JP2004232700A - 中空モータによるナット駆動方式のアクティブマスダンパー - Google Patents
中空モータによるナット駆動方式のアクティブマスダンパー Download PDFInfo
- Publication number
- JP2004232700A JP2004232700A JP2003020728A JP2003020728A JP2004232700A JP 2004232700 A JP2004232700 A JP 2004232700A JP 2003020728 A JP2003020728 A JP 2003020728A JP 2003020728 A JP2003020728 A JP 2003020728A JP 2004232700 A JP2004232700 A JP 2004232700A
- Authority
- JP
- Japan
- Prior art keywords
- screw shaft
- motor
- hollow motor
- nut
- hollow
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title abstract description 6
- 238000001514 detection method Methods 0.000 claims abstract description 5
- 238000013016 damping Methods 0.000 claims description 9
- 238000006073 displacement reaction Methods 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
Images


Landscapes
- Vibration Prevention Devices (AREA)
- Transmission Devices (AREA)
Abstract
【解決手段】モータ駆動方式のアクティブマスダンパーにおいて、ネジ軸の両端が構造物に固定されており、前記ネジ軸とネジ結合されたナットはネジ軸が貫通する中空構造の中空モータで直接回転駆動される。前記中空モータは、前記ネジ軸と同方向に移動自在に設置されたマスへ一体的に取り付けられている。構造物の振動を計測する振動センサーの検出信号に基づいて前記中空モータが駆動制御され能動的制振機能を発揮する。
【選択図】図1
Description
【発明の属する技術分野】
この発明は、モータ駆動方式のアクティブマスダンパーの技術分野に属し、更に言えば、中空モータでナットを直接回転駆動する方式のアクティブマスダンパーに関する。
【0002】
【従来の技術】
従来、モータ駆動方式のアクティブマスダンパーは、種々の構造形式が公知であり、実用にも供されている。
従来一般のモータ駆動方式のアクティブマスダンパーを分類すると、
(A)ネジ軸をモータで回転駆動する方式であって、(a1)ナットをマスに固定し、モータを構造物の側に設置してネジ軸を回転駆動する制振装置が、特許文献1に開示されている。この特許文献1には、ネジ機構にボールネジ機構を採用した構成も明解に記載されている。同様にネジ軸をモータで回転駆動する方式であっても、(a2)モータをマスに設置してネジ軸を回転駆動し、ナットを構造物の側に固定した制振装置が、特許文献2に開示されている。
(B)逆に、ネジ軸を構造物へ固定し、ナットをモータで回転駆動する方式であって、モータ及びナットを共にマスの側に設置した制振装置が、特許文献3、4に開示されている。
(C)なお、念のために説明すると、ピニオン及びこれを回転駆動するモータをマスの方に設置し、前記ピニオンが噛み合うラックを構造物の側に長く設置した制振装置が、特許文献5に開示されている。
【0003】
【特許文献1】
特開平2−300478号公報
【特許文献2】
特開2001−280410号公報
【特許文献3】
特許第2670156号公報
【特許文献4】
特許第2603161号公報
【特許文献5】
特許第2727796号公報
【0004】
【発明が解決しようとする課題】
上記(A)のネジ軸をモータで回転駆動する方式の場合は、ネジ軸の慣性モーメントが大きいため、マスを移動させるためにモータが発生する動力のうちの10%〜50%がネジ軸を回転させるために消費される。また、マスに必要とされる変位量が大きくなると、必然的にネジ軸の有効長さもそれなりに長大となり、このネジ軸を回転させるために必要なモータ動力の割合は益々大きくなり、大出力モータが必要となる。のみならず、ネジ軸の座屈の問題が大きくなり、或いは軸剛性が低下する問題も発生するので、ネジ軸の直径を飛躍的に大きなものとせざるを得ず、非常に高価なネジ軸となるし、モータの動力効率は一層悪化する。結局はネジ機構(ボールネジ機構)自体の設計が出来なくなるなどの問題があり、マスの変位量を大きくすることに限界があることが知られている。上記特許文献5の発明は、前記の問題をラック・ピニオン機構の採用により解決を図っていることが認められる。
【0005】
上記(B)のように、ネジ軸を構造物の側へ固定し、ナットをモータで回転駆動する方式、特に特許文献3、4のようにナット及びモータを共にマスに設置した制振装置は、(A)について説明した上記問題点はないし、ナット及びモータの重量をマスに附加できる利点も認められる。しかし、特許文献3、4に開示された従来技術はいずれも、モータの出力軸とナットを例えば歯車列の如き伝動機構で連結して間接的に回転駆動する構成なので、伝動機構が存在する分だけ構成が複雑化、大型化することを避けられない。そして、伝動効率の分だけモータの動力効率が低下する。その上、伝動機構に発生する遊びやガタの分だけ制振装置の応答に微妙な遅れが発生して制振効果が低下する等々の欠点、問題点が認められる。
【0006】
本発明の目的は、マスの変位量(ストローク)が大きくても、モータの動力効率に優れ、電力消費量が少なくて済み、また、ネジ軸の設計に無理が無く、比較的に軽量、小型な装置としてに実施できる、モータ駆動方式のアクティブマスダンパーを提供することである。
【0007】
本発明の究極の目的は、中心部をネジ軸が貫通する中空モータをマスに設置して使用し、しかもこの中空モータでナットを直接回転駆動する構成とした、中空モータによるナット駆動方式のアクティブマスダンパーを提供することである。
【0008】
【課題を解決するための手段】
上述の課題を解決するための手段として、請求項1に記載した発明に係る中空モータによるナット駆動方式のアクティブマスダンパーは、
モータ駆動方式のアクティブマスダンパーにおいて、
ネジ軸の両端が構造物に固定されており、前記ネジ軸とネジ結合されたナットはネジ軸が貫通する中空構造の中空モータで直接回転駆動されること、
前記中空モータは、前記ネジ軸と同方向に移動自在に設置されたマスへ一体的に取り付けられていること、
構造物の振動を計測する振動センサーの検出信号に基づいて前記中空モータが駆動制御され能動的制振機能を発揮することを特徴とする。
【0009】
請求項2に記載した発明は、請求項1に記載した中空モータによるナット駆動方式のアクティブマスダンパーにおいて、
中空モータはサーボモータであり、ネジ軸及びナットはボールを介して低摩擦で運動するボールネジ機構で構成され、マスは直動レールによりネジ軸と同方向に移動自在に設置されていることを特徴とする。
【0010】
なお、本発明において言う中空モータは、例えば特開平6−292340号公報に開示された中空モータ、特開平6−300106号公報に開示された電動アクチュエータの動力源である中空モータ、特開2000−257604号公報に開示された直動駆動装置に採用された中空モータ、或いは特開2001−218422号公報に開示された中空アクチュエータとして既に種々公知である、内外に同心円筒状に配置された内側のロータと外側のステータとの組み合わせから成るもので、内側のロータが中空円筒状に構成されたモータを指している。
【0011】
【発明の実施形態】
以下に、図面に示した本発明の実施形態を説明する。
図1〜図3は、請求項1、2に記載した発明に係る中空モータによるナット駆動方式のアクティブマスダンパーの実施形態を示している。
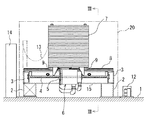
制振対象である建物その他の構造物1に固定して設けた四隅の架台2、2のうち、縦方向に相対峙するもの同士の上に、縦桁3、3が強固に固定されている。そして、図1の方向に見て、左右の縦桁3、3間に、必要な有効長さを有するネジ軸4の両端部が架設され、夫々強固に固定されている。
【0012】
上記ネジ軸4とネジ結合されたナット5を直接回転駆動するモータは、ネジ軸4が貫通する中空構造の中空モータ6であり、マス7の下面へ一体的に取り付けられている。したがって、前記ナット5及び中空モータ6は、マス7と一体的に移動するのであり、マス7への附加重量となる。
マス7は、上記ネジ軸4と同一方向に、左右の縦桁3、3間に架設された2本の平行な直動レール8、8(直動ガイド、直動ベアリング、リニアガイド、リニアレール等々)の上を滑走するガイドシュー9、9を介して移動自在に設置されている。具体的には、左右の縦桁3、3と合一に組み立てた横桁15、15が上記架台2の上に架設され、各横桁15、15の上に前記直動レール8が設置されている。中空モータ6は、前記2本の平行な直動レール8、8の中間位置に配置された前記ネジ軸4に沿って移動するのであり、同モータ6のケーシングが直接、マス7の下面へボルト止め等の手段により強固に取り付けられている。図中の符号20は、当該アクティブマスダンパーの外装ケーシングである。
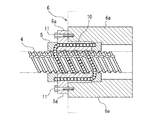
【0013】
因みに、ネジ軸4とナット5は、図4に主要部構造を示したように、多数の小さなボール10を介して低摩擦で運動するボールネジ機構で構成されている。ナット5のフランジ部5aが、中空モータ6の内筒を形成するロータコア6aの一端部と止めネジ11で接合され、一体的に回転する構成とされている。ネジ軸4は、ロータコア6aの中空部内を軸方向に貫通されている。中空モータ6は高精度な制御が可能ないわゆるサーボモータであり、ブレーキ内蔵型であるが、その具体的構成の如何を問うものではないので、詳細な図示は省略した。
【0014】
一方、構造物1の振動を計測する振動センサー12(加速度センサー、速度センサー、変位センサー等を含む。)が構造物1へ直接設置されている。同振動センサー12で計測された検出信号は、制御盤14(図1)の入力として導かれる。前記振動センサー12の検出信号に基づいて制御盤14の演算処理部が生成した制御信号は、中空モータ6の動力線も含むフレキシブルワイヤ13を通じて前記中空モータ6へ送られる。要するに、制御盤14の働きにより、中空モータ6の回転方向と回転速度、回転角等の適切な駆動制御が行われ、マス7を移動させて構造物1に対する能動的制振機能を発揮するのである。
【0015】
その場合に、中空モータ6はナット5を直接回転駆動するので、伝動効率の問題が無いし、伝動機構に懸念されるガタや遊びが無い分だけ応答精度の向上を期待できる。また、ナット5自身はネジ軸4に比して慣性モーメントが遙かに小さいし、しかも低摩擦のボールネジ機構で構成されているので、モータの動力効率に優れ、中空モータ6は相対的に小型で低出力のもので済み、電力消費量も削減出来る等々の利点がある。両端を固定されたネジ軸4は、マス7に必要とされる変位量(振幅ストローク)が大きくなっても、座屈や軸剛性の問題もさしたることがなく、その直径の増大を抑制でき、設計の無理を生じない。従って、全体として、軽量、小型で経済性に優れた装置となる。
【0016】
【発明の効果】
請求項1、2に記載した発明に係るモータ駆動方式のアクティブマスダンパーは、マスの変位量(ストローク)が大きくても、モータの動力効率に優れ、電力消費量が少なくて済み、また、ネジ軸の設計に無理が無く、比較的に軽量、小型な装置として提供できる。
【0017】
また、本発明のアクティブマスダンパーは、中心部をネジ軸が貫通する中空モータをマスに設置して使用し、しかもこの中空モータでナットを直接回転駆動する構成としたので、例えばネジ軸の長さ方向の実質寸法を短くして小型化を図ることが可能であり、相対的に長いストロークで高効率のダンパーを無理なく設計、製作出来るのである。
【図面の簡単な説明】
【図1】本発明に係るアクティブマスダンパーの実施形態を示した立面図である。
【図2】同上の平面図である。
【図3】図2のIII−III矢視図である。
【図4】ナットと中空モータの取り合い構造を示した主要部の拡大断面図ある。
【符号の説明】
4 ネジ軸
1 構造物
5 ナット
6 中空モータ
7 マス
12 振動センサー
14 制御盤
Claims (2)
- モータ駆動方式のアクティブマスダンパーにおいて、
ネジ軸の両端が構造物に固定されており、前記ネジ軸とネジ結合されたナットはネジ軸が貫通する中空構造の中空モータで直接回転駆動されること、
前記中空モータは、前記ネジ軸と同方向に移動自在に設置されたマスへ一体的に取り付けられていること、
構造物の振動を計測する振動センサーの検出信号に基づいて前記中空モータが駆動制御され能動的制振機能を発揮することを特徴とする、中空モータによるナット駆動方式のアクティブマスダンパー。 - 中空モータはサーボモータであり、ネジ軸及びナットはボールを介して低摩擦で運動するボールネジ機構で構成され、マスは直動レールによりネジ軸と同方向に移動自在に設置されていることを特徴とする、請求項1に記載した中空モータによるナット駆動方式のアクティブマスダンパー。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003020728A JP3827643B2 (ja) | 2003-01-29 | 2003-01-29 | 中空モータによるナット駆動方式のアクティブマスダンパー |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003020728A JP3827643B2 (ja) | 2003-01-29 | 2003-01-29 | 中空モータによるナット駆動方式のアクティブマスダンパー |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004232700A true JP2004232700A (ja) | 2004-08-19 |
| JP3827643B2 JP3827643B2 (ja) | 2006-09-27 |
Family
ID=32950277
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003020728A Expired - Fee Related JP3827643B2 (ja) | 2003-01-29 | 2003-01-29 | 中空モータによるナット駆動方式のアクティブマスダンパー |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3827643B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010037820A (ja) * | 2008-08-05 | 2010-02-18 | Takenaka Komuten Co Ltd | 解体建物の振動制御方法 |
| JP2010065411A (ja) * | 2008-09-09 | 2010-03-25 | Takenaka Komuten Co Ltd | アクティブマスダンパー、及び解体建物の振動制御方法 |
| CN102116357A (zh) * | 2011-03-10 | 2011-07-06 | 哈尔滨工程大学 | 一种悬臂式半主动吸振器 |
| CN117450226A (zh) * | 2023-12-21 | 2024-01-26 | 智龙直线(瑞金)科技有限公司 | 一种自监测行星滚柱丝杠副及其监测方法 |
-
2003
- 2003-01-29 JP JP2003020728A patent/JP3827643B2/ja not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010037820A (ja) * | 2008-08-05 | 2010-02-18 | Takenaka Komuten Co Ltd | 解体建物の振動制御方法 |
| JP2010065411A (ja) * | 2008-09-09 | 2010-03-25 | Takenaka Komuten Co Ltd | アクティブマスダンパー、及び解体建物の振動制御方法 |
| CN102116357A (zh) * | 2011-03-10 | 2011-07-06 | 哈尔滨工程大学 | 一种悬臂式半主动吸振器 |
| CN117450226A (zh) * | 2023-12-21 | 2024-01-26 | 智龙直线(瑞金)科技有限公司 | 一种自监测行星滚柱丝杠副及其监测方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP3827643B2 (ja) | 2006-09-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6513398B1 (en) | Electromotive adjustment assembly | |
| CN108827571B (zh) | 两自由度柔性臂振动检测控制装置及方法 | |
| KR20180063112A (ko) | 단일 구동 리지드-플렉시블 커플링 정밀 운동 플랫폼 및 그의 구현 방법과 응용 | |
| CN104260106A (zh) | 一种可变刚度的关节模块 | |
| JP4437844B2 (ja) | 工作機械用スピンドル駆動機構 | |
| US8106545B2 (en) | Linear actuator unit | |
| JP2004232700A (ja) | 中空モータによるナット駆動方式のアクティブマスダンパー | |
| WO2018113368A1 (zh) | 一种球形机器人 | |
| CN103522079B (zh) | 双弹簧预紧柔性解耦直线电机定位平台 | |
| CN203481990U (zh) | 高度集成的机电作动器 | |
| US4897588A (en) | Double motor feed control system | |
| CN201693368U (zh) | 直线电机驱动的气悬浮运动平台 | |
| JP6007953B2 (ja) | 送りねじ装置の軸方向剛性変化抑制方法 | |
| JP2018188247A (ja) | エレベータ装置 | |
| JP5590376B2 (ja) | 電動モータ | |
| CN1535797A (zh) | 两自由度平面并联高速高精度机器人 | |
| JP5530335B2 (ja) | アクティブ免震装置、及びアクティブ免震構造 | |
| JP4627414B2 (ja) | アクチュエータ及び運動案内装置 | |
| CN107782614B (zh) | 车辆构件刚度测试加载装置 | |
| CN214101077U (zh) | 减震驱动机构 | |
| CN211107443U (zh) | 一种用于轨道巡检机器人的刹车驻车装置 | |
| JP7290815B2 (ja) | リニアモータ駆動装置及び表面形状測定装置 | |
| JP3166992B2 (ja) | 構造物の制振装置 | |
| JP2005014741A (ja) | 電動パワーステアリング装置 | |
| CN214999195U (zh) | 一种正反向丝杠传动的模组 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050825 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050905 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051024 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060227 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060424 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060606 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060704 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 3827643 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100714 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110714 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120714 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120714 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130714 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |