JP2004235899A - 空間光通信システム - Google Patents
空間光通信システム Download PDFInfo
- Publication number
- JP2004235899A JP2004235899A JP2003021133A JP2003021133A JP2004235899A JP 2004235899 A JP2004235899 A JP 2004235899A JP 2003021133 A JP2003021133 A JP 2003021133A JP 2003021133 A JP2003021133 A JP 2003021133A JP 2004235899 A JP2004235899 A JP 2004235899A
- Authority
- JP
- Japan
- Prior art keywords
- light
- unit
- transmitting
- light beam
- transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Landscapes
- Mobile Radio Communication Systems (AREA)
- Optical Communication System (AREA)
- Small-Scale Networks (AREA)
Abstract
【課題】小径の光ビームを使用して双方向データ通信を行う場合に、高SN比で通信が可能なような良好な通信経路を迅速に確立する。
【解決手段】まずノード2及びハブ3は共に拡散光を放射し、それぞれの受光部では2次元画像を捉えるイメージセンサ動作モードでの動作により相手側の位置を検出する。その後、ハブ3は、ノード検出位置を中心にした所定の範囲でビーム径を絞った非拡散光をスキャンし、その際にビームの出射角度データを送信信号に載せる。ノード2側では、ハブ検出位置に応じた特定の画素信号のみを高速に読み出す高速通信動作モードに切り替えた上で上記スキャン中に受光量を監視し、最良に受光できるときの出射角度データを抽出する。同様にしてノード2からハブ3に対し非拡散光のスキャンを行う際に、先の最適出射角度データを送信信号に載せることにより、ハブ3側に対しその角度を知らせる。
【選択図】 図11
【解決手段】まずノード2及びハブ3は共に拡散光を放射し、それぞれの受光部では2次元画像を捉えるイメージセンサ動作モードでの動作により相手側の位置を検出する。その後、ハブ3は、ノード検出位置を中心にした所定の範囲でビーム径を絞った非拡散光をスキャンし、その際にビームの出射角度データを送信信号に載せる。ノード2側では、ハブ検出位置に応じた特定の画素信号のみを高速に読み出す高速通信動作モードに切り替えた上で上記スキャン中に受光量を監視し、最良に受光できるときの出射角度データを抽出する。同様にしてノード2からハブ3に対し非拡散光のスキャンを行う際に、先の最適出射角度データを送信信号に載せることにより、ハブ3側に対しその角度を知らせる。
【選択図】 図11
Description
【0001】
【発明の属する技術分野】
本発明は空間光通信システムに関し、更に詳しくは、オフィス内等の比較的通信距離が短い反面、通信対象としてカバーすべき範囲が広いような空間における無線LAN(Local Area Network)等の光通信に好適なシステムに関する。
【0002】
【従来の技術】
従来より、オフィス等の比較的狭い空間において、コンピュータ間や周辺機器、他のOA機器等を相互に接続するために、赤外線等による空間光通信を利用したシステムが知られている(例えば特許文献1など参照)。 図1は、こうした空間光通信システムの典型的な構成を簡略化して示した一例である。
【0003】
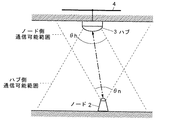
この光空間通信システムでは、コンピュータやプリンタなどの各端末機器1にそれぞれ送受光端末機であるノード2が接続され、一方、そのノード2に対して見通しのよい天井や壁の高い位置などにアクセスポイントとしてのハブ3が設置される。各ハブ3は所定面積で且つ所定距離内のエリアを送受信可能範囲としてカバーしており、端末機器1の配置条件などに応じてハブ3の設置間隔が決められる。各ハブ3は、例えば天井裏内空間等に敷設されたイントラネット等のネットワーク回線4に接続される場合もあるし、或いは単に中継ポイントとしてのみ利用される場合もあり得る。
【0004】
こうした空間光通信システムにおいては、ノード2とハブ3とはそれぞれ、情報を載せた光ビームを出射する送光部と、相手側の送光部から到来する光ビームを受ける受光部とを具備しており、これによりノード2とハブ3との間では双方向に光を介したデータ通信が可能となっている。
【0005】
受光部には、ホトダイオード等の受光素子を有する受光センサが用いられるが、一般に、このような受光センサでは、応答の高速性と受光信号のSN比の向上とは相反した要求である。即ち、通信速度を上げるべく高速応答を実現するには、受光素子の接合容量を小さくする必要があり、そのためには受光面の面積を小さくしなければならない。すると、受光量が減少して信号強度が低くなり、高いSN比を確保することが難しくなる。その結果、送受信可能な距離が短くなったり、或いは外乱光による影響を受け易くなったりする。逆に、高い信号強度を確保するには受光面の面積を或る程度広くする必要があるが、それに伴い接合容量も増加して応答特性が低下し、それによって通信速度が制限される。
【0006】
特に最近、ネットワークの高速化、大容量化の進展に伴い、無線LANにおける高速化に対する要求が一段と高まっており、高いSN比を確保しつつ通信速度を如何に上げるかということが、空間光通信における大きな課題の一つになっている。
【0007】
ところで、こうした空間光通信システムでは、ノード2の設置位置が、それほど頻繁ではないものの(移動体通信に比較すれば)或る程度変更されることが想定される。そのため、天井や壁面上部に設置されたハブ3は複数のノード2との通信が必要になる上に、或る程度の範囲内のいずれに置かれたノード2とも通信が可能であるようにする必要がある。一方、ノード2側においても、自らの放射光がいずれかのハブ3に届くようにする必要がある。そのため、図2に示すように、ノード2、ハブ3のいずれにおいても、或る程度の広い出射角(ノード2側角度θn、ハブ3側角度θh)を有して広がるような拡散光を光信号として出射するのが一般的である。
【0008】
しかしながら、こうした場合、実際に通信に利用されるのはごく一部の光にすぎないから、無駄なエネルギーを消費していることになる。また、広い範囲に光を放射しようとすると、単位面積当たりに照射される光のエネルギー(光量)は少なくならざるをえないから、通信路のSN比を高くすることが難しく、データのエラー発生確率が高くなるとともに、通信のデータレートを上げるにも不利である。即ち、こうした拡散光による双方向通信は、上述したような高いSN比と高い通信速度を実現するためには、非常に不利な方法である。
【0009】
【特許文献1】
特開2001−24665号公報
【非特許文献1】
香川景一郎、他8名、「光無線用高速ビジョンチップの開発」、光通信システム、電子情報通信学会技術研究報告、社団法人電子情報通信学会、平成13年9月7日、Vol.101、No.283、p.31−36
【0010】
【発明が解決しようとする課題】
こうした課題の解決策の1つとして、本発明者らは、非特許文献1や特願2002−58698号等により、新規の受光センサを利用した空間光通信システムを提案している。この受光センサは、CCDセンサ等の一般のイメージセンサと同様に、画素を構成する微小受光素子が2次元的に配列された受光面を有しながら、画素全体を利用した撮像機能と特定の画素のみを選択的に利用した高速通信機能とを併せ持つ。そこで、例えばハブがノードの位置を認識していない場合、まずノードは広い角度範囲に光を放射するような拡散光を発する一方、ハブは撮像機能(イメージセンサモード)を利用して2次元画像を取得し、その画像中でノードを検出することによりノードの位置を特定する。その後、ノードから到来する光ビームが照射されている1乃至複数の受光素子(画素)のみを選択し、それら受光素子による受光信号を加算して高速に取り出すことができる。
【0011】
こうした通信方法では、送光側において光ビームの径を絞るほど単位断面積当たりの光量が増加し、SN比を改善するのに有利であるとともに、受光面の面積も小さくて済むので高速化にも有利である。しかしながら、その反面、光ビームが少しずれてしまっただけで受光面から外れる恐れがある。つまり、光ビームの位置ずれに対する許容度が低いため、良好な通信状態を確保するためには、受光部側にとって最適な方向に向けて送光側から光ビームを出射するべく、出射方向の調整を高い精度で行うことが望ましい。
【0012】
また、こうして光ビームの出射方向を調整して良好な通信経路を一旦確立しても、様々な要因によって光ビームのずれが生じ、通信状態が劣化することがあり得る。従って、良好な通信状態を維持するためには、たとえ通信中であっても、必要に応じて光の出射方向を修正するといった処理が必要となる場合がある。
【0013】
本発明はかかる課題を解決するために成されたものであり、その第1の目的とするところは、或る2つの送受信装置の間で小径の光ビームを用いて双方向に空間光通信を行う場合に、高いSN比が得られるような高品位の信号による通信経路を迅速に確立することができる空間光通信システムを提供することである。
【0014】
また、本発明の第2の目的とするところは、上記のように通信経路を確立した後に光ビームのずれが生じた場合でも、迅速にこれを修正して高品位な通信経路を維持することができる空間光通信システムを提供することである。
【0015】
【課題を解決するための手段】
上記第1の目的を達成するために成された第1発明は、共に送光部及び受光部を具備する第1及び第2の送受信装置を含み、一方の送受信装置の送光部から他方の送受信装置の受光部に向けて小径の光ビームを放射して双方向に光通信を行う空間光通信システムにおいて、
第1送受信装置は、
a1)第1送光部において光ビームの出射方向を走査する光ビーム走査手段と、
a2)その光ビーム走査時に、当該時点での光の出射方向又はそれに相当する出射方向情報を送信信号に含ませる第1送信信号処理手段と、
a3)前記走査された光ビームに応答して第2送受信装置から送られて来る光ビームを第1受光部により受けた後、その受信信号に含まれる後記最適出射方向情報を抽出する第1受信信号処理手段と、
a4)その最適出射方向情報に基づいて第1送光部における光ビームの出射方向を設定するビーム出射方向設定手段と、
を備え、第2送受信装置は、
b1)前記第1送受信装置から送られて来る前記走査された光ビームを第2受光部により受け、その受信信号が最大又はそれに近い略最適な通信状態となる状態を検出する通信状態検出手段と、
b2)前記略最適な通信状態であるとされたときの受信信号に含まれる前記出射方向情報を取得する第2受信信号処理手段と、
b3)前記取得された出射方向情報を最適出射方向情報として送信信号に含ませ、前記第2送光部により第1送受信装置に向けて光ビームを出射する第2送信信号処理手段と、
を備えることを特徴としている。
【0016】
また、上記第2の目的を達成するために成された第2発明は、共に送光部及び受光部を具備する第1及び第2の送受信装置を含み、一方の送受信装置の送光部から他方の送受信装置の受光部に向けて小径の光ビームを放射して双方向に光通信を行う空間光通信システムにおいて、
第1送受信装置は、
a1)第1送光部により当該第1送受信装置から第2送受信装置に向けて出射された光ビームに対応して、該第2送受信装置から送られて来る光ビームを第1受光部により受けた後、その受信信号に含まれる後記ずれ情報を抽出する第1受信信号処理手段と、
a3)該ずれ情報に基づいて第1送光部における光ビームの出射方向を調整する光ビーム調整手段と、
を備え、第2送受信装置は、
b1)第2受光部の受光面の手前にあって光軸を囲んで複数設けられた受光手段の出力に基づいて、前記第1送受信装置からの光ビームによる該第2受光部に対する入射光の方向のずれ量を検出するずれ検出手段と、
b2)該ずれ量を表すずれ情報を送信信号に含ませ、第2送光部により第1送受信装置に向けて光ビームを出射する第2送信信号処理手段と、
を備えることを特徴としている。
【0017】
【発明の実施の形態、及び効果】
第1発明に係る空間光通信システムでは、次のような手順により、第1及び第2光通信装置の間での通信経路を確立する。即ち、第1送受信装置において、光ビーム走査手段a1)は、第1送光部において光ビームの出射方向を所定の範囲内で走査する。その際に、第1送信信号処理手段a2)はそれぞれ時点での光の出射方向又はそれに相当する出射方向情報を送信信号に含ませる。従って、実際の光ビームの出射方向とその光ビームによる送信信号に含まれる出射方向情報が示す出射方向とは一致している。
【0018】
一方、第2送受信装置においては、第1送受信装置から送られて来る光ビームを第2受光部により受けて受信信号を取り出すが、上述したようにその光ビームは走査されているから、受信信号の大きさはその走査に伴って変動する。この受信信号が最大であるときに第1送受信装置における光ビームの出射方向は最適であると看做せるから、通信状態検出手段b1)は、光ビームの走査の過程において受信信号が最大又はそれに近い略最適な通信状態となる状態を検出する。第2受信信号処理手段b2)は、略最適な通信状態であるとされたときの受信信号に含まれる出射方向情報を取得する。この時点で、第1送受信装置における光ビームの最適出射方向が第2送受信装置において認識できる。
【0019】
次に、今度は第2送受信装置から第1送受信装置に向けて応答信号を送るべく、第2送信信号処理手段b3)は、その出射方向情報を最適出射方向情報として送信信号に含ませ、第2送光部により第1送受信装置に向けて光ビームを出射する。第1送受信装置では、上記のような光ビームの出射と並行して又は時分割で、第1受光部により第2送受信装置から送られて来る光ビームを受け、第1受信信号処理手段a3)はその受信信号に含まれる最適出射方向情報を抽出する。この時点で、第1送受信装置における光ビームの最適出射方向が、当該第1送受信装置においても認識できる。そこで、ビーム出射方向設定手段a4)は、その最適出射方向情報に基づいて、第1送光部における光ビームの出射方向を設定する。
【0020】
これにより、第1送受信装置から第2送受信装置に向けて小径の光ビームで信号を送る際の最適又はそれに近い状態の通信経路が確立できる。但し、この状態では第2送受信装置から第1送受信装置に向けて光信号を送る際の通信経路は最適又はそれに近い状態であるとは限らない(一般的にはそうでない)から、逆方向にも同様の動作を行うようにすることによって、双方向通信の際の通信経路を確立することができる。
【0021】
このように第1発明に係る空間光通信システムによれば、光ビームの径を小さくしても受光がほぼ最良となるようなビーム出射角度を迅速に確定し、空間内での良好な通信経路を確立することができる。従って、通信経路確立後に行うデータ通信の際には単位面積当たりの受光面で受ける受光強度が大きくなり、高いSN比を確保し易くなるとともに、或る程度のSN比を確保しつつ受光面積を小さくすることもできる。これによって、受光素子の接合容量の影響が小さくなり、応答の高速化が図れるため、通信速度を向上させることができる。
【0022】
なお、第1発明に係る空間光通信システムの好ましい一実施形態として、前記受光部は、2次元状に配置された複数の受光素子による受光信号を利用して2次元画像を取得する第1の動作モードと、前記複数の受光素子のうちの特定の1乃至複数の受光素子による受光信号のみを選択的に読み出すことにより高速の信号読み出しを行う第2の動作モードとの切り替えが可能であり、前記第1送受信装置にあって光ビーム走査手段は、第1受光部において第1の動作モードにより第2送受信装置の位置を検出した上で、その検出位置に基づいて光ビームの走査範囲を決める構成とすることができる。
【0023】
この構成によれば、予め相手側の送受信装置の位置をおおよそ特定した上で、その位置付近に対して光ビームの走査を実行すればよいので、光ビームの走査範囲をかなり絞ることができ、通信経路の確立を短時間で行うことができる。
【0024】
また、この場合、前記第2送受信装置にあって通信状態検出手段は、第2受光部において第1の動作モードにより第1送受信装置の位置を検出し、その検出位置に基づいて特定の受光素子を決定して第2の動作モードに切り替えた上で、通信状態の判定を行う構成とすることができる。
【0025】
第2発明に係る空間光通信システムでは、次のような手順により、第1及び第2送受信装置の間での通信経路を維持する。即ち、第1送光部により第1送受信装置から第2送受信装置に向けて光ビームが出射されている状態において、第2送受信装置では、ずれ検出手段b1)が、その光ビームによる該第2受光部に対する入射光の方向のずれ量を検出する。第2送信信号処理手段b2)は、定期的又は不定期的に上記ずれ量を表すずれ情報を送信信号に含ませ、第2送光部により第1送受信装置に向けて光ビームを出射する。従って、第2送受信装置から第1送受信装置に向けて送られる光ビームによる光信号には、少なくとも適宜の時点で、第1送受信装置の第1送光部と第2送受信装置の第2受光部とでの光線方向のずれ量を反映したずれ情報が含まれる。
【0026】
第1送受信装置では、光ビームの出射と並行して又は時分割で、第1受光部により第2送受信装置から送られて来る光ビームを受け、第1受信信号処理手段a1)はその受信信号に含まれるずれ情報を抽出する。この時点で、上記のような光線方向のずれ量が第1送受信装置においても認識できる。そこで、ビーム調整手段a2)は、そのずれ情報に基づいて第1送光部における光ビームの出射方向を調整する。これにより、第1送受信装置の第1送光部と第2送受信装置の第2受光部とで光線方向がほぼ一致し、第2受光部の受光面に対し最良の状態(一般には受光強度が最大になる状態)で光ビームが到達する。
【0027】
このように第2発明に係る空間光通信システムによれば、上述のようにして一旦、空間内での通信経経路が確立された後、温度等による機械的なドリフト要因などによって光線方向がずれてきた場合であっても、このずれを迅速に修正し、良好な通信状態を維持することができる。
【0028】
【実施例】
以下、本発明に係る空間光通信システムの一実施例について、図面を参照しつつ詳細に説明する。
【0029】
まず、本実施例による空間光通信システムに利用される受光センサの構成及び動作について、簡単に説明する。この受光センサは、上記非特許文献1や特願2002−58698号により、本願発明者が提案しているものである。図3は、この受光センサ100の内部構成の概略図である。
【0030】
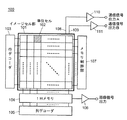
イメージセル部101には、1画素を構成する単位セル102が2次元の行列状に多数配置されている。各単位セル102はそれぞれ受光素子としてホトダイオード(PD)を備えており、イメージセル部101に照射された光は各PDにより光電変換され、画素単位で電気信号を発生する。イメージセル部101には行デコーダ103、1Hメモリ104、メモリ制御部107が接続されている。行デコーダ103は列方向に配列された単位セル102を順次選択し、選択された単位セル102から垂直信号線(図示しない)への電気信号の読み出しを制御する。1Hメモリ104は、行デコーダ103により選択された単位セル102から読み出された電気信号を画素単位でサンプルホールドする。1Hメモリ104にホールドされた1水平ライン分の電気信号は、列デコーダ105の制御の下に1画素ずつ順次読み出され、アンプ106で増幅された後に画像信号として出力される。
【0031】
一方、メモリ制御部107は、各単位セル102に備えられるセル選択メモリへの選択制御データの書き込みを制御する。イメージセル部101からは出力信号線として2本(3本以上に拡張可能)の高速読み出し信号線108、109が引き出されており、それら高速読み出し信号線108、109はそれぞれ電流加算アンプ110、111を通して通信信号出力A、Bとして外部へと出力される。単位セル102は、上記PD及びセル選択メモリのほかに、PDで光電変換された電気信号(電荷)を蓄積し、その蓄積電荷信号を増幅する蓄積増幅器、PDで光電変換により生じた信号電流を蓄積することなく高速で電流増幅する電流増幅器、セル選択メモリに保持された制御データに応じて、後述のイメージセンサ動作モードに対応した電荷蓄積モードと高速通信動作モードに対応した電荷非蓄積モードとの切り替えを行う選択部などをを備える。
【0032】
次に、上記構成を有する受光センサ100の動作を説明する。この受光センサ100では、外部より供給される各種制御信号に応じて、イメージセンサ動作モード(第1の動作モード)と高速通信動作モード(第2の動作モード)との2つのモードでの動作が可能である。
【0033】
(1)イメージセンサ動作モード
一般的なCMOSイメージセンサと同様の読み出し動作を行うモードであって、電荷蓄積期間と信号読み出し期間とが時分割で設けられる。電荷蓄積期間において、イメージセル部101に何らかの2次元画像が投影されると、イメージセル部101に含まれる各単位セル102中のPDはその2次元画像のうちの微小領域に対応する光をそれぞれ受光し、その受光強度に応じた電荷を発生する。この信号電荷は時間の経過に伴って蓄積されるから、受光強度が微弱であっても、電荷蓄積期間を長くとることにより高いレベルの電気信号を得ることができる。所定の電荷蓄積期間が終了した後、信号読み出し期間に移行し、1Hメモリ104を介して、イメージセル部101に含まれる全ての画素に対応する電気信号が順次1画素ずつ画像信号出力として読み出される。この電気信号により2次元画像を構成することができる。
【0034】
(2)高速通信動作モード
イメージセル部101に含まれる単位セル102のうち、任意の1乃至複数の単位セル102のみを選択して、それら単位セル102のPDで光電変換により発生した信号電流を、蓄積することなく加算して外部へと出力する。単位セル102の選択は、メモリ制御部107からセル選択メモリへ書き込まれる選択制御データに応じて制御される。複数の単位セル102が選択された場合には、高速読み出し信号線108又は109に対し複数の単位セル102から同時に信号電流が出力され、その信号線108又は109上で電流が加算(合成)される。
【0035】
この高速通信動作モードでは、PDで発生した電気信号を積分することなく電流増幅器を介して出力するため、単位セル102毎の応答が非常に高速である。また、高速通信動作モードで動作する際のPDの実効的な容量は電流加算する画素数に依存するが、加算する最大画素数を制限することにより、実効的な容量を小さくして通信速度を優先することができる。また、イメージセル部101内で光が照射されていない領域の単位セル102におけるPDの暗電流や、それらPDに外乱光が照射されて生じる電気信号の影響を排除できるので、受光信号の純度が向上しSN比が改善できる。
【0036】
次に、上記受光センサ100を受光部に利用した、本実施例の空間光通信システムの一実施例について説明する。図4はこの空間光通信システムを構成するハブ3の要部のブロック構成図である。なお、ノード2の構成も基本的にはハブ3の構成と同様である。
【0037】
ハブ3は、送光部10として拡散出射光学系11と非拡散出射光学系12の2つの光学系を備える。拡散出射光学系11は光源としてLEDなどを含み、図示するように広い照射角度範囲に向けて光を出射する。一方、非拡散出射光学系12は、LEDなどの光源、複数のレンズ系のほか、MEMS(Micro Electro Mechanical Systems)デバイスなどで駆動される超小型ミラー13や2次元スキャンレンズ14などを含み、図示するように狭い照射角度範囲に向けて平行光に近い光径の小さな光を出射し、しかも、超小型ミラー13の回動によって、所定の範囲内で上記出射光の出射方向の調整が可能となっている。なお、周知のように、MEMSデバイスによれば出射光の方向調整は非常に高速で行える。また、受光部15は、入射光を集光するレンズ16と上述した構成の受光センサ17とを備える。
【0038】
電気系回路としては、受光センサ17からの画像信号出力を受ける画像処理部20、該画像処理部20で作成された画像に対して画像認識等の処理を施すことにより目的とするノード2(又はハブ3)の位置を検出する位置検出部21、受光センサ17からの通信信号出力を受けてデータ復調処理等を行って所望のデータを取り出す受信処理部22、上記送光部10の光源を駆動するとともに2つの出射光学系を切り替える機能を有する光源駆動部23、超小型ミラー13を駆動するミラー駆動制御部24、ネットワーク回線4(又は端末機器1)に接続されたインタフェイス部26を経て入力されて来るデータに対してデータ変調処理などを行って送信可能な形式に変換する送信処理部25と、上記各部の動作を制御する制御部27、などを備える。
【0039】
本実施例の空間光通信システムでは、拡散出射光学系11と非拡散出射光学系12とを使い分け、且つ受光センサ17を含む受信回路系では上記イメージセンサ動作モードと高速通信動作モードとを使い分けることにより、ハブ3とノード2との間での双方向通信を行う際の通信経路の確立動作を行う。次に、その点について詳細に説明する。
【0040】
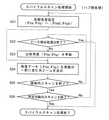
図5及び図6は通信経路確立処理の動作手順を示すフローチャート、図7はハブ側でのスパイラルスキャン処理の動作手順を示すフローチャート、図8はノード側でのピーク検出処理の動作手順を示すフローチャート、図9はノード側でのスパイラルスキャン処理の動作手順を示すフローチャート、図10はハブ側でのピーク検出処理の動作手順を示すフローチャートである。また、図11はハブ3とノード2との間での光の照射状態を模式的に示す図、図12はノード側でのイメージセンサ動作モードの際に取得される2次元画像の一例を示す図、図13はスパイラルスキャンの際のビームの移動軌跡を模式的に示す図である。なお、以下の説明では、ハブ3側とノード2側とでの構成要素の符号を区別するために、ハブ3側は上記説明に使用した符号の後にhを付し、ノード2側は同じ符号の後にnを付す。
【0041】
まず、ハブ3側では、通信の相手先であるノード2に自らの位置を知らせるために、位置通知用拡散光点滅出射モードでの動作を実行する(ステップHS1)。即ち、制御部27hは、所定の周波数で点滅する(つまり強度変調された)拡散光を出射するように光源駆動部23hを制御する。これにより、図11(a)に示すように、拡散出射光学系11hにより、ハブ3からノード2の設置場所を含む広い範囲に広がる光が照射される。
【0042】
一方、ノード2側では、制御部27nはハブ3の位置を検出するために、受光センサ17nをイメージセンサ動作モードで動作させる(ステップNS1)。上述したように受光センサ17nの画像信号出力には、イメージセル部101で捉えられている2次元画像に対応する画素信号が順次出力される。画像処理部20nはこの画素信号を受けて、例えば図12に示すような2次元画像を作成する。該2次元画像内にはハブ3の投影像Phを含み、且つ、上記のようにハブ3から放射される拡散光は所定周波数で点滅しているから、位置検出部21はこのような2次元画像に対して画像認識処理を行うことにより、容易にハブ3の位置を検出することができる。
【0043】
この位置検出結果により、制御部27nはイメージセル部101においてハブ3の位置に対応した画素(単位セル102)の位置と数とをそれぞれ決定し、受光センサ17nに対し、選択された1乃至複数の単位セル102を高速通信動作モードで動作するように切り替える(ステップNS2)。これにより、ノード2側においてハブ3から送られて来る光を高速で受光する準備が整う。
【0044】
次いで、今度はノード2側において、通信相手先であるハブ3に自らの位置を知らせるために、位置通知用拡散光点滅出射モードでの動作を実行する(ステップNS3)。即ち、制御部27nは、所定周波数で点滅する拡散光を出射するように光源駆動部23nを制御する。これにより、図11(b)に示すように、ノード2からハブ3の設置場所を含む広い範囲に広がる拡散光が照射される。
【0045】
ハブ3側では、ノード2側のステップNS1、NS2と同様のステップHS2、HS3の処理により、受光センサ17hをイメージセンサ動作モードで動作させ、位置検出部21hはイメージセル部101で捉えた2次元画像に基づいてノード2の位置を検出する。そして、制御部27hは、イメージセル部101においてノード2の位置に対応した画素(単位セル)の位置と数とをそれぞれ決定し、受光センサ17hに対し、選択された1乃至複数の単位セル102を高速通信動作モードで動作するように切り替える。これにより、ハブ3側でもノード2から送られて来る光を高速で受光する準備が整う。
【0046】
その後、ハブ3側ではスパイラルスキャン処理を実行し(ステップHS4)、ノード2側ではピーク検出処理を実行する(ステップNS4)。即ち、ハブ3側では、非拡散出射光学系12hにより出射する小光径の光ビームの出射角度(θhx,θhy)をまず初期角度(θhx0,θhy0)に設定する(ステップS21)。この出射角度(θhx,θhy)が、ハブ3から出射されるビームの出射方向を決めるパラメータである。そして、超小型ミラー13hを制御してその方向へ光が照射されるようにミラー駆動制御部24hを制御し、拡散光に代えて、出射角度データ〔θhx,θhy〕を情報の一部として含むような信号光を送出する(ステップS24)。
【0047】
ここで、初期角度(θhx0,θhy0)の決め方の一例について説明する。そもそも、このような光ビームのスキャンを行うことによって最適な出射角度を決めるのは、上述したように2次元画像に基づいて検出したノード(ハブでも同様)の位置座標が或る程度の曖昧さを有しているためである。これは受光センサ17の1画素が見込む角度が有限であること等に由来する。従って、ビーム径がこの検出位置の曖昧さよりも小さい場合には、光ビームがレンズ16に入らない場合があり得る。そこで、この曖昧さを含む領域内で光ビームをスキャンして正確な出射角度を探索することが、スパイラルスキャン処理の意図である。
【0048】
一般に、拡散光を発しているハブ3の投影像Phは、図12にも示したように複数画素に跨って検出される。この場合、その光源位置座標(X,Y)は、それら複数の画素の重心(X’,Y’)で与えるのが妥当である。そこで、この重心(X’,Y’)を(X,Y)として次式に適用することにより、初期出射角度を求めることができる。
(θx,θy)=( arctan(Δx・X/f),arctan(Δy・Y/f) )
ここで、Δx×Δyは画素サイズ、fは撮像レンズの焦点距離である。但し、上記式は、画素サイズが有限であることに加え、受光側の結像レンズ16と送光側の2次元スキャンレンズ14との位置が異なることに起因する誤差を含む近似的な式である。
【0049】
ハブ3(ノード2でも同様)の制御部27hは、位置検出部21hで検出されたノードの位置に基づき、上記のような処理を実行することにより、適切な初期出射角度を算出することができる。これにより、図11(c)に示すように、ハブ3からノード2の方向に向けて、ほぼ平行光である光ビームが出射角度(θhx,θhy)で以て照射される。或る出射角度(θhx,θhy)の状態は、後述するようなノード2側でのピーク検出処理で1つの出射角度に対する処理を終了するのに要する時間を考慮して、その時間以上継続される。
【0050】
上記時間だけ或る出射角度で以て光ビームを放射した後、領域内スキャンを終了したか否かを判定し(ステップS25)、終了するまではステップS22へと進み、ピーク検出処理が終了しているか否かを判定する。図5及び図6のフローチャートではステップHS4のスパイラルスキャン処理の後にステップHS5のピーク検出処理を実行するようになっているが、実際には、スパイラルスキャン処理とほぼ同時にピーク検出処理は開始される。これは、スパイラルスキャン処理の開始直後にノード2側からの応答信号が到来する可能性があるからである。この点については後で詳述する。
【0051】
ステップS22でピーク検出処理が終了していると判定される場合には、既に最適なビーム出射角度が見い出されているか、或いは逆にタイムアウト等により適切なビーム出射角度が見つからないことが明確になっているかのいずれかであるから、スパイラルスキャン処理を終了する。一方、ステップS22でピーク検出処理が終了していないと判定された場合には、ビームの出射角度(θhx,θhy)を次の角度、即ち、図13に示したようにスパイラル状に移動する経路上の次の角度に更新し(ステップS23)、再びステップS24以降へと進む。ここでスパイラル状にスキャンする理由は、最も効率良くつまり短時間で最適出射角度を見つけることができると想定されるからであって、もちろんスキャンの順序や方向はこれに限るものではない。
【0052】
ステップS25で所定領域内のスキャンを終了したと判定された場合には、次に所定回数(例えば3回)のスキャンを終了したか否かを判定し(ステップS26)、未だ所定回数のスキャンを終了していなければステップS21へと戻り、出射角度を初期値に設定して新たなスキャンを実行する。従って、途中でピーク検出処理が終了するまで所定回数のスパイラルスキャンを繰り返し実行し、所定回数に達したときにスパイラルスキャン処理を終了することになる。
【0053】
一方、上記スパイラルスキャンによる光ビームを受けるノード2側では、光ビームがレンズ16nを経て受光センサ17nのイメージセル部101に照射される。上記のように高速通信動作モードに設定された1乃至複数個の単位セル102からの合算信号を取り出し、受信処理部22nはその信号レベルが所定の閾値以上であるか否かを判定する(ステップS31、S32)。信号レベルが閾値以上である場合には、受光信号に含まれる出射角度データ〔θhx,θhy〕を抽出するとともに(ステップS33)、信号レベルがそのピーク検出処理において過去に得られた信号レベルと比較して最大であるか否かを判定する(ステップS34)。最大である場合には上記ステップS33で抽出した出射角度データ〔θhx,θhy〕を仮の最適出射角度として(θhxb,θhyb)に上書き保存する(ステップS35)。そして、信号レベルが所定の処理終了閾値以上であるか否かを判定し(ステップS36)、処理終了閾値以上であればこのピーク検出処理を終了する。
【0054】
ステップS32で検出値が閾値以上でない、ステップS34で検出値が最大でない、又はステップS36で検出値が終了閾値以上でないと判断された場合、いずれもステップS37へと進み、処理開始から所定時間が経過したか否かを判定する。所定時間が経過していなければ上記ステップS31とへ戻るが、所定時間が経過している場合にはステップS38へと進み、最適出射角度(θhxb,θhyb)が得られたか否かを判定する。上記処理で1回でもステップS34からS35へと進めば最適出射角度(θhxb,θhyb)が得られるが、例えば信号レベルの検出値が常に閾値未満であるような場合には最適出射角度(θhxb,θhyb)が得られない。そこで、最適出射角度(θhxb,θhyb)が得られていなければピーク検出異常であると判断し(ステップS39)、例えば異常フラグを設定した上で処理を終了する。それ以外の場合には、ピーク検出処理の結果、最適出射角度(θhxb,θhyb)が検出されている筈である(ステップNS5)。
【0055】
次に、今度はノード2側において、上記ハブ3側と同様にしてスパイラルスキャン処理を実行する(ステップNS6)。上記ピーク検出処理が終了するとすぐにスパイラルスキャン処理が開始されるから、ピーク検出処理の開始直後に最適出射角度(θhxb,θhyb)が見い出された場合には、ハブ3側でのスパイラルスキャン処理の開始とノード2側でのスパイラルスキャン処理の開始とで時間遅れは非常に小さく、すぐに非拡散光である光ビームがノード2からハブ3へと送られ始める。これが、上述したように、ハブ3側でスパイラルスキャン処理と並行してピーク検出処理を実行する理由である。
【0056】
ノード2側におけるスパイラルスキャン処理の手順は図9のフローチャートに示すように、ハブ3側におけるスパイラルスキャン処理の手順(図7)とほほ同様である。異なる点は、光ビームの初期出射角度がノード2側での画像処理結果から求まったハブ3の検出位置に基づいて決められた角度(θnx0,θny0)であることと、送信信号に情報の一部として、その時点でのノード2からの光ビーム出射角度を表す角度データ〔θnx,θny〕のみならず、先に取得したハブ3側における最適出射角度を表す角度データ〔θhxb,θhyb〕も含むようにすることである。
【0057】
一方、ハブ3側ではステップHS5によりピーク検出処理が実行される。ハブ3側におけるピーク検出処理の手順は図10のフローチャートに示すように、ノード2側におけるピーク検出処理の手順(図8)とほほ同様である。異なる点は、2つの角度データ、〔θnx,θny〕及び〔θhxb,θhyb〕を取得することとである。このような処理により、多くの場合、ノード2側の最適出射角度(θnxb,θnyb)を取得することができ、並行して自らの最適出射角度(θhxb,θhyb)を認識することができる(ステップHS6)。
【0058】
最適出射角度(θhxb,θhyb)が得られたならば、ミラー駆動制御部24hを介して超小型ミラー13hを駆動し、光ビームの出射角度をその角度(θhxb,θhyb)に設定する。そして、今度は、送信処理部25hが角度データ〔θnxb,θnyb〕を情報の一部として送信信号に埋め込み、送光部10hはその送信信号を光ビームとしてノード2に向けて送出する(ステップHS7)。この光ビームを受け、ノード2側では、受信処理部25hが角度データ〔θnxb,θnyb〕を抽出することにより、自らの最適出射角度(θnxb,θnyb)を認識することができる(ステップNS7)。
【0059】
その後、ノード2側でも、ミラー駆動制御部24nを介して超小型ミラー13nを駆動し、光ビームの出射角度を(θnxb,θnyb)に設定した上で、所定の確認信号を送出する(ステップNS8)。ハブ3側では、所定のタイムアウト時間が経過するまで確認信号の到来を監視し(ステップHS8、HS9)、確認信号を受信したならば通信経路が確立したものと判断する。その一方、確認信号が来る前にタイムアウトに到った場合には通信経路の確立ができなかったものと判断する。
【0060】
このようにしてハブ3、ノード2の双方で互いに相手側から送られてくる光ビームの出射角度を確定することにより、両者の間で最良又はそれに近い状態の通信経路を確立することができるから、以降は、その状態で所望のデータ通信を開始すればよい。
【0061】
なお、通信を開始する前に上記のように通信経路を確立する動作を行うのはもちろんであるが、データ通信の途中で通信の途切れが或る時間継続した場合には、上記のような手順で通信経路の確立を再度試みるようにするとよい。即ち、データ通信中に通信の途切れが発生した場合、様々な原因が考えられるが、頻度の高い原因としては、光の遮蔽とノード2の移動(但し、固定設置でない場合)とが考え得る。光の遮蔽の場合、短時間の遮蔽であれば、そのまま待機していればすぐに通信を回復させることが可能であるが、ノード2が移動された場合には、光ビームの出射角度を設定し直す必要がある。この場合でも、上記処理を実行することによって、ノード2とハブ3とは互いに位置を検出し、通信を再開することができる。また、通信の途切れとは無関係に、一定時間間隔毎、或いはデータ通信の合間をぬって上記のような通信経路の確立動作を実行し、ノード2とハブ3とのそれぞれの位置を再確認するような制御を行ってもよい。
【0062】
上記説明はハブ3とノード2とが一対一に対応している場合の例であるが、1台のハブ3は複数のノード2に対して実質的に同時並行で通信を行うことが可能である。その場合には、各ノード2が存在する方向に対応してそれぞれ出射角度を決定した後、所定時間毎に超小型ミラー13を高速駆動することによって、時分割で通信を行うようにすればよい。もちろん、より高速に通信を行いたい場合には、ハブ側に、対応するノード2の数だけ非拡散出射光学系12を用意しておき、各ノード2の位置を検出した後に、それらノード2に向けて非拡散出射光学系12の出射角度をそれぞれ決めるようにするとよい。
【0063】
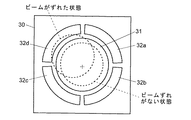
上記のように明らかにノード2が移動しない場合でも、例えば非拡散出射光学系12の超小型ミラー13のドリフト等の要因によって、光ビームの出射角度が時間経過や温度変化に伴って微妙にずれてくることがある。そこで、本実施例の空間光通信システムでは、こうした光ビームの出射角度の微妙なずれを調整するための手段を設けている。次に、この点について図14、15により説明する。図14は受光部におけるビームずれ検出機構の概略構成を示す図、図15は図14中のアパーチャ板30の正面図である。ここでは、ハブ3からノード2に向けて放射する光ビームの出射角度のずれを修正する場合を例に挙げて説明するが、ノード2からハブ3に向けて放射する光ビームの出射角度のずれを修正する場合も全く同様である。
【0064】
図14、図15に示すように、ノード2の受光部15nのレンズ16nの絞り面には、中心に光を通過する円形状の開口部31を穿設したアパーチャ板30を設置している。開口部31の周囲には、略90°間隔で4つに分割されたホトダイオード32a、32b、32c、32dが配置されている。この4個のホトダイオード32a、32b、32c、32dの検出出力はずれ量算出部33に入力されており、4つの信号に対して所定の演算処理を行うことにより光ビームのずれ量を算出する。
【0065】
即ち、ハブ3から送られて来る光ビームがレンズ16nの入射瞳の略中心に来るように入射している場合、光ビームは完全に開口部31を通過し、受光センサ17nの受光面に当たる。その状態からハブ3の送光部10hで出射角度がずれると、アパーチャ板30上では光ビームの照射範囲が開口部31を外れ、1乃至複数のホトダイオード32に光ビームの一部が入射する。そのため、ホトダイオード32ではその入射光量に応じた電気信号が発生する。例えば図15の例では、ホトダイオード32dにのみ電気信号が発生する。
【0066】
入射光の空間分布がガウス分布に従うものと仮定すると、開口部31の中心からの光ビームのずれ量(x0,y0)は次式で与えられる。
x0≒(w2/4b)・{(ix−i−x )/i0}
y0≒(w2/4b)・{(iy−i−y )/i0}
ここで、bはホトダイオードの位置(中心からの距離) 、wはビーム径、ix、i−x、iy、i−yは4個のホトダイオードによる受光強度信号、i0は入射光強度である。ずれ量算出部33は、例えばこうした式に基づく計算アルゴリズムに従って、ホトダイオード32a〜32dから入力された受光強度信号を演算処理し、ビームのずれ量を算出する。
【0067】
図示しないものの、上述のようにして算出されたずれ量はノード2の送信処理部25nへと時々刻々と送られ、送信処理部25nは一定間隔毎又は不定期に(例えばずれ量が大きく変化したときに)、送信信号の情報の一部にずれ量データを載せる。これにより、ずれ量は上記ビームを出射したハブ3側へとフィードバックされることになるから、ハブ3側の受信処理部22hは受信信号からずれ量データを抽出し、ミラー駆動制御部24はそのずれを修正するように超小型ミラー13nを調整する。その結果、送光部10hの非拡散出射光学系12hから出射される光ビームの出射角度が修正され、ノード2の受光部15では光ビームが開口部31を完全に通過して受光センサ17nに到達する。
【0068】
なお、上記説明は、ビーム径がレンズ16の径よりも小さい場合を想定しているが、ビーム径がレンズ径に比べて充分に大きい場合には、レンズ16の入射面にアパーチャ板30を設置する構成としてもよい。
【0069】
なお、第1及び第2発明に係る空間光通信システムは必ずしも双方向に光通信を行うものだけでなく、一方向のみに光通信を行うものにも適用が可能である。また、上記実施例は本発明の一例にすぎず、本発明の趣旨の範囲で適宜変形、修正、追加等を行っても本願特許請求の範囲に包含されることは明らかである。
【図面の簡単な説明】
【図1】本発明の適用対象である空間光通信システムの典型的な構成の一例の概略図。
【図2】図1に示した空間光通信システムで従来の一般的な通信時における光の照射状態を模式的に示した図。
【図3】本実施例の空間光通信システムで使用される受光センサの内部構成の概略図。
【図4】本実施例の空間光通信システムにおけるハブ(又はノード)の要部のブロック構成図。
【図5】本実施例の空間光通信システムにおいて通信経路確立処理の動作手順を示すフローチャート。
【図6】本実施例の空間光通信システムにおいて通信経路確立処理の動作手順を示すフローチャート。
【図7】本実施例の空間光通信システムにおいてハブ側でのスパイラルスキャン処理の動作手順を示すフローチャート。
【図8】本実施例の空間光通信システムにおいてノード側でのピーク検出処理の動作手順を示すフローチャート。
【図9】本実施例の空間光通信システムにおいてノード側でのスパイラルスキャン処理の動作手順を示すフローチャート。
【図10】本実施例の空間光通信システムにおいてハブ側でのピーク検出処理の動作手順を示すフローチャート。
【図11】本実施例の空間光通信システムにおいてハブとノードとの間での光の照射状態を模式的に示す図。
【図12】本実施例の空間光通信システムにおいてノード側でのイメージセンサ動作モードの際に取得される2次元画像の一例を示す図。
【図13】本実施例の空間光通信システムにおいてスパイラルスキャンの際のビームの移動軌跡を模式的に示す図。
【図14】本実施例の空間光通信システムにおいて受光部でのビームずれ検出機構の概略構成を示す図。
【図15】図14中のアパーチャ板の概略正面図。
【符号の説明】
1…端末機器
2…ノード
3…ハブ
4…ネットワーク回線
10…送光部
11…拡散出射光学系
12…非拡散出射光学系
13…超小型ミラー
14…2次元スキャンレンズ
15…受光部
16…レンズ
17…受光センサ
20…画像処理部
21…位置検出部
22…受信処理部
23…光源駆動部
24…ミラー駆動制御部
25…送信処理部
26…インタフェイス部
27…制御部
30…アパーチャ板
31…開口部
32…ホトダイオード
33…ずれ量算出部
【発明の属する技術分野】
本発明は空間光通信システムに関し、更に詳しくは、オフィス内等の比較的通信距離が短い反面、通信対象としてカバーすべき範囲が広いような空間における無線LAN(Local Area Network)等の光通信に好適なシステムに関する。
【0002】
【従来の技術】
従来より、オフィス等の比較的狭い空間において、コンピュータ間や周辺機器、他のOA機器等を相互に接続するために、赤外線等による空間光通信を利用したシステムが知られている(例えば特許文献1など参照)。 図1は、こうした空間光通信システムの典型的な構成を簡略化して示した一例である。
【0003】
この光空間通信システムでは、コンピュータやプリンタなどの各端末機器1にそれぞれ送受光端末機であるノード2が接続され、一方、そのノード2に対して見通しのよい天井や壁の高い位置などにアクセスポイントとしてのハブ3が設置される。各ハブ3は所定面積で且つ所定距離内のエリアを送受信可能範囲としてカバーしており、端末機器1の配置条件などに応じてハブ3の設置間隔が決められる。各ハブ3は、例えば天井裏内空間等に敷設されたイントラネット等のネットワーク回線4に接続される場合もあるし、或いは単に中継ポイントとしてのみ利用される場合もあり得る。
【0004】
こうした空間光通信システムにおいては、ノード2とハブ3とはそれぞれ、情報を載せた光ビームを出射する送光部と、相手側の送光部から到来する光ビームを受ける受光部とを具備しており、これによりノード2とハブ3との間では双方向に光を介したデータ通信が可能となっている。
【0005】
受光部には、ホトダイオード等の受光素子を有する受光センサが用いられるが、一般に、このような受光センサでは、応答の高速性と受光信号のSN比の向上とは相反した要求である。即ち、通信速度を上げるべく高速応答を実現するには、受光素子の接合容量を小さくする必要があり、そのためには受光面の面積を小さくしなければならない。すると、受光量が減少して信号強度が低くなり、高いSN比を確保することが難しくなる。その結果、送受信可能な距離が短くなったり、或いは外乱光による影響を受け易くなったりする。逆に、高い信号強度を確保するには受光面の面積を或る程度広くする必要があるが、それに伴い接合容量も増加して応答特性が低下し、それによって通信速度が制限される。
【0006】
特に最近、ネットワークの高速化、大容量化の進展に伴い、無線LANにおける高速化に対する要求が一段と高まっており、高いSN比を確保しつつ通信速度を如何に上げるかということが、空間光通信における大きな課題の一つになっている。
【0007】
ところで、こうした空間光通信システムでは、ノード2の設置位置が、それほど頻繁ではないものの(移動体通信に比較すれば)或る程度変更されることが想定される。そのため、天井や壁面上部に設置されたハブ3は複数のノード2との通信が必要になる上に、或る程度の範囲内のいずれに置かれたノード2とも通信が可能であるようにする必要がある。一方、ノード2側においても、自らの放射光がいずれかのハブ3に届くようにする必要がある。そのため、図2に示すように、ノード2、ハブ3のいずれにおいても、或る程度の広い出射角(ノード2側角度θn、ハブ3側角度θh)を有して広がるような拡散光を光信号として出射するのが一般的である。
【0008】
しかしながら、こうした場合、実際に通信に利用されるのはごく一部の光にすぎないから、無駄なエネルギーを消費していることになる。また、広い範囲に光を放射しようとすると、単位面積当たりに照射される光のエネルギー(光量)は少なくならざるをえないから、通信路のSN比を高くすることが難しく、データのエラー発生確率が高くなるとともに、通信のデータレートを上げるにも不利である。即ち、こうした拡散光による双方向通信は、上述したような高いSN比と高い通信速度を実現するためには、非常に不利な方法である。
【0009】
【特許文献1】
特開2001−24665号公報
【非特許文献1】
香川景一郎、他8名、「光無線用高速ビジョンチップの開発」、光通信システム、電子情報通信学会技術研究報告、社団法人電子情報通信学会、平成13年9月7日、Vol.101、No.283、p.31−36
【0010】
【発明が解決しようとする課題】
こうした課題の解決策の1つとして、本発明者らは、非特許文献1や特願2002−58698号等により、新規の受光センサを利用した空間光通信システムを提案している。この受光センサは、CCDセンサ等の一般のイメージセンサと同様に、画素を構成する微小受光素子が2次元的に配列された受光面を有しながら、画素全体を利用した撮像機能と特定の画素のみを選択的に利用した高速通信機能とを併せ持つ。そこで、例えばハブがノードの位置を認識していない場合、まずノードは広い角度範囲に光を放射するような拡散光を発する一方、ハブは撮像機能(イメージセンサモード)を利用して2次元画像を取得し、その画像中でノードを検出することによりノードの位置を特定する。その後、ノードから到来する光ビームが照射されている1乃至複数の受光素子(画素)のみを選択し、それら受光素子による受光信号を加算して高速に取り出すことができる。
【0011】
こうした通信方法では、送光側において光ビームの径を絞るほど単位断面積当たりの光量が増加し、SN比を改善するのに有利であるとともに、受光面の面積も小さくて済むので高速化にも有利である。しかしながら、その反面、光ビームが少しずれてしまっただけで受光面から外れる恐れがある。つまり、光ビームの位置ずれに対する許容度が低いため、良好な通信状態を確保するためには、受光部側にとって最適な方向に向けて送光側から光ビームを出射するべく、出射方向の調整を高い精度で行うことが望ましい。
【0012】
また、こうして光ビームの出射方向を調整して良好な通信経路を一旦確立しても、様々な要因によって光ビームのずれが生じ、通信状態が劣化することがあり得る。従って、良好な通信状態を維持するためには、たとえ通信中であっても、必要に応じて光の出射方向を修正するといった処理が必要となる場合がある。
【0013】
本発明はかかる課題を解決するために成されたものであり、その第1の目的とするところは、或る2つの送受信装置の間で小径の光ビームを用いて双方向に空間光通信を行う場合に、高いSN比が得られるような高品位の信号による通信経路を迅速に確立することができる空間光通信システムを提供することである。
【0014】
また、本発明の第2の目的とするところは、上記のように通信経路を確立した後に光ビームのずれが生じた場合でも、迅速にこれを修正して高品位な通信経路を維持することができる空間光通信システムを提供することである。
【0015】
【課題を解決するための手段】
上記第1の目的を達成するために成された第1発明は、共に送光部及び受光部を具備する第1及び第2の送受信装置を含み、一方の送受信装置の送光部から他方の送受信装置の受光部に向けて小径の光ビームを放射して双方向に光通信を行う空間光通信システムにおいて、
第1送受信装置は、
a1)第1送光部において光ビームの出射方向を走査する光ビーム走査手段と、
a2)その光ビーム走査時に、当該時点での光の出射方向又はそれに相当する出射方向情報を送信信号に含ませる第1送信信号処理手段と、
a3)前記走査された光ビームに応答して第2送受信装置から送られて来る光ビームを第1受光部により受けた後、その受信信号に含まれる後記最適出射方向情報を抽出する第1受信信号処理手段と、
a4)その最適出射方向情報に基づいて第1送光部における光ビームの出射方向を設定するビーム出射方向設定手段と、
を備え、第2送受信装置は、
b1)前記第1送受信装置から送られて来る前記走査された光ビームを第2受光部により受け、その受信信号が最大又はそれに近い略最適な通信状態となる状態を検出する通信状態検出手段と、
b2)前記略最適な通信状態であるとされたときの受信信号に含まれる前記出射方向情報を取得する第2受信信号処理手段と、
b3)前記取得された出射方向情報を最適出射方向情報として送信信号に含ませ、前記第2送光部により第1送受信装置に向けて光ビームを出射する第2送信信号処理手段と、
を備えることを特徴としている。
【0016】
また、上記第2の目的を達成するために成された第2発明は、共に送光部及び受光部を具備する第1及び第2の送受信装置を含み、一方の送受信装置の送光部から他方の送受信装置の受光部に向けて小径の光ビームを放射して双方向に光通信を行う空間光通信システムにおいて、
第1送受信装置は、
a1)第1送光部により当該第1送受信装置から第2送受信装置に向けて出射された光ビームに対応して、該第2送受信装置から送られて来る光ビームを第1受光部により受けた後、その受信信号に含まれる後記ずれ情報を抽出する第1受信信号処理手段と、
a3)該ずれ情報に基づいて第1送光部における光ビームの出射方向を調整する光ビーム調整手段と、
を備え、第2送受信装置は、
b1)第2受光部の受光面の手前にあって光軸を囲んで複数設けられた受光手段の出力に基づいて、前記第1送受信装置からの光ビームによる該第2受光部に対する入射光の方向のずれ量を検出するずれ検出手段と、
b2)該ずれ量を表すずれ情報を送信信号に含ませ、第2送光部により第1送受信装置に向けて光ビームを出射する第2送信信号処理手段と、
を備えることを特徴としている。
【0017】
【発明の実施の形態、及び効果】
第1発明に係る空間光通信システムでは、次のような手順により、第1及び第2光通信装置の間での通信経路を確立する。即ち、第1送受信装置において、光ビーム走査手段a1)は、第1送光部において光ビームの出射方向を所定の範囲内で走査する。その際に、第1送信信号処理手段a2)はそれぞれ時点での光の出射方向又はそれに相当する出射方向情報を送信信号に含ませる。従って、実際の光ビームの出射方向とその光ビームによる送信信号に含まれる出射方向情報が示す出射方向とは一致している。
【0018】
一方、第2送受信装置においては、第1送受信装置から送られて来る光ビームを第2受光部により受けて受信信号を取り出すが、上述したようにその光ビームは走査されているから、受信信号の大きさはその走査に伴って変動する。この受信信号が最大であるときに第1送受信装置における光ビームの出射方向は最適であると看做せるから、通信状態検出手段b1)は、光ビームの走査の過程において受信信号が最大又はそれに近い略最適な通信状態となる状態を検出する。第2受信信号処理手段b2)は、略最適な通信状態であるとされたときの受信信号に含まれる出射方向情報を取得する。この時点で、第1送受信装置における光ビームの最適出射方向が第2送受信装置において認識できる。
【0019】
次に、今度は第2送受信装置から第1送受信装置に向けて応答信号を送るべく、第2送信信号処理手段b3)は、その出射方向情報を最適出射方向情報として送信信号に含ませ、第2送光部により第1送受信装置に向けて光ビームを出射する。第1送受信装置では、上記のような光ビームの出射と並行して又は時分割で、第1受光部により第2送受信装置から送られて来る光ビームを受け、第1受信信号処理手段a3)はその受信信号に含まれる最適出射方向情報を抽出する。この時点で、第1送受信装置における光ビームの最適出射方向が、当該第1送受信装置においても認識できる。そこで、ビーム出射方向設定手段a4)は、その最適出射方向情報に基づいて、第1送光部における光ビームの出射方向を設定する。
【0020】
これにより、第1送受信装置から第2送受信装置に向けて小径の光ビームで信号を送る際の最適又はそれに近い状態の通信経路が確立できる。但し、この状態では第2送受信装置から第1送受信装置に向けて光信号を送る際の通信経路は最適又はそれに近い状態であるとは限らない(一般的にはそうでない)から、逆方向にも同様の動作を行うようにすることによって、双方向通信の際の通信経路を確立することができる。
【0021】
このように第1発明に係る空間光通信システムによれば、光ビームの径を小さくしても受光がほぼ最良となるようなビーム出射角度を迅速に確定し、空間内での良好な通信経路を確立することができる。従って、通信経路確立後に行うデータ通信の際には単位面積当たりの受光面で受ける受光強度が大きくなり、高いSN比を確保し易くなるとともに、或る程度のSN比を確保しつつ受光面積を小さくすることもできる。これによって、受光素子の接合容量の影響が小さくなり、応答の高速化が図れるため、通信速度を向上させることができる。
【0022】
なお、第1発明に係る空間光通信システムの好ましい一実施形態として、前記受光部は、2次元状に配置された複数の受光素子による受光信号を利用して2次元画像を取得する第1の動作モードと、前記複数の受光素子のうちの特定の1乃至複数の受光素子による受光信号のみを選択的に読み出すことにより高速の信号読み出しを行う第2の動作モードとの切り替えが可能であり、前記第1送受信装置にあって光ビーム走査手段は、第1受光部において第1の動作モードにより第2送受信装置の位置を検出した上で、その検出位置に基づいて光ビームの走査範囲を決める構成とすることができる。
【0023】
この構成によれば、予め相手側の送受信装置の位置をおおよそ特定した上で、その位置付近に対して光ビームの走査を実行すればよいので、光ビームの走査範囲をかなり絞ることができ、通信経路の確立を短時間で行うことができる。
【0024】
また、この場合、前記第2送受信装置にあって通信状態検出手段は、第2受光部において第1の動作モードにより第1送受信装置の位置を検出し、その検出位置に基づいて特定の受光素子を決定して第2の動作モードに切り替えた上で、通信状態の判定を行う構成とすることができる。
【0025】
第2発明に係る空間光通信システムでは、次のような手順により、第1及び第2送受信装置の間での通信経路を維持する。即ち、第1送光部により第1送受信装置から第2送受信装置に向けて光ビームが出射されている状態において、第2送受信装置では、ずれ検出手段b1)が、その光ビームによる該第2受光部に対する入射光の方向のずれ量を検出する。第2送信信号処理手段b2)は、定期的又は不定期的に上記ずれ量を表すずれ情報を送信信号に含ませ、第2送光部により第1送受信装置に向けて光ビームを出射する。従って、第2送受信装置から第1送受信装置に向けて送られる光ビームによる光信号には、少なくとも適宜の時点で、第1送受信装置の第1送光部と第2送受信装置の第2受光部とでの光線方向のずれ量を反映したずれ情報が含まれる。
【0026】
第1送受信装置では、光ビームの出射と並行して又は時分割で、第1受光部により第2送受信装置から送られて来る光ビームを受け、第1受信信号処理手段a1)はその受信信号に含まれるずれ情報を抽出する。この時点で、上記のような光線方向のずれ量が第1送受信装置においても認識できる。そこで、ビーム調整手段a2)は、そのずれ情報に基づいて第1送光部における光ビームの出射方向を調整する。これにより、第1送受信装置の第1送光部と第2送受信装置の第2受光部とで光線方向がほぼ一致し、第2受光部の受光面に対し最良の状態(一般には受光強度が最大になる状態)で光ビームが到達する。
【0027】
このように第2発明に係る空間光通信システムによれば、上述のようにして一旦、空間内での通信経経路が確立された後、温度等による機械的なドリフト要因などによって光線方向がずれてきた場合であっても、このずれを迅速に修正し、良好な通信状態を維持することができる。
【0028】
【実施例】
以下、本発明に係る空間光通信システムの一実施例について、図面を参照しつつ詳細に説明する。
【0029】
まず、本実施例による空間光通信システムに利用される受光センサの構成及び動作について、簡単に説明する。この受光センサは、上記非特許文献1や特願2002−58698号により、本願発明者が提案しているものである。図3は、この受光センサ100の内部構成の概略図である。
【0030】
イメージセル部101には、1画素を構成する単位セル102が2次元の行列状に多数配置されている。各単位セル102はそれぞれ受光素子としてホトダイオード(PD)を備えており、イメージセル部101に照射された光は各PDにより光電変換され、画素単位で電気信号を発生する。イメージセル部101には行デコーダ103、1Hメモリ104、メモリ制御部107が接続されている。行デコーダ103は列方向に配列された単位セル102を順次選択し、選択された単位セル102から垂直信号線(図示しない)への電気信号の読み出しを制御する。1Hメモリ104は、行デコーダ103により選択された単位セル102から読み出された電気信号を画素単位でサンプルホールドする。1Hメモリ104にホールドされた1水平ライン分の電気信号は、列デコーダ105の制御の下に1画素ずつ順次読み出され、アンプ106で増幅された後に画像信号として出力される。
【0031】
一方、メモリ制御部107は、各単位セル102に備えられるセル選択メモリへの選択制御データの書き込みを制御する。イメージセル部101からは出力信号線として2本(3本以上に拡張可能)の高速読み出し信号線108、109が引き出されており、それら高速読み出し信号線108、109はそれぞれ電流加算アンプ110、111を通して通信信号出力A、Bとして外部へと出力される。単位セル102は、上記PD及びセル選択メモリのほかに、PDで光電変換された電気信号(電荷)を蓄積し、その蓄積電荷信号を増幅する蓄積増幅器、PDで光電変換により生じた信号電流を蓄積することなく高速で電流増幅する電流増幅器、セル選択メモリに保持された制御データに応じて、後述のイメージセンサ動作モードに対応した電荷蓄積モードと高速通信動作モードに対応した電荷非蓄積モードとの切り替えを行う選択部などをを備える。
【0032】
次に、上記構成を有する受光センサ100の動作を説明する。この受光センサ100では、外部より供給される各種制御信号に応じて、イメージセンサ動作モード(第1の動作モード)と高速通信動作モード(第2の動作モード)との2つのモードでの動作が可能である。
【0033】
(1)イメージセンサ動作モード
一般的なCMOSイメージセンサと同様の読み出し動作を行うモードであって、電荷蓄積期間と信号読み出し期間とが時分割で設けられる。電荷蓄積期間において、イメージセル部101に何らかの2次元画像が投影されると、イメージセル部101に含まれる各単位セル102中のPDはその2次元画像のうちの微小領域に対応する光をそれぞれ受光し、その受光強度に応じた電荷を発生する。この信号電荷は時間の経過に伴って蓄積されるから、受光強度が微弱であっても、電荷蓄積期間を長くとることにより高いレベルの電気信号を得ることができる。所定の電荷蓄積期間が終了した後、信号読み出し期間に移行し、1Hメモリ104を介して、イメージセル部101に含まれる全ての画素に対応する電気信号が順次1画素ずつ画像信号出力として読み出される。この電気信号により2次元画像を構成することができる。
【0034】
(2)高速通信動作モード
イメージセル部101に含まれる単位セル102のうち、任意の1乃至複数の単位セル102のみを選択して、それら単位セル102のPDで光電変換により発生した信号電流を、蓄積することなく加算して外部へと出力する。単位セル102の選択は、メモリ制御部107からセル選択メモリへ書き込まれる選択制御データに応じて制御される。複数の単位セル102が選択された場合には、高速読み出し信号線108又は109に対し複数の単位セル102から同時に信号電流が出力され、その信号線108又は109上で電流が加算(合成)される。
【0035】
この高速通信動作モードでは、PDで発生した電気信号を積分することなく電流増幅器を介して出力するため、単位セル102毎の応答が非常に高速である。また、高速通信動作モードで動作する際のPDの実効的な容量は電流加算する画素数に依存するが、加算する最大画素数を制限することにより、実効的な容量を小さくして通信速度を優先することができる。また、イメージセル部101内で光が照射されていない領域の単位セル102におけるPDの暗電流や、それらPDに外乱光が照射されて生じる電気信号の影響を排除できるので、受光信号の純度が向上しSN比が改善できる。
【0036】
次に、上記受光センサ100を受光部に利用した、本実施例の空間光通信システムの一実施例について説明する。図4はこの空間光通信システムを構成するハブ3の要部のブロック構成図である。なお、ノード2の構成も基本的にはハブ3の構成と同様である。
【0037】
ハブ3は、送光部10として拡散出射光学系11と非拡散出射光学系12の2つの光学系を備える。拡散出射光学系11は光源としてLEDなどを含み、図示するように広い照射角度範囲に向けて光を出射する。一方、非拡散出射光学系12は、LEDなどの光源、複数のレンズ系のほか、MEMS(Micro Electro Mechanical Systems)デバイスなどで駆動される超小型ミラー13や2次元スキャンレンズ14などを含み、図示するように狭い照射角度範囲に向けて平行光に近い光径の小さな光を出射し、しかも、超小型ミラー13の回動によって、所定の範囲内で上記出射光の出射方向の調整が可能となっている。なお、周知のように、MEMSデバイスによれば出射光の方向調整は非常に高速で行える。また、受光部15は、入射光を集光するレンズ16と上述した構成の受光センサ17とを備える。
【0038】
電気系回路としては、受光センサ17からの画像信号出力を受ける画像処理部20、該画像処理部20で作成された画像に対して画像認識等の処理を施すことにより目的とするノード2(又はハブ3)の位置を検出する位置検出部21、受光センサ17からの通信信号出力を受けてデータ復調処理等を行って所望のデータを取り出す受信処理部22、上記送光部10の光源を駆動するとともに2つの出射光学系を切り替える機能を有する光源駆動部23、超小型ミラー13を駆動するミラー駆動制御部24、ネットワーク回線4(又は端末機器1)に接続されたインタフェイス部26を経て入力されて来るデータに対してデータ変調処理などを行って送信可能な形式に変換する送信処理部25と、上記各部の動作を制御する制御部27、などを備える。
【0039】
本実施例の空間光通信システムでは、拡散出射光学系11と非拡散出射光学系12とを使い分け、且つ受光センサ17を含む受信回路系では上記イメージセンサ動作モードと高速通信動作モードとを使い分けることにより、ハブ3とノード2との間での双方向通信を行う際の通信経路の確立動作を行う。次に、その点について詳細に説明する。
【0040】
図5及び図6は通信経路確立処理の動作手順を示すフローチャート、図7はハブ側でのスパイラルスキャン処理の動作手順を示すフローチャート、図8はノード側でのピーク検出処理の動作手順を示すフローチャート、図9はノード側でのスパイラルスキャン処理の動作手順を示すフローチャート、図10はハブ側でのピーク検出処理の動作手順を示すフローチャートである。また、図11はハブ3とノード2との間での光の照射状態を模式的に示す図、図12はノード側でのイメージセンサ動作モードの際に取得される2次元画像の一例を示す図、図13はスパイラルスキャンの際のビームの移動軌跡を模式的に示す図である。なお、以下の説明では、ハブ3側とノード2側とでの構成要素の符号を区別するために、ハブ3側は上記説明に使用した符号の後にhを付し、ノード2側は同じ符号の後にnを付す。
【0041】
まず、ハブ3側では、通信の相手先であるノード2に自らの位置を知らせるために、位置通知用拡散光点滅出射モードでの動作を実行する(ステップHS1)。即ち、制御部27hは、所定の周波数で点滅する(つまり強度変調された)拡散光を出射するように光源駆動部23hを制御する。これにより、図11(a)に示すように、拡散出射光学系11hにより、ハブ3からノード2の設置場所を含む広い範囲に広がる光が照射される。
【0042】
一方、ノード2側では、制御部27nはハブ3の位置を検出するために、受光センサ17nをイメージセンサ動作モードで動作させる(ステップNS1)。上述したように受光センサ17nの画像信号出力には、イメージセル部101で捉えられている2次元画像に対応する画素信号が順次出力される。画像処理部20nはこの画素信号を受けて、例えば図12に示すような2次元画像を作成する。該2次元画像内にはハブ3の投影像Phを含み、且つ、上記のようにハブ3から放射される拡散光は所定周波数で点滅しているから、位置検出部21はこのような2次元画像に対して画像認識処理を行うことにより、容易にハブ3の位置を検出することができる。
【0043】
この位置検出結果により、制御部27nはイメージセル部101においてハブ3の位置に対応した画素(単位セル102)の位置と数とをそれぞれ決定し、受光センサ17nに対し、選択された1乃至複数の単位セル102を高速通信動作モードで動作するように切り替える(ステップNS2)。これにより、ノード2側においてハブ3から送られて来る光を高速で受光する準備が整う。
【0044】
次いで、今度はノード2側において、通信相手先であるハブ3に自らの位置を知らせるために、位置通知用拡散光点滅出射モードでの動作を実行する(ステップNS3)。即ち、制御部27nは、所定周波数で点滅する拡散光を出射するように光源駆動部23nを制御する。これにより、図11(b)に示すように、ノード2からハブ3の設置場所を含む広い範囲に広がる拡散光が照射される。
【0045】
ハブ3側では、ノード2側のステップNS1、NS2と同様のステップHS2、HS3の処理により、受光センサ17hをイメージセンサ動作モードで動作させ、位置検出部21hはイメージセル部101で捉えた2次元画像に基づいてノード2の位置を検出する。そして、制御部27hは、イメージセル部101においてノード2の位置に対応した画素(単位セル)の位置と数とをそれぞれ決定し、受光センサ17hに対し、選択された1乃至複数の単位セル102を高速通信動作モードで動作するように切り替える。これにより、ハブ3側でもノード2から送られて来る光を高速で受光する準備が整う。
【0046】
その後、ハブ3側ではスパイラルスキャン処理を実行し(ステップHS4)、ノード2側ではピーク検出処理を実行する(ステップNS4)。即ち、ハブ3側では、非拡散出射光学系12hにより出射する小光径の光ビームの出射角度(θhx,θhy)をまず初期角度(θhx0,θhy0)に設定する(ステップS21)。この出射角度(θhx,θhy)が、ハブ3から出射されるビームの出射方向を決めるパラメータである。そして、超小型ミラー13hを制御してその方向へ光が照射されるようにミラー駆動制御部24hを制御し、拡散光に代えて、出射角度データ〔θhx,θhy〕を情報の一部として含むような信号光を送出する(ステップS24)。
【0047】
ここで、初期角度(θhx0,θhy0)の決め方の一例について説明する。そもそも、このような光ビームのスキャンを行うことによって最適な出射角度を決めるのは、上述したように2次元画像に基づいて検出したノード(ハブでも同様)の位置座標が或る程度の曖昧さを有しているためである。これは受光センサ17の1画素が見込む角度が有限であること等に由来する。従って、ビーム径がこの検出位置の曖昧さよりも小さい場合には、光ビームがレンズ16に入らない場合があり得る。そこで、この曖昧さを含む領域内で光ビームをスキャンして正確な出射角度を探索することが、スパイラルスキャン処理の意図である。
【0048】
一般に、拡散光を発しているハブ3の投影像Phは、図12にも示したように複数画素に跨って検出される。この場合、その光源位置座標(X,Y)は、それら複数の画素の重心(X’,Y’)で与えるのが妥当である。そこで、この重心(X’,Y’)を(X,Y)として次式に適用することにより、初期出射角度を求めることができる。
(θx,θy)=( arctan(Δx・X/f),arctan(Δy・Y/f) )
ここで、Δx×Δyは画素サイズ、fは撮像レンズの焦点距離である。但し、上記式は、画素サイズが有限であることに加え、受光側の結像レンズ16と送光側の2次元スキャンレンズ14との位置が異なることに起因する誤差を含む近似的な式である。
【0049】
ハブ3(ノード2でも同様)の制御部27hは、位置検出部21hで検出されたノードの位置に基づき、上記のような処理を実行することにより、適切な初期出射角度を算出することができる。これにより、図11(c)に示すように、ハブ3からノード2の方向に向けて、ほぼ平行光である光ビームが出射角度(θhx,θhy)で以て照射される。或る出射角度(θhx,θhy)の状態は、後述するようなノード2側でのピーク検出処理で1つの出射角度に対する処理を終了するのに要する時間を考慮して、その時間以上継続される。
【0050】
上記時間だけ或る出射角度で以て光ビームを放射した後、領域内スキャンを終了したか否かを判定し(ステップS25)、終了するまではステップS22へと進み、ピーク検出処理が終了しているか否かを判定する。図5及び図6のフローチャートではステップHS4のスパイラルスキャン処理の後にステップHS5のピーク検出処理を実行するようになっているが、実際には、スパイラルスキャン処理とほぼ同時にピーク検出処理は開始される。これは、スパイラルスキャン処理の開始直後にノード2側からの応答信号が到来する可能性があるからである。この点については後で詳述する。
【0051】
ステップS22でピーク検出処理が終了していると判定される場合には、既に最適なビーム出射角度が見い出されているか、或いは逆にタイムアウト等により適切なビーム出射角度が見つからないことが明確になっているかのいずれかであるから、スパイラルスキャン処理を終了する。一方、ステップS22でピーク検出処理が終了していないと判定された場合には、ビームの出射角度(θhx,θhy)を次の角度、即ち、図13に示したようにスパイラル状に移動する経路上の次の角度に更新し(ステップS23)、再びステップS24以降へと進む。ここでスパイラル状にスキャンする理由は、最も効率良くつまり短時間で最適出射角度を見つけることができると想定されるからであって、もちろんスキャンの順序や方向はこれに限るものではない。
【0052】
ステップS25で所定領域内のスキャンを終了したと判定された場合には、次に所定回数(例えば3回)のスキャンを終了したか否かを判定し(ステップS26)、未だ所定回数のスキャンを終了していなければステップS21へと戻り、出射角度を初期値に設定して新たなスキャンを実行する。従って、途中でピーク検出処理が終了するまで所定回数のスパイラルスキャンを繰り返し実行し、所定回数に達したときにスパイラルスキャン処理を終了することになる。
【0053】
一方、上記スパイラルスキャンによる光ビームを受けるノード2側では、光ビームがレンズ16nを経て受光センサ17nのイメージセル部101に照射される。上記のように高速通信動作モードに設定された1乃至複数個の単位セル102からの合算信号を取り出し、受信処理部22nはその信号レベルが所定の閾値以上であるか否かを判定する(ステップS31、S32)。信号レベルが閾値以上である場合には、受光信号に含まれる出射角度データ〔θhx,θhy〕を抽出するとともに(ステップS33)、信号レベルがそのピーク検出処理において過去に得られた信号レベルと比較して最大であるか否かを判定する(ステップS34)。最大である場合には上記ステップS33で抽出した出射角度データ〔θhx,θhy〕を仮の最適出射角度として(θhxb,θhyb)に上書き保存する(ステップS35)。そして、信号レベルが所定の処理終了閾値以上であるか否かを判定し(ステップS36)、処理終了閾値以上であればこのピーク検出処理を終了する。
【0054】
ステップS32で検出値が閾値以上でない、ステップS34で検出値が最大でない、又はステップS36で検出値が終了閾値以上でないと判断された場合、いずれもステップS37へと進み、処理開始から所定時間が経過したか否かを判定する。所定時間が経過していなければ上記ステップS31とへ戻るが、所定時間が経過している場合にはステップS38へと進み、最適出射角度(θhxb,θhyb)が得られたか否かを判定する。上記処理で1回でもステップS34からS35へと進めば最適出射角度(θhxb,θhyb)が得られるが、例えば信号レベルの検出値が常に閾値未満であるような場合には最適出射角度(θhxb,θhyb)が得られない。そこで、最適出射角度(θhxb,θhyb)が得られていなければピーク検出異常であると判断し(ステップS39)、例えば異常フラグを設定した上で処理を終了する。それ以外の場合には、ピーク検出処理の結果、最適出射角度(θhxb,θhyb)が検出されている筈である(ステップNS5)。
【0055】
次に、今度はノード2側において、上記ハブ3側と同様にしてスパイラルスキャン処理を実行する(ステップNS6)。上記ピーク検出処理が終了するとすぐにスパイラルスキャン処理が開始されるから、ピーク検出処理の開始直後に最適出射角度(θhxb,θhyb)が見い出された場合には、ハブ3側でのスパイラルスキャン処理の開始とノード2側でのスパイラルスキャン処理の開始とで時間遅れは非常に小さく、すぐに非拡散光である光ビームがノード2からハブ3へと送られ始める。これが、上述したように、ハブ3側でスパイラルスキャン処理と並行してピーク検出処理を実行する理由である。
【0056】
ノード2側におけるスパイラルスキャン処理の手順は図9のフローチャートに示すように、ハブ3側におけるスパイラルスキャン処理の手順(図7)とほほ同様である。異なる点は、光ビームの初期出射角度がノード2側での画像処理結果から求まったハブ3の検出位置に基づいて決められた角度(θnx0,θny0)であることと、送信信号に情報の一部として、その時点でのノード2からの光ビーム出射角度を表す角度データ〔θnx,θny〕のみならず、先に取得したハブ3側における最適出射角度を表す角度データ〔θhxb,θhyb〕も含むようにすることである。
【0057】
一方、ハブ3側ではステップHS5によりピーク検出処理が実行される。ハブ3側におけるピーク検出処理の手順は図10のフローチャートに示すように、ノード2側におけるピーク検出処理の手順(図8)とほほ同様である。異なる点は、2つの角度データ、〔θnx,θny〕及び〔θhxb,θhyb〕を取得することとである。このような処理により、多くの場合、ノード2側の最適出射角度(θnxb,θnyb)を取得することができ、並行して自らの最適出射角度(θhxb,θhyb)を認識することができる(ステップHS6)。
【0058】
最適出射角度(θhxb,θhyb)が得られたならば、ミラー駆動制御部24hを介して超小型ミラー13hを駆動し、光ビームの出射角度をその角度(θhxb,θhyb)に設定する。そして、今度は、送信処理部25hが角度データ〔θnxb,θnyb〕を情報の一部として送信信号に埋め込み、送光部10hはその送信信号を光ビームとしてノード2に向けて送出する(ステップHS7)。この光ビームを受け、ノード2側では、受信処理部25hが角度データ〔θnxb,θnyb〕を抽出することにより、自らの最適出射角度(θnxb,θnyb)を認識することができる(ステップNS7)。
【0059】
その後、ノード2側でも、ミラー駆動制御部24nを介して超小型ミラー13nを駆動し、光ビームの出射角度を(θnxb,θnyb)に設定した上で、所定の確認信号を送出する(ステップNS8)。ハブ3側では、所定のタイムアウト時間が経過するまで確認信号の到来を監視し(ステップHS8、HS9)、確認信号を受信したならば通信経路が確立したものと判断する。その一方、確認信号が来る前にタイムアウトに到った場合には通信経路の確立ができなかったものと判断する。
【0060】
このようにしてハブ3、ノード2の双方で互いに相手側から送られてくる光ビームの出射角度を確定することにより、両者の間で最良又はそれに近い状態の通信経路を確立することができるから、以降は、その状態で所望のデータ通信を開始すればよい。
【0061】
なお、通信を開始する前に上記のように通信経路を確立する動作を行うのはもちろんであるが、データ通信の途中で通信の途切れが或る時間継続した場合には、上記のような手順で通信経路の確立を再度試みるようにするとよい。即ち、データ通信中に通信の途切れが発生した場合、様々な原因が考えられるが、頻度の高い原因としては、光の遮蔽とノード2の移動(但し、固定設置でない場合)とが考え得る。光の遮蔽の場合、短時間の遮蔽であれば、そのまま待機していればすぐに通信を回復させることが可能であるが、ノード2が移動された場合には、光ビームの出射角度を設定し直す必要がある。この場合でも、上記処理を実行することによって、ノード2とハブ3とは互いに位置を検出し、通信を再開することができる。また、通信の途切れとは無関係に、一定時間間隔毎、或いはデータ通信の合間をぬって上記のような通信経路の確立動作を実行し、ノード2とハブ3とのそれぞれの位置を再確認するような制御を行ってもよい。
【0062】
上記説明はハブ3とノード2とが一対一に対応している場合の例であるが、1台のハブ3は複数のノード2に対して実質的に同時並行で通信を行うことが可能である。その場合には、各ノード2が存在する方向に対応してそれぞれ出射角度を決定した後、所定時間毎に超小型ミラー13を高速駆動することによって、時分割で通信を行うようにすればよい。もちろん、より高速に通信を行いたい場合には、ハブ側に、対応するノード2の数だけ非拡散出射光学系12を用意しておき、各ノード2の位置を検出した後に、それらノード2に向けて非拡散出射光学系12の出射角度をそれぞれ決めるようにするとよい。
【0063】
上記のように明らかにノード2が移動しない場合でも、例えば非拡散出射光学系12の超小型ミラー13のドリフト等の要因によって、光ビームの出射角度が時間経過や温度変化に伴って微妙にずれてくることがある。そこで、本実施例の空間光通信システムでは、こうした光ビームの出射角度の微妙なずれを調整するための手段を設けている。次に、この点について図14、15により説明する。図14は受光部におけるビームずれ検出機構の概略構成を示す図、図15は図14中のアパーチャ板30の正面図である。ここでは、ハブ3からノード2に向けて放射する光ビームの出射角度のずれを修正する場合を例に挙げて説明するが、ノード2からハブ3に向けて放射する光ビームの出射角度のずれを修正する場合も全く同様である。
【0064】
図14、図15に示すように、ノード2の受光部15nのレンズ16nの絞り面には、中心に光を通過する円形状の開口部31を穿設したアパーチャ板30を設置している。開口部31の周囲には、略90°間隔で4つに分割されたホトダイオード32a、32b、32c、32dが配置されている。この4個のホトダイオード32a、32b、32c、32dの検出出力はずれ量算出部33に入力されており、4つの信号に対して所定の演算処理を行うことにより光ビームのずれ量を算出する。
【0065】
即ち、ハブ3から送られて来る光ビームがレンズ16nの入射瞳の略中心に来るように入射している場合、光ビームは完全に開口部31を通過し、受光センサ17nの受光面に当たる。その状態からハブ3の送光部10hで出射角度がずれると、アパーチャ板30上では光ビームの照射範囲が開口部31を外れ、1乃至複数のホトダイオード32に光ビームの一部が入射する。そのため、ホトダイオード32ではその入射光量に応じた電気信号が発生する。例えば図15の例では、ホトダイオード32dにのみ電気信号が発生する。
【0066】
入射光の空間分布がガウス分布に従うものと仮定すると、開口部31の中心からの光ビームのずれ量(x0,y0)は次式で与えられる。
x0≒(w2/4b)・{(ix−i−x )/i0}
y0≒(w2/4b)・{(iy−i−y )/i0}
ここで、bはホトダイオードの位置(中心からの距離) 、wはビーム径、ix、i−x、iy、i−yは4個のホトダイオードによる受光強度信号、i0は入射光強度である。ずれ量算出部33は、例えばこうした式に基づく計算アルゴリズムに従って、ホトダイオード32a〜32dから入力された受光強度信号を演算処理し、ビームのずれ量を算出する。
【0067】
図示しないものの、上述のようにして算出されたずれ量はノード2の送信処理部25nへと時々刻々と送られ、送信処理部25nは一定間隔毎又は不定期に(例えばずれ量が大きく変化したときに)、送信信号の情報の一部にずれ量データを載せる。これにより、ずれ量は上記ビームを出射したハブ3側へとフィードバックされることになるから、ハブ3側の受信処理部22hは受信信号からずれ量データを抽出し、ミラー駆動制御部24はそのずれを修正するように超小型ミラー13nを調整する。その結果、送光部10hの非拡散出射光学系12hから出射される光ビームの出射角度が修正され、ノード2の受光部15では光ビームが開口部31を完全に通過して受光センサ17nに到達する。
【0068】
なお、上記説明は、ビーム径がレンズ16の径よりも小さい場合を想定しているが、ビーム径がレンズ径に比べて充分に大きい場合には、レンズ16の入射面にアパーチャ板30を設置する構成としてもよい。
【0069】
なお、第1及び第2発明に係る空間光通信システムは必ずしも双方向に光通信を行うものだけでなく、一方向のみに光通信を行うものにも適用が可能である。また、上記実施例は本発明の一例にすぎず、本発明の趣旨の範囲で適宜変形、修正、追加等を行っても本願特許請求の範囲に包含されることは明らかである。
【図面の簡単な説明】
【図1】本発明の適用対象である空間光通信システムの典型的な構成の一例の概略図。
【図2】図1に示した空間光通信システムで従来の一般的な通信時における光の照射状態を模式的に示した図。
【図3】本実施例の空間光通信システムで使用される受光センサの内部構成の概略図。
【図4】本実施例の空間光通信システムにおけるハブ(又はノード)の要部のブロック構成図。
【図5】本実施例の空間光通信システムにおいて通信経路確立処理の動作手順を示すフローチャート。
【図6】本実施例の空間光通信システムにおいて通信経路確立処理の動作手順を示すフローチャート。
【図7】本実施例の空間光通信システムにおいてハブ側でのスパイラルスキャン処理の動作手順を示すフローチャート。
【図8】本実施例の空間光通信システムにおいてノード側でのピーク検出処理の動作手順を示すフローチャート。
【図9】本実施例の空間光通信システムにおいてノード側でのスパイラルスキャン処理の動作手順を示すフローチャート。
【図10】本実施例の空間光通信システムにおいてハブ側でのピーク検出処理の動作手順を示すフローチャート。
【図11】本実施例の空間光通信システムにおいてハブとノードとの間での光の照射状態を模式的に示す図。
【図12】本実施例の空間光通信システムにおいてノード側でのイメージセンサ動作モードの際に取得される2次元画像の一例を示す図。
【図13】本実施例の空間光通信システムにおいてスパイラルスキャンの際のビームの移動軌跡を模式的に示す図。
【図14】本実施例の空間光通信システムにおいて受光部でのビームずれ検出機構の概略構成を示す図。
【図15】図14中のアパーチャ板の概略正面図。
【符号の説明】
1…端末機器
2…ノード
3…ハブ
4…ネットワーク回線
10…送光部
11…拡散出射光学系
12…非拡散出射光学系
13…超小型ミラー
14…2次元スキャンレンズ
15…受光部
16…レンズ
17…受光センサ
20…画像処理部
21…位置検出部
22…受信処理部
23…光源駆動部
24…ミラー駆動制御部
25…送信処理部
26…インタフェイス部
27…制御部
30…アパーチャ板
31…開口部
32…ホトダイオード
33…ずれ量算出部
Claims (4)
- 共に送光部及び受光部を具備する第1及び第2の送受信装置を含み、一方の送受信装置の送光部から他方の送受信装置の受光部に向けて小径の光ビームを放射して双方向に光通信を行う空間光通信システムにおいて、
第1送受信装置は、
a1)第1送光部において光ビームの出射方向を走査する光ビーム走査手段と、
a2)その光ビーム走査時に、当該時点での光の出射方向又はそれに相当する出射方向情報を送信信号に含ませる第1送信信号処理手段と、
a3)前記走査された光ビームに応答して第2送受信装置から送られて来る光ビームを第1受光部により受けた後、その受信信号に含まれる後記最適出射方向情報を抽出する第1受信信号処理手段と、
a4)その最適出射方向情報に基づいて第1送光部における光ビームの出射方向を設定するビーム出射方向設定手段と、
を備え、第2送受信装置は、
b1)前記第1送受信装置から送られて来る前記走査された光ビームを第2受光部により受け、その受信信号が最大又はそれに近い略最適な通信状態となる状態を検出する通信状態検出手段と、
b2)前記略最適な通信状態であるとされたときの受信信号に含まれる前記出射方向情報を取得する第2受信信号処理手段と、
b3)前記取得された出射方向情報を最適出射方向情報として送信信号に含ませ、前記第2送光部により第1送受信装置に向けて光ビームを出射する第2送信信号処理手段と、
を備えることを特徴とする空間光通信システム。 - 前記受光部は、2次元状に配置された複数の受光素子による受光信号を利用して2次元画像を取得する第1の動作モードと、前記複数の受光素子のうちの特定の1乃至複数の受光素子による受光信号のみを選択的に読み出すことにより高速の信号読み出しを行う第2の動作モードとの切り替えが可能であり、前記第1送受信装置にあって光ビーム走査手段は、第1受光部において第1の動作モードにより第2送受信装置の位置を検出した上で、その検出位置に基づいて光ビームの走査範囲を決めることを特徴とする請求項1に記載の空間光通信システム。
- 前記第2送受信装置にあって通信状態検出手段は、第2受光部において第1の動作モードにより第1送受信装置の位置を検出し、その検出位置に基づいて特定の受光素子を決定して第2の動作モードに切り替えた上で、通信状態の判定を行うことを特徴とする請求項2に記載の空間光通信システム。
- 共に送光部及び受光部を具備する第1及び第2の送受信装置を含み、一方の送受信装置の送光部から他方の送受信装置の受光部に向けて小径の光ビームを放射して双方向に光通信を行う空間光通信システムにおいて、
第1送受信装置は、
a1)第1送光部により当該第1送受信装置から第2送受信装置に向けて出射された光ビームに対応して、該第2送受信装置から送られて来る光ビームを第1受光部により受けた後、その受信信号に含まれる後記ずれ情報を抽出する第1受信信号処理手段と、
a3)該ずれ情報に基づいて第1送光部における光ビームの出射方向を調整する光ビーム調整手段と、
を備え、第2送受信装置は、
b1)第2受光部の受光面の手前にあって光軸を囲んで複数設けられた受光手段の出力に基づいて、前記第1送受信装置からの光ビームによる該第2受光部に対する入射光の方向のずれ量を検出するずれ検出手段と、
b2)該ずれ量を表すずれ情報を送信信号に含ませ、第2送光部により第1送受信装置に向けて光ビームを出射する第2送信信号処理手段と、
を備えることを特徴とする空間光通信システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003021133A JP2004235899A (ja) | 2003-01-29 | 2003-01-29 | 空間光通信システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003021133A JP2004235899A (ja) | 2003-01-29 | 2003-01-29 | 空間光通信システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004235899A true JP2004235899A (ja) | 2004-08-19 |
Family
ID=32950552
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003021133A Pending JP2004235899A (ja) | 2003-01-29 | 2003-01-29 | 空間光通信システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004235899A (ja) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006013755A1 (ja) * | 2004-08-05 | 2006-02-09 | Japan Science And Technology Agency | 空間光通信を用いた情報処理システム及び空間光通信システム |
| JP2007027837A (ja) * | 2005-07-12 | 2007-02-01 | Sharp Corp | 光信号受信装置、その装置を有する携帯情報通信端末およびその端末を有する光信号通信システム |
| JP2007288552A (ja) * | 2006-04-18 | 2007-11-01 | Taiko Denki Co Ltd | 空間光通信用受光装置 |
| US7502053B2 (en) | 2005-07-29 | 2009-03-10 | Japan Science And Technology Agency | Information-processing device and information-processing system |
| JP2009194633A (ja) * | 2008-02-14 | 2009-08-27 | Mega Chips Corp | 固体撮像セルおよび光起電力装置および機器 |
| KR101461674B1 (ko) * | 2008-02-22 | 2014-11-14 | 삼성전자주식회사 | 가시광 통신 시스템에서 트래킹 장치 및 방법 |
| JP2015065492A (ja) * | 2013-09-24 | 2015-04-09 | 国立大学法人佐賀大学 | 光空間通信システム |
| JP2016039464A (ja) * | 2014-08-06 | 2016-03-22 | 公立大学法人岩手県立大学 | 通信システム及びそれを用いた移動装置 |
| GB2551355A (en) * | 2016-06-13 | 2017-12-20 | Bae Systems Plc | Optical communication device |
| US10601506B2 (en) | 2016-06-13 | 2020-03-24 | Bae Systems, Plc | Optical communication device |
| WO2023047447A1 (ja) * | 2021-09-21 | 2023-03-30 | 日本電気株式会社 | 通信制御装置、通信装置、通信制御方法、および記録媒体 |
| JP2024513217A (ja) * | 2021-04-01 | 2024-03-22 | フラウンホファー ゲセルシャフト ツール フェールデルンク ダー アンゲヴァンテン フォルシュンク エー.ファオ. | ビーム方向構成を送信または受信するための装置および方法 |
| WO2024098773A1 (zh) * | 2022-11-10 | 2024-05-16 | 华为技术有限公司 | 通信方法、装置、系统及存储介质 |
-
2003
- 2003-01-29 JP JP2003021133A patent/JP2004235899A/ja active Pending
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006013755A1 (ja) * | 2004-08-05 | 2006-02-09 | Japan Science And Technology Agency | 空間光通信を用いた情報処理システム及び空間光通信システム |
| US7715723B2 (en) | 2004-08-05 | 2010-05-11 | Japan Science And Technology Agency | Information-processing system using free-space optical communication and free-space optical communication system |
| JP2007027837A (ja) * | 2005-07-12 | 2007-02-01 | Sharp Corp | 光信号受信装置、その装置を有する携帯情報通信端末およびその端末を有する光信号通信システム |
| US7502053B2 (en) | 2005-07-29 | 2009-03-10 | Japan Science And Technology Agency | Information-processing device and information-processing system |
| JP2007288552A (ja) * | 2006-04-18 | 2007-11-01 | Taiko Denki Co Ltd | 空間光通信用受光装置 |
| JP2009194633A (ja) * | 2008-02-14 | 2009-08-27 | Mega Chips Corp | 固体撮像セルおよび光起電力装置および機器 |
| KR101461674B1 (ko) * | 2008-02-22 | 2014-11-14 | 삼성전자주식회사 | 가시광 통신 시스템에서 트래킹 장치 및 방법 |
| JP2015065492A (ja) * | 2013-09-24 | 2015-04-09 | 国立大学法人佐賀大学 | 光空間通信システム |
| JP2016039464A (ja) * | 2014-08-06 | 2016-03-22 | 公立大学法人岩手県立大学 | 通信システム及びそれを用いた移動装置 |
| GB2551355A (en) * | 2016-06-13 | 2017-12-20 | Bae Systems Plc | Optical communication device |
| US10601506B2 (en) | 2016-06-13 | 2020-03-24 | Bae Systems, Plc | Optical communication device |
| GB2551355B (en) * | 2016-06-13 | 2021-11-10 | Bae Systems Plc | Optical communication device |
| JP2024513217A (ja) * | 2021-04-01 | 2024-03-22 | フラウンホファー ゲセルシャフト ツール フェールデルンク ダー アンゲヴァンテン フォルシュンク エー.ファオ. | ビーム方向構成を送信または受信するための装置および方法 |
| JP7673232B2 (ja) | 2021-04-01 | 2025-05-08 | フラウンホファー ゲセルシャフト ツール フェールデルンク ダー アンゲヴァンテン フォルシュンク エー.ファオ. | ビーム方向構成を送信または受信するための装置および方法 |
| US12574099B2 (en) | 2021-04-01 | 2026-03-10 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Apparatus and method for transmitting or receiving a beam direction configuration |
| WO2023047447A1 (ja) * | 2021-09-21 | 2023-03-30 | 日本電気株式会社 | 通信制御装置、通信装置、通信制御方法、および記録媒体 |
| JPWO2023047447A1 (ja) * | 2021-09-21 | 2023-03-30 | ||
| JP7687418B2 (ja) | 2021-09-21 | 2025-06-03 | 日本電気株式会社 | 通信制御装置、通信装置、通信制御方法、およびプログラム |
| WO2024098773A1 (zh) * | 2022-11-10 | 2024-05-16 | 华为技术有限公司 | 通信方法、装置、系统及存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2004235899A (ja) | 空間光通信システム | |
| JP7146004B2 (ja) | 同期スピニングlidarおよびローリングシャッターカメラシステム | |
| JP3995959B2 (ja) | 空間光通信用センサ、空間光通信用受信装置、及び該受信装置を含む空間光通信システム | |
| FI115264B (fi) | Langaton tehonsiirto | |
| CN113640815B (zh) | 激光雷达及其探测装置 | |
| WO2018057100A1 (en) | Controllable selection of light-capture devices | |
| JP2017516347A (ja) | 光基準通信におけるラスター線アライメントのための技術 | |
| JP2007279017A (ja) | レーダ装置 | |
| JP5257477B2 (ja) | 光空間通信装置およびその通信方法ならびに光空間通信システム | |
| JP6287092B2 (ja) | 情報処理装置および情報処理方法、撮像システム、並びにプログラム | |
| EP4183064A1 (en) | An optical wireless communication receiving unit, system and method | |
| JP2014524101A (ja) | カメラ、光センサ、及び、拡張情報ディスプレイを含む符号化光検出システム | |
| CN111971576A (zh) | 宏观的激光雷达设备 | |
| JP3823976B2 (ja) | 光無線伝送システム及び光無線伝送装置 | |
| EP0881788A2 (en) | Optical receiver and related optical wireless transmission system | |
| US20040227108A1 (en) | Wireless surveillance system | |
| EP4393085B1 (en) | A flexible backbone network for high-speed optical wireless communication | |
| CN207096443U (zh) | 适用于激光雷达的dlp信号接收系统 | |
| JP3706487B2 (ja) | 光空間伝送装置 | |
| WO2020213564A1 (ja) | 放射線撮像装置、放射線撮像システム、及び放射線撮像装置の制御方法 | |
| JP3928860B2 (ja) | 端末側光無線伝送装置 | |
| US20020113910A1 (en) | Apparatus and method for controlling convergence in projection television | |
| EP1777844A1 (fr) | Système de communication par liaison optique multiutilisateur, terminal multiutilisateur et procédé de communication associés | |
| JP2004173090A (ja) | 光到来方向検出装置及び光無線受信装置 | |
| JP2004135326A (ja) | 光無線伝送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080129 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080527 |