータ16は、発熱等の関係から、車速Vが車速閾値V2以上であるときには第3クラッチ46を遮断することが好ましい。このとき、第1モータ16の特性上、駆動力は比較的小さい力P0を発生しうる。車速閾値V2は、第1モータ16の定格回転数から設定される。
【0046】
次に、このように構成される駆動制御装置10の作用について説明する。
【0047】
まず、メインECU20が、ROMに記録された第1のプログラムに基づいて行う処理の作用について図4を参照しながら説明する。この第1のプログラムおよび後述する第2〜第8のプログラムは、ROMに記録されており、CPUによって所定の微小時間毎に繰り返し実行される。また、第1〜第8のプログラムは、第3クラッチ46を遮断するタイミングを制御するためのものであり、それ以外の処理、例えば、第3クラッチ46を接続する処理は別のプログラムに基づいて行われる。
【0048】
図4に示すように、最初のステップS1において、メインECU20に接続された各センサの検出値を読み取る。具体的には、車速V、電力残量SOC、第1モータ16の温度Tm、第1PDU22の温度Tp、バッテリ15の温度Tbおよび供給電流等のデータを読み取る。
【0049】
次に、ステップS2において、メインECU20は車速Vと所定の車速閾値V0(図3参照)とを比較する。車速Vが車速閾値V0より小さいときには今回の処理を終了し、車速Vが車速閾値V0より大きいときには次のステップS3へ移る。車速閾値V0は、車速閾値V2(V0<V2)と比較的近い車速として設定されている。
【0050】
ステップS3においては、車速Vと所定の車速閾値V1(V0<V1<V2)とを比較する。車速Vが車速閾値V1より小さいときにはステップS4(駆動力制御部)へ移り、車速Vが車速閾値V1より大きいときにはステップS5へ移る。車速閾値V1は、車速閾値V0と車速閾値V2の間の値であり、車速閾値V0に近い車速として設定されている。
【0051】
ステップS4、つまり、車速Vが車速閾値V0と車速閾値V1との間であるときには、車速Vに基づいて第1モータ16の駆動力をモータ特性線202(図3参照)より減少させるようにする。すなわち、モータ特性線202より小さい駆動力の駆動力線204になるように設定する。この駆動力線204は、車速Vが車速閾値V0と等しいときにモータ特性線202と一致し、車速Vが車速閾値V1と等しいときに駆動力が0となるように設定されており、車速閾値V0から車速閾値V1へ向かい徐々に減少するようになっている。また、駆動力線204は、モータ特性線200と滑らかにつながっている。
【0052】
このステップS4においては、タイマカウンタ(タイマ機能部)Iを0に初期化する。
【0053】
ステップS4で第1モータ16の駆動力を設定した後、このデータをリアモータECU56へ供給して第1モータ16を制御させ、今回の処理を終了する。
【0054】
次に、ステップS5において、車速Vと車速閾値V2とを比較する。車速Vが車速閾値V2より大きいときにはステップS8へ移り、車速Vが車速閾値V2より小さいときには次のステップS6へ移る。
【0055】
ステップS6、つまり、車速Vが車速閾値V1と車速閾値V2との間であるときには、タイマカウンタIを、I←I+1としてカウントアップする。
【0056】
次に、ステップS7において、タイマカウンタIの値と所定の時間閾値C0とを比較する。タイマカウンタIが時間閾値C0より小さいときには、今回の処理を終了し、タイマカウンタIが時間閾値C0と等しいときには次のステップS8へ移る。
【0057】
時間閾値C0は、車速Vが車速閾値V1に達した後、第3クラッチ46が長時間接続状態とならないように、かつ、第3クラッチ46の遮断・接続が頻繁に起こらないように適切な時間に設定されている。ステップS6およびS7で実行されるカウントアップおよび比較の処理はタイマ処理であり、この部分をプログラムによらず、適当な他のタイマに代行させてタイマ割り込みで処理してもよい。
【0058】
ステップS8においては、クラッチドライバ64に対して第3クラッチ46を遮断する指令を供給する。これによってクラッチドライバ64は第3クラッチ46を遮断し、クラッチスイッチ68により遮断したことを確認する。
【0059】
このとき、第1モータ16は駆動力が0となっているので、第3クラッチ46を遮断しても走行駆動力に変化はなく、搭乗者に対して違和感を与えることがない。また、第3クラッチ46により伝達される駆動力が0であるので、遮断時に滑りが生じることがなく第3クラッチ46の耐久性が向上する。また、このステップS8は、車速Vが車速閾値V2より大きいときには必ず実行されるので、第1モータ16の過熱を確実に防止できる。
【0060】
ステップS8の処理が終了した後、今回の処理を終了する。
【0061】
このように第1のプログラムを実行することにより、駆動制御装置10は、車速Vが車速閾値V1に達した後、時間閾値C0で示される時間が経過してから第3クラッチ46を遮断するので、ハンチングの発生しない動作が可能である。また、車速Vが車速閾値V1〜V2の間で走行を続けている場合でも、タイマカウンタIの機能によって、時間閾値C0で示される時間の経過後には第3クラッチ46を遮断することができる。
【0062】
第3クラッチ46の接続中、第1PDU22は第1モータ16の界磁電流制御を行っており、車速Vが高いほど温度上昇も激しいが、第3クラッチ46を遮断することによって界磁電流制御を停止することができる。従って、温度上昇を防止するとともにバッテリ15の電力消費を抑制することができる。
【0063】
次に、メインECU20が、ROMに記録された第2のプログラムに基づいて行う処理の作用について図5および図6を参照しながら説明する。図5のステップS101〜S106は前記のステップS1〜S6と同様の処理であり、ステップS108およびS109は前記のステップS7およびS8と同様の処理である。つまり、ステップS106とS108の間に挿入されたステップS107が異なる。
【0064】
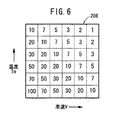
ステップS107においては、図6に示すマップ206を検索して時間閾値C0を決める。マップ206は、車速Vおよび温度Tmをパラメータとした時間閾値C0が記録されたマップであり、車速Vおよび温度Tmがそれぞれ高くなるほど小さい値となるように設定されている。
【0065】
このように、マップ206に基づいて第3クラッチ46を遮断する時間を設定することにより、柔軟な時間設定が可能であり、温度Tmまたは車速Vが変化したときにも確実に第3クラッチ46を遮断し、第1モータ16を保護することができる。特に、温度Tmまたは車速Vが急激に上昇したときには、時間閾値C0が非常に小さい値となって、その時点でタイマカウンタIを下まわることとなり即時に第3クラッチ46を遮断することができる。
【0066】
また、マップ206は、車速Vまたは温度Tmのどちらか一方だけをパラメータとするものでもよい。また、温度Tmに代えて温度Tb(図2参照)または温度Tpをパラメータとしてもよい。時間閾値C0は車速Vおよび温度Tmをパラメータとした式により算出してもよい。
【0067】
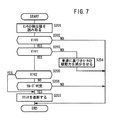
次に、メインECU20が、ROMに記録された第3のプログラムに基づいて行う処理の作用について図7を参照しながら説明する。図7のステップS201〜S205は、前記のステップS1〜S5と同様の処理である。
【0068】
ステップS205の処理後、ステップS206において、ハイブリッド車両12がクルーズ走行(安定走行)しているか否かを判定する。クルーズ走行とは、ハイブリッド車両12が所定時間以上にわたって等速走行をしており、かつ、アクセル開度変化が規定値以内となっていることであり、今回および前回に検出した車速Vの差ΔVと、アクセル開度の差とに基づいて判定することができる。また、クルーズ走行は、単に、所定時間あたりの車速の変化が所定値以下の場合として判定してもよい。
【0069】
ハイブリッド車両12がクルーズ走行をしているときにはステップS207へ移り、クルーズ走行でないときには今回の処理を終了する。
【0070】
ステップS207においては、前記のステップS8と同様に第3クラッチ46を遮断する。
【0071】
このように第3のプログラムを実行することにより、駆動制御装置10は、車速Vが車速閾値V1に達した後にクルーズ判定を行うので、ハイブリッド車両12の走行状態が安定しているときに第3クラッチ46を遮断することができる。クルーズ走行状態においては、四輪駆動走行の必要がなく、むしろ燃費向上が望まれるので、第3クラッチ46を遮断して高速走行時における第1モータ16が非作動時の不要な引きずり損失を減らすことで燃費を向上させることができる。
【0072】
次に、メインECU20が、ROMに記録された第4のプログラムに基づいて行う処理の作用について図8を参照しながら説明する。図8のステップS301〜S305は、前記のステップS1〜S5と同様の処理である。
【0073】
ステップS305の処理後、ステップS306において、第1モータ16の温度Tm、つまりモータ温度センサ116の検出値を所定の温度閾値θ1と比較し、温度Tmが温度閾値θ1より大きいときには、ステップS309へ移り、温度Tmが温度閾値θ1より小さいときにはステップS307へ移る。
【0074】
ステップS307においては、第1PDU22の温度Tpを所定の温度閾値θ2と比較し、温度Tpが温度閾値θ2より大きいときには、ステップS309へ移り、温度Tpが温度閾値θ2より小さいときにはステップS308へ移る。
【0075】
ステップS308においては、バッテリ15の温度Tbを所定の温度閾値θ3と比較し、温度Tbが温度閾値θ3より大きいときには、ステップS309へ移り、温度Tbが温度閾値θ3より小さいときには今回の処理を終了する。
【0076】
温度閾値θ1、θ2、θ3は、それぞれ第1モータ16、第1PDU22およびバッテリ15の稼動許容温度に基づいて設定された閾値である。
【0077】
ステップS309(タイマ機能部)においては、所定のヒステリシス時間が経過したか否かを確認する。このヒステリシス時間は、第3クラッチ46の遮断・接続の処理がハンチングを起こさないように設定されるものであり、適当な時間の閾値が設定されている。ヒステリシス時間が経過しているならばステップS310へ移り、未経過であれば今回の処理を終了する。
【0078】
ステップS310においては、前記のステップS8と同様に第3クラッチ46を遮断する。
【0079】
このように第3のプログラムを実行することにより、駆動制御装置10は、車速Vが車速閾値V1に達した後、第1モータ16、第1PDU22およびバッテリ15の各温度と、第1モータ16、第1PDU22およびバッテリ15の稼動許容温度に基づいて設定された温度閾値θ1、θ2、θ3とにより第3クラッチ46を遮断するので、これらの機器を過熱させることがない。また、機器としての重要性の高い順、つまり、第1モータ16、第1PDU22およびバッテリ15の順に温度の判断を行うので重要な機器をより確実に保護することができる。
【0080】
ステップS306、S307、S308における処理は、それぞれ第1モータ16、第1PDU22およびバッテリ15の温度変化率によって分岐判断を行うようにしてもよい。例えば、ステップS306では、今回および前回に検出した温度差ΔTmと所定の閾値Δθ1とを比較して、温度差ΔTmが閾値Δθ1より大きいときにステップS309へ移るようにしてもよい。このようにすることによって、第1モータ16を過熱から確実に保護することができる。
【0081】
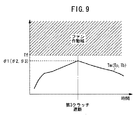
また、ステップS306〜S308における温度に関する温度閾値θ1、θ2、θ3をファン75a、75bの稼動開始温度Tfより低い温度に設定してもよい。この場合、図9に示すように、温度Tm、TpまたはTbが、稼動開始温度Tfに達する以前に第3クラッチ46が遮断されるので第1モータ16、第1PDU22およびバッテリ15の温度上昇が抑制される。結果としてファン75a、75bの作動回数を抑制することができ、ファン75a、75bの駆動部のフリクションロスや駆動電力を低減することができる。
【0082】
次に、メインECU20が、ROMに記録された第5のプログラムに基づいて行う処理の作用について図10を参照しながら説明する。図10のステップS401〜S406は、前記のステップS1〜S6と同様の処理である。
【0083】
ステップS406の処理後、ステップS407において、タイマカウンタIの値と所定の時間閾値C0とを比較する。タイマカウンタIが時間閾値C0より小さいときには、ステップS408へ移り、タイマカウンタIが時間閾値C0と等しいときにはステップS411へ移る。
【0084】
ステップS408〜S410は、それぞれ前記のステップS306〜S308と同様の処理であり、条件が成立する場合にはステップS411へ移る。
【0085】
ステップS411においては、前記のステップS8と同様に第3クラッチ46を遮断する。
【0086】
このように第5のプログラムを実行することにより、駆動制御装置10は、車速Vが車速閾値V1に達した後、第1モータ16、第1PDU22およびバッテリ15の各温度Tm、Tp、Tbに基づいて第3クラッチ46を遮断するので、第1モータ16、第1PDU22およびバッテリ15を過熱から防ぐことができる。また、タイマ機能を組み合わせているので、温度Tm、Tp、Tbの上昇が微小であるときにも、適当な時間経過後に第3クラッチ46を確実に遮断することができる。
【0087】
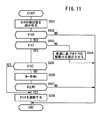
次に、メインECU20が、ROMに記録された第6のプログラムに基づいて行う処理の作用について図11および図12を参照しながら説明する。図11の、ステップS501〜S505は、前記のステップS1〜S5と同様の処理である。ただし、ステップS504においては、前記タイマカウンタIの代わりに発熱積算カウンタWを初期化する。
【0088】
ステップS505の処理後、ステップS506において、発熱積算カウンタWに第1モータ16の発熱量Wnを累積加算し、W←W+Wnとする。この発熱量Wnは、第1モータ16に対する供給電流、等価抵抗および放熱面積等から算出されるものである。
【0089】
ステップS507において、発熱積算カウンタWと所定の発熱量閾値W0を比較する。発熱積算カウンタWが発熱量閾値W0より小さいときには、今回の処理を終了し、発熱積算カウンタWが発熱量閾値W0と等しいか、または大きいときにはステップS508へ移る。
【0090】
ステップS508においては、前記のステップS8と同様に第3クラッチ46を遮断する。
【0091】
このように第6のプログラムを実行することにより、駆動制御装置10は、車速Vが車速閾値V1に達した後、第1モータ16の発熱量Wnに基づいて処理を行うので、仮に、モータ温度センサ116が設けられていない場合であっても、第3クラッチ46を遮断することができ、第1モータ16の過熱を防止することができる。
【0092】
発熱量を算出する対象は、第1モータ16以外に、第1PDU22またはバッテリ15等として、第1PDU22、バッテリ15等の過熱を防止するようにしてもよい。バッテリ15の発熱量は電流センサ70の検出値に基づいて算出することができる。
【0093】
また、ステップS506における発熱積算カウンタWの累積加算を、W←W+Wn+N0と、定数N0を付け加えてもよい。この場合、発熱量Wnが微小値であっても発熱積算カウンタWは増加し続け、所定時間経過後には第3クラッチ46を遮断することができる。つまり、タイマ機能を付加することができる。
【0094】
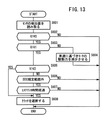
次に、メインECU20が、ROMに記録された第7のプログラムに基づいて行う処理の作用について図13および図14を参照しながら説明する。図13の、ステップS601〜S605は、前記のステップS1〜S5と同様の処理である。
【0095】
ステップS605の処理後、ステップS606において、電力残量SOCが規定範囲、つまり所定の電力残量閾値B1およびB2の範囲内であるか否かを確認する。
【0096】
電力残量閾値B1は比較的小さい値であり、バッテリ15の電力残量SOCが小さく過放電に近いことを示す。電力残量閾値B2は比較的大きい値であり、バッテリ15の電力残量SOCが大きく十分な充電状態であることを示す。
【0097】
電力残量SOCが電力残量閾値B1およびB2の間であるときにはステップS607へ移り、電力残量SOCが電力残量閾値B1およびB2の範囲外であるときには今回の処理を終了する。
【0098】
ステップS607においては、所定のヒステリシス時間が経過したか否かを確認する。このヒステリシス時間は、第3クラッチ46の遮断・接続の処理がハンチングを起こさないように設定されるものであり、適当な時間の閾値が設定されている。ヒステリシス時間が経過しているならばステップS608へ移り、未経過であれば今回の処理を終了する。
【0099】
ステップS608においては、前記のステップS8と同様に第3クラッチ46を遮断する。第3クラッチ46を遮断することにより、第1モータ16を励磁する必要がなくなるのでバッテリ15の消費電流が少なくなり、図14に示すように、電力残量SOCが増加に転じる。
【0100】
このように第7のプログラムを実行することにより、駆動制御装置10は、車速Vが車速閾値V1に達した後、電力残量SOCに基づいて第3クラッチ46を遮断することができる。
【0101】
電力残量SOCが電力残量閾値B1より小さいときには、第3クラッチ46を遮断するとともに、第1モータ16の励磁を停止することによってバッテリ15の電力消費を低減し、過放電を防止することができる。また、電力残量SOCが電力残量閾値B2より大きいときには回生処理が不要であることから、第3クラッチ46を遮断することができる。
【0102】
また、ステップS606における処理は、電力残量SOCの変化率によって分岐判断を行うようにしてもよい。例えば、今回および前回に検出したそれぞれの電力残量SOCの差ΔSOCと所定の閾値ΔBとを比較して、差ΔSOCの絶対値が閾値ΔBより大きいときにステップS607へ移るようにしてもよい。このようにすることによって、バッテリ15を保護することができる。
【0103】
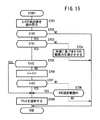
次に、メインECU20が、ROMに記録された第8のプログラムに基づいて行う処理の作用について図15を参照しながら説明する。図15のステップS701〜S706は、前記のステップS1〜S6と同様の処理である。
【0104】
ステップS706の処理後、ステップS707において、タイマカウンタIの値と所定の時間閾値C0とを比較する。タイマカウンタIが時間閾値C0より小さいときには、ステップS708へ移り、タイマカウンタIが時間閾値C0と等しいときにはステップS709へ移る。
【0105】
ステップS708においては、電力残量SOCが規定範囲、つまり所定の電力残量閾値B1とB2との間であるか否かを確認する。このステップS708の処理は、前記のステップS606と同様の処理である。
【0106】
ステップS709においては、前記のステップS8と同様に第3クラッチ46を遮断する。
【0107】
このように第8のプログラムを実行することにより、駆動制御装置10は、車速Vが車速閾値V1に達した後、電力残量SOCの値とタイマ機能とにより第3クラッチ46を遮断することができる。従って、電力残量SOCが規定範囲内であっても、タイマカウンタIの機能によって、時間閾値C0で示される時間の経過後には第3クラッチ46を遮断することができる。
【0108】
上述したように、本実施の形態に係る駆動制御装置10は、車速Vが車速閾値V0を超えた時点から、車速Vに応じて第1モータ16の駆動力を徐々に減少させるようにしている。また、第3クラッチ46を遮断するとき、つまり車速Vが、ヒステリシス範囲として作用する車速閾値V1〜V2の間にあるときには、第1モータ16の駆動力を0としているので遮断時の駆動力の変化がなく、もちろん、ショックもない。
【0109】
車速Vが車速閾値V1〜V2の間において、車速V以外の条件、すなわち、電力残量SOCの値、第1モータ16、バッテリ15、第1PDU22の各温度Tm、Tp、Tbまたは発熱量を示す発熱積算カウンタW、時間経過を示すタイマカウンタIおよびクルーズ走行判定結果等に基づいて第3クラッチ46を遮断するので、遮断・接続の頻度を減らすとともに、第1モータ16が駆動力0で稼動する時間を低減することができる。従って、第1モータ16および第3クラッチ46の耐久性を向上させるとともにバッテリ15の励磁に要する消費電力を低減することができる。
【0110】
さらに、これらの条件によって第3クラッチ46を遮断することにより、第3クラッチ46の遮断・接続は頻繁に発生することがなく、車速閾値V1を車速閾値V2に対する近い高速域に設定することができる。しかも、第1モータ16は高速域まで駆動力を発生させることができ、高速走行時の燃費を向上させることができる。
【0111】
さらにまた、図3からも明らかなように、第1モータ16が発生する駆動力は、車速Vによって一義的に決まるので搭乗者に対して違和感を与えることがない。
【0112】
駆動制御装置10によれば、タイマ機能や電力残量SOCの値等に拘わらず、車速Vが第1モータ16の定格回転数から設定される車速閾値V2に達したときには、第3クラッチ46を必ず遮断するので、第1モータ16を確実に保護することができる。
【0113】
電力残量SOCの値、第1モータ16、バッテリ15、第1PDU22の各温度Tm、Tp、Tbまたは発熱量を示す発熱積算カウンタW、時間経過を示すタイマカウンタIおよびクルーズ走行判定等に係る処理は適宜組み合わせて第3クラッチ46を遮断する条件判断を行ってもよい。
【0114】
本発明に係るハイブリッド車両の駆動制御装置は、上述の実施の形態に限らず、本発明の要旨を逸脱することなく、種々の構成を採りうることはもちろんである。
【0115】
【発明の効果】
以上説明したように、本発明に係るハイブリッド車両の駆動制御装置によれば、エンジンおよびモータを有するハイブリッド車両において、モータと駆動軸との間のクラッチを遮断する際に、走行駆動力の変化を減少させるとともにクラッチを遮断するタイミングを高速域に設定することができ、さらにモータやインバータ等の過熱を防止するという効果を達成することができる。
【図面の簡単な説明】
【図1】ハイブリッド車両の駆動系部分のブロック図である。
【図2】本実施の形態に係るハイブリッド車両の駆動制御装置を示すブロック図である。
【図3】車速に対するモータの駆動力を示すグラフである。
【図4】第1のプログラムによる駆動制御装置の処理手順を示すフローチャートである。
【図5】第2のプログラムによる駆動制御装置の処理手順を示すフローチャートである。
【図6】車速と温度とに対する時間閾値が設定されたマップを示す図である。
【図7】第3のプログラムによる駆動制御装置の処理手順を示すフローチャートである。
【図8】第4のプログラムによる駆動制御装置の処理手順を示すフローチャートである。
【図9】第4のプログラムを実行した際のモータの温度変化を示すグラフである。
【図10】第5のプログラムによる駆動制御装置の処理手順を示すフローチャートである。
【図11】第6のプログラムによる駆動制御装置の処理手順を示すフローチャートである。
【図12】第6のプロフラムを実行した際の発熱積算カウンタの変化を示すグラフである。
【図13】第7のプログラムによる駆動制御装置の処理手順を示すフローチャートである。
【図14】第7のプログラムを実行した際の電力残量の変換を示すグラフである。
【図15】第8のプログラムによる駆動制御装置の処理手順を示すフローチャートである。
【符号の説明】
10…駆動制御装置 12…ハイブリッド車両
14…エンジン 15…バッテリ
16、18…モータ 20…メインECU
22、24…PDU 28、47…駆動軸
34、38、46…クラッチ 36…プーリ機構
50…車速センサ 75a、75b…ファン
52…バッテリECU 54…フロントモータECU
56…リアモータECU 58…DBWドライバ
60…スロットルECU 62…燃料噴射ECU
64…クラッチドライバ 66…無段変速機ECU
70…電流センサ 72…電圧センサ
74…温度センサ 108…アクセルセンサ
110…スロットルセンサ 114…ブレーキスイッチ
116…モータ温度センサ 118…PDU温度センサ
200、202…モータ特性線 204…駆動力線
C0…時間閾値 I…タイマカウンタ
SOC…電力残量 Tf…稼動開始温度
Tm、Tp、Tb…温度 V…車速
V0、V1、V2…車速閾値 W…発熱積算カウンタ
θ1、θ2、θ3…温度閾値
Claims (12)
- 前後軸の一方をエンジンで駆動し、他方をモータにより駆動して走行するハイブリッド車両の駆動制御装置であって、
前記モータと駆動軸とを接続または遮断するクラッチと、
前記モータの駆動力を制御する駆動力制御部と、
前記ハイブリッド車両の車速を検出する速度検出部と、
前記クラッチを接続または遮断するタイミングを判定し、該タイミングに基づいて前記クラッチを操作するクラッチ制御部と、
を有し、
前記ハイブリッド車両の増速時、前記駆動力制御部は、前記車速に基づいて前記モータの駆動力を徐々に減少させ、前記車速が所定の車速閾値に達したときに前記モータの駆動力を0にし、
前記クラッチ制御部は、前記車速が前記車速閾値を超えたことを1つの条件として前記クラッチを遮断することを特徴とするハイブリッド車両の駆動制御装置。 - 請求項1記載の駆動制御装置において、
前記モータを駆動する駆動回路と、
前記モータに電力を供給するバッテリと、
を有し、
前記車速閾値は、第1車速閾値およびそれより大きい第2車速閾値からなり、
前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記モータ、前記駆動回路および/または前記バッテリの状態に基づいて前記クラッチを遮断し、前記車速が前記第2車速閾値以上であるとき、前記状態に係ることなく前記クラッチを遮断することを特徴とするハイブリッド車両の駆動制御装置。 - 請求項2記載の駆動制御装置において、
前記モータ、前記駆動回路および/または前記バッテリの温度を検出する温度検出部と、
タイマ機能部と、
を有し、
前記タイマ機能部は、前記車速が前記第1車速閾値に達したときに計時を開始し、
前記クラッチ制御部は、前記モータ、前記駆動回路および/または前記バッテリの温度、並びに、前記車速に基づいて前記クラッチの遮断時間を設定し、
前記タイマ機能部による計測時間が、前記遮断時間に達したことを1つの条件として前記クラッチを遮断することを特徴とするハイブリッド車両の駆動制御装置。 - 請求項2記載の駆動制御装置において、
前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記ハイブリッド車両が安定走行していることを1つの条件として前記クラッチを遮断することを特徴とするハイブリッド車両の駆動制御装置。 - 請求項4記載の駆動制御装置において、
前記ハイブリッド車両の安定走行は、所定時間あたりの車速の変化が所定値以下の場合であることを特徴とするハイブリッド車両の駆動制御装置。 - 請求項2記載の駆動制御装置において、
前記モータ、前記駆動回路および/または前記バッテリの温度を検出する温度検出部と、
タイマ機能部と、
を有し、
前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記温度検出部が検出する温度が所定温度以上の状態で、かつその状態が所定時間連続していることが前記タイマ機能部によって検出されたことを1つの条件として前記クラッチを遮断することを特徴とするハイブリッド車両の駆動制御装置。 - 請求項2記載の駆動制御装置において、
前記モータ、前記駆動回路および/または前記バッテリの温度を検出する温度検出部を有し、
前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記温度検出部に基づいて算出された温度変化率が所定の閾値以上であることを1つの条件として前記クラッチを遮断することを特徴とするハイブリッド車両の駆動制御装置。 - 請求項2記載の駆動制御装置において、
前記モータ、前記駆動回路および/または前記バッテリの温度を検出する温度検出部と、
前記モータ、前記駆動回路および/または前記バッテリが所定の稼動開始温度以上であるときに前記モータ、前記駆動回路および/または前記バッテリの冷却を行う冷却デバイスと、
を有し、
前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記温度検出部が検出する温度が、前記稼動開始温度より低温の閾値温度以下であることを1つの条件として前記クラッチを遮断することを特徴とするハイブリッド車両の駆動制御装置。 - 請求項2記載の駆動制御装置において、
前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記モータの発熱量を算出し、該発熱量の累積加算値が所定の熱量閾値に達したことを1つの条件として前記クラッチを遮断することを特徴とするハイブリッド車両の駆動制御装置。 - 請求項2記載の駆動制御装置において、
前記バッテリの電力残量を検出する電力残量検出部を有し、
前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記電力残量が設定された第1電力残量閾値以下、または、前記第1電力残量閾値より大きい第2電力残量閾値以上であることを1つの条件として前記クラッチを遮断することを特徴とするハイブリッド車両の駆動制御装置。 - 請求項2記載の駆動制御装置において、
前記モータに電力を供給するバッテリと、
前記バッテリの電力残量を検出する電力残量検出部と、
を有し、
前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記電力残量の変化率が所定の閾値以上であることを1つの条件として前記クラッチを遮断することを特徴とするハイブリッド車両の駆動制御装置。 - 請求項2〜11のいずれか1項に記載の駆動制御装置において、
前記クラッチ制御部は、前記車速が前記第1車速閾値から前記第2車速閾値の間であるとき、前記車速が前記第1車速閾値以上となっている時間を計測し、該時間が所定の時間閾値に達したことを1つの条件として前記クラッチを遮断することを特徴とするハイブリッド車両の駆動制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002376299A JP3817515B2 (ja) | 2002-12-26 | 2002-12-26 | ハイブリッド車両の駆動制御装置 |
| US10/739,099 US6932738B2 (en) | 2002-12-26 | 2003-12-19 | Drive control apparatus for hybrid vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002376299A JP3817515B2 (ja) | 2002-12-26 | 2002-12-26 | ハイブリッド車両の駆動制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004208445A true JP2004208445A (ja) | 2004-07-22 |
| JP3817515B2 JP3817515B2 (ja) | 2006-09-06 |
Family
ID=32813793
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002376299A Expired - Fee Related JP3817515B2 (ja) | 2002-12-26 | 2002-12-26 | ハイブリッド車両の駆動制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3817515B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010208520A (ja) * | 2009-03-11 | 2010-09-24 | Aisin Ai Co Ltd | 車両の動力伝達制御装置 |
| JP2011246066A (ja) * | 2010-05-28 | 2011-12-08 | Toyota Motor Corp | 車両の駆動制御装置 |
| JP2012091759A (ja) * | 2010-10-29 | 2012-05-17 | Aisin Seiki Co Ltd | 車両駆動装置 |
| JP2013177131A (ja) * | 2006-01-09 | 2013-09-09 | General Electric Co <Ge> | ハイブリッド車両およびその組み立て方法 |
| JP2018008648A (ja) * | 2016-07-15 | 2018-01-18 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP2018179294A (ja) * | 2017-04-03 | 2018-11-15 | アルストム トランスポート テクノロジーズ | 切り替え可能駆動システム |
| JP2023522729A (ja) * | 2020-04-21 | 2023-05-31 | ジャガー ランド ローバー リミテッド | 電気機械制御装置及び方法 |
| US20250187433A1 (en) * | 2023-12-06 | 2025-06-12 | Ford Global Technologies, Llc | System and method for allocating battery power for electric vehicles with a disconnect clutch |
-
2002
- 2002-12-26 JP JP2002376299A patent/JP3817515B2/ja not_active Expired - Fee Related
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013177131A (ja) * | 2006-01-09 | 2013-09-09 | General Electric Co <Ge> | ハイブリッド車両およびその組み立て方法 |
| JP2010208520A (ja) * | 2009-03-11 | 2010-09-24 | Aisin Ai Co Ltd | 車両の動力伝達制御装置 |
| JP2011246066A (ja) * | 2010-05-28 | 2011-12-08 | Toyota Motor Corp | 車両の駆動制御装置 |
| JP2012091759A (ja) * | 2010-10-29 | 2012-05-17 | Aisin Seiki Co Ltd | 車両駆動装置 |
| JP2018008648A (ja) * | 2016-07-15 | 2018-01-18 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP2018179294A (ja) * | 2017-04-03 | 2018-11-15 | アルストム トランスポート テクノロジーズ | 切り替え可能駆動システム |
| JP7311107B2 (ja) | 2017-04-03 | 2023-07-19 | アルストム トランスポート テクノロジーズ | 切り替え可能駆動システム |
| JP2023522729A (ja) * | 2020-04-21 | 2023-05-31 | ジャガー ランド ローバー リミテッド | 電気機械制御装置及び方法 |
| EP4139160B1 (en) * | 2020-04-21 | 2025-03-19 | Jaguar Land Rover Limited | Apparatus and method for controlling an electric machine of a vehicle |
| JP7682921B2 (ja) | 2020-04-21 | 2025-05-26 | ジャガー ランド ローバー リミテッド | 電気機械制御装置及び方法 |
| US12319270B2 (en) | 2020-04-21 | 2025-06-03 | Jaguar Land Rover Limited | Apparatus and method for controlling an electric machine of a vehicle |
| US20250187433A1 (en) * | 2023-12-06 | 2025-06-12 | Ford Global Technologies, Llc | System and method for allocating battery power for electric vehicles with a disconnect clutch |
Also Published As
| Publication number | Publication date |
|---|---|
| JP3817515B2 (ja) | 2006-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6932738B2 (en) | Drive control apparatus for hybrid vehicle | |
| US7686112B2 (en) | Apparatus and method for controlling hybrid vehicle | |
| JP3817516B2 (ja) | ハイブリッド車両の駆動制御装置 | |
| JP5799127B2 (ja) | ハイブリッド車両の制御装置 | |
| US6962224B2 (en) | Hybrid vehicle employing hybrid system | |
| JP3633357B2 (ja) | 車両のモータ駆動制御装置 | |
| CN101209711B (zh) | 用于混合动力车辆的模式转换控制装置 | |
| EP1862364B1 (en) | Vehicle Control | |
| JP2002369578A (ja) | 電動モータの制御装置及びハイブリッド車両の制御装置 | |
| JP2002058112A (ja) | ハイブリッド車両の制御装置 | |
| CN106004869A (zh) | 混合动力车辆 | |
| US20120323461A1 (en) | Method and apparatus for controlling hybrid powertrain system in response to engine temperature | |
| JP2009035121A (ja) | ハイブリッド車両の内燃機関の始動制御装置 | |
| JP3817515B2 (ja) | ハイブリッド車両の駆動制御装置 | |
| JP3924540B2 (ja) | ハイブリッド車両の駆動制御装置 | |
| JP3915689B2 (ja) | 車両制御装置及びその車両制御装置を備えたハイブリッド車両 | |
| JP2005185065A (ja) | 車両の駆動力制御装置 | |
| JP2003009307A (ja) | ハイブリッド車両のジェネレータ制御装置 | |
| JP7470033B2 (ja) | ハイブリッド車両 | |
| JP3951957B2 (ja) | 動力出力装置及びその制御方法並びに車両 | |
| JP2002155777A (ja) | 車両駆動装置 | |
| JP5699533B2 (ja) | ハイブリッド車両の制御装置 | |
| CN113954816B (zh) | 混合动力电动汽车 | |
| JP6591872B2 (ja) | 自動車 | |
| JP2016124485A (ja) | ハイブリッド自動車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050719 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050909 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060606 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060612 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 3817515 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090616 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100616 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110616 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110616 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130616 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130616 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140616 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |