JP2004257882A - 偏角測定装置及び偏角測定方法 - Google Patents
偏角測定装置及び偏角測定方法 Download PDFInfo
- Publication number
- JP2004257882A JP2004257882A JP2003049524A JP2003049524A JP2004257882A JP 2004257882 A JP2004257882 A JP 2004257882A JP 2003049524 A JP2003049524 A JP 2003049524A JP 2003049524 A JP2003049524 A JP 2003049524A JP 2004257882 A JP2004257882 A JP 2004257882A
- Authority
- JP
- Japan
- Prior art keywords
- light
- measured
- measurement
- shielding plate
- light source
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




Landscapes
- Mechanical Light Control Or Optical Switches (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Testing Of Optical Devices Or Fibers (AREA)
Abstract
【課題】コンパクトな光学系を用いて測定精度の高い偏角測定装置及び方法を提供することを目的とする。
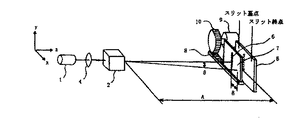
【解決手段】偏角測定装置は、測定光を出射する光源1と、光源1が出射する測定光を集光しビーム化するレンズ4と、測定光を入射し偏角を測定する被測定物2と、ビーム化した測定光の光軸上に配置した受光器5と、受光器5の光源側前面に配置しスリット孔6を有する遮光板7と、該遮光板7を固定したガイド8と、前記遮光板7を受光器5に平行に移動させるための動力となると共に移動量を認識するモータ9と、該モータ9に固定して前記ガイド8に設けた板状の歯に噛合い、遮光板7を移動させる歯車10とにより構成する。
【選択図】 図1
【解決手段】偏角測定装置は、測定光を出射する光源1と、光源1が出射する測定光を集光しビーム化するレンズ4と、測定光を入射し偏角を測定する被測定物2と、ビーム化した測定光の光軸上に配置した受光器5と、受光器5の光源側前面に配置しスリット孔6を有する遮光板7と、該遮光板7を固定したガイド8と、前記遮光板7を受光器5に平行に移動させるための動力となると共に移動量を認識するモータ9と、該モータ9に固定して前記ガイド8に設けた板状の歯に噛合い、遮光板7を移動させる歯車10とにより構成する。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は偏角の測定装置及び方法に関し、特に光学部品において規定される光路偏角を、コンパクトで精度良く測定可能とする偏角測定装置及び方法に関する。
【0002】
【従来の技術】
光学部品においては、特開2001−281602号公報に開示されている通り、入射する光線を所定の位置に精度良く出射する性能を有する必要があり、入射光線に対して所定の角度で曲げられた出射光線との関係を光路偏角として規定している。
図5は、従来の偏角測定装置の一例である。図5は、光路偏角を簡易的に測定する方法を示すものであり、測定光を出射する光源1と、被測定物2と、被測定物2が出射する光を投射するスクリーン3とにより構成する。
【0003】
図5の動作を説明すると、光源1よりビーム光を被測定物2の入射面に照射し、被測定物2が出射するビーム光をスクリーン3に投射する。スクリーン3は、例えば板状のものに所定の間隔で目盛りが振られたものであり、被測定物2の光軸に対して投射されたビーム光が曲げられた距離を測定する。この時、被測定物2の偏角θは、被測定物2とスクリーン3との最短距離をAとし、被測定物2によりビーム光が曲げられた距離をBとすると、
偏角θ=tan−1(B/A)
として求めることが出来る。
【0004】
【発明が解決しようとする課題】
しかしながら、従来の偏角測定方法は、測定精度を高めるために、被測定物2から投射されるビーム光が曲げられた距離Bを相対的に大きくする必要があり、従って、被測定物2とスクリーン3間の距離Aも大きくなる。そのため、測定に要する光学系が大きなものになってしまうと共に、スクリーン3に投射されるビーム径が大きくなり、前述の距離Bの微小な変動を読み取ることが困難であることから、測定精度の高い偏角測定が難しいという問題が生じていた。因みに、従来の偏角測定方法により得られる分解能は、被測定物2とスクリーン3との距離A=8mの時に、距離Bの判別可能距離=2mmとした際に、偏角θが、0.86′程度である。
本発明は、上述したような問題を解決させるためになされたものであって、コンパクトな光学系を用いて測定精度の高い偏角測定装置及び方法を提供することを目的とする。
【0005】
【課題を解決するための手段】
上記目的を達成するために本発明に係わる偏角測定装置及び方法は、以下の構成をとる。
請求項1記載の偏角測定装置は、測定光を出射する光源と、該光源が出射した測定光を集光しビーム化するレンズと、ビーム化した測定光の光軸上に配置した受光器と、前記受光器の光源側前面にスリット孔を有する遮光板と、該遮光板を移動するための駆動手段と、前記遮光板の移動量を検出する移動量検出手段とを備えており、前記レンズから出射する測定光の光軸上に被測定物を配置して該被測定物の光路偏角を測定するよう構成する。
【0006】
請求項2記載の偏角測定装置は、前記遮光板をその主面が前記レンズから出射する測定光の光軸に対してほぼ直交するよう配置すると共に、前記主面に平行な方向に移動可能とするよう構成する。
【0007】
請求項3記載の偏角測定装置は、前記スリット孔がその長手方向が前記遮光板の移動方向と直交するように形成されるよう構成する。
【0008】
請求項4記載の偏角測定方法は、測定光を出射する光源と、該光源が出射した測定光を集光しビーム化するレンズと、ビーム化した測定光の光軸上に配置した受光器と、前記受光器の光源側前面にスリット孔を有する遮光板と、該遮光板を移動するための駆動手段と、前記遮光板の移動量を検出する移動量検出手段とを備えた偏角測定装置を用いて、前記レンズから出射する測定光の光軸上に戴置された被測定物の光路偏角を測定する方法であって、被測定物を前記偏角測定装置に戴置しない状態において、前記遮光板を移動させながらその移動量と前記受光器の出力とを測定し、前記受光器の出力が最大となったときの前記遮光板の位置を第一のピーク値として認識するステップと、被測定物を戴置した状態において、前記遮光板を移動させながらその移動量と前記受光器の出力とを測定し、前記受光器の出力が最大となったときの前記遮光板の位置を第二のピーク値として認識するステップと、被測定物を戴置した位置から前記受光器までの距離をAとし前記第一のピーク位置から第二のピーク位置までの距離をBとして、被測定物の偏角θを次式 θ=tan−1(B/A)に基づいて算出するステップとを含むよう構成する。
【0009】
請求項5記載の偏角測定装置は、測定光を出射する光源と、該光源が出射した測定光の光軸上に配置した角度プリズムと、該角度プリズムから出射した測定光の光軸上に配置した受光器とを備えており、前記光源から出射する測定光の光軸上に基準となる光学部品及び被測定物を順次配置して被測定物の偏角誤差を測定するよう構成する。
【0010】
請求項6記載の偏角測定方法は、測定光を出射する光源と、該光源が出射した測定光の光軸上に配置した角度プリズムと、該角度プリズムから出射した測定光の光軸上に配置した受光器とを備えた偏角測定装置を用いて、前記光源から出射する測定光の光軸上に戴置された被測定物の偏角誤差を測定する方法であって、基準となる光学部品を前記偏角測定装置に戴置して、前記光源が出射する測定光を受光器に結像させた点を基準点とするステップと、被測定物を前記偏角測定装置に戴置して、前記光源が出射する測定光を受光器に結像させた結像点と前記基準点との間の距離を計測するステップと、計測した前記距離を基に基準となる光学部品が有する偏角に対する被測定物が有する偏角誤差を算出するステップとを含むよう構成する。
【0011】
【発明の実施の形態】
以下、図示した実施例に基づいて本発明を詳細に説明する。
図1は、本発明に係る偏角測定装置及び方法の第一の実施形態を示す機能図である。本実施例は、測定光を出射する光源1と、光源1が出射する測定光を集光しビーム化するレンズ4と、測定光を入射し偏角を測定する被測定物2と、ビーム化した測定光の光軸上に配置した受光器5と、受光器5の光源側前面に配置しスリット孔6を有する遮光板7と、該遮光板7を固定したガイド8と、前記遮光板7を受光器5に平行に移動させるための動力となると共に移動量を認識するモータ9と、該モータ9に固定して前記ガイド8に設けた板状の歯に噛合い、遮光板7を移動させる歯車10とにより構成する。又、遮光板7は、レンズから出射する測定光の光軸に対してほぼ直交するよう配置すると共に、受光器5に平行に移動する。
【0012】
図1の動作を説明すると、光源1から出射される測定光は、レンズ4に入射して集光し、受光器5に結像するように光学系が調整されている。そこで、先ず、測定にあたって偏角測定のための測定系の基準データを得るため、被測定物を配置しない状態で遮光板7を移動させ、受光器5において検出する測定光の受光量を測定する。受光器5には、図示していないパソコン等が接続されており、遮光板7の移動量と受光量の測定データを入力してグラフ化し、基準データを出力する。
【0013】
本実施例において使用している遮光板7は、例えば薄い金属プレート等の中央に、長さ6mm、幅0.1mm程度のスリット孔6を設けたものであり、この遮光板7を所定の間隔で受光器5に平行に移動させた際に、スリット孔6を通過する測定光の強度を受光器5により検出する。モータ9は、遮光板7を所定の間隔で移動させる際の動力源であり、このモータ9は、印加されるパルスによって回転する機能を有しており、パルスが入力される度に所定の間隔で回転すると共に、遮光板7の移動量を認識する。
【0014】
そこで、モータ9には歯車10が固定されており、モータ9が回転すると、この歯車10と噛合っている板状のガイド8が所定のステップで移動し、従って、ガイド8に固定された遮光板7が、受光器5に平行に移動する。図1に示したスリット基点とスリット終点の範囲をスリット孔6は移動し、基準となる測定光が受光器5に結像する位置と、被測定物2が出射する測定光が受光器5に結像する位置とは、この移動範囲に含まれるものとする。
【0015】
次に、基準データ採取後、被測定物2を偏角測定装置の所定の位置に配置し、基準データ採取時と同様に、スリット基点からスリット終点まで、モータ9へ入力するパルス数により制御される所定の間隔で遮光板7を移動させ、その時に受光器5で検出される受光量を測定する。受光器5には、図示していないパソコン等が接続されており、遮光板7の移動量と受光量の測定データを入力してグラフ化し、受光特性を出力する。
【0016】
図2は、本発明に係わる偏角測定装置及び方法の第一の実施形態において、基準データと被測定データをグラフ化した図である。図2は、上述したように、被測定物を配置しない時(基準データ)と被測定物を配置した時(被測定データ)に、スリット孔をスリッド基点からスリット終点まで所定の間隔で移動させた時の、受光器が検出した受光量をグラフ化したものである。図2(a)は、スリット基点からスリット終点までに検出した受光量を示し、図2(b)は、基準データと被測定データのピーク点を拡大したものである。図2(b)の拡大図において、Lは、スリット孔を移動させる際のステップ距離を示す。そこで、基準データと被測定データのピーク値間の距離Bを求めると、距離Bは、被測定物を光学測定系に配置したことにより測定光が曲げられた距離を示し、従って、偏角θは、図1に示したように被測定物と受光器間の最短距離をAとすると、
偏角θ=tan−1(B/A)
により求めることが出来る。
【0017】
本実施例における最小分解能は、距離Aを100mm、Lを1μmと設定すると、約0.04′が可能となり高精度な偏角測定が可能となると共に、被測定物と受光器間の距離を短縮することが出来ることから、コンパクトな偏角測定装置を構成可能である。
【0018】
図3は、本発明に係る偏角測定装置及び方法の第二の実施形態を示す機能図である。本実施例は、測定光を出射する光源1と、測定光を入射し偏角を測定する被測定物2と、光源が出射した測定光の光軸上に配置した角度プリズム11と、測定光を結像させる受光器となるCCDカメラ12とにより構成する。
図3の動作を説明すると、光源1が出射する測定光は、被測定物2に入射された後、角度プリズム11に出射する。角度プリズム11は、被測定物2において発生した光路偏角θを任意の倍率αで拡大するためのもので、角度プリズム11に入射した測定光は、偏角がα倍拡大してCCDカメラ12に出射される。
【0019】
次に、CCDカメラに出射した測定光を用いて具体的に偏角の計算方法を説明する。本実施例においては、被測定物の偏角を直接計測する目的のものではなく、基準となる光学部品の偏角と比較して被測定物の偏角がどの程度の微小な誤差を有しているかを精度良く計測するためのものである。そのため、偏角測定にあたって、先ず、偏角が既知である基準となる光学部品を被測定物の代わりに測定系に挿入して、測定光を基準となる光学部品に照射し、角度プリズムを経由してCCDカメラのモニターの中心部に結像させ、この結像点を基準値とする。次に、基準となる光学部品に代え被測定物を測定系に挿入して、測定光を被測定物に照射し、角度プリズムを経由してCCDカメラのモニターに結像させ、この結像点と既知である基準値との距離の差を計測することにより基準となる光学部品と被測定物との偏角の誤差を識別するものである。そこで、両者の偏角の差と、CCDカメラに結像した基準値と測定値と間の距離の関係がどのようになるか具体的な計算例を用いて説明する。
【0020】
図4は、本発明に係わる偏角測定装置及び方法の第二の実施形態において、測定光が出射される様子を示す。
角度プリズムを挿入しない状態で、測定光が被測定物を透過し、CCDカメラに出射した際に測定光が曲げられた距離をS1、被測定物からCCDカメラまでの距離をL1、その時の偏角をθ2−θ1とし、測定系に角度プリズムを挿入した状態で、測定光が被測定物を透過した後、角度プリズムを介してCCDカメラに出射した際に測定光が曲げられた距離をS2、角度プリズムからCCDカメラまでの距離をL4、及び、θ3、θ4、θ5を図4に示した角度とすると以下の関係式であらわすことが出来る。
S2=L4×tan(θ5−θ4) ・・・・・(1)
又、大気の屈折率をn0、被測定物の屈折率をn1、角度プリズムの屈折率をn2とすると、
n0×sinθ5=n2×sin(θ4+θ3) ・・・・・(2)
n2×sinθ3=n0×sin(θ2−θ1) ・・・・・(3)
n0×sinθ2=n1×sinθ1 ・・・・・(4)
の関係式が成り立つので、式(1)、(2)、(3)、(4)よりθ5は、
θ5=sin−1((n1/n0)×sin(θ4+sin−1((n0/n2
)×sin(sin−1((n1/n0)×sinθ1)−θ1))))・・・・・(5)
により求められる。
【0021】
そこで、先ず、測定系に基準となる光学部品を挿入した場合について、これを計算例Aとして、L1=1000mm(L2=50mm、L3=10mm、L4=940mm)、n0=1、n1=n2=1.51、θ1=1°、θ4=30°としθ5Aを求めてみると、式(5)より
θ5A≒49.70°
S2Aは、式(1)より
S2A≒336.57mm
が求められる。
【0022】
一方、次に被測定物を測定系に挿入し、これを計算例Bとして、 L1=1000mm(L2=50mm、L3=10mm、L4=940mm)、n0=1、n1=n2=1.51、θ1=1.05°、θ4=30°の場合について、同様にθ5Bを求めてみると、式(5)より
θ5B≒56.56°
S2Bは、式(1)より
S2B≒469.9mm
が求められる。従って、計算例AとBの両者の差を求めると
S2B−S2A=133.33mm
となり、基準となる光学部品の偏角に対して、被測定物の偏角が0.05°(3′)の角度差を有する時に、S2の距離に換算すると133.33mmとなる。従って、上述したような計算例を基に各角度差に対するS2の距離が換算できるので、本測定系において、被測定物を挿入しCCDカメラに測定光を結像させた際に、この結像点と前記基準点との距離を計測することにより、基準となる光学部品に対して被測定物の偏角がどの程度誤差を有しているかの計測が可能となる。
【0023】
次に、本第二の実施形態が、従来の偏角測定方法の如く測定系に角度プリズムを挿入しない場合に比べ、どの程度分解能が改善されたかを説明する。
そこで、角度プリズムを挿入しない場合について、前述したような計算方法と同様に、図4を用いて角度差に対する距離を計算する。
測定光が被測定物を透過し、CCDカメラに出射した際に測定光が曲げられた距離をS1、被測定物からCCDカメラまでの距離をL1、その時の偏角をθ2−θ1とすると以下の関係式であらわすことが出来る。
S1=L1×tan(θ2−θ1) ・・・・・(6)
又、大気の屈折率をn0、被測定物の屈折率をn1とすると、
n0×sinθ2=n1sinθ1 ・・・・・(7)
の関係式が成り立つので、式(6)、(7)よりS1は、
S1=L1×tan(sin−1(n1×sinθ1/n0)) ・・・(8)
により求められる。
【0024】
そこで、先ず、測定系に基準となる光学部品を挿入した場合について、これを計算例Cとして、L1=1000mm、n0=1、n1=1.51、
θ1=1°とし、S1Cを求めてみると、式(8)より
S1C≒26.36mm
が求められる。
【0025】
一方、次に被測定物を測定系に挿入し、これを計算例Dとして、L1=1000mm、n0=1、n1=1.51、θ1=1.05°の場合についてS1Dを求めてみると、式(8)より
S1D≒27.68mm
が求められる。従って、両者の差を求めると
S1D−S1C=1.32mm
となり、基準となる光学部品の偏角に対して、被測定物の偏角が0.05°(3′)の角度差を有する時に、S1の距離に換算すると1.32mmとなる。従って、角度プリズムを挿入した場合の分解能に比べて大きく劣化している。
【0026】
以上の計算結果より、角度θ4の角度プリズムを測定系に挿入することにより、偏角量に対する距離の関係が拡大し、より精度の高い偏角測定が可能となる。又、偏角量に対する距離の関係の拡大量は、角度プリズムのθ4の角度で調整することが可能である。
尚、第二の実施形態においては、結像点の距離の計測にCCDカメラを使用したが、板状のスクリーンを用意し投射される結像点の距離を計測しても良い。
従って本第二の実施形態においても、コンパクトで高精度な偏角測定装置が実現出来る。
【0027】
【発明の効果】
上述したように、請求項1及び4記載の発明は、受光器の前面にスリット孔を有する遮光板を設け、この遮光板を移動させて受光量のピーク値を求め、基準値とピーク値との距離を求めることにより高精度な偏角測定と、且つ、コンパクトな測定系を構成出来、光学部品の偏角を測定する上で著しい効果を発揮することが可能である。
【0028】
請求項5及び6記載の発明は、測定系に角度プリズムを挿入することにより偏角が拡大され、基準となる光学部品が有する偏角に対して、被測定物が有する偏角の微小な誤差を高精度で計測でき、光学部品の偏角を測定する上で著しい効果を発揮することが可能である。
【図面の簡単な説明】
【図1】本発明に係る偏角測定装置及び方法の第一の実施形態を示す機能図である。
【図2】本発明に係わる偏角測定装置及び方法の第一の実施形態において、基準データと被測定データをグラフ化した図である。
【図3】本発明に係る偏角測定装置及び方法の第二の実施形態を示す機能図である。
【図4】本発明に係わる偏角測定装置及び方法の第二の実施形態において、測定光が出射される様子を示す。
【図5】従来の偏角測定装置の一例である。
【符号の説明】
1・・光源、 2・・被測定物、
3・・スクリーン、 4・・レンズ、
5・・受光器、 6・・スリット孔、
7・・遮光板、 8・・ガイド、
9・・モータ、 10・・歯車、
11・・角度プリズム、 12・・CCDカメラ
【発明の属する技術分野】
本発明は偏角の測定装置及び方法に関し、特に光学部品において規定される光路偏角を、コンパクトで精度良く測定可能とする偏角測定装置及び方法に関する。
【0002】
【従来の技術】
光学部品においては、特開2001−281602号公報に開示されている通り、入射する光線を所定の位置に精度良く出射する性能を有する必要があり、入射光線に対して所定の角度で曲げられた出射光線との関係を光路偏角として規定している。
図5は、従来の偏角測定装置の一例である。図5は、光路偏角を簡易的に測定する方法を示すものであり、測定光を出射する光源1と、被測定物2と、被測定物2が出射する光を投射するスクリーン3とにより構成する。
【0003】
図5の動作を説明すると、光源1よりビーム光を被測定物2の入射面に照射し、被測定物2が出射するビーム光をスクリーン3に投射する。スクリーン3は、例えば板状のものに所定の間隔で目盛りが振られたものであり、被測定物2の光軸に対して投射されたビーム光が曲げられた距離を測定する。この時、被測定物2の偏角θは、被測定物2とスクリーン3との最短距離をAとし、被測定物2によりビーム光が曲げられた距離をBとすると、
偏角θ=tan−1(B/A)
として求めることが出来る。
【0004】
【発明が解決しようとする課題】
しかしながら、従来の偏角測定方法は、測定精度を高めるために、被測定物2から投射されるビーム光が曲げられた距離Bを相対的に大きくする必要があり、従って、被測定物2とスクリーン3間の距離Aも大きくなる。そのため、測定に要する光学系が大きなものになってしまうと共に、スクリーン3に投射されるビーム径が大きくなり、前述の距離Bの微小な変動を読み取ることが困難であることから、測定精度の高い偏角測定が難しいという問題が生じていた。因みに、従来の偏角測定方法により得られる分解能は、被測定物2とスクリーン3との距離A=8mの時に、距離Bの判別可能距離=2mmとした際に、偏角θが、0.86′程度である。
本発明は、上述したような問題を解決させるためになされたものであって、コンパクトな光学系を用いて測定精度の高い偏角測定装置及び方法を提供することを目的とする。
【0005】
【課題を解決するための手段】
上記目的を達成するために本発明に係わる偏角測定装置及び方法は、以下の構成をとる。
請求項1記載の偏角測定装置は、測定光を出射する光源と、該光源が出射した測定光を集光しビーム化するレンズと、ビーム化した測定光の光軸上に配置した受光器と、前記受光器の光源側前面にスリット孔を有する遮光板と、該遮光板を移動するための駆動手段と、前記遮光板の移動量を検出する移動量検出手段とを備えており、前記レンズから出射する測定光の光軸上に被測定物を配置して該被測定物の光路偏角を測定するよう構成する。
【0006】
請求項2記載の偏角測定装置は、前記遮光板をその主面が前記レンズから出射する測定光の光軸に対してほぼ直交するよう配置すると共に、前記主面に平行な方向に移動可能とするよう構成する。
【0007】
請求項3記載の偏角測定装置は、前記スリット孔がその長手方向が前記遮光板の移動方向と直交するように形成されるよう構成する。
【0008】
請求項4記載の偏角測定方法は、測定光を出射する光源と、該光源が出射した測定光を集光しビーム化するレンズと、ビーム化した測定光の光軸上に配置した受光器と、前記受光器の光源側前面にスリット孔を有する遮光板と、該遮光板を移動するための駆動手段と、前記遮光板の移動量を検出する移動量検出手段とを備えた偏角測定装置を用いて、前記レンズから出射する測定光の光軸上に戴置された被測定物の光路偏角を測定する方法であって、被測定物を前記偏角測定装置に戴置しない状態において、前記遮光板を移動させながらその移動量と前記受光器の出力とを測定し、前記受光器の出力が最大となったときの前記遮光板の位置を第一のピーク値として認識するステップと、被測定物を戴置した状態において、前記遮光板を移動させながらその移動量と前記受光器の出力とを測定し、前記受光器の出力が最大となったときの前記遮光板の位置を第二のピーク値として認識するステップと、被測定物を戴置した位置から前記受光器までの距離をAとし前記第一のピーク位置から第二のピーク位置までの距離をBとして、被測定物の偏角θを次式 θ=tan−1(B/A)に基づいて算出するステップとを含むよう構成する。
【0009】
請求項5記載の偏角測定装置は、測定光を出射する光源と、該光源が出射した測定光の光軸上に配置した角度プリズムと、該角度プリズムから出射した測定光の光軸上に配置した受光器とを備えており、前記光源から出射する測定光の光軸上に基準となる光学部品及び被測定物を順次配置して被測定物の偏角誤差を測定するよう構成する。
【0010】
請求項6記載の偏角測定方法は、測定光を出射する光源と、該光源が出射した測定光の光軸上に配置した角度プリズムと、該角度プリズムから出射した測定光の光軸上に配置した受光器とを備えた偏角測定装置を用いて、前記光源から出射する測定光の光軸上に戴置された被測定物の偏角誤差を測定する方法であって、基準となる光学部品を前記偏角測定装置に戴置して、前記光源が出射する測定光を受光器に結像させた点を基準点とするステップと、被測定物を前記偏角測定装置に戴置して、前記光源が出射する測定光を受光器に結像させた結像点と前記基準点との間の距離を計測するステップと、計測した前記距離を基に基準となる光学部品が有する偏角に対する被測定物が有する偏角誤差を算出するステップとを含むよう構成する。
【0011】
【発明の実施の形態】
以下、図示した実施例に基づいて本発明を詳細に説明する。
図1は、本発明に係る偏角測定装置及び方法の第一の実施形態を示す機能図である。本実施例は、測定光を出射する光源1と、光源1が出射する測定光を集光しビーム化するレンズ4と、測定光を入射し偏角を測定する被測定物2と、ビーム化した測定光の光軸上に配置した受光器5と、受光器5の光源側前面に配置しスリット孔6を有する遮光板7と、該遮光板7を固定したガイド8と、前記遮光板7を受光器5に平行に移動させるための動力となると共に移動量を認識するモータ9と、該モータ9に固定して前記ガイド8に設けた板状の歯に噛合い、遮光板7を移動させる歯車10とにより構成する。又、遮光板7は、レンズから出射する測定光の光軸に対してほぼ直交するよう配置すると共に、受光器5に平行に移動する。
【0012】
図1の動作を説明すると、光源1から出射される測定光は、レンズ4に入射して集光し、受光器5に結像するように光学系が調整されている。そこで、先ず、測定にあたって偏角測定のための測定系の基準データを得るため、被測定物を配置しない状態で遮光板7を移動させ、受光器5において検出する測定光の受光量を測定する。受光器5には、図示していないパソコン等が接続されており、遮光板7の移動量と受光量の測定データを入力してグラフ化し、基準データを出力する。
【0013】
本実施例において使用している遮光板7は、例えば薄い金属プレート等の中央に、長さ6mm、幅0.1mm程度のスリット孔6を設けたものであり、この遮光板7を所定の間隔で受光器5に平行に移動させた際に、スリット孔6を通過する測定光の強度を受光器5により検出する。モータ9は、遮光板7を所定の間隔で移動させる際の動力源であり、このモータ9は、印加されるパルスによって回転する機能を有しており、パルスが入力される度に所定の間隔で回転すると共に、遮光板7の移動量を認識する。
【0014】
そこで、モータ9には歯車10が固定されており、モータ9が回転すると、この歯車10と噛合っている板状のガイド8が所定のステップで移動し、従って、ガイド8に固定された遮光板7が、受光器5に平行に移動する。図1に示したスリット基点とスリット終点の範囲をスリット孔6は移動し、基準となる測定光が受光器5に結像する位置と、被測定物2が出射する測定光が受光器5に結像する位置とは、この移動範囲に含まれるものとする。
【0015】
次に、基準データ採取後、被測定物2を偏角測定装置の所定の位置に配置し、基準データ採取時と同様に、スリット基点からスリット終点まで、モータ9へ入力するパルス数により制御される所定の間隔で遮光板7を移動させ、その時に受光器5で検出される受光量を測定する。受光器5には、図示していないパソコン等が接続されており、遮光板7の移動量と受光量の測定データを入力してグラフ化し、受光特性を出力する。
【0016】
図2は、本発明に係わる偏角測定装置及び方法の第一の実施形態において、基準データと被測定データをグラフ化した図である。図2は、上述したように、被測定物を配置しない時(基準データ)と被測定物を配置した時(被測定データ)に、スリット孔をスリッド基点からスリット終点まで所定の間隔で移動させた時の、受光器が検出した受光量をグラフ化したものである。図2(a)は、スリット基点からスリット終点までに検出した受光量を示し、図2(b)は、基準データと被測定データのピーク点を拡大したものである。図2(b)の拡大図において、Lは、スリット孔を移動させる際のステップ距離を示す。そこで、基準データと被測定データのピーク値間の距離Bを求めると、距離Bは、被測定物を光学測定系に配置したことにより測定光が曲げられた距離を示し、従って、偏角θは、図1に示したように被測定物と受光器間の最短距離をAとすると、
偏角θ=tan−1(B/A)
により求めることが出来る。
【0017】
本実施例における最小分解能は、距離Aを100mm、Lを1μmと設定すると、約0.04′が可能となり高精度な偏角測定が可能となると共に、被測定物と受光器間の距離を短縮することが出来ることから、コンパクトな偏角測定装置を構成可能である。
【0018】
図3は、本発明に係る偏角測定装置及び方法の第二の実施形態を示す機能図である。本実施例は、測定光を出射する光源1と、測定光を入射し偏角を測定する被測定物2と、光源が出射した測定光の光軸上に配置した角度プリズム11と、測定光を結像させる受光器となるCCDカメラ12とにより構成する。
図3の動作を説明すると、光源1が出射する測定光は、被測定物2に入射された後、角度プリズム11に出射する。角度プリズム11は、被測定物2において発生した光路偏角θを任意の倍率αで拡大するためのもので、角度プリズム11に入射した測定光は、偏角がα倍拡大してCCDカメラ12に出射される。
【0019】
次に、CCDカメラに出射した測定光を用いて具体的に偏角の計算方法を説明する。本実施例においては、被測定物の偏角を直接計測する目的のものではなく、基準となる光学部品の偏角と比較して被測定物の偏角がどの程度の微小な誤差を有しているかを精度良く計測するためのものである。そのため、偏角測定にあたって、先ず、偏角が既知である基準となる光学部品を被測定物の代わりに測定系に挿入して、測定光を基準となる光学部品に照射し、角度プリズムを経由してCCDカメラのモニターの中心部に結像させ、この結像点を基準値とする。次に、基準となる光学部品に代え被測定物を測定系に挿入して、測定光を被測定物に照射し、角度プリズムを経由してCCDカメラのモニターに結像させ、この結像点と既知である基準値との距離の差を計測することにより基準となる光学部品と被測定物との偏角の誤差を識別するものである。そこで、両者の偏角の差と、CCDカメラに結像した基準値と測定値と間の距離の関係がどのようになるか具体的な計算例を用いて説明する。
【0020】
図4は、本発明に係わる偏角測定装置及び方法の第二の実施形態において、測定光が出射される様子を示す。
角度プリズムを挿入しない状態で、測定光が被測定物を透過し、CCDカメラに出射した際に測定光が曲げられた距離をS1、被測定物からCCDカメラまでの距離をL1、その時の偏角をθ2−θ1とし、測定系に角度プリズムを挿入した状態で、測定光が被測定物を透過した後、角度プリズムを介してCCDカメラに出射した際に測定光が曲げられた距離をS2、角度プリズムからCCDカメラまでの距離をL4、及び、θ3、θ4、θ5を図4に示した角度とすると以下の関係式であらわすことが出来る。
S2=L4×tan(θ5−θ4) ・・・・・(1)
又、大気の屈折率をn0、被測定物の屈折率をn1、角度プリズムの屈折率をn2とすると、
n0×sinθ5=n2×sin(θ4+θ3) ・・・・・(2)
n2×sinθ3=n0×sin(θ2−θ1) ・・・・・(3)
n0×sinθ2=n1×sinθ1 ・・・・・(4)
の関係式が成り立つので、式(1)、(2)、(3)、(4)よりθ5は、
θ5=sin−1((n1/n0)×sin(θ4+sin−1((n0/n2
)×sin(sin−1((n1/n0)×sinθ1)−θ1))))・・・・・(5)
により求められる。
【0021】
そこで、先ず、測定系に基準となる光学部品を挿入した場合について、これを計算例Aとして、L1=1000mm(L2=50mm、L3=10mm、L4=940mm)、n0=1、n1=n2=1.51、θ1=1°、θ4=30°としθ5Aを求めてみると、式(5)より
θ5A≒49.70°
S2Aは、式(1)より
S2A≒336.57mm
が求められる。
【0022】
一方、次に被測定物を測定系に挿入し、これを計算例Bとして、 L1=1000mm(L2=50mm、L3=10mm、L4=940mm)、n0=1、n1=n2=1.51、θ1=1.05°、θ4=30°の場合について、同様にθ5Bを求めてみると、式(5)より
θ5B≒56.56°
S2Bは、式(1)より
S2B≒469.9mm
が求められる。従って、計算例AとBの両者の差を求めると
S2B−S2A=133.33mm
となり、基準となる光学部品の偏角に対して、被測定物の偏角が0.05°(3′)の角度差を有する時に、S2の距離に換算すると133.33mmとなる。従って、上述したような計算例を基に各角度差に対するS2の距離が換算できるので、本測定系において、被測定物を挿入しCCDカメラに測定光を結像させた際に、この結像点と前記基準点との距離を計測することにより、基準となる光学部品に対して被測定物の偏角がどの程度誤差を有しているかの計測が可能となる。
【0023】
次に、本第二の実施形態が、従来の偏角測定方法の如く測定系に角度プリズムを挿入しない場合に比べ、どの程度分解能が改善されたかを説明する。
そこで、角度プリズムを挿入しない場合について、前述したような計算方法と同様に、図4を用いて角度差に対する距離を計算する。
測定光が被測定物を透過し、CCDカメラに出射した際に測定光が曲げられた距離をS1、被測定物からCCDカメラまでの距離をL1、その時の偏角をθ2−θ1とすると以下の関係式であらわすことが出来る。
S1=L1×tan(θ2−θ1) ・・・・・(6)
又、大気の屈折率をn0、被測定物の屈折率をn1とすると、
n0×sinθ2=n1sinθ1 ・・・・・(7)
の関係式が成り立つので、式(6)、(7)よりS1は、
S1=L1×tan(sin−1(n1×sinθ1/n0)) ・・・(8)
により求められる。
【0024】
そこで、先ず、測定系に基準となる光学部品を挿入した場合について、これを計算例Cとして、L1=1000mm、n0=1、n1=1.51、
θ1=1°とし、S1Cを求めてみると、式(8)より
S1C≒26.36mm
が求められる。
【0025】
一方、次に被測定物を測定系に挿入し、これを計算例Dとして、L1=1000mm、n0=1、n1=1.51、θ1=1.05°の場合についてS1Dを求めてみると、式(8)より
S1D≒27.68mm
が求められる。従って、両者の差を求めると
S1D−S1C=1.32mm
となり、基準となる光学部品の偏角に対して、被測定物の偏角が0.05°(3′)の角度差を有する時に、S1の距離に換算すると1.32mmとなる。従って、角度プリズムを挿入した場合の分解能に比べて大きく劣化している。
【0026】
以上の計算結果より、角度θ4の角度プリズムを測定系に挿入することにより、偏角量に対する距離の関係が拡大し、より精度の高い偏角測定が可能となる。又、偏角量に対する距離の関係の拡大量は、角度プリズムのθ4の角度で調整することが可能である。
尚、第二の実施形態においては、結像点の距離の計測にCCDカメラを使用したが、板状のスクリーンを用意し投射される結像点の距離を計測しても良い。
従って本第二の実施形態においても、コンパクトで高精度な偏角測定装置が実現出来る。
【0027】
【発明の効果】
上述したように、請求項1及び4記載の発明は、受光器の前面にスリット孔を有する遮光板を設け、この遮光板を移動させて受光量のピーク値を求め、基準値とピーク値との距離を求めることにより高精度な偏角測定と、且つ、コンパクトな測定系を構成出来、光学部品の偏角を測定する上で著しい効果を発揮することが可能である。
【0028】
請求項5及び6記載の発明は、測定系に角度プリズムを挿入することにより偏角が拡大され、基準となる光学部品が有する偏角に対して、被測定物が有する偏角の微小な誤差を高精度で計測でき、光学部品の偏角を測定する上で著しい効果を発揮することが可能である。
【図面の簡単な説明】
【図1】本発明に係る偏角測定装置及び方法の第一の実施形態を示す機能図である。
【図2】本発明に係わる偏角測定装置及び方法の第一の実施形態において、基準データと被測定データをグラフ化した図である。
【図3】本発明に係る偏角測定装置及び方法の第二の実施形態を示す機能図である。
【図4】本発明に係わる偏角測定装置及び方法の第二の実施形態において、測定光が出射される様子を示す。
【図5】従来の偏角測定装置の一例である。
【符号の説明】
1・・光源、 2・・被測定物、
3・・スクリーン、 4・・レンズ、
5・・受光器、 6・・スリット孔、
7・・遮光板、 8・・ガイド、
9・・モータ、 10・・歯車、
11・・角度プリズム、 12・・CCDカメラ
Claims (6)
- 測定光を出射する光源と、該光源が出射した測定光を集光しビーム化するレンズと、ビーム化した測定光の光軸上に配置した受光器と、前記受光器の光源側前面にスリット孔を有する遮光板と、該遮光板を移動するための駆動手段と、前記遮光板の移動量を検出する移動量検出手段とを備えており、
前記レンズから出射する測定光の光軸上に被測定物を配置して該被測定物の光路偏角を測定することを特徴とする偏角測定装置。 - 前記遮光板をその主面が前記レンズから出射する測定光の光軸に対してほぼ直交するよう配置すると共に、前記主面に平行な方向に移動可能としたことを特徴とする請求項1に記載の偏角測定装置。
- 前記スリット孔はその長手方向が前記遮光板の移動方向と直交するように形成されていることを特徴とする請求項1又は2に記載の偏角測定装置。
- 測定光を出射する光源と、該光源が出射した測定光を集光しビーム化するレンズと、ビーム化した測定光の光軸上に配置した受光器と、前記受光器の光源側前面にスリット孔を有する遮光板と、該遮光板を移動するための駆動手段と、前記遮光板の移動量を検出する移動量検出手段とを備えた偏角測定装置を用いて、
前記レンズから出射する測定光の光軸上に戴置された被測定物の光路偏角を測定する方法であって、
被測定物を前記偏角測定装置に戴置しない状態において、前記遮光板を移動させながらその移動量と前記受光器の出力とを測定し、前記受光器の出力が最大となったときの前記遮光板の位置を第一のピーク値として認識するステップと、
被測定物を戴置した状態において、前記遮光板を移動させながらその移動量と前記受光器の出力とを測定し、前記受光器の出力が最大となったときの前記遮光板の位置を第二のピーク値として認識するステップと、
被測定物を戴置した位置から前記受光器までの距離をAとし前記第一のピーク位置から第二のピーク位置までの距離をBとして、被測定物の偏角θを次式
θ=tan−1(B/A)
に基づいて算出するステップとを含んだことを特徴とする偏角測定方法。 - 測定光を出射する光源と、該光源が出射した測定光の光軸上に配置した角度プリズムと、該角度プリズムから出射した測定光の光軸上に配置した受光器とを備えており、
前記光源から出射する測定光の光軸上に基準となる光学部品及び被測定物を順次配置して被測定物の偏角誤差を測定することを特徴とする偏角測定装置。 - 測定光を出射する光源と、該光源が出射した測定光の光軸上に配置した角度プリズムと、該角度プリズムから出射した測定光の光軸上に配置した受光器とを備えた偏角測定装置を用いて、
前記光源から出射する測定光の光軸上に戴置された被測定物の偏角誤差を測定する方法であって、
基準となる光学部品を前記偏角測定装置に戴置して、前記光源が出射する測定光を受光器に結像させた点を基準点とするステップと、
被測定物を前記偏角測定装置に戴置して、前記光源が出射する測定光を受光器に結像させた結像点と前記基準点との間の距離を計測するステップと、
計測した前記距離を基に基準となる光学部品が有する偏角に対する被測定物が有する偏角誤差を算出するステップとを含んだことを特徴とする偏角測定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003049524A JP2004257882A (ja) | 2003-02-26 | 2003-02-26 | 偏角測定装置及び偏角測定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003049524A JP2004257882A (ja) | 2003-02-26 | 2003-02-26 | 偏角測定装置及び偏角測定方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004257882A true JP2004257882A (ja) | 2004-09-16 |
Family
ID=33115223
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003049524A Withdrawn JP2004257882A (ja) | 2003-02-26 | 2003-02-26 | 偏角測定装置及び偏角測定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004257882A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103791858A (zh) * | 2014-01-26 | 2014-05-14 | 中国人民解放军国防科学技术大学 | 用于小角度测量的共光路激光干涉装置及测量方法 |
| CN104568382A (zh) * | 2014-12-20 | 2015-04-29 | 中国科学院西安光学精密机械研究所 | 一种Sagnac干涉仪两臂角度误差测量系统及方法 |
| CN107228755A (zh) * | 2017-06-09 | 2017-10-03 | 中国工程物理研究院激光聚变研究中心 | 一种反射镜角漂稳定性测试系统与方法 |
| CN108918086A (zh) * | 2018-06-28 | 2018-11-30 | 江苏轩博电子科技有限公司 | 一种智能门禁系统显示屏光照检测装置 |
| CN119086013A (zh) * | 2024-08-21 | 2024-12-06 | 长园视觉科技(珠海)有限公司 | 光轴角偏移量测试系统和方法 |
-
2003
- 2003-02-26 JP JP2003049524A patent/JP2004257882A/ja not_active Withdrawn
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103791858A (zh) * | 2014-01-26 | 2014-05-14 | 中国人民解放军国防科学技术大学 | 用于小角度测量的共光路激光干涉装置及测量方法 |
| CN104568382A (zh) * | 2014-12-20 | 2015-04-29 | 中国科学院西安光学精密机械研究所 | 一种Sagnac干涉仪两臂角度误差测量系统及方法 |
| CN107228755A (zh) * | 2017-06-09 | 2017-10-03 | 中国工程物理研究院激光聚变研究中心 | 一种反射镜角漂稳定性测试系统与方法 |
| CN108918086A (zh) * | 2018-06-28 | 2018-11-30 | 江苏轩博电子科技有限公司 | 一种智能门禁系统显示屏光照检测装置 |
| CN108918086B (zh) * | 2018-06-28 | 2020-07-10 | 丹阳博亚新材料技术服务有限公司 | 一种智能门禁系统显示屏光照检测装置 |
| CN119086013A (zh) * | 2024-08-21 | 2024-12-06 | 长园视觉科技(珠海)有限公司 | 光轴角偏移量测试系统和方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI507659B (zh) | 三維形狀測量裝置 | |
| EP1840502B1 (en) | Optical interferometer for measuring changes in thickness | |
| US20180172431A1 (en) | Optical characteristic measuring apparatus and optical characteristic measuring method | |
| US10942063B2 (en) | Apparatus and method for measuring amplitude of scanning reflector | |
| JP2004257882A (ja) | 偏角測定装置及び偏角測定方法 | |
| JP2019215262A (ja) | 分光測定装置及び分光測定方法 | |
| EP0388559A2 (en) | Method and apparatus for measuring incident light angle relative to a reference | |
| JP3749152B2 (ja) | レンズメータ | |
| US8541760B2 (en) | Method for calibrating a deflection unit in a TIRF microscope, TIRF microscope, and method for operating the same | |
| CN111220088A (zh) | 测量系统和方法 | |
| US20040196448A1 (en) | Optical assembly to be mounted on a microscope for measuring periodic movements of a microstructure | |
| JP2007192685A (ja) | 面位置検出装置、露光装置及びデバイスの製造方法 | |
| JPS62502421A (ja) | 二次元の対象物を整向、検査及び/または測定するための装置 | |
| JP2013148437A (ja) | 合焦検出装置、波面収差測定装置およびレンズの製造方法 | |
| CN112540044A (zh) | 一种椭圆偏振测量设备及其聚焦方法和测量方法 | |
| JP4635371B2 (ja) | 波面変換光学系、面形状測定装置、及び面形状測定方法 | |
| JP3437479B2 (ja) | 複屈折測定装置 | |
| JP3348975B2 (ja) | レンズメ−タ | |
| WO2020175694A1 (ja) | 分光測定装置 | |
| JP3967058B2 (ja) | 板状のワークの表面形状と板厚の測定方法および測定装置 | |
| JP2007240168A (ja) | 検査装置 | |
| JP2012229983A (ja) | 変位センサ | |
| JP2006292513A (ja) | 屈折率分布型レンズの屈折率分布測定方法 | |
| KR100738387B1 (ko) | 비축 조사에 의한 파면 측정장치 | |
| JP4509593B2 (ja) | 棒状体の芯ぶれ検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Effective date: 20060207 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20060207 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20070402 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20070802 |