JP2004232467A - 内燃機関の吸気弁駆動制御装置 - Google Patents
内燃機関の吸気弁駆動制御装置 Download PDFInfo
- Publication number
- JP2004232467A JP2004232467A JP2003018218A JP2003018218A JP2004232467A JP 2004232467 A JP2004232467 A JP 2004232467A JP 2003018218 A JP2003018218 A JP 2003018218A JP 2003018218 A JP2003018218 A JP 2003018218A JP 2004232467 A JP2004232467 A JP 2004232467A
- Authority
- JP
- Japan
- Prior art keywords
- angle
- operating angle
- variable valve
- valve mechanism
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
















Landscapes
- Output Control And Ontrol Of Special Type Engine (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
Abstract
【解決手段】アクセル操作により目標トルクtTeが上昇したときに、過渡の初期は第1可変動弁機構によって作動角が変化し、過渡の後期は第2可変動弁機構によって中心角が変化するが、過渡変化の途中で定常時の理想的な特性からずれないように、VTC制御領域に入ったら作動角の目標値に所定量上乗せして第1可変動弁機構による作動角の変更速度を速め、その間、第2可変動弁機構を停止させる。作動角が目標値に達したら、第2可変動弁機構を通常時よりも速い変更速度で動かす。これにより、最大リフト点の推移が、定常時の理想的な特性に近付く。
【選択図】 図15
Description
【発明の属する技術分野】
この発明は、内燃機関の吸気弁の動弁機構として、吸気弁の作動角を変更する第1可変動弁機構と作動角の中心角を変更する第2可変動弁機構とを備えてなる内燃機関の吸気弁駆動制御装置に関する。
【0002】
【従来の技術】
内燃機関の低速低負荷時における燃費の改善や安定した運転性並びに高速高負荷時における吸気充填効率の向上による十分な出力の確保、などのために、吸気弁の作動角やその中心角を機関運転状態に応じて変えることができる吸気弁駆動制御装置が従来から種々提案されている。
【0003】
特許文献1および特許文献2は、いずれも本出願人が先に提案したものであるが、吸気弁の可変動弁機構として、吸気弁のリフト・作動角を同時にかつ連続的に拡大,縮小可能なリフト・作動角可変機構と、リフトの中心角の位置を連続的に遅進させる位相可変機構と、を備え、機関運転状態に応じて、吸気弁の作動角とその中心角とを、互いに独立して適切に可変制御することにより、燃費の改善や出力の向上を図った技術が開示されている。
【0004】
このように2つの可変動弁機構を備えた吸気弁駆動制御装置では、運転状態に応じて、それぞれの目標値が与えられ、これに沿って各可変動弁機構が制御されることになる。
【0005】
【特許文献1】
特開2001−263105号公報
【0006】
【特許文献2】
特開2002−256905号公報
【0007】
【発明が解決しようとする課題】
しかしながら、このように機関運転状態に応じて、吸気弁の作動角およびその中心角を互いに独立して適切に可変制御しようとする場合、運転状態が急に変化するとき、例えば、要求負荷が低負荷域から高負荷域へ比較的速い速度で変化する過渡状態においては、リフト・作動角可変機構と位相可変機構の双方が目標値を追従しようと動作するが、リフト・作動角可変機構と位相可変機構とのそれぞれの応答性が異なるため、その変化の途中では、定常状態で求めた燃費の良い設定に必ずしもならない。従って、目標とする燃費性能を得られない可能性がある。
【0008】
特に、バルブオーバラップや有効圧縮比を左右する吸気弁開時期および吸気弁閉時期は、作動角と中心角との組み合わせにより決定されるが、過渡の態様により、変化の途中で2つの可変動弁機構が同時に動く状態があると、定常状態で定めた最良燃費の設定からずれてしまい、例えば、期待していたほどの残留ガスが吸気に取り込まれず、そのためポンピングロスの低減が図れずに、目標とする燃費性能を得られない、といった可能性がある。
【0009】
この発明は、過渡時の各可変動弁機構の動作速度を補正することで、過渡変化中の燃費のより一層の向上を図ることを目的としている。
【0010】
【課題を解決するための手段】
本発明に係る内燃機関の吸気弁駆動制御装置は、吸気弁の作動角を連続的に変更可能な第1可変動弁機構と、上記作動角の中心角を連続的に変更可能な第2可変動弁機構と、を備えており、低負荷側の第1負荷領域では主に上記作動角を変更して吸入空気量を調整するとともに高負荷側の第2負荷領域では主に上記中心角を変更して吸入空気量を調整するように構成されている。
【0011】
そして、第1の発明では、負荷に応じて目標作動角を設定する目標作動角設定手段と、負荷が上記第2負荷領域にありかつ上記作動角が上記目標作動角に到達していないとき、上記第1可変動弁機構の作動角変更速度を通常時よりも大きくする作動角変更速度補正手段と、を備えている。
【0012】
また、第2の発明では、負荷が上記第2負荷領域にありかつ上記作動角が上記目標作動角に到達していないとき、上記第2可変動弁機構の中心角変更速度を通常時よりも小さくする中心角変更速度補正手段を備えている。
【0013】
上記の作動角変更速度の補正や中心角変更速度の補正は、目標作動角もしくは目標中心角を補正することにより行うことができる。あるいは、アクチュエータの制御ゲインの補正により行うこともできる。
【0014】
さらに、第3の発明では、負荷に応じて目標中心角を設定する目標中心角設定手段と、負荷が上記第1負荷領域にありかつ上記中心角が上記目標中心角に到達していないとき、上記第2可変動弁機構の中心角変更速度を通常時よりも大きくする中心角変更速度補正手段と、を備えている。
【0015】
また、第4の発明では、負荷が上記第1負荷領域にありかつ上記中心角が上記目標中心角に到達していないとき、上記第1可変動弁機構の作動角変更速度を通常時よりも小さくする作動角変更速度補正手段を備えている。
【0016】
上記の第1の発明および第2の発明は、要求負荷が比較的速い速度で増加したときの過渡変化に対応するものである。以下、これを説明する。
【0017】
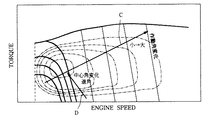
図1,図2は、前述した特許文献1に開示されている第1,第2可変動弁機構による作動角およびその中心角の制御の設定例を示すもので、機関の負荷(トルク)および回転速度をパラメータとする吸気弁の作動角(実線)およびその中心角(一点鎖線)の特性を三次元マップの形で示している。図1の矢印Cは作動角の増加方向を表しており、矢印Dは中心角の進角方向を表している。また、図3は、図2のF1〜F4時の作動角(吸気弁開時期、閉時期)を示す。
【0018】
低負荷域▲1▼では、負荷の増加に応じて、作動角を略一定として中心角を進角させる(F1→F2)。中負荷域▲2▼では、負荷の増加に応じて、中心角を略一定として作動角を増加させる(F2→F3)。高負荷域▲3▼では、負荷の増加に応じて、作動角を略一定として中心角を遅角させる(F3→F4)。
【0019】
低負荷域の中でも特に負荷の小さい極低負荷時には、吸気弁の閉時期が相対的に下死点側に遅角しており、これにより有効圧縮比が増し、燃焼の安定化が図られる。吸気弁の開時期は相対的に上死点から離れるように遅角しており、開弁時の差圧が増してガス流動が強化され、燃焼の安定化が図られるとともに、作動角が抑制され、フリクションの低減を図ることができる。
【0020】
また、低負荷域では、負荷の増加に伴って、吸気弁の閉時期が相対的に下死点から離れるように進角するため、必要な空気量に対するスロットル弁開度が増してポンピングロスが低減され、燃費の向上が図られる。そして吸気弁の開時期が相対的に上死点側へ進角するため、ポンピングロスが低減され、燃費の向上を図ることができる。
【0021】
中負荷域では、負荷の増加に伴って、開時期が進角して排気弁とのバルブオーバラップが増加することにより、残留ガスが吸気に取り込まれて、ポンピングロスの低減化が図られる。このバルブオーバラップの増加による吸入空気中の新気の減少は、閉時期が遅角することにより補うことができる。従って、安定した燃焼を確保しつつ、燃費の改善を図ることができる。
【0022】
高負荷域では、負荷の増加に伴って、開時期を相対的に遅角させて上死点側へ戻すことにより、バルブオーバラップによる残留ガスの割合を低減しつつ、閉時期を下死点側へ適宜に遅角させて充填効率を向上させることにより、出力トルクの向上を図ることができる。
【0023】
しかしながら、要求負荷が低負荷域から高負荷域へ比較的早い速度で変化する過渡状態においては、前述したように、第1,第2可変動弁機構それぞれの応答性が異なるため、定常状態で定めた燃費の良い設定に必ずしもならない。
【0024】
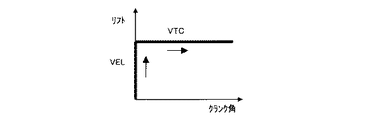
説明を容易にするため、図4に示すように、低〜中負荷域(第1負荷領域)では第1可変動弁機構のみを操作し、中〜高負荷域(第2負荷領域)では第2可変動弁機構のみを操作する設定を想定する。例えば、第1可変動弁機構としては、図5(a)に示すように、作動角とともにリフトが拡大・縮小する機構とすると、最大リフト点は、作動角の増加に伴って高くなる。また第2可変動弁機構では、図5(b)に示すように、中心角の位相が変化するが、負荷の増加に対し中心角が遅角するとすると、最大リフト点も遅角する。従って、この単純化した設定例では、低負荷から高負荷へ徐々に変化したときに、吸気弁の最大リフト点は、図6に示すように推移する。つまり、負荷の増加に伴って最初は第1可変動弁機構(VELと略称する)のみが作動して最大リフト点は徐々に高リフトとなり、次に、第2可変動弁機構(VTCと略称する)のみが作動して徐々に遅角する。
【0025】
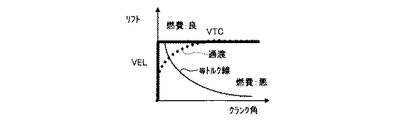
このような定常状態で理想的な設定に対し、要求負荷が低負荷域から高負荷域へ比較的速い速度で変化する過渡状態を考えると、図7に示すように、(a)の運転者のアクセル操作に対し、(b)の線b2のようにトルク目標値tTeが与えられる。ここでは、アクセルと同等の目標値演算ではトルク応答が過敏すぎる場合を想定しているので、トルク目標値tTeは、線b1で示すアクセル操作による要求トルク値に遅れ処理を施したものとなる。そして、アクチュエータの遅れなどにより、最終的な実トルクは、線b3に示すように変化する。上記のトルク目標値に応じて、過渡初期は作動角のみが変化し(c)、過渡後期は中心角のみが変化する(d)。なお、(c)および(d)において、線c2,d2がそれぞれの目標値、線c3,d3が実値を示す。また線c1,d1は、(b)の線b1に対応するそれぞれの仮想の特性である。(c),(d)の線c2,d2で示す目標値の関係のように、仮に、ある負荷(第1負荷領域と第2負荷領域の境界)までは作動角のみを変化させ、それ以上の負荷では中心角のみを変化させるように設定したとしても、各動弁機構の応答性に起因して、それぞれの実際の変化を示す線c3,d3の関係から明らかなように、第1,第2可変動弁機構の双方が同時に動いている領域が存在する。この結果、最大リフト点の推移を見ると、図8の点線で示すような特性となり、定常状態での理想的な設定と異なってしまうのである。その結果、例えば、期待していたほどの残留ガスが吸気に取り込まれない、等の事態が生じる。
【0026】
図9に等トルク線として示すように、同一トルクを実現するための作動角および中心角の設定は、多数存在する。そして、その中でも、リフト・作動角が大きく、かつ中心角が上死点寄りの設定の方が、燃費が良い。また、第1,第2可変動弁機構は、必ずしも常に応答性限界の速度で動作しているのではない。
【0027】
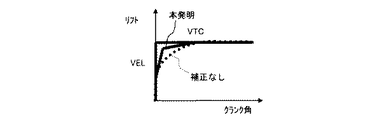
そこで、第1の発明では、上記のような過渡時に、第1,第2可変動弁機構の双方が同時に動いている領域において、第1可変動弁機構の作動角変更速度を通常時よりも大きくすることで、点線で示した特性を、図10の実線に示すように、定常状態での理想的な設定により近付けることができる。従って、補正無しの場合と同等のトルク応答性を確保しながら、燃費の向上を期待できる。
【0028】
また、第2の発明では、逆に、第2可変動弁機構の中心角変更速度を通常時よりも小さくすることで、上記と同様に、点線で示した特性を、図10の実線に示すように、定常状態での理想的な設定により近付けることができる。
【0029】
第3の発明および第4の発明は、要求負荷が比較的速い速度で減少したときの過渡変化に対応するものである。この場合も、補正無しであれば、実際の作動角および中心角の設定が定常状態での理想的な設定から離れてしまうが、第3の発明のように、第2可変動弁機構の中心角変更速度を通常時よりも大きくし、あるいは、第4の発明のように、第1可変動弁機構の作動角変更速度を通常時よりも小さくすることで、定常状態での理想的な設定により近付けることができる。
【0030】
【発明の効果】
この発明に係る内燃機関の吸気弁駆動制御装置によれば、作動角を変更する第1可変動弁機構とその中心角を変更する第2可変動弁機構とが同時に動きうる過渡時に、作動角および中心角の変化途中の特性を、定常状態で定めた燃費最良の特性により近付けることができ、一層の燃費向上を達成することができる。
【0031】
【発明の実施の形態】
以下、この発明の好ましい実施の形態を図面に基づいて詳細に説明する。
【0032】
図11は、この発明に係る内燃機関の吸気弁駆動制御装置のシステム構成を示す構成説明図であって、内燃機関1は、吸気弁2と排気弁3とを有し、かつ吸気弁2の動弁機構として、吸気弁2のリフト・作動角を連続的に拡大・縮小させる(図5(a)参照)ことが可能な第1可変動弁機構(VEL)5および作動角の中心角を連続的に遅進させる(図5(b)参照)ことが可能な第2可変動弁機構(VTC)6を備えている。また、吸気通路7には、モータ等のアクチュエータにより開度が制御される電子制御スロットル弁(ETC)8が設けられている。これらの第1,第2可変動弁機構5,6および電子制御スロットル弁8は、エンジンコントローラ(ECM)9によって制御される。すなわち、アクセル開度センサ(APS)10(図12参照)、クランク角センサ11、吸入負圧(Boost)センサ12、等の検出信号がエンジンコントローラ9に入力され、該エンジンコントローラ9は、アクセル開度APO、エンジン回転数Ne、吸入負圧Boost等に基づいて、運転者が要求するトルクを発生するように、目標作動角tVEL、目標中心角tVTC、目標スロットル開度tTVOを決定し、各機構のアクチュエータを駆動する。上記第1可変動弁機構5および第2可変動弁機構6は、その機械的な構成は公知であり、例えば、上述した特許文献1に記載の装置と同様の構成を有している。従って、その詳細な説明は省略する。
【0033】
なお、図示は省略するが、通常の内燃機関と同様に、燃料制御系や点火系を備えており、エアフロメータ(AFM)13の出力に基づいて内燃機関1の吸入空気量を算出し、適切な燃料量を図示せぬ燃料噴射弁より噴射するとともに、適切な点火時期に図示せぬ点火栓によって点火を行うようになっている。
【0034】
図12は、図11のエンジンコントローラ9の概要を機能ブロック図として示したものであり、図13は、さらに詳細に示した機能ブロック図である。以下、これを各ブロック毎に説明する。
【0035】
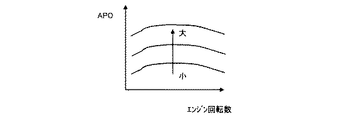
目標トルク演算部21は、内燃機関にどの位のトルクを発生させるか決定する(但し、トルクの代わりに、体積効率、体積流量比、空気量などのパラメータでも良い)。一例としては、アクセル開度APOとエンジン回転数Neを入力とし、両者に従って、目標エンジントルクマップ31(図17参照)より目標エンジントルクtTemを求める。この目標エンジントルクtTemは、応答補正処理部32によって補正され、目標トルクtTeとして出力される。すなわち、吸気弁2を直接制御して空気量を制御する内燃機関においては、通常の内燃機関に比べてトルク応答性(特にエンジン低速領域での応答性)が高すぎる場合が考えられるため、ここでトルク応答性を調整する。
【0036】
一例としては、エンジン回転数に依存した時定数tauTeを図18に示すようなテーブルで与え、これによって、次式のように1次遅れ処理を施す手法が考えられる。
【0037】
【数1】
tTe = tTem × tauTe + tTe(o) × ( 1 − tauTe )
ここで、tTe(o)は、目標トルクtTeの前回演算値である。
【0038】
得られた目標トルクtTeは、吸気弁操作量演算部22およびスロットル操作量演算部23へ与えられる。
【0039】
吸気弁操作量演算部22では、目標トルクtTeを実現するための吸気弁の操作量を決定する。
【0040】
ここで、吸気弁の操作量のパラメータとしては、便宜上、作動角と中心角とを用いるが、他の同等のパラメータでも良い。なお、実際のアクチュエータを制御するためには、作動角、中心角では設定できないため、変換が必要である。
【0041】
吸気弁操作量演算部22は、一例としては、目標トルク演算部21で求めた要求トルクtTeとエンジン回転数Neを入力とし、両者に従って、所定の作動角マップ33および中心角マップ34より、要求の作動角および中心角をそれぞれ求める。
【0042】
過渡補正判定部35では、算出した要求作動角および要求中心角と現在の作動角および中心角より、第1可変動弁機構5および第2可変動弁機構6が過渡状態であるか否か、つまり過渡補正が必要か否かを判定する。一例としては、各々の目標値と実値の偏差が所定値以上の場合を過渡状態とする。
【0043】
作動角応答補正処理部36では、過渡補正判定部35にて過渡補正が必要と判断された場合に、第1可変動弁機構5が通常の目標値追従よりも速く動くような目標値設定を行う。つまり、第1可変動弁機構5の作動角変更速度を通常時よりも大きくする。
【0044】
同様に、中心角応答補正処理部37では、過渡時の中心角変更速度の補正を行う。具体的には、過渡補正判定部35にて過渡補正が必要と判断された場合で、かつ作動角応答補正処理部36にて第1可変動弁機構5の作動角変更速度の補正処理を行っている場合には、第2可変動弁機構6が通常の目標値追従よりも遅く動くような目標値設定を行う。つまり、第2可変動弁機構6の中心角変更速度を通常時よりも小さくする。これに対し、過渡補正判定部35にて過渡補正が必要と判断された場合で、かつ作動角応答補正処理部36にて第1可変動弁機構5の作動角変更速度の補正処理を行っていない場合には、第2可変動弁機構6が通常の目標値追従よりも速く動くような目標値設定を行う。つまり、第2可変動弁機構6の中心角変更速度を通常時よりも大きくする。
【0045】
VEL目標値演算部38では、上記作動角応答補正処理部36を介して与えられた補正後の目標作動角を基に、第1可変動弁機構5のアクチュエータ制御用のパラメータに変換を行う。同様に、VTC目標値演算部39では、上記中心角応答補正処理部37を介して与えられた補正後の目標中心角を基に、第2可変動弁機構6のアクチュエータ制御用のパラメータに変換を行う。
【0046】
第1可変動弁機構5は、アクチュエータにより回転位置が制御されるコントロールシャフト角度と作動角との関係があらかじめ分かっているので(図19参照)、この関係を用いてVEL制御目標値(tVEL)を演算する。
【0047】
第2可変動弁機構6については、次式のように、初期中心角と目標中心角との差から制御目標値(tVTC)を演算する。
【0048】
【数2】
tVTC =初期中心角(ex.120deg)−目標中心角(tCENTER)
このようにして得られたVEL制御目標値(tVEL)とVTC制御目標値(tVTC)は、それぞれ第1,第2可変動弁機構5,6のアクチュエータに送られる。
【0049】
スロットル操作量演算部23では、目標トルク演算部21で決定した目標トルクを実現するための吸入負圧の設定、およびこの吸入負圧を実現するためのスロットル弁8の操作量を決定する。
【0050】
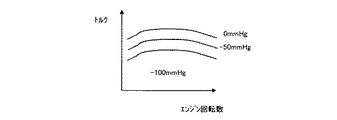
燃費向上のためには、吸入負圧は極力減らした設定とするのが良いが、キャニスタのパージやブローバイガスの処理などの都合上、ある程度の吸入負圧が必要であるので、例えば基本的な目標吸入負圧を、−50mmHg〜−100mmHg程度とする。しかしながら、最大トルクを要求されるような運転条件では、吸入負圧は不要なので、目標吸入負圧を0mmHgとする。
【0051】
一例としては、目標トルク演算部21で求めた要求エンジントルクとエンジン回転数を入力とし、両者に従って、図20に示すような特性の目標Boostマップ40より目標吸入負圧tBOOSTを求める。
【0052】
目標スロットル開度演算部41は、目標吸入負圧tBOOSTに基づいて電子制御スロットル弁8のアクチュエータに目標スロットル開度tTVOを出力する。一例として、得られた目標吸入負圧tBOOSTと吸入負圧センサ12で検出した実吸入負圧rBOOSTとの差を用いて、目標吸入負圧を実現するようにスロットル弁開度をフィードバック制御する。具体的には、次式に示すように、目標吸入負圧tBOOSTに対し実吸入負圧rBOOSTが所定値(dBOOST)以上下回る場合には、目標スロットル開度を所定値(dTVO)だけ開方向に制御し、目標吸入負圧tBOOSTに対し実吸入負圧rBOOSTが所定値(dBOOST)以上上回る場合には、目標スロットル開度を所定値(dTVO)だけ閉方向に制御する。なお、tTVO(o)は、前回値である。
【0053】
【数3】
tBOOST−rBOOST≧dBOOST → tTVO=tTVO(o)+dTVO
rBOOST−tBOOST≧dBOOST → tTVO=tTVO(o)−dTVO
その他の手法としては、スロットル弁開度に関しても、要求エンジントルクとエンジン回転数を入力としてマップ状に設定し、フィードフォワード方式で与えても良い。
【0054】
次に、上記の吸気弁操作量演算部22の主要部をソフトウェア的に処理する場合のフローチャートを図14に示す。
【0055】
まずステップ1で、前述したように所定のマップから要求作動角(tEVENT)および要求中心角(tCENTER)を求める。次に、ステップ2で、VTC制御領域(第2負荷領域に相当する)であるか否か判定する。このVTC制御領域は、主に中心角の変更により吸入空気量を調整する運転領域であり、比較的高負荷側に設定される。VTC制御領域でなければ、後述するステップ11へ進む。VTC制御領域であれば、ステップ3で、次式のように、実作動角rEVENTと目標作動角tEVENTの偏差が所定値(defEVENT)以上であるか否かを判定する。
【0056】
【数4】
|rEVENT − tEVENT |≧ defEVENT
ここで所定値(defEVENT)以上の場合は過渡状態と判断してステップ4へ進み、所定値未満の場合は、第1可変動弁機構5は定常状態であると判断して後述するステップ7へ進む。
【0057】
ステップ4では、過渡補正中であることを示す過渡補正フラグfKATOを「1」にセットする。
【0058】
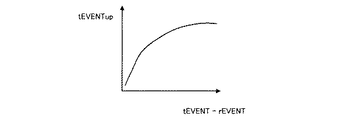
ステップ5では、第1可変動弁機構5を通常時よりも速く動かすために、目標作動角を補正する(tEVENT←tEVENThos)。補正法の一例としては、次式のように、目標作動角に所定の補正量(tEVENTup)を上乗せする方法が考えられる。ここで、上乗せする補正量(tEVENTup)は、補正前の目標作動角tEVENTと実作動角rEVENTとの差分を用いて、図21に示すような特性のテーブルを用いて決定する手法が一例として考えられる。
【0059】
【数5】
tEVENThos = tEVENT + tEVENTup
第1可変動弁機構5を速く動かしている間、第2可変動弁機構6は停止している必要があるので、ステップ6において、次式のように現在の中心角の実値(rCENTER)を補正後目標値(tCENTERhos)とする。
【0060】
【数6】
tCENTERhos = rCENTER
なお、第2可変動弁機構6を完全に停止せず、第2可変動弁機構6を通常時よりも遅く動かすようにしてもよい。
【0061】
一方、ステップ7では、中心角の制御状態を判定する。すなわち、次式のように実中心角rCENTERと目標中心角tCENTERの偏差が所定値(defCENTER)以上か否かを判定する。
【0062】
【数7】
rCENTER − tCENTER ≧ defCENTER
所定値以上の場合は過渡状態と判断しステップ8へ進み、所定値未満の場合は定常状態と判断しステップ11へ進む。
【0063】
ステップ8では、このように中心角のみ偏差が大きい状態が、単に中心角のみを操作する負荷領域(VTC制御領域)であるために作動角の偏差が無いのか、あるいは、作動角の過渡補正を実施した結果、作動角の偏差が無くなっているのかを判定する。具体的には、過渡補正フラグfKATOが「1」であるか否かを判定する。
【0064】
fKATO=0の場合には、中心角のみを操作する負荷領域であるために作動角の偏差が無い、と判断し、ステップ11へ進む。
【0065】
これに対し、fKATO=1の場合には、過渡補正を実施した結果、作動角の偏差が無くなったものと判断し、中心角の過渡補正を実施するために、ステップ9を経てステップ10へ進む。ステップ9では、次式のように、目標作動角の補正つまり上乗せ(tEVENTup)を終了する。
【0066】
【数8】
tEVENThos = tEVENT
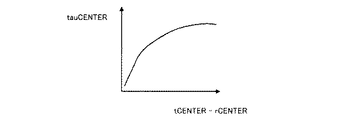
過渡補正により作動角が目標値に到達した後、中心角を速く動かす必要があるので、ステップ10で、その補正を行う。補正法の一例としては、次式のように、補正後目標値(tCENTERhos)を補正前の目標中心角tCENTERに向けて1次遅れで追従させる方法が考えられる。なお、このときの応答時定数(tauCENTER)は、補正前の目標中心角tCENTERと実中心角rCENTERとの差分に基づき、図22に示すような特性のテーブルによって決定する。
【0067】
【数9】
tCENTERhos=tCENTER×tauCENTER+tCENTERhos(o)×(1−tauCENTER )
ステップ2でVTC制御領域外の場合、あるいは、第1可変動弁機構5および第2可変動弁機構6の双方が定常である場合には、ステップ11で、過渡補正フラグ(fKATO)を「0」にクリアし、かつステップ12,13で、過渡補正のための目標作動角および目標中心角の補正を終了する。
【0068】
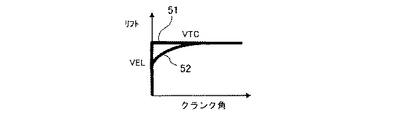
次に、上記の処理による作用を図15を用いて説明する。これは、前述の図7に対応しており、説明を容易にするために、低〜中負荷域では第1可変動弁機構5のみを操作し、中〜高負荷域では第2可変動弁機構6のみを操作するような設定を仮定する。このときの吸気弁の最大リフト点の推移(定常での特性)は、図16の線51のような形となる。
【0069】
このような設定において、運転者がアクセルペダルを急に踏み込み、(a)のように、要求負荷が低負荷域から高負荷域へ比較的速い速度で変化する過渡状態を考える。
【0070】
(b)のように、トルク要求(線b2)は、アクセル操作から求まる要求トルク値(線b1)に遅れ処理を施したものとし、この値に応じて、過渡初期は(c)の線c2のように作動角のみ目標値が変化し、過渡後期は(d)の線d2のように中心角のみ目標値が変化する。この結果、過渡中期において、第1可変動弁機構5および第2可変動弁機構6の双方が動こうとする領域が存在する(図のタイミングA)。
【0071】
このとき、上述した過渡補正フラグ(fKATO)が「1」にセットされ(ステップ4)、線c4のように、作動角目標値が上乗せ補正される(ステップ5)。さらに中心角目標値は、線d4のように、そのときの実中心角に保持される(ステップ6)ため、中心角は変化しない。
【0072】
これにより、実作動角は線c5のように速やかに変化していき、やがて当初の目標値に到達する。この時点で第1可変動弁機構5が定常状態と判断され(ステップ3)、作動角目標値の上乗せ補正が終了する(ステップ9)。そして、中心角の補正後目標値(tCENTERhos)は、線d5のように、中心角目標値(tCENTER)に向かって速やかに増加する(ステップ10)。従って、実中心角は、線d6のように変化する。
【0073】
中心角が目標値に到達すると、定常状態と判断され(ステップ7)、過渡補正フラグ(fKATO)がクリアされる(ステップ11)。
【0074】
このような処理の結果、最大リフト点の推移は、図16の線52で示す補正前の特性と異なり、線51で示す定常目標値とほぼ一致した形で推移する。従って、期待していた通りの残留ガスが吸気に取り込まれ、ポンピングロスの低減が達成されるため、目標とする燃費性能が過渡時においても得られる。
【0075】
上記実施例では、制御目標値を補正することで、作動角や中心角の変更速度を補正しているが、第1可変動弁機構5や第2可変動弁機構6の制御ゲインを補正することで、作動角変更速度や中心角変更速度を変えることもできる。図23は、このように過渡補正のために制御ゲインを補正するようにした実施例を示している。図示するように、過渡補正判定部35の出力に基づいて制御ゲインを補正する作動角応答ゲイン補正処理部61および中心角応答ゲイン補正処理部62を備えており、第1可変動弁機構5および第2可変動弁機構6に対し、それぞれの制御目標値とともに、応答ゲインが出力される。
【0076】
また、上記実施例では、過渡として負荷の上昇時を対象とした補正を行う例を説明したが、本発明は、負荷の減少時に、同様に過渡補正を行うように構成することもできる。図24は、このような制御の場合のフローチャートを示す。なお、この場合、制御ブロック図としては、図13と同様となる。
【0077】
図24のフローチャートは、基本的には図14のフローチャートと類似しており、以下、主に前述した図14のフローチャートと異なる点について説明する。
【0078】
まずステップ1で、前述したように所定のマップから要求作動角(tEVENT)および要求中心角(tCENTER)を求める。次に、ステップ2で、VEL制御領域(第1負荷領域に相当する)であるか否か判定する。このVEL制御領域は、主に作動角の変更により吸入空気量を調整する運転領域であり、比較的低負荷側に設定される。VEL制御領域でなければ、ステップ11へ進む。
【0079】
VEL制御領域であれば、ステップ3で、実中心角rCENTERと目標中心角tCENTERの偏差が所定値(defCENTER)以上か否かを判定する。
【0080】
ここで所定値(defCENTER)以上の場合は過渡状態(負荷の減少)と判断してステップ4へ進み、過渡補正フラグfKATOを「1」にセットする。所定値未満の場合は、第2可変動弁機構6は定常状態であると判断してステップ7へ進む。
【0081】
ステップ5では、第2可変動弁機構6を速く動かすために、目標中心角を補正する(tCENTER←tCENTERhos)。第2可変動弁機構6を速く動かしている間、第1可変動弁機構5は停止している必要があるので、ステップ6において、現在の作動角の実値(rEVENT)を補正後目標値(tEVENThos)とする。なお、第1可変動弁機構5を完全に停止せず、通常時よりも遅く動かすようにしてもよい。
【0082】
一方、ステップ7では、作動角の制御状態を判定する。すなわち、実作動角rEVENTと目標作動角tEVENTの偏差が所定値(defEVENT)以上であるか否かを判定する。所定値以上の場合は過渡状態と判断しステップ8へ進み、所定値未満の場合は定常状態と判断しステップ11へ進む。
【0083】
ステップ8では、このように作動角のみ偏差が大きい状態が、単に作動角のみを操作する負荷領域(VEL制御領域)であるために中心角の偏差が無いのか、あるいは、中心角の過渡補正を実施した結果、中心角の偏差が無くなっているのかを判定する。具体的には、過渡補正フラグfKATOが「1」であるか否かを判定する。
【0084】
fKATO=0の場合には、作動角のみを操作する負荷領域であるために中心角の偏差が無い、と判断し、ステップ11へ進む。
【0085】
これに対し、fKATO=1の場合には、過渡補正を実施した結果、中心角の偏差が無くなったものと判断し、作動角の過渡補正を実施するために、ステップ9で中心角の過渡補正を終了し、かつステップ10へ進む。
【0086】
ステップ10では、第1可変動弁機構5により作動角を速く動かすために、目標作動角を補正する。
【0087】
最後に、ステップ11で、過渡補正フラグ(fKATO)を「0」にクリアし、かつステップ12,13で、過渡補正のための目標作動角および目標中心角の補正を終了する。
【0088】
図25は、上記のような制御による負荷減少の際の作動角や中心角の変化を示している。この負荷減少時には、単純化した例では、ある負荷(VTC制御領域とVEL制御領域との境界)までは中心角のみが操作され、それ以降は作動角のみが操作される。本発明の過渡補正により、VEL制御領域に入ったときに▲1▼のように中心角の目標値が低くなり、中心角変更速度が大きくなる。中心角が定常の目標値に達するまでは、第1可変動弁機構5は停止している。中心角が定常の目標値に達したら、▲2▼のように、第1可変動弁機構5が通常時よりも速い速度でもって動くことになる。
【0089】
なお、前述した図23の実施例と同様に、作動角や中心角の変更速度の補正を、制御ゲインの補正により実現することも可能である。
【図面の簡単な説明】
【図1】作動角および中心角の制御の設定例を示す特性図。
【図2】負荷上昇時の代表的な点を併せて示した図1と同様の特性図。
【図3】図2の各点での作動角を示すグラフ。
【図4】作動角および中心角の単純化した制御マップの一例を示す特性図。
【図5】第1可変動弁機構および第2可変動弁機構によるバルブリフト特性の変化を示す特性図。
【図6】負荷に対する最大リフト点の推移を示す特性図。
【図7】従来における負荷上昇時の作動角、中心角等の変化を示すタイムチャート。
【図8】負荷上昇時の最大リフト点の推移を示す特性図。
【図9】等トルク線と最大リフト点の軌跡との関係を示す特性図。
【図10】本発明による最大リフト点の推移を示す特性図。
【図11】本発明に係る内燃機関の吸気弁駆動制御装置のシステム構成図。
【図12】エンジンコントローラの機能ブロック図。
【図13】さらに詳細を示す機能ブロック図。
【図14】図13の主要部に相当するフローチャート。
【図15】本発明による負荷上昇時の作動角、中心角等の変化を示すタイムチャート。
【図16】最大リフト点の推移を示す特性図。
【図17】目標エンジントルクマップを示す特性図。
【図18】時定数tauTeのテーブルの特性図。
【図19】作動角とコントロールシャフト角度との関係を示す特性図。
【図20】目標吸入負圧の特性図。
【図21】作動角上乗せ量tEVENTupの特性図。
【図22】中心角応答時定数tauCENTERの特性図。
【図23】制御ゲインを補正する実施例を示す機能ブロック図。
【図24】負荷減少時の過渡補正の処理を示すフローチャート。
【図25】負荷減少時のタイムチャート。
【符号の説明】
1…内燃機関
2…吸気弁
5…第1可変動弁機構
6…第2可変動弁機構
8…電子制御スロットル弁
9…エンジンコントローラ
Claims (8)
- 吸気弁の作動角を連続的に変更可能な第1可変動弁機構と、上記作動角の中心角を連続的に変更可能な第2可変動弁機構と、を備え、低負荷側の第1負荷領域では主に上記作動角を変更して吸入空気量を調整するとともに高負荷側の第2負荷領域では主に上記中心角を変更して吸入空気量を調整するようにした内燃機関の吸気弁駆動制御装置において、
負荷に応じて目標作動角を設定する目標作動角設定手段と、
負荷が上記第2負荷領域にありかつ上記作動角が上記目標作動角に到達していないとき、上記第1可変動弁機構の作動角変更速度を通常時よりも大きくする作動角変更速度補正手段と、
を備えることを特徴とする内燃機関の吸気弁駆動制御装置。 - 吸気弁の作動角を連続的に変更可能な第1可変動弁機構と、上記作動角の中心角を連続的に変更可能な第2可変動弁機構と、を備え、低負荷側の第1負荷領域では主に上記作動角を変更して吸入空気量を調整するとともに高負荷側の第2負荷領域では主に上記中心角を変更して吸入空気量を調整するようにした内燃機関の吸気弁駆動制御装置において、
負荷に応じて目標作動角を設定する目標作動角設定手段と、
負荷が上記第2負荷領域にありかつ上記作動角が上記目標作動角に到達していないとき、上記第2可変動弁機構の中心角変更速度を通常時よりも小さくする中心角変更速度補正手段と、
を備えることを特徴とする内燃機関の吸気弁駆動制御装置。 - 吸気弁の作動角を連続的に変更可能な第1可変動弁機構と、上記作動角の中心角を連続的に変更可能な第2可変動弁機構と、を備え、低負荷側の第1負荷領域では主に上記作動角を変更して吸入空気量を調整するとともに高負荷側の第2負荷領域では主に上記中心角を変更して吸入空気量を調整するようにした内燃機関の吸気弁駆動制御装置において、
負荷に応じて目標作動角を設定する目標作動角設定手段と、
負荷が上記第2負荷領域にありかつ上記作動角が上記目標作動角に到達していないとき、上記第1可変動弁機構の作動角変更速度を通常時よりも大きくする作動角変更速度補正手段と、
この作動角変更速度の補正中は上記第2可変動弁機構の中心角変更速度を通常時よりも小さくする中心角変更速度補正手段と、
を備えることを特徴とする内燃機関の吸気弁駆動制御装置。 - 吸気弁の作動角を連続的に変更可能な第1可変動弁機構と、上記作動角の中心角を連続的に変更可能な第2可変動弁機構と、を備え、低負荷側の第1負荷領域では主に上記作動角を変更して吸入空気量を調整するとともに高負荷側の第2負荷領域では主に上記中心角を変更して吸入空気量を調整するようにした内燃機関の吸気弁駆動制御装置において、
負荷に応じて目標中心角を設定する目標中心角設定手段と、
負荷が上記第1負荷領域にありかつ上記中心角が上記目標中心角に到達していないとき、上記第2可変動弁機構の中心角変更速度を通常時よりも大きくする中心角変更速度補正手段と、
を備えることを特徴とする内燃機関の吸気弁駆動制御装置。 - 吸気弁の作動角を連続的に変更可能な第1可変動弁機構と、上記作動角の中心角を連続的に変更可能な第2可変動弁機構と、を備え、低負荷側の第1負荷領域では主に上記作動角を変更して吸入空気量を調整するとともに高負荷側の第2負荷領域では主に上記中心角を変更して吸入空気量を調整するようにした内燃機関の吸気弁駆動制御装置において、
負荷に応じて目標中心角を設定する目標中心角設定手段と、
負荷が上記第1負荷領域にありかつ上記中心角が上記目標中心角に到達していないとき、上記第1可変動弁機構の作動角変更速度を通常時よりも小さくする作動角変更速度補正手段と、
を備えることを特徴とする内燃機関の吸気弁駆動制御装置。 - 吸気弁の作動角を連続的に変更可能な第1可変動弁機構と、上記作動角の中心角を連続的に変更可能な第2可変動弁機構と、を備え、低負荷側の第1負荷領域では主に上記作動角を変更して吸入空気量を調整するとともに高負荷側の第2負荷領域では主に上記中心角を変更して吸入空気量を調整するようにした内燃機関の吸気弁駆動制御装置において、
負荷に応じて目標中心角を設定する目標中心角設定手段と、
負荷が上記第1負荷領域にありかつ上記中心角が上記目標中心角に到達していないとき、上記第2可変動弁機構の中心角変更速度を通常時よりも大きくする中心角変更速度補正手段と、
この中心角変更速度の補正中は上記第1可変動弁機構の作動角変更速度を通常時よりも小さくする作動角変更速度補正手段と、
を備えることを特徴とする内燃機関の吸気弁駆動制御装置。 - 上記作動角変更速度もしくは上記中心角変更速度の補正を、目標作動角もしくは目標中心角の補正により行うことを特徴とする請求項1〜6のいずれかに記載の内燃機関の吸気弁駆動制御装置。
- 上記作動角変更速度もしくは上記中心角変更速度の補正を、アクチュエータの制御ゲインの補正により行うことを特徴とする請求項1〜6のいずれかに記載の内燃機関の吸気弁駆動制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003018218A JP4165235B2 (ja) | 2003-01-28 | 2003-01-28 | 内燃機関の吸気弁駆動制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003018218A JP4165235B2 (ja) | 2003-01-28 | 2003-01-28 | 内燃機関の吸気弁駆動制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004232467A true JP2004232467A (ja) | 2004-08-19 |
| JP4165235B2 JP4165235B2 (ja) | 2008-10-15 |
Family
ID=32948408
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003018218A Expired - Fee Related JP4165235B2 (ja) | 2003-01-28 | 2003-01-28 | 内燃機関の吸気弁駆動制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4165235B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1686253A3 (en) * | 2005-02-01 | 2007-04-04 | Toyota Jidosha Kabushiki Kaisha | Intake air amount control apparatus and intake air amount control method for internal combustion engine |
-
2003
- 2003-01-28 JP JP2003018218A patent/JP4165235B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1686253A3 (en) * | 2005-02-01 | 2007-04-04 | Toyota Jidosha Kabushiki Kaisha | Intake air amount control apparatus and intake air amount control method for internal combustion engine |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4165235B2 (ja) | 2008-10-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017042868A1 (ja) | 排気再循環制御方法及び排気再循環制御装置 | |
| JP4449429B2 (ja) | 内燃機関の吸気弁駆動制御装置 | |
| WO2017002254A1 (ja) | 内燃機関の制御方法及び制御装置 | |
| JP5920176B2 (ja) | 内燃機関の制御装置 | |
| JP5169876B2 (ja) | 内燃機関の制御装置及び制御方法 | |
| JP4019866B2 (ja) | 内燃機関の制御装置 | |
| JP4165235B2 (ja) | 内燃機関の吸気弁駆動制御装置 | |
| US11225919B2 (en) | Supercharging pressure setting apparatus | |
| JP4379098B2 (ja) | 内燃機関の制御装置 | |
| JP4300359B2 (ja) | 内燃機関の制御装置 | |
| JP4127075B2 (ja) | 内燃機関の吸気弁駆動制御装置 | |
| JP2011231639A (ja) | 車両の出力制御装置 | |
| JP4412047B2 (ja) | 内燃機関の吸気制御装置 | |
| JP4466342B2 (ja) | 内燃機関の吸気制御装置 | |
| JP2004124743A (ja) | 内燃機関用制御装置 | |
| JP4273950B2 (ja) | 内燃機関の吸気制御装置 | |
| JP2007132224A (ja) | 内燃機関の制御装置 | |
| JP4556816B2 (ja) | 内燃機関の制御装置 | |
| JP4379300B2 (ja) | 内燃機関の制御装置 | |
| JP4534705B2 (ja) | 内燃機関の吸気制御装置 | |
| JP4760793B2 (ja) | 内燃機関の制御装置 | |
| JP4254261B2 (ja) | 内燃機関の吸気弁駆動制御装置 | |
| JP2011038477A (ja) | エンジンの制御装置 | |
| JP2005090331A (ja) | 内燃機関の吸気制御装置 | |
| JP4110981B2 (ja) | 内燃機関の吸気弁駆動制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051226 |
|
| A977 | Report on retrieval |
Effective date: 20071030 Free format text: JAPANESE INTERMEDIATE CODE: A971007 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071120 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Effective date: 20080708 Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080721 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 3 Free format text: PAYMENT UNTIL: 20110808 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120808 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |