JP2004247979A - 車載用カメラ装置 - Google Patents
車載用カメラ装置 Download PDFInfo
- Publication number
- JP2004247979A JP2004247979A JP2003035921A JP2003035921A JP2004247979A JP 2004247979 A JP2004247979 A JP 2004247979A JP 2003035921 A JP2003035921 A JP 2003035921A JP 2003035921 A JP2003035921 A JP 2003035921A JP 2004247979 A JP2004247979 A JP 2004247979A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- camera
- camera device
- unit
- origin
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Closed-Circuit Television Systems (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
- Navigation (AREA)
- Image Input (AREA)
- Image Processing (AREA)
Abstract
【解決手段】予めフロントガラスに固定してあるターゲットや、路面白線など情報から得られる消失点と、車両の出荷検査などで取得した初期データとを照合し、カメラ軸ずれを検出することが可能となる。ターゲットや消失点を原点とし、先行車や対向車の位置を相対的に求める手法により、カメラ軸ずれを補正することが可能となる。
【選択図】 図3
Description
【発明の属する技術分野】
本発明は、画像処理装置を備えた車載カメラ装置の技術分野に属する。
【0002】
【従来の技術】
画像処理装置を備えた車載カメラ装置は、路面のレーンマークや周辺車両などを認識して画像処理を行い、車両の走行制御や前照灯の配光制御などに活用されている。しかし、振動,接触等により車載カメラ装置の取付位置が初期設定位置に対して経時的に変化した場合に正確な画像処理を行うことができない場合があり、光軸の補正が必要となっていた。
【0003】
ここで車載カメラ装置の光軸ずれの影響について、画像上にある領域を定義し、車両を検出する手段を備えた、車両制御や前照灯の配光制御などに用いる車載カメラ装置を例にとって、図1と図2を用いて説明する。
【0004】
車両は、比較的輝度の高いテールランプやヘッドランプなどを検出して、車両認識を行い、自車両との距離が算出できる。信号機や街灯などの外乱ノイズを削除するために、予め先行車両検出領域103及び、対向車両検出領域104を設けている。それぞれの検出領域は、走行する車線数や、レンズの画角等から、先行車両や対向車両が存在する領域を推定し定められたものである。用途に応じて先行車両検出領域と対向車両検出領域を合せてひとつの領域としても良い。
【0005】
車載カメラ装置が正常の位置に取り付けている場合は図1のように、先行車両検出領域103の中に先行車両101のテールランプが存在し、対向車両検出領域104の中に対向車両102のヘッドランプが存在する。今、画像上の原点
(0,0)を左上角に定義した場合、先行車両101は座標(x01,y01)の位置に、対向車両102は座標(x02,y02)の位置にあることを算出し、自車両までの距離を推測することが可能である。
【0006】
しかし、振動,接触等により車載カメラ装置の取付位置が初期設定位置に対して経時的に変化し、図2のようにカメラの光軸がX方向にΔx、Y方向にΔyずれた場合、先行車両101は座標(x01′,y01′)の位置に、対向車両
102は座標(x02′,y02′)の位置に存在すると算出される。そのため、それぞれの車両までの距離を実際の距離よりも近くにあると判断し、さらには先行車両101は対向車両であると判定、対向車両は車両検出領域外の外乱ノイズと判定して、装置の誤動作につながってしまう。このような車載カメラ装置の光軸ずれが生じた場合の検出及び補正手段としては、例えば特許文献1の発明がある。
【0007】
【特許文献1】
特開2001−171544号公報
【0008】
【発明が解決しようとする課題】
特許文献1では、画像処理によって路面上のレーンマーカー(白線)を検出し、レーンマーカーに沿って走行するための目標操舵角θ1を算出し、この値が車両の操舵角θ2検出値と一致しない場合を光軸ずれと判定する手段としているが、これは車載カメラ装置がヨー方向(X方向)に位置ずれを起こした場合のみ有効であり、ピッチ方向(Y方向)に位置ずれを起こした場合には光軸ずれを検出できないという課題があった。本発明では、以上の目的を解決するためになされたものであり、車載カメラ装置が振動,接触等により取付位置が初期設定位置に対して経時的にヨー,ピッチ,ロール方向に変化した場合でも、画像処理上の誤判定を防止する車載カメラ装置を提供するものである。
【0009】
【課題を解決するための手段】
上記目的はカメラ部と、画像処理部と、カメラ軸補正部と警報装置から構成される車載カメラ装置において、カメラ軸補正部は、予め固定してある原点補正ターゲットを認識し、取り込んだ映像からカメラの軸がどこを向いているか推測し、画像処理を行うための原点補正を行うことを特徴とした車載用カメラ装置により達成される。
【0010】
また、上記目的はカメラ部と、画像処理部と、カメラ軸補正部と警報装置から構成される車載カメラ装置において、カメラ軸補正部は、自車両が直線路を走行中、カメラ部で路面の白線や路肩,街灯などから消失点を算出し、その消失点の初期値からの位置ずれから原点補正を行うことを特徴とした車載用カメラ装置により達成される。
【0011】
【発明の実施の形態】
以下、本発明の実施形態を図面と共に詳述する。
【0012】
図3は本発明を適用した車載用カメラ装置の一実施形態の基本構成を示すものである。レンズ10aと撮像素子10bからなるカメラ部11と画像処理部12とカメラ軸補正部13と、初期データを記憶しておくEPROM14と、図4のように車両のフロントガラスに貼り付けた形状の原点補正ターゲット20と警報装置15から構成される車載カメラ装置である。原点補正ターゲット20は、撮像素子10bの撮像領域の中にあり、路面の白線や車両認識の妨げにならない位置で、且つできるだけ原点補正調整範囲が大きくとれるように画像中央に位置することが望ましい。
【0013】
レンズ10aのピントが遠方に定められている場合、フロントガラスにある原点補正ターゲット20はレンズに近すぎてピントぼけが生じてしまうので、その際はボンネット上のマスコット30を原点補正ターゲットとして利用するか、後に述べる消失点検出による原点補正手段を適用する。
【0014】
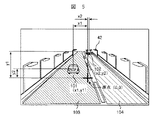
図5に示すように車載カメラ装置は、始動時、原点補正ターゲット20と車両前方の背景を映し出す。車載カメラ装置の画像処理部12は、原点補正ターゲット20を原点(0,0)と定義し、原点を基準として先行車両検出領域103及び対向車両検出領域104を設ける。この領域を定義することによって、信号機や街灯42などの外乱ノイズを、車両と誤認識させないことが可能になり、有効である。また必要に応じて先行車両検出領域と対向車両検出領域を合せてひとつの領域としても良い。
【0015】
ここで、車載カメラ装置が初期設定の位置にあり、先行車両101が存在した場合は、原点補正ターゲット20を原点とした先行車両検出領域103内の座標(x1,y1)に位置する。この座標から、先行車両の自車両からの距離を推測し、車両制御或いは前照灯の配光制御などに活用する。
【0016】
同様に対向車両102が存在した場合は、原点補正ターゲット20を原点とした対向車両検出領域104の座標(x2,y2)に位置する。この座標から、対向車両の自車両からの距離を推測し、車両制御或いは前照灯の配光制御などに活用する。
【0017】
車載カメラ装置が振動,接触等により取付位置が初期設定位置に対して経時的にX,Y方向にそれぞれΔx,Δy方向に位置ずれを起こした場合を図6とフローチャート図8を用いて説明する。
【0018】
このときの先行車両101や対向車両102と自車両までの距離は、上記で説明した車載カメラ装置が初期設定の位置にある背景と同じ状態とする。
【0019】
まず、原点補正ターゲット20を検出(S101)し、この絶対位置を初期データと照合(S102)し、Δx,Δyがどれくらいであるかを算出する。原点補正ターゲットの絶対位置を検出する場合にのみ、画像の端などを基準にして絶対座標を求める。初期データは車両の出荷検査等で測定した際にEPROM14などに記憶した原点補正ターゲット20の位置の値とする。
【0020】
ΔxまたはΔyが補正できないほど移動していた場合(S103)は警報装置15を用いて運転者に警告する(S104)。この場合は、ディーラーなどで機械的に光軸を補正する必要がある。
【0021】
ΔxとΔyが補正範囲内の位置ずれであれば、先行車両検出領域103と対向車両検出領域104を設定する(S105)。原点補正ターゲットを原点と定義しているので、先行車両検出領域103と対向車両検出領域104も必然的に補正されていて、先行車両101や対向車両102の位置が誤った領域で検出されることはない。また先行車両101の座標(x1,y1),対向車両102の座標(x2,y2)も車載カメラ装置が正規の位置の場合と同じ値となり、それぞれの車両から自車両までの距離を誤ることはない。先行車両を検出した場合
(S106)は先行車両距離算出処理を行い(S107)、車両制御或いは前照灯の配光制御などの制御ルーチンへ移行する(S108)。同様に対向車両を検出した場合(S109)は先行車両距離算出処理を行い(S110)、車両制御或いは前照灯の配光制御などの制御ルーチンへ移行する(S108)。
【0022】
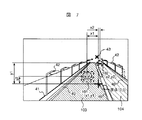
先に述べたように、自車両前方の遠方の車両を検出するために、レンズ10aのピントを無限遠方に定めた場合など、フロントガラスに装着した原点補正ターゲット20にはピントが合わず、映像がボケてしまう場合がある。その際は原点補正ターゲット20を用いずに、消失点43を原点と定めて補正する方法を適用する。この方法について図7を用いて説明する。
【0023】
自車両が平坦な直線路を走行中、白線40や路肩41,街灯42など互いに平行に配置されているものをそれぞれ直線で結ぶと無限遠方で交わり、その点が消失点43となる。消失点43は画像処理部12において白線40や路肩41,街灯42などを検出し、画像処理を重ねることにより求めることが可能である。消失点43の座標を原点(0,0)と定義し、原点を基準に先行車両検出領域103及び、対向車両検出領域104を定義すれば、位置ずれが生じた場合でも、原点補正ターゲット20を適用する方法と同様に原点と車両の位置関係は変化しないため、有効である。また、道路の勾配や直線性を判断するためにはナビゲーションなどのデータを利用する。
【0024】
先行車両101や対向車両102と自車両までの距離は、上記で説明した車載カメラ装置が初期設定の位置にある背景と同じ状態とし、取付位置が初期設定位置に対して経時的にX,Y方向にそれぞれΔx,Δy方向に位置ずれを起こした場合での作用についてフローチャート図9を用いて説明する。
【0025】
ナビゲーションシステム16のデータを取得し(S201)、走行している道路が直進路で且つ勾配がないか判定する(S202)、道路がカーブや勾配があった場合は消失点43を正規の位置と比較できないので、直線で勾配が0になるまでナビゲーションシステムのデータの取得(S201)を続ける。直線路になった場合、消失点43を検出(S203)する。この絶対位置を初期データと照合(S204)し、Δx,Δyがどれくらいであるかを算出する。消失点43の絶対位置を検出する場合にのみ、画像の端などを基準にして絶対座標を求める。
初期値データは車両の出荷検査等で測定したEPROM14などに記憶してある消失点推測値とする。
【0026】
ΔxまたはΔyが補正できないほど移動していた場合(S205)は警報装置15を用いて運転者に警告する(S206)。この場合は、ディーラーなどで機械的に光軸を補正する必要がある。先行車両検出領域103と対向車両検出領域104を設定する(S207)。消失点43を原点と定義しているので、先行車両検出領域103と対向車両検出領域104も必然的に補正されていて、先行車両101や対向車両102の位置が誤った領域で検出されることはない。また先行車両101の座標(x1,y1),対向車両102の座標(x2,y2)も車載カメラ装置が正規の位置の場合と同じ値となり、それぞれの車両から自車両までの距離を誤ることはない。先行車両を検出した場合(S208)は先行車両距離算出処理を行い(S209)、車両制御或いは前照灯の配光制御などの制御ルーチンへ移行する(S210)。同様に対向車両を検出した場合(S211)は対向車両距離算出処理を行い(S212)、車両制御或いは前照灯の配光制御などの制御ルーチンへ移行する(S210)。
【0027】
以上の原点補正ターゲット20及び消失点43の何れの方法においても乗員の重量配分などによって生じるロール方向の位置ずれに対して補正できない場合がある。この際は、自車両の停車時などに、オートレビリングライト機能50の情報を取り込み、車両の傾きを検出して原点補正を行う方法をとる。
【図面の簡単な説明】
【図1】車載カメラ装置が初期設定位置にある場合の原点と先行車両と対向車の位置関係を示す図。
【図2】車載カメラ装置が位置ずれを起こした場合の原点と先行車両と対向車両の位置関係を示す図。
【図3】本発明の実施形態の一例を示すブロック図。
【図4】原点補正ターゲットとマスコットを示す図。
【図5】車載カメラ装置が初期設定位置にある場合の原点補正ターゲットと先行車両と対向車両の位置関係を示す図。
【図6】車載カメラ装置が位置ずれを起こした場合の原点補正ターゲットと先行車両と対向車両の位置関係を示す図。
【図7】車載カメラ装置が位置ずれを起こした場合の消失点と先行車両と対向車両の位置関係を示す図。
【図8】原点補正ターゲットを用いた原点補正の作用を示すフローチャート図。
【図9】消失点を用いた原点補正の作用を示すフローチャート図。
【符号の説明】
10a…レンズ、10b…撮像素子、11…カメラ部、12…画像処理部、
13…カメラ軸補正部、14…EPROM、15…警報装置、16…ナビゲーションシステム、20…原点補正ターゲット、30…マスコット。
Claims (5)
- カメラ部と、画像処理部と、カメラ軸補正部と警報装置から構成される車載カメラ装置において、
カメラ軸補正部は、予め固定してある原点補正ターゲットを認識し、取り込んだ映像からカメラの軸がどこを向いているか推測し、画像処理を行うための原点補正を行うことを特徴とした車載用カメラ装置。 - 請求項1において、ボンネット上のマスコットを前記原点補正ターゲットとしたことを特徴とした車載用カメラ装置。
- カメラ部と、画像処理部と、カメラ軸補正部と警報装置から構成される車載カメラ装置において、カメラ軸補正部は、自車両が平坦な直線路を走行中、カメラ部で路面の白線や路肩,街灯などから消失点を算出し、初期値からの位置ずれから原点補正を行うことを特徴とした車載用カメラ装置。
- 請求項3において、前記カメラ軸補正部は、直線路を判定するための検出手段としてナビゲーションのデータを取り込むことを特徴とした車載用カメラ装置。
- 請求項1〜4において、前記カメラ軸補正部は、自車両の停車時などに、オートレビリングライト機能の情報を取り込み、乗員配分など要因とした車両の傾きを検出して原点補正を行うことを特徴とした車載用カメラ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003035921A JP2004247979A (ja) | 2003-02-14 | 2003-02-14 | 車載用カメラ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003035921A JP2004247979A (ja) | 2003-02-14 | 2003-02-14 | 車載用カメラ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004247979A true JP2004247979A (ja) | 2004-09-02 |
Family
ID=33021169
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003035921A Pending JP2004247979A (ja) | 2003-02-14 | 2003-02-14 | 車載用カメラ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004247979A (ja) |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1681577A2 (de) | 2005-01-12 | 2006-07-19 | Robert Bosch Gmbh | Verfahren für die Bildlagekorrektur eines Monitorbilds |
| FR2896219A1 (fr) * | 2006-01-19 | 2007-07-20 | Valeo Vision Sa | Procede de reglage de l'orientation d'une camera installee dans un vehicule et systeme de mise en oeuvre de ce procede |
| WO2008038370A1 (fr) * | 2006-09-28 | 2008-04-03 | Pioneer Corporation | Détecteur, procédé et programme d'informations de circulation et support d'enregistrement |
| CN102201056A (zh) * | 2010-03-26 | 2011-09-28 | 日产自动车株式会社 | 车辆用环境识别装置以及方法 |
| JP2012168845A (ja) * | 2011-02-16 | 2012-09-06 | Fujitsu Ten Ltd | 物体検出装置、および、物体検出方法 |
| WO2012131947A1 (ja) * | 2011-03-30 | 2012-10-04 | パイオニア株式会社 | 画像処理装置、及び画像表示装置 |
| JP2013195783A (ja) * | 2012-03-21 | 2013-09-30 | Ricoh Co Ltd | 位置ずれ検出装置、車両及び位置ずれ検出方法 |
| JP2014082622A (ja) * | 2012-10-16 | 2014-05-08 | Denso Corp | 車載カメラの取り付け誤差検出装置 |
| JP2014115793A (ja) * | 2012-12-10 | 2014-06-26 | Mitsubishi Electric Corp | 画像処理装置および画像処理方法 |
| JPWO2013030932A1 (ja) * | 2011-08-29 | 2015-03-23 | パイオニア株式会社 | ナビゲーション装置、画像表示制御装置、サーバ、調整装置、及び前方画像表示制御方法 |
| WO2017042999A1 (ja) * | 2015-09-07 | 2017-03-16 | パナソニックIpマネジメント株式会社 | 車載用ステレオカメラ装置、およびその補正方法 |
| WO2019130791A1 (ja) | 2017-12-27 | 2019-07-04 | 株式会社Jvcケンウッド | プロジェクタシステム及びカメラ評価システム |
| JP2020053083A (ja) * | 2019-12-06 | 2020-04-02 | パイオニア株式会社 | 撮影装置、制御方法、プログラム及び記憶媒体 |
| JP2022027306A (ja) * | 2020-07-31 | 2022-02-10 | トヨタ自動車株式会社 | 移動体妨害検出装置、移動体妨害検出システム、及び移動体妨害検出プログラム |
| US11490073B2 (en) | 2018-01-22 | 2022-11-01 | Jvckenwood Corporation | Image display device and camera evaluation system |
| JP2024065708A (ja) * | 2022-10-31 | 2024-05-15 | トヨタ自動車株式会社 | 車両検査システム、及び車両検査方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07120555A (ja) * | 1993-10-22 | 1995-05-12 | Nissan Motor Co Ltd | 車両用環境認識装置 |
| JPH0816999A (ja) * | 1994-07-05 | 1996-01-19 | Hitachi Ltd | 撮像装置を用いた環境認識装置,撮像装置を備えた車両,車両用の撮像装置,撮像装置を用いた車両用の環境認識装置、及び撮像データから環境を認識する方法 |
| JPH0952555A (ja) * | 1995-08-11 | 1997-02-25 | Mitsubishi Electric Corp | 周辺監視装置 |
| JPH11150726A (ja) * | 1997-11-18 | 1999-06-02 | Toyota Motor Corp | 車両用動画像処理方法および車両用動画像処理装置 |
| JP2004173037A (ja) * | 2002-11-21 | 2004-06-17 | Kyocera Corp | 車載カメラの光軸ずれ検出装置 |
-
2003
- 2003-02-14 JP JP2003035921A patent/JP2004247979A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07120555A (ja) * | 1993-10-22 | 1995-05-12 | Nissan Motor Co Ltd | 車両用環境認識装置 |
| JPH0816999A (ja) * | 1994-07-05 | 1996-01-19 | Hitachi Ltd | 撮像装置を用いた環境認識装置,撮像装置を備えた車両,車両用の撮像装置,撮像装置を用いた車両用の環境認識装置、及び撮像データから環境を認識する方法 |
| JPH0952555A (ja) * | 1995-08-11 | 1997-02-25 | Mitsubishi Electric Corp | 周辺監視装置 |
| JPH11150726A (ja) * | 1997-11-18 | 1999-06-02 | Toyota Motor Corp | 車両用動画像処理方法および車両用動画像処理装置 |
| JP2004173037A (ja) * | 2002-11-21 | 2004-06-17 | Kyocera Corp | 車載カメラの光軸ずれ検出装置 |
Cited By (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1681577A3 (de) * | 2005-01-12 | 2008-08-20 | Robert Bosch Gmbh | Verfahren für die Bildlagekorrektur eines Monitorbilds |
| EP1681577A2 (de) | 2005-01-12 | 2006-07-19 | Robert Bosch Gmbh | Verfahren für die Bildlagekorrektur eines Monitorbilds |
| FR2896219A1 (fr) * | 2006-01-19 | 2007-07-20 | Valeo Vision Sa | Procede de reglage de l'orientation d'une camera installee dans un vehicule et systeme de mise en oeuvre de ce procede |
| EP1810907A1 (fr) * | 2006-01-19 | 2007-07-25 | Valeo Vision | Procédé de réglage de l'orientation d'une caméra installée dans un véhicule et système de mise ene oeuvre de ce procédé |
| US7864981B2 (en) | 2006-01-19 | 2011-01-04 | Valeo Vision | Method for adjusting the orientation of a camera installed in a vehicle and system for carrying out this method |
| WO2008038370A1 (fr) * | 2006-09-28 | 2008-04-03 | Pioneer Corporation | Détecteur, procédé et programme d'informations de circulation et support d'enregistrement |
| CN102201056A (zh) * | 2010-03-26 | 2011-09-28 | 日产自动车株式会社 | 车辆用环境识别装置以及方法 |
| EP2371648A1 (en) * | 2010-03-26 | 2011-10-05 | Nissan Motor Co., Ltd. | Vehicle environment recognizing apparatus |
| US9592834B2 (en) | 2010-03-26 | 2017-03-14 | Nissan Motor Co., Ltd. | Vehicle environment recognizing apparatus |
| JP2012168845A (ja) * | 2011-02-16 | 2012-09-06 | Fujitsu Ten Ltd | 物体検出装置、および、物体検出方法 |
| JP5636493B2 (ja) * | 2011-03-30 | 2014-12-03 | パイオニア株式会社 | 画像処理装置、及び画像表示装置 |
| WO2012131947A1 (ja) * | 2011-03-30 | 2012-10-04 | パイオニア株式会社 | 画像処理装置、及び画像表示装置 |
| JPWO2013030932A1 (ja) * | 2011-08-29 | 2015-03-23 | パイオニア株式会社 | ナビゲーション装置、画像表示制御装置、サーバ、調整装置、及び前方画像表示制御方法 |
| JP2013195783A (ja) * | 2012-03-21 | 2013-09-30 | Ricoh Co Ltd | 位置ずれ検出装置、車両及び位置ずれ検出方法 |
| JP2014082622A (ja) * | 2012-10-16 | 2014-05-08 | Denso Corp | 車載カメラの取り付け誤差検出装置 |
| JP2014115793A (ja) * | 2012-12-10 | 2014-06-26 | Mitsubishi Electric Corp | 画像処理装置および画像処理方法 |
| WO2017042999A1 (ja) * | 2015-09-07 | 2017-03-16 | パナソニックIpマネジメント株式会社 | 車載用ステレオカメラ装置、およびその補正方法 |
| WO2019130791A1 (ja) | 2017-12-27 | 2019-07-04 | 株式会社Jvcケンウッド | プロジェクタシステム及びカメラ評価システム |
| US11438557B2 (en) | 2017-12-27 | 2022-09-06 | Jvckenwood Corporation | Projector system and camera |
| US11490073B2 (en) | 2018-01-22 | 2022-11-01 | Jvckenwood Corporation | Image display device and camera evaluation system |
| JP2025092724A (ja) * | 2019-12-06 | 2025-06-19 | パイオニア株式会社 | 撮影装置、制御方法、プログラム及び記憶媒体 |
| JP2020053083A (ja) * | 2019-12-06 | 2020-04-02 | パイオニア株式会社 | 撮影装置、制御方法、プログラム及び記憶媒体 |
| JP2021193636A (ja) * | 2019-12-06 | 2021-12-23 | パイオニア株式会社 | 撮影装置、制御方法、プログラム及び記憶媒体 |
| JP7809859B2 (ja) | 2019-12-06 | 2026-02-02 | パイオニア株式会社 | 撮影装置、制御方法、プログラム及び記憶媒体 |
| JP2023133535A (ja) * | 2019-12-06 | 2023-09-22 | パイオニア株式会社 | 撮影装置、制御方法、プログラム及び記憶媒体 |
| CN114093023A (zh) * | 2020-07-31 | 2022-02-25 | 丰田自动车株式会社 | 移动体妨碍检测装置、系统、方法及存储介质 |
| JP7359099B2 (ja) | 2020-07-31 | 2023-10-11 | トヨタ自動車株式会社 | 移動体妨害検出装置、移動体妨害検出システム、及び移動体妨害検出プログラム |
| CN114093023B (zh) * | 2020-07-31 | 2025-11-11 | 丰田自动车株式会社 | 移动体妨碍检测装置 |
| JP2022027306A (ja) * | 2020-07-31 | 2022-02-10 | トヨタ自動車株式会社 | 移動体妨害検出装置、移動体妨害検出システム、及び移動体妨害検出プログラム |
| JP2024065708A (ja) * | 2022-10-31 | 2024-05-15 | トヨタ自動車株式会社 | 車両検査システム、及び車両検査方法 |
| JP7635772B2 (ja) | 2022-10-31 | 2025-02-26 | トヨタ自動車株式会社 | 車両検査システム、及び車両検査方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5276637B2 (ja) | 車線推定装置 | |
| CN102414715B (zh) | 物体检测装置 | |
| JP3711405B2 (ja) | カメラを利用した車両の道路情報抽出方法及びシステム | |
| JP5399027B2 (ja) | 自動車の運転を支援するための、立体画像を捕捉することができるシステムを有するデバイス | |
| JP6988200B2 (ja) | 車両制御装置 | |
| US9740942B2 (en) | Moving object location/attitude angle estimation device and moving object location/attitude angle estimation method | |
| JP4420011B2 (ja) | 物体検知装置 | |
| CN104185588B (zh) | 用于确定道路宽度的车载成像系统及方法 | |
| JP2004247979A (ja) | 車載用カメラ装置 | |
| JP6881369B2 (ja) | 自車位置推定装置 | |
| US10392015B2 (en) | Vehicle control device and vehicle control method | |
| US9360332B2 (en) | Method for determining a course of a traffic lane for a vehicle | |
| JP4832489B2 (ja) | 車線判定装置 | |
| JP6787157B2 (ja) | 車両制御装置 | |
| US20050102070A1 (en) | Vehicle image processing device | |
| JP2007024590A (ja) | 物体検出装置 | |
| JP2007228448A (ja) | 撮像環境認識装置 | |
| JP2017004176A (ja) | 路面標示検出装置及び路面標示検出方法 | |
| JP4265931B2 (ja) | 先行車両検出装置 | |
| JP5090313B2 (ja) | 路面標示認識装置 | |
| JP2020047210A (ja) | 物体検出装置 | |
| JP5559650B2 (ja) | 車線推定装置 | |
| KR20240010860A (ko) | 차량 및 그 제어 방법 | |
| JP5561469B2 (ja) | ヨーレート補正装置、及びその方法 | |
| JP2010020710A (ja) | 路側固定物検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060214 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20060512 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20060512 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080711 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080715 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20081111 |