JP2004358575A - ロボットシステム、ロボットのインピーダンス制御方法 - Google Patents
ロボットシステム、ロボットのインピーダンス制御方法 Download PDFInfo
- Publication number
- JP2004358575A JP2004358575A JP2003157047A JP2003157047A JP2004358575A JP 2004358575 A JP2004358575 A JP 2004358575A JP 2003157047 A JP2003157047 A JP 2003157047A JP 2003157047 A JP2003157047 A JP 2003157047A JP 2004358575 A JP2004358575 A JP 2004358575A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- displacement
- arm
- force
- detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Manipulator (AREA)
Abstract
【課題】力覚センサで検出できる閾値を大きく設定した場合であっても、小さな外力でロボットを好適に制御できるようなインピーダンス制御方法などを提供する。
【解決手段】ロボット1側に、複数のアーム10と、人間の腕を載置する載置台11aと、載置台11aを介して入力される外力を検出する力覚センサ13と、アーム先端10aに対する載置台11a上の腕の変位を検出する変位検出センサ12とを設け、この変位検出センサ12で検出された変位、および、力覚センサ13で検出された外力を入力値としてロボットをインピーダンス制御する。
【選択図】 図4
【解決手段】ロボット1側に、複数のアーム10と、人間の腕を載置する載置台11aと、載置台11aを介して入力される外力を検出する力覚センサ13と、アーム先端10aに対する載置台11a上の腕の変位を検出する変位検出センサ12とを設け、この変位検出センサ12で検出された変位、および、力覚センサ13で検出された外力を入力値としてロボットをインピーダンス制御する。
【選択図】 図4
Description
【0001】
【発明の属する技術分野】
本発明は、ロボットのインピーダンス制御に関するもので、より詳しくは、大きな外力を必要とすることなくロボットを制御できるようにしたインピーダンス制御方法などに関する。
【0002】
【従来の技術】
人間との協働作業に好適に使用されるロボットの制御方法として、下記の特許文献1に記載されるようなインピーダンス制御方法が知られている。
【0003】
【特許文献1】
特開2001―038664号公報
【0004】
このインピーダンス制御は、ロボットのアームの動きに硬さや柔らかさを持たせるようにしたもので、Fをロボットアームの先端に作用する外力、Mをインピーダンス特性における慣性係数、Dをインピーダンス特性における粘性係数、Kをインピーダンス特性における剛性係数、p、p’、p”をそれぞれ算出すべきロボットアームの先端の位置、速度、加速度とした場合、
【0005】
Mp”+Dp’+Kp=F (式1)
【0006】
なる関係式によって制御させるものである。なお、ここで外力Fはロボットアームの先端に設けられた力覚センサによって検出されるものであり、また、慣性係数M、粘性係数D、剛性係数Kはパーソナルコンピュータなどのインピーダンス制御装置によってあらかじめ入力されているものである。そして、この関係式によってロボットアームの先端の位置p、速度p’、加速度p”を算出し、この算出された位置pにロボットアームの先端が位置するように、サーボドライバを介してアクチュエータへ速度p’に関する信号を出力するようにしたものである。
【0007】
【発明が解決しようとする課題】
ところで、このようなインピーダンス制御に用いられる式1に入力される値は、力覚センサで検出された外力Fのみである。このため、このようにインピーダンス制御されるロボットを、例えば、人間の腕を下から支持してその動きを補助するような介護用ロボットとして使用する場合、次のような問題を生じる。すなわち、力覚センサで検出しうる力の閾値を大きく設定した場合、その閾値を超える大きな力を加えなければその外力を検出することができない。ところが、被介護者には、通常そのような大きな力が備わっていないため、結果としてそのロボットを駆動させることができない。一方、力覚センサで検出しうる力の閾値を小さく設定した場合は、被介護者の力に対応した小さな力を検出できるものの、今度は被介護者の腕に震えが生じた場合や、もしくは、外部からノイズが入り込んだ場合、これに敏感に反応してしまってロボットの動きが不自然なものになってしまう。このため、従来のインピーダンス制御では、使用状態に対応して力覚センサの閾値を設定するのが非常に困難であった。
【0008】
また、従来のインピーダンス制御では、ロボットの慣性係数M、粘性係数D、剛性係数Kの値を大きく設定すると、アームの動きが重くなるため、ロボットアームの先端に大きな力を加えなければアームを駆動できない。このため、被介護者のような力の弱い者ではこのアームを駆動させることができなくなる。一方、これらの値を小さく設定すると、小さな力やノイズにアームが敏感に反応してしまうという問題を有していた。
【0009】
さらに、別の問題点として、ロボットアームの先端を高い剛性を持って人間が保持した場合、インピーダンス制御特有の問題として、ロボットのアームに振動を生じさせてしまうという問題が存在する。これを解決すべく、従来では、ロボットの慣性係数M、粘性係数Dの値を大きく設定して、ロボットアームの動きに重い特性や硬い特性を持たせるようにしているが、このようにすれば、大きな外力を加えなければロボットアームを駆動できなくなり、被介護者用のロボットとしては不適切なものになるという問題を生じていた。
【0010】
そこで、本発明は上記課題に着目してなされたもので、力覚センサで検出できる力の閾値に依存することなく、また、慣性係数Mや粘性係数Dを大きく設定した場合であってロボットアームを好適に駆動制御できるようなロボットのインピーダンス制御方法などを提供することを目的とする。
【0011】
【課題を解決するための手段】
本発明は、上記課題を解決するために、ロボット側に、複数のアームと、このアームに作用する外部環境の外力を検出する力覚センサと、アームと外部環境との変位を検出する変位検出センサとを具備し、この変位検出センサで検出された変位および前記力覚センサで検出された外力を入力値としてインピーダンス制御を行うように構成したものである。
【0012】
このように構成すれば、例えば、ノイズの影響を受けないように力覚センサの閾値を大きくした場合であっても、閾値を大きくすることによって検出できなくなった小さな力に代わって外部環境の変位を入力するため、小さな力でロボットをインピーダンス制御することができる。また、アームの振動を防止すべく慣性係数Mや粘性係数Dを大きく設定した場合であっても、同様に、外部環境との変位を入力するようにしているため、小さな力によって生ずる変位に対応したロボットをインピーダンス制御することができる。
【0013】
そして、この外部環境との変位を検出する際、外部環境と接触する接触部材を設け、この接触部材を介して入力される外部環境の外力を力覚センサで検出するとともに、この接触部材をアームの先端に対して変位可能に構成し、この接触部材の変位を変位検出センサで検出する。そして、これらの外力や変位を入力値としてインピーダンス制御する。
【0014】
このように構成すれば、外部環境の外力を検出するための接触部材と、外部環境の変位を検出するための接触部材をそれぞれ個別に設ける場合に比べて、簡単な構成で外力や変位を検出することができる。
【0015】
さらに、インピーダンス制御を行う際、外部環境の剛性係数の増大に伴ってロボット側の粘性係数を増大させるようにする。
【0016】
このように構成すれば、例えば、人間とロボットが協働作業をするような場合、人間の固い動きに対応してロボットの動きに硬さを持たせることができ、また、逆に人間の柔らかい動きに対応してロボットの動きに柔らかさを持たせることができる。
【0017】
【発明の実施の形態】
以下、本発明の実施形態について図面を参照して説明する。図1は、本実施形態におけるロボット1およびインピーダンス制御装置2から成るロボットシステム100を示したものであり、図2はそのロボット1のアーム先端10aの拡大図を示したものである。また、図3および図4はインピーダンス制御のブロック図および制御線図を示したものである。
【0018】
このロボット1は、図1および図2に示すように、人間の腕を載置するための載置部材11と、複数の関節14によって接続された複数のアーム10とを備えてなるもので、このアーム10の先端10aに、外部環境の外力を検出する力覚センサ13と、アーム先端10aに対する腕の変位を検出する変位検出センサ12とを設ける。また、周知のように、この関節14内には、各アーム10を移動させるためのアクチュエータを有する。
【0019】
この載置部材11は、人間の肘から手首までの腕部分を載置するための載置台11aと、アーム先端10aに取り付けられたベース部材11cと、これら載置台11aとベース部材11cとを連結する連結部材11bを備える。そして、この載置台11a、連結部材11b、ベース部材11cによって平行リンクを構成している。
【0020】
この載置台11aは、人間の腕の部分を載置するチャネル状の部材によって構成されるもので、人間の腕をベルトなどで拘束することなく上方から自由に腕を載置できるように構成している。そして、その載置台11aと腕との摩擦によって、この載置台11aを動かせるようにしている。
【0021】
ベース部材11cは、この載置台11aに対向して設けられる平面状のもので、その上面に連結部材11bと変位検出センサを設ける。
【0022】
連結部材11bは、載置台11aとベース部材11cとに設けられるもので、載置台11aおよびベース部材11cに回動可能に取り付け、これによって平行リンクを構成する。そして、この回動領域を所定の範囲に規制することによって、載置台11aを所定の範囲内でx方向、y方向、z方向へ変位できるようにしている。
【0023】
変位検出センサ12は、棒状のスティック12aと、このスティック12aの傾動角度を検出しうる図示しないエンコーダをベース12cの内部に備えてなる。そして、そして、このベース12cをベース部材11c上に固定して取り付けるとともに、そのスティック12aの先端部12bを載置台11aの裏側に回動可能に取り付ける。そして、載置台11aの変位に伴ってそのスティック12aを傾動変位させ、載置台11a上の腕の変位をx方向、y方向、z方向に検出する。
【0024】
一方、力覚センサ13は、ベース部材11cとアーム先端10aとの間に設けられ、載置台11aを介して入力された外部環境のx方向、y方向、z方向の外力を検出する。この力覚センサ13は、本実施形態ではx方向、y方向、z方向の外力を検出するものであるが、さらにx軸回り、y軸回り、z軸回りのトルクも加えた検出を行えるようなものを用いても良い。
【0025】
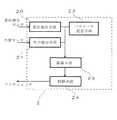
一方、インピーダンス制御装置2は、パーソナルコンピュータやサーボドライバなどを具備してなるもので、内蔵するCPUやメモリ、およびキーボードなどの入力手段などを用いて、図3に示す変位検出手段20、外力検出手段21、パラメータ設定手段22、演算手段23、制御手段24を機能させる。
【0026】
変位検出手段20は、載置部材11に取り付けられた変位検出センサ12からの信号に基づいてスティック12の先端部12bの座標位置を検出する。この検出は、あらかじめサンプリング時間を設定し、このサンプル時間毎に変位検出センサ12のエンコーダの変位角度θi(i=x、y、z)を読み出すことによって行う。そして、これによりスティック先端部12bの座標p0
【0027】
x軸方向;p0=Lsinθx+p (式2)
y軸方向;p0=Lsinθy+p (式3)
z軸方向;p0=Lcosθz+p (式4)
【0028】
を算出する。なお、ここでLはスティック12aの長さであり、pはアーム先端10aの座標であって初期状態で設定された座標もしくは、ロボット1の制御中において演算によって求められる座標である。
【0029】
外力検出手段21は、アーム先端10aに設けられた力覚センサ13からの入力信号に基づいて外部環境の外力を検出する。この外力の検出についても同様に、あらかじめサンプリング時間を設定し、このサンプリング時間毎に力覚センサ13の信号を読み出して、x軸方向、y軸方向、z軸方向の外力Fi(i=x、y、z)を検出する。この力覚センサ13で検出できる外力の閾値は、ノイズの影響によるロボット1の誤動作を防止できる程度の大きさに設定される。
【0030】
パラメータ設定手段22は、インピーダンス制御に用いられる慣性係数M、粘性係数D、剛性係数Kなどのパラメータを設定するもので、後述する式9の慣性係数M、粘性係数D、剛性係数Kなどを設定する。このパラメータの設定は、パーソナルコンピュータのキーボードを用いて入力され、もしくは、外部環境のロボットへの作用状態に対応して設定される。このロボットへの作用状態に対応するパラメータの設定方法としては、例えば、外部環境をバネとみなしてその剛性係数Khを算出し、その剛性係数Khに比例してロボット1側の粘性係数Dを設定する方法などが考えられる。このパラメータの設定方法に関して詳述する。
【0031】
まず、外部環境がロボット1に外力を加える場合、その外部環境の力の平衡点(外力がゼロとなる座標)は常に移動するため、外部環境を、平衡点の移動するバネとみなして、
【0032】
F(t)=Kh(p(t)―p1(t)) (式5)
【0033】
と仮定する。なお、ここでFは外部環境の外力、p1は外部環境の平衡点である。また、pは外部環境とロボットの接触位置における座標であり、スティック12aの先端部12bの座標である。
【0034】
ところで、外部環境が低速で変位する場合、サンプリング時間内においては、平衡点の移動は微少範囲にとどまると仮定することができるため(p1(t)≒p1(t−ts))、隣接サンプリング時間における平衡点の移動を無視することができる。よって、時刻tにおける式5から時刻(t−ts)における式5を引くことにより、
【0035】
ΔF(t)=KhΔp(t) (式6)
【0036】
なる関係式が得られる。これにより、外部環境の平衡点の項p1(t)を消去し、外部環境の剛性係数Khを推定する。
【0037】
一方、外部環境が高速に変位する場合、サンプリング時間における平衡点の移動を無視することができないため、アーム先端10aの速度vを考慮した式
【0038】
Δp(t)=p(t)―p(t−ts)―tsv(t−ts) (式7)
【0039】
を用いる。なお、このpについては、ロボット1のコンプライアンスを考慮するようにしても良く、この場合、式7のpは下式のp*に置換される。
【0040】
p*(t)=p(t)+Cend(t)F(t) (式8)
(Cend(t);ロボット1のコンプライアンス行列)
【0041】
そして、式6を用いて逐次最小二乗法などで外部環境の剛性係数Khを推定する。
【0042】
そして、このようにして得られた外部環境の剛性係数Khに対応してロボットの粘性係数を変化させる場合、図5に示すように、外部環境の剛性係数Khとロボットの粘性係数Dにあらかじめ比例関係を持たせて記憶しておき、これによって剛性係数の増加に伴った粘性係数Dを算出する。
【0043】
このようにすれば、例えば、人間がロボット1に支持されながら重量物を保持するような場合、人間がしっかりとその運搬物を持つ(Khが増大した状態)ことでロボット1側にもその動きに対応した硬さ(粘性係数Dが増大した状態)を持たせることができ、また、逆に、軽量物を軽く保持する(Khが減少した状態)ような場合、人間側のしなやかな運動に伴ってロボット1側もしなやかさ(粘性係数Dが減少した状態)を持たせることができる。
【0044】
演算手段23は、このように変位検出手段20によって検出されたスティック先端部12bの座標および外力検出手段21によって検出された外力を入力値として、また、パラメータ設定手段22によって設定された慣性係数M、粘性係数D、剛性係数Kを用いてアーム先端10aの位置p、速度p’、加速度p”を演算する。この演算は、インピーダンス特性の微分方程式である下記の式9を用いて行われる。
【0045】
Mp”+Dp’+K(p−p0)=F (式9)
【0046】
制御手段24は、このように算出された速度p’に関する信号をサーボドライバを介してアクチュエータに出力し、フェードバック制御によってこの算出された位置pにアーム先端10aを移動させるように制御する。
【0047】
次に、ロボット1の制御方法について図4の制御線図を用いて説明する。
【0048】
まず、ロボット1を制御するに際して、あらかじめ、パーソナルコンピュータの入力手段などを用いてインピーダンス制御の際の慣性係数M、粘性係数D、弾性係数Kを設定しておく。そして、この状態で載置部材11に人間の腕を載置し、パーソナルコンピュータからの指令によって、サンプリング時間毎に変位検出センサ12の変位値および力覚センサ13の外力を検出する。そして、これらの変位値および外力を入力値とし、式9用いて、アーム先端10aの位置p、速度p’、加速度p”を算出する。そして、この算出された速度p’をサーボドライバを介してアクチュエータに出力し、アーム先端10aの位置をその算出された位置pに移動させるようフィードバック制御する。この制御においては、インピーダンス特性の微分方程式を用いているため、(p−p0)の項がゼロに近づくようにアーム先端10aが移動する。すなわち、スティック12aの角度θi(i=x、y、z)がゼロとなるようにアーム先端10aが動き、これによって、人間の腕の動きに追従するようになる。
【0049】
このように本実施形態によれば、インピーダンス制御を用いたロボット1の制御方法において、従来のように力覚センサ13で検出される外力だけを入力値とするのではなく、変位検出センサ12で検出される外部環境とアーム先端12aとの変位も入力値として用いるようにしたので、力覚センサ13で検出しうる外力の閾値を大きく設定した場合であっても、変位検出センサ12で変位を検出させ、その変位をゼロに近づけるようにアームを駆動することができるようになる。これにより、小さな力でロボット1をインピーダンス制御することができ、しかも、力覚センサ13へ入り込むノイズの影響を少なくすることができる。また、アームの振動を防止するために慣性係数Mや粘性係数Dを大きく設定した場合であっても、同様に、外部環境との変位を入力するようにしているため、小さな力でロボットをインピーダンス制御することができる。
【0050】
また、この実施形態では、載置部材11aを介して外部環境の外力とその変位を検出するようにしたので、それぞれの力覚センサ13および変位検出センサ12毎に別個の接触部材を設けて外力や変位を検出する場合に比べて、簡単な構成でその外力や変位を検出することができる。また、単一の載置部材11aを介して外部環境の同一部位からの外力と変位を検出するので、それぞれ対応のとれた外力と変位を用いてインピーダンス制御することができる。
【0051】
さらに、この実施形態では、ロボット1側の粘性係数Dを設定するに際して、外部環境の剛性係数Khを算出し、その剛性係数Khに比例するような粘性係数Dを用いるようにしたので、人間の固い動きに対応してロボット1側にも固い動きを持たせることができ、また、逆に人間の柔らかい動きに対応してロボット1側にも柔らかい動きを持たせることができる。
【0052】
なお、本発明は上記実施形態に限定されることなく、種々変更して実施することができる。
【0053】
例えば、上記実施形態では、変位検出センサ12として長さの伸縮しないスティック12aを用いたものを例に挙げて説明したが、これに限らず、スティック12aの長さが伸縮するものを用いて同様の構成を実現することができる。この場合、そのスティックの内部に伸縮するバネとその伸縮長さを検出するフォトセンサを設け、エンコーダとともにこの検出した伸縮した長さに関する情報を用いてスティック先端部の座標を検出すると良い。そして、上記実施形態の平行リンクである載置部材11に代えて、その伸縮するスティックの上に別の載置台を設け、これにより外部環境の変位を検出する。
【0054】
また、上記実施形態では、棒状のスティック12aを有する変位検出センサ12を用いて説明したが、これに限らず、x方向、y方向、z方向への変位を検出できるような構成であればどのような構成であっても良い。例えば、表面を露出させたボールを外部環境に接触させて、x方向、y方向の変位を検出できるようにするとともに、このボールをz方向へも変位させてそのz方向の変位も検出できるようにしても良い。
【0055】
また、本実施形態では、介護用のロボット1として外部環境である人間の腕を支持するようなアプリケーションを例に挙げて説明したが、これに限らず、インピーダンス制御の入力として外力と変位を好適に使用できるものであれば、どのようなアプリケーションに利用しても良い。
【0056】
【発明の効果】
本発明では、ロボット側に、複数のアームと、アームの先端に作用する外部環境の外力を検出する力覚センサと、アームの先端に対する外部環境の変位を検出する変位検出センサとを設け、この変位検出センサで検出された変位および前記力覚センサで検出された外力を入力値としてロボットをインピーダンス制御するように構成したので、力覚センサで検出できる閾値を大きく設定した場合であっても、小さな力でロボットをインピーダンス制御することができる。また、アームの振動を防止すべく慣性係数Mや粘性係数Dを大きく設定した場合であっても、同様に、外部環境との変位を入力するようにしているため、小さな力によって生ずる変位に対応したロボットをインピーダンス制御することができる。
【図面の簡単な説明】
【図1】本実施の形態におけるロボットシステムの概観図
【図2】同形態におけるアーム先端近傍の拡大図
【図3】同形態におけるブロック図
【図4】同形態における制御線図
【図5】ロボット側の粘性係数と外部環境の剛性係数との関係を示す図
【符号の説明】
1・・・ロボット
2・・・インピーダンス制御装置
10・・・アーム
10a・・・アーム先端
12・・・変位検出センサ
13・・・力覚センサ
24・・・制御手段
100・・・ロボットシステム
【発明の属する技術分野】
本発明は、ロボットのインピーダンス制御に関するもので、より詳しくは、大きな外力を必要とすることなくロボットを制御できるようにしたインピーダンス制御方法などに関する。
【0002】
【従来の技術】
人間との協働作業に好適に使用されるロボットの制御方法として、下記の特許文献1に記載されるようなインピーダンス制御方法が知られている。
【0003】
【特許文献1】
特開2001―038664号公報
【0004】
このインピーダンス制御は、ロボットのアームの動きに硬さや柔らかさを持たせるようにしたもので、Fをロボットアームの先端に作用する外力、Mをインピーダンス特性における慣性係数、Dをインピーダンス特性における粘性係数、Kをインピーダンス特性における剛性係数、p、p’、p”をそれぞれ算出すべきロボットアームの先端の位置、速度、加速度とした場合、
【0005】
Mp”+Dp’+Kp=F (式1)
【0006】
なる関係式によって制御させるものである。なお、ここで外力Fはロボットアームの先端に設けられた力覚センサによって検出されるものであり、また、慣性係数M、粘性係数D、剛性係数Kはパーソナルコンピュータなどのインピーダンス制御装置によってあらかじめ入力されているものである。そして、この関係式によってロボットアームの先端の位置p、速度p’、加速度p”を算出し、この算出された位置pにロボットアームの先端が位置するように、サーボドライバを介してアクチュエータへ速度p’に関する信号を出力するようにしたものである。
【0007】
【発明が解決しようとする課題】
ところで、このようなインピーダンス制御に用いられる式1に入力される値は、力覚センサで検出された外力Fのみである。このため、このようにインピーダンス制御されるロボットを、例えば、人間の腕を下から支持してその動きを補助するような介護用ロボットとして使用する場合、次のような問題を生じる。すなわち、力覚センサで検出しうる力の閾値を大きく設定した場合、その閾値を超える大きな力を加えなければその外力を検出することができない。ところが、被介護者には、通常そのような大きな力が備わっていないため、結果としてそのロボットを駆動させることができない。一方、力覚センサで検出しうる力の閾値を小さく設定した場合は、被介護者の力に対応した小さな力を検出できるものの、今度は被介護者の腕に震えが生じた場合や、もしくは、外部からノイズが入り込んだ場合、これに敏感に反応してしまってロボットの動きが不自然なものになってしまう。このため、従来のインピーダンス制御では、使用状態に対応して力覚センサの閾値を設定するのが非常に困難であった。
【0008】
また、従来のインピーダンス制御では、ロボットの慣性係数M、粘性係数D、剛性係数Kの値を大きく設定すると、アームの動きが重くなるため、ロボットアームの先端に大きな力を加えなければアームを駆動できない。このため、被介護者のような力の弱い者ではこのアームを駆動させることができなくなる。一方、これらの値を小さく設定すると、小さな力やノイズにアームが敏感に反応してしまうという問題を有していた。
【0009】
さらに、別の問題点として、ロボットアームの先端を高い剛性を持って人間が保持した場合、インピーダンス制御特有の問題として、ロボットのアームに振動を生じさせてしまうという問題が存在する。これを解決すべく、従来では、ロボットの慣性係数M、粘性係数Dの値を大きく設定して、ロボットアームの動きに重い特性や硬い特性を持たせるようにしているが、このようにすれば、大きな外力を加えなければロボットアームを駆動できなくなり、被介護者用のロボットとしては不適切なものになるという問題を生じていた。
【0010】
そこで、本発明は上記課題に着目してなされたもので、力覚センサで検出できる力の閾値に依存することなく、また、慣性係数Mや粘性係数Dを大きく設定した場合であってロボットアームを好適に駆動制御できるようなロボットのインピーダンス制御方法などを提供することを目的とする。
【0011】
【課題を解決するための手段】
本発明は、上記課題を解決するために、ロボット側に、複数のアームと、このアームに作用する外部環境の外力を検出する力覚センサと、アームと外部環境との変位を検出する変位検出センサとを具備し、この変位検出センサで検出された変位および前記力覚センサで検出された外力を入力値としてインピーダンス制御を行うように構成したものである。
【0012】
このように構成すれば、例えば、ノイズの影響を受けないように力覚センサの閾値を大きくした場合であっても、閾値を大きくすることによって検出できなくなった小さな力に代わって外部環境の変位を入力するため、小さな力でロボットをインピーダンス制御することができる。また、アームの振動を防止すべく慣性係数Mや粘性係数Dを大きく設定した場合であっても、同様に、外部環境との変位を入力するようにしているため、小さな力によって生ずる変位に対応したロボットをインピーダンス制御することができる。
【0013】
そして、この外部環境との変位を検出する際、外部環境と接触する接触部材を設け、この接触部材を介して入力される外部環境の外力を力覚センサで検出するとともに、この接触部材をアームの先端に対して変位可能に構成し、この接触部材の変位を変位検出センサで検出する。そして、これらの外力や変位を入力値としてインピーダンス制御する。
【0014】
このように構成すれば、外部環境の外力を検出するための接触部材と、外部環境の変位を検出するための接触部材をそれぞれ個別に設ける場合に比べて、簡単な構成で外力や変位を検出することができる。
【0015】
さらに、インピーダンス制御を行う際、外部環境の剛性係数の増大に伴ってロボット側の粘性係数を増大させるようにする。
【0016】
このように構成すれば、例えば、人間とロボットが協働作業をするような場合、人間の固い動きに対応してロボットの動きに硬さを持たせることができ、また、逆に人間の柔らかい動きに対応してロボットの動きに柔らかさを持たせることができる。
【0017】
【発明の実施の形態】
以下、本発明の実施形態について図面を参照して説明する。図1は、本実施形態におけるロボット1およびインピーダンス制御装置2から成るロボットシステム100を示したものであり、図2はそのロボット1のアーム先端10aの拡大図を示したものである。また、図3および図4はインピーダンス制御のブロック図および制御線図を示したものである。
【0018】
このロボット1は、図1および図2に示すように、人間の腕を載置するための載置部材11と、複数の関節14によって接続された複数のアーム10とを備えてなるもので、このアーム10の先端10aに、外部環境の外力を検出する力覚センサ13と、アーム先端10aに対する腕の変位を検出する変位検出センサ12とを設ける。また、周知のように、この関節14内には、各アーム10を移動させるためのアクチュエータを有する。
【0019】
この載置部材11は、人間の肘から手首までの腕部分を載置するための載置台11aと、アーム先端10aに取り付けられたベース部材11cと、これら載置台11aとベース部材11cとを連結する連結部材11bを備える。そして、この載置台11a、連結部材11b、ベース部材11cによって平行リンクを構成している。
【0020】
この載置台11aは、人間の腕の部分を載置するチャネル状の部材によって構成されるもので、人間の腕をベルトなどで拘束することなく上方から自由に腕を載置できるように構成している。そして、その載置台11aと腕との摩擦によって、この載置台11aを動かせるようにしている。
【0021】
ベース部材11cは、この載置台11aに対向して設けられる平面状のもので、その上面に連結部材11bと変位検出センサを設ける。
【0022】
連結部材11bは、載置台11aとベース部材11cとに設けられるもので、載置台11aおよびベース部材11cに回動可能に取り付け、これによって平行リンクを構成する。そして、この回動領域を所定の範囲に規制することによって、載置台11aを所定の範囲内でx方向、y方向、z方向へ変位できるようにしている。
【0023】
変位検出センサ12は、棒状のスティック12aと、このスティック12aの傾動角度を検出しうる図示しないエンコーダをベース12cの内部に備えてなる。そして、そして、このベース12cをベース部材11c上に固定して取り付けるとともに、そのスティック12aの先端部12bを載置台11aの裏側に回動可能に取り付ける。そして、載置台11aの変位に伴ってそのスティック12aを傾動変位させ、載置台11a上の腕の変位をx方向、y方向、z方向に検出する。
【0024】
一方、力覚センサ13は、ベース部材11cとアーム先端10aとの間に設けられ、載置台11aを介して入力された外部環境のx方向、y方向、z方向の外力を検出する。この力覚センサ13は、本実施形態ではx方向、y方向、z方向の外力を検出するものであるが、さらにx軸回り、y軸回り、z軸回りのトルクも加えた検出を行えるようなものを用いても良い。
【0025】
一方、インピーダンス制御装置2は、パーソナルコンピュータやサーボドライバなどを具備してなるもので、内蔵するCPUやメモリ、およびキーボードなどの入力手段などを用いて、図3に示す変位検出手段20、外力検出手段21、パラメータ設定手段22、演算手段23、制御手段24を機能させる。
【0026】
変位検出手段20は、載置部材11に取り付けられた変位検出センサ12からの信号に基づいてスティック12の先端部12bの座標位置を検出する。この検出は、あらかじめサンプリング時間を設定し、このサンプル時間毎に変位検出センサ12のエンコーダの変位角度θi(i=x、y、z)を読み出すことによって行う。そして、これによりスティック先端部12bの座標p0
【0027】
x軸方向;p0=Lsinθx+p (式2)
y軸方向;p0=Lsinθy+p (式3)
z軸方向;p0=Lcosθz+p (式4)
【0028】
を算出する。なお、ここでLはスティック12aの長さであり、pはアーム先端10aの座標であって初期状態で設定された座標もしくは、ロボット1の制御中において演算によって求められる座標である。
【0029】
外力検出手段21は、アーム先端10aに設けられた力覚センサ13からの入力信号に基づいて外部環境の外力を検出する。この外力の検出についても同様に、あらかじめサンプリング時間を設定し、このサンプリング時間毎に力覚センサ13の信号を読み出して、x軸方向、y軸方向、z軸方向の外力Fi(i=x、y、z)を検出する。この力覚センサ13で検出できる外力の閾値は、ノイズの影響によるロボット1の誤動作を防止できる程度の大きさに設定される。
【0030】
パラメータ設定手段22は、インピーダンス制御に用いられる慣性係数M、粘性係数D、剛性係数Kなどのパラメータを設定するもので、後述する式9の慣性係数M、粘性係数D、剛性係数Kなどを設定する。このパラメータの設定は、パーソナルコンピュータのキーボードを用いて入力され、もしくは、外部環境のロボットへの作用状態に対応して設定される。このロボットへの作用状態に対応するパラメータの設定方法としては、例えば、外部環境をバネとみなしてその剛性係数Khを算出し、その剛性係数Khに比例してロボット1側の粘性係数Dを設定する方法などが考えられる。このパラメータの設定方法に関して詳述する。
【0031】
まず、外部環境がロボット1に外力を加える場合、その外部環境の力の平衡点(外力がゼロとなる座標)は常に移動するため、外部環境を、平衡点の移動するバネとみなして、
【0032】
F(t)=Kh(p(t)―p1(t)) (式5)
【0033】
と仮定する。なお、ここでFは外部環境の外力、p1は外部環境の平衡点である。また、pは外部環境とロボットの接触位置における座標であり、スティック12aの先端部12bの座標である。
【0034】
ところで、外部環境が低速で変位する場合、サンプリング時間内においては、平衡点の移動は微少範囲にとどまると仮定することができるため(p1(t)≒p1(t−ts))、隣接サンプリング時間における平衡点の移動を無視することができる。よって、時刻tにおける式5から時刻(t−ts)における式5を引くことにより、
【0035】
ΔF(t)=KhΔp(t) (式6)
【0036】
なる関係式が得られる。これにより、外部環境の平衡点の項p1(t)を消去し、外部環境の剛性係数Khを推定する。
【0037】
一方、外部環境が高速に変位する場合、サンプリング時間における平衡点の移動を無視することができないため、アーム先端10aの速度vを考慮した式
【0038】
Δp(t)=p(t)―p(t−ts)―tsv(t−ts) (式7)
【0039】
を用いる。なお、このpについては、ロボット1のコンプライアンスを考慮するようにしても良く、この場合、式7のpは下式のp*に置換される。
【0040】
p*(t)=p(t)+Cend(t)F(t) (式8)
(Cend(t);ロボット1のコンプライアンス行列)
【0041】
そして、式6を用いて逐次最小二乗法などで外部環境の剛性係数Khを推定する。
【0042】
そして、このようにして得られた外部環境の剛性係数Khに対応してロボットの粘性係数を変化させる場合、図5に示すように、外部環境の剛性係数Khとロボットの粘性係数Dにあらかじめ比例関係を持たせて記憶しておき、これによって剛性係数の増加に伴った粘性係数Dを算出する。
【0043】
このようにすれば、例えば、人間がロボット1に支持されながら重量物を保持するような場合、人間がしっかりとその運搬物を持つ(Khが増大した状態)ことでロボット1側にもその動きに対応した硬さ(粘性係数Dが増大した状態)を持たせることができ、また、逆に、軽量物を軽く保持する(Khが減少した状態)ような場合、人間側のしなやかな運動に伴ってロボット1側もしなやかさ(粘性係数Dが減少した状態)を持たせることができる。
【0044】
演算手段23は、このように変位検出手段20によって検出されたスティック先端部12bの座標および外力検出手段21によって検出された外力を入力値として、また、パラメータ設定手段22によって設定された慣性係数M、粘性係数D、剛性係数Kを用いてアーム先端10aの位置p、速度p’、加速度p”を演算する。この演算は、インピーダンス特性の微分方程式である下記の式9を用いて行われる。
【0045】
Mp”+Dp’+K(p−p0)=F (式9)
【0046】
制御手段24は、このように算出された速度p’に関する信号をサーボドライバを介してアクチュエータに出力し、フェードバック制御によってこの算出された位置pにアーム先端10aを移動させるように制御する。
【0047】
次に、ロボット1の制御方法について図4の制御線図を用いて説明する。
【0048】
まず、ロボット1を制御するに際して、あらかじめ、パーソナルコンピュータの入力手段などを用いてインピーダンス制御の際の慣性係数M、粘性係数D、弾性係数Kを設定しておく。そして、この状態で載置部材11に人間の腕を載置し、パーソナルコンピュータからの指令によって、サンプリング時間毎に変位検出センサ12の変位値および力覚センサ13の外力を検出する。そして、これらの変位値および外力を入力値とし、式9用いて、アーム先端10aの位置p、速度p’、加速度p”を算出する。そして、この算出された速度p’をサーボドライバを介してアクチュエータに出力し、アーム先端10aの位置をその算出された位置pに移動させるようフィードバック制御する。この制御においては、インピーダンス特性の微分方程式を用いているため、(p−p0)の項がゼロに近づくようにアーム先端10aが移動する。すなわち、スティック12aの角度θi(i=x、y、z)がゼロとなるようにアーム先端10aが動き、これによって、人間の腕の動きに追従するようになる。
【0049】
このように本実施形態によれば、インピーダンス制御を用いたロボット1の制御方法において、従来のように力覚センサ13で検出される外力だけを入力値とするのではなく、変位検出センサ12で検出される外部環境とアーム先端12aとの変位も入力値として用いるようにしたので、力覚センサ13で検出しうる外力の閾値を大きく設定した場合であっても、変位検出センサ12で変位を検出させ、その変位をゼロに近づけるようにアームを駆動することができるようになる。これにより、小さな力でロボット1をインピーダンス制御することができ、しかも、力覚センサ13へ入り込むノイズの影響を少なくすることができる。また、アームの振動を防止するために慣性係数Mや粘性係数Dを大きく設定した場合であっても、同様に、外部環境との変位を入力するようにしているため、小さな力でロボットをインピーダンス制御することができる。
【0050】
また、この実施形態では、載置部材11aを介して外部環境の外力とその変位を検出するようにしたので、それぞれの力覚センサ13および変位検出センサ12毎に別個の接触部材を設けて外力や変位を検出する場合に比べて、簡単な構成でその外力や変位を検出することができる。また、単一の載置部材11aを介して外部環境の同一部位からの外力と変位を検出するので、それぞれ対応のとれた外力と変位を用いてインピーダンス制御することができる。
【0051】
さらに、この実施形態では、ロボット1側の粘性係数Dを設定するに際して、外部環境の剛性係数Khを算出し、その剛性係数Khに比例するような粘性係数Dを用いるようにしたので、人間の固い動きに対応してロボット1側にも固い動きを持たせることができ、また、逆に人間の柔らかい動きに対応してロボット1側にも柔らかい動きを持たせることができる。
【0052】
なお、本発明は上記実施形態に限定されることなく、種々変更して実施することができる。
【0053】
例えば、上記実施形態では、変位検出センサ12として長さの伸縮しないスティック12aを用いたものを例に挙げて説明したが、これに限らず、スティック12aの長さが伸縮するものを用いて同様の構成を実現することができる。この場合、そのスティックの内部に伸縮するバネとその伸縮長さを検出するフォトセンサを設け、エンコーダとともにこの検出した伸縮した長さに関する情報を用いてスティック先端部の座標を検出すると良い。そして、上記実施形態の平行リンクである載置部材11に代えて、その伸縮するスティックの上に別の載置台を設け、これにより外部環境の変位を検出する。
【0054】
また、上記実施形態では、棒状のスティック12aを有する変位検出センサ12を用いて説明したが、これに限らず、x方向、y方向、z方向への変位を検出できるような構成であればどのような構成であっても良い。例えば、表面を露出させたボールを外部環境に接触させて、x方向、y方向の変位を検出できるようにするとともに、このボールをz方向へも変位させてそのz方向の変位も検出できるようにしても良い。
【0055】
また、本実施形態では、介護用のロボット1として外部環境である人間の腕を支持するようなアプリケーションを例に挙げて説明したが、これに限らず、インピーダンス制御の入力として外力と変位を好適に使用できるものであれば、どのようなアプリケーションに利用しても良い。
【0056】
【発明の効果】
本発明では、ロボット側に、複数のアームと、アームの先端に作用する外部環境の外力を検出する力覚センサと、アームの先端に対する外部環境の変位を検出する変位検出センサとを設け、この変位検出センサで検出された変位および前記力覚センサで検出された外力を入力値としてロボットをインピーダンス制御するように構成したので、力覚センサで検出できる閾値を大きく設定した場合であっても、小さな力でロボットをインピーダンス制御することができる。また、アームの振動を防止すべく慣性係数Mや粘性係数Dを大きく設定した場合であっても、同様に、外部環境との変位を入力するようにしているため、小さな力によって生ずる変位に対応したロボットをインピーダンス制御することができる。
【図面の簡単な説明】
【図1】本実施の形態におけるロボットシステムの概観図
【図2】同形態におけるアーム先端近傍の拡大図
【図3】同形態におけるブロック図
【図4】同形態における制御線図
【図5】ロボット側の粘性係数と外部環境の剛性係数との関係を示す図
【符号の説明】
1・・・ロボット
2・・・インピーダンス制御装置
10・・・アーム
10a・・・アーム先端
12・・・変位検出センサ
13・・・力覚センサ
24・・・制御手段
100・・・ロボットシステム
Claims (6)
- 複数のアームと、このアームの先端に作用する外部環境の外力を検出する力覚センサとを具備してなるロボットと、このロボットをインピーダンス制御するインピーダンス制御装置を備えたロボットシステムにおいて、
前記ロボットに、アームの先端に対する外部環境の変位を検出する変位検出センサを設け、この変位検出センサで検出された変位および前記力覚センサで検出された外力を入力値として前記ロボットをインピーダンス制御することを特徴とするロボットシステム。 - さらに、外部環境に接触する接触部材を設け、この接触部材を介して入力される外部環境の外力を前記力覚センサで検出するとともに、この接触部材をアームの先端に対して変位可能に構成し、この接触部材の変位を前記変位検出センサで検出する請求項1に記載のロボットシステム。
- 前記制御手段が、外部環境の剛性係数の増大に伴って増大する粘性係数を用いてインピーダンス制御するものである請求項1に記載のロボットシステム。
- 複数のアームと、このアームの先端に作用する外部環境の外力を検出する力覚センサと、アームの先端に対する外部環境の変位を検出する変位検出センサと、を具備してなるロボットを制御するロボットのインピーダンス制御方法において、
前記変位検出センサで検出された変位および力覚センサで検出された外力を入力値として前記ロボットをインピーダンス制御することを特徴とするロボットのインピーダンス制御方法。 - 前記ロボットが、さらに、外部環境に接触する接触部材を設けるものであり、この接触部材を介して入力される外部環境の外力を前記力覚センサで検出するとともに、この接触部材をアームの先端に対して変位可能に構成し、この接触部材の変位を前記変位検出センサで検出する請求項4に記載のロボットのインピーダンス制御方法。
- 前記制御が、外部環境の剛性係数の増大に伴って増大する粘性係数を用いてインピーダンス制御するものである請求項4に記載のロボットのインピーダンス制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003157047A JP2004358575A (ja) | 2003-06-02 | 2003-06-02 | ロボットシステム、ロボットのインピーダンス制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003157047A JP2004358575A (ja) | 2003-06-02 | 2003-06-02 | ロボットシステム、ロボットのインピーダンス制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004358575A true JP2004358575A (ja) | 2004-12-24 |
Family
ID=34050941
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003157047A Pending JP2004358575A (ja) | 2003-06-02 | 2003-06-02 | ロボットシステム、ロボットのインピーダンス制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004358575A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007075974A (ja) * | 2005-09-16 | 2007-03-29 | Doshisha | インピーダンス制御によって制御されるロボット |
| WO2009147832A1 (ja) * | 2008-06-06 | 2009-12-10 | パナソニック株式会社 | ロボット、ロボットの制御装置、制御方法、及び制御プログラム |
| JP2011230257A (ja) * | 2010-04-28 | 2011-11-17 | Yaskawa Electric Corp | ロボットキャリブレーション装置及びキャリブレーション方法 |
-
2003
- 2003-06-02 JP JP2003157047A patent/JP2004358575A/ja active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007075974A (ja) * | 2005-09-16 | 2007-03-29 | Doshisha | インピーダンス制御によって制御されるロボット |
| WO2009147832A1 (ja) * | 2008-06-06 | 2009-12-10 | パナソニック株式会社 | ロボット、ロボットの制御装置、制御方法、及び制御プログラム |
| JP4634541B2 (ja) * | 2008-06-06 | 2011-02-16 | パナソニック株式会社 | ロボット、ロボットの制御装置、制御方法、及び制御プログラム |
| US8401702B2 (en) | 2008-06-06 | 2013-03-19 | Panasonic Corporation | Robot, and control apparatus, control method, and control program for robot |
| CN102026783B (zh) * | 2008-06-06 | 2013-03-27 | 松下电器产业株式会社 | 机器人、机器人的控制装置、控制方法及控制程序 |
| JP2011230257A (ja) * | 2010-04-28 | 2011-11-17 | Yaskawa Electric Corp | ロボットキャリブレーション装置及びキャリブレーション方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7375754B2 (ja) | 制御装置、制御方法、及び制御システム | |
| CN111930230B (zh) | 姿态检测方法、可穿戴设备及计算机可读存储介质 | |
| JP4595727B2 (ja) | 外力推定システム及び外力推定方法、並びにコンピュータ・プログラム | |
| US8463433B2 (en) | Control system, control method, and robot apparatus | |
| US20200348757A1 (en) | Force sensors for haptic surfaces | |
| JPWO2014129110A1 (ja) | ロボット、ロボットの制御装置及び制御方法、並びに、ロボット用制御プログラム | |
| JP3742879B2 (ja) | ロボットアーム・ハンド操作制御方法、ロボットアーム・ハンド操作制御システム | |
| JP5467291B2 (ja) | 省エネルギー型ロボット関節駆動制御システム | |
| JP3937108B2 (ja) | ロボットの制御方法およびロボット | |
| JPH0741560B2 (ja) | マスター・スレーブロボットの制御方法 | |
| JP2004358575A (ja) | ロボットシステム、ロボットのインピーダンス制御方法 | |
| JP5905840B2 (ja) | 触覚センサシステム、軌道取得装置、及び、ロボットハンド | |
| Caffaz et al. | The dist-hand, an anthropomorphic, fully sensorized dexterous gripper | |
| JP2001265522A (ja) | 爪に装着するセンサ | |
| JP2004223663A (ja) | インピーダンス制御装置、およびインピーダンス制御プログラム | |
| Kaneko et al. | Vision-based active sensor using a flexible beam | |
| Choi et al. | Development of the Cartesian arm exoskeleton system (CAES) using a 3-axis force/torque sensor | |
| JP4578365B2 (ja) | インピーダンス制御によって制御されるロボット | |
| US20190389052A1 (en) | Control apparatus, robot, and robot system | |
| JP2001344053A (ja) | 操作入力装置 | |
| JPWO2017026045A1 (ja) | ハンド力覚計測装置、ハンド力覚計測方法、及びハンド力覚計測プログラム | |
| Iwamoto et al. | Finger ring device for tactile sensing and human machine interface | |
| Nelson et al. | Integrating force and vision feedback within virtual environments for telerobotic systems | |
| CN114905514A (zh) | 一种用于外肢体抓握控制的人体技能学习方法及系统 | |
| JP3164648B2 (ja) | 接触式倣いセンサ装置 |