JP2004255932A - 電動パワーステアリング装置 - Google Patents
電動パワーステアリング装置 Download PDFInfo
- Publication number
- JP2004255932A JP2004255932A JP2003046512A JP2003046512A JP2004255932A JP 2004255932 A JP2004255932 A JP 2004255932A JP 2003046512 A JP2003046512 A JP 2003046512A JP 2003046512 A JP2003046512 A JP 2003046512A JP 2004255932 A JP2004255932 A JP 2004255932A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- current
- current value
- value
- steering angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000007246 mechanism Effects 0.000 claims description 15
- 230000007935 neutral effect Effects 0.000 claims description 12
- 230000009467 reduction Effects 0.000 claims description 10
- 230000001629 suppression Effects 0.000 description 20
- 238000010586 diagram Methods 0.000 description 16
- 230000008859 change Effects 0.000 description 9
- 238000001514 detection method Methods 0.000 description 9
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 5
- 230000007423 decrease Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000013016 damping Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005669 field effect Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 238000006557 surface reaction Methods 0.000 description 1
Images







Landscapes
- Power Steering Mechanism (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
【課題】舵角センサ等が設けられることなく、舵角を推定することにより各種補償のための制御が行われる電動パワーステアリング装置を提供する。
【解決手段】目標電流設定部12は、操舵トルクTを受け取り電流目標値Itの算出基礎となる基本アシスト電流値It’を出力するアシスト電流設定部121と、当該基本アシスト電流値It’に基づき推定舵角θeを出力する舵角推定部122と、この推定舵角θeを受け取りハンドルの戻り時の操舵性を向上させるための戻し制御電流値Irを出力する戻し制御部123と、上記基本アシスト電流値It’に戻し制御電流値Irを加算することにより得られる上記電流目標値Itを出力する加算器124とを含む。この舵角推定部122により舵角を検知するセンサを必要とすることなく、推定舵角θeに基づく戻し制御部123などの各種補償を行うことができる。
【選択図】 図3
【解決手段】目標電流設定部12は、操舵トルクTを受け取り電流目標値Itの算出基礎となる基本アシスト電流値It’を出力するアシスト電流設定部121と、当該基本アシスト電流値It’に基づき推定舵角θeを出力する舵角推定部122と、この推定舵角θeを受け取りハンドルの戻り時の操舵性を向上させるための戻し制御電流値Irを出力する戻し制御部123と、上記基本アシスト電流値It’に戻し制御電流値Irを加算することにより得られる上記電流目標値Itを出力する加算器124とを含む。この舵角推定部122により舵角を検知するセンサを必要とすることなく、推定舵角θeに基づく戻し制御部123などの各種補償を行うことができる。
【選択図】 図3
Description
【0001】
【発明の属する技術分野】
本発明は、電動モータによって車両のステアリング機構に操舵補助力を与える電動パワーステアリング装置に関する。
【0002】
【従来の技術】
従来から、運転者がハンドル(ステアリングホイール)に加える操舵トルクに応じて電動モータを駆動することによりステアリング機構に操舵補助力を与える電動パワーステアリング装置が用いられている。この電動パワーステアリング装置では、操舵のための操作手段であるハンドルに加えられる操舵トルクを検出して当該操舵トルクを示すトルク検出信号を出力するトルクセンサが設けられており、そのトルクセンサからのトルク検出信号に基づき電動モータに流すべき電流の目標値が設定される。なお、この目標値の設定には、予め定められたトルク値と電流値との対応関係を示すテーブル(「アシストテーブル」と呼ばれる)が用いられる。そして、比例積分制御器によりこの目標値と電動モータに実際に流れる電流の検出値との偏差に基づき、電動モータの駆動手段に与えるべき指令値が生成される。電動モータの駆動手段は、その指令値に応じたデューティ比のパルス幅変調信号(PWM信号)を生成するPWM信号生成回路と、そのPWM信号のデューティ比に応じてオン/オフするパワートランジスタを用いて構成されるモータ駆動回路とから成り、そのデューティ比に応じた電圧すなわち指令値に応じた電圧を電動モータに印加する。この電圧印加によって電動モータに流れる電流は電流検出回路によって検出され、上記目標値とこの検出値との差が上記指令値を生成するための偏差として使用される。
【0003】
以上のように、従来の電動パワーステアリング装置では、電動モータに流すべき電流の目標値は操舵トルクに応じて決定されるが、さらに詳しくは、操舵トルクに応じて決定され操舵補助力を与えるために電動モータに流すべき電流の目標値(「基本アシスト電流値」と呼ばれる)に対して、操舵操作の操作性を向上させる各種補償のための(正値または負値の)電流値が加算されることにより、電動モータに流すべき電流の目標値が決定されることが多い。この補償を行うための制御には、従来より、ハンドルの戻り時の操舵性を向上させるための戻し制御や、ハンドルの戻り時にハンドルが所定の中立位置を超えて回転することを防止する収斂制御(ダンピング制御)などがある。
【0004】
上記戻し制御は、車輪が直進方向に戻ろうとする力(「セルフアライニングトルク」と呼ばれる)が小さい車両、すなわちハンドルの戻りが悪い車両について、ハンドルの回転角度(舵角)またはその変化速度(操舵角速度)に基づき、ハンドルを戻すように行われる。この戻し制御により、ハンドルが速く中立位置に戻るため、ハンドルが中立位置に戻らないで止まった状態での舵角(以下「残留舵角」という)が大きくなることを防止することができる。図8はこの残留舵角を示す図である。
【0005】
また、上記収斂制御は、セルフアライニングトルクが大きい車両、すなわちハンドルの戻りがきつい車両について、舵角や操舵角速度に基づきハンドルが所定の中立位置を超えて回転しないように行われる。
【0006】
ここで、上記各種補償のための制御で必要とされる舵角は、通常、ハンドル近傍に設けられる舵角センサにより検出される。また、特開2002−104211号公報では、舵角センサに代えてモータの回転角速度を検出する角速度センサが設けられており、このセンサで検出される角速度を積分することにより上記舵角を推定する構成が開示されている。
【0007】
【特許文献1】
特開2002−104211号公報
【0008】
【発明が解決しようとする課題】
以上のように、従来の電動パワーステアリング装置では、上記各種補償のための制御において必要となる舵角または操舵角速度を検出するためのセンサが不可欠となるので、装置のコストが高くなる。さらに、操舵角速度に基づき上記補償が行われる構成では、舵角がほとんど変化しない場合(運転者によりハンドルが所定の角度で維持される場合)には操舵角速度を検出することができないため制御量が得られない。
【0009】
また、従来の電動パワーステアリング装置では、車輪が直進方向に戻ろうとする力(「セルフアライニングトルク」と呼ばれる)が大きい車両、すなわちハンドルの戻りがきつい車両につき、以下のような問題点がある。すなわち、ハンドルの戻り時にハンドルが中立位置を超えて回転する挙動が、当該中立位置に収斂する減衰振動として繰り返されることがある。この振動を以下ではハンドル振動という。上記車両ではハンドルの戻りがきついため、このハンドル振動の周期が短くなる(周波数が高くなる)。具体的には、手放し操作時に車両が短い周期で左右に振れることになり、場合により運転者がその挙動に対して不安感または違和感を覚えることがあり得る。ここで上述の収斂制御が行われる場合、ハンドル振動は低減されるが、ハンドルの回転が抑えられるためハンドルを切り込む際の操舵感が大きく犠牲になることがある。
【0010】
そこで、本発明の目的は、舵角センサおよび操舵角速度センサが設けられることなく、舵角を推定することにより各種補償のための制御が行われる電動パワーステアリング装置を提供することである。
【0011】
また、本発明のさらなる目的は、セルフアライニングトルクが大きい車両においてもハンドル振動の周期が短くなることのない電動パワーステアリング装置を提供することである。
【0012】
【課題を解決するための手段および発明の効果】
第1の発明は、車両操舵のための操作手段によって加えられる操舵トルクに応じて電動モータを駆動することにより当該車両のステアリング機構に操舵補助力を与える電動パワーステアリング装置であって、
前記操舵トルクを検出するトルクセンサと、
前記電動モータに供給すべき電流の目標値を設定する目標値設定手段と、
前記電流目標値と前記電動モータに流れる電流との電流偏差に基づき、前記電動モータに対してフィードバック制御を行う制御手段と
を備え、
前記目標値設定手段は、
前記操舵トルクに基づき、前記操舵補助力を与えるために前記電動モータに供給すべき電流の目標値である基本アシスト電流値を算出するアシスト電流算出手段と、
前記操舵トルクおよび前記基本アシスト電流値の一方または双方に基づき、前記操作手段の操作による操舵角または前記車両の車輪の転舵角のいずれかを示す舵角の推定値である推定舵角を算出する舵角推定手段と、
前記推定舵角に基づき前記車両操舵の操作性を向上させるための補償電流値を設定する補償電流値設定手段と、
前記基本アシスト電流値を前記補償電流値によって補正することにより前記電流目標値を算出する補正手段と
を含むことを特徴とする。
【0013】
このような第1の発明によれば、舵角推定手段により推定舵角が算出されるので、車両に舵角センサ(および操舵角速度センサ)を備えることなく、推定舵角に基づき操舵操作の操作性を向上させるための各種補償を行うことができる。
【0014】
第2の発明は、第1の発明において、
前記補償電流値設定手段は、前記操作手段の所定の中立位置への戻し操作における操作性を向上させる戻し制御のための補償電流値を設定することを特徴とする。
【0015】
このような第2の発明によれば、車両に舵角センサ(および操舵角速度センサ)を備えることなく、戻し制御のための補償電流値が付加される。このようにして補正された操舵補助力が電動モータにより与えられるため、典型的にはセルフアライニングトルクの小さい車両における残留舵角を小さくすることができる。よって、操作手段を精度よく戻す操作が可能となる等、操作手段の操作性を良好に保つことができる。
【0016】
第3の発明は、第1の発明において、
前記補償電流値設定手段は、前記車両のステアリング機構を含む装置全体のバネ力低減に相当する補償電流値を設定することを特徴とする。
【0017】
このような第3の発明によれば、車両に舵角センサ(および操舵角速度センサ)を備えることなく、装置全体のバネ力低減に相当する補償電流値が付加される。このようにして補正された操舵補助力が電動モータにより与えられるため、典型的にはセルフアライニングトルクの大きい車両においても操作手段の振動周期を長くすることができ、かつ振幅も小さくすることができる。よって、操作手段を切り込む際の操舵感を犠牲にすることなく、運転者が操作手段の挙動に対して不安感または違和感を覚えることがない状態を保つことができる。
【0018】
第4の発明は、車両操舵のための操作手段によって加えられる操舵トルクに応じて電動モータを駆動することにより当該車両のステアリング機構に操舵補助力を与える電動パワーステアリング装置であって、
前記操舵トルクを検出するトルクセンサと、
前記操作手段の操作による操舵角または前記車両の車輪の転舵角のいずれかを示す舵角を検出する舵角センサと、
前記電動モータに供給すべき電流の目標値を設定する目標値設定手段と、
前記電流目標値と前記電動モータに流れる電流との電流偏差に基づき、前記電動モータに対してフィードバック制御を行う制御手段と
を備え、
前記目標値設定手段は、
前記車両のステアリング機構を含む装置全体のバネ力低減に相当する補償電流値を設定する補償電流値設定手段と、
前記操舵トルクに基づき前記操舵補助力を与えるために前記電動モータに供給すべき電流の目標値である基本アシスト電流値を算出し、算出された当該基本アシスト電流値を前記補償電流値によって補正することにより前記電流目標値を設定する目標値算出手段と
を含むことを特徴とする。
【0019】
このような第4の発明によれば、舵角センサからの舵角に基づき装置全体のバネ力低減に相当する補償電流値が付加される。このようにして補正された操舵補助力が電動モータにより与えられるため、第3の発明と同様に操作手段の振動周期を長くすることができ、操作手段を切り込む際の操舵感を犠牲にすることなく、運転者が操作手段の挙動に対して不安感または違和感を覚えることがない状態を保つことができる。
【0020】
【発明の実施の形態】
以下、添付図面を参照して本発明の各実施形態について説明する。
<1.第1の実施形態>
<1.1 全体構成>
図1は、本発明の第1の実施形態に係る電動パワーステアリング装置の構成を、それに関連する車両構成と共に示した概略図である。この電動パワーステアリング装置は、操舵のための操作手段としてのハンドル(ステアリングホイール)100に一端が固着されるステアリングシャフト102と、そのステアリングシャフト102の他端に連結されたラックピニオン機構104と、ハンドル100の操作によってステアリングシャフト102に加えられる操舵トルクを検出するトルクセンサ3と、この電動パワーステアリング装置が搭載される車両の車速を検出する車速センサ4と、ハンドル操作(操舵操作)による運転者の負荷を軽減するための操舵補助力を発生させる電動モータ6と、そのモータ6の発生する操舵補助力をステアリングシャフト102に伝達する減速ギヤ7と、車載バッテリ8からイグニションスイッチ9を介して電源の供給を受け、トルクセンサ3、および車速センサ4からのセンサ信号に基づきモータ6の駆動を制御する電子制御ユニット(ECU)5とを備えている。
【0021】
ここで、ステアリングシャフト102において、ハンドル100側の部分と、減速ギヤ7を介して操舵補助トルクの加えられる部分との間にはトーションバーが介装されている。トルクセンサ3は、そのトーションバーのねじれを検出することにより操舵トルクを検出する。このようにして検出された操舵トルクの検出値Tは、操舵トルク検出信号としてトルクセンサ3から出力され、ECU5に入力される。また、車速センサ4は、車両の走行速度である車速の検出値Vを示す信号を車速信号として出力する。この車速信号もECU5に入力される。
【0022】
このような電動パワーステアリング装置を搭載した車両において運転者がハンドル100を操作すると、その操作による操舵トルクがトルクセンサ3によって検出され、その操舵トルクの検出値Tと車速センサ4によって検出された車速の検出値Vとに基づいてECU5によりモータ6が駆動される。これによりモータ6は操舵補助力を発生し、この操舵補助力が減速ギヤ7を介してステアリングシャフト102に加えられることにより、操舵操作による運転者の負荷が軽減される。すなわち、ハンドル操作によって加えられる操舵トルクと、モータ6の発生する操舵補助力によるトルクとの和が出力トルクとして、ステアリングシャフト102を介してラックピニオン機構104に与えられる。これによりピニオン軸が回転すると、その回転がラックピニオン機構104によってラック軸の往復運動に変換される。ラック軸の両端はタイロッドおよびナックルアームから成る連結部材106を介して車輪108に連結されており、ラック軸の往復運動に応じて車輪108の向きが変わる。
【0023】
<1.2 制御装置の構成および動作>
図2は、上記電動パワーステアリング装置における制御装置であるECU5の機能的構成を示すブロック図である。このECU5は、モータ制御部として機能するマイクロコンピュータ(以下「マイコン」と略記する)10と、そのマイコン10から出力される指令値Dに応じたデューティ比のパルス幅変調信号(PWM信号)を生成するPWM信号生成回路18と、そのPWM信号のデューティ比に応じた電圧をモータ6に印加するモータ駆動回路20と、モータ6に流れる電流を検出する電流検出器19とから構成される。
【0024】
マイコン10は、その内部のメモリに格納された所定のプログラムを実行することにより、目標電流設定部12と減算器14とフィードバック制御演算部(以下「FB制御演算部」と略記する)16とからなるモータ制御部として機能する。このモータ制御部において、目標電流設定部12は、トルクセンサ3から出力される操舵トルクの検出値T(以下、単に「操舵トルクT」という)と、車速センサ4から出力される車速の検出値V(以下、単に「車速V」という)とに基づき、モータ6に流すべき電流の目標値Itを決定する。この目標電流設定部12の詳細な構成および動作については後述する。減算器14は、この目標電流設定部12から出力される電流目標値Itと電流検出器19から出力されるモータ電流の検出値Isとの偏差It−Isを算出する。FB制御演算部16は、この偏差It−Isに基づく比例積分制御演算によって、PWM信号生成回路18に与えるべきフィードバック制御のための上記指令値Dを生成する。
【0025】
PWM信号生成回路18は、この指令値Dに応じたデューティ比のパルス信号、すなわち指令値Dに応じてパルス幅の変化するPWM信号を生成する。モータ駆動回路20は、典型的にはバッテリ8の電源ラインと接地ラインとの間に接続される4個の電力用の電界効果型トランジスタからなるブリッジ回路であって、PWM信号のパルス幅(デューティ比)に応じた電圧をモータ6に印加する。モータ6は、その電圧印加によって流れる電流に応じた大きさおよび方向のトルクを発生する。このように、電流目標値Itを受け取る減算器14、FB制御演算部16、PWM信号生成回路18、モータ駆動回路20、およびモータ電流の検出値Isを減算器14へ出力する電流検出器19は、モータ6に対するフィードバック制御を行う制御手段を構成する。なお、上記電動モータ6はブラシ付きの一般的な直流モータであるが、本発明における駆動手段としての電動モータは、上記モータに限定されるものではなく、例えばブラシレスモータであってもよい。
【0026】
<1.3 目標電流設定部の詳細な構成および動作>
図3は、上記第1の実施形態における目標電流設定部12の構成を示すブロック図である。この目標電流設定部12は、操舵トルクTを受け取り電流目標値Itを算出する基礎となる値であって操舵補助力を与えるために電動モータに流すべき電流の目標値である基本アシスト電流値It’を出力するアシスト電流設定部121と、当該基本アシスト電流値It’に基づきハンドル100の回転角度である舵角の推定値θe(以下「推定舵角θe」という)を出力する舵角推定部122と、この推定舵角θeを受け取りハンドルの戻り時の操舵性を向上させるための戻し制御電流値Irを出力する戻し制御部123と、上記基本アシスト電流値It’に戻し制御電流値Irを加算することにより得られる上記電流目標値Itを出力する加算器124とを含む。なお、本発明における舵角は、ハンドルの回転角度または直進方向に対するタイヤの方向角である転舵角のいずれであってもよいが、説明の便宜のため、以下では舵角はハンドルの回転角度を示すものとして説明する。また、上記操舵トルクTは、所定のパラメータを有する位相進み等のフィルタからなる図示されない位相補償器を通すことにより位相補償が行われてもよい。以下、目標電流設定部12の各構成要素の動作について詳細に説明する。
【0027】
なお、以下では、マイコン10が所定のプログラムを実行することにより、目標電流設定部12における各種構成要素がソフトウェア的に実現されるように構成されるが、これらの構成要素の一部または全部は、専用の電子回路等によりハードウェア的に実現されてもよい。
【0028】
アシスト電流設定部121は、トルクセンサ3からの操舵トルクTと車速Vとに基づき基本アシスト電流値It’を算出する。具体的には、適切な操舵補助力を発生させるためにモータ6に供給すべき電流目標値を算出するための基礎となる基本アシスト電流値It’と操舵トルクTとの関係を車速Vをパラメータとして示すアシストテーブルがアシスト電流設定部121に予め保持されており、アシスト電流設定部121は、このアシストテーブルを参照して基本アシスト電流値It’を設定する。このアシストテーブルは、車速Vが小さいほど、また操舵トルクTが大きいほど基本アシスト電流値It’を大きくするように設定される。そうすれば、ハンドルが重いときほど操舵補助力が大きくなり、操舵操作が容易になる。
【0029】
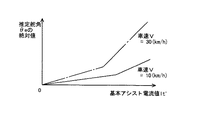
舵角推定部122には、上記アシストテーブルのように、基本アシスト電流値It’と推定舵角θeとの関係を車速Vをパラメータとして示すテーブル(以下「舵角推定テーブル」という)が内部に予め保持されており、舵角推定部122は、この舵角推定テーブルを参照して推定舵角θeを算出する。図4は、この舵角推定テーブルを例示する図である。図では、実線で示される車速Vが10km/hであるとき、および一点鎖線で示される車速Vが30km/hであるときの、推定舵角θeの絶対値と基本アシスト電流値It’との関係が示されている。なお、図では上記2種類の車速Vに関する関係のみが例示されているが、実際にはさらに多くの種類の車速に関する関係が含まれる。もっとも、舵角推定テーブルは、基本アシスト電流値It’と推定舵角θeとの関係を示していれば足りるため、車速Vをパラメータとしない構成も考えられる。図示される舵角推定テーブルは、車速Vが大きいほど、また基本アシスト電流値It’が大きいほど、推定舵角θeが大きくなるように設定されている。舵角推定テーブルは、特に舵角が比較的小さな値であるときに、舵角と車速Vおよび基本アシスト電流値It’との間に強い相関関係が見られることから、典型的には実測値に基づき予め決定される。なお、上記舵角推定テーブルに代えて、上記相関関係を示す所定の関数式等に基づき推定舵角θeが算出されてもよい。
【0030】
戻し制御部123は、上記舵角推定部122から与えられる推定舵角θeに基づき、ハンドルを戻すように作用する戻し制御電流値Irを出力する。この戻し制御部123には、具体的には、上記戻し制御電流値Irと推定舵角θeとの関係を示すテーブルまたは戻し制御電流値Irを算出するために推定舵角θeに乗算されるべき所定のゲインKrが予め保持されている。戻し制御部123は、このテーブルまたはゲインKrに基づき戻し制御電流値Irを設定する。なお、このテーブルは、アシストテーブルや舵角推定テーブルと同様に、車速Vをパラメータとして上記関係を示すテーブルであってもよい。以上のように設定される戻し制御電流値Irは、加算器124により基本アシスト電流値It’に加算され、当該加算値(加算結果)は電流目標値Itとして出力される。以下、戻し制御部123により行われる制御動作につき詳述する。
【0031】
<1.4 戻し制御部の制御動作>
上述のように、残留舵角を小さくするために戻し制御部123により推定舵角θeに基づき制御が行われるのは以下の理由による。本電動パワーステアリング装置のハンドル100から車輪108までの機構の運動方程式は、ハンドル軸に換算した場合、一般的には次式(1)のように表される。
【数1】
 【0032】
【0032】
ここで、Tはトルクを示し、θは舵角を示し、Jはイナーシャ(慣性係数)を示し、cは粘性係数(ダンピング係数)を示し、kはバネ定数(バネ力)を示す。また、上式(1)に示す系の共振周波数fは、次式(2)のように示される。
【数2】
【0033】
この共振周波数fが高いほどハンドルの回転周波数が高くなるため、上式(2)の分子であるkを大きくするように電動モータ6の制御を行うことにより、ハンドルの戻りを速くすることができる。ここで、現実のバネ力kは、本電動パワーステアリング装置のハンドル100から車輪108までの機構の剛性、タイヤ自体の剛性、またはタイヤの転舵角に応じて生じる路面反力などに基づくほぼ固定された値であるため、これらの特性を自在に変更することは極めて困難である。しかし、ハンドルを中立位置に戻すように上記バネ力付加に相当する戻し制御電流が設定されるときには、現実のバネ力は変化しなくてもバネ力が見かけ上は大きくなったものとして取り扱うことができるため、ハンドルの戻りが速くなる。したがって、kを見かけ上大きくするように電動モータ6の制御を行うことにより、残留舵角を小さくすることができる。そこで、戻し制御部123は、推定舵角θeに基づきバネ力付加に相当する戻し制御電流値Irを上記テーブルまたはゲインKrに基づき出力する。
【0034】
図5は戻し制御部により残留舵角が小さくなることを示す図である。図中の点線は、戻し制御部123による上記制御が行われない場合の舵角の時間変化を示し、実線は、戻し制御部123による制御が行われる場合の舵角の時間変化を示す。図示されるように、戻し制御部123によってハンドルが中立位置に戻るため、ハンドルが中立位置に戻らないで止まった状態での舵角(残留舵角)を小さく(典型的にはゼロに)することができる。
【0035】
<1.5 効果>
以上のように、上記第1の実施形態によれば、舵角推定部122により推定舵角θeが算出される。このことにより、車両に舵角センサ(および操舵角速度センサ)を備えることなく、舵角に基づく戻し制御を含む各種補償を行うことができる。また、上記第1の実施形態によれば、戻し制御部123によりバネ力付加に相当する戻し制御電流値Irが付加される。このようにして補正された操舵補助力が電動モータにより与えられるため、典型的にはセルフアライニングトルクの小さい車両における残留舵角を小さくすることができる。よって、ハンドルを精度よく戻す操作が可能となる等、ハンドル操作の操作性を良好に保つことができる。
【0036】
<2.第2の実施形態>
本発明の第2の実施形態に係る電動パワーステアリング装置は、上記第1の実施形態の場合とは異なり、セルフアライニングトルクの大きい車両に搭載される。この電動パワーステアリング装置の構成は、図1および図2に示す上記第1の実施形態とほぼ同様であるため、同一の構成要素については同一の参照符号を付して説明を省略する。図6は、本実施形態における目標電流設定部の構成を示すブロック図である。この目標電流設定部12は、第1の実施形態における戻し制御部123に代えて、ハンドル振動抑制部223が備えられる点が異なる。以下、このハンドル振動抑制部223について説明する。
【0037】
ハンドル振動抑制部223は、前述したハンドル振動の周期が短くなることを防止するための振動抑制電流値Icを出力する。このハンドル振動抑制部223には、振動抑制電流値Icと推定舵角θeとの関係を示すテーブルまたは振動抑制電流値Icを算出するために推定舵角θeに乗算されるべき所定のゲインKcが予め保持されている。ハンドル振動抑制部223は、このテーブルまたはゲインKcに基づき振動抑制電流値Icを設定する。
【0038】
ここで、ハンドル振動の周波数は、上式(2)に示す共振周波数fが低いほどが低くなる。すなわち共振周波数fが低いほどハンドル振動の周期が長くなる。よって、上式(2)の分子であるkを小さくするように電動モータ6の制御を行うことにより、ハンドル振動の周期を長くすることができる。もっとも、上述のように、現実のバネ力kを自在に変更することは極めて困難であるが、バネ力低減に相当する振動抑制電流が設定されるときには、現実のバネ力は変化しなくてもバネ力が見かけ上は小さくなったものとして取り扱うことができるため、ハンドル振動の周期が長くなる。したがって、kを見かけ上小さくするように電動モータ6の制御を行うことにより、ハンドル振動の周期が短くなることを防止することができる。そこで、ハンドル振動抑制部223は、推定舵角θeに基づきバネ力を低減させることに相当する振動抑制電流値Icを上記テーブルまたはゲインKcに基づき出力する。
【0039】
図7は、ハンドル振動抑制部223により短い周期のハンドル振動が防止されることを示す図である。図中の点線は、ハンドル振動抑制部223による上記制御が行われない場合の舵角の時間変化を示し、実線は、ハンドル振動抑制部223による制御が行われる場合の舵角の時間変化を示す。図示されるように、ハンドル振動抑制部223によってバネ力が低減される(ように取り扱うことができる)ことにより共振周波数は低くなり、かつ同一時刻における振幅(すなわちハンドルの中立位置からの舵角の大きさ)も小さくなるため、ハンドル振動の周期が長くなり、かつその振幅も小さくなる。
【0040】
以上のように、上記第2の実施形態によれば、第1の実施形態と同様に舵角センサ(および操舵角速度センサ)を備えることなく、舵角に基づく制御を行うことができる。また、上記第2の実施形態によれば、ハンドル振動抑制部223により共振周波数が低くなるように制御される。このようにして補正された操舵補助力が電動モータにより与えられるため、典型的にはセルフアライニングトルクの大きい車両においてもハンドル振動の周期を長くすることができ、かつ振幅も小さくすることができる。よって、ハンドルを切り込む際の操舵感を犠牲にすることなく、運転者がハンドルの挙動に対して不安感または違和感を覚えることがない状態を保つことができる。
【0041】
<3.第1および第2の実施形態の変形例>
上記第1および第2の実施形態における舵角推定部122は、舵角に代わる推定舵角θeを算出するため、舵角センサを省略することができるが、本発明では、第1の実施形態における戻し制御部123または第2の実施形態におけるハンドル振動抑制部223のほか、(推定)舵角に基づき操舵操作の操作性を高めるための各種補償手段または制御手段に広く適用することができる。
【0042】
上記第1および第2の実施形態における舵角推定部122は、アシスト電流設定部121からの基本アシスト電流値It’を受け取るが、これに代えてトルクセンサ3からの操舵トルク値Tを受け取り、この操舵トルク値Tと車速Vとに基づき推定舵角θeを算出してもよい。すなわち、舵角推定部122には、操舵トルク値Tと推定舵角θeとの関係を車速Vをパラメータとして示す舵角推定テーブルが内部に予め保持されており、舵角推定部122は、この舵角推定テーブルを参照して推定舵角θeを算出する。この舵角推定テーブルも前述と同様に、特に舵角が比較的小さな値であるときに、舵角と車速Vおよび操舵トルク値Tとの間に強い相関関係が見られることから、典型的には実測値に基づき予め決定される。なお、舵角推定部122は、基本アシスト電流値It’および操舵トルク値Tを受け取り、これらの双方に基づき推定舵角θeを算出してもよい。また、上記舵角推定テーブルに代えて、上記相関関係を示す所定の関数式等に基づき推定舵角θeが算出されてもよい。
【0043】
上記第2の実施形態におけるハンドル振動抑制部223は、舵角推定部122からの舵角推定値θeを受け取るが、舵角推定部122が省略されて、これに代えて設けられる舵角センサからの実際の舵角がハンドル振動抑制部223に与えられる構成でもよい。この構成では、舵角センサが必要となるが、実際の舵角に基づいてより正確なハンドル振動抑制部223による制御が行われるため、ハンドル振動の周期を長くすることができ、かつ振幅も小さくすることができる。
【図面の簡単な説明】
【図1】本発明の第1の実施形態に係る電動パワーステアリング装置の構成をそれに関連する車両構成と共に示す概略図である。
【図2】上記実施形態に係る電動パワーステアリング装置における制御装置であるECUの機能的構成を示すブロック図である。
【図3】上記実施形態における目標電流設定部の構成を示すブロック図である。
【図4】上記実施形態における舵角推定テーブルを例示する図である。
【図5】上記実施形態における戻し制御部により残留舵角が小さくなることを示す図である。
【図6】本発明の第2の実施形態における目標電流設定部の構成を示すブロック図である。
【図7】第2の実施形態におけるハンドル振動抑制部により短い周期のハンドル振動が防止されることを示す図である。
【図8】従来の電動パワーステアリング装置において生じる残留舵角を示す図である。
【符号の説明】
3 …トルクセンサ
4 …車速センサ
5 …電子制御ユニット(ECU)
6 …モータ
10 …マイクロコンピュータ(モータ制御部)
12 …目標電流設定部(目標値設定手段)
14 …減算器
16 …フィードバック制御演算部(FB制御演算部)
18 …PWM信号生成回路
19 …電流検出器
20 …モータ駆動回路
121 …アシスト電流設定部
122 …舵角推定部
123 …戻し制御部(補償電流値設定手段)
124 …加算器
223 …ハンドル振動抑制部(補償電流値設定手段)
It …電流目標値
It’…基本アシスト電流値
Is …電流検出値
Ir …戻し制御電流値
Ic …振動抑制電流値
V …車速
T …操舵トルク
θe …推定舵角
【発明の属する技術分野】
本発明は、電動モータによって車両のステアリング機構に操舵補助力を与える電動パワーステアリング装置に関する。
【0002】
【従来の技術】
従来から、運転者がハンドル(ステアリングホイール)に加える操舵トルクに応じて電動モータを駆動することによりステアリング機構に操舵補助力を与える電動パワーステアリング装置が用いられている。この電動パワーステアリング装置では、操舵のための操作手段であるハンドルに加えられる操舵トルクを検出して当該操舵トルクを示すトルク検出信号を出力するトルクセンサが設けられており、そのトルクセンサからのトルク検出信号に基づき電動モータに流すべき電流の目標値が設定される。なお、この目標値の設定には、予め定められたトルク値と電流値との対応関係を示すテーブル(「アシストテーブル」と呼ばれる)が用いられる。そして、比例積分制御器によりこの目標値と電動モータに実際に流れる電流の検出値との偏差に基づき、電動モータの駆動手段に与えるべき指令値が生成される。電動モータの駆動手段は、その指令値に応じたデューティ比のパルス幅変調信号(PWM信号)を生成するPWM信号生成回路と、そのPWM信号のデューティ比に応じてオン/オフするパワートランジスタを用いて構成されるモータ駆動回路とから成り、そのデューティ比に応じた電圧すなわち指令値に応じた電圧を電動モータに印加する。この電圧印加によって電動モータに流れる電流は電流検出回路によって検出され、上記目標値とこの検出値との差が上記指令値を生成するための偏差として使用される。
【0003】
以上のように、従来の電動パワーステアリング装置では、電動モータに流すべき電流の目標値は操舵トルクに応じて決定されるが、さらに詳しくは、操舵トルクに応じて決定され操舵補助力を与えるために電動モータに流すべき電流の目標値(「基本アシスト電流値」と呼ばれる)に対して、操舵操作の操作性を向上させる各種補償のための(正値または負値の)電流値が加算されることにより、電動モータに流すべき電流の目標値が決定されることが多い。この補償を行うための制御には、従来より、ハンドルの戻り時の操舵性を向上させるための戻し制御や、ハンドルの戻り時にハンドルが所定の中立位置を超えて回転することを防止する収斂制御(ダンピング制御)などがある。
【0004】
上記戻し制御は、車輪が直進方向に戻ろうとする力(「セルフアライニングトルク」と呼ばれる)が小さい車両、すなわちハンドルの戻りが悪い車両について、ハンドルの回転角度(舵角)またはその変化速度(操舵角速度)に基づき、ハンドルを戻すように行われる。この戻し制御により、ハンドルが速く中立位置に戻るため、ハンドルが中立位置に戻らないで止まった状態での舵角(以下「残留舵角」という)が大きくなることを防止することができる。図8はこの残留舵角を示す図である。
【0005】
また、上記収斂制御は、セルフアライニングトルクが大きい車両、すなわちハンドルの戻りがきつい車両について、舵角や操舵角速度に基づきハンドルが所定の中立位置を超えて回転しないように行われる。
【0006】
ここで、上記各種補償のための制御で必要とされる舵角は、通常、ハンドル近傍に設けられる舵角センサにより検出される。また、特開2002−104211号公報では、舵角センサに代えてモータの回転角速度を検出する角速度センサが設けられており、このセンサで検出される角速度を積分することにより上記舵角を推定する構成が開示されている。
【0007】
【特許文献1】
特開2002−104211号公報
【0008】
【発明が解決しようとする課題】
以上のように、従来の電動パワーステアリング装置では、上記各種補償のための制御において必要となる舵角または操舵角速度を検出するためのセンサが不可欠となるので、装置のコストが高くなる。さらに、操舵角速度に基づき上記補償が行われる構成では、舵角がほとんど変化しない場合(運転者によりハンドルが所定の角度で維持される場合)には操舵角速度を検出することができないため制御量が得られない。
【0009】
また、従来の電動パワーステアリング装置では、車輪が直進方向に戻ろうとする力(「セルフアライニングトルク」と呼ばれる)が大きい車両、すなわちハンドルの戻りがきつい車両につき、以下のような問題点がある。すなわち、ハンドルの戻り時にハンドルが中立位置を超えて回転する挙動が、当該中立位置に収斂する減衰振動として繰り返されることがある。この振動を以下ではハンドル振動という。上記車両ではハンドルの戻りがきついため、このハンドル振動の周期が短くなる(周波数が高くなる)。具体的には、手放し操作時に車両が短い周期で左右に振れることになり、場合により運転者がその挙動に対して不安感または違和感を覚えることがあり得る。ここで上述の収斂制御が行われる場合、ハンドル振動は低減されるが、ハンドルの回転が抑えられるためハンドルを切り込む際の操舵感が大きく犠牲になることがある。
【0010】
そこで、本発明の目的は、舵角センサおよび操舵角速度センサが設けられることなく、舵角を推定することにより各種補償のための制御が行われる電動パワーステアリング装置を提供することである。
【0011】
また、本発明のさらなる目的は、セルフアライニングトルクが大きい車両においてもハンドル振動の周期が短くなることのない電動パワーステアリング装置を提供することである。
【0012】
【課題を解決するための手段および発明の効果】
第1の発明は、車両操舵のための操作手段によって加えられる操舵トルクに応じて電動モータを駆動することにより当該車両のステアリング機構に操舵補助力を与える電動パワーステアリング装置であって、
前記操舵トルクを検出するトルクセンサと、
前記電動モータに供給すべき電流の目標値を設定する目標値設定手段と、
前記電流目標値と前記電動モータに流れる電流との電流偏差に基づき、前記電動モータに対してフィードバック制御を行う制御手段と
を備え、
前記目標値設定手段は、
前記操舵トルクに基づき、前記操舵補助力を与えるために前記電動モータに供給すべき電流の目標値である基本アシスト電流値を算出するアシスト電流算出手段と、
前記操舵トルクおよび前記基本アシスト電流値の一方または双方に基づき、前記操作手段の操作による操舵角または前記車両の車輪の転舵角のいずれかを示す舵角の推定値である推定舵角を算出する舵角推定手段と、
前記推定舵角に基づき前記車両操舵の操作性を向上させるための補償電流値を設定する補償電流値設定手段と、
前記基本アシスト電流値を前記補償電流値によって補正することにより前記電流目標値を算出する補正手段と
を含むことを特徴とする。
【0013】
このような第1の発明によれば、舵角推定手段により推定舵角が算出されるので、車両に舵角センサ(および操舵角速度センサ)を備えることなく、推定舵角に基づき操舵操作の操作性を向上させるための各種補償を行うことができる。
【0014】
第2の発明は、第1の発明において、
前記補償電流値設定手段は、前記操作手段の所定の中立位置への戻し操作における操作性を向上させる戻し制御のための補償電流値を設定することを特徴とする。
【0015】
このような第2の発明によれば、車両に舵角センサ(および操舵角速度センサ)を備えることなく、戻し制御のための補償電流値が付加される。このようにして補正された操舵補助力が電動モータにより与えられるため、典型的にはセルフアライニングトルクの小さい車両における残留舵角を小さくすることができる。よって、操作手段を精度よく戻す操作が可能となる等、操作手段の操作性を良好に保つことができる。
【0016】
第3の発明は、第1の発明において、
前記補償電流値設定手段は、前記車両のステアリング機構を含む装置全体のバネ力低減に相当する補償電流値を設定することを特徴とする。
【0017】
このような第3の発明によれば、車両に舵角センサ(および操舵角速度センサ)を備えることなく、装置全体のバネ力低減に相当する補償電流値が付加される。このようにして補正された操舵補助力が電動モータにより与えられるため、典型的にはセルフアライニングトルクの大きい車両においても操作手段の振動周期を長くすることができ、かつ振幅も小さくすることができる。よって、操作手段を切り込む際の操舵感を犠牲にすることなく、運転者が操作手段の挙動に対して不安感または違和感を覚えることがない状態を保つことができる。
【0018】
第4の発明は、車両操舵のための操作手段によって加えられる操舵トルクに応じて電動モータを駆動することにより当該車両のステアリング機構に操舵補助力を与える電動パワーステアリング装置であって、
前記操舵トルクを検出するトルクセンサと、
前記操作手段の操作による操舵角または前記車両の車輪の転舵角のいずれかを示す舵角を検出する舵角センサと、
前記電動モータに供給すべき電流の目標値を設定する目標値設定手段と、
前記電流目標値と前記電動モータに流れる電流との電流偏差に基づき、前記電動モータに対してフィードバック制御を行う制御手段と
を備え、
前記目標値設定手段は、
前記車両のステアリング機構を含む装置全体のバネ力低減に相当する補償電流値を設定する補償電流値設定手段と、
前記操舵トルクに基づき前記操舵補助力を与えるために前記電動モータに供給すべき電流の目標値である基本アシスト電流値を算出し、算出された当該基本アシスト電流値を前記補償電流値によって補正することにより前記電流目標値を設定する目標値算出手段と
を含むことを特徴とする。
【0019】
このような第4の発明によれば、舵角センサからの舵角に基づき装置全体のバネ力低減に相当する補償電流値が付加される。このようにして補正された操舵補助力が電動モータにより与えられるため、第3の発明と同様に操作手段の振動周期を長くすることができ、操作手段を切り込む際の操舵感を犠牲にすることなく、運転者が操作手段の挙動に対して不安感または違和感を覚えることがない状態を保つことができる。
【0020】
【発明の実施の形態】
以下、添付図面を参照して本発明の各実施形態について説明する。
<1.第1の実施形態>
<1.1 全体構成>
図1は、本発明の第1の実施形態に係る電動パワーステアリング装置の構成を、それに関連する車両構成と共に示した概略図である。この電動パワーステアリング装置は、操舵のための操作手段としてのハンドル(ステアリングホイール)100に一端が固着されるステアリングシャフト102と、そのステアリングシャフト102の他端に連結されたラックピニオン機構104と、ハンドル100の操作によってステアリングシャフト102に加えられる操舵トルクを検出するトルクセンサ3と、この電動パワーステアリング装置が搭載される車両の車速を検出する車速センサ4と、ハンドル操作(操舵操作)による運転者の負荷を軽減するための操舵補助力を発生させる電動モータ6と、そのモータ6の発生する操舵補助力をステアリングシャフト102に伝達する減速ギヤ7と、車載バッテリ8からイグニションスイッチ9を介して電源の供給を受け、トルクセンサ3、および車速センサ4からのセンサ信号に基づきモータ6の駆動を制御する電子制御ユニット(ECU)5とを備えている。
【0021】
ここで、ステアリングシャフト102において、ハンドル100側の部分と、減速ギヤ7を介して操舵補助トルクの加えられる部分との間にはトーションバーが介装されている。トルクセンサ3は、そのトーションバーのねじれを検出することにより操舵トルクを検出する。このようにして検出された操舵トルクの検出値Tは、操舵トルク検出信号としてトルクセンサ3から出力され、ECU5に入力される。また、車速センサ4は、車両の走行速度である車速の検出値Vを示す信号を車速信号として出力する。この車速信号もECU5に入力される。
【0022】
このような電動パワーステアリング装置を搭載した車両において運転者がハンドル100を操作すると、その操作による操舵トルクがトルクセンサ3によって検出され、その操舵トルクの検出値Tと車速センサ4によって検出された車速の検出値Vとに基づいてECU5によりモータ6が駆動される。これによりモータ6は操舵補助力を発生し、この操舵補助力が減速ギヤ7を介してステアリングシャフト102に加えられることにより、操舵操作による運転者の負荷が軽減される。すなわち、ハンドル操作によって加えられる操舵トルクと、モータ6の発生する操舵補助力によるトルクとの和が出力トルクとして、ステアリングシャフト102を介してラックピニオン機構104に与えられる。これによりピニオン軸が回転すると、その回転がラックピニオン機構104によってラック軸の往復運動に変換される。ラック軸の両端はタイロッドおよびナックルアームから成る連結部材106を介して車輪108に連結されており、ラック軸の往復運動に応じて車輪108の向きが変わる。
【0023】
<1.2 制御装置の構成および動作>
図2は、上記電動パワーステアリング装置における制御装置であるECU5の機能的構成を示すブロック図である。このECU5は、モータ制御部として機能するマイクロコンピュータ(以下「マイコン」と略記する)10と、そのマイコン10から出力される指令値Dに応じたデューティ比のパルス幅変調信号(PWM信号)を生成するPWM信号生成回路18と、そのPWM信号のデューティ比に応じた電圧をモータ6に印加するモータ駆動回路20と、モータ6に流れる電流を検出する電流検出器19とから構成される。
【0024】
マイコン10は、その内部のメモリに格納された所定のプログラムを実行することにより、目標電流設定部12と減算器14とフィードバック制御演算部(以下「FB制御演算部」と略記する)16とからなるモータ制御部として機能する。このモータ制御部において、目標電流設定部12は、トルクセンサ3から出力される操舵トルクの検出値T(以下、単に「操舵トルクT」という)と、車速センサ4から出力される車速の検出値V(以下、単に「車速V」という)とに基づき、モータ6に流すべき電流の目標値Itを決定する。この目標電流設定部12の詳細な構成および動作については後述する。減算器14は、この目標電流設定部12から出力される電流目標値Itと電流検出器19から出力されるモータ電流の検出値Isとの偏差It−Isを算出する。FB制御演算部16は、この偏差It−Isに基づく比例積分制御演算によって、PWM信号生成回路18に与えるべきフィードバック制御のための上記指令値Dを生成する。
【0025】
PWM信号生成回路18は、この指令値Dに応じたデューティ比のパルス信号、すなわち指令値Dに応じてパルス幅の変化するPWM信号を生成する。モータ駆動回路20は、典型的にはバッテリ8の電源ラインと接地ラインとの間に接続される4個の電力用の電界効果型トランジスタからなるブリッジ回路であって、PWM信号のパルス幅(デューティ比)に応じた電圧をモータ6に印加する。モータ6は、その電圧印加によって流れる電流に応じた大きさおよび方向のトルクを発生する。このように、電流目標値Itを受け取る減算器14、FB制御演算部16、PWM信号生成回路18、モータ駆動回路20、およびモータ電流の検出値Isを減算器14へ出力する電流検出器19は、モータ6に対するフィードバック制御を行う制御手段を構成する。なお、上記電動モータ6はブラシ付きの一般的な直流モータであるが、本発明における駆動手段としての電動モータは、上記モータに限定されるものではなく、例えばブラシレスモータであってもよい。
【0026】
<1.3 目標電流設定部の詳細な構成および動作>
図3は、上記第1の実施形態における目標電流設定部12の構成を示すブロック図である。この目標電流設定部12は、操舵トルクTを受け取り電流目標値Itを算出する基礎となる値であって操舵補助力を与えるために電動モータに流すべき電流の目標値である基本アシスト電流値It’を出力するアシスト電流設定部121と、当該基本アシスト電流値It’に基づきハンドル100の回転角度である舵角の推定値θe(以下「推定舵角θe」という)を出力する舵角推定部122と、この推定舵角θeを受け取りハンドルの戻り時の操舵性を向上させるための戻し制御電流値Irを出力する戻し制御部123と、上記基本アシスト電流値It’に戻し制御電流値Irを加算することにより得られる上記電流目標値Itを出力する加算器124とを含む。なお、本発明における舵角は、ハンドルの回転角度または直進方向に対するタイヤの方向角である転舵角のいずれであってもよいが、説明の便宜のため、以下では舵角はハンドルの回転角度を示すものとして説明する。また、上記操舵トルクTは、所定のパラメータを有する位相進み等のフィルタからなる図示されない位相補償器を通すことにより位相補償が行われてもよい。以下、目標電流設定部12の各構成要素の動作について詳細に説明する。
【0027】
なお、以下では、マイコン10が所定のプログラムを実行することにより、目標電流設定部12における各種構成要素がソフトウェア的に実現されるように構成されるが、これらの構成要素の一部または全部は、専用の電子回路等によりハードウェア的に実現されてもよい。
【0028】
アシスト電流設定部121は、トルクセンサ3からの操舵トルクTと車速Vとに基づき基本アシスト電流値It’を算出する。具体的には、適切な操舵補助力を発生させるためにモータ6に供給すべき電流目標値を算出するための基礎となる基本アシスト電流値It’と操舵トルクTとの関係を車速Vをパラメータとして示すアシストテーブルがアシスト電流設定部121に予め保持されており、アシスト電流設定部121は、このアシストテーブルを参照して基本アシスト電流値It’を設定する。このアシストテーブルは、車速Vが小さいほど、また操舵トルクTが大きいほど基本アシスト電流値It’を大きくするように設定される。そうすれば、ハンドルが重いときほど操舵補助力が大きくなり、操舵操作が容易になる。
【0029】
舵角推定部122には、上記アシストテーブルのように、基本アシスト電流値It’と推定舵角θeとの関係を車速Vをパラメータとして示すテーブル(以下「舵角推定テーブル」という)が内部に予め保持されており、舵角推定部122は、この舵角推定テーブルを参照して推定舵角θeを算出する。図4は、この舵角推定テーブルを例示する図である。図では、実線で示される車速Vが10km/hであるとき、および一点鎖線で示される車速Vが30km/hであるときの、推定舵角θeの絶対値と基本アシスト電流値It’との関係が示されている。なお、図では上記2種類の車速Vに関する関係のみが例示されているが、実際にはさらに多くの種類の車速に関する関係が含まれる。もっとも、舵角推定テーブルは、基本アシスト電流値It’と推定舵角θeとの関係を示していれば足りるため、車速Vをパラメータとしない構成も考えられる。図示される舵角推定テーブルは、車速Vが大きいほど、また基本アシスト電流値It’が大きいほど、推定舵角θeが大きくなるように設定されている。舵角推定テーブルは、特に舵角が比較的小さな値であるときに、舵角と車速Vおよび基本アシスト電流値It’との間に強い相関関係が見られることから、典型的には実測値に基づき予め決定される。なお、上記舵角推定テーブルに代えて、上記相関関係を示す所定の関数式等に基づき推定舵角θeが算出されてもよい。
【0030】
戻し制御部123は、上記舵角推定部122から与えられる推定舵角θeに基づき、ハンドルを戻すように作用する戻し制御電流値Irを出力する。この戻し制御部123には、具体的には、上記戻し制御電流値Irと推定舵角θeとの関係を示すテーブルまたは戻し制御電流値Irを算出するために推定舵角θeに乗算されるべき所定のゲインKrが予め保持されている。戻し制御部123は、このテーブルまたはゲインKrに基づき戻し制御電流値Irを設定する。なお、このテーブルは、アシストテーブルや舵角推定テーブルと同様に、車速Vをパラメータとして上記関係を示すテーブルであってもよい。以上のように設定される戻し制御電流値Irは、加算器124により基本アシスト電流値It’に加算され、当該加算値(加算結果)は電流目標値Itとして出力される。以下、戻し制御部123により行われる制御動作につき詳述する。
【0031】
<1.4 戻し制御部の制御動作>
上述のように、残留舵角を小さくするために戻し制御部123により推定舵角θeに基づき制御が行われるのは以下の理由による。本電動パワーステアリング装置のハンドル100から車輪108までの機構の運動方程式は、ハンドル軸に換算した場合、一般的には次式(1)のように表される。
【数1】
ここで、Tはトルクを示し、θは舵角を示し、Jはイナーシャ(慣性係数)を示し、cは粘性係数(ダンピング係数)を示し、kはバネ定数(バネ力)を示す。また、上式(1)に示す系の共振周波数fは、次式(2)のように示される。
【数2】
この共振周波数fが高いほどハンドルの回転周波数が高くなるため、上式(2)の分子であるkを大きくするように電動モータ6の制御を行うことにより、ハンドルの戻りを速くすることができる。ここで、現実のバネ力kは、本電動パワーステアリング装置のハンドル100から車輪108までの機構の剛性、タイヤ自体の剛性、またはタイヤの転舵角に応じて生じる路面反力などに基づくほぼ固定された値であるため、これらの特性を自在に変更することは極めて困難である。しかし、ハンドルを中立位置に戻すように上記バネ力付加に相当する戻し制御電流が設定されるときには、現実のバネ力は変化しなくてもバネ力が見かけ上は大きくなったものとして取り扱うことができるため、ハンドルの戻りが速くなる。したがって、kを見かけ上大きくするように電動モータ6の制御を行うことにより、残留舵角を小さくすることができる。そこで、戻し制御部123は、推定舵角θeに基づきバネ力付加に相当する戻し制御電流値Irを上記テーブルまたはゲインKrに基づき出力する。
【0034】
図5は戻し制御部により残留舵角が小さくなることを示す図である。図中の点線は、戻し制御部123による上記制御が行われない場合の舵角の時間変化を示し、実線は、戻し制御部123による制御が行われる場合の舵角の時間変化を示す。図示されるように、戻し制御部123によってハンドルが中立位置に戻るため、ハンドルが中立位置に戻らないで止まった状態での舵角(残留舵角)を小さく(典型的にはゼロに)することができる。
【0035】
<1.5 効果>
以上のように、上記第1の実施形態によれば、舵角推定部122により推定舵角θeが算出される。このことにより、車両に舵角センサ(および操舵角速度センサ)を備えることなく、舵角に基づく戻し制御を含む各種補償を行うことができる。また、上記第1の実施形態によれば、戻し制御部123によりバネ力付加に相当する戻し制御電流値Irが付加される。このようにして補正された操舵補助力が電動モータにより与えられるため、典型的にはセルフアライニングトルクの小さい車両における残留舵角を小さくすることができる。よって、ハンドルを精度よく戻す操作が可能となる等、ハンドル操作の操作性を良好に保つことができる。
【0036】
<2.第2の実施形態>
本発明の第2の実施形態に係る電動パワーステアリング装置は、上記第1の実施形態の場合とは異なり、セルフアライニングトルクの大きい車両に搭載される。この電動パワーステアリング装置の構成は、図1および図2に示す上記第1の実施形態とほぼ同様であるため、同一の構成要素については同一の参照符号を付して説明を省略する。図6は、本実施形態における目標電流設定部の構成を示すブロック図である。この目標電流設定部12は、第1の実施形態における戻し制御部123に代えて、ハンドル振動抑制部223が備えられる点が異なる。以下、このハンドル振動抑制部223について説明する。
【0037】
ハンドル振動抑制部223は、前述したハンドル振動の周期が短くなることを防止するための振動抑制電流値Icを出力する。このハンドル振動抑制部223には、振動抑制電流値Icと推定舵角θeとの関係を示すテーブルまたは振動抑制電流値Icを算出するために推定舵角θeに乗算されるべき所定のゲインKcが予め保持されている。ハンドル振動抑制部223は、このテーブルまたはゲインKcに基づき振動抑制電流値Icを設定する。
【0038】
ここで、ハンドル振動の周波数は、上式(2)に示す共振周波数fが低いほどが低くなる。すなわち共振周波数fが低いほどハンドル振動の周期が長くなる。よって、上式(2)の分子であるkを小さくするように電動モータ6の制御を行うことにより、ハンドル振動の周期を長くすることができる。もっとも、上述のように、現実のバネ力kを自在に変更することは極めて困難であるが、バネ力低減に相当する振動抑制電流が設定されるときには、現実のバネ力は変化しなくてもバネ力が見かけ上は小さくなったものとして取り扱うことができるため、ハンドル振動の周期が長くなる。したがって、kを見かけ上小さくするように電動モータ6の制御を行うことにより、ハンドル振動の周期が短くなることを防止することができる。そこで、ハンドル振動抑制部223は、推定舵角θeに基づきバネ力を低減させることに相当する振動抑制電流値Icを上記テーブルまたはゲインKcに基づき出力する。
【0039】
図7は、ハンドル振動抑制部223により短い周期のハンドル振動が防止されることを示す図である。図中の点線は、ハンドル振動抑制部223による上記制御が行われない場合の舵角の時間変化を示し、実線は、ハンドル振動抑制部223による制御が行われる場合の舵角の時間変化を示す。図示されるように、ハンドル振動抑制部223によってバネ力が低減される(ように取り扱うことができる)ことにより共振周波数は低くなり、かつ同一時刻における振幅(すなわちハンドルの中立位置からの舵角の大きさ)も小さくなるため、ハンドル振動の周期が長くなり、かつその振幅も小さくなる。
【0040】
以上のように、上記第2の実施形態によれば、第1の実施形態と同様に舵角センサ(および操舵角速度センサ)を備えることなく、舵角に基づく制御を行うことができる。また、上記第2の実施形態によれば、ハンドル振動抑制部223により共振周波数が低くなるように制御される。このようにして補正された操舵補助力が電動モータにより与えられるため、典型的にはセルフアライニングトルクの大きい車両においてもハンドル振動の周期を長くすることができ、かつ振幅も小さくすることができる。よって、ハンドルを切り込む際の操舵感を犠牲にすることなく、運転者がハンドルの挙動に対して不安感または違和感を覚えることがない状態を保つことができる。
【0041】
<3.第1および第2の実施形態の変形例>
上記第1および第2の実施形態における舵角推定部122は、舵角に代わる推定舵角θeを算出するため、舵角センサを省略することができるが、本発明では、第1の実施形態における戻し制御部123または第2の実施形態におけるハンドル振動抑制部223のほか、(推定)舵角に基づき操舵操作の操作性を高めるための各種補償手段または制御手段に広く適用することができる。
【0042】
上記第1および第2の実施形態における舵角推定部122は、アシスト電流設定部121からの基本アシスト電流値It’を受け取るが、これに代えてトルクセンサ3からの操舵トルク値Tを受け取り、この操舵トルク値Tと車速Vとに基づき推定舵角θeを算出してもよい。すなわち、舵角推定部122には、操舵トルク値Tと推定舵角θeとの関係を車速Vをパラメータとして示す舵角推定テーブルが内部に予め保持されており、舵角推定部122は、この舵角推定テーブルを参照して推定舵角θeを算出する。この舵角推定テーブルも前述と同様に、特に舵角が比較的小さな値であるときに、舵角と車速Vおよび操舵トルク値Tとの間に強い相関関係が見られることから、典型的には実測値に基づき予め決定される。なお、舵角推定部122は、基本アシスト電流値It’および操舵トルク値Tを受け取り、これらの双方に基づき推定舵角θeを算出してもよい。また、上記舵角推定テーブルに代えて、上記相関関係を示す所定の関数式等に基づき推定舵角θeが算出されてもよい。
【0043】
上記第2の実施形態におけるハンドル振動抑制部223は、舵角推定部122からの舵角推定値θeを受け取るが、舵角推定部122が省略されて、これに代えて設けられる舵角センサからの実際の舵角がハンドル振動抑制部223に与えられる構成でもよい。この構成では、舵角センサが必要となるが、実際の舵角に基づいてより正確なハンドル振動抑制部223による制御が行われるため、ハンドル振動の周期を長くすることができ、かつ振幅も小さくすることができる。
【図面の簡単な説明】
【図1】本発明の第1の実施形態に係る電動パワーステアリング装置の構成をそれに関連する車両構成と共に示す概略図である。
【図2】上記実施形態に係る電動パワーステアリング装置における制御装置であるECUの機能的構成を示すブロック図である。
【図3】上記実施形態における目標電流設定部の構成を示すブロック図である。
【図4】上記実施形態における舵角推定テーブルを例示する図である。
【図5】上記実施形態における戻し制御部により残留舵角が小さくなることを示す図である。
【図6】本発明の第2の実施形態における目標電流設定部の構成を示すブロック図である。
【図7】第2の実施形態におけるハンドル振動抑制部により短い周期のハンドル振動が防止されることを示す図である。
【図8】従来の電動パワーステアリング装置において生じる残留舵角を示す図である。
【符号の説明】
3 …トルクセンサ
4 …車速センサ
5 …電子制御ユニット(ECU)
6 …モータ
10 …マイクロコンピュータ(モータ制御部)
12 …目標電流設定部(目標値設定手段)
14 …減算器
16 …フィードバック制御演算部(FB制御演算部)
18 …PWM信号生成回路
19 …電流検出器
20 …モータ駆動回路
121 …アシスト電流設定部
122 …舵角推定部
123 …戻し制御部(補償電流値設定手段)
124 …加算器
223 …ハンドル振動抑制部(補償電流値設定手段)
It …電流目標値
It’…基本アシスト電流値
Is …電流検出値
Ir …戻し制御電流値
Ic …振動抑制電流値
V …車速
T …操舵トルク
θe …推定舵角
Claims (4)
- 車両操舵のための操作手段によって加えられる操舵トルクに応じて電動モータを駆動することにより当該車両のステアリング機構に操舵補助力を与える電動パワーステアリング装置であって、
前記操舵トルクを検出するトルクセンサと、
前記電動モータに供給すべき電流の目標値を設定する目標値設定手段と、
前記電流目標値と前記電動モータに流れる電流との電流偏差に基づき、前記電動モータに対してフィードバック制御を行う制御手段と
を備え、
前記目標値設定手段は、
前記操舵トルクに基づき、前記操舵補助力を与えるために前記電動モータに供給すべき電流の目標値である基本アシスト電流値を算出するアシスト電流算出手段と、
前記操舵トルクおよび前記基本アシスト電流値の一方または双方に基づき、前記操作手段の操作による操舵角または前記車両の車輪の転舵角のいずれかを示す舵角の推定値である推定舵角を算出する舵角推定手段と、
前記推定舵角に基づき前記車両操舵の操作性を向上させるための補償電流値を設定する補償電流値設定手段と、
前記基本アシスト電流値を前記補償電流値によって補正することにより前記電流目標値を算出する補正手段と
を含むことを特徴とする、電動パワーステアリング装置。 - 前記補償電流値設定手段は、前記操作手段の所定の中立位置への戻し操作における操作性を向上させる戻し制御のための補償電流値を設定することを特徴とする、請求項1に記載の電動パワーステアリング装置。
- 前記補償電流値設定手段は、前記車両のステアリング機構を含む装置全体のバネ力低減に相当する補償電流値を設定することを特徴とする、請求項1に記載の電動パワーステアリング装置。
- 車両操舵のための操作手段によって加えられる操舵トルクに応じて電動モータを駆動することにより当該車両のステアリング機構に操舵補助力を与える電動パワーステアリング装置であって、
前記操舵トルクを検出するトルクセンサと、
前記操作手段の操作による操舵角または前記車両の車輪の転舵角のいずれかを示す舵角を検出する舵角センサと、
前記電動モータに供給すべき電流の目標値を設定する目標値設定手段と、
前記電流目標値と前記電動モータに流れる電流との電流偏差に基づき、前記電動モータに対してフィードバック制御を行う制御手段と
を備え、
前記目標値設定手段は、
前記車両のステアリング機構を含む装置全体のバネ力低減に相当する補償電流値を設定する補償電流値設定手段と、
前記操舵トルクに基づき前記操舵補助力を与えるために前記電動モータに供給すべき電流の目標値である基本アシスト電流値を算出し、算出された当該基本アシスト電流値を前記補償電流値によって補正することにより前記電流目標値を設定する目標値算出手段と
を含むことを特徴とする、電動パワーステアリング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003046512A JP2004255932A (ja) | 2003-02-24 | 2003-02-24 | 電動パワーステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003046512A JP2004255932A (ja) | 2003-02-24 | 2003-02-24 | 電動パワーステアリング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004255932A true JP2004255932A (ja) | 2004-09-16 |
Family
ID=33113032
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003046512A Pending JP2004255932A (ja) | 2003-02-24 | 2003-02-24 | 電動パワーステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004255932A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101148365B1 (ko) | 2007-04-16 | 2012-05-25 | 주식회사 만도 | 조향각 오류 판별 기능을 제공하는 전동식 조향장치의전자제어장치 및 방법 |
| CN111216788A (zh) * | 2020-02-21 | 2020-06-02 | 株洲易力达机电有限公司 | 一种电动助力转向模糊回正方法 |
-
2003
- 2003-02-24 JP JP2003046512A patent/JP2004255932A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101148365B1 (ko) | 2007-04-16 | 2012-05-25 | 주식회사 만도 | 조향각 오류 판별 기능을 제공하는 전동식 조향장치의전자제어장치 및 방법 |
| CN111216788A (zh) * | 2020-02-21 | 2020-06-02 | 株洲易力达机电有限公司 | 一种电动助力转向模糊回正方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3850735B2 (ja) | 電動パワーステアリング装置 | |
| JP4269677B2 (ja) | 電動パワーステアリング装置 | |
| US8150580B2 (en) | Motor controller and electric power steering system | |
| JP4192442B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| US6838844B2 (en) | Electric power steering apparatus | |
| JP4984110B2 (ja) | 電動パワーステアリング装置 | |
| CN111278715A (zh) | 转向操纵控制装置 | |
| WO2014122907A1 (ja) | 電動パワーステアリング装置 | |
| US11787470B2 (en) | Electric power steering apparatus, control device, control method, and motor module | |
| US20220289274A1 (en) | Electric power steering apparatus, control device used in electric power steering apparatus, and control method | |
| US12280842B2 (en) | Control device, electric power steering device, and control method | |
| JP2005082119A (ja) | 電動パワーステアリング装置 | |
| JP5265436B2 (ja) | 電動パワーステアリング装置およびその制御方法 | |
| US20190193789A1 (en) | Steering control device | |
| JP6326171B1 (ja) | 操舵制御装置、電動パワーステアリング装置 | |
| JP2004291815A (ja) | 電動パワーステアリング装置 | |
| JP2004255932A (ja) | 電動パワーステアリング装置 | |
| JP2004276821A (ja) | 電動パワーステアリング装置 | |
| JP2004203113A (ja) | 電動パワーステアリング装置 | |
| US20250002075A1 (en) | Control device, electric power steering device, and drive device | |
| JP2009248838A (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2004114711A (ja) | 電動パワーステアリング装置 | |
| JP2005059777A (ja) | 電動パワーステアリング装置 | |
| JP2004255934A (ja) | 電動パワーステアリング装置 | |
| JP4413098B2 (ja) | 電動パワーステアリング装置 |