JP2004232602A - エンジンの触媒劣化診断装置 - Google Patents
エンジンの触媒劣化診断装置 Download PDFInfo
- Publication number
- JP2004232602A JP2004232602A JP2003024675A JP2003024675A JP2004232602A JP 2004232602 A JP2004232602 A JP 2004232602A JP 2003024675 A JP2003024675 A JP 2003024675A JP 2003024675 A JP2003024675 A JP 2003024675A JP 2004232602 A JP2004232602 A JP 2004232602A
- Authority
- JP
- Japan
- Prior art keywords
- value
- correction
- integrated value
- catalyst
- integrated
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 239000003054 catalyst Substances 0.000 title claims abstract description 124
- 238000003745 diagnosis Methods 0.000 title claims abstract description 99
- 230000006866 deterioration Effects 0.000 title claims abstract description 54
- 238000012937 correction Methods 0.000 claims abstract description 115
- 238000001514 detection method Methods 0.000 claims abstract description 67
- 238000004364 calculation method Methods 0.000 claims abstract description 23
- 239000000446 fuel Substances 0.000 claims description 53
- 238000011144 upstream manufacturing Methods 0.000 claims description 13
- 241001481504 Radi vesiculovirus Species 0.000 abstract description 58
- 238000010586 diagram Methods 0.000 abstract description 8
- 238000000034 method Methods 0.000 description 46
- 238000012545 processing Methods 0.000 description 20
- 230000005856 abnormality Effects 0.000 description 11
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 11
- 230000010354 integration Effects 0.000 description 11
- 239000001301 oxygen Substances 0.000 description 10
- 229910052760 oxygen Inorganic materials 0.000 description 10
- 230000002159 abnormal effect Effects 0.000 description 6
- 239000007789 gas Substances 0.000 description 5
- 230000007423 decrease Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 238000002347 injection Methods 0.000 description 4
- 239000007924 injection Substances 0.000 description 4
- 238000002485 combustion reaction Methods 0.000 description 3
- 238000002474 experimental method Methods 0.000 description 3
- 238000004088 simulation Methods 0.000 description 3
- 230000004397 blinking Effects 0.000 description 2
- 230000001052 transient effect Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 238000013024 troubleshooting Methods 0.000 description 1
Images








Landscapes
- Exhaust Gas After Treatment (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
【課題】より広範囲な診断条件で触媒の劣化を診断する。
【解決手段】演算部16は、FA/Fセンサ24aの検出値の変化量FDVを所定時間毎に算出し、この変化量FDVを積算することによりFO2積算値FADVを算出するとともに、RA/Fセンサ25aの検出値の変化量RDVを所定時間毎に算出し、この変化量RDVを積算することによりRO2積算値RADVを算出する。補正部17は、吸入空気量Qに応じて第1の補正値K1を設定し、この補正値K1を用いてFO2積算値FADVを補正するとともに、第2の補正値K2を設定し、この第2の補正値K2を用いてRO2積算値RADVを補正する。診断部18は、補正された第1の積算値FADVと補正された第2の積算値RADVとに基づいて算出した診断値VDIAを、所定の診断しきい値VDIAthと比較することにより、触媒13aが劣化しているか否かを診断する。
【選択図】 図1
【解決手段】演算部16は、FA/Fセンサ24aの検出値の変化量FDVを所定時間毎に算出し、この変化量FDVを積算することによりFO2積算値FADVを算出するとともに、RA/Fセンサ25aの検出値の変化量RDVを所定時間毎に算出し、この変化量RDVを積算することによりRO2積算値RADVを算出する。補正部17は、吸入空気量Qに応じて第1の補正値K1を設定し、この補正値K1を用いてFO2積算値FADVを補正するとともに、第2の補正値K2を設定し、この第2の補正値K2を用いてRO2積算値RADVを補正する。診断部18は、補正された第1の積算値FADVと補正された第2の積算値RADVとに基づいて算出した診断値VDIAを、所定の診断しきい値VDIAthと比較することにより、触媒13aが劣化しているか否かを診断する。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、エンジンの排気系に設けられた触媒の上流と下流とに空燃比センサを設け、両空燃比センサの検出値に基づいて触媒の劣化を診断するエンジンの触媒劣化診断装置に関する。
【0002】
【従来の技術】
従来から、触媒の上流と下流とに空燃比センサを設け、両空燃比センサの出力により空燃比を制御する技術が提案されている。この空燃比制御では、これらの空燃比センサの検出値に基づき、空燃比が所定の値(ストイキ(理論空燃比))に近づくように、エンジンの燃料噴射量が制御される。ところで、空燃比制御を正確に行ったとしても、触媒そのものの性能が劣化するに従い、有害成分の除去率が低下してしまう。そのため、これらの空燃比センサの出力に基づいて触媒の劣化を診断する技術が、例えば、特許文献1に開示されている。
【0003】
本出願人によって既に提案された特許文献1では、まず、触媒の上流に設けられた空燃比センサの出力電圧の変化量(絶対値)が所定時間毎に算出され、この変化量が積算される。また、触媒の下流に設けられた空燃比センサの出力電圧の変化量(絶対値)が所定時間毎に算出され、この変化量が積算される。そして、これらの積算値の比が所定のしきい値と比較され、触媒が劣化しているか否かが診断される。
【0004】
【特許文献1】
特開平10−331627号公報
【0005】
【発明が解決しようとする課題】
しかしながら、従来の劣化診断では、診断結果の信頼性を向上させるため、エンジンに吸入される吸入空気量が特定の範囲内に存在していることを条件として診断を行っている。これは、低吸入空気量側または高吸入空気量側では、吸入空気量が変動した場合に、センサの応答遅れなどに起因して、空燃比センサが過剰な値を示したり、反応が鈍くなったりするといった事態が生じ得るからである。このような場合には、空燃比センサの検出値が真の値からずれてしまい、診断の誤判定に繋がる虞がある。そこで、このような事態を回避すべく、吸入空気量に条件を設け、空燃比センサの検出値に含まれる誤差が少なくなるような状況においてのみ触媒の劣化診断を行っている。また、同様の理由から、外乱が診断に与える影響を低減すべく、例えば、車速が特定の速度範囲に存在するといったことを条件として劣化診断を行っている。
【0006】
特に、近年では、より厳しい排ガス規制が要求されており、この要求を満足するためには触媒の劣化をいち早く診断する必要がある。そのため、吸入空気量や車速といった診断条件を従来よりも広範におよぶ領域にまで拡大して診断を行う必要が生じている。
【0007】
本発明は、かかる事情に鑑みてなされたものであり、その目的は、より広範囲な診断条件で触媒の劣化を診断することである。
【0008】
また、本発明の別の目的は、広範囲な診断条件で触媒の劣化を診断する際に、触媒の劣化の程度を示す診断値の信頼性を向上させることである。
【0009】
【課題を解決するための手段】
かかる課題を解決するために、第1の発明は、エンジンの排気系に設けられた触媒の上流にフロント空燃比センサを設けるとともに、触媒の下流にリア空燃比センサを設け、フロント空燃比センサの検出値とリア空燃比センサの検出値とに基づいて触媒の劣化を診断するエンジンの触媒劣化診断装置を提供する。かかる装置は、演算部と、補正部と、診断部とを有する。演算部は、フロント空燃比センサの検出値の変化量を所定時間毎に算出し、算出された変化量を積算することにより第1の積算値を算出するとともに、リア空燃比センサの検出値の変化量を所定時間毎に算出し、算出された変化量を積算することにより第2の積算値を算出する。補正部は、吸入空気量に応じて第1の補正値を設定し、設定された第1の補正値を用いて第1の積算値を補正するとともに、吸入空気量に応じて第2の補正値を設定し、設定された第2の補正値を用いて第2の積算値を補正する。診断部は、補正された第1の積算値と補正された第2の積算値とに基づいて算出した診断値を、所定の診断しきい値と比較することにより、触媒が劣化しているか否かを診断する。
【0010】
ここで、第1の発明において、診断部は、補正された第1の積算値をリア空燃比センサの検出値がリッチからリーンへ、またはリーンからリッチへ反転する毎に積算した第3の積算値と、補正された第2の積算値をリア空燃比センサの検出値がリッチからリーンへ、またはリーンからリッチへ反転する毎に積算した第4の積算値に基づいて算出した診断値を、所定の診断しきい値と比較することにより、触媒が劣化しているか否かを診断することが好ましい。または、診断部は、補正された第1の積算値を所定時間よりも長い所定の周期毎に積算した第3の積算値と、補正された第2の積算値を所定の周期毎に積算した第4の積算値とに基づいて算出した診断値を、所定の診断しきい値と比較することにより、触媒が劣化しているか否かを診断してもよい。
【0011】
また、第1の発明において、補正部は、所定時間毎の吸入空気量の平均値と第1の補正値とを対応付けたマップまたは計算式に基づき、第1の補正値を設定し、所定時間毎の吸入空気量の平均値と第2の補正値とを対応付けたマップまたは計算式に基づき、第2の補正値を設定することが好ましい。または、補正部は、吸入空気量を所定時間毎に積算した空気量積算値と第1の補正値とを対応付けたマップまたは計算式に基づき、第1の補正値を設定し、空気量積算値と第2の補正値とを対応付けたマップまたは計算式に基づき、第2の補正値を設定してもよい。
【0012】
【発明の実施の形態】
(第1の実施形態)
図1は、本実施形態の一例である四気筒の水平対向式エンジンの全体構成図である。同図には明記されていないが、エンジン1の気筒#1〜#4のうち、気筒#1,#3は左バンクに配置され、気筒#2,#4は右バンクに配置されている。このエンジン1の各吸気ポートには吸気バルブ2が設けられている。これらの吸気ポートのうち、左バンク側(気筒#1,#3)の吸気ポートはインテークマニホールド3aに連通し、右バンク側(気筒#2,#4)の吸気ポートは左バンク側のそれとは独立したインテークマニホールド3bに連通している。一方、エンジン1の各排気ポートには排気バルブ4が設けられている。これらの排気ポートのうち、左バンク側の排気ポートはエキゾーストマニホールド5aに連通し、右バンク側の排気ポートは左バンク側のそれとは独立したエキゾーストマニホールド5bに連通している。また、シリンダヘッドにおいて各気筒#1〜#4の燃焼室の中央には、混合気を着火する点火プラグ6が設けられている。そして、各燃焼室における吸気バルブ2の近傍には、燃焼室内に燃料(ガソリン)を噴射するインジェクタ7が設けられている。
【0013】
吸気通路に設けられたエアクリーナ8は、インテークマニホールド3a,3bに連通したエアチャンバ9に接続されている。エアクリーナ8とエアチャンバ9との間には、吸入空気量を調整する電動スロットルバルブ10が介装されている。このスロットルバルブ10は、電動モータ11によって動作し、アクセルペダル(図示せず)と機械的にリンクした構造とはなっていない。スロットルバルブ10の開度(スロットル開度)は、マイクロコンピュータを中心として構成される制御装置12(以下、「ECU」という)からの出力信号によって設定される。
【0014】
左バンク側の排気系であるエキゾーストマニホールド5aは、排気通路を介してメイン触媒13aに連通している。一方、右バンク側の排気系であるエキゾーストマニホールド5bは、排気通路を介して左バンク側のそれとは別個のメイン触媒13bに連通している。これらのメイン触媒13a,13bの下流側の排気通路は合流しており、その合流位置よりも下流にはサブ触媒14が設けられている。そして、それぞれ独立した排気系から排出される排気ガスは、一方のメイン触媒13a(または13b)とサブ触媒14とにおいて浄化され、マフラーを経て排出される。
【0015】
ECU12は、ROMに記憶された制御プログラムに従い、燃料噴射量、点火時期、スロットル開度等に関する演算を行う。そして、ECU12は、この演算によって算出された制御量(制御信号)を各種アクチュエータに対して出力する。ECU12には、エンジン1等の運転状態を検出するために、センサ20〜25bを含む各種センサからのセンサ信号が入力されている。吸入空気量センサ20は、エアクリーナ8の直下流に設けられており、吸入空気量Qを検出するホットワイヤ式またはホットフィルム式のセンサである。スロットル開度センサ21はスロットル開度θtを検出し、車速センサ22は車速vを検出する。エンジン回転数センサ23は、エンジン回転数Neを検出するセンサであり、エンジン1のクランクシャフトと一体的に回転するクランクロータの外周近傍に配置されたクランク角センサを用いることできる。空燃比センサ24a,24b,25a,25bは、排ガス中の酸素濃度を検出するセンサであり、個々のメイン触媒13a,13bにおける直上流と直下流とにそれぞれ設けられている。具体的には、左バンク側のメイン触媒13aの直上流にはフロント空燃比センサ24a(以下、「FA/Fセンサ」という)が設けられており、この触媒13aの直下流で、かつ、排気通路の合流位置よりも上流にはリア空燃比センサ25a(以下、「RA/Fセンサ」という)が設けられている。一方、右バンク側のメイン触媒13bの直上流にはFA/Fセンサ24bが設けられており、メイン触媒13bの直下流で、かつ排気通路の合流位置よりも上流にはRA/Fセンサ25bが設けられている。なお、これらのA/Fセンサ24a〜25bとしては、空燃比センサを用いることに限定されず、周知の酸素センサを用いることもできる。ただし、空燃比制御の観点から、広範囲の酸素濃度を検出する空燃比センサ(例えば、リニアO2センサ)を用いることが好ましい。
【0016】
図2は、ECU12の機能的なブロック構成図である。上記構造を有するエンジン1において、触媒(本実施形態では、左バンク側のメイン触媒13a)の劣化を診断する場合、ECU12は、これを機能的に捉えると、判断部15と、演算部16と、補正部17と、診断部18とで構成される。判断部15は、エンジン1の運転状態に基づいて診断条件が成立するか否かを判断する。この判断部15によって診断条件が成立したと判断されると、演算部16は、診断対象となるメイン触媒13aの直上流に設けられたFA/Fセンサ24aの検出値の変化量FDV(絶対値)を所定時間毎に算出し、この変化量FDVを積算することによりFO2積算値FADVを算出する。それとともに、演算部16は、このメイン触媒13aの直下流に設けられたRA/Fセンサ25aの検出値の変化量RDV(絶対値)を所定時間毎に算出し、この変化量RDVを積算することによりRO2積算値RADVを算出する。また、演算部16は、吸入空気量センサ20の検出値である吸入空気量Qを所定時間毎に積算し、空気量積算値AQを算出する。これらの積算値FADV,RADV,AQは、補正部17に対して出力される。この補正部17は、吸入空気量Q(正確には、吸入空気量Qの平均値Qave(空気量積算値AQ/積算に要する時間))に応じて、FO2積算値FADV用の補正値K1を特定するとともに、RO2積算値RADV用の補正値K2を特定する。これらの補正値K1,K2は、後述するように、ECU12のROMに格納された各積算値FADV,RADV用のマップを参照することにより、一意に特定される。補正部17は、補正値K1を用いてFO2積算値FADVを補正し、補正値K2を用いてRO2積算値RADVを補正する。そして、補正されたFO2積算値FADV(以下、「FO2補正値FADV’」という)と、補正されたRO2積算値RADV(以下、「RO2補正値RADV’」という)とが診断部18に対して出力される。診断部18は、これらの補正値FADV’,RADV’に基づいて、診断値VDIA(本実施形態では、VDIA=RADV’/FADV’)、すなわち、フロント触媒13aの劣化の程度を示す値として用い、メイン触媒13aが劣化しているか否かを診断する。
【0017】
なお、上記エンジン1では、各メイン触媒13a,13bを別個の制御対象として空燃比制御を行う関係上、個々のメイン触媒13a,13bについてFA/Fセンサ(24a,24b)とRA/Fセンサ(25a,25b)とが設けられている。ただし、一方のメイン触媒13a(またはメイン触媒13b)を対象として劣化診断を行えば、他方のそれも同等に劣化しているであろうと推定できるため、本実施形態では、例示的に、左バンク側のメイン触媒13aのみを診断対象として処理が行われる。また、劣化の進行度合いが最も大きい排気系の上流に位置するメイン触媒13aのみを診断対象とし、各バンクの排気通路が合流した後に設けられているサブ触媒14を診断対象から除外している。
【0018】
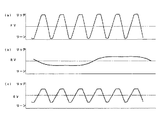
つぎに、第1の実施形態における触媒劣化診断の概略について説明する。図3は、A/Fセンサの出力電圧の一例を示す波形図である。同図に示すように、メイン触媒13aの上流に設けられるFA/Fセンサ24aの出力電圧FV(すなわち、検出値)、または、この触媒13aの下流に設けられるRA/Fセンサ25aの検出値RVには、リーン(検出値FV(或いは、RV)がスライスレベルよりも小さい状態)からリッチ(検出値FV(或いは、RV)がスライスレベルよりも大きい状態)への上昇変化と、リッチからリーンへの下降変化とがある。これらのセンサ24a,25aのうち、FA/Fセンサ24aの検出値FVは、エンジン1の排気ガス中の酸素濃度に応じて変動する(同図(a))。一方、RA/Fセンサ25aの検出値RVは、メイン触媒13aの酸素(O2)ストレージ効果により排気ガス中の酸素濃度が低下するため、基本的に、FA/Fセンサ24aのリッチからリーンへの反転周期よりも、その反転周期が長くなる(同図(b))。ところが、メイン触媒13aの劣化が経時的に進行すると、O2ストレージ効果も低下するため、RA/Fセンサ25aの検出値RVは、位相遅れがあるもののFA/Fセンサ24aの出力波形に近似していく。すなわち、メイン触媒13aが劣化した場合、RA/Fセンサ25aのリッチからリーンへの反転周期はメイン触媒13aが新品の状態に比べて短くなるとともに、スライスレベルを基準としたリッチ、リーンの変化幅は大きくなる(同図(c))。
【0019】
FA/Fセンサ24aに関して、所定時間毎(例えば、50msec毎)に、前回(すなわち、50msec前)の検出値FVn−1と、現在の検出値FVnとの変化量FDV(絶対値)が算出され、算出された値がFO2積算値FADVとして積算される。また、RA/Fセンサ25aに関して、前回の検出値RVn−1と、現在の検出値RVnとの変化量RDV(絶対値)が算出され、この算出された値がRO2積算値RADVとして積算される。そして、FO2積算値FADVに対するRO2積算値RADVの比(RO2積算値RADV/FO2積算値RADV)が算出される。このとき、メイン触媒13aの劣化にともない(例えば、RA/Fセンサ25aの検出値RVが図3(b)の状態から図3(c)の状態になるに従い)、この積算値の比が大きくなっていく。そのため、この積算値の比をメイン触媒13aの劣化の程度を示す値(すなわち、診断値VDIA)として考えることで、メイン触媒13aの劣化を捉えることができる。
【0020】
ところで、触媒劣化の進行時間よりも短い時間単位で捉えた場合、各A/Fセンサ24a,25aの検出値は、正常な運転状態を維持している限り(例えば、車速vが一定)、基本的に、スライスレベルを基準に一定の変化幅でリッチ・リーンの反転を繰り返す(以下、このような状況を「理想出力波形」という)。しかしながら、以下に示すような状況では、A/Fセンサの応答遅れなどに起因して、各A/Fセンサ24a,25aの検出値が、必ずしも理想出力波形を満たすような値として出力されないことがある。例えば、吸入空気量Qが低吸入空気量側へシフトしている状況では、吸入空気量Qが変動した場合、各A/Fセンサ24a,25aの検出値FV,RVに、例えば、オーバーシュートと呼ばれる理想出力波形よりも変化幅が大きくなる現象が発生することがある。一方、吸入空気量Qが高吸入空気量側へシフトしている状況では、吸入空気量Qが変動した場合、各A/Fセンサ24a,25aの検出値FV,RVに、例えば、理想出力波形よりも変化幅が小さくなる現象が発生することがある。また、外乱の影響が作用すると、低・高吸入空気量側に吸入空気量Qがシフトしていない場合であっても、吸入空気量Qの変化とともに、検出値FV,RFに理想出力波形からのずれが生じることがある。特に、RA/Fセンサ25aについては、この現象が現れ易い。
【0021】
図4は、RA/Fセンサ25aの検出値を示す出力波形図である。同図には、出力波形の一例として、オーバーシュートが発生した様子が描かれている。上述したように診断値VDIAはFO2積算値FADVとRO2積算値RADVとの比として算出される関係上、変化量RDVにオーバーシュートに起因した変化量が含まれると、この影響が診断値VDIAに反映されてしまう。したがって、図4に示すような状況では、実際はメイン触媒13aが劣化していないにも拘わらず、あたかもメイン触媒13aが劣化したとみなし得るような値として診断値VDIAが算出されてしまう。そのため、このようなオーバーシュートといった理想出力波形からのずれが検出値FV,RVに生じた場合には、メイン触媒13aの劣化を正確に捉えられなくなる可能性がある。
【0022】
そこで、本実施形態では、上記補正値K1,K2を用いて、FO2積算値FADVおよびRO2積算値RADVを補正することにより、検出値FV,RVに含まれる理想出力波形からのずれを等価的に補正している。各検出値FV,RVに生じ得る理想出力波形からのずれは、吸入空気量Qと高い相関がある。そこで、ある吸入空気量Qに関して、実際に検出されるであろうA/Fセンサ24a,25aの検出値FV,RVを理想出力波形に近づけるような割合的な値として、実験やシミュレーションを通じて補正値K1,K2を定めておく。そして、様々な吸入空気量Qと各補正値K1,K2との対応関係をマップ或いは計算式として予め定めておけば、吸入空気量Qに応じて各補正値K1,K2を一意に特定することができる。このようにしてマップ化(または計算式化)された補正値K1,K2は、図4の実線(実際の検出値波形)を点線(理想出力波形)に近づけるような値として、FO2積算値FADV(またはRO2積算値RADV)に作用する。換言すれば、補正値K1,K2は、検出値FV(または検出値RV)に生じる吸入空気量Qに応じたずれを相殺するような値としてFO2積算値FADV(またはRO2積算値RADV)に作用する。そのため、これらの積算値から算出される診断値VDIAは、低・高吸入空気量状態、或いは外乱が生じた状況下であっても、これらに起因する理想出力波形からのずれが低減されるため、劣化診断の信頼性の向上を図ることができる。
【0023】
このような補正値K1用のマップおよび補正値K2用のマップは、上記ECU12のROMに格納されている。この補正値K1用のマップ(または補正値K2用のマップ)には、入力変数Qと、出力変数である補正値K1(または補正値K2)との対応関係が記述されている。なお、各A/Fセンサ24a,25aの変化量FDV,RDVを積算している間にも吸入空気量Qは経時的に変動するため、各積算値FADV,RADVを補正する補正値K1,K2を特定する際には、吸入空気量Qに対応したパラメータとして吸入空気量Qの平均値Qaveを用いる。
【0024】
このような概念をふまえた上で、以下、第1の実施形態にかかる触媒劣化診断のシステム処理について説明する。図5は、本実施形態にかかる触媒劣化診断処理の手順を示したフローチャートである。このフローチャートに示す処理は、イグニッションスイッチ(図示せず)がONされることによりECU12に電源が投入され、システムがイニシャライズ(ECU12のバックアップRAMに格納されたトラブルデータおよびフラグFa1,Fa2を除く、各フラグ、カウンタ等の初期化)された後、所定間隔(例えば、50msec)毎に呼び出され、ECU12によって実行される。本実施形態では、エンジン1が始動してからイグニッションスイッチがOFFされることによりエンジン1が停止するまでの間、すなわち、1運転サイクルにおいて、触媒異常という診断結果が1回得られた時点で、この運転サイクルにおける診断が終了する。そして、例えば、2運転サイクル連続して、触媒異常という診断結果が得られた場合に、メイン触媒13aが劣化していると確定される。
【0025】
まず、ステップ1において、診断終了フラグFendが「1」であるか否かが判定される。診断終了フラグFendは初期的には「0」に設定されており、「1」は1運転サイクル中において、メイン触媒13aが既に触媒異常と判定されていることを意味する。そのため、あるタイミングで診断終了フラグFendが「0」から「1」に一旦変更されると、それ以降は運転サイクルが継続する限り、ステップ1の肯定判定に従い、ステップ5の診断処理がスキップすることになる。一方、ステップ1で否定判定された場合、すなわち、1運転サイクルにおいて、未だ触媒異常と判定されていない場合には、ステップ2に進む。
【0026】
ステップ2において、判断部15は、現在の吸入空気量Qが所定の範囲内(A1≦Q≦A2)に存在するか否かを判断する。吸入空気量Qについて、このような条件を設ける理由は、各A/Fセンサ24a,25aが排気系の酸素濃度を検出し得るような吸入空気量状態であるか否かを判断するためである。例えば、吸入空気量Qが極端に小さくなると(Q<A1)、各A/Fセンサ24a,25aが検出を行うことができないレベルまで酸素濃度が低下してしまう可能性がある。また、吸入空気量Qが極端に大きくなると(A2<Q)、いわゆる吹き抜け状態と呼ばれるA/Fセンサ24a,25aの検出範囲を超えた酸素濃度となってしまう可能性がある。この場合、A/Fセンサ24a,25aの検出値が実酸素濃度と異なる値を示す、或いは検出値なしとなるため、メイン触媒13aの診断を正常に行うことができない。そのため、このような吸入空気量領域での診断実行を回避すべく、ステップ5での診断処理に先立ち、ステップ2の判断が設けられている。このステップ2で肯定判定された場合には、続くステップ3に進む。一方、ステップ2で否定判定された場合には、ステップ3からステップ5をスキップして、ステップ6に進む。この場合には、後述するように、カウンタCT、各積算値FADV,RADV,AQ、初回判別フラグFiniをすべて「0」にリセットとした上で(ステップ6)、本ルーチンを抜ける。ただし、本実施形態では、補正値K1,K2を用いてFO2積算値FADV,RADVを補正する関係上、吸入空気量Qを制限する条件(A1,A2)は、従来の触媒劣化診断のそれと比較して、低吸入空気量側および、高吸入空気量側へ拡大するように設定することができる。
【0027】
ステップ3において、判断部15は、入力された各センサ類の検出値に基づき、劣化診断を行うのに適した運転状態を規定する診断許可条件が成立するか否かを判断する。この診断許可条件としては、運転状態を検出する各センサ類の検出値が正常であるか、各A/Fセンサ24a,25aが活性状態であるかといったことが挙げられる。また、この診断許可条件としては、さらに、空燃比制御中であるか、基本燃料噴射量を定める基本燃料噴射パルス幅Tp(=K×Q/NE;Kはインジェクタ特性補正定数、Qは吸入空気量)、スロットル開度θtおよび車速v等が予め設定された範囲内にあるかといったことが挙げられる。このような診断許可条件を設ける理由としては、劣化診断の誤判定を防止するためである。例えば、センサ類の検出値が異常であるにも拘わらず、診断処理を実行してしまうと、不適切な運転状態でそれが実行されてしまうケースが生じ得る。また、各A/Fセンサ24a,25aが非活性であるにも拘わらず、診断処理を実行してしまうと、これらのセンサ24a,25aから検出値が得られないため、誤判定が生じ得る。また、空燃比制御外、すなわち、空燃比オープンループ制御時に診断処理を実行してしまうと、空燃比がストイキ外のリッチまたはリーンに制御されているケースで誤判定が生じ得る。さらに、エンジン運転状態が高負荷高回転領域にある場合に診断処理を実行してしまうと、空燃比がリッチ制御されているため、誤判定が生じ得る。そこで、これらのケースでの診断実行を回避すべく、ステップ5の診断処理に先立ち、ステップ3の判断が設けられている。ステップ3において肯定判定された場合(診断許可条件の成立時)、続くステップ4に進む。一方、このステップ3において否定判定された場合(診断許可条件の非成立時)、ステップ4,5をスキップしてステップ6へ進む。ただし、上述したように、補正値K1,K2を用いて補正を行うため、例えば、車速vなどの条件は、従来の触媒劣化診断のそれと比較してその範囲が拡大するように設定することができる。
【0028】
つぎに、ステップ4において、判断部15は、入力された各種センサの検出値に基づき、診断中止条件が成立するか否かを判断する。この診断中止条件としては、基本燃料噴射パルス幅Tpの変化量、或いはスロットル開度θtの変化量が予め定められた設定値を越えていないかといったことが挙げられる。これらの診断中止条件により、エンジン過渡運転時や、診断中の失火が判断される。加減速等のエンジン過渡運転時には、空燃比がリッチシフト或いはリーンシフトしており、メイン触媒13aの診断を正常に行うことができない。また、失火時には、オーバリーンによってA/Fセンサ24a,25aの検出値が異常値を示すため、メイン触媒13aの診断を正常に行うことができない。そこで、これらのケースでの診断実行を回避すべく、ステップ5の診断処理に先立ち、ステップ4の判断が設けられている。ステップ4において否定判定された場合(診断中止条件非成立時)、続くステップ5に進む。一方、このステップ4において肯定判定された場合(診断中止条件の成立時)、ステップ5をスキップしてステップ6に進む。
【0029】
図6および図7は、第1の実施形態にかかるステップ5に関する詳細な手順を示すフローチャートである。まず、図6に示すステップ10において、演算部16は、メイン触媒13aの診断用センサであるFA/Fセンサ24aの検出値FVnおよびRA/Fセンサ25aの検出値RVnを読み込む。それとともに、演算部16は、吸入空気量センサ20の吸入空気量Qを読み込む。これらのセンサ20,24a,25aの検出値の読み込みが終了すると、ステップ11において診断時間を示すカウンタCTの値がインクリメントされる。
【0030】
ステップ12において、初回判別フラグFiniが「1」であるか否かが判定される。この初回判別フラグFiniは、FA/Fセンサ24aおよびRA/Fセンサ25aからの時系列的な読み込みにおいて、今回の読み込みが初回である否かを判別するフラグであり、以下の4つのケースにおいて「0」に設定される。
(ケース1)本ルーチンの初回実行時
(ケース2)ステップ2で否定判定された直後のルーチン実行時
(ケース3)ステップ3で否定判定された直後のルーチン実行時
(ケース4)ステップ4で肯定判定された直後のルーチン実行時
【0031】
これらのケースでは、センサ24a,25aの前回処理における検出値FVn−1,RVn−1が存在しないので、ステップ14における演算を行うことができない。そこで、初回判別フラグが「0」の場合には、今回のサイクルにおける以降の処理をスキップして次回(50msec後)の処理に備えるべく、ステップ13に進む。そして、ステップ13において初回判別フラグFiniが「1」にセットされた後、本ルーチンを抜ける。一方、このステップ12で肯定判定された場合、すなわち、前回の処理において両A/Fセンサ24a,25aの検出値FVn−1,RVn−1が読み込まれている場合には、ステップ14に進む。
【0032】
ステップ14において、演算部16は、今回読み込まれた検出値FVnと、前回読み込まれた検出値FVn−1との差の絶対値を、FA/Fセンサ24aの検出値の変化量FDVとして算出する。同様に、演算部16は、RA/Fセンサ25aについて、今回読み込まれた検出値RVnと、前回読み込まれた検出値RVn−1とに基づき、変化量RDVを算出する。
【0033】
ステップ15において、FA/Fセンサ24aの変化量FDVの積算値であるFO2積算値FADV(初期値「0」)に、ステップ14で算出された変化量FDVを加算することにより、FO2積算値FADVが更新される。同様に、RA/Fセンサ25aの変化量RDVの積算値であるRO2積算値RADV(初期値「0」)に、ステップ14で算出された変化量RDVを加算することにより、RO2積算値RADVが更新される。そして、ステップ16において、吸入空気量Qの積算値である空気量積算値AQ(初期値「0」)に、今回読み込まれた吸入空気量Qを加算することにより、空気量積算値AQが更新される。
【0034】
図7に示すステップ17において、FO2積算値FADVが所定の判定値FADVthに到達したか否かが判断される。この判定値FADVthを設ける理由は、メイン触媒13aに関する診断値VDIAを精度よく算出するためである。上述したように、診断値VDIAは、FO2積算値FADVに対するRO2積算値RADVの比であり、FO2積算値FADVを基準としたRO2積算値RADVの変化の度合いがその値に反映される。この場合、FA/Fセンサ24aに関する変化量FDVの積算回数が少ないと(すなわち、FO2積算値FADVの値が小さい)、変化量FDVに含まれる一時的な誤差がFO2積算値FADVに大きく反映される。そのため、この一時的な誤差が診断値VDIAの信頼性を低下しかねない。また、メイン触媒13aの劣化状態が診断値VDIAに反映されるには、各積算値FADV,RADVに複数サイクル以上の変化量FDV,RDVの積算が必要とされる。そこで、このような状態での診断値VDIAの算出を回避すべく、ステップ20での診断値算出に先立ち、ステップ17の判断が設けられている。この判定値FADVthは、実験やシミュレーション等を通じて数サイクル以上の積算が行われるように決定されており、一例としてはリッチ、リーンの反転が数回以上繰り返されるような値である。したがって、FO2積算値FADVの値が判定値FADVthに到達するまでは(FADV<FADVth)、ステップ17で肯定判定され、ステップ18以降に進むことなく本ルーチンを抜ける。そして、この積算値FADVが判定値FADVthに到達すると(FADV=FADVth)、ステップ17の判定結果が肯定から否定へと切り替わるため、続くステップ18に進む。
【0035】
ステップ18において、吸入空気量Qの平均値Qaveが算出される。空気量平均値Qaveは、空気量積算値AQを積算に要した時間、すなわち、カウンタCTで割ることにより算出される。
【0036】
そして、ステップ19において、補正部17は、FO2積算値FADVに補正値K1を乗ずることにより、FO2補正値FADV’を算出する。それとともに、補正部17は、RO2積算値RADVに補正値K2を乗ずることにより、RO2補正値RADV’が算出される。上述したように、補正値K1,K2は、吸入空気量Qの平均値Qaveに基づき、FO2積算値FADV用のマップと、RO2積算値RADV用のマップとを参照することによって、それぞれ一義的に特定される。続くステップ20では、メイン触媒13aに関する診断値VDIAが、ステップ19において補正されたFO2補正値FADV’とRO2補正値RADV’との比(RADV’/FADV’)として算出される。
【0037】
ステップ21において、診断部18は、診断値VDIAと、診断しきい値VDIAthとを比較する。この診断しきい値VDIAthは、メイン触媒13aが劣化したとみなし得る診断値VDIAの最大値として、実験やシミュレーション等を通じて決定されている。そのため、診断値VDIAが診断しきい値VDIAth以上の場合には、メイン触媒13aが劣化していると判断し(触媒異常)、ステップ21からステップ22に進む。そして、ステップ22において診断終了フラグFendを「1」にセットしたうえで、図5のステップ6に進む。また、この場合、診断部17は、診断値VDIAを含む各種の値をトラブルデータとして、ECU12のバックアップROMに格納する。そして、例えば触媒異常と診断した初回の運転サイクル時には、ECU12のバックアップROMの所定アドレスに、第1回目の触媒異常を示すフラグFa1を「1」にセットする。また、以前の運転サイクルで既に触媒劣化の診断がなされている場合(すなわち、フラグFa1が既に「1」にセットされている場合)には、ECU12のバックアップROMの所定アドレスに第2回目の触媒異常を示すフラグFa2を「1」にセットするとともに、MILランプ19を点灯或いは点滅させるなどの警報処理を行う。
【0038】
一方、診断値VDIAaが診断しきい値VDIAthよりも小さい場合には、メイン触媒13aが劣化していないと判断し(触媒正常)、ステップ21からステップ23に進む。そして、ステップ23において、診断終了フラグFendを「0」にセットした上で(結果的には「0」のままである)、図5のステップ6に進む。このとき、上述した第1回目の触媒異常を示すフラグFa1、または、このフラグFa1とともに第2回目の触媒異常を示すフラグFa2が「1」にセットされている場合には、触媒正常の判断にともない、これらのフラグFa1,Fa2をともに「0」にリセットする。
【0039】
そして、図5のステップ6において、カウンタCT、FO2積算値FADV、RO2積算値RADV、空気量積算値AQ、および初回判別フラグFiniが「0」にリセットされる。
【0040】
このような触媒の劣化診断処理では、診断結果が触媒正常である限り、診断終了フラグFendが「0」であり続けるので、ステップ2以降の劣化診断に関する一連の手順が繰り返される。一方、1運転サイクルにおいて診断結果が触媒異常となった場合、診断終了フラグFendが「0」から「1」に切り替わる。そのため、それ以降は、ステップ2以降の手順をスキップして、本ルーチンを抜ける。これにより、1運転サイクルにおいて、触媒異常との診断結果が1回得られたら、それ以降の劣化診断は行われない。そして、例えば、2運転サイクルで連続して触媒劣化と診断された場合には、MILランプ19の点灯或いは点滅により、運転者に対して触媒が劣化していることが通知される。また、ディーラ等のサービス工場でのトラブルシューティングにおいて、外部装置(図示せず)をECU12に接続することで、上記フラグFa1,Fa2に対応するトラブルデータを読出し、触媒の劣化を判断することができる。
【0041】
このように第1の実施形態によれば、FO2積算値FADVおよびRO2積算値RADVが、吸入空気量Qに応じた補正値K1,K2により補正される。この補正値K1,K2は、A/Fセンサ24a,25aの検出値FV,RVを理想出力波形に近づけるような値として作用するため、FO2補正値FADV’およびRO2補正値RADV’は、理想出力波形を積算したような値とみなすことができる。そのため、オーバーシュートや外乱などの影響が各補正値FADV’,RADV’から低減されるため、算出される診断値VDIAの信頼性を向上させることができる。また、この補正により、低吸入空気量領域、高吸入空気量領域、或いは外乱などの生じ得る状況下でも精度良く診断値VDIAを算出することができるので、より広範囲な条件で触媒の劣化を診断することができる。この結果、触媒の劣化を早期に捉えることができる。
【0042】
なお、上述した第1の実施形態では、空気量平均値Qaveを用いて補正値K1,K2を特定したが、吸入空気量Qの積算値AQを用いて補正値K1,K2を特定することもできる。この場合には、上記マップとして、入力変数AQと、出力変数である補正値K1(或いは補正値K2)との対応関係が記述しておけばよい。このようなマップを用いる場合であっても、上述した実施形態と同様の効果を奏することができる。
【0043】
(第2の実施形態)
以下、第2の実施形態にかかる触媒劣化診断のシステム処理について説明する。本実施形態の特徴は、上記第1の実施形態と同一のシステム構成を有するものの、劣化診断のシステム処理において相違しており、FO2積算値FADVおよびRO2積算値RADVに対する補正をより細分化された時間単位で行うことにある。すなわち、第1の実施形態では、FO2積算値FADVが判定値FADVthに到達するまで、各A/Fセンサ24a,25aの変化量の積算値FADV,RADVを算出し、その後、各積算値FADV,RADVを補正している。これ対して、第2の実施形態では、FO2積算値FADVが判定値FADVthに到達するまでの期間を複数のスパン(期間)に分割し、分割された一つのスパンの間に積算される各積算値FADV,RADVを補正単位とする。そして、各スパンにおいて補正された両積算値FADV,RADV(すなわち、補正値FADV’,RADV’)を積算し、これらの積算値に基づき、診断値VDIAが算出される。
【0044】
以下、具体的なシステム処理について説明する。第2の実施形態にかかるシステム処理は、図5に示す処理と基本的に同一であるが、ステップ5(図6,7)の診断処理にかかる詳細な手順の一部において相違する。そのため、第1の実施形態と同一の処理については、特に断らない限り、図5〜7および上記説明を準用するものとし、その詳細な説明は省略する。ただし、第2の実施形態では、後述するように積算値FTADV,RTADVがパラメータとして用いられる関係上、ステップ2で否定判定された場合には(または、ステップ3で否定判定された場合、ステップ4で肯定判定された場合)、ステップ6において、上記パラメータ(CT,FADV,RADV,AQ,Fini)に加え、積算値FTADV,RTADVが「0」にセットされる。
【0045】
図8および図9は、第2の実施形態にかかるステップ5に関する詳細な手順を示すフローチャートである。ステップ40においてFA/Fセンサ24aの検出値FVn,RA/Fセンサ25aの検出値RVn、および吸入空気量Qが読み込まれると、ステップ41においてカウンタCTの値がインクリメントされる。そして、図6に示すステップ12の処理と同様に、ステップ42において初回判別フラグFiniが「1」であると判定されると、続くステップ44に進む。そして、ステップ44においてFA/Fセンサ24aの検出値の変化量FDVが算出されるとともに、RA/Fセンサ25aの検出値の変化量RDVが算出される。
【0046】
ステップ45において、FO2積算値FADV(初期値「0」)に、ステップ44で算出された変化量FDVを加算することにより、FO2積算値FADVが更新される。これとともに、RO2積算値RADV(初期値「0」)に、ステップ44で算出された変化量RDVを加算することにより、RO2積算値RADVが更新される。そして、ステップ46において、空気量積算値AQ(初期値「0」)に、今回読み込まれた吸入空気量Qを加算することにより、空気量積算値AQが更新される。
【0047】
つぎに、図9に示すステップ47において、RA/Fセンサ25aの検出値がリッチからリーンへ、或いは、リーンからリッチへ反転したか否かが判定される(リッチ・リーン反転判定)。このステップ47では、第1の実施形態とは相違して、あるスライスレベルを基準として、前回のRO2検出値RVn−1と、今回のRO2検出値RVnとを比較することにより、リッチ・リーン反転の判定が行われる。このような判定を行う理由は、FO2積算値FADVおよびRO2積算値RADVに対する補正を細分化された時間単位で行うためである。FO2積算値FADVが上記判定値FADVthに到達するまでには複数回のリッチ・リーン反転が行われるという知得に基づき、このリッチ・リーンの反転を用いて、FO2積算値FADVが判定値FADVthに到達するまでの期間が複数のスパンに分割される。RA/Fセンサ25aの検出値がリッチのまま、或いは、リーンのままであると、ステップ47で否定判定され、ステップ48以降に進むことなく本ルーチンを抜ける。そして、RA/Fセンサ25aの検出値がリッチからリーンへ、或いは、リーンからリッチへ反転すると、ステップ47の判定結果が否定から肯定へと切り替わるため、続くステップ48に進む。
【0048】
ステップ48では、吸入空気量Qの平均値Qaveが算出される。そして、ステップ49において、FO2積算値FADVに補正値K1を乗ずることにより、FO2補正値FADV’が算出されるとともに、RO2積算値RADVに補正値K2を乗ずることにより、RO2補正値RADV’が算出される。このステップ48では、第1の実施形態と同様に、補正値K1,K2は、空気量平均値Qaveに応じて、FO2積算値FADV用のマップと、RO2積算値RADV用のマップとを参照することによって、一義的に特定される。
【0049】
そして、ステップ50において、FO2補正値FADV’の積算値であるFO2補正積算値FTADV(初期値「0」)に、ステップ49で算出されたFO2補正値FADV’を加算することにより、FO2補正積算値FTADVが更新される。同様に、RO2補正値RADV’の積算値であるRO2補正積算値RTADV(初期値「0」)に、ステップ49で算出されたRO2補正値RADV’を加算することにより、RO2補正積算値RTADVが更新される。
【0050】
ステップ51において、FO2補正積算値FTADVが所定の判定値FTADVthに到達したか否かが判断される。この判定値FTADVthを設ける理由は、第1の実施形態におけるステップ17の判断と同様、メイン触媒13aに関する診断値VDIAを精度よく算出するためである。そのため、FO2補正積算値FTADVの値が判定値FTADVthに到達するまでは(FTADV<FTADVth)、ステップ51の肯定判定され、ステップ52に進む。この場合には、カウンタCT、FO2補正積算値FTADVおよびRO2補正積算値RTADVを除く各積算値FADV,RADV,AQ、および初回判別フラグFiniをすべて「0」にリセットとした上で(ステップ52)、本ルーチンを抜ける。そして、FO2補正積算値FTADVが判定値FTADVthに到達すると(FTADV=FTADVth)、ステップ51の判定結果が肯定から否定へと切り替わるため、続くステップ53に進む。
【0051】
ステップ53では、メイン触媒13aに関する診断値VDIAが、ステップ50において更新されたFO2補正積算値FTADVとRO2補正積算値RTADVとの比(RTADV/FTADV)として算出される。
【0052】
そして、ステップ54において、診断部18は、図7に示すステップ21の処理と同様、診断値VDIAと診断しきい値VDIAthとを比較する。そして、診断値VDIAが診断しきい値VDIAth以上の場合には、メイン触媒13aが劣化していると判断し(触媒異常)、ステップ54からステップ55に進む。そして、ステップ55において診断終了フラグFendを「1」にセットしたうえで、図5のステップ6に進む。一方、診断値VDIAaが診断しきい値VDIAthよりも小さい場合には、メイン触媒13aが劣化していないと判断し(触媒正常)、ステップ54からステップ56に進む。そして、ステップ56において、診断終了フラグFendを「0」にセットした上で(結果的には「0」のままである)、図5のステップ6に進む。そして、上述しように、図5のステップ6において、カウンタCT、FO2積算値FADV、RO2積算値RADV、空気量積算値AQ、および初回判別フラグFiniに加え、さらにFO2補正積算値FTADV、RO2補正積算値RTADVが「0」にリセットされる。
【0053】
このような触媒の劣化診断処理では、診断結果が触媒正常である限り、診断終了フラグFendが「0」であり続けるので、ステップ2以降の劣化診断に関する一連の手順が繰り返される。一方、1運転サイクルにおいて診断結果が触媒異常となった場合、診断終了フラグFendが「0」から「1」に切り替わる。そのため、それ以降は、ステップ2以降の手順をスキップして、本ルーチンを抜ける。これにより、1運転サイクルにおいて、触媒異常との診断結果が1回得られたら、それ以降の劣化診断は行われない。
【0054】
このように、第2の実施形態によれば、リッチ・リーン反転のタイミングにおいて、FO2積算値FADVが判定値FADVthに到達するまでの期間を複数のスパンに分割している。そして、分割された一つのスパンの間に積算される各積算値FADV,RADVを補正し、各スパンにおいて補正された両積算値FADV,RADVを積算することにより、診断値VDIAが算出される。この場合、FO2積算値FADVおよびRO2積算値RADVに対する補正がより細分化された時間単位で行われるので、吸入空気量Qの変動に応じてリニアに補正を行うことができる。これにより、低吸入空気量領域、高吸入空気量領域、或いは外乱などの生じ得る状況下でも精度良く診断値VDIAを算出することができるので、より広範囲な条件で触媒の劣化を診断することができる。この結果、触媒の劣化を早期に捉えることができる。
【0055】
なお、第2の実施形態では、リッチ・リーン反転を用いて細分化された時間単位を設定しているが、本発明はかかる手法にのみ限定されるものではない。例えば、タイマ等を用いて、一定周期毎に、FO2積算値FADVが判定値FADVthに到達するまでの期間を複数のスパンに分割し、分割された一つのスパンの間に積算される各積算値FADV,RADVを補正単位として、上述した手法を実行してもよい。
【0056】
【発明の効果】
このように、本発明では、FO2積算値およびRO2積算値が、吸入空気量に応じた補正値により補正される。そのため、オーバーシュートや外乱など影響が各補正値から低減されるため、算出される診断値の信頼性を向上させることができる。また、この補正により、低吸入空気量領域、高吸入空気量領域、或いは外乱などの生じ得る状況下でも精度良く診断値を算出することができるので、より広範囲な条件で触媒の劣化を診断することができる。この結果、触媒の劣化を早期に捉えることができる。
【図面の簡単な説明】
【図1】本実施形態の一例である四気筒の水平対向式エンジンの全体構成図
【図2】ECUの機能的なブロック構成図
【図3】A/Fセンサの出力値の一例を示す波形図
【図4】RA/Fセンサの検出値を示す出力波形図
【図5】本実施形態にかかる触媒劣化診断処理の手順を示したフローチャート
【図6】第1の実施形態にかかるステップ5に関する詳細な手順を示すフローチャート
【図7】第1の実施形態にかかるステップ5に関する詳細な手順を示すフローチャート
【図8】第2の実施形態にかかるステップ5に関する詳細な手順を示すフローチャート
【図9】第2の実施形態にかかるステップ5に関する詳細な手順を示すフローチャート
【符号の説明】
1 エンジン
2 吸気バルブ
3a インテークマニホールド
3b インテークマニホールド
4 排気バルブ
5a エキゾーストマニホールド
5b エキゾーストマニホールド
6 点火プラグ
7 インジェクタ
8 エアクリーナ
9 エアチャンバ
10 スロットルバルブ
11 電動モータ
12 制御装置(ECU)
13a メイン触媒
13b メイン触媒
14 サブ触媒
15 判断部
16 演算部
17 補正部
18 診断部
19 MILランプ
20 吸入空気量センサ
21 スロットル開度センサ
22 車速センサ
23 エンジン回転数センサ
24a フロント空燃比センサ(FA/Fセンサ)
24b フロント空燃比センサ(FA/Fセンサ)
25a リア空燃比センサ(RA/Fセンサ)
25b リア空燃比センサ(RA/Fセンサ)
【発明の属する技術分野】
本発明は、エンジンの排気系に設けられた触媒の上流と下流とに空燃比センサを設け、両空燃比センサの検出値に基づいて触媒の劣化を診断するエンジンの触媒劣化診断装置に関する。
【0002】
【従来の技術】
従来から、触媒の上流と下流とに空燃比センサを設け、両空燃比センサの出力により空燃比を制御する技術が提案されている。この空燃比制御では、これらの空燃比センサの検出値に基づき、空燃比が所定の値(ストイキ(理論空燃比))に近づくように、エンジンの燃料噴射量が制御される。ところで、空燃比制御を正確に行ったとしても、触媒そのものの性能が劣化するに従い、有害成分の除去率が低下してしまう。そのため、これらの空燃比センサの出力に基づいて触媒の劣化を診断する技術が、例えば、特許文献1に開示されている。
【0003】
本出願人によって既に提案された特許文献1では、まず、触媒の上流に設けられた空燃比センサの出力電圧の変化量(絶対値)が所定時間毎に算出され、この変化量が積算される。また、触媒の下流に設けられた空燃比センサの出力電圧の変化量(絶対値)が所定時間毎に算出され、この変化量が積算される。そして、これらの積算値の比が所定のしきい値と比較され、触媒が劣化しているか否かが診断される。
【0004】
【特許文献1】
特開平10−331627号公報
【0005】
【発明が解決しようとする課題】
しかしながら、従来の劣化診断では、診断結果の信頼性を向上させるため、エンジンに吸入される吸入空気量が特定の範囲内に存在していることを条件として診断を行っている。これは、低吸入空気量側または高吸入空気量側では、吸入空気量が変動した場合に、センサの応答遅れなどに起因して、空燃比センサが過剰な値を示したり、反応が鈍くなったりするといった事態が生じ得るからである。このような場合には、空燃比センサの検出値が真の値からずれてしまい、診断の誤判定に繋がる虞がある。そこで、このような事態を回避すべく、吸入空気量に条件を設け、空燃比センサの検出値に含まれる誤差が少なくなるような状況においてのみ触媒の劣化診断を行っている。また、同様の理由から、外乱が診断に与える影響を低減すべく、例えば、車速が特定の速度範囲に存在するといったことを条件として劣化診断を行っている。
【0006】
特に、近年では、より厳しい排ガス規制が要求されており、この要求を満足するためには触媒の劣化をいち早く診断する必要がある。そのため、吸入空気量や車速といった診断条件を従来よりも広範におよぶ領域にまで拡大して診断を行う必要が生じている。
【0007】
本発明は、かかる事情に鑑みてなされたものであり、その目的は、より広範囲な診断条件で触媒の劣化を診断することである。
【0008】
また、本発明の別の目的は、広範囲な診断条件で触媒の劣化を診断する際に、触媒の劣化の程度を示す診断値の信頼性を向上させることである。
【0009】
【課題を解決するための手段】
かかる課題を解決するために、第1の発明は、エンジンの排気系に設けられた触媒の上流にフロント空燃比センサを設けるとともに、触媒の下流にリア空燃比センサを設け、フロント空燃比センサの検出値とリア空燃比センサの検出値とに基づいて触媒の劣化を診断するエンジンの触媒劣化診断装置を提供する。かかる装置は、演算部と、補正部と、診断部とを有する。演算部は、フロント空燃比センサの検出値の変化量を所定時間毎に算出し、算出された変化量を積算することにより第1の積算値を算出するとともに、リア空燃比センサの検出値の変化量を所定時間毎に算出し、算出された変化量を積算することにより第2の積算値を算出する。補正部は、吸入空気量に応じて第1の補正値を設定し、設定された第1の補正値を用いて第1の積算値を補正するとともに、吸入空気量に応じて第2の補正値を設定し、設定された第2の補正値を用いて第2の積算値を補正する。診断部は、補正された第1の積算値と補正された第2の積算値とに基づいて算出した診断値を、所定の診断しきい値と比較することにより、触媒が劣化しているか否かを診断する。
【0010】
ここで、第1の発明において、診断部は、補正された第1の積算値をリア空燃比センサの検出値がリッチからリーンへ、またはリーンからリッチへ反転する毎に積算した第3の積算値と、補正された第2の積算値をリア空燃比センサの検出値がリッチからリーンへ、またはリーンからリッチへ反転する毎に積算した第4の積算値に基づいて算出した診断値を、所定の診断しきい値と比較することにより、触媒が劣化しているか否かを診断することが好ましい。または、診断部は、補正された第1の積算値を所定時間よりも長い所定の周期毎に積算した第3の積算値と、補正された第2の積算値を所定の周期毎に積算した第4の積算値とに基づいて算出した診断値を、所定の診断しきい値と比較することにより、触媒が劣化しているか否かを診断してもよい。
【0011】
また、第1の発明において、補正部は、所定時間毎の吸入空気量の平均値と第1の補正値とを対応付けたマップまたは計算式に基づき、第1の補正値を設定し、所定時間毎の吸入空気量の平均値と第2の補正値とを対応付けたマップまたは計算式に基づき、第2の補正値を設定することが好ましい。または、補正部は、吸入空気量を所定時間毎に積算した空気量積算値と第1の補正値とを対応付けたマップまたは計算式に基づき、第1の補正値を設定し、空気量積算値と第2の補正値とを対応付けたマップまたは計算式に基づき、第2の補正値を設定してもよい。
【0012】
【発明の実施の形態】
(第1の実施形態)
図1は、本実施形態の一例である四気筒の水平対向式エンジンの全体構成図である。同図には明記されていないが、エンジン1の気筒#1〜#4のうち、気筒#1,#3は左バンクに配置され、気筒#2,#4は右バンクに配置されている。このエンジン1の各吸気ポートには吸気バルブ2が設けられている。これらの吸気ポートのうち、左バンク側(気筒#1,#3)の吸気ポートはインテークマニホールド3aに連通し、右バンク側(気筒#2,#4)の吸気ポートは左バンク側のそれとは独立したインテークマニホールド3bに連通している。一方、エンジン1の各排気ポートには排気バルブ4が設けられている。これらの排気ポートのうち、左バンク側の排気ポートはエキゾーストマニホールド5aに連通し、右バンク側の排気ポートは左バンク側のそれとは独立したエキゾーストマニホールド5bに連通している。また、シリンダヘッドにおいて各気筒#1〜#4の燃焼室の中央には、混合気を着火する点火プラグ6が設けられている。そして、各燃焼室における吸気バルブ2の近傍には、燃焼室内に燃料(ガソリン)を噴射するインジェクタ7が設けられている。
【0013】
吸気通路に設けられたエアクリーナ8は、インテークマニホールド3a,3bに連通したエアチャンバ9に接続されている。エアクリーナ8とエアチャンバ9との間には、吸入空気量を調整する電動スロットルバルブ10が介装されている。このスロットルバルブ10は、電動モータ11によって動作し、アクセルペダル(図示せず)と機械的にリンクした構造とはなっていない。スロットルバルブ10の開度(スロットル開度)は、マイクロコンピュータを中心として構成される制御装置12(以下、「ECU」という)からの出力信号によって設定される。
【0014】
左バンク側の排気系であるエキゾーストマニホールド5aは、排気通路を介してメイン触媒13aに連通している。一方、右バンク側の排気系であるエキゾーストマニホールド5bは、排気通路を介して左バンク側のそれとは別個のメイン触媒13bに連通している。これらのメイン触媒13a,13bの下流側の排気通路は合流しており、その合流位置よりも下流にはサブ触媒14が設けられている。そして、それぞれ独立した排気系から排出される排気ガスは、一方のメイン触媒13a(または13b)とサブ触媒14とにおいて浄化され、マフラーを経て排出される。
【0015】
ECU12は、ROMに記憶された制御プログラムに従い、燃料噴射量、点火時期、スロットル開度等に関する演算を行う。そして、ECU12は、この演算によって算出された制御量(制御信号)を各種アクチュエータに対して出力する。ECU12には、エンジン1等の運転状態を検出するために、センサ20〜25bを含む各種センサからのセンサ信号が入力されている。吸入空気量センサ20は、エアクリーナ8の直下流に設けられており、吸入空気量Qを検出するホットワイヤ式またはホットフィルム式のセンサである。スロットル開度センサ21はスロットル開度θtを検出し、車速センサ22は車速vを検出する。エンジン回転数センサ23は、エンジン回転数Neを検出するセンサであり、エンジン1のクランクシャフトと一体的に回転するクランクロータの外周近傍に配置されたクランク角センサを用いることできる。空燃比センサ24a,24b,25a,25bは、排ガス中の酸素濃度を検出するセンサであり、個々のメイン触媒13a,13bにおける直上流と直下流とにそれぞれ設けられている。具体的には、左バンク側のメイン触媒13aの直上流にはフロント空燃比センサ24a(以下、「FA/Fセンサ」という)が設けられており、この触媒13aの直下流で、かつ、排気通路の合流位置よりも上流にはリア空燃比センサ25a(以下、「RA/Fセンサ」という)が設けられている。一方、右バンク側のメイン触媒13bの直上流にはFA/Fセンサ24bが設けられており、メイン触媒13bの直下流で、かつ排気通路の合流位置よりも上流にはRA/Fセンサ25bが設けられている。なお、これらのA/Fセンサ24a〜25bとしては、空燃比センサを用いることに限定されず、周知の酸素センサを用いることもできる。ただし、空燃比制御の観点から、広範囲の酸素濃度を検出する空燃比センサ(例えば、リニアO2センサ)を用いることが好ましい。
【0016】
図2は、ECU12の機能的なブロック構成図である。上記構造を有するエンジン1において、触媒(本実施形態では、左バンク側のメイン触媒13a)の劣化を診断する場合、ECU12は、これを機能的に捉えると、判断部15と、演算部16と、補正部17と、診断部18とで構成される。判断部15は、エンジン1の運転状態に基づいて診断条件が成立するか否かを判断する。この判断部15によって診断条件が成立したと判断されると、演算部16は、診断対象となるメイン触媒13aの直上流に設けられたFA/Fセンサ24aの検出値の変化量FDV(絶対値)を所定時間毎に算出し、この変化量FDVを積算することによりFO2積算値FADVを算出する。それとともに、演算部16は、このメイン触媒13aの直下流に設けられたRA/Fセンサ25aの検出値の変化量RDV(絶対値)を所定時間毎に算出し、この変化量RDVを積算することによりRO2積算値RADVを算出する。また、演算部16は、吸入空気量センサ20の検出値である吸入空気量Qを所定時間毎に積算し、空気量積算値AQを算出する。これらの積算値FADV,RADV,AQは、補正部17に対して出力される。この補正部17は、吸入空気量Q(正確には、吸入空気量Qの平均値Qave(空気量積算値AQ/積算に要する時間))に応じて、FO2積算値FADV用の補正値K1を特定するとともに、RO2積算値RADV用の補正値K2を特定する。これらの補正値K1,K2は、後述するように、ECU12のROMに格納された各積算値FADV,RADV用のマップを参照することにより、一意に特定される。補正部17は、補正値K1を用いてFO2積算値FADVを補正し、補正値K2を用いてRO2積算値RADVを補正する。そして、補正されたFO2積算値FADV(以下、「FO2補正値FADV’」という)と、補正されたRO2積算値RADV(以下、「RO2補正値RADV’」という)とが診断部18に対して出力される。診断部18は、これらの補正値FADV’,RADV’に基づいて、診断値VDIA(本実施形態では、VDIA=RADV’/FADV’)、すなわち、フロント触媒13aの劣化の程度を示す値として用い、メイン触媒13aが劣化しているか否かを診断する。
【0017】
なお、上記エンジン1では、各メイン触媒13a,13bを別個の制御対象として空燃比制御を行う関係上、個々のメイン触媒13a,13bについてFA/Fセンサ(24a,24b)とRA/Fセンサ(25a,25b)とが設けられている。ただし、一方のメイン触媒13a(またはメイン触媒13b)を対象として劣化診断を行えば、他方のそれも同等に劣化しているであろうと推定できるため、本実施形態では、例示的に、左バンク側のメイン触媒13aのみを診断対象として処理が行われる。また、劣化の進行度合いが最も大きい排気系の上流に位置するメイン触媒13aのみを診断対象とし、各バンクの排気通路が合流した後に設けられているサブ触媒14を診断対象から除外している。
【0018】
つぎに、第1の実施形態における触媒劣化診断の概略について説明する。図3は、A/Fセンサの出力電圧の一例を示す波形図である。同図に示すように、メイン触媒13aの上流に設けられるFA/Fセンサ24aの出力電圧FV(すなわち、検出値)、または、この触媒13aの下流に設けられるRA/Fセンサ25aの検出値RVには、リーン(検出値FV(或いは、RV)がスライスレベルよりも小さい状態)からリッチ(検出値FV(或いは、RV)がスライスレベルよりも大きい状態)への上昇変化と、リッチからリーンへの下降変化とがある。これらのセンサ24a,25aのうち、FA/Fセンサ24aの検出値FVは、エンジン1の排気ガス中の酸素濃度に応じて変動する(同図(a))。一方、RA/Fセンサ25aの検出値RVは、メイン触媒13aの酸素(O2)ストレージ効果により排気ガス中の酸素濃度が低下するため、基本的に、FA/Fセンサ24aのリッチからリーンへの反転周期よりも、その反転周期が長くなる(同図(b))。ところが、メイン触媒13aの劣化が経時的に進行すると、O2ストレージ効果も低下するため、RA/Fセンサ25aの検出値RVは、位相遅れがあるもののFA/Fセンサ24aの出力波形に近似していく。すなわち、メイン触媒13aが劣化した場合、RA/Fセンサ25aのリッチからリーンへの反転周期はメイン触媒13aが新品の状態に比べて短くなるとともに、スライスレベルを基準としたリッチ、リーンの変化幅は大きくなる(同図(c))。
【0019】
FA/Fセンサ24aに関して、所定時間毎(例えば、50msec毎)に、前回(すなわち、50msec前)の検出値FVn−1と、現在の検出値FVnとの変化量FDV(絶対値)が算出され、算出された値がFO2積算値FADVとして積算される。また、RA/Fセンサ25aに関して、前回の検出値RVn−1と、現在の検出値RVnとの変化量RDV(絶対値)が算出され、この算出された値がRO2積算値RADVとして積算される。そして、FO2積算値FADVに対するRO2積算値RADVの比(RO2積算値RADV/FO2積算値RADV)が算出される。このとき、メイン触媒13aの劣化にともない(例えば、RA/Fセンサ25aの検出値RVが図3(b)の状態から図3(c)の状態になるに従い)、この積算値の比が大きくなっていく。そのため、この積算値の比をメイン触媒13aの劣化の程度を示す値(すなわち、診断値VDIA)として考えることで、メイン触媒13aの劣化を捉えることができる。
【0020】
ところで、触媒劣化の進行時間よりも短い時間単位で捉えた場合、各A/Fセンサ24a,25aの検出値は、正常な運転状態を維持している限り(例えば、車速vが一定)、基本的に、スライスレベルを基準に一定の変化幅でリッチ・リーンの反転を繰り返す(以下、このような状況を「理想出力波形」という)。しかしながら、以下に示すような状況では、A/Fセンサの応答遅れなどに起因して、各A/Fセンサ24a,25aの検出値が、必ずしも理想出力波形を満たすような値として出力されないことがある。例えば、吸入空気量Qが低吸入空気量側へシフトしている状況では、吸入空気量Qが変動した場合、各A/Fセンサ24a,25aの検出値FV,RVに、例えば、オーバーシュートと呼ばれる理想出力波形よりも変化幅が大きくなる現象が発生することがある。一方、吸入空気量Qが高吸入空気量側へシフトしている状況では、吸入空気量Qが変動した場合、各A/Fセンサ24a,25aの検出値FV,RVに、例えば、理想出力波形よりも変化幅が小さくなる現象が発生することがある。また、外乱の影響が作用すると、低・高吸入空気量側に吸入空気量Qがシフトしていない場合であっても、吸入空気量Qの変化とともに、検出値FV,RFに理想出力波形からのずれが生じることがある。特に、RA/Fセンサ25aについては、この現象が現れ易い。
【0021】
図4は、RA/Fセンサ25aの検出値を示す出力波形図である。同図には、出力波形の一例として、オーバーシュートが発生した様子が描かれている。上述したように診断値VDIAはFO2積算値FADVとRO2積算値RADVとの比として算出される関係上、変化量RDVにオーバーシュートに起因した変化量が含まれると、この影響が診断値VDIAに反映されてしまう。したがって、図4に示すような状況では、実際はメイン触媒13aが劣化していないにも拘わらず、あたかもメイン触媒13aが劣化したとみなし得るような値として診断値VDIAが算出されてしまう。そのため、このようなオーバーシュートといった理想出力波形からのずれが検出値FV,RVに生じた場合には、メイン触媒13aの劣化を正確に捉えられなくなる可能性がある。
【0022】
そこで、本実施形態では、上記補正値K1,K2を用いて、FO2積算値FADVおよびRO2積算値RADVを補正することにより、検出値FV,RVに含まれる理想出力波形からのずれを等価的に補正している。各検出値FV,RVに生じ得る理想出力波形からのずれは、吸入空気量Qと高い相関がある。そこで、ある吸入空気量Qに関して、実際に検出されるであろうA/Fセンサ24a,25aの検出値FV,RVを理想出力波形に近づけるような割合的な値として、実験やシミュレーションを通じて補正値K1,K2を定めておく。そして、様々な吸入空気量Qと各補正値K1,K2との対応関係をマップ或いは計算式として予め定めておけば、吸入空気量Qに応じて各補正値K1,K2を一意に特定することができる。このようにしてマップ化(または計算式化)された補正値K1,K2は、図4の実線(実際の検出値波形)を点線(理想出力波形)に近づけるような値として、FO2積算値FADV(またはRO2積算値RADV)に作用する。換言すれば、補正値K1,K2は、検出値FV(または検出値RV)に生じる吸入空気量Qに応じたずれを相殺するような値としてFO2積算値FADV(またはRO2積算値RADV)に作用する。そのため、これらの積算値から算出される診断値VDIAは、低・高吸入空気量状態、或いは外乱が生じた状況下であっても、これらに起因する理想出力波形からのずれが低減されるため、劣化診断の信頼性の向上を図ることができる。
【0023】
このような補正値K1用のマップおよび補正値K2用のマップは、上記ECU12のROMに格納されている。この補正値K1用のマップ(または補正値K2用のマップ)には、入力変数Qと、出力変数である補正値K1(または補正値K2)との対応関係が記述されている。なお、各A/Fセンサ24a,25aの変化量FDV,RDVを積算している間にも吸入空気量Qは経時的に変動するため、各積算値FADV,RADVを補正する補正値K1,K2を特定する際には、吸入空気量Qに対応したパラメータとして吸入空気量Qの平均値Qaveを用いる。
【0024】
このような概念をふまえた上で、以下、第1の実施形態にかかる触媒劣化診断のシステム処理について説明する。図5は、本実施形態にかかる触媒劣化診断処理の手順を示したフローチャートである。このフローチャートに示す処理は、イグニッションスイッチ(図示せず)がONされることによりECU12に電源が投入され、システムがイニシャライズ(ECU12のバックアップRAMに格納されたトラブルデータおよびフラグFa1,Fa2を除く、各フラグ、カウンタ等の初期化)された後、所定間隔(例えば、50msec)毎に呼び出され、ECU12によって実行される。本実施形態では、エンジン1が始動してからイグニッションスイッチがOFFされることによりエンジン1が停止するまでの間、すなわち、1運転サイクルにおいて、触媒異常という診断結果が1回得られた時点で、この運転サイクルにおける診断が終了する。そして、例えば、2運転サイクル連続して、触媒異常という診断結果が得られた場合に、メイン触媒13aが劣化していると確定される。
【0025】
まず、ステップ1において、診断終了フラグFendが「1」であるか否かが判定される。診断終了フラグFendは初期的には「0」に設定されており、「1」は1運転サイクル中において、メイン触媒13aが既に触媒異常と判定されていることを意味する。そのため、あるタイミングで診断終了フラグFendが「0」から「1」に一旦変更されると、それ以降は運転サイクルが継続する限り、ステップ1の肯定判定に従い、ステップ5の診断処理がスキップすることになる。一方、ステップ1で否定判定された場合、すなわち、1運転サイクルにおいて、未だ触媒異常と判定されていない場合には、ステップ2に進む。
【0026】
ステップ2において、判断部15は、現在の吸入空気量Qが所定の範囲内(A1≦Q≦A2)に存在するか否かを判断する。吸入空気量Qについて、このような条件を設ける理由は、各A/Fセンサ24a,25aが排気系の酸素濃度を検出し得るような吸入空気量状態であるか否かを判断するためである。例えば、吸入空気量Qが極端に小さくなると(Q<A1)、各A/Fセンサ24a,25aが検出を行うことができないレベルまで酸素濃度が低下してしまう可能性がある。また、吸入空気量Qが極端に大きくなると(A2<Q)、いわゆる吹き抜け状態と呼ばれるA/Fセンサ24a,25aの検出範囲を超えた酸素濃度となってしまう可能性がある。この場合、A/Fセンサ24a,25aの検出値が実酸素濃度と異なる値を示す、或いは検出値なしとなるため、メイン触媒13aの診断を正常に行うことができない。そのため、このような吸入空気量領域での診断実行を回避すべく、ステップ5での診断処理に先立ち、ステップ2の判断が設けられている。このステップ2で肯定判定された場合には、続くステップ3に進む。一方、ステップ2で否定判定された場合には、ステップ3からステップ5をスキップして、ステップ6に進む。この場合には、後述するように、カウンタCT、各積算値FADV,RADV,AQ、初回判別フラグFiniをすべて「0」にリセットとした上で(ステップ6)、本ルーチンを抜ける。ただし、本実施形態では、補正値K1,K2を用いてFO2積算値FADV,RADVを補正する関係上、吸入空気量Qを制限する条件(A1,A2)は、従来の触媒劣化診断のそれと比較して、低吸入空気量側および、高吸入空気量側へ拡大するように設定することができる。
【0027】
ステップ3において、判断部15は、入力された各センサ類の検出値に基づき、劣化診断を行うのに適した運転状態を規定する診断許可条件が成立するか否かを判断する。この診断許可条件としては、運転状態を検出する各センサ類の検出値が正常であるか、各A/Fセンサ24a,25aが活性状態であるかといったことが挙げられる。また、この診断許可条件としては、さらに、空燃比制御中であるか、基本燃料噴射量を定める基本燃料噴射パルス幅Tp(=K×Q/NE;Kはインジェクタ特性補正定数、Qは吸入空気量)、スロットル開度θtおよび車速v等が予め設定された範囲内にあるかといったことが挙げられる。このような診断許可条件を設ける理由としては、劣化診断の誤判定を防止するためである。例えば、センサ類の検出値が異常であるにも拘わらず、診断処理を実行してしまうと、不適切な運転状態でそれが実行されてしまうケースが生じ得る。また、各A/Fセンサ24a,25aが非活性であるにも拘わらず、診断処理を実行してしまうと、これらのセンサ24a,25aから検出値が得られないため、誤判定が生じ得る。また、空燃比制御外、すなわち、空燃比オープンループ制御時に診断処理を実行してしまうと、空燃比がストイキ外のリッチまたはリーンに制御されているケースで誤判定が生じ得る。さらに、エンジン運転状態が高負荷高回転領域にある場合に診断処理を実行してしまうと、空燃比がリッチ制御されているため、誤判定が生じ得る。そこで、これらのケースでの診断実行を回避すべく、ステップ5の診断処理に先立ち、ステップ3の判断が設けられている。ステップ3において肯定判定された場合(診断許可条件の成立時)、続くステップ4に進む。一方、このステップ3において否定判定された場合(診断許可条件の非成立時)、ステップ4,5をスキップしてステップ6へ進む。ただし、上述したように、補正値K1,K2を用いて補正を行うため、例えば、車速vなどの条件は、従来の触媒劣化診断のそれと比較してその範囲が拡大するように設定することができる。
【0028】
つぎに、ステップ4において、判断部15は、入力された各種センサの検出値に基づき、診断中止条件が成立するか否かを判断する。この診断中止条件としては、基本燃料噴射パルス幅Tpの変化量、或いはスロットル開度θtの変化量が予め定められた設定値を越えていないかといったことが挙げられる。これらの診断中止条件により、エンジン過渡運転時や、診断中の失火が判断される。加減速等のエンジン過渡運転時には、空燃比がリッチシフト或いはリーンシフトしており、メイン触媒13aの診断を正常に行うことができない。また、失火時には、オーバリーンによってA/Fセンサ24a,25aの検出値が異常値を示すため、メイン触媒13aの診断を正常に行うことができない。そこで、これらのケースでの診断実行を回避すべく、ステップ5の診断処理に先立ち、ステップ4の判断が設けられている。ステップ4において否定判定された場合(診断中止条件非成立時)、続くステップ5に進む。一方、このステップ4において肯定判定された場合(診断中止条件の成立時)、ステップ5をスキップしてステップ6に進む。
【0029】
図6および図7は、第1の実施形態にかかるステップ5に関する詳細な手順を示すフローチャートである。まず、図6に示すステップ10において、演算部16は、メイン触媒13aの診断用センサであるFA/Fセンサ24aの検出値FVnおよびRA/Fセンサ25aの検出値RVnを読み込む。それとともに、演算部16は、吸入空気量センサ20の吸入空気量Qを読み込む。これらのセンサ20,24a,25aの検出値の読み込みが終了すると、ステップ11において診断時間を示すカウンタCTの値がインクリメントされる。
【0030】
ステップ12において、初回判別フラグFiniが「1」であるか否かが判定される。この初回判別フラグFiniは、FA/Fセンサ24aおよびRA/Fセンサ25aからの時系列的な読み込みにおいて、今回の読み込みが初回である否かを判別するフラグであり、以下の4つのケースにおいて「0」に設定される。
(ケース1)本ルーチンの初回実行時
(ケース2)ステップ2で否定判定された直後のルーチン実行時
(ケース3)ステップ3で否定判定された直後のルーチン実行時
(ケース4)ステップ4で肯定判定された直後のルーチン実行時
【0031】
これらのケースでは、センサ24a,25aの前回処理における検出値FVn−1,RVn−1が存在しないので、ステップ14における演算を行うことができない。そこで、初回判別フラグが「0」の場合には、今回のサイクルにおける以降の処理をスキップして次回(50msec後)の処理に備えるべく、ステップ13に進む。そして、ステップ13において初回判別フラグFiniが「1」にセットされた後、本ルーチンを抜ける。一方、このステップ12で肯定判定された場合、すなわち、前回の処理において両A/Fセンサ24a,25aの検出値FVn−1,RVn−1が読み込まれている場合には、ステップ14に進む。
【0032】
ステップ14において、演算部16は、今回読み込まれた検出値FVnと、前回読み込まれた検出値FVn−1との差の絶対値を、FA/Fセンサ24aの検出値の変化量FDVとして算出する。同様に、演算部16は、RA/Fセンサ25aについて、今回読み込まれた検出値RVnと、前回読み込まれた検出値RVn−1とに基づき、変化量RDVを算出する。
【0033】
ステップ15において、FA/Fセンサ24aの変化量FDVの積算値であるFO2積算値FADV(初期値「0」)に、ステップ14で算出された変化量FDVを加算することにより、FO2積算値FADVが更新される。同様に、RA/Fセンサ25aの変化量RDVの積算値であるRO2積算値RADV(初期値「0」)に、ステップ14で算出された変化量RDVを加算することにより、RO2積算値RADVが更新される。そして、ステップ16において、吸入空気量Qの積算値である空気量積算値AQ(初期値「0」)に、今回読み込まれた吸入空気量Qを加算することにより、空気量積算値AQが更新される。
【0034】
図7に示すステップ17において、FO2積算値FADVが所定の判定値FADVthに到達したか否かが判断される。この判定値FADVthを設ける理由は、メイン触媒13aに関する診断値VDIAを精度よく算出するためである。上述したように、診断値VDIAは、FO2積算値FADVに対するRO2積算値RADVの比であり、FO2積算値FADVを基準としたRO2積算値RADVの変化の度合いがその値に反映される。この場合、FA/Fセンサ24aに関する変化量FDVの積算回数が少ないと(すなわち、FO2積算値FADVの値が小さい)、変化量FDVに含まれる一時的な誤差がFO2積算値FADVに大きく反映される。そのため、この一時的な誤差が診断値VDIAの信頼性を低下しかねない。また、メイン触媒13aの劣化状態が診断値VDIAに反映されるには、各積算値FADV,RADVに複数サイクル以上の変化量FDV,RDVの積算が必要とされる。そこで、このような状態での診断値VDIAの算出を回避すべく、ステップ20での診断値算出に先立ち、ステップ17の判断が設けられている。この判定値FADVthは、実験やシミュレーション等を通じて数サイクル以上の積算が行われるように決定されており、一例としてはリッチ、リーンの反転が数回以上繰り返されるような値である。したがって、FO2積算値FADVの値が判定値FADVthに到達するまでは(FADV<FADVth)、ステップ17で肯定判定され、ステップ18以降に進むことなく本ルーチンを抜ける。そして、この積算値FADVが判定値FADVthに到達すると(FADV=FADVth)、ステップ17の判定結果が肯定から否定へと切り替わるため、続くステップ18に進む。
【0035】
ステップ18において、吸入空気量Qの平均値Qaveが算出される。空気量平均値Qaveは、空気量積算値AQを積算に要した時間、すなわち、カウンタCTで割ることにより算出される。
【0036】
そして、ステップ19において、補正部17は、FO2積算値FADVに補正値K1を乗ずることにより、FO2補正値FADV’を算出する。それとともに、補正部17は、RO2積算値RADVに補正値K2を乗ずることにより、RO2補正値RADV’が算出される。上述したように、補正値K1,K2は、吸入空気量Qの平均値Qaveに基づき、FO2積算値FADV用のマップと、RO2積算値RADV用のマップとを参照することによって、それぞれ一義的に特定される。続くステップ20では、メイン触媒13aに関する診断値VDIAが、ステップ19において補正されたFO2補正値FADV’とRO2補正値RADV’との比(RADV’/FADV’)として算出される。
【0037】
ステップ21において、診断部18は、診断値VDIAと、診断しきい値VDIAthとを比較する。この診断しきい値VDIAthは、メイン触媒13aが劣化したとみなし得る診断値VDIAの最大値として、実験やシミュレーション等を通じて決定されている。そのため、診断値VDIAが診断しきい値VDIAth以上の場合には、メイン触媒13aが劣化していると判断し(触媒異常)、ステップ21からステップ22に進む。そして、ステップ22において診断終了フラグFendを「1」にセットしたうえで、図5のステップ6に進む。また、この場合、診断部17は、診断値VDIAを含む各種の値をトラブルデータとして、ECU12のバックアップROMに格納する。そして、例えば触媒異常と診断した初回の運転サイクル時には、ECU12のバックアップROMの所定アドレスに、第1回目の触媒異常を示すフラグFa1を「1」にセットする。また、以前の運転サイクルで既に触媒劣化の診断がなされている場合(すなわち、フラグFa1が既に「1」にセットされている場合)には、ECU12のバックアップROMの所定アドレスに第2回目の触媒異常を示すフラグFa2を「1」にセットするとともに、MILランプ19を点灯或いは点滅させるなどの警報処理を行う。
【0038】
一方、診断値VDIAaが診断しきい値VDIAthよりも小さい場合には、メイン触媒13aが劣化していないと判断し(触媒正常)、ステップ21からステップ23に進む。そして、ステップ23において、診断終了フラグFendを「0」にセットした上で(結果的には「0」のままである)、図5のステップ6に進む。このとき、上述した第1回目の触媒異常を示すフラグFa1、または、このフラグFa1とともに第2回目の触媒異常を示すフラグFa2が「1」にセットされている場合には、触媒正常の判断にともない、これらのフラグFa1,Fa2をともに「0」にリセットする。
【0039】
そして、図5のステップ6において、カウンタCT、FO2積算値FADV、RO2積算値RADV、空気量積算値AQ、および初回判別フラグFiniが「0」にリセットされる。
【0040】
このような触媒の劣化診断処理では、診断結果が触媒正常である限り、診断終了フラグFendが「0」であり続けるので、ステップ2以降の劣化診断に関する一連の手順が繰り返される。一方、1運転サイクルにおいて診断結果が触媒異常となった場合、診断終了フラグFendが「0」から「1」に切り替わる。そのため、それ以降は、ステップ2以降の手順をスキップして、本ルーチンを抜ける。これにより、1運転サイクルにおいて、触媒異常との診断結果が1回得られたら、それ以降の劣化診断は行われない。そして、例えば、2運転サイクルで連続して触媒劣化と診断された場合には、MILランプ19の点灯或いは点滅により、運転者に対して触媒が劣化していることが通知される。また、ディーラ等のサービス工場でのトラブルシューティングにおいて、外部装置(図示せず)をECU12に接続することで、上記フラグFa1,Fa2に対応するトラブルデータを読出し、触媒の劣化を判断することができる。
【0041】
このように第1の実施形態によれば、FO2積算値FADVおよびRO2積算値RADVが、吸入空気量Qに応じた補正値K1,K2により補正される。この補正値K1,K2は、A/Fセンサ24a,25aの検出値FV,RVを理想出力波形に近づけるような値として作用するため、FO2補正値FADV’およびRO2補正値RADV’は、理想出力波形を積算したような値とみなすことができる。そのため、オーバーシュートや外乱などの影響が各補正値FADV’,RADV’から低減されるため、算出される診断値VDIAの信頼性を向上させることができる。また、この補正により、低吸入空気量領域、高吸入空気量領域、或いは外乱などの生じ得る状況下でも精度良く診断値VDIAを算出することができるので、より広範囲な条件で触媒の劣化を診断することができる。この結果、触媒の劣化を早期に捉えることができる。
【0042】
なお、上述した第1の実施形態では、空気量平均値Qaveを用いて補正値K1,K2を特定したが、吸入空気量Qの積算値AQを用いて補正値K1,K2を特定することもできる。この場合には、上記マップとして、入力変数AQと、出力変数である補正値K1(或いは補正値K2)との対応関係が記述しておけばよい。このようなマップを用いる場合であっても、上述した実施形態と同様の効果を奏することができる。
【0043】
(第2の実施形態)
以下、第2の実施形態にかかる触媒劣化診断のシステム処理について説明する。本実施形態の特徴は、上記第1の実施形態と同一のシステム構成を有するものの、劣化診断のシステム処理において相違しており、FO2積算値FADVおよびRO2積算値RADVに対する補正をより細分化された時間単位で行うことにある。すなわち、第1の実施形態では、FO2積算値FADVが判定値FADVthに到達するまで、各A/Fセンサ24a,25aの変化量の積算値FADV,RADVを算出し、その後、各積算値FADV,RADVを補正している。これ対して、第2の実施形態では、FO2積算値FADVが判定値FADVthに到達するまでの期間を複数のスパン(期間)に分割し、分割された一つのスパンの間に積算される各積算値FADV,RADVを補正単位とする。そして、各スパンにおいて補正された両積算値FADV,RADV(すなわち、補正値FADV’,RADV’)を積算し、これらの積算値に基づき、診断値VDIAが算出される。
【0044】
以下、具体的なシステム処理について説明する。第2の実施形態にかかるシステム処理は、図5に示す処理と基本的に同一であるが、ステップ5(図6,7)の診断処理にかかる詳細な手順の一部において相違する。そのため、第1の実施形態と同一の処理については、特に断らない限り、図5〜7および上記説明を準用するものとし、その詳細な説明は省略する。ただし、第2の実施形態では、後述するように積算値FTADV,RTADVがパラメータとして用いられる関係上、ステップ2で否定判定された場合には(または、ステップ3で否定判定された場合、ステップ4で肯定判定された場合)、ステップ6において、上記パラメータ(CT,FADV,RADV,AQ,Fini)に加え、積算値FTADV,RTADVが「0」にセットされる。
【0045】
図8および図9は、第2の実施形態にかかるステップ5に関する詳細な手順を示すフローチャートである。ステップ40においてFA/Fセンサ24aの検出値FVn,RA/Fセンサ25aの検出値RVn、および吸入空気量Qが読み込まれると、ステップ41においてカウンタCTの値がインクリメントされる。そして、図6に示すステップ12の処理と同様に、ステップ42において初回判別フラグFiniが「1」であると判定されると、続くステップ44に進む。そして、ステップ44においてFA/Fセンサ24aの検出値の変化量FDVが算出されるとともに、RA/Fセンサ25aの検出値の変化量RDVが算出される。
【0046】
ステップ45において、FO2積算値FADV(初期値「0」)に、ステップ44で算出された変化量FDVを加算することにより、FO2積算値FADVが更新される。これとともに、RO2積算値RADV(初期値「0」)に、ステップ44で算出された変化量RDVを加算することにより、RO2積算値RADVが更新される。そして、ステップ46において、空気量積算値AQ(初期値「0」)に、今回読み込まれた吸入空気量Qを加算することにより、空気量積算値AQが更新される。
【0047】
つぎに、図9に示すステップ47において、RA/Fセンサ25aの検出値がリッチからリーンへ、或いは、リーンからリッチへ反転したか否かが判定される(リッチ・リーン反転判定)。このステップ47では、第1の実施形態とは相違して、あるスライスレベルを基準として、前回のRO2検出値RVn−1と、今回のRO2検出値RVnとを比較することにより、リッチ・リーン反転の判定が行われる。このような判定を行う理由は、FO2積算値FADVおよびRO2積算値RADVに対する補正を細分化された時間単位で行うためである。FO2積算値FADVが上記判定値FADVthに到達するまでには複数回のリッチ・リーン反転が行われるという知得に基づき、このリッチ・リーンの反転を用いて、FO2積算値FADVが判定値FADVthに到達するまでの期間が複数のスパンに分割される。RA/Fセンサ25aの検出値がリッチのまま、或いは、リーンのままであると、ステップ47で否定判定され、ステップ48以降に進むことなく本ルーチンを抜ける。そして、RA/Fセンサ25aの検出値がリッチからリーンへ、或いは、リーンからリッチへ反転すると、ステップ47の判定結果が否定から肯定へと切り替わるため、続くステップ48に進む。
【0048】
ステップ48では、吸入空気量Qの平均値Qaveが算出される。そして、ステップ49において、FO2積算値FADVに補正値K1を乗ずることにより、FO2補正値FADV’が算出されるとともに、RO2積算値RADVに補正値K2を乗ずることにより、RO2補正値RADV’が算出される。このステップ48では、第1の実施形態と同様に、補正値K1,K2は、空気量平均値Qaveに応じて、FO2積算値FADV用のマップと、RO2積算値RADV用のマップとを参照することによって、一義的に特定される。
【0049】
そして、ステップ50において、FO2補正値FADV’の積算値であるFO2補正積算値FTADV(初期値「0」)に、ステップ49で算出されたFO2補正値FADV’を加算することにより、FO2補正積算値FTADVが更新される。同様に、RO2補正値RADV’の積算値であるRO2補正積算値RTADV(初期値「0」)に、ステップ49で算出されたRO2補正値RADV’を加算することにより、RO2補正積算値RTADVが更新される。
【0050】
ステップ51において、FO2補正積算値FTADVが所定の判定値FTADVthに到達したか否かが判断される。この判定値FTADVthを設ける理由は、第1の実施形態におけるステップ17の判断と同様、メイン触媒13aに関する診断値VDIAを精度よく算出するためである。そのため、FO2補正積算値FTADVの値が判定値FTADVthに到達するまでは(FTADV<FTADVth)、ステップ51の肯定判定され、ステップ52に進む。この場合には、カウンタCT、FO2補正積算値FTADVおよびRO2補正積算値RTADVを除く各積算値FADV,RADV,AQ、および初回判別フラグFiniをすべて「0」にリセットとした上で(ステップ52)、本ルーチンを抜ける。そして、FO2補正積算値FTADVが判定値FTADVthに到達すると(FTADV=FTADVth)、ステップ51の判定結果が肯定から否定へと切り替わるため、続くステップ53に進む。
【0051】
ステップ53では、メイン触媒13aに関する診断値VDIAが、ステップ50において更新されたFO2補正積算値FTADVとRO2補正積算値RTADVとの比(RTADV/FTADV)として算出される。
【0052】
そして、ステップ54において、診断部18は、図7に示すステップ21の処理と同様、診断値VDIAと診断しきい値VDIAthとを比較する。そして、診断値VDIAが診断しきい値VDIAth以上の場合には、メイン触媒13aが劣化していると判断し(触媒異常)、ステップ54からステップ55に進む。そして、ステップ55において診断終了フラグFendを「1」にセットしたうえで、図5のステップ6に進む。一方、診断値VDIAaが診断しきい値VDIAthよりも小さい場合には、メイン触媒13aが劣化していないと判断し(触媒正常)、ステップ54からステップ56に進む。そして、ステップ56において、診断終了フラグFendを「0」にセットした上で(結果的には「0」のままである)、図5のステップ6に進む。そして、上述しように、図5のステップ6において、カウンタCT、FO2積算値FADV、RO2積算値RADV、空気量積算値AQ、および初回判別フラグFiniに加え、さらにFO2補正積算値FTADV、RO2補正積算値RTADVが「0」にリセットされる。
【0053】
このような触媒の劣化診断処理では、診断結果が触媒正常である限り、診断終了フラグFendが「0」であり続けるので、ステップ2以降の劣化診断に関する一連の手順が繰り返される。一方、1運転サイクルにおいて診断結果が触媒異常となった場合、診断終了フラグFendが「0」から「1」に切り替わる。そのため、それ以降は、ステップ2以降の手順をスキップして、本ルーチンを抜ける。これにより、1運転サイクルにおいて、触媒異常との診断結果が1回得られたら、それ以降の劣化診断は行われない。
【0054】
このように、第2の実施形態によれば、リッチ・リーン反転のタイミングにおいて、FO2積算値FADVが判定値FADVthに到達するまでの期間を複数のスパンに分割している。そして、分割された一つのスパンの間に積算される各積算値FADV,RADVを補正し、各スパンにおいて補正された両積算値FADV,RADVを積算することにより、診断値VDIAが算出される。この場合、FO2積算値FADVおよびRO2積算値RADVに対する補正がより細分化された時間単位で行われるので、吸入空気量Qの変動に応じてリニアに補正を行うことができる。これにより、低吸入空気量領域、高吸入空気量領域、或いは外乱などの生じ得る状況下でも精度良く診断値VDIAを算出することができるので、より広範囲な条件で触媒の劣化を診断することができる。この結果、触媒の劣化を早期に捉えることができる。
【0055】
なお、第2の実施形態では、リッチ・リーン反転を用いて細分化された時間単位を設定しているが、本発明はかかる手法にのみ限定されるものではない。例えば、タイマ等を用いて、一定周期毎に、FO2積算値FADVが判定値FADVthに到達するまでの期間を複数のスパンに分割し、分割された一つのスパンの間に積算される各積算値FADV,RADVを補正単位として、上述した手法を実行してもよい。
【0056】
【発明の効果】
このように、本発明では、FO2積算値およびRO2積算値が、吸入空気量に応じた補正値により補正される。そのため、オーバーシュートや外乱など影響が各補正値から低減されるため、算出される診断値の信頼性を向上させることができる。また、この補正により、低吸入空気量領域、高吸入空気量領域、或いは外乱などの生じ得る状況下でも精度良く診断値を算出することができるので、より広範囲な条件で触媒の劣化を診断することができる。この結果、触媒の劣化を早期に捉えることができる。
【図面の簡単な説明】
【図1】本実施形態の一例である四気筒の水平対向式エンジンの全体構成図
【図2】ECUの機能的なブロック構成図
【図3】A/Fセンサの出力値の一例を示す波形図
【図4】RA/Fセンサの検出値を示す出力波形図
【図5】本実施形態にかかる触媒劣化診断処理の手順を示したフローチャート
【図6】第1の実施形態にかかるステップ5に関する詳細な手順を示すフローチャート
【図7】第1の実施形態にかかるステップ5に関する詳細な手順を示すフローチャート
【図8】第2の実施形態にかかるステップ5に関する詳細な手順を示すフローチャート
【図9】第2の実施形態にかかるステップ5に関する詳細な手順を示すフローチャート
【符号の説明】
1 エンジン
2 吸気バルブ
3a インテークマニホールド
3b インテークマニホールド
4 排気バルブ
5a エキゾーストマニホールド
5b エキゾーストマニホールド
6 点火プラグ
7 インジェクタ
8 エアクリーナ
9 エアチャンバ
10 スロットルバルブ
11 電動モータ
12 制御装置(ECU)
13a メイン触媒
13b メイン触媒
14 サブ触媒
15 判断部
16 演算部
17 補正部
18 診断部
19 MILランプ
20 吸入空気量センサ
21 スロットル開度センサ
22 車速センサ
23 エンジン回転数センサ
24a フロント空燃比センサ(FA/Fセンサ)
24b フロント空燃比センサ(FA/Fセンサ)
25a リア空燃比センサ(RA/Fセンサ)
25b リア空燃比センサ(RA/Fセンサ)
Claims (5)
- エンジンの排気系に設けられた触媒の上流にフロント空燃比センサを設けるとともに、前記触媒の下流にリア空燃比センサを設け、前記フロント空燃比センサの検出値と前記リア空燃比センサの検出値とに基づいて前記触媒の劣化を診断する装置において、
前記フロント空燃比センサの検出値の変化量を所定時間毎に算出し、当該算出された変化量を積算することにより第1の積算値を算出するとともに、前記リア空燃比センサの検出値の変化量を所定時間毎に算出し、当該算出された変化量を積算することにより第2の積算値を算出する演算部と、
吸入空気量に応じて第1の補正値を設定し、当該設定された第1の補正値を用いて前記第1の積算値を補正するとともに、前記吸入空気量に応じて第2の補正値を設定し、当該設定された第2の補正値を用いて前記第2の積算値を補正する補正部と、
前記補正された第1の積算値と前記補正された第2の積算値とに基づいて算出した診断値を、所定の診断しきい値と比較することにより、前記触媒が劣化しているか否かを診断する診断部と
を有することを特徴とするエンジンの触媒劣化診断装置。 - 前記診断部は、前記補正された第1の積算値を前記リア空燃比センサの検出値がリッチからリーンへ、またはリーンからリッチへ反転する毎に積算した第3の積算値と、前記補正された第2の積算値を前記リア空燃比センサの検出値がリッチからリーンへ、またはリーンからリッチへ反転する毎に積算した第4の積算値とに基づいて算出した診断値を、所定の診断しきい値と比較することにより、前記触媒が劣化しているか否かを診断することを特徴とする請求項1に記載されたエンジンの触媒劣化診断装置。
- 前記診断部は、前記補正された第1の積算値を前記所定時間よりも長い所定の周期毎に積算した第3の積算値と、前記補正された第2の積算値を前記所定の周期毎に積算した第4の積算値とに基づいて算出した診断値を、所定の診断しきい値と比較することにより、前記触媒が劣化しているか否かを診断することを特徴とする請求項1に記載されたエンジンの触媒劣化診断装置。
- 前記補正部は、所定時間毎の前記吸入空気量の平均値と第1の補正値とを対応付けたマップまたは計算式に基づき、前記第1の補正値を設定し、所定時間毎の前記吸入空気量の平均値と第2の補正値とを対応付けたマップまたは計算式に基づき、前記第2の補正値を設定することを特徴とする請求項1から3のいずれかに記載されたエンジンの触媒劣化診断装置。
- 前記補正部は、前記吸入空気量を所定時間毎に積算した空気量積算値と第1の補正値とを対応付けたマップまたは計算式に基づき、前記第1の補正値を設定し、前記空気量積算値と第2の補正値とを対応付けたマップまたは計算式に基づき、前記第2の補正値を設定することを特徴とする請求項1から3のいずれかに記載されたエンジンの触媒劣化診断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003024675A JP2004232602A (ja) | 2003-01-31 | 2003-01-31 | エンジンの触媒劣化診断装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003024675A JP2004232602A (ja) | 2003-01-31 | 2003-01-31 | エンジンの触媒劣化診断装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004232602A true JP2004232602A (ja) | 2004-08-19 |
Family
ID=32953144
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003024675A Withdrawn JP2004232602A (ja) | 2003-01-31 | 2003-01-31 | エンジンの触媒劣化診断装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004232602A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006273239A (ja) * | 2005-03-30 | 2006-10-12 | Fujitsu Ten Ltd | 車両制御装置及び車両の停止方法 |
| WO2007091542A1 (ja) * | 2006-02-08 | 2007-08-16 | Toyota Jidosha Kabushiki Kaisha | V型ディーゼルエンジンの吸気制御装置 |
| KR101395849B1 (ko) | 2013-02-25 | 2014-05-15 | 주식회사 현대케피코 | 촉매 파손 검출 장치 및 그 방법 |
| KR101797049B1 (ko) | 2011-12-16 | 2017-11-13 | 콘티넨탈 오토모티브 시스템 주식회사 | 촉매고장 판정 방법 |
-
2003
- 2003-01-31 JP JP2003024675A patent/JP2004232602A/ja not_active Withdrawn
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006273239A (ja) * | 2005-03-30 | 2006-10-12 | Fujitsu Ten Ltd | 車両制御装置及び車両の停止方法 |
| WO2007091542A1 (ja) * | 2006-02-08 | 2007-08-16 | Toyota Jidosha Kabushiki Kaisha | V型ディーゼルエンジンの吸気制御装置 |
| US7953540B2 (en) | 2006-02-08 | 2011-05-31 | Toyota Jidosha Kabushiki Kaisha | Air intake control device of V-diesel engine |
| CN101379280B (zh) * | 2006-02-08 | 2012-01-18 | 丰田自动车株式会社 | V型柴油机的进气控制装置 |
| KR101797049B1 (ko) | 2011-12-16 | 2017-11-13 | 콘티넨탈 오토모티브 시스템 주식회사 | 촉매고장 판정 방법 |
| KR101395849B1 (ko) | 2013-02-25 | 2014-05-15 | 주식회사 현대케피코 | 촉매 파손 검출 장치 및 그 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7103467B2 (en) | Device for detecting response characteristics of sensor | |
| US6915203B2 (en) | Apparatus and method for diagnosis of vehicular system | |
| JP4320778B2 (ja) | 空燃比センサの異常診断装置 | |
| US7681565B2 (en) | Air/fuel ratio control system for internal combustion engine | |
| JP2893308B2 (ja) | 内燃機関の空燃比制御装置 | |
| JP2005163696A (ja) | 内燃機関の失火検出装置 | |
| JP2007262945A (ja) | 排出ガスセンサの異常診断装置 | |
| JP5533471B2 (ja) | 触媒劣化診断装置 | |
| JP2010025090A (ja) | 空燃比センサの異常診断装置 | |
| JP5112382B2 (ja) | 内燃機関の酸素センサ診断装置 | |
| JP2007127027A (ja) | エンジンの触媒劣化診断装置及びその方法および排気ガス浄化用の触媒装置 | |
| JP2007332914A (ja) | 触媒劣化検出装置 | |
| JP2008144639A (ja) | 内燃機関の制御装置 | |
| US8640532B2 (en) | Apparatus and method for detecting abnormal air-fuel ratio variation between cylinders | |
| JP4193869B2 (ja) | 排ガス浄化触媒の劣化診断装置 | |
| JP2010163932A (ja) | 内燃機関の触媒劣化診断装置 | |
| JP2000328930A (ja) | エンジンの触媒劣化診断装置 | |
| JP2004232602A (ja) | エンジンの触媒劣化診断装置 | |
| JPH07310585A (ja) | 筒内圧センサの診断装置 | |
| US12092002B2 (en) | Control device for internal combustion engine and catalyst deterioration diagnostic method | |
| JP2005214073A (ja) | 可変バルブリフト制御システムの異常診断装置 | |
| JP2013181486A (ja) | 内燃機関の制御装置 | |
| JP5654514B2 (ja) | エンジンの吸入空気量測定装置 | |
| JP4283556B2 (ja) | エンジンの触媒劣化診断装置 | |
| JP4651694B2 (ja) | 排気浄化触媒の劣化診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20060404 |