JP2004239146A - エンジンの吸気制御装置 - Google Patents
エンジンの吸気制御装置 Download PDFInfo
- Publication number
- JP2004239146A JP2004239146A JP2003028438A JP2003028438A JP2004239146A JP 2004239146 A JP2004239146 A JP 2004239146A JP 2003028438 A JP2003028438 A JP 2003028438A JP 2003028438 A JP2003028438 A JP 2003028438A JP 2004239146 A JP2004239146 A JP 2004239146A
- Authority
- JP
- Japan
- Prior art keywords
- compression ratio
- engine
- intake
- correction
- variable
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/12—Improving ICE efficiencies
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
Landscapes
- Output Control And Ontrol Of Special Type Engine (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
【課題】可変圧縮比機構を備えたエンジンで、アイドル時の目標エンジン回転速度への制御性能を向上する。
【解決手段】エンジン運転状態に基づいて設定した目標圧縮比に圧縮比を操作しつつ(S1,S2)、アクセル開度に基づいてスロットル開口面積の基本値を算出し(S3)、アイドル時目標回転速度と圧縮比から第1の補正値を算出し(S4)、補機作動状態信号及び変速位置信号から第2の補正値を算出し(S5)、アイドル時目標回転速度と実回転速度の偏差から第3の補正値を算出し(S6)、これら第1〜第3の補正値により前記基本値を補正して算出したスロットル開口面積となるように制御する(S7〜S10)。
【選択図】 図6
【解決手段】エンジン運転状態に基づいて設定した目標圧縮比に圧縮比を操作しつつ(S1,S2)、アクセル開度に基づいてスロットル開口面積の基本値を算出し(S3)、アイドル時目標回転速度と圧縮比から第1の補正値を算出し(S4)、補機作動状態信号及び変速位置信号から第2の補正値を算出し(S5)、アイドル時目標回転速度と実回転速度の偏差から第3の補正値を算出し(S6)、これら第1〜第3の補正値により前記基本値を補正して算出したスロットル開口面積となるように制御する(S7〜S10)。
【選択図】 図6
Description
【0001】
【発明の属する技術分野】
本発明は、圧縮比を可変制御するエンジンにおいてアイドル時の吸気量を制御する技術に関する。
【0002】
【従来の技術】
車両用エンジンでは、一般にアイドル時のエンジン回転速度を目標エンジン回転速度に制御している。
【0003】
具体的には、アクセル開度に応じて算出したスロットル開口面積の基本値を、目標エンジン回転速度から求めたフィードフォワード補正値と、目標エンジン回転速度と実エンジン回転速度との偏差から算出したフィードバック補正量とに基づいて補正し、最終的な目標スロットル開口面積に従ってスロットル弁を操作するものがある(特許文献1参照)。
【0004】
一方、エンジンの圧縮比を可変とし、運転状態に応じて、エンジン性能にとって適切な圧縮比に制御する可変圧縮比エンジンが開示されている。このものでは、低負荷運転状態では、熱効率の向上を目的として圧縮比を高くするが、高負荷運転状態では、ノックが発生しないように圧縮比を低くしている(特許文献2参照)。
【0005】
【特許文献1】
特開平11−287142号公報
【特許文献2】
特開平7−229431号公報
【0006】
【発明が解決しようとする課題】
しかしながら、後者の可変圧縮比エンジンの制御装置において、前者のアイドル回転速度制御を行った場合、以下のような問題がある。
【0007】
アイドル回転速度制御を行う場合のエンジン負荷は低いので、通常の圧縮比設定は高圧縮比であるが、高負荷運転状態からアイドル状態への移行直後は、圧縮比の応答遅れによって、実際の圧縮比は高くなりきっていない可能性がある。また、可変圧縮比機構の保護等のために、高圧縮比にすることが禁止されている場合もある。
【0008】
このような場合に、アイドル回転速度制御を行うと、通常の設定よりも低圧縮比であることによって、同じスロットル開度に対して発生するエンジントルクが小さいため、前記フィードフォワード補正値によって算出する補正スロットル開度が不足気味となり、フィードバック制御によって、定常的には、目標とするエンジン回転速度を実現できても、過渡的な収束性が悪くなることがあった。
【0009】
本発明は、このような従来の課題に着目してなされたもので、アイドル時に圧縮比制御の遅れに見合うように吸入新気量を補正制御することにより、応答性良く目標エンジン回転速度に収束できるようにすることを目的とする。
【0010】
【課題を解決するための手段】
このため本発明は、圧縮比を可変制御するエンジンにおいて、アイドル時に目標エンジン回転速度に制御するときに、吸入新気量可変機構の制御量を実圧縮比に基づいて補正する構成とした。
【0011】
これにより、アイドル時に圧縮比可変機構で制御される圧縮比の制御応答遅れに見合うように吸入新気量可変機構の制御量が補正されて吸入新気量を実圧縮比に適合するように補正制御することができるので、エンジン回転速度を目標エンジン回転速度に速やかに収束させることができる。
【0012】
【発明の実施の形態】
以下に、本発明の実施形態を図に基づいて説明する。
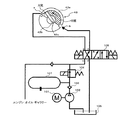
図1は、可変圧縮比機構ともなる複リンク式ピストン−クランク機構を備えたエンジンの全体図である。
【0013】
クランク軸31は、複数のジャーナル部32とクランクピン部33とカウンタウエィト部31aとを備えており、エンジン本体となる図示しないシリンダブロックの主軸受に、ジャーナル部32が回転自在に支持されている。前記クランクピン部33は、ジャーナル部32から所定量偏心しており、ここに第2リンクとなるロアーリンク34が回転自在に連結されている。
【0014】
前記ロアーリンク34は、略T字形をなすもので、その本体34aとキャップ34bとから分割可能に構成された略中央の連結孔に前記クランクピン部33が嵌合している。
【0015】
第1リンクとなるアッパーリンク35は、下端側が連結ピン36によりロアーリンク34の一端に回動可能に連結され、上端側がピストンピン37によりピストン38に回動可能に連結されている。前記ピストン38は、燃焼圧力を受け、シリンダブロックのシリンダ39内を往復動する。
【0016】
前記シリンダ39の上部には、クランク軸31の回転に同期して吸気ポート44を開閉する吸気弁43と、同じくクランク軸31の回転に同期して排気ポート46を開閉する排気弁45と、が配置されている。
【0017】
第3リンクとなる制御リンク40は、上端側が連結ピン41によりロアーリンク34の他端に回動可能に連結され、下端側が制御軸42を介してエンジン本体例えばシリンダブロックの適宜位置に回動可能に連結されている。詳しくは、制御軸42は、小径部42bを中心として回転するようにエンジン本体に支持されており、この小径部42bに対し偏心している大径部42aに、前記制御リンク40下端部が回転可能に嵌合している。
【0018】
前記小径部42bは、圧縮比制御アクチュエータ43によって回動位置が制御される。小径部42bが回動すると小径部42bに対して偏心している大径部42aの軸中心位置、特に、エンジン本体に対する相対位置が変化する。これにより、制御リンク40の下端の揺動支持位置が変化する。そして、前記制御リンク40の揺動支持位置が変化すると、ピストン38の行程が変化し、ピストン上死点(TDC)におけるピストン38の位置が上下する(つまり図1のy座標が大きく)。これにより、エンジン圧縮比を変えることが可能となる。前記圧縮比制御アクチュエータ43は、制御リンク40から加わる反力に抗して、任意の回動位置で小径部42bを保持することができるようになっている。圧縮比制御アクチュエータ43としては、油圧ベーン式アクチュエータを用いる。
【0019】
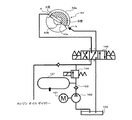
図2〜図4は、該圧縮比制御アクチュエータ43を制御する油圧システムを示す。図において、圧縮比制御アクチュエータ43は、ハウジング43a内に前記小径部42bに連結された駆動軸43b及び該駆動軸43bに固定されてハウジング43a内を容積可変なA室とB室とに仕切るベーン43cが回動自由に収納される。一方、電動モータ101で駆動されるオイルポンプ102の吐出口が、逆止弁103、開閉弁104、方向切換弁105のポートcに接続され、該方向切換弁105のポートdが低圧側のオイルパン106に接続される。また、前記方向切換弁105のポートe、fが、それぞれ前記圧縮比制御アクチュエータ43のポートa、bに接続される。また、前記逆止弁103と開閉弁104との間から分岐するオイル通路にアキュームレータ107が接続され、開閉弁104と方向切換弁105との間から分岐するオイル通路がエンジンオイルギャラリーに接続される。
【0020】
そして、図2の状態では前記開閉弁104が開、方向切換弁105が図示左端に制御され、オイルポンプ102から吐出された高圧油は、開閉弁104、方向切換弁105のポートc、eを介して前記圧縮比制御アクチュエータ43のポートaからA室に供給され、B室内の油は、ポートbから方向切換弁105のポートf、dを介してオイルパン106に戻される。これにより、A室の容積が増大してベーン43cと共に小径部42bが図で時計回りに回動し、制御リンク40の揺動支持位置が変化して低圧縮比に制御される。
【0021】
一方、上記状態から図3に示すように、方向切換弁105を図示右端に切換制御すると、高圧油は、開閉弁104のポートc、fを介して前記圧縮比制御アクチュエータ43のポートbからB室に供給され、A室内の油は、ポートaから方向切換弁105のポートe、dを介してオイルパン106に戻される。これにより、B室の容積が増大してベーン43cと共に小径部42bが図で反時計回りに回動し、制御リンク40の揺動支持位置が変化して高圧縮比に制御される。高圧縮比側に保持する場合は、図4に示すように、方向切換弁105を図示中央に移動させると共に、開閉弁104を閉とする。
【0022】
図1に戻って、このエンジンは、過給機としてターボ過給機51を備えている。このターボ過給機51は、排気通路54に位置するタービン52と吸気通路55に位置するコンプレッサ53とを同軸状に配置した構成であり、運転条件に応じて過給圧を制御するために、タービン52の上流側から排気の一部をバイパスさせる排気バイパス弁56を備えている。
【0023】
また、前記コンプレッサ53下流の吸気通路55に吸入新気量を可変制御するスロットル弁57を備え、該スロットル弁57がステップモータなどのスロットルアクチュエータ58により駆動される。
【0024】
また、前記排気通路54のエンジン本体とタービン52との間から分岐してスロットル弁57下流の吸気通路55に接続するEGR通路59と、該EGR通路59に介装されたEGR弁60とが設けられている。
【0025】
前記EGR弁60は、例えば、ステップモータを用いた電子制御式のものであり、その開度に応じて吸気側に還流する排気の量、すなわち、エンジン本体に吸入されるEGR量を制御する。
【0026】
エンジン運転状態を検出するセンサ類として、ドライバにより操作されるアクセル開度を検出するアクセル開度センサ61、エンジン回転速度を検出する回転速度センサ62、スロットル弁57上流の過給圧を検出する過給圧センサ63、実圧縮比を検出する圧縮比センサ64、エンジン冷却水温度を検出する水温センサ65、ノッキングを検出するノッキングセンサ66が設けられ、これらセンサ類からの検出信号は、エンジンコントロールユニット(ECU)67に入力される。
【0027】
かかる構成のエンジンにおいて、前記ECU67は、各種エンジン制御(燃料噴射制御、点火制御等)と共に、前記可変圧縮比機構による圧縮比の制御及びこれにより制御される実圧縮比に応じた前記スロットル弁57の開度制御を以下のように実行する。
【0028】
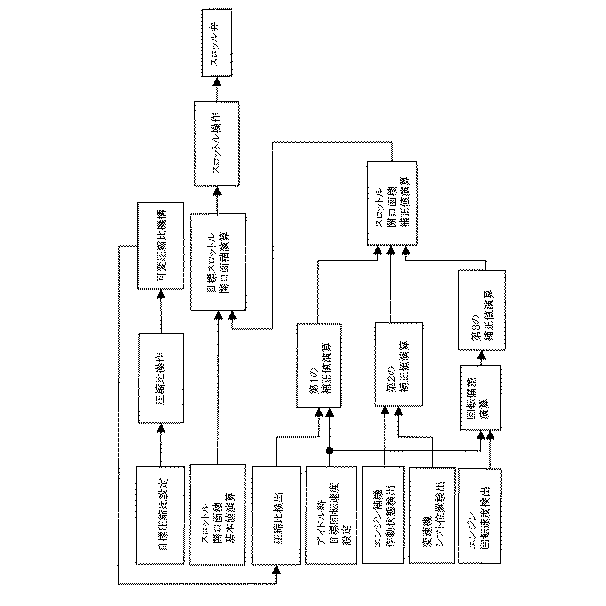
図5は、第1の実施形態における前記スロットル弁制御の制御ブロック、図6はメインフローを示す。
図6において、ステップ1では、アクセル開度とエンジン回転速度とに基づいて、図7に示したマップにより目標圧縮比を設定する。具体的には、アクセル開度に応じた要求エンジン負荷が大きくなるほどノッキング発生傾向が増大するのでノッキング抑制のため圧縮比を小さくするが、高回転領域では充填効率が低下するので少し圧縮比を大きめに設定する。
【0029】
ステップ2では、設定された目標圧縮比となるように前記可変圧縮比機構を駆動する。
ステップ3では、アクセル開度に応じて要求エンジン負荷に見合ったスロットル開口面積の基本値(基本制御量)bTVOを、図8に示したマップにより設定する。
【0030】
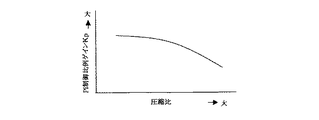
ステップ4では、アイドル時目標エンジン回転速度と圧縮比から図9に示したマップにより、前記スロットル開口面積の基本値に対するフィードフォワード補正量として第1の補正値hTVO1を設定する。具体的には、目標回転速度の増大に応じて要求出力が増大するので第1の補正値hTVO1を大きくすることは従来同様であるが、可変圧縮比機構の制御応答遅れ等によって圧縮比が小さいときは、同一のスロットル開口面積に対して発生するエンジントルクが小さいため、第1の補正値hTVO1を大きくし、圧縮比が大きくなって定常時の高圧縮比に近づくほど第1の補正値hTVO1を小さくする。
【0031】
ステップ5では、前記スロットル開口面積の基本値に対する外部負荷の大きさに応じたフィードフォワード補正量として、補機作動状態信号と変速シフト位置信号から第2の補正値hTVO2を算出する。具体的には、以下のように算出する。
【0032】
hTVO2=SWac+SWrf+SWshift・・・(1)
式(1)において、エアコンリレーがONのエアコン作動状態では、
SWac=CONSTac、但し、
エアコンリレーがOFFのエアコン非作動状態では、
SWac=0
ラジエータファンリレーがONのラジエータファン作動状態では、
SWRF=CONSTrf
ラジエータファンリレーがOFFのラジエータファン非作動状態では、
SWrf=0
パワーステアリングスイッチがONのパワーステアリング非作動状態では、
SWps=CONSTps
パワーステアリングスイッチがOFFのパワーステアリング非作動状態では、
SWps=0
変速位置がDレンジでは、
SWshift=CONSTd
変速位置がRレンジでは、
SWshift=CONSTr
変速位置がNレンジまたはPレンジでは、
SWshift=0
ただし、
CONSTac:エアコン対応補正量
CONSTrf:ラジエータファン対応補正量
CONSTps:パワーステアリング対応補正量
CONSTd:Dレンジ対応補正量
CONSTr:Rレンジ対応補正量
ステップ6では、アイドル時目標回転速度tNeidleと実エンジン回転速度Neとの回転偏差ΔNeを次式により算出する。
【0033】
ΔNe=tNeidle−Ne・・・(2)
ステップ7では、前記回転偏差ΔNeに基づいて、第3の補正値hTVO3を以下のように算出する。
【0034】
hTVO3=hTVOp+Ki×hTVOi・・・(3)
hTVOp=Kp×ΔNe・・・(4)
hTVOi=z−1−hTVOi+(ΔNe×Δt)・・・(5)
但し、
Kp:PI制御比例ゲイン
Ki:PI制御積分ゲイン
Δt:サンプリング時間
z−1:1演算遅れを表わす演算子
ステップ8では、以上のようにして算出した第1の補正値hTVO1、第2の補正値hTVO1、第3の補正値hTVO1から、スロットル開口面積の総補正値hTVOを次式のように算出する。
【0035】
hTVO=hTVO1+hTVO2+hTVO3・・・(6)
ステップ9では、前記スロットル開口面積の基本値bTVOと、前記総補正値hTVOとに基づいて、スロットル目標開口面積tTVOを次式のように算出する。
【0036】
tTVO=bTVO+hTVO・・・(7)
ステップ10では、上記にようにして算出された目標スロットル開口面積となるようにスロットル弁を操作する。
【0037】
図10は、上記第1実施形態のアイドル時における動作を示す。アクセル開度の減少に追従して設定されるスロットル開口面積の基本値が、前記第1の補正量hTVOを含む総補正量で補正されるが、本実施形態では、該第1の補正量が目標エンジン回転速度と共に実圧縮比に基づいて補正して設定されるので、実圧縮比が応答遅れによりアイドル時の目標とする高圧縮比に対して小さい値である過渡時にはスロットル開口面積を大きめに補正することができる。つまり、アクセル開度の減少に応じた目標スロットル開口面積の減少が実圧縮比に見合って小さく補正されるので、目標エンジン回転速度にオーバーシュートを抑制しつつ滑らかに収束させることができる。
【0038】
次に、第2の実施形態について説明する。第1の実施形態では、実圧縮比によってエンジン発生トルクを補正するように吸入新気量を補正するが、圧縮比を可変制御するために圧縮比可変機構を駆動する際に消費されるエンジントルクについてまで考慮した補正ではない。本第2の実施形態では、前記圧縮比可変機構の駆動に消費されるエンジントルクをも考慮したスロットル開口面積の補正を行う。
【0039】
図11は、第2の実施形態における前記スロットル弁制御の制御ブロック、図12はメインフローを示す。ステップ1〜ステップ7でスロットル開口面積の基本値bTVO、第1の補正値hTVO1、第2の補正値hTVO2、第3の補正値hTVO3を算出するまでは、第1の実施形態と同様である。
【0040】
ステップ71では、目標圧縮比に基づいて圧縮比操作に消費されるエンジントルクを以下のように推定する。
圧縮比変化速度に比例して、圧縮比操作のためにエンジントルクが消費されるものとし、目標圧縮比に対して、実圧縮比は、時定数τvcrで応答するものとすると次式が成立する。
【0041】
【数1】
 【0042】
【0042】
但し、
Tvcr:圧縮比操作消費トルク
K:圧縮比変化速度に対する圧縮比操作消費トルクのゲイン
τvcr:圧縮比制御時定数
tε: 目標圧縮比
Δt:サンプリング時間
z−1:1演算遅れを表わす演算子
式(8)は、連続時間系の伝達関数を用いた場合に次式(9)で表わされる関係を、離散化し、差分方程式で表わしたものである。
【0043】
【数2】
【0044】
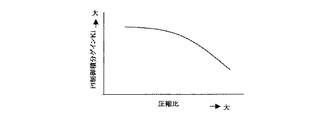
ステップ72では、上記のようにして算出した圧縮比操作消費トルクTvcrから、スロットル開口面積の第4の補正値を、図13に示したマップにより設定する。具体的には、圧縮比操作消費トルクTvcrの増大に基づいて第4の補正値は増大する特性を有する。
【0045】
このようにすれば、圧縮比操作のために消費されるエンジントルク分に見合ってスロットル開口面積が増大補正されるので、より圧縮比制御に適合した吸入新気量制御を行え、目標エンジン回転速度への応答性がより向上する。
【0046】
次に、第3の実施形態について説明する。以上示した実施形態では、目標エンジン回転速度に対するフィードフォワード補正量としての第1の補正値について実圧縮比による補正を行い、フィードバック補正量に対して圧縮比による補正は行っていないが、本第3の実施形態ではフィードバック補正量に対しても実圧縮比による補正を行う。
【0047】
図14は、第3の実施形態における前記スロットル弁制御の制御ブロック、図15はメインフローを示す。
第2の実施形態と異なるのは、スロットル開口面積の基本値に対するフィードバック補正量として第3の補正値を算出するブロック(図13)及びステップ70(図14)において、該算出に用いる制御ゲイン、具体的にはPI制御における比例ゲインKp及び積分ゲインKi(第2の実施形態では固定値)を、実圧縮比に基づいて図16、図17に示したマップにより可変に設定することである。具体的には、比例ゲインKp及び積分ゲインKi共に実圧縮比が小さいときに大きくし、実圧縮比が大きくなるほど小さくなるように設定する。
【0048】
すなわち、実圧縮比に応じた第1の補正値(フィードフォワード補正量)の設定により、エンジン回転速度のオーバーシュート(アンダーシュート)を抑制できるが、圧縮比が小さいときはスロットル開口面積変化に対するエンジントルク変化率(感度)が小さいので、目標エンジン回転速度への収束が遅れ気味となる。
【0049】
そこで、本実施形態のようにフィードバック補正量についても制御ゲインを実圧縮比に基づいて補正することで、スロットル開口面積変化に対するエンジントルク変化率を適正に維持することができ、目標エンジン回転速度へ滑らか、かつ、速やかに収束させることができる。
【図面の簡単な説明】
【図1】本発明に係る吸気制御装置を備えたエンジンのシステム構成図。
【図2】同上装置の圧縮比可変機構により低圧縮比に操作するときの動作を示す図。
【図3】同じく高圧縮比に操作するときの動作を示す図。
【図4】同じく高圧縮比に維持するときの動作を示す図。
【図5】第1実施形態の制御ブロック図。
【図6】同じくメインフローを示す図。
【図7】同じくアクセル開度とエンジン回転速度とから目標圧縮比を求める特性マップ。
【図8】同じくアクセル開度からスロットル開口面積の基本値を求める特性マップ。
【図9】同じくアイドル時目標エンジン回転速度から第1の補正値を求める特性マップ。
【図10】第1実施形態の作用・効果を示すタイムチャート。
【図11】第2実施形態の制御ブロック図。
【図12】同じくメインフローを示す図。
【図13】同じく圧縮比操作消費トルクから第4の補正値を求める特性マップ。
【図14】第3実施形態の制御ブロック図。
【図15】同じくメインフローを示す図。
【図16】同じく圧縮比からPI制御比例ゲインKpを求める特性マップ。
【図17】同じく圧縮比からPI制御積分ゲインKiを求める特性マップ。
【符号の説明】
31…クランク軸 34…ロアーリンク 35…アッパーリンク 38…ピストン 40…制御リンク 42…制御軸 43…圧縮比制御アクチュエータ 51…ターボ過給機 57…スロットル弁 58…スロットルアクチュエータ 59…EGR通路 60…EGR弁 61…アクセル開度センサ 62…回転速度センサ 64…圧縮比センサ 68…ECU
【発明の属する技術分野】
本発明は、圧縮比を可変制御するエンジンにおいてアイドル時の吸気量を制御する技術に関する。
【0002】
【従来の技術】
車両用エンジンでは、一般にアイドル時のエンジン回転速度を目標エンジン回転速度に制御している。
【0003】
具体的には、アクセル開度に応じて算出したスロットル開口面積の基本値を、目標エンジン回転速度から求めたフィードフォワード補正値と、目標エンジン回転速度と実エンジン回転速度との偏差から算出したフィードバック補正量とに基づいて補正し、最終的な目標スロットル開口面積に従ってスロットル弁を操作するものがある(特許文献1参照)。
【0004】
一方、エンジンの圧縮比を可変とし、運転状態に応じて、エンジン性能にとって適切な圧縮比に制御する可変圧縮比エンジンが開示されている。このものでは、低負荷運転状態では、熱効率の向上を目的として圧縮比を高くするが、高負荷運転状態では、ノックが発生しないように圧縮比を低くしている(特許文献2参照)。
【0005】
【特許文献1】
特開平11−287142号公報
【特許文献2】
特開平7−229431号公報
【0006】
【発明が解決しようとする課題】
しかしながら、後者の可変圧縮比エンジンの制御装置において、前者のアイドル回転速度制御を行った場合、以下のような問題がある。
【0007】
アイドル回転速度制御を行う場合のエンジン負荷は低いので、通常の圧縮比設定は高圧縮比であるが、高負荷運転状態からアイドル状態への移行直後は、圧縮比の応答遅れによって、実際の圧縮比は高くなりきっていない可能性がある。また、可変圧縮比機構の保護等のために、高圧縮比にすることが禁止されている場合もある。
【0008】
このような場合に、アイドル回転速度制御を行うと、通常の設定よりも低圧縮比であることによって、同じスロットル開度に対して発生するエンジントルクが小さいため、前記フィードフォワード補正値によって算出する補正スロットル開度が不足気味となり、フィードバック制御によって、定常的には、目標とするエンジン回転速度を実現できても、過渡的な収束性が悪くなることがあった。
【0009】
本発明は、このような従来の課題に着目してなされたもので、アイドル時に圧縮比制御の遅れに見合うように吸入新気量を補正制御することにより、応答性良く目標エンジン回転速度に収束できるようにすることを目的とする。
【0010】
【課題を解決するための手段】
このため本発明は、圧縮比を可変制御するエンジンにおいて、アイドル時に目標エンジン回転速度に制御するときに、吸入新気量可変機構の制御量を実圧縮比に基づいて補正する構成とした。
【0011】
これにより、アイドル時に圧縮比可変機構で制御される圧縮比の制御応答遅れに見合うように吸入新気量可変機構の制御量が補正されて吸入新気量を実圧縮比に適合するように補正制御することができるので、エンジン回転速度を目標エンジン回転速度に速やかに収束させることができる。
【0012】
【発明の実施の形態】
以下に、本発明の実施形態を図に基づいて説明する。
図1は、可変圧縮比機構ともなる複リンク式ピストン−クランク機構を備えたエンジンの全体図である。
【0013】
クランク軸31は、複数のジャーナル部32とクランクピン部33とカウンタウエィト部31aとを備えており、エンジン本体となる図示しないシリンダブロックの主軸受に、ジャーナル部32が回転自在に支持されている。前記クランクピン部33は、ジャーナル部32から所定量偏心しており、ここに第2リンクとなるロアーリンク34が回転自在に連結されている。
【0014】
前記ロアーリンク34は、略T字形をなすもので、その本体34aとキャップ34bとから分割可能に構成された略中央の連結孔に前記クランクピン部33が嵌合している。
【0015】
第1リンクとなるアッパーリンク35は、下端側が連結ピン36によりロアーリンク34の一端に回動可能に連結され、上端側がピストンピン37によりピストン38に回動可能に連結されている。前記ピストン38は、燃焼圧力を受け、シリンダブロックのシリンダ39内を往復動する。
【0016】
前記シリンダ39の上部には、クランク軸31の回転に同期して吸気ポート44を開閉する吸気弁43と、同じくクランク軸31の回転に同期して排気ポート46を開閉する排気弁45と、が配置されている。
【0017】
第3リンクとなる制御リンク40は、上端側が連結ピン41によりロアーリンク34の他端に回動可能に連結され、下端側が制御軸42を介してエンジン本体例えばシリンダブロックの適宜位置に回動可能に連結されている。詳しくは、制御軸42は、小径部42bを中心として回転するようにエンジン本体に支持されており、この小径部42bに対し偏心している大径部42aに、前記制御リンク40下端部が回転可能に嵌合している。
【0018】
前記小径部42bは、圧縮比制御アクチュエータ43によって回動位置が制御される。小径部42bが回動すると小径部42bに対して偏心している大径部42aの軸中心位置、特に、エンジン本体に対する相対位置が変化する。これにより、制御リンク40の下端の揺動支持位置が変化する。そして、前記制御リンク40の揺動支持位置が変化すると、ピストン38の行程が変化し、ピストン上死点(TDC)におけるピストン38の位置が上下する(つまり図1のy座標が大きく)。これにより、エンジン圧縮比を変えることが可能となる。前記圧縮比制御アクチュエータ43は、制御リンク40から加わる反力に抗して、任意の回動位置で小径部42bを保持することができるようになっている。圧縮比制御アクチュエータ43としては、油圧ベーン式アクチュエータを用いる。
【0019】
図2〜図4は、該圧縮比制御アクチュエータ43を制御する油圧システムを示す。図において、圧縮比制御アクチュエータ43は、ハウジング43a内に前記小径部42bに連結された駆動軸43b及び該駆動軸43bに固定されてハウジング43a内を容積可変なA室とB室とに仕切るベーン43cが回動自由に収納される。一方、電動モータ101で駆動されるオイルポンプ102の吐出口が、逆止弁103、開閉弁104、方向切換弁105のポートcに接続され、該方向切換弁105のポートdが低圧側のオイルパン106に接続される。また、前記方向切換弁105のポートe、fが、それぞれ前記圧縮比制御アクチュエータ43のポートa、bに接続される。また、前記逆止弁103と開閉弁104との間から分岐するオイル通路にアキュームレータ107が接続され、開閉弁104と方向切換弁105との間から分岐するオイル通路がエンジンオイルギャラリーに接続される。
【0020】
そして、図2の状態では前記開閉弁104が開、方向切換弁105が図示左端に制御され、オイルポンプ102から吐出された高圧油は、開閉弁104、方向切換弁105のポートc、eを介して前記圧縮比制御アクチュエータ43のポートaからA室に供給され、B室内の油は、ポートbから方向切換弁105のポートf、dを介してオイルパン106に戻される。これにより、A室の容積が増大してベーン43cと共に小径部42bが図で時計回りに回動し、制御リンク40の揺動支持位置が変化して低圧縮比に制御される。
【0021】
一方、上記状態から図3に示すように、方向切換弁105を図示右端に切換制御すると、高圧油は、開閉弁104のポートc、fを介して前記圧縮比制御アクチュエータ43のポートbからB室に供給され、A室内の油は、ポートaから方向切換弁105のポートe、dを介してオイルパン106に戻される。これにより、B室の容積が増大してベーン43cと共に小径部42bが図で反時計回りに回動し、制御リンク40の揺動支持位置が変化して高圧縮比に制御される。高圧縮比側に保持する場合は、図4に示すように、方向切換弁105を図示中央に移動させると共に、開閉弁104を閉とする。
【0022】
図1に戻って、このエンジンは、過給機としてターボ過給機51を備えている。このターボ過給機51は、排気通路54に位置するタービン52と吸気通路55に位置するコンプレッサ53とを同軸状に配置した構成であり、運転条件に応じて過給圧を制御するために、タービン52の上流側から排気の一部をバイパスさせる排気バイパス弁56を備えている。
【0023】
また、前記コンプレッサ53下流の吸気通路55に吸入新気量を可変制御するスロットル弁57を備え、該スロットル弁57がステップモータなどのスロットルアクチュエータ58により駆動される。
【0024】
また、前記排気通路54のエンジン本体とタービン52との間から分岐してスロットル弁57下流の吸気通路55に接続するEGR通路59と、該EGR通路59に介装されたEGR弁60とが設けられている。
【0025】
前記EGR弁60は、例えば、ステップモータを用いた電子制御式のものであり、その開度に応じて吸気側に還流する排気の量、すなわち、エンジン本体に吸入されるEGR量を制御する。
【0026】
エンジン運転状態を検出するセンサ類として、ドライバにより操作されるアクセル開度を検出するアクセル開度センサ61、エンジン回転速度を検出する回転速度センサ62、スロットル弁57上流の過給圧を検出する過給圧センサ63、実圧縮比を検出する圧縮比センサ64、エンジン冷却水温度を検出する水温センサ65、ノッキングを検出するノッキングセンサ66が設けられ、これらセンサ類からの検出信号は、エンジンコントロールユニット(ECU)67に入力される。
【0027】
かかる構成のエンジンにおいて、前記ECU67は、各種エンジン制御(燃料噴射制御、点火制御等)と共に、前記可変圧縮比機構による圧縮比の制御及びこれにより制御される実圧縮比に応じた前記スロットル弁57の開度制御を以下のように実行する。
【0028】
図5は、第1の実施形態における前記スロットル弁制御の制御ブロック、図6はメインフローを示す。
図6において、ステップ1では、アクセル開度とエンジン回転速度とに基づいて、図7に示したマップにより目標圧縮比を設定する。具体的には、アクセル開度に応じた要求エンジン負荷が大きくなるほどノッキング発生傾向が増大するのでノッキング抑制のため圧縮比を小さくするが、高回転領域では充填効率が低下するので少し圧縮比を大きめに設定する。
【0029】
ステップ2では、設定された目標圧縮比となるように前記可変圧縮比機構を駆動する。
ステップ3では、アクセル開度に応じて要求エンジン負荷に見合ったスロットル開口面積の基本値(基本制御量)bTVOを、図8に示したマップにより設定する。
【0030】
ステップ4では、アイドル時目標エンジン回転速度と圧縮比から図9に示したマップにより、前記スロットル開口面積の基本値に対するフィードフォワード補正量として第1の補正値hTVO1を設定する。具体的には、目標回転速度の増大に応じて要求出力が増大するので第1の補正値hTVO1を大きくすることは従来同様であるが、可変圧縮比機構の制御応答遅れ等によって圧縮比が小さいときは、同一のスロットル開口面積に対して発生するエンジントルクが小さいため、第1の補正値hTVO1を大きくし、圧縮比が大きくなって定常時の高圧縮比に近づくほど第1の補正値hTVO1を小さくする。
【0031】
ステップ5では、前記スロットル開口面積の基本値に対する外部負荷の大きさに応じたフィードフォワード補正量として、補機作動状態信号と変速シフト位置信号から第2の補正値hTVO2を算出する。具体的には、以下のように算出する。
【0032】
hTVO2=SWac+SWrf+SWshift・・・(1)
式(1)において、エアコンリレーがONのエアコン作動状態では、
SWac=CONSTac、但し、
エアコンリレーがOFFのエアコン非作動状態では、
SWac=0
ラジエータファンリレーがONのラジエータファン作動状態では、
SWRF=CONSTrf
ラジエータファンリレーがOFFのラジエータファン非作動状態では、
SWrf=0
パワーステアリングスイッチがONのパワーステアリング非作動状態では、
SWps=CONSTps
パワーステアリングスイッチがOFFのパワーステアリング非作動状態では、
SWps=0
変速位置がDレンジでは、
SWshift=CONSTd
変速位置がRレンジでは、
SWshift=CONSTr
変速位置がNレンジまたはPレンジでは、
SWshift=0
ただし、
CONSTac:エアコン対応補正量
CONSTrf:ラジエータファン対応補正量
CONSTps:パワーステアリング対応補正量
CONSTd:Dレンジ対応補正量
CONSTr:Rレンジ対応補正量
ステップ6では、アイドル時目標回転速度tNeidleと実エンジン回転速度Neとの回転偏差ΔNeを次式により算出する。
【0033】
ΔNe=tNeidle−Ne・・・(2)
ステップ7では、前記回転偏差ΔNeに基づいて、第3の補正値hTVO3を以下のように算出する。
【0034】
hTVO3=hTVOp+Ki×hTVOi・・・(3)
hTVOp=Kp×ΔNe・・・(4)
hTVOi=z−1−hTVOi+(ΔNe×Δt)・・・(5)
但し、
Kp:PI制御比例ゲイン
Ki:PI制御積分ゲイン
Δt:サンプリング時間
z−1:1演算遅れを表わす演算子
ステップ8では、以上のようにして算出した第1の補正値hTVO1、第2の補正値hTVO1、第3の補正値hTVO1から、スロットル開口面積の総補正値hTVOを次式のように算出する。
【0035】
hTVO=hTVO1+hTVO2+hTVO3・・・(6)
ステップ9では、前記スロットル開口面積の基本値bTVOと、前記総補正値hTVOとに基づいて、スロットル目標開口面積tTVOを次式のように算出する。
【0036】
tTVO=bTVO+hTVO・・・(7)
ステップ10では、上記にようにして算出された目標スロットル開口面積となるようにスロットル弁を操作する。
【0037】
図10は、上記第1実施形態のアイドル時における動作を示す。アクセル開度の減少に追従して設定されるスロットル開口面積の基本値が、前記第1の補正量hTVOを含む総補正量で補正されるが、本実施形態では、該第1の補正量が目標エンジン回転速度と共に実圧縮比に基づいて補正して設定されるので、実圧縮比が応答遅れによりアイドル時の目標とする高圧縮比に対して小さい値である過渡時にはスロットル開口面積を大きめに補正することができる。つまり、アクセル開度の減少に応じた目標スロットル開口面積の減少が実圧縮比に見合って小さく補正されるので、目標エンジン回転速度にオーバーシュートを抑制しつつ滑らかに収束させることができる。
【0038】
次に、第2の実施形態について説明する。第1の実施形態では、実圧縮比によってエンジン発生トルクを補正するように吸入新気量を補正するが、圧縮比を可変制御するために圧縮比可変機構を駆動する際に消費されるエンジントルクについてまで考慮した補正ではない。本第2の実施形態では、前記圧縮比可変機構の駆動に消費されるエンジントルクをも考慮したスロットル開口面積の補正を行う。
【0039】
図11は、第2の実施形態における前記スロットル弁制御の制御ブロック、図12はメインフローを示す。ステップ1〜ステップ7でスロットル開口面積の基本値bTVO、第1の補正値hTVO1、第2の補正値hTVO2、第3の補正値hTVO3を算出するまでは、第1の実施形態と同様である。
【0040】
ステップ71では、目標圧縮比に基づいて圧縮比操作に消費されるエンジントルクを以下のように推定する。
圧縮比変化速度に比例して、圧縮比操作のためにエンジントルクが消費されるものとし、目標圧縮比に対して、実圧縮比は、時定数τvcrで応答するものとすると次式が成立する。
【0041】
【数1】
但し、
Tvcr:圧縮比操作消費トルク
K:圧縮比変化速度に対する圧縮比操作消費トルクのゲイン
τvcr:圧縮比制御時定数
tε: 目標圧縮比
Δt:サンプリング時間
z−1:1演算遅れを表わす演算子
式(8)は、連続時間系の伝達関数を用いた場合に次式(9)で表わされる関係を、離散化し、差分方程式で表わしたものである。
【0043】
【数2】
ステップ72では、上記のようにして算出した圧縮比操作消費トルクTvcrから、スロットル開口面積の第4の補正値を、図13に示したマップにより設定する。具体的には、圧縮比操作消費トルクTvcrの増大に基づいて第4の補正値は増大する特性を有する。
【0045】
このようにすれば、圧縮比操作のために消費されるエンジントルク分に見合ってスロットル開口面積が増大補正されるので、より圧縮比制御に適合した吸入新気量制御を行え、目標エンジン回転速度への応答性がより向上する。
【0046】
次に、第3の実施形態について説明する。以上示した実施形態では、目標エンジン回転速度に対するフィードフォワード補正量としての第1の補正値について実圧縮比による補正を行い、フィードバック補正量に対して圧縮比による補正は行っていないが、本第3の実施形態ではフィードバック補正量に対しても実圧縮比による補正を行う。
【0047】
図14は、第3の実施形態における前記スロットル弁制御の制御ブロック、図15はメインフローを示す。
第2の実施形態と異なるのは、スロットル開口面積の基本値に対するフィードバック補正量として第3の補正値を算出するブロック(図13)及びステップ70(図14)において、該算出に用いる制御ゲイン、具体的にはPI制御における比例ゲインKp及び積分ゲインKi(第2の実施形態では固定値)を、実圧縮比に基づいて図16、図17に示したマップにより可変に設定することである。具体的には、比例ゲインKp及び積分ゲインKi共に実圧縮比が小さいときに大きくし、実圧縮比が大きくなるほど小さくなるように設定する。
【0048】
すなわち、実圧縮比に応じた第1の補正値(フィードフォワード補正量)の設定により、エンジン回転速度のオーバーシュート(アンダーシュート)を抑制できるが、圧縮比が小さいときはスロットル開口面積変化に対するエンジントルク変化率(感度)が小さいので、目標エンジン回転速度への収束が遅れ気味となる。
【0049】
そこで、本実施形態のようにフィードバック補正量についても制御ゲインを実圧縮比に基づいて補正することで、スロットル開口面積変化に対するエンジントルク変化率を適正に維持することができ、目標エンジン回転速度へ滑らか、かつ、速やかに収束させることができる。
【図面の簡単な説明】
【図1】本発明に係る吸気制御装置を備えたエンジンのシステム構成図。
【図2】同上装置の圧縮比可変機構により低圧縮比に操作するときの動作を示す図。
【図3】同じく高圧縮比に操作するときの動作を示す図。
【図4】同じく高圧縮比に維持するときの動作を示す図。
【図5】第1実施形態の制御ブロック図。
【図6】同じくメインフローを示す図。
【図7】同じくアクセル開度とエンジン回転速度とから目標圧縮比を求める特性マップ。
【図8】同じくアクセル開度からスロットル開口面積の基本値を求める特性マップ。
【図9】同じくアイドル時目標エンジン回転速度から第1の補正値を求める特性マップ。
【図10】第1実施形態の作用・効果を示すタイムチャート。
【図11】第2実施形態の制御ブロック図。
【図12】同じくメインフローを示す図。
【図13】同じく圧縮比操作消費トルクから第4の補正値を求める特性マップ。
【図14】第3実施形態の制御ブロック図。
【図15】同じくメインフローを示す図。
【図16】同じく圧縮比からPI制御比例ゲインKpを求める特性マップ。
【図17】同じく圧縮比からPI制御積分ゲインKiを求める特性マップ。
【符号の説明】
31…クランク軸 34…ロアーリンク 35…アッパーリンク 38…ピストン 40…制御リンク 42…制御軸 43…圧縮比制御アクチュエータ 51…ターボ過給機 57…スロットル弁 58…スロットルアクチュエータ 59…EGR通路 60…EGR弁 61…アクセル開度センサ 62…回転速度センサ 64…圧縮比センサ 68…ECU
Claims (11)
- 吸入新気量を可変とする吸入新気量可変機構と、圧縮比を可変とする圧縮比可変機構とを備え、アイドル時に目標エンジン回転速度となるように前記吸入新気量可変機構を制御して吸入新気量を制御するエンジンの吸気制御装置であって、
前記アイドル時における吸入新気量可変機構の制御量を、前記圧縮比可変機構によって制御される実圧縮比に基づいて補正することを特徴とするエンジンの吸気制御装置。 - 前記圧縮比可変機構により圧縮比をエンジン運転状態に基づいて制御しつつ、アクセル開度に基づいて算出した前記吸入新気量可変機構の基本制御量を、アイドル時の目標エンジン回転速度、実エンジン回転速度及び実圧縮比を含む要素に基づいて補正し、該補正した制御量で前記吸入新気量可変機構を制御することを特徴とする請求項1に記載のエンジンの吸気制御装置。
- 前記基本制御量の圧縮比による補正は、アイドル時の目標エンジン回転速度に基づいて算出されるフィードフォワード補正量の圧縮比に応じた補正を含むことを特徴とする請求項2に記載のエンジンの吸気制御装置。
- 前記基本制御量の圧縮比による補正は、アイドル時の目標エンジン回転速度と実エンジン回転速度との偏差に応じて算出されるフィードバック補正量の圧縮比に応じた補正を含むことを特徴とする請求項2または請求項3に記載のエンジンの吸気制御装置。
- 前記フィードバック補正量の圧縮比に応じた補正は、該フィードバック補正量を算出する際の制御ゲインの圧縮比に応じた補正であることを特徴とする請求項4に記載のエンジンの吸気制御装置。
- 前記基本制御量の圧縮比による補正は、前記圧縮比可変機構による圧縮比操作に消費されるエンジントルクに応じた補正を含むことを特徴とする請求項2〜請求項5のいずれか1つに記載のエンジンの吸気制御装置。
- 前記基本制御量の圧縮比による補正は、圧縮比が小さいときは大きくし、圧縮比が低いときは高くする補正であることを特徴とする請求項2〜請求項6のいずれか1つに記載のエンジンの吸気制御装置。
- 前記基本制御量の補正は、外部負荷の大きさに応じたフィードフォワード補正量を含むことを特徴とする請求項2〜請求項7のいずれか1つに記載のエンジンの吸気制御装置。
- 前記吸入新気量可変機構は、吸気系に介装されて開度を制御されるスロットル弁を含んで構成されることを特徴とする請求項1〜請求項8のいずれか1つに記載のエンジンの吸気制御装置。
- 前記吸入新気量可変機構は、バルブ特性を可変な吸気バルブを含んで構成されることを特徴とする請求項1〜請求項9のいずれか1つに記載のエンジンの吸気制御装置。
- 前記圧縮比可変機構は、
一端がピストンにピストンピンを介して連結されるアッパリンクと、
前記アッパリンクの他端が第1連結ピンを介して連結されるとともに、クランクシャフトのクランクピンに回転可能に取り付けられるロアリンクと、
このロアリンクに第2連結ピンを介して一端が連結されるとともに、他端がエンジン本体に対して揺動可能に支持されるコントロールリンクと、
圧縮比の変更時に、前記コントロールリンクの他端の位置をエンジン本体に対して変位させる支持位置可変手段と、
を有することを特徴とする請求項1〜請求項10のいずれか1つに記載のエンジンの吸気制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003028438A JP2004239146A (ja) | 2003-02-05 | 2003-02-05 | エンジンの吸気制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003028438A JP2004239146A (ja) | 2003-02-05 | 2003-02-05 | エンジンの吸気制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004239146A true JP2004239146A (ja) | 2004-08-26 |
Family
ID=32955912
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003028438A Pending JP2004239146A (ja) | 2003-02-05 | 2003-02-05 | エンジンの吸気制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004239146A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013061684A1 (ja) | 2011-10-24 | 2013-05-02 | 日産自動車株式会社 | 内燃機関の回転速度制御装置及び回転速度制御方法 |
| CN106168162A (zh) * | 2015-05-22 | 2016-11-30 | 丰田自动车株式会社 | 可变压缩比内燃机 |
| DE112010005427B4 (de) * | 2010-03-29 | 2018-02-08 | Toyota Jidosha Kabushiki Kaisha | Fahrzeugsteuerungsgerät |
-
2003
- 2003-02-05 JP JP2003028438A patent/JP2004239146A/ja active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112010005427B4 (de) * | 2010-03-29 | 2018-02-08 | Toyota Jidosha Kabushiki Kaisha | Fahrzeugsteuerungsgerät |
| WO2013061684A1 (ja) | 2011-10-24 | 2013-05-02 | 日産自動車株式会社 | 内燃機関の回転速度制御装置及び回転速度制御方法 |
| CN103874839A (zh) * | 2011-10-24 | 2014-06-18 | 日产自动车株式会社 | 内燃机的转速控制装置以及转速控制方法 |
| US9284893B2 (en) | 2011-10-24 | 2016-03-15 | Nissan Motor Co., Ltd. | Apparatus and method for controlling rotation speed of internal combustion engine |
| EP2772633A4 (en) * | 2011-10-24 | 2016-07-27 | Nissan Motor | SPEED CONTROLLER AND SPEED CONTROL METHOD FOR A COMBUSTION ENGINE |
| CN103874839B (zh) * | 2011-10-24 | 2016-08-31 | 日产自动车株式会社 | 对内燃机转速进行控制的装置以及方法 |
| CN106168162A (zh) * | 2015-05-22 | 2016-11-30 | 丰田自动车株式会社 | 可变压缩比内燃机 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4135488B2 (ja) | エンジンの吸気制御装置 | |
| EP1160430B1 (en) | Internal combustion engine with a supercharger and an improved piston crank mechanism | |
| CN103874839B (zh) | 对内燃机转速进行控制的装置以及方法 | |
| JP4438368B2 (ja) | 可変圧縮比エンジンの制御装置 | |
| JP4300312B2 (ja) | 可変圧縮比内燃機関の制御装置及び制御方法 | |
| JP4269909B2 (ja) | 可変圧縮比内燃機関の制御装置及び制御方法 | |
| CN110730861B (zh) | 内燃机的控制方法及控制装置 | |
| JP4415464B2 (ja) | 可変圧縮比装置付ターボ過給内燃機関 | |
| JP2004239146A (ja) | エンジンの吸気制御装置 | |
| JP2005016381A (ja) | 可変圧縮比機構付き内燃機関の始動制御装置 | |
| JP4536342B2 (ja) | 可変圧縮比機構付き内燃機関の制御装置 | |
| JP2004225605A (ja) | エンジンのegr制御装置 | |
| JP5471875B2 (ja) | 可変圧縮比内燃機関の制御装置 | |
| JP4155019B2 (ja) | エンジンの吸気制御装置 | |
| JP2007231834A (ja) | 内燃機関の制御装置 | |
| JP4241351B2 (ja) | 可変圧縮比内燃機関の制御装置及び制御方法 | |
| JP4244790B2 (ja) | 可変圧縮比内燃機関及びその制御方法 | |
| JP5817540B2 (ja) | 可変動弁装置付内燃機関の制御装置 | |
| JP2010185302A (ja) | 内燃機関の制御装置 | |
| JP4765699B2 (ja) | レシプロ式内燃機関の制御方法 | |
| JP2004239147A (ja) | 内燃機関の圧縮比制御装置 | |
| JPH10141098A (ja) | 内燃機関のバルブタイミング制御装置 | |
| JP6870350B2 (ja) | 内燃機関の制御装置 | |
| JP4432759B2 (ja) | 車両用内燃機関の制御装置 | |
| JP4165432B2 (ja) | 内燃機関の制御装置 |