JP2004233132A - 電気時計の位置検出システム - Google Patents
電気時計の位置検出システム Download PDFInfo
- Publication number
- JP2004233132A JP2004233132A JP2003020083A JP2003020083A JP2004233132A JP 2004233132 A JP2004233132 A JP 2004233132A JP 2003020083 A JP2003020083 A JP 2003020083A JP 2003020083 A JP2003020083 A JP 2003020083A JP 2004233132 A JP2004233132 A JP 2004233132A
- Authority
- JP
- Japan
- Prior art keywords
- electrode
- signal
- detection
- wheel
- transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Electromechanical Clocks (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
【課題】薄型構造で消費電力が少なく、信頼性の高い電気時計の位置検出システムを実現する。
【解決手段】回路基板6に形成される固定電極6a、6bから位相の異なる信号を送信し、前記固定電極6a、6bに対向して配置された検出車7の回転電極7bの回転位置によって変調された信号を前記回転電極7bで受信し、受信した信号を回転軸7c及び信号伝達バネ8を経由してIC1へ伝達し、伝達された受信信号を前記IC1の位置検出回路によって、あらかじめ用意された基準信号と位相比較して前記検出車7の角度回転位置を検出し、時計の表示針の機械的位置を検出する構成とする。
【選択図】 図1
【解決手段】回路基板6に形成される固定電極6a、6bから位相の異なる信号を送信し、前記固定電極6a、6bに対向して配置された検出車7の回転電極7bの回転位置によって変調された信号を前記回転電極7bで受信し、受信した信号を回転軸7c及び信号伝達バネ8を経由してIC1へ伝達し、伝達された受信信号を前記IC1の位置検出回路によって、あらかじめ用意された基準信号と位相比較して前記検出車7の角度回転位置を検出し、時計の表示針の機械的位置を検出する構成とする。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は水晶発振回路を基準信号源として時刻やカレンダ情報を機械的に表示する電気時計において、輪列等の回転角度や回転位置を電場検出により検出し、機械的な誤動作を防止して正確な時刻情報を表示する電気時計の位置検出システムの構成に関するものである。
【0002】
【従来の技術】
従来、電気時計の低電力化技術が確立され、電気時計の電力源としては、小型の1次電池が使用されている。しかしながら、1次電池は使い捨て電池であり、その電池交換の煩わしさもさることながら、1次電池の使い捨てによる地球環境汚染が将来的にますます問題になると予測される。このような背景から、1次電池に替わるものとして、太陽電池によるソーラー発電、大気中の温度と腕の温度差を利用した熱電発電、回転錘による機械的発電等のエネルギー源からの発電エネルギーを2次電池等に充電して使用する発電式電気時計が実用化されている。
【0003】
しかるに、上記発電式電気時計は、地球環境に優しいという利点はあるものの、採取できるエネルギーに余裕がなく、2次電池に充電される充電エネルギーの欠乏は時刻保持に対する信頼性を損なうという潜在的な問題があった。特に機械式のアナログ腕時計においては、エネルギー消費をできるだけ少なくするために最小限の駆動トルクで輪列機構を駆動している。このため指針の形状が大きいと衝撃や外乱等を受けて指針の時刻表示にズレを生じる恐れがあり、これを防止するために指針の形状や大きさに一定の制限があった。
【0004】
さらに、機械的な指針で時刻を表示する機械式電気時計のカレンダ表示機構において、日付表示部の月末処理を、ほぼ2ヶ月毎に手動で日付修正する必要があるため、非常に煩わしく使い難いという問題があった。複雑な機構を用いれば月末自動修正機能の追加は可能であるが、このような機能は機構が複雑なため組み立てコストが高くなり、また、長期間の安定動作に対する信頼性も低下する。更に消費電力が増加するため、充電エネルギーで無停止動作させることが困難であった。これを防止するために、日付部のみ電気光学的な液晶表示にすると、時刻表示面にデザイン上の違和感が生じてしまう。
【0005】
上記の欠点を解決するためには、指針式表示やカレンダ表示の機械的角度や回転位置を検出する機能が必要である。従来提案されている技術としては、(1)回転する輪列の一部に機械的スイッチを設けている(例えば、特許文献1参照。)。また、(2)発光素子と受光素子とを穴を有する回転輪列を挟んで配置して回転時の穴の有無を受光素子によって検出するものがある(例えば、特許文献2参照。)。さらに、(3)回転部材を利用して電極間の容量変化を電子検出手段で読み取る容量値検出によるものもある(例えば、特許文献3参照。)。
【0006】
【特許文献1】
特開昭57−67877号公報(第2頁、図2)
【特許文献2】
特開平8−179058号公報(特許請求の範囲、図1)
【特許文献3】
特表2001−524206号公報(特許請求の範囲、図1)
【0007】
【発明が解決しようとする課題】
しかしながら、今までに提案されている位置検出機構にはそれぞれ多くの課題を有していた。上記(1)の機械的接触スイッチ機構を利用する位置検出は、輪列等の回転運動部材に接触して位置を検出する構造のため、駆動エネルギーを多く必要とするという課題がある。特に発電エネルギーに余裕の少ない発電式電気時計には大きな問題であり、位置検出を行なうためにかえって位置ズレ発生の原因にもなりかねず、また、接触式のスイッチ機構は接触部材の磨耗劣化の恐れがあり、信頼性が低いという課題があった。
【0008】
また、上記(2)の光学的センサを利用した構造においては、発光素子と受光素子を回転運動する部材の上下面に配置する必要があるので、時計の厚みが増加してしまうという課題があり、このため、薄型の腕時計への適応は不可能であった。また発光素子や受光素子等の光学素子を動作させるためにはかなりの消費電力が必要になり、そのため一日に1回程度の検出頻度しか応用できない。また発光のためには一定値以上の高い閾値電圧の駆動電圧が必要なため高電圧制約があり、電源電圧の変動の大きい発電式電気時計には適応しづらいという課題もあった。
【0009】
さらに、上記(3)の回転部材を利用して電極間の容量変化を直接検出する構成については、腕時計サイズのごく小さな位置検出部品から検出される容量値の変化は微小であるために検出精度が低く、構成部品の携帯姿勢による位置変化や温度変化等の外部環境からの影響を受けやすく、位置検出の信頼性が極めて低いという課題があった。
【0010】
本発明の目的は、上記課題を解決して、大きなエネルギーを必要とせず、接点式検出機構の経時変化による信頼性の低下を防止し、また、光学的センサ方式と比較して薄型構造を実現し、且つ発光素子を駆動するための高電圧を必要とせず、さらに、静電容量値や磁力の絶対量の変化の検出方式と比較して温度等外部環境からの影響を受けない、高い信頼性の位置検出システムにより、機械的保持時刻と電気的保持時刻との時刻差異を確実に検出できる実現性のある高信頼性の電気時計の位置検出システムを提供することである。
【0011】
【課題を解決するための手段】
この課題を解決するために本発明は、回転体の角度回転位置の検出機構を有する電気時計の位置検出システムにおいて、複数の送信信号を出力する送信回路と、前記複数の送信信号を変調して伝達する信号伝達機構と、該信号伝達機構を経由した信号を入力して前記回転体の機械的回転位置を検出する位置検出回路を有し、前記信号伝達機構は、導電性の回転軸および回転電極を有する検出車と、該検出車の回転軸に圧接配置した信号伝達バネと、前記検出車の回転電極に非接触に近接して対向配置した固定電極とから成ることを特徴とする。
【0012】
この構成によれば、検出車に設けた前記回転電極と前記固定電極との電極間の距離を、必要最低限まで近接させる事が出来るので、伝達信号の振幅を拡大する事ができる。その結果、伝達信号とノイズ信号との識別が容易になり誤検出を抑制できるので、検出能力を飛躍的に向上させる事ができる。このように伝達能力を高める事ができるので、大きなエネルギーを必要とせず、経時変化のない、高頼性の位置検出システムを構成することができる。また、検出車と該検出車に対抗した電極を配置するだけの構成のため、電気時計のムーブメントの薄型化を容易に実現できる。このように電気時計のムーブメント構成が簡素であり、信頼性も向上し、また低価格化が可能となる。
【0013】
また、前記信号伝達機構は、2個以上の前記固定電極を有し、該固定電極から前記複数の送信信号を出力し、前記検出車の回転電極で受信して、前記伝達バネを経由して前記位置検出回路に伝達する構成としたことを特徴とする。
【0014】
この構成によれば、回転運動を行う前記検出車にはただ1つの回転電極を用意するだけで良い為、信号伝達バネの構造も単純となり信号伝達構造をより簡単に構成できる。従って構成部品の構造が簡単となり、高い信頼性の回転位置検出システムを低価格で実現できる。
【0015】
また、前記信号伝達機構は、2個以上の前記回転電極を有する検出車と2個以上の前記伝達バネを有し、前記回転電極から前記複数の送信信号を出力し、前記固定電極で受信して前記位置検出回路に伝達する構成としたことを特徴とする。
【0016】
この構成によれば、前記固定電極のすぐ近くに前記位置検出回路を配置が可能となり、前記固定電極に受信した信号を極力短い伝達経路で前記位置検出回路に入力することが可能となる。このノイズの受けやすい受信信号の伝達経路を短くすることにより、ノイズの影響を受けにくい、高い信頼性の回転位置検出システムを実現する事が出来る。
【0017】
【発明の実施の形態】
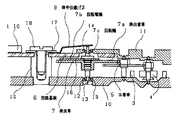
図1は第1の実施の形態を示す要部断面図であり、図2は要部平面図である。図1及び図2に基づいて第1の実施の形態を詳述する。図2において1は時計の動作全体の制御を行なうICであり、回路基板6に実装されている。IC1は複数の送信信号を出力する送信回路、および受信信号を入力して回転体の位置を検出する位置検出回路を有している。2は完成コイル、3はステータ、4はロータである。5はロータ4と連結する五番車、9は五番車5と連結して秒針により秒の時刻情報を表示する四番車、7は同じく五番車5と連結して秒針の針位置を検出する検出車であり、四番車9と同じ減速比で回転する。検出車7は導電性を有する金属製の回転軸7cに、非導電性のプラスチック製の検出歯車7aと導電性を有する扇形状の回転電極7bとを固定した構造をしている。
【0018】
検出歯車7aの上面側には回路基板6を配置し、信号を送信する固定電極であるA電極6a及びB電極6bを形成している。8は検出車7が受信した検出信号を回路基板6のC電極6cへ伝達する信号伝達バネである。検出車7の回転電極7b、回路基板6のA電極6a及びB電極6b、及び信号伝達バネ8によって、信号伝達機構を構成している。
【0019】
続いて図1により第1の実施の形態の断面構造を説明する。ロータ4、五番車5は地板10と輪列受11で上下のホゾを軸支している。検出車7の下ホゾ側は地板10に固定された非導電性の下穴石12によって平面位置を軸支されるとともに、非導電性の下受石13によって断面方向のアガキが規制され、上ホゾ側は輪列受11に固定された非導電性の上穴石14によって軸支されている。このように、検出車7の上下ホゾを非導電性の穴石で軸支し、また検出歯車7aも非導電性のプラスチック材で成形することにより、検出車7を他の構成部材と電気的に絶縁している。
【0020】
回転軸7cは、その上ホゾ上端を金属薄板の信号伝達バネ8で圧接して電気的導通をとることにより、検出車7の回転電極7bで受信した信号を回路基板6へ伝達している。検出車7は信号伝達バネ8によって下ホゾ側に加圧されるが、下受石13で回転軸7cの先端を受けるため、胴付部端面と下穴石12との間には隙19があり、回転トルクに対する負荷を低減する事が出来る。腕時計の輪列は微弱な駆動トルクで回転しているので、輪列に接触して負荷を与える構造は好ましくないが、本実施の形態の如く、検出車7の上端側は信号伝達バネ8で、下端側は下受石13で、それぞれ回転軸7cのほぼ中心で支持しているため、負荷トルクを微小に抑える事が可能である。また、信号伝達バネ8で検出車7に微小の負荷を与える事により、歯車伝達機構では必ず発生するバックラッシによるガタを抑制する事が出来るので、回転位置の検出能力を向上させる事ができる。なお、本実施の形態では秒針を取り付ける四番車9と検出車7を別部品として構成したが、検出車7に直接秒針を取り付ける構造も可能である。その場合、信号伝達バネ8の微小負荷によって、歯車のバックラッシによって発生する秒針の運針ムラを抑制する事も可能である。
【0021】
回路基板6は地板10に固定された支柱15で保持されて回転電極7bと僅かな隙16を持って配置されている。回路基板6の回転電極7bと対向する位置には、2つの送信電極であるA電極6a、B電極6bがパターン成形されている。隙16は信号伝達を確実にして検出車7の回転位置の検出能力を向上させる為には出来るだけ小さく設定した方が有利であるが、検出車7のアガキ量の確保や、各種部品の寸法バラツキ等を考慮して、約100μm〜200μm程度に設定するのが望ましい。回路基板6の上面側に信号伝達バネ8と絶縁シート17を積層配置し、ネジ18によって支柱15に締結固定されている。
【0022】
次に第1の実施の形態の動作について説明する。本実施の形態では、時分秒の時刻情報を三針表示する時計とし、秒針を一つのモータで駆動し、以下説明を省略するが分針と時針は別のモータで駆動する構造とする。また付加機能を有した時計に応用した場合は、秒針は秒表示を行なうだけでなく、日月うるう年等のカレンダー情報を切替表示したり、ストップウオッチやタイマー針等に切替使用する事も出来る。
【0023】
IC1から出力する変換機駆動信号によりロータ4を回転させ、その回転を五番車5を経由して四番車9及び検出車7に伝達する。その後、IC1の送信回路から回路基板6のA電極6aおよびB電極6bに位相の異なる2つの正弦波信号を出力する。回路基板6のA電極6aおよびB電極6bから出力された信号を、近接配置された検出車7の回転電極7bで受信する。検出車7の回転電極7bで受信した検出信号は、回路基板6のA電極6aおよびB電極6bに対する回転電極7bの位置によって振幅や位相が変化する。検出車7の回転電極7bに伝達された検出信号は、検出車7の回転軸7cを介してバネ性を有して弾性接触している信号伝達バネ8に伝達され、更にネジ18の締結により回路基板6のC電極6cを経由してIC1へ入力される。IC1へ入力した検出信号は、位置検出回路によって検波され、検出車7の回転位置を検出する。検出車7の回転位置を検出する事により、五番車5から同じ減速比で構成された四番車9の回転位置を検出する事ができ、よって四番車9に取り付けられた秒針の回転位置を検出する事ができる。
【0024】
図3は、本発明の第1の実施の形態の電気的構成を示すブロック図である。図3において発振分周回路20は、各種の制御信号(図示せず)や駆動信号(図示せず)を出力すると共に、位相が45度進んだ出力パルスPa(+45°)と位相が45度遅れた出力パルスPb(−45°)を出力する(以後Pa(+45°)はPa、Pb(−45°)はPbと略記する)。送信回路23のBPF増幅回路21は出力パルスPaを入力して送信信号φaを出力し、送信回路23のBPF増幅回路22は出力パルスPbを入力して送信信号φbを出力する。
【0025】
送信信号φaはA電極6aとコンデンサ25に入力し、送信信号φbはB電極6bとコンデンサ26に入力する。回転電極7bは信号伝達バネ8を介して受信信号φcを伝達し、受信回路24は受信信号φc入力して受信パルス信号Pcを出力する。基準信号発生回路28は二つのコンデンサ25、26を介して二つの送信信号φa、φbを合成した合成信号φabを増幅回路27に入力し、位相の進み遅れのない基準信号Pab(0°)を出力する(以降Pab(0°)はPabと略記する)。位置検出回路30は受信パルス信号Pcと基準信号Pabを入力して位置信号Pdを出力する。
【0026】
次に図3に於ける位置検出システムの電気的な動作を説明する。発振分周回路20は内部の水晶発振回路(図示せず)とロジック回路(図示せず)により、π/2位相ずれた2つの出力パルスPaとPbとを出力する。送信回路23の二つのBPF増幅回路21、22は、それぞれ出力パルスPa、Pbを入力し、高調波成分を除去して基本波成分のみを増幅して、正弦波であって位相がπ/2ずれた二つの送信信号φa、φbを生成する。
【0027】
生成された二つの送信信号φa、φbは、それぞれA電極6a、B電極6bから送信さる。尚、A電極6a、B電極6bは、きわめて小さな静電容量を有する高インピーダンスの負荷であるので、送信回路23の消費電力は非常に少ない。ここで、前述した如く検出車7はロータ4の回転を伝達して回転するので、検出車7の回転に応じて回転電極7bとA電極6a及びB電極6bの電気的容量結合が変化し、この結果、回転電極7bには検出車7の回転に応じて変調された伝達信号が誘起される。
【0028】
次に基準信号Pabを生成する基準信号発生回路28の動作を説明する。基準信号発生回路28の二つのコンデンサ25、26は位相が45°進んだ送信信号φaと位相が45°遅れた送信信号φbを入力し、合成信号φabを生成するが、コンデンサ25と26の容量値が等しいので、合成信号φabの位相は、二つの送信信号φaとφbの位相の中間点である位相角零度の正弦波となる。増幅回路27は合成信号φabを飽和増幅して位相角零度のパルス信号である基準信号Pabを生成する。
【0029】
次に図3に於ける位置検出回路30の動作を説明する。位置検出回路30は、一実施例としてデータ入力型フリップフロップ30a(以降D−FFと略記する)によって構成し、受信パルス信号Pcをデータ入力端子Dに入力し、基準信号Pabをクロック端子CLに入力する。また、D−FF30aの出力端子Qから位置信号Pdを出力する。
【0030】
ここで、D−FF30aのデータ入力端子Dに入力される受信パルス信号Pcがクロック端子CLに入力される基準信号Pabより位相が進んでいる場合は、その出力端子Qの論理レベルは論理“H”となり、データ入力端子Dに入力される受信パルス信号Pcがクロック端子CLに入力される基準信号Pabより位相が遅れている場合は、その出力端子Qの論理レベルは論理“L”となる。この結果、位置信号Pdの論理レベルにより、基準信号Pabに対する受信パルス信号Pcの位相の進み遅れを知ることが出来る。
【0031】
図4は、本発明の第1の実施の形態である送信信号と受信信号の位相関係を示すグラフであり、検出車7の回転電極7bと、複数の送信電極である回路基板6のA電極6aおよびB電極6bの位置関係の変化による送信信号φa、φbと受信信号φcの位相の変化を示している。回路基板6のA電極6aからは位相が45度進んだ正弦波信号φa、回路基板6のB電極6bからは位相が45度遅れた正弦波信号φbを出力する。
【0032】
図4(a)は検出車7の回転電極7bが回路基板6のA電極6aと平面的に重なる位置に来た時の信号波形を示し、A電極6aから回転電極7bへ正弦波の電圧変動が微小な静電容量の変化として信号が伝達される。つまり回転電極7bには、信号φaと位相の等しい、つまり位相が45度進んだ信号φcが伝達される。図4(b)は検出車7の回転が進み、検出車7の回転電極7bが回路基板6のA電極6aとB電極6bの両電極の中間位置に来た時の信号波形を示し、回転電極7bへ二つの正弦波信号が合成された波形、つまり位相が0度の信号φcが伝達される。図4(c)はさらに検出車7の回転が進み、検出車7の回転電極7bが回路基板6のB電極6bと重なる位置に来た時の信号波形を示し、回転電極7bには信号φbと位相の等しい、つまり位相が45度遅れた信号φcが伝達される。以上のように、検出車7の回転電極7bへ伝達される信号φcの波形は、検出車7の回転が進むにつれ、位相が45度進んだ状態から45度遅れた状態まで除々に位相が変化していく。この受信信号の位相変化を検出することによって、検出車7の回転位置を検出する事が出来る。
【0033】
以上説明してきたように、第1の実施の形態の構成によれば、図1に示すように回路基板6のA電極6aおよびB電極6bと検出車7の回転電極7bとの電極間の距離を微小に設定する事ができる。時計ムーブメントの構成部品の大きさは非常に小さいため、各電極の面積は僅かな大きさしか設定できない。そのため電極間の距離を出来るだけ小さくする事によって電極間の静電容量を大きくし、信号の伝達能力を向上させる事は重要なポイントとなる。本発明によれば回路基板6と検出車7の回転電極7bの隙は、接触しないだけの量を確保すれば良いので、約100μm〜200μm程度まで隙を小さくすることができる。また第1の実施の形態によれば、送信電極を構成した回路基板6を、検出車7の上方向に1枚だけ配置するだけて良く、ムーブメントの薄型化を容易に実現できる。
【0034】
また、第1の実施の形態では変換機駆動信号を出力して検出車7を駆動する度に毎秒針位置検出を行なっているが、秒針位置検出を正秒の前後5秒だけで行なったり、10分に1回や1時間に1回の頻度といったように間欠駆動することによって検出回数を減らせば、本発明の位置検出システムの消費電力をより低減できる。
【0035】
また、針位置検出の誤検出による影響を防止するために、検出車7の検出基準位置と電気的保持時刻のズレを1回検出した時にすぐに針位置の補正を行なわず、例えば続けて3回ズレを検出した時に初めて補正を行うようにすれば、本発明の位置検出システムの消費電力をさらに低減できる。
なお、第1の実施の形態における検出車7は、他のムーブメント構成部品と電気的に絶縁するために、プラスチック製の検出歯車7aと金属製の回転電極7bとを別部品として構成していたが、もちろん回転電極7bと検出歯車7aとを一体化する構造でも実現可能である。
【0036】
図5は第2の実施の形態を示す斜視図である。図5において、検出車47は金属製の回転軸47aと金属製の検出歯車47bから構成されている。検出歯車47bはその一部分に穴部47cを有している。検出歯車47bは金属製のため、五番車45と電気的導通を防止するため、五番車45はプラスチックで一体成形されている。46a,46bは回路基板46に配線されたA電極、B電極であり、検出歯車47bと断面的に僅かな隙をもって対向配置している。なお、その他の構成要素は第1の実施の形態と同様であり、その他の構成要素の記載は省略した。
【0037】
次に第2の実施の形態の回転位置検出の動作の説明を行なう。ICで整形された基準の正弦波信号に対し、回路基板46のA電極46aからは45度位相が進んだ信号を、回路基板46のB電極46bからは45度位相が遅れた信号を出力する。検出車47が図5に示す位置にある場合、検出歯車47bは回路基板46のA電極46aとB電極46bのいずれとも対面しているので、両方の信号を合成した波形つまり位相が0度の信号を受信する。その後検出車47が矢印の方向に回転して、検出車47の穴部47cが回路基板46のB電極46bの位置に重なると、B電極46bからの45度位相の遅れた信号は受信せず、45度位相の進んだA電極46aの信号だけを受信するため、検出歯車47bの受信信号は45度位相が進む。さらに検出車47が回転して検出車47の穴部47cが回路基板46のA電極46aの位置に来るとA電極46aからの45度位相の進んだ信号は受信せず、45度位相の遅れたB電極47bの信号だけを受信するため、検出歯車47bの受信信号は45度位相が遅れる。第1の実施の形態と同様に検出歯車47bの受信信号を、図示していないが回転軸47aの上端に圧接した信号伝達バネを経由してICの位置検出回路に伝達し、受信信号の位相変化を検波して検出車47の回転位置を検出する。
【0038】
以上のように第2の実施の形態の構成にすれば、検出車47の構造を簡素化する事ができる。つまり第1の実施の形態では、検出歯車7a、回転電極7b、回転軸7cの三個の子部品から構成されたが、第2の実施の形態では、検出歯車47b、回転軸47aの二個の子部品から構成されるので、子部品の単価、組み立てコスト等が低減できる。また、第2の実施の形態では第1の実施の形態の様に回転電極7bと検出歯車7aを2枚重ね合わせる必要がなく、ムーブメントの薄型化が容易に実現できる。但し、第2の実施の形態では、検出歯車47bの全体が受信電極の役割をするためにノイズの影響を若干うけやすくなってしまうので、ノイズ対策を充分に行なう必要がある。
【0039】
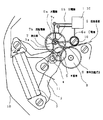
前述の第1及び第2の実施の形態では、固定電極から送信した送信信号を、検出車の回転電極で受信し、信号伝達バネを介して回路基板に実装されたICまで伝達する構成なので、受信信号の伝達径路が比較的長くなってしまい、ノイズ信号等の影響を受けやすくなってしまう。第3の実施の形態はノイズの影響を受けにくくした構造であり、図6を用いて説明する。図6は第3の実施の形態を示す要部断面図である。
【0040】
図6において、57は検出車であり、プラスチック製の検出歯車57a、金属製の上回転電極57c、金属製の下回転電極57e、金属製の上軸57b、及び金属製の下軸57dから構成され、地板51の非導電性の穴石56と輪列受52の非導電性の穴石73で保持されている。上回転電極57cは上軸57bに固定されて電気的に導通をとり、下回転電極57eは下軸57dに固定されて電気的導通をとり、それぞれは非導電性の検出歯車57aによって固定され互いに絶縁している。また下回転電極57eは屈折して検出歯車57aの穴を抜け、上回転電極57cと断面高さが等しい位置に配置している。上軸57bの軸端は上信号伝達バネ53と接し、下軸57dの軸端は下信号伝達バネ54と接している。又、上信号伝達バネ53と下信号伝達バネ54の他端はそれぞれ回路基板55のA電極55a、B電極55bと接し、絶縁シート58,59を介して支柱71とネジ72によって締結されている。つまり検出車57の回転電極57cは回路基板55のA電極55aと、検出車57の回転電極57eは回路基板55のB電極55bと電気的に導通している。また、回路基板55には検出車57の回転電極57cの上方に僅かな隙をあけて配設されたC電極55cが形成されている。
【0041】
次に第3の実施の形態の作動を説明する。図6には図示していないが前述の第1の実施の形態と同様に、ロータの回転を五番車を介して検出車57まで減速伝達する。検出車57が回転する度にA電極55aからは基準信号に対して45°位相の進んだ正弦波を出力し、B電極55bからは基準信号に対して45°位相の遅れた正弦波を出力する。回路基板55のA電極55aから出力された波形は上信号伝達バネ53を介して上回転電極57cに伝達し、同様に回路基板55のB電極55bから出力された波形は下信号伝達バネ54を介して下回転電極57eに伝達する。
【0042】
図6に示す様に回路基板55のC電極55c付近に検出車57の上回転電極57cがある時は、回路基板55のA電極55aからの出力波形が上回転電極57cを介してC電極55cに伝達される。検出車57が回転して下回転電極57eがC電極55c付近にきた時は、B電極55bからの出力信号が下回転電極57eを介してC電極55cに伝達される。回路基板55のC電極55cへ伝達した信号波形は、図示していないが回路基板55に実装されたICに入力し、その信号を基準信号と比較して位相が進んだ状態から遅れた状態へ変化したタイミングを検出して検出車57の回転基準位置を検出する。
【0043】
以上の構成ように第3の実施の形態によれば、C電極55cで受信した信号は前述の第1及び第2の実施の形態のように信号伝達バネを介する事なくそのままICへ入力するのでノイズ信号の影響を受けにくくできる。C電極55cで受信する信号は、極めて小さいサイズの上回転電極57c及び下回転電極57eの容量変化を利用して伝達されるために、信号波形の振幅は微小である。その為、受信した信号の電気的径路を出来る限り短くしてノイズの影響を受けにくくする構造は、検出能力の向上に効果が大きい。
【0044】
【発明の効果】
以上のように本発明によれば、固定電極と検出車の回転電極との電極間の距離を必要最低限まで近接させる事が出来るので、伝達信号の振幅を拡大可能とし、ノイズ信号による誤検出を抑制した高い信頼性のある、経時変化がなく、大きなエネルギーを必要としない位置検出システムを構成することができる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態を示す要部断面図である。
【図2】本発明の第1の実施の形態を示す要部平面図である。
【図3】本発明の第1の実施の形態の電気的構成を示すブロック図である。
【図4】本発明の第1の実施の形態である送信信号と受信信号の位相関係を示すグラフであり、図4(a)は受信信号がプラス45度の時の位相関係を示し、図4(b)は受信信号が0度の時の位相関係を示し、図4(c)は受信信号がマイナス45度の時の位相関係を示す。
【図5】本発明の第2の実施の形態を示す斜視図である。
【図6】本発明の第3の実施の形態を示す要部断面図である。
【符号の説明】
1 IC
7 検出車
6 回路基板
6a A電極
6b B電極
6c C電極
7a 検出歯車
7b 回転電極
7c 回転軸
8 信号伝達バネ
9 四番車
16 回路基板
46 回路基板
47 検出車
47b 検出歯車
55 回路基板
57 検出車
53 上信号伝達バネ
54 下信号伝達バネ
【発明の属する技術分野】
本発明は水晶発振回路を基準信号源として時刻やカレンダ情報を機械的に表示する電気時計において、輪列等の回転角度や回転位置を電場検出により検出し、機械的な誤動作を防止して正確な時刻情報を表示する電気時計の位置検出システムの構成に関するものである。
【0002】
【従来の技術】
従来、電気時計の低電力化技術が確立され、電気時計の電力源としては、小型の1次電池が使用されている。しかしながら、1次電池は使い捨て電池であり、その電池交換の煩わしさもさることながら、1次電池の使い捨てによる地球環境汚染が将来的にますます問題になると予測される。このような背景から、1次電池に替わるものとして、太陽電池によるソーラー発電、大気中の温度と腕の温度差を利用した熱電発電、回転錘による機械的発電等のエネルギー源からの発電エネルギーを2次電池等に充電して使用する発電式電気時計が実用化されている。
【0003】
しかるに、上記発電式電気時計は、地球環境に優しいという利点はあるものの、採取できるエネルギーに余裕がなく、2次電池に充電される充電エネルギーの欠乏は時刻保持に対する信頼性を損なうという潜在的な問題があった。特に機械式のアナログ腕時計においては、エネルギー消費をできるだけ少なくするために最小限の駆動トルクで輪列機構を駆動している。このため指針の形状が大きいと衝撃や外乱等を受けて指針の時刻表示にズレを生じる恐れがあり、これを防止するために指針の形状や大きさに一定の制限があった。
【0004】
さらに、機械的な指針で時刻を表示する機械式電気時計のカレンダ表示機構において、日付表示部の月末処理を、ほぼ2ヶ月毎に手動で日付修正する必要があるため、非常に煩わしく使い難いという問題があった。複雑な機構を用いれば月末自動修正機能の追加は可能であるが、このような機能は機構が複雑なため組み立てコストが高くなり、また、長期間の安定動作に対する信頼性も低下する。更に消費電力が増加するため、充電エネルギーで無停止動作させることが困難であった。これを防止するために、日付部のみ電気光学的な液晶表示にすると、時刻表示面にデザイン上の違和感が生じてしまう。
【0005】
上記の欠点を解決するためには、指針式表示やカレンダ表示の機械的角度や回転位置を検出する機能が必要である。従来提案されている技術としては、(1)回転する輪列の一部に機械的スイッチを設けている(例えば、特許文献1参照。)。また、(2)発光素子と受光素子とを穴を有する回転輪列を挟んで配置して回転時の穴の有無を受光素子によって検出するものがある(例えば、特許文献2参照。)。さらに、(3)回転部材を利用して電極間の容量変化を電子検出手段で読み取る容量値検出によるものもある(例えば、特許文献3参照。)。
【0006】
【特許文献1】
特開昭57−67877号公報(第2頁、図2)
【特許文献2】
特開平8−179058号公報(特許請求の範囲、図1)
【特許文献3】
特表2001−524206号公報(特許請求の範囲、図1)
【0007】
【発明が解決しようとする課題】
しかしながら、今までに提案されている位置検出機構にはそれぞれ多くの課題を有していた。上記(1)の機械的接触スイッチ機構を利用する位置検出は、輪列等の回転運動部材に接触して位置を検出する構造のため、駆動エネルギーを多く必要とするという課題がある。特に発電エネルギーに余裕の少ない発電式電気時計には大きな問題であり、位置検出を行なうためにかえって位置ズレ発生の原因にもなりかねず、また、接触式のスイッチ機構は接触部材の磨耗劣化の恐れがあり、信頼性が低いという課題があった。
【0008】
また、上記(2)の光学的センサを利用した構造においては、発光素子と受光素子を回転運動する部材の上下面に配置する必要があるので、時計の厚みが増加してしまうという課題があり、このため、薄型の腕時計への適応は不可能であった。また発光素子や受光素子等の光学素子を動作させるためにはかなりの消費電力が必要になり、そのため一日に1回程度の検出頻度しか応用できない。また発光のためには一定値以上の高い閾値電圧の駆動電圧が必要なため高電圧制約があり、電源電圧の変動の大きい発電式電気時計には適応しづらいという課題もあった。
【0009】
さらに、上記(3)の回転部材を利用して電極間の容量変化を直接検出する構成については、腕時計サイズのごく小さな位置検出部品から検出される容量値の変化は微小であるために検出精度が低く、構成部品の携帯姿勢による位置変化や温度変化等の外部環境からの影響を受けやすく、位置検出の信頼性が極めて低いという課題があった。
【0010】
本発明の目的は、上記課題を解決して、大きなエネルギーを必要とせず、接点式検出機構の経時変化による信頼性の低下を防止し、また、光学的センサ方式と比較して薄型構造を実現し、且つ発光素子を駆動するための高電圧を必要とせず、さらに、静電容量値や磁力の絶対量の変化の検出方式と比較して温度等外部環境からの影響を受けない、高い信頼性の位置検出システムにより、機械的保持時刻と電気的保持時刻との時刻差異を確実に検出できる実現性のある高信頼性の電気時計の位置検出システムを提供することである。
【0011】
【課題を解決するための手段】
この課題を解決するために本発明は、回転体の角度回転位置の検出機構を有する電気時計の位置検出システムにおいて、複数の送信信号を出力する送信回路と、前記複数の送信信号を変調して伝達する信号伝達機構と、該信号伝達機構を経由した信号を入力して前記回転体の機械的回転位置を検出する位置検出回路を有し、前記信号伝達機構は、導電性の回転軸および回転電極を有する検出車と、該検出車の回転軸に圧接配置した信号伝達バネと、前記検出車の回転電極に非接触に近接して対向配置した固定電極とから成ることを特徴とする。
【0012】
この構成によれば、検出車に設けた前記回転電極と前記固定電極との電極間の距離を、必要最低限まで近接させる事が出来るので、伝達信号の振幅を拡大する事ができる。その結果、伝達信号とノイズ信号との識別が容易になり誤検出を抑制できるので、検出能力を飛躍的に向上させる事ができる。このように伝達能力を高める事ができるので、大きなエネルギーを必要とせず、経時変化のない、高頼性の位置検出システムを構成することができる。また、検出車と該検出車に対抗した電極を配置するだけの構成のため、電気時計のムーブメントの薄型化を容易に実現できる。このように電気時計のムーブメント構成が簡素であり、信頼性も向上し、また低価格化が可能となる。
【0013】
また、前記信号伝達機構は、2個以上の前記固定電極を有し、該固定電極から前記複数の送信信号を出力し、前記検出車の回転電極で受信して、前記伝達バネを経由して前記位置検出回路に伝達する構成としたことを特徴とする。
【0014】
この構成によれば、回転運動を行う前記検出車にはただ1つの回転電極を用意するだけで良い為、信号伝達バネの構造も単純となり信号伝達構造をより簡単に構成できる。従って構成部品の構造が簡単となり、高い信頼性の回転位置検出システムを低価格で実現できる。
【0015】
また、前記信号伝達機構は、2個以上の前記回転電極を有する検出車と2個以上の前記伝達バネを有し、前記回転電極から前記複数の送信信号を出力し、前記固定電極で受信して前記位置検出回路に伝達する構成としたことを特徴とする。
【0016】
この構成によれば、前記固定電極のすぐ近くに前記位置検出回路を配置が可能となり、前記固定電極に受信した信号を極力短い伝達経路で前記位置検出回路に入力することが可能となる。このノイズの受けやすい受信信号の伝達経路を短くすることにより、ノイズの影響を受けにくい、高い信頼性の回転位置検出システムを実現する事が出来る。
【0017】
【発明の実施の形態】
図1は第1の実施の形態を示す要部断面図であり、図2は要部平面図である。図1及び図2に基づいて第1の実施の形態を詳述する。図2において1は時計の動作全体の制御を行なうICであり、回路基板6に実装されている。IC1は複数の送信信号を出力する送信回路、および受信信号を入力して回転体の位置を検出する位置検出回路を有している。2は完成コイル、3はステータ、4はロータである。5はロータ4と連結する五番車、9は五番車5と連結して秒針により秒の時刻情報を表示する四番車、7は同じく五番車5と連結して秒針の針位置を検出する検出車であり、四番車9と同じ減速比で回転する。検出車7は導電性を有する金属製の回転軸7cに、非導電性のプラスチック製の検出歯車7aと導電性を有する扇形状の回転電極7bとを固定した構造をしている。
【0018】
検出歯車7aの上面側には回路基板6を配置し、信号を送信する固定電極であるA電極6a及びB電極6bを形成している。8は検出車7が受信した検出信号を回路基板6のC電極6cへ伝達する信号伝達バネである。検出車7の回転電極7b、回路基板6のA電極6a及びB電極6b、及び信号伝達バネ8によって、信号伝達機構を構成している。
【0019】
続いて図1により第1の実施の形態の断面構造を説明する。ロータ4、五番車5は地板10と輪列受11で上下のホゾを軸支している。検出車7の下ホゾ側は地板10に固定された非導電性の下穴石12によって平面位置を軸支されるとともに、非導電性の下受石13によって断面方向のアガキが規制され、上ホゾ側は輪列受11に固定された非導電性の上穴石14によって軸支されている。このように、検出車7の上下ホゾを非導電性の穴石で軸支し、また検出歯車7aも非導電性のプラスチック材で成形することにより、検出車7を他の構成部材と電気的に絶縁している。
【0020】
回転軸7cは、その上ホゾ上端を金属薄板の信号伝達バネ8で圧接して電気的導通をとることにより、検出車7の回転電極7bで受信した信号を回路基板6へ伝達している。検出車7は信号伝達バネ8によって下ホゾ側に加圧されるが、下受石13で回転軸7cの先端を受けるため、胴付部端面と下穴石12との間には隙19があり、回転トルクに対する負荷を低減する事が出来る。腕時計の輪列は微弱な駆動トルクで回転しているので、輪列に接触して負荷を与える構造は好ましくないが、本実施の形態の如く、検出車7の上端側は信号伝達バネ8で、下端側は下受石13で、それぞれ回転軸7cのほぼ中心で支持しているため、負荷トルクを微小に抑える事が可能である。また、信号伝達バネ8で検出車7に微小の負荷を与える事により、歯車伝達機構では必ず発生するバックラッシによるガタを抑制する事が出来るので、回転位置の検出能力を向上させる事ができる。なお、本実施の形態では秒針を取り付ける四番車9と検出車7を別部品として構成したが、検出車7に直接秒針を取り付ける構造も可能である。その場合、信号伝達バネ8の微小負荷によって、歯車のバックラッシによって発生する秒針の運針ムラを抑制する事も可能である。
【0021】
回路基板6は地板10に固定された支柱15で保持されて回転電極7bと僅かな隙16を持って配置されている。回路基板6の回転電極7bと対向する位置には、2つの送信電極であるA電極6a、B電極6bがパターン成形されている。隙16は信号伝達を確実にして検出車7の回転位置の検出能力を向上させる為には出来るだけ小さく設定した方が有利であるが、検出車7のアガキ量の確保や、各種部品の寸法バラツキ等を考慮して、約100μm〜200μm程度に設定するのが望ましい。回路基板6の上面側に信号伝達バネ8と絶縁シート17を積層配置し、ネジ18によって支柱15に締結固定されている。
【0022】
次に第1の実施の形態の動作について説明する。本実施の形態では、時分秒の時刻情報を三針表示する時計とし、秒針を一つのモータで駆動し、以下説明を省略するが分針と時針は別のモータで駆動する構造とする。また付加機能を有した時計に応用した場合は、秒針は秒表示を行なうだけでなく、日月うるう年等のカレンダー情報を切替表示したり、ストップウオッチやタイマー針等に切替使用する事も出来る。
【0023】
IC1から出力する変換機駆動信号によりロータ4を回転させ、その回転を五番車5を経由して四番車9及び検出車7に伝達する。その後、IC1の送信回路から回路基板6のA電極6aおよびB電極6bに位相の異なる2つの正弦波信号を出力する。回路基板6のA電極6aおよびB電極6bから出力された信号を、近接配置された検出車7の回転電極7bで受信する。検出車7の回転電極7bで受信した検出信号は、回路基板6のA電極6aおよびB電極6bに対する回転電極7bの位置によって振幅や位相が変化する。検出車7の回転電極7bに伝達された検出信号は、検出車7の回転軸7cを介してバネ性を有して弾性接触している信号伝達バネ8に伝達され、更にネジ18の締結により回路基板6のC電極6cを経由してIC1へ入力される。IC1へ入力した検出信号は、位置検出回路によって検波され、検出車7の回転位置を検出する。検出車7の回転位置を検出する事により、五番車5から同じ減速比で構成された四番車9の回転位置を検出する事ができ、よって四番車9に取り付けられた秒針の回転位置を検出する事ができる。
【0024】
図3は、本発明の第1の実施の形態の電気的構成を示すブロック図である。図3において発振分周回路20は、各種の制御信号(図示せず)や駆動信号(図示せず)を出力すると共に、位相が45度進んだ出力パルスPa(+45°)と位相が45度遅れた出力パルスPb(−45°)を出力する(以後Pa(+45°)はPa、Pb(−45°)はPbと略記する)。送信回路23のBPF増幅回路21は出力パルスPaを入力して送信信号φaを出力し、送信回路23のBPF増幅回路22は出力パルスPbを入力して送信信号φbを出力する。
【0025】
送信信号φaはA電極6aとコンデンサ25に入力し、送信信号φbはB電極6bとコンデンサ26に入力する。回転電極7bは信号伝達バネ8を介して受信信号φcを伝達し、受信回路24は受信信号φc入力して受信パルス信号Pcを出力する。基準信号発生回路28は二つのコンデンサ25、26を介して二つの送信信号φa、φbを合成した合成信号φabを増幅回路27に入力し、位相の進み遅れのない基準信号Pab(0°)を出力する(以降Pab(0°)はPabと略記する)。位置検出回路30は受信パルス信号Pcと基準信号Pabを入力して位置信号Pdを出力する。
【0026】
次に図3に於ける位置検出システムの電気的な動作を説明する。発振分周回路20は内部の水晶発振回路(図示せず)とロジック回路(図示せず)により、π/2位相ずれた2つの出力パルスPaとPbとを出力する。送信回路23の二つのBPF増幅回路21、22は、それぞれ出力パルスPa、Pbを入力し、高調波成分を除去して基本波成分のみを増幅して、正弦波であって位相がπ/2ずれた二つの送信信号φa、φbを生成する。
【0027】
生成された二つの送信信号φa、φbは、それぞれA電極6a、B電極6bから送信さる。尚、A電極6a、B電極6bは、きわめて小さな静電容量を有する高インピーダンスの負荷であるので、送信回路23の消費電力は非常に少ない。ここで、前述した如く検出車7はロータ4の回転を伝達して回転するので、検出車7の回転に応じて回転電極7bとA電極6a及びB電極6bの電気的容量結合が変化し、この結果、回転電極7bには検出車7の回転に応じて変調された伝達信号が誘起される。
【0028】
次に基準信号Pabを生成する基準信号発生回路28の動作を説明する。基準信号発生回路28の二つのコンデンサ25、26は位相が45°進んだ送信信号φaと位相が45°遅れた送信信号φbを入力し、合成信号φabを生成するが、コンデンサ25と26の容量値が等しいので、合成信号φabの位相は、二つの送信信号φaとφbの位相の中間点である位相角零度の正弦波となる。増幅回路27は合成信号φabを飽和増幅して位相角零度のパルス信号である基準信号Pabを生成する。
【0029】
次に図3に於ける位置検出回路30の動作を説明する。位置検出回路30は、一実施例としてデータ入力型フリップフロップ30a(以降D−FFと略記する)によって構成し、受信パルス信号Pcをデータ入力端子Dに入力し、基準信号Pabをクロック端子CLに入力する。また、D−FF30aの出力端子Qから位置信号Pdを出力する。
【0030】
ここで、D−FF30aのデータ入力端子Dに入力される受信パルス信号Pcがクロック端子CLに入力される基準信号Pabより位相が進んでいる場合は、その出力端子Qの論理レベルは論理“H”となり、データ入力端子Dに入力される受信パルス信号Pcがクロック端子CLに入力される基準信号Pabより位相が遅れている場合は、その出力端子Qの論理レベルは論理“L”となる。この結果、位置信号Pdの論理レベルにより、基準信号Pabに対する受信パルス信号Pcの位相の進み遅れを知ることが出来る。
【0031】
図4は、本発明の第1の実施の形態である送信信号と受信信号の位相関係を示すグラフであり、検出車7の回転電極7bと、複数の送信電極である回路基板6のA電極6aおよびB電極6bの位置関係の変化による送信信号φa、φbと受信信号φcの位相の変化を示している。回路基板6のA電極6aからは位相が45度進んだ正弦波信号φa、回路基板6のB電極6bからは位相が45度遅れた正弦波信号φbを出力する。
【0032】
図4(a)は検出車7の回転電極7bが回路基板6のA電極6aと平面的に重なる位置に来た時の信号波形を示し、A電極6aから回転電極7bへ正弦波の電圧変動が微小な静電容量の変化として信号が伝達される。つまり回転電極7bには、信号φaと位相の等しい、つまり位相が45度進んだ信号φcが伝達される。図4(b)は検出車7の回転が進み、検出車7の回転電極7bが回路基板6のA電極6aとB電極6bの両電極の中間位置に来た時の信号波形を示し、回転電極7bへ二つの正弦波信号が合成された波形、つまり位相が0度の信号φcが伝達される。図4(c)はさらに検出車7の回転が進み、検出車7の回転電極7bが回路基板6のB電極6bと重なる位置に来た時の信号波形を示し、回転電極7bには信号φbと位相の等しい、つまり位相が45度遅れた信号φcが伝達される。以上のように、検出車7の回転電極7bへ伝達される信号φcの波形は、検出車7の回転が進むにつれ、位相が45度進んだ状態から45度遅れた状態まで除々に位相が変化していく。この受信信号の位相変化を検出することによって、検出車7の回転位置を検出する事が出来る。
【0033】
以上説明してきたように、第1の実施の形態の構成によれば、図1に示すように回路基板6のA電極6aおよびB電極6bと検出車7の回転電極7bとの電極間の距離を微小に設定する事ができる。時計ムーブメントの構成部品の大きさは非常に小さいため、各電極の面積は僅かな大きさしか設定できない。そのため電極間の距離を出来るだけ小さくする事によって電極間の静電容量を大きくし、信号の伝達能力を向上させる事は重要なポイントとなる。本発明によれば回路基板6と検出車7の回転電極7bの隙は、接触しないだけの量を確保すれば良いので、約100μm〜200μm程度まで隙を小さくすることができる。また第1の実施の形態によれば、送信電極を構成した回路基板6を、検出車7の上方向に1枚だけ配置するだけて良く、ムーブメントの薄型化を容易に実現できる。
【0034】
また、第1の実施の形態では変換機駆動信号を出力して検出車7を駆動する度に毎秒針位置検出を行なっているが、秒針位置検出を正秒の前後5秒だけで行なったり、10分に1回や1時間に1回の頻度といったように間欠駆動することによって検出回数を減らせば、本発明の位置検出システムの消費電力をより低減できる。
【0035】
また、針位置検出の誤検出による影響を防止するために、検出車7の検出基準位置と電気的保持時刻のズレを1回検出した時にすぐに針位置の補正を行なわず、例えば続けて3回ズレを検出した時に初めて補正を行うようにすれば、本発明の位置検出システムの消費電力をさらに低減できる。
なお、第1の実施の形態における検出車7は、他のムーブメント構成部品と電気的に絶縁するために、プラスチック製の検出歯車7aと金属製の回転電極7bとを別部品として構成していたが、もちろん回転電極7bと検出歯車7aとを一体化する構造でも実現可能である。
【0036】
図5は第2の実施の形態を示す斜視図である。図5において、検出車47は金属製の回転軸47aと金属製の検出歯車47bから構成されている。検出歯車47bはその一部分に穴部47cを有している。検出歯車47bは金属製のため、五番車45と電気的導通を防止するため、五番車45はプラスチックで一体成形されている。46a,46bは回路基板46に配線されたA電極、B電極であり、検出歯車47bと断面的に僅かな隙をもって対向配置している。なお、その他の構成要素は第1の実施の形態と同様であり、その他の構成要素の記載は省略した。
【0037】
次に第2の実施の形態の回転位置検出の動作の説明を行なう。ICで整形された基準の正弦波信号に対し、回路基板46のA電極46aからは45度位相が進んだ信号を、回路基板46のB電極46bからは45度位相が遅れた信号を出力する。検出車47が図5に示す位置にある場合、検出歯車47bは回路基板46のA電極46aとB電極46bのいずれとも対面しているので、両方の信号を合成した波形つまり位相が0度の信号を受信する。その後検出車47が矢印の方向に回転して、検出車47の穴部47cが回路基板46のB電極46bの位置に重なると、B電極46bからの45度位相の遅れた信号は受信せず、45度位相の進んだA電極46aの信号だけを受信するため、検出歯車47bの受信信号は45度位相が進む。さらに検出車47が回転して検出車47の穴部47cが回路基板46のA電極46aの位置に来るとA電極46aからの45度位相の進んだ信号は受信せず、45度位相の遅れたB電極47bの信号だけを受信するため、検出歯車47bの受信信号は45度位相が遅れる。第1の実施の形態と同様に検出歯車47bの受信信号を、図示していないが回転軸47aの上端に圧接した信号伝達バネを経由してICの位置検出回路に伝達し、受信信号の位相変化を検波して検出車47の回転位置を検出する。
【0038】
以上のように第2の実施の形態の構成にすれば、検出車47の構造を簡素化する事ができる。つまり第1の実施の形態では、検出歯車7a、回転電極7b、回転軸7cの三個の子部品から構成されたが、第2の実施の形態では、検出歯車47b、回転軸47aの二個の子部品から構成されるので、子部品の単価、組み立てコスト等が低減できる。また、第2の実施の形態では第1の実施の形態の様に回転電極7bと検出歯車7aを2枚重ね合わせる必要がなく、ムーブメントの薄型化が容易に実現できる。但し、第2の実施の形態では、検出歯車47bの全体が受信電極の役割をするためにノイズの影響を若干うけやすくなってしまうので、ノイズ対策を充分に行なう必要がある。
【0039】
前述の第1及び第2の実施の形態では、固定電極から送信した送信信号を、検出車の回転電極で受信し、信号伝達バネを介して回路基板に実装されたICまで伝達する構成なので、受信信号の伝達径路が比較的長くなってしまい、ノイズ信号等の影響を受けやすくなってしまう。第3の実施の形態はノイズの影響を受けにくくした構造であり、図6を用いて説明する。図6は第3の実施の形態を示す要部断面図である。
【0040】
図6において、57は検出車であり、プラスチック製の検出歯車57a、金属製の上回転電極57c、金属製の下回転電極57e、金属製の上軸57b、及び金属製の下軸57dから構成され、地板51の非導電性の穴石56と輪列受52の非導電性の穴石73で保持されている。上回転電極57cは上軸57bに固定されて電気的に導通をとり、下回転電極57eは下軸57dに固定されて電気的導通をとり、それぞれは非導電性の検出歯車57aによって固定され互いに絶縁している。また下回転電極57eは屈折して検出歯車57aの穴を抜け、上回転電極57cと断面高さが等しい位置に配置している。上軸57bの軸端は上信号伝達バネ53と接し、下軸57dの軸端は下信号伝達バネ54と接している。又、上信号伝達バネ53と下信号伝達バネ54の他端はそれぞれ回路基板55のA電極55a、B電極55bと接し、絶縁シート58,59を介して支柱71とネジ72によって締結されている。つまり検出車57の回転電極57cは回路基板55のA電極55aと、検出車57の回転電極57eは回路基板55のB電極55bと電気的に導通している。また、回路基板55には検出車57の回転電極57cの上方に僅かな隙をあけて配設されたC電極55cが形成されている。
【0041】
次に第3の実施の形態の作動を説明する。図6には図示していないが前述の第1の実施の形態と同様に、ロータの回転を五番車を介して検出車57まで減速伝達する。検出車57が回転する度にA電極55aからは基準信号に対して45°位相の進んだ正弦波を出力し、B電極55bからは基準信号に対して45°位相の遅れた正弦波を出力する。回路基板55のA電極55aから出力された波形は上信号伝達バネ53を介して上回転電極57cに伝達し、同様に回路基板55のB電極55bから出力された波形は下信号伝達バネ54を介して下回転電極57eに伝達する。
【0042】
図6に示す様に回路基板55のC電極55c付近に検出車57の上回転電極57cがある時は、回路基板55のA電極55aからの出力波形が上回転電極57cを介してC電極55cに伝達される。検出車57が回転して下回転電極57eがC電極55c付近にきた時は、B電極55bからの出力信号が下回転電極57eを介してC電極55cに伝達される。回路基板55のC電極55cへ伝達した信号波形は、図示していないが回路基板55に実装されたICに入力し、その信号を基準信号と比較して位相が進んだ状態から遅れた状態へ変化したタイミングを検出して検出車57の回転基準位置を検出する。
【0043】
以上の構成ように第3の実施の形態によれば、C電極55cで受信した信号は前述の第1及び第2の実施の形態のように信号伝達バネを介する事なくそのままICへ入力するのでノイズ信号の影響を受けにくくできる。C電極55cで受信する信号は、極めて小さいサイズの上回転電極57c及び下回転電極57eの容量変化を利用して伝達されるために、信号波形の振幅は微小である。その為、受信した信号の電気的径路を出来る限り短くしてノイズの影響を受けにくくする構造は、検出能力の向上に効果が大きい。
【0044】
【発明の効果】
以上のように本発明によれば、固定電極と検出車の回転電極との電極間の距離を必要最低限まで近接させる事が出来るので、伝達信号の振幅を拡大可能とし、ノイズ信号による誤検出を抑制した高い信頼性のある、経時変化がなく、大きなエネルギーを必要としない位置検出システムを構成することができる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態を示す要部断面図である。
【図2】本発明の第1の実施の形態を示す要部平面図である。
【図3】本発明の第1の実施の形態の電気的構成を示すブロック図である。
【図4】本発明の第1の実施の形態である送信信号と受信信号の位相関係を示すグラフであり、図4(a)は受信信号がプラス45度の時の位相関係を示し、図4(b)は受信信号が0度の時の位相関係を示し、図4(c)は受信信号がマイナス45度の時の位相関係を示す。
【図5】本発明の第2の実施の形態を示す斜視図である。
【図6】本発明の第3の実施の形態を示す要部断面図である。
【符号の説明】
1 IC
7 検出車
6 回路基板
6a A電極
6b B電極
6c C電極
7a 検出歯車
7b 回転電極
7c 回転軸
8 信号伝達バネ
9 四番車
16 回路基板
46 回路基板
47 検出車
47b 検出歯車
55 回路基板
57 検出車
53 上信号伝達バネ
54 下信号伝達バネ
Claims (3)
- 回転体の角度回転位置の検出機構を有する電気時計の位置検出システムにおいて、複数の送信信号を出力する送信回路と、前記複数の送信信号を変調して伝達する信号伝達機構と、該信号伝達機構を経由した信号を入力して前記回転体の機械的回転位置を検出する位置検出回路を有し、前記信号伝達機構は、導電性の回転軸および回転電極を有する検出車と、該検出車の回転軸に圧接配置した信号伝達バネと、前記検出車の回転電極に非接触に近接して対向配置した固定電極とから成ることを特徴とする電気時計の位置検出システム。
- 前記信号伝達機構は、2個以上の前記固定電極を有し、該固定電極から前記複数の送信信号を出力し、前記検出車の回転電極で受信して、前記伝達バネを経由して前記位置検出回路に伝達する構成としたことを特徴とする請求項1記載の電気時計の位置検出システム。
- 前記信号伝達機構は、2個以上の前記回転電極を有する検出車と2個以上の前記伝達バネを有し、前記回転電極から前記複数の送信信号を出力し、前記固定電極で受信して前記位置検出回路に伝達する構成としたことを特徴とする請求項1記載の電気時計の位置検出システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003020083A JP2004233132A (ja) | 2003-01-29 | 2003-01-29 | 電気時計の位置検出システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003020083A JP2004233132A (ja) | 2003-01-29 | 2003-01-29 | 電気時計の位置検出システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004233132A true JP2004233132A (ja) | 2004-08-19 |
Family
ID=32949805
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003020083A Pending JP2004233132A (ja) | 2003-01-29 | 2003-01-29 | 電気時計の位置検出システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004233132A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012247279A (ja) * | 2011-05-27 | 2012-12-13 | Hitachi Automotive Systems Ltd | インダクタンス式回転角度検出装置及びそれを備えたモータ駆動式の絞り弁制御装置 |
| EP3037898A1 (fr) * | 2014-12-23 | 2016-06-29 | ETA SA Manufacture Horlogère Suisse | Appareil elecromécanique comportant un dispositif de detection capacitif de la position angulaire d'un mobile, et procédé de detection de la position angulaire d'un mobile |
| EP3438765A1 (fr) * | 2017-08-04 | 2019-02-06 | ETA SA Manufacture Horlogère Suisse | Mouvement horloger comportant un dispositif de détection d'une position angulaire d'une roue |
-
2003
- 2003-01-29 JP JP2003020083A patent/JP2004233132A/ja active Pending
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012247279A (ja) * | 2011-05-27 | 2012-12-13 | Hitachi Automotive Systems Ltd | インダクタンス式回転角度検出装置及びそれを備えたモータ駆動式の絞り弁制御装置 |
| EP3037898A1 (fr) * | 2014-12-23 | 2016-06-29 | ETA SA Manufacture Horlogère Suisse | Appareil elecromécanique comportant un dispositif de detection capacitif de la position angulaire d'un mobile, et procédé de detection de la position angulaire d'un mobile |
| EP3037899A1 (fr) * | 2014-12-23 | 2016-06-29 | ETA SA Manufacture Horlogère Suisse | Piece d'horlogerie comportant un mobile de position angulaire determinable |
| CN105737864A (zh) * | 2014-12-23 | 2016-07-06 | Eta瑞士钟表制造股份有限公司 | 包括用于检测轮副的角位置的电容性设备的机电装置以及用于检测轮副的角位置的方法 |
| US9664534B2 (en) | 2014-12-23 | 2017-05-30 | Eta Sa Manufacture Horlogere Suisse | Electromechanical apparatus comprising a capacitive device for detection of the angular position of a wheel set, and method for detection of the angular position of a wheel set |
| JP2017116541A (ja) * | 2014-12-23 | 2017-06-29 | ウーテーアー・エス・アー・マニファクチュール・オロロジェール・スイス | 角度位置を把握可能な車セットを有する計時器 |
| CN105737864B (zh) * | 2014-12-23 | 2018-07-17 | Eta瑞士钟表制造股份有限公司 | 包括用于检测轮副的角位置的电容性设备的机电装置以及用于检测轮副的角位置的方法 |
| US10310452B2 (en) | 2014-12-23 | 2019-06-04 | Eta Sa Manufacture Horlogere Suisse | Timepiece comprising a wheel set with a determinable angular position |
| EP3438765A1 (fr) * | 2017-08-04 | 2019-02-06 | ETA SA Manufacture Horlogère Suisse | Mouvement horloger comportant un dispositif de détection d'une position angulaire d'une roue |
| US11016445B2 (en) | 2017-08-04 | 2021-05-25 | Eta Sa Manufacture Horlogere Suisse | Timepiece movement including a device for detecting an angular position of a wheel |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6088300A (en) | Calendar electronic timepiece | |
| US7535153B2 (en) | Drive control method for a piezoelectric actuator, drive control apparatus for a piezoelectric actuator, and electronic device | |
| JP2004233132A (ja) | 電気時計の位置検出システム | |
| US20050002277A1 (en) | Electric timepiece | |
| US6584040B1 (en) | Electronic timepiece | |
| JP2007089384A (ja) | 圧電アクチュエータの駆動制御装置、電子機器、および圧電アクチュエータの駆動制御方法 | |
| JP2004163128A (ja) | 電気時計の位置検出システム | |
| JP4215438B2 (ja) | 電気時計 | |
| JP4545918B2 (ja) | 特に時計のための発電機およびそれを備えたムーブメント | |
| EP0991176A1 (en) | Ultrasonic motor and method of manufacturing the motor | |
| JP4377111B2 (ja) | 電気時計の位置検出システム | |
| JP4361255B2 (ja) | 電気時計の位置検出システム | |
| EP0874292B1 (en) | Electronic timepiece | |
| US6582118B1 (en) | Electronic timepiece having transmission wheel rotational position detecting apparatus | |
| US20040233793A1 (en) | Analog electronic timepiece | |
| JP4572549B2 (ja) | 電子時計 | |
| JP4385630B2 (ja) | アナログ電子時計 | |
| JP4814007B2 (ja) | 時計 | |
| US20240176300A1 (en) | Information display mechanism, timepiece movement, and timepiece | |
| JP4581443B2 (ja) | 暦表示機能付電子時計 | |
| JP3038823B2 (ja) | 時 計 | |
| JP3033147B2 (ja) | 電子時計 | |
| JP4670396B2 (ja) | 時計 | |
| JP4759975B2 (ja) | 電子時計 | |
| JP4581438B2 (ja) | 暦表示機能付時計 |