JP2004284530A - 自動駐車装置 - Google Patents
自動駐車装置 Download PDFInfo
- Publication number
- JP2004284530A JP2004284530A JP2003081090A JP2003081090A JP2004284530A JP 2004284530 A JP2004284530 A JP 2004284530A JP 2003081090 A JP2003081090 A JP 2003081090A JP 2003081090 A JP2003081090 A JP 2003081090A JP 2004284530 A JP2004284530 A JP 2004284530A
- Authority
- JP
- Japan
- Prior art keywords
- parking
- vehicle speed
- rim
- control
- accelerator opening
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Power Steering Mechanism (AREA)
Abstract
【解決手段】車両を目標駐車位置まで自動的に導く駐車支援制御を実行する自動駐車装置において、検出した車速とアクセル開度との関係に基づいて、駐車支援制御の中断の必要性を判断することを特徴とする。
【選択図】 図3
Description
【発明の属する技術分野】
本発明は、車両を目標駐車位置まで自動的に導く駐車支援制御を実行する自動駐車装置に関する。
【0002】
【従来の技術】
一般的に、車両を目標駐車位置まで自動的に導く駐車支援システムにおいては、自動変速機を備えた車両のクリープ力を利用して車両を後退させつつ、車輪を所定の転舵角で自動的に転舵させる自動駐車制御が行われている。このような駐車支援システムにおいて、ドライバーがブレーキペダルを操作している場合に限り、自動駐車制御を継続する技術が知られている(例えば、特許文献1参照)。この従来技術によれば、ドライバーは自動駐車制御中にブレーキペダルを操作しているため、自動駐車制御中に障害物を発見した際にドライバーは即座にブレーキペダルにより車両を停止させることができる。
【0003】
【特許文献1】
特開平10−114272号公報
【0004】
【発明が解決しようとする課題】
しかしながら、実際に自動駐車制御が行われる状況としては、傾斜のある上り坂上の目標駐車位置まで車両を後退させる状況が想定される。この場合、クリープ力だけでは車両が移動しないため、ドライバーによるアクセルペダルの操作が必要とされる。従って、上述の従来技術のようにブレーキペダルの操作が中止された際に自動駐車制御が中断される構成では、アクセルペダルの操作を必要とする自動駐車制御が成立しないという不都合が生ずる。
【0005】
一方、自動駐車制御中にアクセルペダルの操作を許容する場合、車両が比較的高い速度で後退する可能性が高くなるため、適切な自動駐車制御の中断条件を設定する必要がある。この場合、自動駐車制御の中断条件として、自動駐車制御の中断の際に車両が即座に停止しないことを考慮した許容可能な最大の車速を閾値として設定することが考えられる。しかしながら、この場合の閾値は、アクセルペダルの踏み込み動作から車速が増加するまでの時間の遅れや、アクセルペダル操作の有無によって生ずるブレーキ操作までの時間の差異を考慮すると、比較的低い値に設定せざるを得ず、自動駐車制御の中断条件として理想的な条件とは言い難い。
【0006】
そこで、本発明は、運転者によるアクセルペダルの操作を許容しつつ、自動駐車制御をより適切な段階で中断させることができる、自動駐車装置の提供を目的とする。
【0007】
【課題を解決するための手段】
上記目的は、請求項1に記載する如く、車両を目標駐車位置まで自動的に導く駐車支援制御を実行する自動駐車装置において、
検出した車速とアクセル開度との関係に基づいて、駐車支援制御の中断の必要性を判断することを特徴とする、自動駐車装置により達成される。
【0008】
本発明によれば、車速の検出値とアクセル開度の検出値との関係に基づいて駐車支援制御の中断の必要性を判断することで、アクセルペダルの踏み込み動作から実際に車速が増加するまでの時間の遅れを考慮して、車速が駐車支援制御を中断すべき高い値に達する前に未然に自動駐車制御を中断させることが可能となる。従って、本発明によれば、アクセルペダルの踏み込みを許容しつつ、車速の増加に対する応答性を高めることで、駐車支援制御の有用性及び安全性が向上する。
【0009】
また、上記目的は、請求項2に記載する如く、車速が比較的低いときには、比較的大きいアクセル開度まで駐車支援制御の中断を実行しない一方、車速が比較的高いときには、比較的小さいアクセル開度で中断を実行する自動駐車装置により、又は、
請求項3に記載する如く、アクセル開度が比較的小さいときには、車速が比較的高い値に達するまで駐車支援制御の中断を実行しない一方、アクセル開度が比較的大きいときには、車速が比較的低い値に達した場合に、つまり車速が比較的低い値の段階で駐車支援制御の中断を実行する自動駐車装置により効果的に達成される。
【0010】
本発明によれば、車速が比較的低いときには、上り坂を登るのに必要なアクセル操作が許容される一方で、車速が比較的高いときには、アクセルペダルの踏み込み動作から実際に車速が増加するまでの時間の遅れを考慮して、アクセル開度に応じて自動駐車制御を早い段階で中断させることができる。従って、本発明によれば、無用な中断を防止しつつより適切な段階で自動駐車制御を中断させることができ、駐車支援制御の信頼性が向上する。
【0011】
【発明の実施の形態】
以下、本発明の好ましい実施例について図面を参照して説明する。
【0012】
図1は、本発明による自動駐車装置の一実施例を示すシステム構成図である。図1に示す如く、自動駐車装置は、電子制御ユニット12(以下、「駐車支援ECU12」と称す)を中心に構成されている。駐車支援ECU12は、図示しないバスを介して互いに接続されたCPU、ROM、及びRAM等からなるマイクロコンピュータとして構成されている。ROMには、CPUが実行するプログラムや、後述する判定マップ等が格納されている。
【0013】
駐車支援ECU12には、高速通信バス等の適切なバスを介して、車両のヨー方向の角速度(ヨーレートYr)を検出するヨーレートセンサ14、ステアリングホイール(図示せず)の舵角Haを検出する舵角センサ16、及び、車両の速度Vを検出する車速センサ18が接続されている。車速センサ18は、各輪に配設され、車輪速に応じた周期でパルス信号を発生する車輪速センサであってよい。ヨーレートセンサ14、舵角センサ16及び車速センサ18の出力信号は、駐車支援ECU12に対して供給される。駐車支援ECU12には、また、アクセル開度を検出するアクセル開度センサ10が接続されている。アクセル開度センサ10は、アクセルペダルの踏み込み量に応じた出力信号を駐車支援ECU12に供給する。
【0014】
駐車支援ECU12には、また、リバースシフトスイッチ50及び駐車スイッチ52が接続されている。リバースシフトスイッチ50は、変速機レバーが後退位置に操作された場合にオン信号を出力し、それ以外の場合にオフ状態を維持する。また、駐車スイッチ52は、車室内に設けられ、ユーザによる操作が可能となっている。駐車スイッチ52は、常態でオフ状態に維持されており、ユーザの操作によりオン状態となる。駐車支援ECU12は、リバースシフトスイッチ50の出力信号に基づいて車両が後退する状況にあるか否かを判別すると共に、駐車スイッチ52の出力信号に基づいてユーザが駐車支援を必要としているか否かを判別する。
【0015】
駐車支援ECU12には、車両後部のバンパ中央部に配設されたバックモニタカメラ20、及び、車室内に設けられた表示モニタ22が接続されている。バックモニタカメラ20は、車両後方の所定角度領域における風景を撮影するCCDカメラであり、その撮影した画像信号を駐車支援ECU12に供給する。駐車支援ECU12は、リバースシフトスイッチ50及び駐車スイッチ52が共にオン状態にある場合に、表示モニタ22上にバックモニタカメラ20の撮像画像を表示する。このとき、表示モニタ22上には、撮像画像と共に駐車目標位置設定用タッチパネルが表示される。ユーザは、駐車目標位置設定用タッチパネルを用いて、撮像画像上の目標駐車枠を実際の駐車枠に合わせる操作を表示モニタ22上で行う。撮像画像上で目標駐車枠の位置が確定すると、駐車支援ECU12は、車両の現在位置から撮像画像上の駐車目標枠内へと障害物を回避しつつ車両を導く目標軌跡を演算すると共に、目標軌跡上の各位置で転舵されるべき車輪の目標転舵角を演算する。
【0016】
駐車支援ECU12には、自動操舵手段30、自動制動手段32及び自動駆動手段34が適切なバスを介して接続されている。駐車支援ECU12は、車両が目標軌跡に沿って駐車目標位置に導かれるように、自動操舵手段30、自動制動手段32及び自動駆動手段34を制御する。具体的には、運転者がブレーキペダルの踏み込み量を緩めることでクリープ力が発生し、車両の後退が開始すると、駐車支援ECU12は、駐車目標位置までの各車両位置において自動操舵手段30により車輪を自動的に目標転舵角だけ転舵させる。そして、最終的に車両が駐車目標位置に到達した際に、運転者に車両の停止を要求し(若しくは、自動制動手段32により車両を自動的に停止させ)、駐車支援制御が完了する。
【0017】
駐車支援ECU12は、この駐車支援制御を実行している間、駐車支援制御の中断条件が成立するか否かを監視している。この中断条件は、新たな障害物が検出された場合、運転者がステアリングホイールを所定トルク以上で操作した場合のような運転者の中断の意思が検出された場合等に成立する。中断条件が成立すると、駐車支援ECU12は、駐車支援制御を速やかに中断すると共に、必要に応じて自動制動手段32により車両を自動的に停止させる。
【0018】
ところで、上述の如く、駐車支援制御の中断条件の成立時に、駐車支援制御を速やかに中断して車両を自動的に停止させる場合であっても、中断条件の成立時にある速度で移動している車両は、即座に停止状態となることはなく、ある距離だけ移動して停止することになる。このため、例えば新たな障害物の出現により駐車支援制御を中断させる場合において、当該新たな障害物の出現の検出した際の車速によっては、当該新たな障害物に車両が接触等してしまうという不都合が生ずる場合がある。また、そもそも高い車速で駐車支援制御を継続することは、安全性の観点からも好ましくない。
【0019】
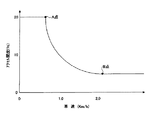
これに対して、本実施例では、車速に関する中断条件として、図2に示すような車速とアクセル開度の関係が用いられる。図2には、車速に対するアクセル開度の閾値を定義する判定マップが示されている。
【0020】
本実施例の駐車支援ECU12は、駐車支援制御の実行中、図2に示すような判定マップを用いて、車速センサ18の出力信号に基づいてアクセル開度の閾値を決定し、アクセル開度センサ10からのアクセル開度の検出値が当該閾値を超えた場合には、駐車支援制御を中断すべきであると判断し、一方、それ以外の場合には、他の中断条件が成立していない限り駐車支援制御を中断すべきでないと判断する。
【0021】
本実施例では、図2に示すように、車速が比較的小さいときには比較的小さなアクセル開度で中断条件が成立し、車速が比較的大きいときには比較的大きなアクセル開度で中断条件が成立する。より具体的には、アクセル開度の閾値は、車速がゼロからA点(例えば、0.5km/h)までの低速域に属するときは、比較的大きい第1の閾値(例えば、20%)に設定され、車速がA点からB点(例えば、2.0km/h)に至るまでは、第1の閾値から第2の閾値(例えば、7%)まで徐々に減少する可変値に設定され、車速がB点を超える高速域では第2の閾値に保持されている。
【0022】
ところで、アクセルペダルの踏み込みは車速の増加を引き起こすため、アクセルペダルの踏み込みが検出された時点(即ち、アクセル開度>0の時点)で自動駐車制御を中断させる構成も考えられる。しかしながら、かかる構成では、運転者がアクセルペダルに誤って触れてしまうだけで自動駐車制御が中断されることになる。また、例えば上り坂のようにクリープ力だけでは車両が後退しない場合には、運転者によるアクセルペダルの踏み込みが必要とされる。従って、自動駐車制御の有用性を高めるためには、自動駐車制御実行中にアクセルペダルの踏み込みを適切に許容することが望ましい。
【0023】
一方、アクセルペダルの踏み込みを許容する場合には、特に車速が高い値に達する可能性があるので、自動駐車制御が中断された際に即座に車両が停止しないことを考慮して、車速が上限値(許容可能な最大値)に達する前に未然に自動駐車制御を中断させることが望ましい。これに対して、アクセルペダルの踏み込みの有無やアクセルペダルの踏み込み量の如何に拘らず、車速が所定の閾値を超えた時点で自動駐車制御を中断させる構成も考えられる。しかしながら、実際にはアクセルペダルの踏み込み動作から車速が増加するまでに時間の遅れが生ずるため、ある瞬間の車速を監視するだけでは、車速が上限値に達する前に未然に自動駐車制御を中断させることができない。従って、かかる構成において、車速が上限値に達する前に未然に自動駐車制御を中断させるためには、上記所定の閾値を上限値よりも十分小さい値に設定せざるを得ず、この結果、無用に自動駐車制御が中断される場合が生ずる。
【0024】
これに対して、本実施例では、上述の如く、低速域では、アクセルペダルの踏み込み量の如何に拘らず車速が上限値に達する可能性が低いと判断し、上り坂等を上るためのアクセルペダルの踏み込み操作の必要性を優先して、比較的大きなアクセルペダルの踏み込み量が許容される。一方、高速域では、そのときのアクセルペダルの踏み込み量によっては車速がその後に上限値に達する可能性が高いことを考慮し、車速が上限値に達する前に自動駐車制御を中断させることを優先して、比較的小さなアクセルペダルの踏み込み量しか許容されない。
【0025】
従って、本実施例によれば、アクセルペダルの踏み込み量(即ち、アクセル開度)に基づいて自動駐車制御の中断の可否を判断することで、アクセルペダルの踏み込み動作から実際に車速が増加するまでの時間の遅れを考慮して、車速が上限値に達する前に未然に自動駐車制御を中断させることが可能となり、車速の増加に対する自動駐車制御の中断の応答性が向上する。また、本実施例によれば、車速に応じたアクセルペダルの踏み込み量を考慮することで、大きなアクセルペダルの踏み込み量を必要とする急な勾配に沿って車両を後退させる場合であっても、無用に自動駐車制御が中断されることがない。
【0026】
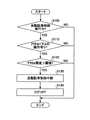
次に、図3を参照して本実施例の駐車支援ECU12が実行する処理について説明する。尚、本処理ルーチンは、駐車支援制御の開始と同時に起動し、アクセル開度センサ10のサンプリング周期毎に実行されてよい。尚、駐車支援ECU12には、アクセル開度センサ10のサンプリング周期毎にアクセル開度センサ10及び車速センサ18の出力信号が供給されている。
【0027】
ステップ100では、駐車支援制御の実行中フラグがオンとなっているか否かが判断される。この駐車支援制御の実行中フラグは、例えば、表示モニタ22上で目標駐車枠の位置が確定した時点でオン状態とされ、車両が目標駐車位置に到達した時点でオフ状態とされるフラグであってよい。本ステップ100において、駐車支援制御の実行中フラグがオン状態となっている場合には、ステップ110に進み、オフ状態となっている場合には、以後何ら処理が進められることなく、今回のルーチンが終了される。
【0028】
ステップ110では、アクセル開度センサ10から得られたアクセル開度に基づいて、運転者によるアクセルペダルの操作の有無が判断される。運転者によるアクセルペダルの操作が検出された場合、ステップ120に進み、検出されない場合には、以後何ら処理が進められることなく、今回のルーチンが終了される。
【0029】
ステップ120では、図2に示すような判定マップを用いて、車速センサ18からの車速に応じてアクセル開度センサに対する閾値が決定され、当該閾値とアクセル開度センサ10から得られたアクセル開度の検出値との比較処理が実行される。本ステップ120で、アクセル開度センサ10から得られたアクセル開度が閾値より大きい場合、自動駐車制御を中断すべきであると判断して、ステップ130に進む。一方、アクセル開度センサ10から得られたアクセル開度が閾値より大きくない場合、今回のルーチンで自動駐車制御を中断すべきでないと判断して、以後何ら処理が進められることなく、今回のルーチンが終了される。
【0030】
ステップ130では、自動駐車制御を中断するための処理が実行される。ステップ130の処理が終了されると、ステップ140において駐車支援制御の実行中フラグがオフされた後、今回のルーチンが終了される。尚、本実施例において、車速センサ18からの車速が所定値を超えている場合には、アクセル開度センサ10のアクセル開度を評価することなく、本ステップ130の処理が実行されてもよい。
【0031】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形及び置換を加えることができる。
【0032】
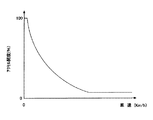
特に図2に示す判定マップに関しては、本発明の範囲を逸脱することなく、種々の変形及び置換を加えることができる。例えば、図4に示すように、アクセル開度の閾値は、車速がB点からゼロに至るまでは、第2の閾値から最大値100%まで増加するような可変値にすることも可能である。かかる場合、車速がゼロ付近であるときにはアクセル開度の値に影響されることなく、自動駐車制御が継続される。
【0033】
また、上述した実施例では、車速に応じてアクセル開度の閾値を可変とする構成であったが、本発明は、特にこれに限定されることはなく、アクセル開度に応じて車速の閾値を可変とする構成も当然に可能である。この場合、アクセル開度が小さい場合には、車速の閾値が大きい値に設定され、アクセル開度が大きい場合には、車速の閾値が小さい値に設定される。これにより、上述の実施例と同様の効果を得ることができる。
【0034】
また、同一の車速であってもアクセルペダルの踏み込みの有無によって、駐車支援制御の中断時から停止するまでの車両の移動距離が異なる場合があることを考慮して(特に、車両の停止が運転者によるブレーキペダルの操作によって実現される場合には、アクセルペダルの操作の有無によってブレーキペダルの操作に要する時間が異なるため)、アクセルペダルの踏み込みの有無によって車速の閾値を可変とする構成も可能である。
【0035】
【発明の効果】
本発明によれば、運転者によるアクセルペダルの操作を許容しつつ、自動駐車制御をより適切な段階で中断させることが可能となる。
【図面の簡単な説明】
【図1】本発明による自動駐車装置の一実施例を示すシステム構成図である。
【図2】車速に対するアクセル開度の閾値を定義する判定マップの一実施例を示す図である。
【図3】本実施例の駐車支援ECU12が実行する処理ルーチンのフローチャートである。
【図4】車速に対するアクセル開度の閾値を定義する判定マップのその他の実施例を示す図である。
【符号の説明】
10 アクセル開度センサ
12 駐車支援ECU
14 ヨーレートセンサ
16 舵角センサ
18 車速センサ
20 バックモニタカメラ
22 表示モニタ
30 自動操舵手段
32 自動制動手段
34 自動駆動手段
50 リバースシフトスイッチ
52 駐車スイッチ
Claims (3)
- 車両を目標駐車位置まで自動的に導く駐車支援制御を実行する自動駐車装置において、
検出した車速とアクセル開度との関係に基づいて、駐車支援制御の中断の必要性を判断することを特徴とする、自動駐車装置。 - 車速が比較的低いときには、比較的大きいアクセル開度まで駐車支援制御の中断を実行しない一方、車速が比較的高いときには、比較的小さいアクセル開度で中断を実行する、請求項1記載の自動駐車装置。
- アクセル開度が比較的小さいときには、車速が比較的高い値に達するまで駐車支援制御の中断を実行しない一方、アクセル開度が比較的大きいときには、車速が比較的低い値に達した場合に駐車支援制御の中断を実行する、請求項1記載の自動駐車装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003081090A JP3861068B2 (ja) | 2003-03-24 | 2003-03-24 | 自動駐車装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003081090A JP3861068B2 (ja) | 2003-03-24 | 2003-03-24 | 自動駐車装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004284530A true JP2004284530A (ja) | 2004-10-14 |
| JP3861068B2 JP3861068B2 (ja) | 2006-12-20 |
Family
ID=33294760
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003081090A Expired - Fee Related JP3861068B2 (ja) | 2003-03-24 | 2003-03-24 | 自動駐車装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3861068B2 (ja) |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1892178A2 (en) | 2006-08-25 | 2008-02-27 | Jtekt Corporation | Vehicle steering system |
| WO2008105283A1 (ja) * | 2007-02-27 | 2008-09-04 | Toyota Jidosha Kabushiki Kaisha | 車両走行支援装置及び方法 |
| US7516003B2 (en) | 2006-06-07 | 2009-04-07 | Jtekt Corporation | Vehicle steering system |
| JP2009286211A (ja) * | 2008-05-28 | 2009-12-10 | Nsk Ltd | 電動パワーステアリング装置 |
| WO2014083818A1 (ja) * | 2012-11-27 | 2014-06-05 | 日産自動車株式会社 | 車両用加速抑制装置及び車両用加速抑制方法 |
| WO2014083819A1 (ja) * | 2012-11-27 | 2014-06-05 | 日産自動車株式会社 | 車両用加速抑制装置及び車両用加速抑制方法 |
| WO2014083820A1 (ja) * | 2012-11-27 | 2014-06-05 | 日産自動車株式会社 | 車両用加速抑制装置及び車両用加速抑制方法 |
| DE102006035371B4 (de) * | 2005-10-28 | 2017-06-01 | Advics Co., Ltd. | Fahrunterstützungsvorrichtung |
| US9862379B2 (en) | 2015-11-11 | 2018-01-09 | Hyundai Motor Company | Parking assist apparatus and method for controlling vehicle speed |
| JP2018150012A (ja) * | 2017-03-15 | 2018-09-27 | 本田技研工業株式会社 | 駐車支援装置 |
| CN109501797A (zh) * | 2018-12-07 | 2019-03-22 | 威马汽车科技集团有限公司 | 一种自动泊车的控制方法及自动泊车系统 |
| DE102019117023A1 (de) | 2018-06-27 | 2020-01-02 | Toyota Jidosha Kabushiki Kaisha | Parkassistenzvorrichtung |
| JP2020142752A (ja) * | 2019-03-08 | 2020-09-10 | トヨタ自動車株式会社 | 駐車支援装置 |
| CN113060128A (zh) * | 2019-12-13 | 2021-07-02 | 丰田自动车株式会社 | 车辆 |
| US11872982B2 (en) | 2019-03-22 | 2024-01-16 | Toyota Jidosha Kabushiki Kaisha | Parking assistance device |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0374256A (ja) * | 1989-06-08 | 1991-03-28 | Fuji Heavy Ind Ltd | 自動車用電動式パワステアリング装置兼自動操舵装置 |
| JPH10114272A (ja) * | 1996-10-09 | 1998-05-06 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JPH10278825A (ja) * | 1997-04-07 | 1998-10-20 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JPH10297520A (ja) * | 1997-04-28 | 1998-11-10 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JPH1178946A (ja) * | 1997-09-16 | 1999-03-23 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JP2001001929A (ja) * | 1999-06-22 | 2001-01-09 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JP2001063596A (ja) * | 1999-08-26 | 2001-03-13 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JP2001138941A (ja) * | 1999-11-16 | 2001-05-22 | Honda Motor Co Ltd | 車両の自動操舵装置 |
-
2003
- 2003-03-24 JP JP2003081090A patent/JP3861068B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0374256A (ja) * | 1989-06-08 | 1991-03-28 | Fuji Heavy Ind Ltd | 自動車用電動式パワステアリング装置兼自動操舵装置 |
| JPH10114272A (ja) * | 1996-10-09 | 1998-05-06 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JPH10278825A (ja) * | 1997-04-07 | 1998-10-20 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JPH10297520A (ja) * | 1997-04-28 | 1998-11-10 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JPH1178946A (ja) * | 1997-09-16 | 1999-03-23 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JP2001001929A (ja) * | 1999-06-22 | 2001-01-09 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JP2001063596A (ja) * | 1999-08-26 | 2001-03-13 | Honda Motor Co Ltd | 車両の自動操舵装置 |
| JP2001138941A (ja) * | 1999-11-16 | 2001-05-22 | Honda Motor Co Ltd | 車両の自動操舵装置 |
Cited By (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006035371B4 (de) * | 2005-10-28 | 2017-06-01 | Advics Co., Ltd. | Fahrunterstützungsvorrichtung |
| US7516003B2 (en) | 2006-06-07 | 2009-04-07 | Jtekt Corporation | Vehicle steering system |
| EP1892178A2 (en) | 2006-08-25 | 2008-02-27 | Jtekt Corporation | Vehicle steering system |
| US7865283B2 (en) | 2006-08-25 | 2011-01-04 | Jtekt Corporation | Vehicle steering system |
| WO2008105283A1 (ja) * | 2007-02-27 | 2008-09-04 | Toyota Jidosha Kabushiki Kaisha | 車両走行支援装置及び方法 |
| JP2008207727A (ja) * | 2007-02-27 | 2008-09-11 | Toyota Motor Corp | 車両走行支援装置 |
| JP2009286211A (ja) * | 2008-05-28 | 2009-12-10 | Nsk Ltd | 電動パワーステアリング装置 |
| US9493070B2 (en) | 2012-11-27 | 2016-11-15 | Nissan Motor Co., Ltd. | Vehicle acceleration suppression device and vehicle acceleration suppression method |
| WO2014083820A1 (ja) * | 2012-11-27 | 2014-06-05 | 日産自動車株式会社 | 車両用加速抑制装置及び車両用加速抑制方法 |
| JP5892259B2 (ja) * | 2012-11-27 | 2016-03-23 | 日産自動車株式会社 | 車両用加速抑制装置及び車両用加速抑制方法 |
| JP5892260B2 (ja) * | 2012-11-27 | 2016-03-23 | 日産自動車株式会社 | 車両用加速抑制装置及び車両用加速抑制方法 |
| JP5999195B2 (ja) * | 2012-11-27 | 2016-09-28 | 日産自動車株式会社 | 車両用加速抑制装置及び車両用加速抑制方法 |
| WO2014083819A1 (ja) * | 2012-11-27 | 2014-06-05 | 日産自動車株式会社 | 車両用加速抑制装置及び車両用加速抑制方法 |
| WO2014083818A1 (ja) * | 2012-11-27 | 2014-06-05 | 日産自動車株式会社 | 車両用加速抑制装置及び車両用加速抑制方法 |
| US9862379B2 (en) | 2015-11-11 | 2018-01-09 | Hyundai Motor Company | Parking assist apparatus and method for controlling vehicle speed |
| JP2018150012A (ja) * | 2017-03-15 | 2018-09-27 | 本田技研工業株式会社 | 駐車支援装置 |
| US11273822B2 (en) | 2018-06-27 | 2022-03-15 | Toyota Jidosha Kabushiki Kaisha | Parking assist apparatus |
| DE102019117023A1 (de) | 2018-06-27 | 2020-01-02 | Toyota Jidosha Kabushiki Kaisha | Parkassistenzvorrichtung |
| DE102019117023B4 (de) | 2018-06-27 | 2024-04-18 | Toyota Jidosha Kabushiki Kaisha | Parkassistenzvorrichtung |
| CN109501797A (zh) * | 2018-12-07 | 2019-03-22 | 威马汽车科技集团有限公司 | 一种自动泊车的控制方法及自动泊车系统 |
| JP2020142752A (ja) * | 2019-03-08 | 2020-09-10 | トヨタ自動車株式会社 | 駐車支援装置 |
| US11884262B2 (en) | 2019-03-08 | 2024-01-30 | Toyota Jidosha Kabushiki Kaisha | Parking assist apparatus |
| US11872982B2 (en) | 2019-03-22 | 2024-01-16 | Toyota Jidosha Kabushiki Kaisha | Parking assistance device |
| CN113060128A (zh) * | 2019-12-13 | 2021-07-02 | 丰田自动车株式会社 | 车辆 |
| CN113060128B (zh) * | 2019-12-13 | 2024-05-17 | 丰田自动车株式会社 | 车辆 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP3861068B2 (ja) | 2006-12-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7147924B2 (ja) | 運転支援装置 | |
| US7337056B2 (en) | Driving control apparatus | |
| JP3171119B2 (ja) | 車両の自動運転制御装置 | |
| JP4386082B2 (ja) | 車両走行支援装置 | |
| CN101626933B (zh) | 车辆行驶辅助装置以及方法 | |
| JP2004284530A (ja) | 自動駐車装置 | |
| JP3573134B2 (ja) | 車両用運転操作補助装置 | |
| JP7663315B2 (ja) | 車両の操舵支援装置 | |
| JP2012025378A (ja) | 車両駐車支援制御装置及び車両駐車支援制御方法 | |
| JP2014091380A (ja) | 運転走行支援装置 | |
| CN102826092B (zh) | 智能型巡航控制系统及利用该系统的车间距控制方法 | |
| JP3785959B2 (ja) | 車両用走行制御装置 | |
| JP5862799B2 (ja) | 車両用加速抑制装置及び車両用加速抑制方法 | |
| JP7308198B2 (ja) | モータ制御装置及び方法、並びに電動アシスト車 | |
| JP4188740B2 (ja) | 自動車運転支援装置 | |
| US20070034440A1 (en) | Method and device for preventing unintended acceleration of a vehicle | |
| JP2020083275A (ja) | 運転支援装置 | |
| JP5708456B2 (ja) | 車両の制御装置 | |
| JP2017144817A (ja) | 先行車追従走行制御装置および先行車追従走行制御方法 | |
| JP4606756B2 (ja) | 走行制御装置 | |
| US12583548B2 (en) | Controller and control method for rider assistance system | |
| JP2005231490A (ja) | 追従走行制御装置 | |
| JP5292965B2 (ja) | 走行制御装置 | |
| JP4254139B2 (ja) | 車両用制動力発生装置 | |
| JP5862068B2 (ja) | 車両用運転支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050902 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060606 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060807 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060919 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060925 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 3861068 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100929 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100929 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110929 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120929 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130929 Year of fee payment: 7 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |