JP2004265134A - トラックボール - Google Patents
トラックボール Download PDFInfo
- Publication number
- JP2004265134A JP2004265134A JP2003054662A JP2003054662A JP2004265134A JP 2004265134 A JP2004265134 A JP 2004265134A JP 2003054662 A JP2003054662 A JP 2003054662A JP 2003054662 A JP2003054662 A JP 2003054662A JP 2004265134 A JP2004265134 A JP 2004265134A
- Authority
- JP
- Japan
- Prior art keywords
- ball
- axis
- menu
- torque
- trackball
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images














Landscapes
- Position Input By Displaying (AREA)
Abstract
【課題】ボールの操作者に対して相隣接する2つのメニューの境目でクリック感を伝えること。
【解決手段】ボール(11)と、このボールの移動を検出する画像センサ(12)と、ボールをX方向に回転させる第1の駆動手段(13x,14x,15x,16x)と、ボールをY方向に回転させる第2の駆動手段(13y,14y,15y,16y)とを備えたトラックボール(10)において、制御部(17)は、画像センサで検出されたボールの移動量を示す信号に応答して、ボールの操作者に対してメニュー選択画面(30)上の相隣接する2つのメニューの境目でクリック感を伝えるように、さらに前記メニュー選択画面の壁で前記メニュー選択画面内へ引き戻す働きや変動させるように制御する第1および第2の駆動手段を制御する。
【選択図】 図2
【解決手段】ボール(11)と、このボールの移動を検出する画像センサ(12)と、ボールをX方向に回転させる第1の駆動手段(13x,14x,15x,16x)と、ボールをY方向に回転させる第2の駆動手段(13y,14y,15y,16y)とを備えたトラックボール(10)において、制御部(17)は、画像センサで検出されたボールの移動量を示す信号に応答して、ボールの操作者に対してメニュー選択画面(30)上の相隣接する2つのメニューの境目でクリック感を伝えるように、さらに前記メニュー選択画面の壁で前記メニュー選択画面内へ引き戻す働きや変動させるように制御する第1および第2の駆動手段を制御する。
【選択図】 図2
Description
【0001】
【発明の属する技術分野】
本発明はディスプレイ画面(操作画面)上の位置指定や座標データの入力に使用する入力装置であるポインティング・デバイスに関し、特に、メニュー選択画面上に表示された複数のメニューの中から特定の1つのメニューを選択するために用いられるトラックボールに関する。
【0002】
【従来の技術】
この技術分野において周知のように、パーソナル・コンピュータなどのコンピュータの入力装置としてポインティング・デバイスが使用される。コンピュータはカー・ナビゲーション・システムであっても良い。ポインティング・デバイスは、ディスプレイ画面上の位置指定や座標データの入力に使用される。ポインティング・デバイスには、マウスやトラックボール、トラックパッドなどがある。
【0003】
トラックボールは、マウスをひっくり返したような構造をしており、直接ボールを回転させることでコントロールする。トラックボールは、マウスと異なり移動させるスペースが必要ない。
【0004】
トラックボールには光学式トラックボールがある。光学式トラックボールは、ボールが物理的にローラを回転させて情報を入力するのではなく、光の反射を利用して情報を入力するものである。この光学式トラックボールの場合、メンテナンスが不要であり、正確なコントロールが可能になる。
【0005】
このようなトラックボールをカー・ナビゲーション・システムの車載用ポインティング・デバイスとして使用する場合の例について説明する。カー・ナビゲーション・システムは、車載コンピュータの地図画面上に現在位置を表示し、目的地へのルートをガイドするシステムである。カー・ナビゲーション・システムでは、上述したようにディスプレイ画面(操作画面)を地図画面として使用するが、メニューを選択するために、ディスプレイ画面(操作画面)をメニュー選択画面としても使用している。
【0006】
操作画面が地図画面の場合、操作者がトラックボールのボールを操作(回転)することによって、マウスの場合と同様に、地図画面上のポインタ(カーソル)を360度どの方向にも連続的に移動したり、地図画面上に表示されている地図を連続的に移動(シフト)させることができる。このようなトラックボールの動作のことをここでは「通常トラックボール動作」と呼ぶことにする。また、トラックボールに通常トラックボール動作を行わせる操作者の操作を「通常トラックボール操作」と呼ぶことにする。
【0007】
一方、図1に示されるように、操作画面30がメニュー選択画面であるとする。図1に示されたメニュー選択画面は、ラジオ局を選択するためのラジオ局選択画面である。この場合、通常トラックボール操作によってトラックボールに上述した通常トラックボール動作を行わせると、操作者にとってはポインタ(カーソル)の合わせる位置がしぼり難くなる。すなわち、操作画面がメニュー選択画面の場合、通常トラックボール操作をしたのでは、操作者にとって使い勝手のよいものとはいえない状況になる。したがって、通常トラックボール操作以外に、操作画面がメニュー選択画面等の場合において、ポインタの位置決めを容易に行うことが可能な別の操作が行えることが望まれている。
【0008】
このような操作として、トラックボールにクリック感を持たせるようにした「トラックボール」が、例えば、特許文献1などに開示されている。この特許文献1では、トラックボールの外周に接するローラを介して、トラックボールのX/Y方向の回転移動量を検出するロータリエンコーダに、それぞれクリック機構を設けて、操作者にトラックボールの回転のクリック感を与えている。このようなクリック感を伴うトラックボールの動作をここでは「クリックトラックボール動作」と呼ぶことにする。また、トラックボールにクリックトラックボール動作を行わせる操作者の操作を「クリックトラックボール操作」と呼ぶことにする。尚、特許文献1では、クリック機構の作動、非作動を切換える切換手段をも開示している。
【0009】
また、本発明に関連する先行技術として、回転体(ボール)に対して負荷が与えられている状態で回転体を操作したときに、回転体に与えられた操作力に応じた検出信号を出力できる「コントローラ」が、例えば、特許文献2に開示されている。この特許文献2では、回転体の回転に応じた信号を出力する検出部と、回転体に対して負荷を与える駆動部とを独立にして設けている。
【0010】
更に、本発明に関連する先行技術として、力帰還プロセッサからの力帰還生成と関連するコンピュータ負担を軽減する触覚加速器を含む力帰還インターフェースが、例えば、特許文献3に開示されている。触覚加速器は、インターフェース装置のセンサから受信したユーザ物体の位置を表す生の位置データからユーザ操縦可能物体の動きを記述する速度および/または加速度情報をすばやく決定する。速度および/または加速度データは、力帰還プロセッサによってユーザ物体の出力されるべき力を決定するために使用される。
【0011】
尚、光学式に動きを検出する光学式動き検出手段を備えたポインティング・デバイスは、例えば、特許文献4に開示されている。
【0012】
【特許文献1】
特開平9−282088号公報
【0013】
【特許文献2】
特開2000−214995号公報
【0014】
【特許文献3】
米国特許第5,999,168号明細書
【0015】
【特許文献4】
特開平11−345075号公報
【0016】
【発明が解決しようとする課題】
上述した特許文献1に記載されたトラックボールでは、トラックボールにクリック感を持たせるクリック機構は、機械的なものであり開ループ制御であるので、荷重(負荷)の大きさやクリックピッチは機械的構成によって一意に決定されてしまう。すなわち、トラックボールの移動量に応じて、荷重(負荷)の大きさやクリックピッチを変えることができない。具体的には、図1に図示したようなメニュー選択画面の場合に、特許文献1に開示されたクリック機構では、メニュー選択画面の相隣接する2つのメニューの境目でトラックボールにクリック感を持たせるために、境目に近付くにつれて荷重を徐々に強くし、これを抜けると荷重を弱くする、というような制御を行うことができない。さらに、特許文献1は、上述したように、クリック機構の作動、非作動を切換える切換手段を開示しているものの、その切換えは、操作画面の種類とは無関係に行われる。
【0017】
尚、特許文献2は、回転体(ボール)に対して駆動部から負荷を与えているだけであって、トラックボールにクリック感を持たせることは何ら意図していない。すなわち、特許文献2では、負荷の大きさを回転体(ボール)の移動量に応じて制御すること等は何ら行っていない。換言すれば、特許文献2では、帰還制御を行っていない。
【0018】
特許文献3は、力帰還について開示しているだけであって、トラックボールにクリック感を持たせることについては開示していない。
【0019】
尚、特許文献4は、単に光学式ポインティング・デバイスを開示しているに過ぎない。
【0020】
したがって、本発明の課題は、ボールの操作者に対して相隣接する2つのメニューの境目でクリック感を伝えることができるトラックボールを提供することにある。
【0021】
【課題を解決するための手段】
本発明によれば、メニュー選択画面(30)上に表示された複数のメニューの中から特定の1つのメニューを選択するために用いられるトラックボール(10)であって、ボール(11)と、このボールの移動を検出する移動検出手段(12;18x,18y)と、ボールをX方向に回転させる第1の駆動手段(13x,14x,15x,16x)と、ボールをY方向に回転させる第2の駆動手段(13y,14y,15y,16y)と、移動検出手段で検出されたボールの移動量を示す信号に応答して、ボールの操作者に対して相隣接する2つのメニューの境目でクリック感を伝えるように、さらに前記移動検出手段で検出された前記ボールの移動量を示す信号に応答して、前記ボールの操作者に対して前記メニュー選択画面の前記メニュー間における端の壁で操作者に操作感を伝えるように前記第1および前記第2の駆動手段を制御する制御手段(17)とを有するトラックボール(10)が得られる。
【0022】
尚、上記括弧内の符号は、本発明の理解を容易にするために付したものであり、一例にすぎず、これらに限定されないのは勿論である。
【0023】
【発明の実施の形態】
以下、図面を参照して、本発明の実施の形態について詳細に説明する。
【0024】
図2乃至図4を参照して、本発明の第1の実施の形態に係るトラックボールについて説明する。図2は、トラックボール10とそれに接続されたパーソナル・コンピュータ(PC)20とを示すブロック図である。図3はトラックボール10の概略平面図、図4はトラックボール10の概略正面図である。
【0025】
図示の例では、パーソナル・コンピュータ20がカー・ナビゲーション・システムの場合の例を示している。すなわち、図示の例は、トラックボール10を、カー・ナビゲーション・システムのポインティング・デバイスとして使用している例である。
【0026】
尚、カー・ナビゲーション・システム20は、前述したように、車載コンピュータの地図画面上に現在位置を表示し、目的地へのルートをガイドするシステムである。カー・ナビゲーション・システム20では、上述したように、ディスプレイ画面(操作画面)(図示せず)を地図画面として使用すると共に、メニューを選択するために、ディスプレイ画面(操作画面)をメニュー選択画面としても使用している。
【0027】
操作画面が地図画面の場合、操作者がトラックボール10を操作(回転)することによって、マウスの場合と同様に、地図画面上のポインタ(カーソル)を360度どの方向にも連続的に移動したり、地図画面上に表示されている地図を連続的に移動(シフト)させることができる。すなわち、通常トラックボール操作によってトラックボール10に通常トラックボール動作を行わせることができる。
【0028】
一方、操作画面30が図1に示されるようなメニュー選択画面であるとする。この場合、通常トラックボール操作によってトラックボール10に上述した通常トラックボール動作をさせると、操作者にとってはポインタ(カーソル)の合わせる位置がしぼり難くなる。すなわち、操作画面がメニュー選択画面の場合、通常トラックボール操作をしたのでは、操作者にとって使い勝手のよいものとはいえない状況になる。
【0029】
そこで、本発明に係るトラックボール10では、通常トラックボール操作以外に、操作画面がメニュー選択画面等の場合において、ポインタの位置決めを容易に行うことが可能なクリックトラックボール操作をも行わせるようにしている。すなわち、操作画面が地図画面の場合には通常トラックボール動作を行うようにし、操作画面がメニュー選択画面の場合にはクリックトラックボール動作を行うようにしている。換言すれば、操作画面の種類に応じて、トラックボール10の操作者に対して異なった操作感触を伝えるようにしている。
【0030】
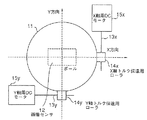
図3および図4に示されるように、トラックボール10は、ボール11を有する。このボール11は、図示しない筐体に全方向に回転自在に保持されている。このボール11の上部は、筐体の上面に形成された円形の開口部(図示せず)から上方へ突出している。
【0031】
トラックボール10は、このボール11の移動を検出する画像センサ12を備えている。この画像センサ12は、図示しない発光ダイオード(LED)から出射されたセンサ用LED光がボール11で反射された反射光を受光することによって、ボール11の移動を検出するものである。尚、この画像センサ12を用いた光学的移動検出手段の詳細な動作説明は、前述した特許文献4等に記載されているので、それを参照されたい。したがって、図示のトラックボール10は、光学式移動検出手段12を備えた光学式トラックボールである。
【0032】
ボール11の外周には、直交する半径に対して直角の方向(Y方向、X方向)にそれぞれ延在するX軸回転軸13x、Y軸回転軸13yを有するX軸トルク伝達ローラ14x、Y軸トルク伝達ローラ14yが当接している。X軸回転軸13xの一端にはX軸用DCモータ15xが設けられており、Y軸回転軸13yの一端にはY軸用DCモータ15yが設けられている。
【0033】
図2に示されように、X軸用DCモータ15xはX軸モータドライバ16xによって駆動され、Y軸用DCモータ15yはY軸モータドライバ16yによって駆動される。画像センサ12によって検出されたボール11の移動量を示す信号は制御部17へ送られる。制御部17は、例えば、マイクロコンピュータによって実現され得る。このボール11の移動量を示す信号に応答して、制御部17は、後述するように、X軸モータドライバ16xおよびY軸モータドライバ16yへそれぞれX軸モータ駆動指令およびY軸モータ駆動指令を送出して、X軸用DCモータ15xおよびY軸用DCモータ15yの駆動を制御する。
【0034】
とにかく、X軸回転軸13x、X軸トルク伝達用ローラ14x、X軸用DCモータ15x、およびX軸モータドライバ16xの組み合わせは、ボール11をX方向に回転させる第1の駆動手段として動作する。同様に、Y軸回転軸13y、Y軸トルク伝達用ローラ14y、Y軸用DCモータ15y、およびY軸モータドライバ16yの組み合わせは、ボール11をY方向に回転させる第2の駆動手段として動作する。
【0035】
制御部17は、後述するように、操作画面の種類に応じて、第1および第2の駆動手段を制御して、ボール11の操作者に対して異なった操作感触を伝える。
【0036】
次に、図1乃至図4を参照して、制御部17における具体的な動作例について説明する。カー・ナビゲーション・システム20は、ディスプレイ画面(操作画面)30を有する。この操作画面30は、地図を表示する地図画面と、図1に図示されるような、メニューを選択するためのメニュー選択画面との間で切換えが可能である。現在の操作画面30の種類を示す画面情報は、カー・ナビゲーション・システム20から制御部17へ送出される。
【0037】
画面情報が、現在の操作画面30が地図画面であることを示しているとする。この場合、制御部17は、通常トラックボール動作を行うように、第1および第2の駆動手段を制御する。詳述すると、制御部17は、X軸モータドライバ16xおよびY軸モータドライバ16yへそれぞれX軸モータ駆動指令およびY軸モータ駆動指令を送出しない。換言すると、通常トラックボール動作では、制御部17は、第1および第2の駆動手段を何ら制御しない。その結果、操作者は自由に(何ら違和感なく)ボール11を全方向に回転することができる。
【0038】
一方、画面情報が、現在の操作画面30が図1に示されるようなメニュー選択画面であることを示しているとする。この場合、制御部17は、クリックトラックボール動作を行うように、第1および第2の駆動手段を制御する。詳述すると、図1に示すメニュー選択画面は、3×3=9個の桝目(メニュー)を持ち、ポインタとしてのコマがこれら9個の桝目を移動してその中の1つを選択する。各桝目(メニュー)は特定のラジオ局を指している。制御部17は、画像センサ12からのボール11の移動量を示す信号に応答して、メニュー選択画面の相隣り合う2つの桝目(メニュー)の境目でトラックボール10にクリック感を持たせるために、桝目の境目に近付くにつれて荷重を徐々に強くし、これを抜けると荷重を弱くするというように、第1および第2の駆動手段を制御する。これにより、ボール11の操作者に対して、マウスのホイール操作のようなクリック感を伝えることが可能となる。したがって、コマの行き過ぎや、操作性の悪さを解消することができる。
【0039】
次に、クリックトラックボール動作について具体例を挙げて更に詳細に説明する。
【0040】
ここでは、操作画面30が、図5に示されるようなメニュー選択画面である場合を例にとって説明する。すなわち、図5に図示したメニュー選択画面30は、5行、5列の計25個の桝目(メニュー)を持つ。ここでは、一番上の行から最下行をそれぞれ第1乃至第5行と呼び、一番右側の列から一番左側の列をそれぞれ第1乃至第5行と呼ぶことにする。したがって、第3行が中央行であり、第3列が中央列である。第1列では、第1行から第5行がそれぞれ「あ」、「い」、「う」、「え」、および「お」である。第2列では、第1行から第5行がそれぞれ「か」、「き」、「く」、「け」、および「こ」である。第3列、すなわち、中央列では、第1行から第5行がそれぞれ「さ」、「し」、「す」、「せ」、および「そ」である。第4列では、第1行から第5行がそれぞれ「た」、「ち」、「つ」、「て」、および「と」である。第5行では、第1行から第5行がそれぞれ「な」、「に」、「ぬ」、「ね」、「の」である。
【0041】
ポインタ(カーソル)がメニュー選択画面30の中央列(第3列)の中央にあるとき、X軸のカウント値(累積値)が0であり、それよりポインタが右側へ移動すると正にカウントされ、左側へ移動すると負にカウントされる。同様に、ポインタ(カーソル)がメニュー選択画面30の中央行(第3行)の中央にあるとき、Y軸のカウント値(累積値)が0であり、それよりポインタが上側へ移動すると正にカウントされ、下側へ移動すると負にカウントされる。
【0042】
メニュー選択画面30において、中央列(第3列)は、X軸のカウント値(累積値)が−31から31の範囲内にあり、第2列は、X軸のカウント値(累積値)が32から94の範囲内にあり、第1列は、X軸のカウント値(累積値)が95から157の範囲内にあり、第4列は、X軸のカウント値(累積値)が−32から−94の範囲内にあり、第5列は、X軸のカウント値(累積値)が−95から−157の範囲内にある。
【0043】
同様に、メニュー選択画面30において、中央行(第3行)は、Y軸のカウント値(累積値)が−31から31の範囲内にあり、第2行は、Y軸のカウント値(累積値)が32から94の範囲内にあり、第1行は、Y軸のカウント値(累積値)が95から157の範囲内にあり、第4行は、Y軸のカウント値(累積値)が−32から−94の範囲内にあり、第5行は、Y軸のカウント値(累積値)が−95から−157の範囲内にある。
【0044】
したがって、たとえば、ポインタ(カーソル)が、メニュー選択画面30上のX軸のカウント値(累積値)が−31から31の範囲にあって、Y軸のカウント値(累積値)が−31から31の範囲にあるとき、中央列(第3列)で、中央行(第3行)である「す」を選択している。
【0045】
制御部17は、図6に示されるような、ボール11の移動量に応じたX軸用DCモータ15xに対するトルク量を示すX軸トルクテーブル40xを有する。図6に示されるように、このX軸トルクテーブル40xには、ポインタがメニュー選択画面30における各メニューの中心にあるときは零で、それよりポインタがX軸に沿って移動してメニューの境目へ近付くにつれてその中心へ戻すように徐々に強くなるようなトルク量が記載されている。
【0046】
同様に、図示はしないが、制御部17は、ボール11の移動量に応じたY軸用DCモータ15yに対するトルク量を示すY軸トルクテーブルを有する。このY軸トルクテーブルには、ポインタがメニュー選択画面30における各メニューの中心にあるときは零で、それよりポインタがY軸に沿って移動してメニューの境目へ近付くにつれてその中心へ戻すように徐々に強くなるようなトルク量が記載されている。
【0047】
図6に図示されたX軸トルクテーブル40xについて更に詳述する。X軸用DCモータ15xは、パルス幅変調(PWM)されたDC電圧で駆動され、その衝撃係数(duty)を変えることによって、X軸用DCモータ15xに対するトルク量を変えることができる。すなわち、衝撃係数が大きいほど、トルク量も大きくなる。
【0048】
図6のX軸トルクテーブル40xにおいて、最上欄にはX軸の累積値(カウント値)を示し、最左蘭にはY軸の累積値(カウント値)を示している。X軸トルクテーブル40xは、X軸の累積値およびY軸の累積値に対する衝撃係数を示している。尚、負の衝撃係数は、X軸用DCモータ15xに印加されるDC電圧の極性が負であることを示している。尚、制御部17は、図示しないX軸カウンタおよびY軸カウンタを備えている。X軸カウンタはX軸の累積値(カウント値)を保持し、Y軸カウンタはY軸の累積値(カウント値)を保持している。
【0049】
尚、Y軸トルクテーブルは、図6に図示されたX軸トルクテーブル40xにおいて、最上欄におけるX軸の累積値をY軸の累積値に変更し、最左蘭におけるY軸の累積値をX軸の累積値に変更したものである。
【0050】
次に、図6に加えて図7をも参照して、具体例を挙げて説明する。図7は、図6に示すX軸トルクテーブル40xの衝撃係数とモータ印加電圧(トルク)との関係を図示している。図7において、横軸はX軸のカウント値を、縦軸はモータ印加電圧(正回転トルク、負回転トルク)を示している。衝撃係数が正でその値が大きくなればなるほど、正回転トルクが大きくなる。また、衝撃係数が負でその値が大きければなるほど、負回転トルクが大きくなる。ここで、正回転トルクとは、ボール11をX軸の正方向(図5における右側の方向)へ移動させようとするトルクをいい、負回転トルクとは、ボール11をX軸の負方向(図5における左側の方向)へ移動させようとするトルクをいう。
【0051】
尚、X軸のカウント値xおよびY軸のカウント値yを座標(x,y)で表すことにする。
【0052】
Y軸の累積値(カウント値)が0の状態において、X軸の累積値(カウント値)を0から変化させたとする。すなわち、ポインタ(カーソル)の初期位置が、メニュー選択画面30の中央にあるメニュー「す」の中心(0,0)にあって、その初期位置(0,0)から、操作者がボール11をX方向へ回転させるように操作したとする。
【0053】
たとえば、図5に示すメニュー選択画面30において、ポインタをメニュー「す」からその右隣のメニュー「く」の方向へ移動させるために、操作者がボール11をX軸の正方向へ回転させたとする。このとき、画像センサ12によってボール11がX軸の正方向へ回転したことが検出され、その移動量を示す信号が制御部17へ送られる。この移動量を示す信号に応答して、制御部17は累積移動値を算出し、それをX軸のカウント値(累積値)としてX軸カウンタに保持する。このX軸のカウント値(累積値)に基づいて、制御部17は、X軸トルクテーブル40xを参照して、衝撃係数を求める。本例の場合、操作者がボール11をX軸の正方向へ回転しているので、衝撃係数は負である。したがって、制御部17は、この負の衝撃係数を示すX軸モータ駆動指令をX軸モータドライバ16xへ送出して、X軸用DCモータ15xに負回転トルクを与える。すなわち、メニュー選択画面30のメニュー「す」の中心(0,0)へ戻すような負荷をボール11に対して与える。
【0054】
詳述すると、操作者がボール11を手操作によってX軸の正方向へ回転させた場合には、座標(31,0)になるまで、制御部17は、X軸用DCモータ15xへX軸モータドライバ16xを介して加えるPWMの衝撃係数をX軸のカウント値とともに大きくしていく制御を行う。この時、X軸用DCモータ15xには、ボール11を手操作によって回転する方向とは逆方向に回転させる負回転トルクが働いている。すなわち、操作者には、その手操作感が徐々に重く感じられていく。
【0055】
メニュー「す」と「く」との間の境目を越えて座標(32,0)になった時点で、制御部17は、X軸用DCモータ15xの回転方向が、手操作によるボール11の回転方向と同じ方向になるように、回転トルクを負回転トルクから正回転トルクに切換える。そして、座標(63,0)になるまで、制御部17は、X軸用DCモータ15xへX軸モータドライバ16xを介して加えるPWMの衝撃係数をX軸のカウント値とともに小さくしていく制御を行う。このように、操作者の手操作の回転方向と同じ方向にX軸用DCモータ15xを回転することにより、操作者には手操作感が一気に軽くなったように感じられる。
【0056】
このように相隣接する2つのメニュー(上記の例では、メニュー「す」とメニュー「く」)の境目で、回転トルクの方向を切換えるので、操作者にはクリック感が伝えられる。
【0057】
この時、制御部17は、Y軸用DCモータ15yに対してもY軸の方向へ、Y軸トルクテーブルに基づいて、X軸のカウント値およびY軸のカウント値に応じた回転トルクを発生させている。すなわち、操作者がボール11をX軸の方向へ回転させるように操作しようとした場合でも、実際には操作者は必ずしもX軸の方向ばかりでなく、Y軸の方向へも多少回転させるような力をボール11に対して与えてしまうだろう。このような場合でも、制御部17は、常にボール11に対してY座標が0となるような方向へ戻るような回転トルクを、Y軸用DCモータ15yに発生させる。したがって、操作者がボール11をX軸の方向へ回転させようと操作するときに発生する、ボール11のY軸の方向へのブレを抑えることができる。
【0058】
以上では、図5に示すメニュー選択画面30において、ポインタをメニュー「す」からその右隣のメニュー「く」の方向へ移動させるために、操作者がボール11をX軸の正方向へ回転させた場合について述べたが、図5に示すメニュー選択画面30において、ポインタをメニュー「す」からその左隣のメニュー「く」の方向へ移動させるために、操作者がボール11をX軸の負方向へ回転させる場合も同様である。
【0059】
この場合には、画像センサ12によってボール11がX軸の負方向へ回転したことが検出され、その移動量を示す信号が制御部17へ送られる。この移動量を示す信号に応答して、制御部17は累積移動値を算出し、それをX軸のカウント値(累積値)としてX軸カウンタに保持する。このX軸のカウント値(累積値)に基づいて、制御部17は、X軸トルクテーブル40xを参照して、衝撃係数を求める。本例の場合、操作者がボール11をX軸の負方向へ回転しているので、衝撃係数は正である。したがって、制御部17は、この正の衝撃係数を示すX軸モータ駆動指令をX軸モータドライバ16xへ送出して、X軸用DCモータ15xに正回転トルクを与える。すなわち、メニュー選択画面30のメニュー「す」の中心(0,0)へ戻すような負荷をボール11に対して与える。
【0060】
詳述すると、操作者がボール11を手操作によってX軸の負方向へ回転させた場合には、座標(−31,0)になるまで、制御部17は、X軸用DCモータ15xへX軸モータドライバ16xを介して加えるPWMの衝撃係数をX軸のカウント値とともに大きくしていく制御を行う。この時、X軸用DCモータ15xには、ボール11を手操作によって回転する方向とは逆方向に回転させる正回転トルクが働いている。すなわち、操作者には、その手操作感が徐々に重く感じられていく。
【0061】
メニュー「す」と「つ」との間の境目を越えて座標(−32,0)になった時点で、制御部17は、X軸用DCモータ15xの回転方向が、手操作によるボール11の回転方向と同じ方向になるように、回転トルクを正回転トルクから負回転トルクに切換える。そして、座標(−63,0)になるまで、制御部17は、X軸用DCモータ15xへX軸モータドライバ16xを介して加えるPWMの衝撃係数をX軸のカウント値とともに小さくしていく制御を行う。このように、操作者の手操作の回転方向と同じ方向にX軸用DCモータ15xを回転することにより、操作者には手操作感が一気に軽くなったように感じられる。
【0062】
このように相隣接する2つのメニュー(上記の例では、メニュー「す」とメニュー「つ」)の境目で、回転トルクの方向を切換えるので、操作者にはクリック感が伝えられる。
【0063】
上述したように、座標(−31,0)から座標(31,0)までの区間を、メニュー選択画面30上のメニュー「す」の1区間として定義することにより、メニュー「す」の境目(切り替わり付近)で、ボール11の操作者に対して最大トルク(負荷)を発生させ、かつ、回転トルクの方向を切換えている。これにより、現在のメニュー「す」から次のメニュー「く」または「つ」へのクリック感を操作者に対して伝えることができる。そして、上記最大トルクはメニュー切り替わりの軽い障壁として働く。また、操作者がボール11に対する操作を止めたとき(荷重を抜いたとき)は、メニュー選択画面30上のポインタを常に各メニューの中心へ戻すような回転トルクを、制御部17はX軸用DCモータ15xおよびY軸用DCモータ15yに対して発生している。
【0064】
尚、以上では、メニュー選択画面30の初期位置(0,0)から、操作者がボール11をX方向へ回転するように操作した場合の動作について説明したが、メニュー選択画面30の初期位置(0,0)から、操作者がボール11をY方向へ回転するように操作した場合も同様の動作をすることは明らかである。すなわち、この場合も、制御部17は、Y軸のカウント値およびX軸のカウント値に応じた回転トルクを、Y軸用DCモータ15yおよびX軸用DCモータ15xに発生させることで、ボール11をX軸方向へ操作したときと同様の操作感を、操作者に対して伝えることができる。
【0065】
次に、図8を参照して、本発明に係るトラックボールのクリック制御について説明する。先ず、制御部17は、PC(カー・ナビゲーション・システム)20との間で通信を行い、ポートの設定を確認する(ステップS1)。画像センサ12は、ボール11の相対移動量を検出する(ステップS2)。制御部17は、画像センサ12で検出されたボール11の相対移動量から、ボール11の累積移動量を算出する(ステップS3)。制御部17は、累積移動量に応じたパラメータ(PWMの衝撃係数)をテーブル(X軸トルクテーブル40x、Y軸トルクテーブル)より読み取る(ステップS4)。
【0066】
引続いて、制御部17は、テーブルからの読みとり値を相対移動値、およびその他要素により加工する(ステップS5)。制御部17は、PC(カー・ナビゲーション・システム)20へ移動量を出力する(ステップS6)。制御部17は、X軸用DCモータ15xおよびY軸用DCモータ15yへ、X軸モータドライバ16xおよびY軸モータドライバ16yを介して、PWM信号とモータ方向制御信号を送出する(ステップS7)。
【0067】
ところで、トラックボール10のクリック制御では、図5に示したメニュー選択画面30の五十音によるメニュー選択画面30を例とすると、ボール11をX軸の右方向に操作して、メニュー選択画面30上のメニュー「す」、メニュー「く」、メニュー「う」と操作していくと、メニュー「う」でメニュー選択画面30の端に到達する。
【0068】
この際、メニュー選択画面30上においてメニュー「う」のさらに右方向にはメニュー選択画面30が存在しないため、この先へのボール11の回転操作は不要となる。そこで、メニュー選択画面30の端では、壁を検出して制御部17によって制御することにより通常より大きなトルク量でメニュー選択画面30内へ引き戻す働きをさせたり、変動(振動)によりメニュー選択画面30の端を操作者に操作感(クリック感)で認識させるようにしている。
【0069】
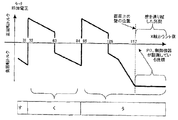
図9は、Y軸カウント値=0のときのX軸カウント値とトルク、メニューの関係を示している。図9を参照して、メニュー選択画面30において、メニュー「く」は、X軸のカウント値(累積値)が32から94の範囲内にあり、メニュー「う」は、X軸のカウント値(累積値)が95から157を通り越した区間を含む範囲内にある。カウント値(累積値)の157は、画面上の壁の位置であり、157は、パーソナル・コンピュータ(カー・ナビゲーション・システム)や制御機器が認識している座標である。
【0070】
操作者に壁を認識させるためには、移動距離がメニュー選択画面30から外へいくことがないように、X軸用DCモータ15xのトルク量を大きくしていく。具体例として、図9の場合には、メニュー「う」の文字の中央よりも右方向にずれた場合は、通常のトルクよりも大きな力でボール11をメニュー「う」の中央に戻す働きをさせる。メニュー選択画面30を越えた領域は、領域内に戻すようにトルクを加え続ける。
【0071】
また、メニュー「う」の壁の付近では、大きなトルクによりスリップが発生する可能性が高くなるため、スリップ検出を行う。これらの操作により、ボール11の操作者は、メニュー選択画面30の隅で大きな反発力を受けたり、スリップ制御によって空転している感触を受ける。
【0072】
なお、スリップ制御は壁以外でも行っている。スリップ制御を行わないと、ボールとローラーの摩擦力が低下したとき(油、水等により)ボール11を戻そうとするモータの回転トルクによりローラーが空転してしまう。また、メニューの切り替わり付近が最もトルクが大きくなるので、空転のスピードも速くなり、不快感をより多く感じる。そこで、スリップ制御を行ってボールとローラーがスリップしない(実際には少量のスリップ)程度までモーターのトルクを弱める制御を行っている。
【0073】
ボール11とローラの摩擦が小さい状態で壁の位置に来た場合、スリップ制御が無いと、より速い回転でローラーが空転するが、スリップ制御があるとスリップしない状態までモータのトルクを落とすため、ローラは殆どスリップしない。壁を操作者に伝えるトルクの変化もボール11とローラの摩擦力が下がるにつれて、小さくなり、通常のクリックとの違いは無くなっていく。しかし、通常の摩擦状態であれば、クリック状態より大きい反発を受ける。一方振動による壁の認識であれば、ボール11とローラの摩擦が小さくなっても、壁を認識させることはできる。従って、スリップし易い状態では、クリック感も弱くなるし、壁と通常のクリックのトルク差が無くなり、より不快な空転は無くなる。
【0074】
また、移動距離がメニュー選択画面30から外へいかないように、X軸用DCモータ15xのトルクを変動(振動)させ、操作者に壁の端を認識させる。具体例として、図9の場合には、メニュー「う」の文字の中央より、右にずれた場合は、通常のトルクでボール11をメニュー「う」の中央に戻す働きをさせる。メニュー選択画面30を越えた領域は、変動(振動)によりトルク量を変動させ壁を認識させる。このように、X軸、Y軸の全ての方向に同様の壁を発生させる。
【0075】
尚、メニュー選択画面30の角隅の部分については、X軸の壁と、Y軸の壁とを同時に作ることによって、角隅を認識させることが可能である。
【0076】
図10では、軽い壁を設ける例を示している。図10を参照して、メニュー選択画面30において、メニュー「A」〜「E」の文字は、X軸のカウント値(累積値)が−32から−92の範囲内にあり、メニュー「あ」〜「お」の文字は、X軸のカウント値(累積値)が31から−31の範囲内にあり、メニュー「1」〜「5」の数字は、X軸のカウント値(累積値)が32から94の範囲内にある。
【0077】
同様に、メニュー選択画面30において、メニュー「A」〜「E」の文字、メニュー「あ」〜「お」の文字、メニュー「1」〜「5」の数字は、Y軸のカウント値(累積値)が初期値(0,0)から157に、初期値(0,0)からから−157の範囲内にある。
【0078】
図10に示すように、異なる種類のメニューが同一メニュー選択画面30にある場合、メニュー「A」〜「E」、「あ」〜「お」、「1」〜「5」のような同一種間は移動しやすく、他種メニュー、例えば、「A」〜「E」から「あ」〜「お」へは移動しにくい設定にすることにより操作感を得る。
【0079】
図11は、具体例として、メニュー選択画面30のアルファベット、ひらがな、数字間に壁を設けた例を示している。図11に示すX軸設定において、図10に示したメニュー「C」、メニュー「う」、メニュー「3」では、図12に示すY軸設定におけるY軸相当のトルク量に対して、別種の文字、数字間に通常よりも大きい壁を設けている。
【0080】
図13は、本発明に係るトラックボールのクリック制御における壁検出を説明するためのフローチャートである。図13を参照して、本発明に係るトラックボール10のクリック制御における壁検出について説明する。
【0081】
先ず、図8において説明したように、制御部17は、画像センサ12で検出されたボール11の相対移動量から、ボール11の累積移動量を算出する(ステップS3)。次に、壁を検出しているか否かを判定する(ステップS11)。壁を検出していれば、壁までの累積値に達している否かを判定する(ステップS12)。壁までの累積値に達している場合には、壁用トルク値設定・モータ極性設定を行う(ステップS13)。そして、図8において説明したように、制御部17は、PC(カー・ナビゲーション・システム)20との間で通信を行い、ポートの設定を確認する(ステップS1)。
【0082】
また、ステップS11において、壁を検出していれば、図8のステップ4において説明したように、制御部17は、累積移動量に応じたパラメータ(PWMの衝撃係数)をテーブル(X軸トルクテーブル40x、Y軸トルクテーブル)より読み取る。
【0083】
さらに、ステップS12において、壁までの累積値に達していない場合には、図8のステップ4において説明したように、制御部17は、累積移動量に応じたパラメータ(PWMの衝撃係数)をテーブル(X軸トルクテーブル40x、Y軸トルクテーブル)より読み取る。
【0084】
また、上述した実施の形態では、ボール11の移動を検出する移動検出手段として、図9に示されるような、画像センサ12を使用した光学式移動検出手段を用いているが、その代わりに、図10に示されるような、機械式移動検出手段を用いてもよい。
【0085】
図10に示された機械式移動検出手段は、X軸回転軸13xに設けられたX軸モータ用ロータリエンコーダ18xと、Y軸回転軸13yに設けられたY軸モータ用ロータリエンコーダ18yとを有する。X軸モータ用ロータリエンコーダ18xで検出されたX方向の移動量を示す信号およびY軸モータ用ロータリエンコーダ18yで検出されたY方向の移動量を示す信号は、制御部17(図2)へ送られる。
【0086】
図16は、トルクテーブルと同様の値を計算によりトルク量を算出する方法を示している。この計算方法では、1メニュー区間が63の時、Xのクリック力は、
(1)Xの累積移動値を63で割った時の余りが0の時、トルクT=0
(2)Xの累積移動値を53で割った時の余りが1〜31(xとする)の時、トルクT=x+19
(3)Xの累積移動値を63で割った時の余りが32〜62(xとする)の時、トルクT=−(63−x)−19
上記(1)から(3)により、トルクテーブルと同様の値が算出できる。
【0087】
以上、本発明について好ましい実施の形態によって例を挙げて説明してきたが、本発明は上述した実施の形態に限定しないのは勿論である。例えば、上述した実施例では、トラックボールを、カー・ナビゲーション・システムに用いられる車載用ポインティング・デバイスとして用いる場合を例に挙げて説明しているが、観光地、市役所、郵便局等のあらゆる公共機関の場所に設けられるコンピュータのメニュー選択画面を選択するためにも使用することができる。また、カー・ナビゲーション・システム以外の他のパーソナル・コンピュータ上でも使用することができる。
【0088】
【発明の効果】
以上の説明から明らかなように、本発明では、移動検出手段で検出されたボールの移動量を示す信号に応答して、第1および第2の駆動手段を制御することによって、ボールの操作者に対して相隣接する2つのメニューの境目でクリック感を伝えることができる。
【図面の簡単な説明】
【図1】メニュー選択画面の一例を示す図である。
【図2】本発明の一実施の形態に係るトラックボールを、パーソナル・コンピュータ(カー・ナビゲーション・システム)と共に示すブロック図である。
【図3】図2に図示したトラックボールの概略平面図である。
【図4】図2に図示したトラックボールの概略正面図である。
【図5】図2に図示したトラックボールの動作を説明するためのメニュー選択画面の一例を示す図である。
【図6】図2に図示したトラックボールの制御部に含まれるX軸トルクテーブルの一例を示す図である。
【図7】図6に示すX軸トルクテーブルの衝撃係数とモータ印加電圧(トルク)との関係を示す図である。
【図8】本発明に係るトラックボールのクリック制御を説明するためのフローチャートである。
【図9】図6に示すX軸トルクテーブルの衝撃係数とモータ印加電圧(トルク)との関係において、Y軸カウント値=0のときのX軸カウント値とトルク、メニューの関係を示す図である。
【図10】図2に図示したトラックボールの動作を説明するためのメニュー選択画面の一例を示す図である。
【図11】図9に示したX軸カウント値とトルク、メニューの関係において、X軸設定におけるメニュー選択画面のメニュー間に障壁を設けた例を示す図である。
【図12】図11に示したX軸設定において、Y軸設定におけるメニュー選択画面のメニュー間に障壁を設けた例を示す図である。
【図13】本発明に係るトラックボールのクリック制御における壁検出を説明するためのフローチャートである。
【図14】図2に図示したトラックボールに使用される光学式移動検出手段の概略正面図である。
【図15】本発明の他の実施の形態に係るトラックボールに使用される機械式移動検出手段の概略平面図である。
【図16】トルクテーブルと同様の値を計算により算出する方法を説明するための図である。
【符号の説明】
10 トラックボール
11 ボール
12 画像センサ(光学式移動検出手段)
13x X軸回転軸
13y Y軸回転軸
14x X軸トルク伝達用ローラ
14y Y軸トルク伝達用ローラ
15x X軸用DCモータ
15y Y軸用DCモータ
16x X軸モータドライバ
16y Y軸モータドライバ
17 制御部
18x X軸モータ用ロータリエンコーダ
18y Y軸モータ用ロータリエンコーダ
20 PC(カー・ナビゲーション・システム)
30 操作画面(メニュー選択画面)
40x X軸トルクテーブル
【発明の属する技術分野】
本発明はディスプレイ画面(操作画面)上の位置指定や座標データの入力に使用する入力装置であるポインティング・デバイスに関し、特に、メニュー選択画面上に表示された複数のメニューの中から特定の1つのメニューを選択するために用いられるトラックボールに関する。
【0002】
【従来の技術】
この技術分野において周知のように、パーソナル・コンピュータなどのコンピュータの入力装置としてポインティング・デバイスが使用される。コンピュータはカー・ナビゲーション・システムであっても良い。ポインティング・デバイスは、ディスプレイ画面上の位置指定や座標データの入力に使用される。ポインティング・デバイスには、マウスやトラックボール、トラックパッドなどがある。
【0003】
トラックボールは、マウスをひっくり返したような構造をしており、直接ボールを回転させることでコントロールする。トラックボールは、マウスと異なり移動させるスペースが必要ない。
【0004】
トラックボールには光学式トラックボールがある。光学式トラックボールは、ボールが物理的にローラを回転させて情報を入力するのではなく、光の反射を利用して情報を入力するものである。この光学式トラックボールの場合、メンテナンスが不要であり、正確なコントロールが可能になる。
【0005】
このようなトラックボールをカー・ナビゲーション・システムの車載用ポインティング・デバイスとして使用する場合の例について説明する。カー・ナビゲーション・システムは、車載コンピュータの地図画面上に現在位置を表示し、目的地へのルートをガイドするシステムである。カー・ナビゲーション・システムでは、上述したようにディスプレイ画面(操作画面)を地図画面として使用するが、メニューを選択するために、ディスプレイ画面(操作画面)をメニュー選択画面としても使用している。
【0006】
操作画面が地図画面の場合、操作者がトラックボールのボールを操作(回転)することによって、マウスの場合と同様に、地図画面上のポインタ(カーソル)を360度どの方向にも連続的に移動したり、地図画面上に表示されている地図を連続的に移動(シフト)させることができる。このようなトラックボールの動作のことをここでは「通常トラックボール動作」と呼ぶことにする。また、トラックボールに通常トラックボール動作を行わせる操作者の操作を「通常トラックボール操作」と呼ぶことにする。
【0007】
一方、図1に示されるように、操作画面30がメニュー選択画面であるとする。図1に示されたメニュー選択画面は、ラジオ局を選択するためのラジオ局選択画面である。この場合、通常トラックボール操作によってトラックボールに上述した通常トラックボール動作を行わせると、操作者にとってはポインタ(カーソル)の合わせる位置がしぼり難くなる。すなわち、操作画面がメニュー選択画面の場合、通常トラックボール操作をしたのでは、操作者にとって使い勝手のよいものとはいえない状況になる。したがって、通常トラックボール操作以外に、操作画面がメニュー選択画面等の場合において、ポインタの位置決めを容易に行うことが可能な別の操作が行えることが望まれている。
【0008】
このような操作として、トラックボールにクリック感を持たせるようにした「トラックボール」が、例えば、特許文献1などに開示されている。この特許文献1では、トラックボールの外周に接するローラを介して、トラックボールのX/Y方向の回転移動量を検出するロータリエンコーダに、それぞれクリック機構を設けて、操作者にトラックボールの回転のクリック感を与えている。このようなクリック感を伴うトラックボールの動作をここでは「クリックトラックボール動作」と呼ぶことにする。また、トラックボールにクリックトラックボール動作を行わせる操作者の操作を「クリックトラックボール操作」と呼ぶことにする。尚、特許文献1では、クリック機構の作動、非作動を切換える切換手段をも開示している。
【0009】
また、本発明に関連する先行技術として、回転体(ボール)に対して負荷が与えられている状態で回転体を操作したときに、回転体に与えられた操作力に応じた検出信号を出力できる「コントローラ」が、例えば、特許文献2に開示されている。この特許文献2では、回転体の回転に応じた信号を出力する検出部と、回転体に対して負荷を与える駆動部とを独立にして設けている。
【0010】
更に、本発明に関連する先行技術として、力帰還プロセッサからの力帰還生成と関連するコンピュータ負担を軽減する触覚加速器を含む力帰還インターフェースが、例えば、特許文献3に開示されている。触覚加速器は、インターフェース装置のセンサから受信したユーザ物体の位置を表す生の位置データからユーザ操縦可能物体の動きを記述する速度および/または加速度情報をすばやく決定する。速度および/または加速度データは、力帰還プロセッサによってユーザ物体の出力されるべき力を決定するために使用される。
【0011】
尚、光学式に動きを検出する光学式動き検出手段を備えたポインティング・デバイスは、例えば、特許文献4に開示されている。
【0012】
【特許文献1】
特開平9−282088号公報
【0013】
【特許文献2】
特開2000−214995号公報
【0014】
【特許文献3】
米国特許第5,999,168号明細書
【0015】
【特許文献4】
特開平11−345075号公報
【0016】
【発明が解決しようとする課題】
上述した特許文献1に記載されたトラックボールでは、トラックボールにクリック感を持たせるクリック機構は、機械的なものであり開ループ制御であるので、荷重(負荷)の大きさやクリックピッチは機械的構成によって一意に決定されてしまう。すなわち、トラックボールの移動量に応じて、荷重(負荷)の大きさやクリックピッチを変えることができない。具体的には、図1に図示したようなメニュー選択画面の場合に、特許文献1に開示されたクリック機構では、メニュー選択画面の相隣接する2つのメニューの境目でトラックボールにクリック感を持たせるために、境目に近付くにつれて荷重を徐々に強くし、これを抜けると荷重を弱くする、というような制御を行うことができない。さらに、特許文献1は、上述したように、クリック機構の作動、非作動を切換える切換手段を開示しているものの、その切換えは、操作画面の種類とは無関係に行われる。
【0017】
尚、特許文献2は、回転体(ボール)に対して駆動部から負荷を与えているだけであって、トラックボールにクリック感を持たせることは何ら意図していない。すなわち、特許文献2では、負荷の大きさを回転体(ボール)の移動量に応じて制御すること等は何ら行っていない。換言すれば、特許文献2では、帰還制御を行っていない。
【0018】
特許文献3は、力帰還について開示しているだけであって、トラックボールにクリック感を持たせることについては開示していない。
【0019】
尚、特許文献4は、単に光学式ポインティング・デバイスを開示しているに過ぎない。
【0020】
したがって、本発明の課題は、ボールの操作者に対して相隣接する2つのメニューの境目でクリック感を伝えることができるトラックボールを提供することにある。
【0021】
【課題を解決するための手段】
本発明によれば、メニュー選択画面(30)上に表示された複数のメニューの中から特定の1つのメニューを選択するために用いられるトラックボール(10)であって、ボール(11)と、このボールの移動を検出する移動検出手段(12;18x,18y)と、ボールをX方向に回転させる第1の駆動手段(13x,14x,15x,16x)と、ボールをY方向に回転させる第2の駆動手段(13y,14y,15y,16y)と、移動検出手段で検出されたボールの移動量を示す信号に応答して、ボールの操作者に対して相隣接する2つのメニューの境目でクリック感を伝えるように、さらに前記移動検出手段で検出された前記ボールの移動量を示す信号に応答して、前記ボールの操作者に対して前記メニュー選択画面の前記メニュー間における端の壁で操作者に操作感を伝えるように前記第1および前記第2の駆動手段を制御する制御手段(17)とを有するトラックボール(10)が得られる。
【0022】
尚、上記括弧内の符号は、本発明の理解を容易にするために付したものであり、一例にすぎず、これらに限定されないのは勿論である。
【0023】
【発明の実施の形態】
以下、図面を参照して、本発明の実施の形態について詳細に説明する。
【0024】
図2乃至図4を参照して、本発明の第1の実施の形態に係るトラックボールについて説明する。図2は、トラックボール10とそれに接続されたパーソナル・コンピュータ(PC)20とを示すブロック図である。図3はトラックボール10の概略平面図、図4はトラックボール10の概略正面図である。
【0025】
図示の例では、パーソナル・コンピュータ20がカー・ナビゲーション・システムの場合の例を示している。すなわち、図示の例は、トラックボール10を、カー・ナビゲーション・システムのポインティング・デバイスとして使用している例である。
【0026】
尚、カー・ナビゲーション・システム20は、前述したように、車載コンピュータの地図画面上に現在位置を表示し、目的地へのルートをガイドするシステムである。カー・ナビゲーション・システム20では、上述したように、ディスプレイ画面(操作画面)(図示せず)を地図画面として使用すると共に、メニューを選択するために、ディスプレイ画面(操作画面)をメニュー選択画面としても使用している。
【0027】
操作画面が地図画面の場合、操作者がトラックボール10を操作(回転)することによって、マウスの場合と同様に、地図画面上のポインタ(カーソル)を360度どの方向にも連続的に移動したり、地図画面上に表示されている地図を連続的に移動(シフト)させることができる。すなわち、通常トラックボール操作によってトラックボール10に通常トラックボール動作を行わせることができる。
【0028】
一方、操作画面30が図1に示されるようなメニュー選択画面であるとする。この場合、通常トラックボール操作によってトラックボール10に上述した通常トラックボール動作をさせると、操作者にとってはポインタ(カーソル)の合わせる位置がしぼり難くなる。すなわち、操作画面がメニュー選択画面の場合、通常トラックボール操作をしたのでは、操作者にとって使い勝手のよいものとはいえない状況になる。
【0029】
そこで、本発明に係るトラックボール10では、通常トラックボール操作以外に、操作画面がメニュー選択画面等の場合において、ポインタの位置決めを容易に行うことが可能なクリックトラックボール操作をも行わせるようにしている。すなわち、操作画面が地図画面の場合には通常トラックボール動作を行うようにし、操作画面がメニュー選択画面の場合にはクリックトラックボール動作を行うようにしている。換言すれば、操作画面の種類に応じて、トラックボール10の操作者に対して異なった操作感触を伝えるようにしている。
【0030】
図3および図4に示されるように、トラックボール10は、ボール11を有する。このボール11は、図示しない筐体に全方向に回転自在に保持されている。このボール11の上部は、筐体の上面に形成された円形の開口部(図示せず)から上方へ突出している。
【0031】
トラックボール10は、このボール11の移動を検出する画像センサ12を備えている。この画像センサ12は、図示しない発光ダイオード(LED)から出射されたセンサ用LED光がボール11で反射された反射光を受光することによって、ボール11の移動を検出するものである。尚、この画像センサ12を用いた光学的移動検出手段の詳細な動作説明は、前述した特許文献4等に記載されているので、それを参照されたい。したがって、図示のトラックボール10は、光学式移動検出手段12を備えた光学式トラックボールである。
【0032】
ボール11の外周には、直交する半径に対して直角の方向(Y方向、X方向)にそれぞれ延在するX軸回転軸13x、Y軸回転軸13yを有するX軸トルク伝達ローラ14x、Y軸トルク伝達ローラ14yが当接している。X軸回転軸13xの一端にはX軸用DCモータ15xが設けられており、Y軸回転軸13yの一端にはY軸用DCモータ15yが設けられている。
【0033】
図2に示されように、X軸用DCモータ15xはX軸モータドライバ16xによって駆動され、Y軸用DCモータ15yはY軸モータドライバ16yによって駆動される。画像センサ12によって検出されたボール11の移動量を示す信号は制御部17へ送られる。制御部17は、例えば、マイクロコンピュータによって実現され得る。このボール11の移動量を示す信号に応答して、制御部17は、後述するように、X軸モータドライバ16xおよびY軸モータドライバ16yへそれぞれX軸モータ駆動指令およびY軸モータ駆動指令を送出して、X軸用DCモータ15xおよびY軸用DCモータ15yの駆動を制御する。
【0034】
とにかく、X軸回転軸13x、X軸トルク伝達用ローラ14x、X軸用DCモータ15x、およびX軸モータドライバ16xの組み合わせは、ボール11をX方向に回転させる第1の駆動手段として動作する。同様に、Y軸回転軸13y、Y軸トルク伝達用ローラ14y、Y軸用DCモータ15y、およびY軸モータドライバ16yの組み合わせは、ボール11をY方向に回転させる第2の駆動手段として動作する。
【0035】
制御部17は、後述するように、操作画面の種類に応じて、第1および第2の駆動手段を制御して、ボール11の操作者に対して異なった操作感触を伝える。
【0036】
次に、図1乃至図4を参照して、制御部17における具体的な動作例について説明する。カー・ナビゲーション・システム20は、ディスプレイ画面(操作画面)30を有する。この操作画面30は、地図を表示する地図画面と、図1に図示されるような、メニューを選択するためのメニュー選択画面との間で切換えが可能である。現在の操作画面30の種類を示す画面情報は、カー・ナビゲーション・システム20から制御部17へ送出される。
【0037】
画面情報が、現在の操作画面30が地図画面であることを示しているとする。この場合、制御部17は、通常トラックボール動作を行うように、第1および第2の駆動手段を制御する。詳述すると、制御部17は、X軸モータドライバ16xおよびY軸モータドライバ16yへそれぞれX軸モータ駆動指令およびY軸モータ駆動指令を送出しない。換言すると、通常トラックボール動作では、制御部17は、第1および第2の駆動手段を何ら制御しない。その結果、操作者は自由に(何ら違和感なく)ボール11を全方向に回転することができる。
【0038】
一方、画面情報が、現在の操作画面30が図1に示されるようなメニュー選択画面であることを示しているとする。この場合、制御部17は、クリックトラックボール動作を行うように、第1および第2の駆動手段を制御する。詳述すると、図1に示すメニュー選択画面は、3×3=9個の桝目(メニュー)を持ち、ポインタとしてのコマがこれら9個の桝目を移動してその中の1つを選択する。各桝目(メニュー)は特定のラジオ局を指している。制御部17は、画像センサ12からのボール11の移動量を示す信号に応答して、メニュー選択画面の相隣り合う2つの桝目(メニュー)の境目でトラックボール10にクリック感を持たせるために、桝目の境目に近付くにつれて荷重を徐々に強くし、これを抜けると荷重を弱くするというように、第1および第2の駆動手段を制御する。これにより、ボール11の操作者に対して、マウスのホイール操作のようなクリック感を伝えることが可能となる。したがって、コマの行き過ぎや、操作性の悪さを解消することができる。
【0039】
次に、クリックトラックボール動作について具体例を挙げて更に詳細に説明する。
【0040】
ここでは、操作画面30が、図5に示されるようなメニュー選択画面である場合を例にとって説明する。すなわち、図5に図示したメニュー選択画面30は、5行、5列の計25個の桝目(メニュー)を持つ。ここでは、一番上の行から最下行をそれぞれ第1乃至第5行と呼び、一番右側の列から一番左側の列をそれぞれ第1乃至第5行と呼ぶことにする。したがって、第3行が中央行であり、第3列が中央列である。第1列では、第1行から第5行がそれぞれ「あ」、「い」、「う」、「え」、および「お」である。第2列では、第1行から第5行がそれぞれ「か」、「き」、「く」、「け」、および「こ」である。第3列、すなわち、中央列では、第1行から第5行がそれぞれ「さ」、「し」、「す」、「せ」、および「そ」である。第4列では、第1行から第5行がそれぞれ「た」、「ち」、「つ」、「て」、および「と」である。第5行では、第1行から第5行がそれぞれ「な」、「に」、「ぬ」、「ね」、「の」である。
【0041】
ポインタ(カーソル)がメニュー選択画面30の中央列(第3列)の中央にあるとき、X軸のカウント値(累積値)が0であり、それよりポインタが右側へ移動すると正にカウントされ、左側へ移動すると負にカウントされる。同様に、ポインタ(カーソル)がメニュー選択画面30の中央行(第3行)の中央にあるとき、Y軸のカウント値(累積値)が0であり、それよりポインタが上側へ移動すると正にカウントされ、下側へ移動すると負にカウントされる。
【0042】
メニュー選択画面30において、中央列(第3列)は、X軸のカウント値(累積値)が−31から31の範囲内にあり、第2列は、X軸のカウント値(累積値)が32から94の範囲内にあり、第1列は、X軸のカウント値(累積値)が95から157の範囲内にあり、第4列は、X軸のカウント値(累積値)が−32から−94の範囲内にあり、第5列は、X軸のカウント値(累積値)が−95から−157の範囲内にある。
【0043】
同様に、メニュー選択画面30において、中央行(第3行)は、Y軸のカウント値(累積値)が−31から31の範囲内にあり、第2行は、Y軸のカウント値(累積値)が32から94の範囲内にあり、第1行は、Y軸のカウント値(累積値)が95から157の範囲内にあり、第4行は、Y軸のカウント値(累積値)が−32から−94の範囲内にあり、第5行は、Y軸のカウント値(累積値)が−95から−157の範囲内にある。
【0044】
したがって、たとえば、ポインタ(カーソル)が、メニュー選択画面30上のX軸のカウント値(累積値)が−31から31の範囲にあって、Y軸のカウント値(累積値)が−31から31の範囲にあるとき、中央列(第3列)で、中央行(第3行)である「す」を選択している。
【0045】
制御部17は、図6に示されるような、ボール11の移動量に応じたX軸用DCモータ15xに対するトルク量を示すX軸トルクテーブル40xを有する。図6に示されるように、このX軸トルクテーブル40xには、ポインタがメニュー選択画面30における各メニューの中心にあるときは零で、それよりポインタがX軸に沿って移動してメニューの境目へ近付くにつれてその中心へ戻すように徐々に強くなるようなトルク量が記載されている。
【0046】
同様に、図示はしないが、制御部17は、ボール11の移動量に応じたY軸用DCモータ15yに対するトルク量を示すY軸トルクテーブルを有する。このY軸トルクテーブルには、ポインタがメニュー選択画面30における各メニューの中心にあるときは零で、それよりポインタがY軸に沿って移動してメニューの境目へ近付くにつれてその中心へ戻すように徐々に強くなるようなトルク量が記載されている。
【0047】
図6に図示されたX軸トルクテーブル40xについて更に詳述する。X軸用DCモータ15xは、パルス幅変調(PWM)されたDC電圧で駆動され、その衝撃係数(duty)を変えることによって、X軸用DCモータ15xに対するトルク量を変えることができる。すなわち、衝撃係数が大きいほど、トルク量も大きくなる。
【0048】
図6のX軸トルクテーブル40xにおいて、最上欄にはX軸の累積値(カウント値)を示し、最左蘭にはY軸の累積値(カウント値)を示している。X軸トルクテーブル40xは、X軸の累積値およびY軸の累積値に対する衝撃係数を示している。尚、負の衝撃係数は、X軸用DCモータ15xに印加されるDC電圧の極性が負であることを示している。尚、制御部17は、図示しないX軸カウンタおよびY軸カウンタを備えている。X軸カウンタはX軸の累積値(カウント値)を保持し、Y軸カウンタはY軸の累積値(カウント値)を保持している。
【0049】
尚、Y軸トルクテーブルは、図6に図示されたX軸トルクテーブル40xにおいて、最上欄におけるX軸の累積値をY軸の累積値に変更し、最左蘭におけるY軸の累積値をX軸の累積値に変更したものである。
【0050】
次に、図6に加えて図7をも参照して、具体例を挙げて説明する。図7は、図6に示すX軸トルクテーブル40xの衝撃係数とモータ印加電圧(トルク)との関係を図示している。図7において、横軸はX軸のカウント値を、縦軸はモータ印加電圧(正回転トルク、負回転トルク)を示している。衝撃係数が正でその値が大きくなればなるほど、正回転トルクが大きくなる。また、衝撃係数が負でその値が大きければなるほど、負回転トルクが大きくなる。ここで、正回転トルクとは、ボール11をX軸の正方向(図5における右側の方向)へ移動させようとするトルクをいい、負回転トルクとは、ボール11をX軸の負方向(図5における左側の方向)へ移動させようとするトルクをいう。
【0051】
尚、X軸のカウント値xおよびY軸のカウント値yを座標(x,y)で表すことにする。
【0052】
Y軸の累積値(カウント値)が0の状態において、X軸の累積値(カウント値)を0から変化させたとする。すなわち、ポインタ(カーソル)の初期位置が、メニュー選択画面30の中央にあるメニュー「す」の中心(0,0)にあって、その初期位置(0,0)から、操作者がボール11をX方向へ回転させるように操作したとする。
【0053】
たとえば、図5に示すメニュー選択画面30において、ポインタをメニュー「す」からその右隣のメニュー「く」の方向へ移動させるために、操作者がボール11をX軸の正方向へ回転させたとする。このとき、画像センサ12によってボール11がX軸の正方向へ回転したことが検出され、その移動量を示す信号が制御部17へ送られる。この移動量を示す信号に応答して、制御部17は累積移動値を算出し、それをX軸のカウント値(累積値)としてX軸カウンタに保持する。このX軸のカウント値(累積値)に基づいて、制御部17は、X軸トルクテーブル40xを参照して、衝撃係数を求める。本例の場合、操作者がボール11をX軸の正方向へ回転しているので、衝撃係数は負である。したがって、制御部17は、この負の衝撃係数を示すX軸モータ駆動指令をX軸モータドライバ16xへ送出して、X軸用DCモータ15xに負回転トルクを与える。すなわち、メニュー選択画面30のメニュー「す」の中心(0,0)へ戻すような負荷をボール11に対して与える。
【0054】
詳述すると、操作者がボール11を手操作によってX軸の正方向へ回転させた場合には、座標(31,0)になるまで、制御部17は、X軸用DCモータ15xへX軸モータドライバ16xを介して加えるPWMの衝撃係数をX軸のカウント値とともに大きくしていく制御を行う。この時、X軸用DCモータ15xには、ボール11を手操作によって回転する方向とは逆方向に回転させる負回転トルクが働いている。すなわち、操作者には、その手操作感が徐々に重く感じられていく。
【0055】
メニュー「す」と「く」との間の境目を越えて座標(32,0)になった時点で、制御部17は、X軸用DCモータ15xの回転方向が、手操作によるボール11の回転方向と同じ方向になるように、回転トルクを負回転トルクから正回転トルクに切換える。そして、座標(63,0)になるまで、制御部17は、X軸用DCモータ15xへX軸モータドライバ16xを介して加えるPWMの衝撃係数をX軸のカウント値とともに小さくしていく制御を行う。このように、操作者の手操作の回転方向と同じ方向にX軸用DCモータ15xを回転することにより、操作者には手操作感が一気に軽くなったように感じられる。
【0056】
このように相隣接する2つのメニュー(上記の例では、メニュー「す」とメニュー「く」)の境目で、回転トルクの方向を切換えるので、操作者にはクリック感が伝えられる。
【0057】
この時、制御部17は、Y軸用DCモータ15yに対してもY軸の方向へ、Y軸トルクテーブルに基づいて、X軸のカウント値およびY軸のカウント値に応じた回転トルクを発生させている。すなわち、操作者がボール11をX軸の方向へ回転させるように操作しようとした場合でも、実際には操作者は必ずしもX軸の方向ばかりでなく、Y軸の方向へも多少回転させるような力をボール11に対して与えてしまうだろう。このような場合でも、制御部17は、常にボール11に対してY座標が0となるような方向へ戻るような回転トルクを、Y軸用DCモータ15yに発生させる。したがって、操作者がボール11をX軸の方向へ回転させようと操作するときに発生する、ボール11のY軸の方向へのブレを抑えることができる。
【0058】
以上では、図5に示すメニュー選択画面30において、ポインタをメニュー「す」からその右隣のメニュー「く」の方向へ移動させるために、操作者がボール11をX軸の正方向へ回転させた場合について述べたが、図5に示すメニュー選択画面30において、ポインタをメニュー「す」からその左隣のメニュー「く」の方向へ移動させるために、操作者がボール11をX軸の負方向へ回転させる場合も同様である。
【0059】
この場合には、画像センサ12によってボール11がX軸の負方向へ回転したことが検出され、その移動量を示す信号が制御部17へ送られる。この移動量を示す信号に応答して、制御部17は累積移動値を算出し、それをX軸のカウント値(累積値)としてX軸カウンタに保持する。このX軸のカウント値(累積値)に基づいて、制御部17は、X軸トルクテーブル40xを参照して、衝撃係数を求める。本例の場合、操作者がボール11をX軸の負方向へ回転しているので、衝撃係数は正である。したがって、制御部17は、この正の衝撃係数を示すX軸モータ駆動指令をX軸モータドライバ16xへ送出して、X軸用DCモータ15xに正回転トルクを与える。すなわち、メニュー選択画面30のメニュー「す」の中心(0,0)へ戻すような負荷をボール11に対して与える。
【0060】
詳述すると、操作者がボール11を手操作によってX軸の負方向へ回転させた場合には、座標(−31,0)になるまで、制御部17は、X軸用DCモータ15xへX軸モータドライバ16xを介して加えるPWMの衝撃係数をX軸のカウント値とともに大きくしていく制御を行う。この時、X軸用DCモータ15xには、ボール11を手操作によって回転する方向とは逆方向に回転させる正回転トルクが働いている。すなわち、操作者には、その手操作感が徐々に重く感じられていく。
【0061】
メニュー「す」と「つ」との間の境目を越えて座標(−32,0)になった時点で、制御部17は、X軸用DCモータ15xの回転方向が、手操作によるボール11の回転方向と同じ方向になるように、回転トルクを正回転トルクから負回転トルクに切換える。そして、座標(−63,0)になるまで、制御部17は、X軸用DCモータ15xへX軸モータドライバ16xを介して加えるPWMの衝撃係数をX軸のカウント値とともに小さくしていく制御を行う。このように、操作者の手操作の回転方向と同じ方向にX軸用DCモータ15xを回転することにより、操作者には手操作感が一気に軽くなったように感じられる。
【0062】
このように相隣接する2つのメニュー(上記の例では、メニュー「す」とメニュー「つ」)の境目で、回転トルクの方向を切換えるので、操作者にはクリック感が伝えられる。
【0063】
上述したように、座標(−31,0)から座標(31,0)までの区間を、メニュー選択画面30上のメニュー「す」の1区間として定義することにより、メニュー「す」の境目(切り替わり付近)で、ボール11の操作者に対して最大トルク(負荷)を発生させ、かつ、回転トルクの方向を切換えている。これにより、現在のメニュー「す」から次のメニュー「く」または「つ」へのクリック感を操作者に対して伝えることができる。そして、上記最大トルクはメニュー切り替わりの軽い障壁として働く。また、操作者がボール11に対する操作を止めたとき(荷重を抜いたとき)は、メニュー選択画面30上のポインタを常に各メニューの中心へ戻すような回転トルクを、制御部17はX軸用DCモータ15xおよびY軸用DCモータ15yに対して発生している。
【0064】
尚、以上では、メニュー選択画面30の初期位置(0,0)から、操作者がボール11をX方向へ回転するように操作した場合の動作について説明したが、メニュー選択画面30の初期位置(0,0)から、操作者がボール11をY方向へ回転するように操作した場合も同様の動作をすることは明らかである。すなわち、この場合も、制御部17は、Y軸のカウント値およびX軸のカウント値に応じた回転トルクを、Y軸用DCモータ15yおよびX軸用DCモータ15xに発生させることで、ボール11をX軸方向へ操作したときと同様の操作感を、操作者に対して伝えることができる。
【0065】
次に、図8を参照して、本発明に係るトラックボールのクリック制御について説明する。先ず、制御部17は、PC(カー・ナビゲーション・システム)20との間で通信を行い、ポートの設定を確認する(ステップS1)。画像センサ12は、ボール11の相対移動量を検出する(ステップS2)。制御部17は、画像センサ12で検出されたボール11の相対移動量から、ボール11の累積移動量を算出する(ステップS3)。制御部17は、累積移動量に応じたパラメータ(PWMの衝撃係数)をテーブル(X軸トルクテーブル40x、Y軸トルクテーブル)より読み取る(ステップS4)。
【0066】
引続いて、制御部17は、テーブルからの読みとり値を相対移動値、およびその他要素により加工する(ステップS5)。制御部17は、PC(カー・ナビゲーション・システム)20へ移動量を出力する(ステップS6)。制御部17は、X軸用DCモータ15xおよびY軸用DCモータ15yへ、X軸モータドライバ16xおよびY軸モータドライバ16yを介して、PWM信号とモータ方向制御信号を送出する(ステップS7)。
【0067】
ところで、トラックボール10のクリック制御では、図5に示したメニュー選択画面30の五十音によるメニュー選択画面30を例とすると、ボール11をX軸の右方向に操作して、メニュー選択画面30上のメニュー「す」、メニュー「く」、メニュー「う」と操作していくと、メニュー「う」でメニュー選択画面30の端に到達する。
【0068】
この際、メニュー選択画面30上においてメニュー「う」のさらに右方向にはメニュー選択画面30が存在しないため、この先へのボール11の回転操作は不要となる。そこで、メニュー選択画面30の端では、壁を検出して制御部17によって制御することにより通常より大きなトルク量でメニュー選択画面30内へ引き戻す働きをさせたり、変動(振動)によりメニュー選択画面30の端を操作者に操作感(クリック感)で認識させるようにしている。
【0069】
図9は、Y軸カウント値=0のときのX軸カウント値とトルク、メニューの関係を示している。図9を参照して、メニュー選択画面30において、メニュー「く」は、X軸のカウント値(累積値)が32から94の範囲内にあり、メニュー「う」は、X軸のカウント値(累積値)が95から157を通り越した区間を含む範囲内にある。カウント値(累積値)の157は、画面上の壁の位置であり、157は、パーソナル・コンピュータ(カー・ナビゲーション・システム)や制御機器が認識している座標である。
【0070】
操作者に壁を認識させるためには、移動距離がメニュー選択画面30から外へいくことがないように、X軸用DCモータ15xのトルク量を大きくしていく。具体例として、図9の場合には、メニュー「う」の文字の中央よりも右方向にずれた場合は、通常のトルクよりも大きな力でボール11をメニュー「う」の中央に戻す働きをさせる。メニュー選択画面30を越えた領域は、領域内に戻すようにトルクを加え続ける。
【0071】
また、メニュー「う」の壁の付近では、大きなトルクによりスリップが発生する可能性が高くなるため、スリップ検出を行う。これらの操作により、ボール11の操作者は、メニュー選択画面30の隅で大きな反発力を受けたり、スリップ制御によって空転している感触を受ける。
【0072】
なお、スリップ制御は壁以外でも行っている。スリップ制御を行わないと、ボールとローラーの摩擦力が低下したとき(油、水等により)ボール11を戻そうとするモータの回転トルクによりローラーが空転してしまう。また、メニューの切り替わり付近が最もトルクが大きくなるので、空転のスピードも速くなり、不快感をより多く感じる。そこで、スリップ制御を行ってボールとローラーがスリップしない(実際には少量のスリップ)程度までモーターのトルクを弱める制御を行っている。
【0073】
ボール11とローラの摩擦が小さい状態で壁の位置に来た場合、スリップ制御が無いと、より速い回転でローラーが空転するが、スリップ制御があるとスリップしない状態までモータのトルクを落とすため、ローラは殆どスリップしない。壁を操作者に伝えるトルクの変化もボール11とローラの摩擦力が下がるにつれて、小さくなり、通常のクリックとの違いは無くなっていく。しかし、通常の摩擦状態であれば、クリック状態より大きい反発を受ける。一方振動による壁の認識であれば、ボール11とローラの摩擦が小さくなっても、壁を認識させることはできる。従って、スリップし易い状態では、クリック感も弱くなるし、壁と通常のクリックのトルク差が無くなり、より不快な空転は無くなる。
【0074】
また、移動距離がメニュー選択画面30から外へいかないように、X軸用DCモータ15xのトルクを変動(振動)させ、操作者に壁の端を認識させる。具体例として、図9の場合には、メニュー「う」の文字の中央より、右にずれた場合は、通常のトルクでボール11をメニュー「う」の中央に戻す働きをさせる。メニュー選択画面30を越えた領域は、変動(振動)によりトルク量を変動させ壁を認識させる。このように、X軸、Y軸の全ての方向に同様の壁を発生させる。
【0075】
尚、メニュー選択画面30の角隅の部分については、X軸の壁と、Y軸の壁とを同時に作ることによって、角隅を認識させることが可能である。
【0076】
図10では、軽い壁を設ける例を示している。図10を参照して、メニュー選択画面30において、メニュー「A」〜「E」の文字は、X軸のカウント値(累積値)が−32から−92の範囲内にあり、メニュー「あ」〜「お」の文字は、X軸のカウント値(累積値)が31から−31の範囲内にあり、メニュー「1」〜「5」の数字は、X軸のカウント値(累積値)が32から94の範囲内にある。
【0077】
同様に、メニュー選択画面30において、メニュー「A」〜「E」の文字、メニュー「あ」〜「お」の文字、メニュー「1」〜「5」の数字は、Y軸のカウント値(累積値)が初期値(0,0)から157に、初期値(0,0)からから−157の範囲内にある。
【0078】
図10に示すように、異なる種類のメニューが同一メニュー選択画面30にある場合、メニュー「A」〜「E」、「あ」〜「お」、「1」〜「5」のような同一種間は移動しやすく、他種メニュー、例えば、「A」〜「E」から「あ」〜「お」へは移動しにくい設定にすることにより操作感を得る。
【0079】
図11は、具体例として、メニュー選択画面30のアルファベット、ひらがな、数字間に壁を設けた例を示している。図11に示すX軸設定において、図10に示したメニュー「C」、メニュー「う」、メニュー「3」では、図12に示すY軸設定におけるY軸相当のトルク量に対して、別種の文字、数字間に通常よりも大きい壁を設けている。
【0080】
図13は、本発明に係るトラックボールのクリック制御における壁検出を説明するためのフローチャートである。図13を参照して、本発明に係るトラックボール10のクリック制御における壁検出について説明する。
【0081】
先ず、図8において説明したように、制御部17は、画像センサ12で検出されたボール11の相対移動量から、ボール11の累積移動量を算出する(ステップS3)。次に、壁を検出しているか否かを判定する(ステップS11)。壁を検出していれば、壁までの累積値に達している否かを判定する(ステップS12)。壁までの累積値に達している場合には、壁用トルク値設定・モータ極性設定を行う(ステップS13)。そして、図8において説明したように、制御部17は、PC(カー・ナビゲーション・システム)20との間で通信を行い、ポートの設定を確認する(ステップS1)。
【0082】
また、ステップS11において、壁を検出していれば、図8のステップ4において説明したように、制御部17は、累積移動量に応じたパラメータ(PWMの衝撃係数)をテーブル(X軸トルクテーブル40x、Y軸トルクテーブル)より読み取る。
【0083】
さらに、ステップS12において、壁までの累積値に達していない場合には、図8のステップ4において説明したように、制御部17は、累積移動量に応じたパラメータ(PWMの衝撃係数)をテーブル(X軸トルクテーブル40x、Y軸トルクテーブル)より読み取る。
【0084】
また、上述した実施の形態では、ボール11の移動を検出する移動検出手段として、図9に示されるような、画像センサ12を使用した光学式移動検出手段を用いているが、その代わりに、図10に示されるような、機械式移動検出手段を用いてもよい。
【0085】
図10に示された機械式移動検出手段は、X軸回転軸13xに設けられたX軸モータ用ロータリエンコーダ18xと、Y軸回転軸13yに設けられたY軸モータ用ロータリエンコーダ18yとを有する。X軸モータ用ロータリエンコーダ18xで検出されたX方向の移動量を示す信号およびY軸モータ用ロータリエンコーダ18yで検出されたY方向の移動量を示す信号は、制御部17(図2)へ送られる。
【0086】
図16は、トルクテーブルと同様の値を計算によりトルク量を算出する方法を示している。この計算方法では、1メニュー区間が63の時、Xのクリック力は、
(1)Xの累積移動値を63で割った時の余りが0の時、トルクT=0
(2)Xの累積移動値を53で割った時の余りが1〜31(xとする)の時、トルクT=x+19
(3)Xの累積移動値を63で割った時の余りが32〜62(xとする)の時、トルクT=−(63−x)−19
上記(1)から(3)により、トルクテーブルと同様の値が算出できる。
【0087】
以上、本発明について好ましい実施の形態によって例を挙げて説明してきたが、本発明は上述した実施の形態に限定しないのは勿論である。例えば、上述した実施例では、トラックボールを、カー・ナビゲーション・システムに用いられる車載用ポインティング・デバイスとして用いる場合を例に挙げて説明しているが、観光地、市役所、郵便局等のあらゆる公共機関の場所に設けられるコンピュータのメニュー選択画面を選択するためにも使用することができる。また、カー・ナビゲーション・システム以外の他のパーソナル・コンピュータ上でも使用することができる。
【0088】
【発明の効果】
以上の説明から明らかなように、本発明では、移動検出手段で検出されたボールの移動量を示す信号に応答して、第1および第2の駆動手段を制御することによって、ボールの操作者に対して相隣接する2つのメニューの境目でクリック感を伝えることができる。
【図面の簡単な説明】
【図1】メニュー選択画面の一例を示す図である。
【図2】本発明の一実施の形態に係るトラックボールを、パーソナル・コンピュータ(カー・ナビゲーション・システム)と共に示すブロック図である。
【図3】図2に図示したトラックボールの概略平面図である。
【図4】図2に図示したトラックボールの概略正面図である。
【図5】図2に図示したトラックボールの動作を説明するためのメニュー選択画面の一例を示す図である。
【図6】図2に図示したトラックボールの制御部に含まれるX軸トルクテーブルの一例を示す図である。
【図7】図6に示すX軸トルクテーブルの衝撃係数とモータ印加電圧(トルク)との関係を示す図である。
【図8】本発明に係るトラックボールのクリック制御を説明するためのフローチャートである。
【図9】図6に示すX軸トルクテーブルの衝撃係数とモータ印加電圧(トルク)との関係において、Y軸カウント値=0のときのX軸カウント値とトルク、メニューの関係を示す図である。
【図10】図2に図示したトラックボールの動作を説明するためのメニュー選択画面の一例を示す図である。
【図11】図9に示したX軸カウント値とトルク、メニューの関係において、X軸設定におけるメニュー選択画面のメニュー間に障壁を設けた例を示す図である。
【図12】図11に示したX軸設定において、Y軸設定におけるメニュー選択画面のメニュー間に障壁を設けた例を示す図である。
【図13】本発明に係るトラックボールのクリック制御における壁検出を説明するためのフローチャートである。
【図14】図2に図示したトラックボールに使用される光学式移動検出手段の概略正面図である。
【図15】本発明の他の実施の形態に係るトラックボールに使用される機械式移動検出手段の概略平面図である。
【図16】トルクテーブルと同様の値を計算により算出する方法を説明するための図である。
【符号の説明】
10 トラックボール
11 ボール
12 画像センサ(光学式移動検出手段)
13x X軸回転軸
13y Y軸回転軸
14x X軸トルク伝達用ローラ
14y Y軸トルク伝達用ローラ
15x X軸用DCモータ
15y Y軸用DCモータ
16x X軸モータドライバ
16y Y軸モータドライバ
17 制御部
18x X軸モータ用ロータリエンコーダ
18y Y軸モータ用ロータリエンコーダ
20 PC(カー・ナビゲーション・システム)
30 操作画面(メニュー選択画面)
40x X軸トルクテーブル
Claims (11)
- メニュー選択画面上に表示された複数のメニューの中から特定の1つのメニューを選択するために用いられるトラックボールであって、
ボールと、
該ボールの移動を検出する移動検出手段と、
前記ボールをX軸方向に回転させる第1の駆動手段と、
前記ボールをY軸方向に回転させる第2の駆動手段と、
前記移動検出手段で検出された前記ボールの移動量を示す信号に応答して、前記ボールの操作者に対して相隣接する2つのメニューの境目でクリック感を伝えるように、さらに
前記移動検出手段で検出された前記ボールの移動量を示す信号に応答して、前記ボールの操作者に対して前記メニュー選択画面の前記メニュー間における端の壁で操作者に操作感を伝えるように前記第1および前記第2の駆動手段を制御する制御手段と、
を有するトラックボール。 - 前記制御手段は、前記壁で前記メニュー選択画面内へ引き戻す働きや変動させるよう制御するものであることを特徴する請求項1に記載のトラックボール。
- 前記制御手段は、前記ボールの移動量に応じた前記第1および前記第2の駆動手段に対するトルク量を示すトルクテーブルを備え、前記制御手段は、前記トルクテーブルを参照して前記第1の駆動手段、および前記第2の駆動手段のトルクを制御することを特徴とする請求項1に記載のトラックボール。
- 前記制御手段は、前記ボールの移動量に応じた前記第1および前記第2の駆動手段に対するトルク量を計算式により算出し、前記制御手段は、前記前記計算式を参照して前記第1の駆動手段、および前記第2の駆動手段のトルクを制御することを特徴とする請求項1に記載のトラックボール。
- 前記トルクテーブルには、各メニューの中心にあるときは零で、それよりポインタが前記メニューの境目へ近付くにつれてその中心へ戻すように徐々に強くなるようなトルク量が記載されていることを特徴とする請求項3又は4に記載のトラックボール。
- 前記制御手段は、スリップ制御を行って前記ボールがスリップしない程度まで前記第1及び第2の駆動手段の前記トルク量を弱める制御を行うことを特徴とする請求項1に記載のトラックボール。
- 前記制御手段は、前記メニューの中央より、ずれた場合に通常の前記トルクで前記ボールを前記メニューの中央に戻す働きを有することを特徴とする請求項1に記載のトラックボール。
- 前記制御手段は、前記メニュー選択画面の角隅の部分で前記X軸方向の前記壁と、前記Y軸方向の前記壁とを同時に作ることによって、前記角隅を認識させることを特徴とする請求項1に記載のトラックボール。
- 前記制御手段は、異なる種類の前記メニューが同一の前記メニュー選択画面にある場合に、前記メニューの同一種間は移動しやすく、他種の前記メニュー間へは移動しにくい設定にすることにより操作感を得ることをことを特徴とする請求項1に記載のトラックボール。
- 前記移動検出手段が光学式移動検出手段である、請求項1に記載のトラックボール。
- 前記移動検出手段が機械式移動検出手段である、請求項1に記載のトラックボール。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003054662A JP2004265134A (ja) | 2003-02-28 | 2003-02-28 | トラックボール |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003054662A JP2004265134A (ja) | 2003-02-28 | 2003-02-28 | トラックボール |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004265134A true JP2004265134A (ja) | 2004-09-24 |
Family
ID=33118939
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003054662A Withdrawn JP2004265134A (ja) | 2003-02-28 | 2003-02-28 | トラックボール |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004265134A (ja) |
-
2003
- 2003-02-28 JP JP2003054662A patent/JP2004265134A/ja not_active Withdrawn
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9218059B2 (en) | Input apparatus for vehicle | |
| JP4642497B2 (ja) | ナビゲーション装置 | |
| AU2004215108B2 (en) | Navigation device with touch screen | |
| JP4966764B2 (ja) | タッチパネル表示装置およびタッチパネル制御方法 | |
| RU2636674C2 (ru) | Контроллер для отображения карты | |
| CN102105322B (zh) | 用于在机动车中在显示器上显示双侧平面对象的方法以及用于机动车的显示设备 | |
| JP2012256147A (ja) | 表示入力装置 | |
| JP5023953B2 (ja) | 車載表示制御装置、車載表示制御方法および車載表示制御プログラム | |
| JP4264029B2 (ja) | 力覚付与型入力装置 | |
| US7688313B2 (en) | Touch-sense apparatus available for one-dimensional and two-dimensional modes and control method therefor | |
| US20200233570A1 (en) | Display control device, display control method, non-transitory computer-readable recording medium, and electronic device | |
| JP2004265134A (ja) | トラックボール | |
| JP2004264939A (ja) | トラックボール | |
| JP2004272630A (ja) | トラックボール | |
| JP2004287903A (ja) | トラックボール | |
| JP2004265119A (ja) | トラックボール | |
| JP2004272617A (ja) | トラックボール | |
| EP1530120A1 (en) | Force-feedback input device | |
| JP2004264935A (ja) | トラックボール | |
| KR20170034535A (ko) | 스티어링 휠 및 그 동작 방법 | |
| JP4793133B2 (ja) | 入力装置 | |
| JP2000029382A (ja) | 地図表示装置、地図表示方法および地図表示プログラムの記録媒体 | |
| EP4365030A1 (en) | Display device for vehicles and display method for vehicles | |
| JP4384865B2 (ja) | トラックボール | |
| JP2004272625A (ja) | トラックボール |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050726 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20070425 |