JP2004363399A - 電子部品のダイボンディング方法及びダイボンディング装置 - Google Patents
電子部品のダイボンディング方法及びダイボンディング装置 Download PDFInfo
- Publication number
- JP2004363399A JP2004363399A JP2003161156A JP2003161156A JP2004363399A JP 2004363399 A JP2004363399 A JP 2004363399A JP 2003161156 A JP2003161156 A JP 2003161156A JP 2003161156 A JP2003161156 A JP 2003161156A JP 2004363399 A JP2004363399 A JP 2004363399A
- Authority
- JP
- Japan
- Prior art keywords
- chip
- base
- positioning
- electronic components
- mounting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10W—GENERIC PACKAGES, INTERCONNECTIONS, CONNECTORS OR OTHER CONSTRUCTIONAL DETAILS OF DEVICES COVERED BY CLASS H10
- H10W72/00—Interconnections or connectors in packages
- H10W72/01—Manufacture or treatment
- H10W72/0198—Manufacture or treatment batch processes
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10W—GENERIC PACKAGES, INTERCONNECTIONS, CONNECTORS OR OTHER CONSTRUCTIONAL DETAILS OF DEVICES COVERED BY CLASS H10
- H10W72/00—Interconnections or connectors in packages
- H10W72/071—Connecting or disconnecting
- H10W72/0711—Apparatus therefor
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10W—GENERIC PACKAGES, INTERCONNECTIONS, CONNECTORS OR OTHER CONSTRUCTIONAL DETAILS OF DEVICES COVERED BY CLASS H10
- H10W74/00—Encapsulations, e.g. protective coatings
- H10W74/10—Encapsulations, e.g. protective coatings characterised by their shape or disposition
- H10W74/15—Encapsulations, e.g. protective coatings characterised by their shape or disposition on active surfaces of flip-chip devices, e.g. underfills
Landscapes
- Die Bonding (AREA)
Abstract
【課題】高価な画像処理システムを使用することなく簡単な装置構成で二つの電子部品の相対位置を保持した状態でベースに実装可能とする電子部品のダイボンディング方法を提供する。
【解決手段】マウント側に設けられたベース22を位置出した後、アライメント側に設けられたチップ位置出し機構部1のそれぞれの位置決めブロック7、8上に半導体レーザチップ5及びフォトディテクタチップ6を載置する。そして、チップ位置出し機構部1により半導体レーザチップ5を位置出しした後、この半導体レーザチップ5を基準としてフォトディテクタチップ6を、該チップ位置出し機構部1により所定の相対位置となるように位置出しを行い、位置出しされた両チップを同時に吸着して、アライメント側からマウント側へ移送し、これら二つの半導体レーザチップ5及びフォトディテクタチップ6を同時に前記ベース22に実装させる。
【選択図】 図5
【解決手段】マウント側に設けられたベース22を位置出した後、アライメント側に設けられたチップ位置出し機構部1のそれぞれの位置決めブロック7、8上に半導体レーザチップ5及びフォトディテクタチップ6を載置する。そして、チップ位置出し機構部1により半導体レーザチップ5を位置出しした後、この半導体レーザチップ5を基準としてフォトディテクタチップ6を、該チップ位置出し機構部1により所定の相対位置となるように位置出しを行い、位置出しされた両チップを同時に吸着して、アライメント側からマウント側へ移送し、これら二つの半導体レーザチップ5及びフォトディテクタチップ6を同時に前記ベース22に実装させる。
【選択図】 図5
Description
【0001】
【発明の属する技術分野】
本発明は、例えば電子部品のダイボンディング方法及びダイボンディング装置に関する。詳しくは、高価な画像処理システムなどを使用することなく、二つの電子部品の位置関係を高精度に保って簡単な方法で実装可能とする実装技術に関する。
【0002】
【従来の技術】
例えば、光学ピックアップ装置を製造するに際しては、半導体レーザチップとフォトディテクタチップとはそれらの相対位置関係が非常に重要であり、これらの相対位置を高精度に位置決めしてベースにダイボンディングする高度な実装技術が要求される。
【0003】
図6は従来のダイボンディング方法の一例を示すフローチャートであり、図7はそのダイボンディング方法で使用されるダイボンディング装置の一例を示す装置構成図である。
【0004】
ダイボンディング装置は、図7に示すように、ベースに実装する前に半導体チップの位置調整を行うアライメント側の第1実装機101と、位置調整された半導体チップをベースに実装するマウント側の第2実装機102と、アライメント側とマウント側との間を移動し且つ上下方向に移動自在なバキュームヘッド103とから構成される。
【0005】
第1実装機101は、X方向及びY方向に移動自在で且つ面内方向(水平方向)に回転自在なXYθステージ104と、このXYθステージ104上に配置されたチップセット部105と、このチップセット部105上に載置された半導体レーザチップ又はフォトディテクタチップである半導体チップ106の載置位置を撮影する第1CCDカメラ107とから構成される。
【0006】
第2実装機102もほぼ同様の構成であり、X方向及びY方向に移動自在で且つ面内方向に回転自在なXYθステージ108と、このXYθステージ108上に配置されたベース109と、このベース109のチップ実装面に塗布された銀ペースト110上に置かれた半導体チップ106の載置位置を撮影する第2CCDカメラ111とから構成される。
【0007】
バキュームヘッド103は、アライメント側の第1実装機101とマウント側の第2実装機102との間を移動し且つ上下方向に昇降動自在とされている。かかるバキュームヘッド103は、真空吸着によって半導体チップ106をその先端面に吸引保持し、該半導体チップ106をチップセット部105の載置面に置くと共に、位置決めされた半導体チップ106を再び吸着させてマウント側に移送(移載)させ、該半導体チップ106をベース109のチップ実装面に載置させる。そして、このバキュームヘッド103は、半導体チップ106の位置合わせが終了したら、ベース109毎吸引してこのベース109をキュア工程に移送させるように動作する。
【0008】
前記したダイボンディング装置を用いて半導体レーザチップとフォトディテクタチップを同一のベース109上に所定の相対位置として実装するには、図6のフローチャートに示すように、先ずステップS1の工程で、第2実装機102のXYθステージ108上にベース109をセットする。次に、ステップS2の工程で、ベース109をXYθステージ108によって所定状態となるように位置出しを行う。
【0009】
次に、ステップS3の工程で、半導体チップ106を実装させるベース109のチップ実装面上に銀ペースト110を塗布する。続いて、ステップS4の工程で、第1実装機101のチップセット部105上に例えば半導体レーザチップ(図6ではチップ1と表記してある)である半導体チップ106を載せる。そして、次のステップS5の工程では、第1CCDカメラ107によって半導体チップ106の前記チップセット部105に対する実装位置を撮影し、その実装位置をモニターで確認しながら当該半導体チップ106が所定の状態となるようにXYθステージ104を使用して位置出しを行う。
【0010】
次に、ステップS6の工程では、位置出しが終了した半導体チップ106をバキュームヘッド103で吸引保持させる。そして、次のステップS7の工程では、バキュームヘッド103に吸引保持した半導体チップ106をマウント側まで移送させた後、第2CCDカメラ111により半導体チップ106のチップ実装面に対する実装位置を撮影してその実装位置をモニターで確認しながら当該半導体チップ106が所定の状態となるようにXYθステージ108を使用して位置出しを行う。
【0011】
次に、ステップS8の工程では、バキュームヘッド103によってXYθステージ108からベース109毎吸引させて、このベース109をキュア工程へと移送させる。そして、ステップS9の工程で、取り出したベース109の銀ペースト110を熱処理して半導体チップ106をベース109のチップ実装面に固定させる。
【0012】
次に、ステップS10の工程において、半導体レーザチップを実装させたベース109を再び第2実装機102のXYθステージ108上にセットする。そして、次のステップS11の工程では、前記ベース109に実装させた半導体チップ106を基準として、当該ベース109をXYθステージ108により所定状態となるように位置出しを行う。
【0013】
次に、ステップS12の工程で、フォトディテクタチップを実装させるベース109のチップ実装面上に銀ペースト110を塗布する。続いて、ステップS13の工程で、チップセット部105上にフォトディテクタチップ(図6ではチップ2と表記してある)である半導体チップ106を載せる。そして、次のステップS14の工程では、第1CCDカメラ107によって半導体チップ106の前記チップセット部105に対する実装位置を撮影し、その実装位置をモニターで確認しながら当該半導体チップ106が所定の状態となるようにXYθステージ104を使用して位置出しを行う。
【0014】
次に、ステップS15の工程では、位置出しが終了した半導体チップ106をバキュームヘッド103で吸引保持させる。そして、次のステップS16の工程では、バキュームヘッド103に吸引保持した半導体チップ106をマウント側まで移送させた後、第2CCDカメラ111により半導体チップ106のチップ実装面に対する実装位置を撮影してその実装位置をモニターで確認しながら先に実装した半導体チップ106に対して所定の相対的位置となるように前記半導体チップ106をXYθステージ108によって位置出しする。
【0015】
次に、ステップS17の工程では、バキュームヘッド103によってXYθステージ108からベース109毎吸引させて、このベース109をキュア工程へ移送させる。そして、ステップS18の工程で、取り出したベース109上の銀ペースト110を熱処理して半導体チップ106をベース109のチップ実装面に固定させる。これで、半導体レーザチップとフォトディテクタチップの二つの半導体チップ106のベース109に対するダイボンディングが終了する。
【0016】
この他、半導体チップを位置決めして所定の位置に実装させる技術としては、例えば、寸法形状の異なる数種類の半導体チップを制御部で判断して所望の半導体チップを移送機構部にてチップ位置決め部に移送し、そのチップ位置決め部に設けた逆多角錐形状の窪みに半導体チップを挿入させ、この窪みに半導体チップを収容させることによって該半導体チップの位置決めを行い、さらにボンディングツールでこの窪みから半導体チップを取り出し、搭載部に設けた基板の所定位置に実装させる技術が知られている(例えば、特許文献1など参照)。
【0017】
また、この他、半導体ウエハからベアチップを取り出し、該ベアチップを検査台上に移送させて検査機構にてチップ状態を検査した後、ボンディングヘッドでベアチップを吸着して検査位置から実装基板上へと移動させ、実装部でベアチップをボンディングさせるために、半導体ウエハを複数配置させた数台の載置台と、実装基板上にベアチップを実装させる実装機構を複数台設けた装置が知られている(例えば、特許文献2など参照)。
【0018】
さらに、この他、リードフレーム供給部からリードフレームを搬送部へと供給し、該搬送部で寸法形状の異なる半導体素子に対応した複数個の半田供給装置の中からその大きさに応じた半田供給装置を使用して半田材を供給させた後、その半田材の上に、同様に寸法形状の異なる半導体素子に対応して設けた数種類のチャックの中から適切なチャックを使用して半導体素子を位置決め部に搬送させ、位置決めを行った後、半導体素子を接合部に搬送してリードフレーム上に実装させる半導体製造装置が知られている(例えば、特許文献3など参照)。
【0019】
【特許文献1】
特開平3−219647号公報(第5頁及び第6頁、図1〜図4)
【特許文献2】
特開2001−150255号公報(第3頁及び第4頁、図1及び図2)
【特許文献1】
特開平4−76926号公報(第4頁〜第6頁、図1〜図4)
【0020】
【発明が解決しようとする課題】
ところで、前記した図6のフローチャートで示すチップ実装方法では、半導体レーザチップとフォトディテクタチップは、それぞれ別工程で1個づつ位置決めを行った後にベース109にダイボンディングされている。このため、半導体レーザチップとフォトディテクタチップの相対位置関係を高精度にするためには、それぞれの実装工程にて高価な画像処理システムや高精度位置決め機構や高精度移送機構が必要となる。その結果、ダイボンディング装置が複雑な構造となり、また価格も非常に高くなってしまい、ダイボンディング装置の運営、維持、管理も面倒なものとなる。
【0021】
特に、図6のフローチャートで示す各工程にて半導体チップ106を実装する場合は、半導体レーザチップとフォトディテクタチップのダイボンディング工程が分かれているため、それぞれのダイボンディング工程の後に銀ペースト110などの接着剤を恒温槽にて硬化させる必要があり、リードタイムが長くなり、また、それぞれの工程が増えるので作業時間が長くなるという課題がある。
【0022】
そこで、本発明は、このような課題に鑑みてなされたものであり、高価な画像処理システムを使用することなく簡単な装置構成で二つの電子部品の相対位置を高精度に保持した状態で実装可能とし、さらには、電子部品実装後のキュア工程を1回で行うことができ、リードタイムの短縮を図ることのできる電子部品のダイボンディング方法及びダイボンディング装置を提供することを目的とする。
【0023】
【課題を解決するための手段】
本発明の電子部品のダイボンディング方法は、二つの電子部品の相対位置が出された状態を保持させた状態で、各位置決めブロック上の二つの電子部品を同時に吸着する工程と、吸着保持した二つの電子部品を、チップの位置出しを行うアライメント側からチップの実装を行うマウント側へ移送し、これら二つの電子部品を同時にベースに形成した各チップ実装面に実装する工程とを備えている。
【0024】
本発明の電子部品のダイボンディング方法によれば、二つの電子部品の相対位置を位置出しした後に、その相対位置を保持させた状態でこれら二つの電子部品を同時に吸着してアライメント側からマウント側に移送させ、これら電子部品を同時にベースの各チップ実装面に実装させていることから、二つの電子部品の相対位置を精度良く保った状態での実装が行え、しかも1回の実装工程で済むことになり、製造工程が大幅に短縮される。
【0025】
また、本発明のダイボンディング装置は、チップの位置出しを行うアライメント側に設けられた、二つの電子部品の相対位置を位置出しするチップ位置出し機構部と、相対位置が出された二つの電子部品を同時に吸着する吸着ヘッドと、電子部品をそれぞれの位置に実装させるチップ実装面を有したベースを、前記アライメント側と離れたマウント側に設けられたベース位置出し手段上に載置し、チップ実装面がマウント基準位置となるように該ベース位置出し手段によって前記ベースを位置出しするベース位置出し機構部と、電子部品を吸着させた吸着ヘッドを、アライメント側からマウント側へ移送させて前記ベースへと下降させ、当該吸着ヘッドに吸着させた二つの前記電子部品を同時に各チップ実装面に載置させる移送機構部とを備える。
【0026】
本発明のダイボンディング装置によれば、チップ位置出し機構部によって相対位置を出した二つの電子部品を、吸着ヘッドで同時に吸着し、その相対位置関係を保持させた状態でアライメント側からマウント側へ移送機構部によって移送し、これら二つの電子部品を同時にベース位置出し機構部上に設けたベースの各チップ実装面に載置させると、その精度が保持されたままの状態でベースに電子部品が実装されることなる。このため、二つの電子部品を1回の実装工程で実装し得ることが可能となりる。
【0027】
【発明の実施の形態】
以下、本発明を適用した具体的な実施の形態について図面を参照しながら詳細に説明する。本実施の形態は、光学ピックアップ装置を構成する、二つの電子部品である半導体レーザチップとフォトディテクタチップの相対位置を高精度なものとしてチップ実装基台であるベースに実装可能とするダイボンディング方法と、その方法を実現するダイボンディング装置に、本発明を適用したものである。
【0028】
[ダイボンディング装置の構成]
先ず、ダイボンディング装置の構成を図面を参照して説明する。図1はダイボンディング装置の全体を示す正面図であり、図2はチップ位置出し機構部に設けられたチップ位置出し手段を示し、(a)は位置決めブロック上に電子部品が載置された状態を示す平面図、(b)はチップ位置出し手段を示す平面図である。
【0029】
本実施の形態のダイボンディング装置は、半導体レーザチップとフォトディテクタチップの相対位置を位置出しするチップ位置出し機構部1と、このチップ位置出し機構部1により相対位置が出された、これら二つの半導体レーザチップとフォトディテクタチップを同時に吸着する吸着ヘッド2と、半導体レーザチップとフォトディテクタチップをそれぞれの位置に実装させるベースを位置出しするベース位置出し機構部3と、吸着ヘッド2をアライメント側からチップ実装を行うマウント側へ移送させて吸着ヘッド2に吸着させた二つの半導体レーザチップとフォトディテクタチップを同時にベースに載置させるチップ移送機構部4とを備えている。
【0030】
「チップ位置出し機構部」
チップ位置出し機構部1は、図1に示すように、半導体レーザチップ5とフォトディテクタチップ6を載置させるそれぞれの位置決めブロック7、8と、各位置決めブロック7、8上に載置させた半導体レーザチップ5とフォトディテクタチップ6を所定の方向に位置調整可能とするチップ位置出し手段である第1のXYθステージ9及び第2のXYθステージ10と、各位置決めブロック7、8上に載置させた半導体レーザチップ5とフォトディテクタチップ6の載置位置を撮影する第1の撮像手段であるチップ位置決め用カメラ11と、このチップ位置決め用カメラ11の位置を調整可能とする位置出し手段である第1のカメラ調整ステージ12とから構成される。
【0031】
位置決めブロック7、8は、図2に示すように、半導体レーザチップ5及びフォトディテクタチップ6を載置させる載置面7a、8aを有し、それぞれの第1のXYθステージ9及び第2のXYθステージ10上に設けられた支持台13、14の上に固定されている。載置面7a、8aには、半導体レーザチップ5及びフォトディテクタチップ6をそれぞれ位置決めさせる突き当て突起部15、16が設けられている。
【0032】
突き当て突起部15、16は、例えば図2(a)中矢印で示すX方向と、このX方向と直交するY方向の2方向にそれぞれ延びる突き当て部15A,15B、16A,16Bを有した平面略逆L字状のブロックとして形成されている。半導体レーザチップ5とフォトディテクタチップ6は、一つの角部を挟む二つの側壁をそれぞれの突き当て部15A,15B、16A,16Bに突き当てることにより載置面7a、8aに対する位置が決まる。
【0033】
この位置決めブロック7、8には、前記した載置面7a、8aに載置させた半導体レーザチップ5とフォトディテクタチップ6を吸着保持させるための図示しない吸着手段が設けられている。したがって、半導体レーザチップ5及びフォトディテクタチップ6は、それぞれの位置決めブロック7、8に載置されることによって、ある程度位置決めされた状態で前記載置面7a、8aに固定されることになる。
【0034】
第1のXYθステージ9及び第2のXYθステージ10は、図2に示すように、X方向に移動自在なXステージ9a、10aと、このX方向と直交するY方向に移動自在なYステージ9b、10bと、面内方向(θ方向)に回転自在なθステージ9c、10cとからなる。半導体レーザチップ5とフォトディテクタチップ6は、それぞれのチップ中心がX方向で何ミリ、Y方向で何ミリ、θ方向は零度というようにその相対位置が決まっており、予め決められた所定の位置関係となるように、前記第1のXYθステージ9及び第2のXYθステージ10を使用して位置出しがなされる。
【0035】
チップ位置決め用カメラ11は、図1に示すように、各位置決めブロック7、8の上に載置された半導体レーザチップ5及びフォトディテクタチップ6の載置位置を撮影するためのもので、当該位置決めブロック7、8の真上に設けられている。このチップ位置決め用カメラ11には、各位置決めブロック7、8上に載置された半導体レーザチップ5及びフォトディテクタチップ6の載置位置を表示させる画像表示手段であるモニター17が接続されている。そして、このモニター17には、予め決められた半導体レーザチップ5とフォトディテクタチップ6の相対位置(実装位置)を示すXY方向のラインを該モニター17に表示させるライン発生器18が接続されている。
【0036】
第1のカメラ調整ステージ12は、図1に示すように、チップ位置決め用カメラ11を移動自在とする位置出し手段であり、前記第1のXYθステージ9及び第2のXYθステージ10を固定させる架台19に立設した支柱20の先端に設けられた天板21上に固定されている。この第1のカメラ調整ステージ12は、半導体レーザチップ5とフォトディテクタチップ6の相対位置が規定位置に対して長い場合や高さに差がある場合などはチップ位置決め用カメラ11をこれらチップ間で位置合わせする必要があるため、これに応じてチップ位置決め用カメラ11をスライド調整するのに使用される。かかる第1のカメラ調整ステージ12は、図1において左右方向であるX方向と、前後方向であるY方向と、上下方向(位置決めブロック7、8に近接又は離間する方向)であるZ方向にそれぞれ移動自在となっている。
【0037】
ライン発生器18は、モニター17の画面上に、XY方向の直交するラインをいくつか表示させるように構成されている。そして、このモニター17の画面上に表示されたラインを目標にして、チップ位置決め用カメラ11で各位置決めブロック7、8上に載置された半導体レーザチップ5とフォトディテクタチップ6の載置位置を確認しながら前記した第1のXYθステージ9及び第2のXYθステージ10によって、これら半導体レーザチップ5とフォトディテクタチップ6をそれぞれのラインに合わせる。つまり、チップ位置決め用カメラ11で捕らえたチップ画像の基準面を、モニター17の画面上に表示されたラインに一致させるべく、第1のXYθステージ9及び第2のXYθステージ10を使用して調整する。
【0038】
「ベース位置出し機構部」
ベース位置出し機構部3は、図1に示すように、半導体レーザチップ5とフォトディテクタチップ6を実装させるチップ実装面22a、22b(図5参照)を有したベース22と、このベース22を移動自在とするベース位置出し手段である第3のXYθステージ23と、チップ実装面22a、22bを撮影する第2の撮影手段であるベース位置決め用カメラ24と、このベース位置決め用カメラ24の位置を調整可能とする位置出し手段である第2のカメラ調整ステージ25とから構成される。
【0039】
ベース22は、図5に示すように、光学ピックアップ装置のチップ実装基台からなり、半導体レーザチップ5とフォトディテクタチップ6をそれぞれの位置に実装させるチップ実装面22a、22bを有している。このベース22は、後述する第3のXYθステージ23上に配置される。
【0040】
第3のXYθステージ23は、図5に示すように、X方向に移動自在なXステージ23aと、このX方向と直交するY方向に移動自在なYステージ23bと、面内方向(θ方向)に回転自在なθステージ23cとからなる。この第3のXYθステージ23では、Xステージ23a、Yステージ23b及びθステージ23cをそれぞれ動かして、前記チップ実装面22a、22bがマウント基準位置となるように調整される。ここで定義するマウント基準位置とは、各チップ実装面22a、22bに半導体レーザチップ5とフォトディテクタチップ6をそれぞれ実装するに際しての該ベース22に対する各チップの実装すべき基準となる位置を意味する。
【0041】
ベース位置決め用カメラ24は、図1に示すように、前記したベース22のチップ実装面22a、22bを撮影するもので、第3のXYθステージ23上に設けられている。このベース位置決め用カメラ24には、前記各チップ実装面22a、22bを表示画面上に映し出すモニター17が接続されている。
【0042】
第2のカメラ調整ステージ25は、図1に示すように、ベース位置決め用カメラ24を移動自在とする位置出し手段であり、前記第1のカメラ調整ステージ12と同じく前記した天板21上に固定されている。この第2のカメラ調整ステージ25は、第1のカメラ調整ステージ12と同様に、図1中矢印X方向と、Y方向と、Z方向にそれぞれ移動自在となっており、チップ実装面22a、22bをモニター17に映し出して位置調整をする際に使用される。
【0043】
「吸着ヘッド」
吸着ヘッド2は、図3に示すように、チップ位置出し機構部1によって相対位置が出された二つの半導体レーザチップ5及びフォトディテクタチップ6を同時に吸着するヘッドである第1吸着ヘッド26と第2吸着ヘッド27と、半導体レーザチップ5及びフォトディテクタチップ6の位置決めブロック7、8からの取り出し時または各チップ実装面22a、22bへの実装時に、第1吸着ヘッド26及び第2吸着ヘッド27を上方向へ逃がすためのヘッド上下動機構部と、第1吸着ヘッド26と第2吸着ヘッド27の高さ位置を調整するヘッド高さ位置調整機構部と、ヘッド押圧機構部とから構成されている。
【0044】
第1吸着ヘッド26及び第2吸着ヘッド27は、図示を省略する真空吸引手段からのバキュームによって、その先端部に半導体レーザチップ5及びフォトディテクタチップ6を吸着させるようになっている。この第1吸着ヘッド26及び第2吸着ヘッド27には、半導体レーザチップ5及びフォトディテクタチップ6を吸着させる先端部に通じるバキューム通路28が形成されている。
【0045】
ヘッド上下動機構部は、ヘッドベース基板29に設けられたスライドレール30、31を有し、このスライドレール30、31に前記第1吸着ヘッド26及び第2吸着ヘッド27をスライド自在に取り付けることにより、これら第1吸着ヘッド26と第2吸着ヘッド27とを上下動させる。
【0046】
ヘッド高さ位置調整機構部は、ヘッドベース基板29に固定された突き当てブロック32、33と、この突き当てブロック32、33に当接するストッパ部34、35と、このストッパ部34、35の高さ位置を調整する調整部材36、37とから構成され、半導体レーザチップ5とフォトディテクタチップ6の高さの差hを調整自在とする。
【0047】
ストッパ部34、35は、周面にねじ部を有したストレートピン形状として形成され、そのねじ部と螺合する例えばナットからなる調整部材36、37によって、前記第1吸着ヘッド26及び第2吸着ヘッド27の基端側に設けられたストッパ取付アーム38、39にそれぞれ取り付けられている。
【0048】
突き当てブロック32、33は、ヘッドベース基板29に固定されており、前記ストッパ部34、35の先端部がこの突き当てブロック32、33に当接することで、前記第1吸着ヘッド26及び第2吸着ヘッド27の高さ位置を位置決めさせる。
【0049】
ヘッド押圧機構部は、一対のバネ40,41、42,43と、これらバネ40,41、42,43の一端側を固定させるバネ固定部材44,45、46,47とから構成されている。一方のバネ40、42は、第1吸着ヘッド26及び第2吸着ヘッド27を下方へ付勢するように、ストッパ取付アーム38、39の上面とヘッドベース基板29の上方角部近傍に固定されたバネ固定部材44、46との間に設けられている。他方のバネ41、43は、ストッパ取付アーム38、39の下面とヘッドベース基板29の下方角部近傍に固定されたバネ固定部材45、47との間に設けられている。
【0050】
このヘッド押圧機構部は、アライメント側に相対位置が出された半導体レーザチップ5とフォトディテクタチップ6を位置決めブロック7、8上から取り出す時、及び吸着ヘッド2に吸着させた半導体レーザチップ5及びフォトディテクタチップ6をベース22上に実装させる時に、所定の押圧力を持って押し付けるのに使用される。
【0051】
このヘッド押圧機構部では、下方より数グラムの荷重が吸着ヘッド2に掛かると、この吸着ヘッド2を上方向に可動させるように前記したバネ40,41、42,43のばね力が決められている。これにより、半導体レーザチップ5及びフォトディテクタチップ6の位置決めブロック7、8からの取り出し時、及びベース22への実装時に、誤って半導体レーザチップ5及びフォトディテクタチップ6を押し潰すことを防止できる。
【0052】
「チップ移送機構部」
チップ移送機構部4は、図1に示すように、吸着ヘッド2をアライメント側からマウント側に移動自在とするスライドレール48と、このスライドレール48にスライド自在とされる移送機構本体部49と、この移送機構本体部49をスライドレール48に沿って移動自在とするスライド駆動部(図示は省略する)と、移送機構本体部49を上下方向に昇降動させる昇降動機構部(図示は省略する)とからなる。
【0053】
吸着ヘッド2は、移送機構本体部49に固定され、スライド駆動部によって前記スライドレール48に沿ってアライメント側とマウント側との間を移動自在とされている。また、この吸着ヘッド2は、昇降動機構部によって上下方向であるZ方向に昇降動自在とされている。
【0054】
[ダイボンディング方法]
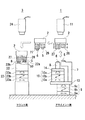
次に、本実施の形態のダイボンディング方法を図面を参照しながら説明する。図4は半導体レーザチップ5及びフォトディテクタチップ6をベース22に実装する工程を示すフローチャートであり、図5は半導体レーザチップ5及びフォトディテクタチップ6をベース22に実装させる一連の工程を示す図である。
【0055】
図4のフローチャートに示すように、先ず、ステップ51の工程で、ベース22を第3のXYθステージ23上にセットする。次に、ステップ52の工程では、ベース22のチップ実装面22a、22bをベース位置決め用カメラ24で撮影し、そのチップ実装面22a、22bの位置をモニター17に表示させる。そして、作業者は、モニター17に映し出されたチップ実装面22a、22bの位置を確認しながら、第3のXYθステージ23を操作して、前記チップ実装面22a、22bがマウント基準位置となるようにベース22を位置出しする。
【0056】
次に、ステップS53の工程では、図5に示すように、各チップ実装面22a、22bに半導体レーザチップ5及びフォトディテクタチップ6を固定させるための銀ペースト50をそれぞれ塗布する。次いで、ステップS54の工程では、図2に示すように、半導体レーザチップ1(図4ではチップ1と表記してある)を一方の位置決めブロック7にセットすると共に、フォトディテクタチップ6(図4ではチップ2と表記してある)を他方の位置決めブロック8にセットする。
【0057】
半導体レーザチップ5及びフォトディテクタチップ6を各位置決めブロック7、8上にセットするには、前記した吸着手段によってこれら半導体レーザチップ5及びフォトディテクタチップ6を吸着させながらX方向及びY方向にそれぞれ延在する突き当て部15A,15B、16A,16Bに、半導体レーザチップ5及びフォトディテクタチップ6の1つの角部を挟む2つの側面をそれぞれ面接触させて突き当てる。これにより、半導体レーザチップ5及びフォトディテクタチップ6の位置決めブロック7、8に対する位置が決まる。
【0058】
次に、ステップS55の工程では、ライン発生器18でモニター17に表示させたXY方向のラインを、予め半導体レーザチップ5とフォトディテクタチップ6とが所定の相対位置となるように設定しておき、このラインにチップ位置決め用カメラ11で撮影した半導体レーザチップ5の画像を合わせる。位置合わせをするには、モニター17上で半導体レーザチップ5自身のX方向、Y方向及びθ方向の位置を確認しながら、この半導体レーザチップ5を第1のXYθステージ9を使用して位置出しをする。
【0059】
次に、ステップS56の工程では、先のステップS55の工程と同じく、モニター17上でフォトディテクタチップ6自身のX方向、Y方向及びθ方向の位置を確認しながら、このフォトディテクタチップ6をモニター17上のラインに合わせて第2のXYθステージ10を使用して位置出しをする。
【0060】
これら半導体レーザチップ5及びフォトディテクタチップ6の位置合わせ時において、二つのチップの相対位置が規定位置よりも長い場合や高さに差がある場合には、第1のカメラ調整ステージ12を使用してチップ位置決め用カメラ11の位置をチップ間で合わせ直す。
【0061】
次に、ステップS57の工程では、吸着ヘッド2を位置決めブロック7、8へと下降させ、相対位置が出された半導体レーザチップ5とフォトディテクタチップ6に対して吸着ヘッド2を前記したバネ40,41、42,43にて数グラムの加圧をしてその先端部に吸着させる。そして、半導体レーザチップ5とフォトディテクタチップ6を吸着ヘッド2に吸着させた後、これら半導体レーザチップ5とフォトディテクタチップ6の前記位置決めブロック7、8への吸着を終了させる。そして、半導体レーザチップ5とフォトディテクタチップ6を位置決めブロック7、8から同時に取り出す。
【0062】
次に、ステップS58の工程では、チップ移送機構部4によって吸着ヘッド2を上昇させた後、スライドレール48に沿ってアライメント側からマウント側に吸着ヘッド2を移動(移載)させる。そして、この吸着ヘッド2を第3のXYθステージ23上にセットしたベース22へと下降させた後、これら半導体レーザチップ5及びフォトディテクタチップ6をベース22上の各チップ実装面22a、22bに所定の押圧力を持って実装させる。
【0063】
このとき、半導体レーザチップ5とフォトディテクタチップ6は予めそれらの相対位置が出されているので、ここでは、単に各チップ実装面22a、22bにチップを実装させるだけで、二つのチップ間の相対位置精度を高精度に維持させることができる。そして、吸着ヘッド2による吸着を終了し、この吸着ヘッド2をチップ移送機構部4によって上昇させる。
【0064】
次に、ステップS59の工程では、二つの半導体レーザチップ5とフォトディテクタチップ6が実装されたベース22を、第3のXYθステージ23から取り外し恒温槽へ移送させてキュアを行う。そして、ベース22上の銀ペースト50を恒温槽にて熱処理することにより、半導体レーザチップ5とフォトディテクタチップ6をそれぞれのチップ実装面22a、22bに固定させる。
【0065】
このように、本実施の形態のダイボンディング方法によれば、相対位置が非常に厳しく管理される半導体レーザチップ5とフォトディテクタチップ6の二つの半導体チップを、チップ位置出し機構部1にて予めそれらの相対位置を出しておき、それらチップを同時に吸着してベース22上に実装させるため、これら二つの半導体レーザチップ5及びフォトディテクタチップ6を1回の実装工程で、その相対位置関係を精度良く保つことができる。したがって、高価な画像処理システムや高精度位置決め機構或いは高精度移送機構が不要となる。
【0066】
また、本実施の形態のダイボンディング方法では、半導体レーザチップ5とフォトディテクタチップ6を同時に位置決めブロック7、8から取り出すと共に同時にベース22に実装させており、また、半導体レーザチップ5及びフォトディテクタチップ6を同時にキュアしているため、リードタイムを大幅に短縮させることができると共に、製造プロセスも大幅に簡略化することができる。
【0067】
以上、本発明を適用した具体的な実施の形態について説明したが、本発明は、上述の実施の形態に制限されることなく種々の変更が可能である。
【0068】
上述した実施の形態では、半導体レーザチップ5とフォトディテクタチップ6の二つの半導体チップを同時にベース22に実装させる例として説明したが、3つ以上の半導体チップの相対位置を予め出しておき、それら相対位置が出された3つ以上の半導体チップを同時にベース22に実装させるようにしてもよい。
【0069】
【発明の効果】
本発明の電子部品のダイボンディング方法によれば、予め少なくとも二つの電子部品の相対位置を出しておいて、その相対位置が出された電子部品を同時にベース上の各チップ実装面に実装させているので、高価な画像処理システムや高精度位置決め機構或いは高精度移送機構を使用することなく、簡単に電子部品の相対位置を高精度に維持させることができる。
【0070】
また、本発明の電子部品のダイボンディング方法によれば、二つの電子部品を1回の実装で実装させることが出来ると共に電子部品実装後に行うキュア工程が1回で済むことから、リードタイムを大幅に短縮させることができると共に製造工程数も減らすことができる。また、半導体レーザチップなどのような熱サイクルを何度もかけたくないチップも1度のキュアで済むため、電子部品の性能を損なうようなことはない。
【0071】
本発明のダイボンディング装置によれば、チップ位置出し機構部によって相対位置を出した二つの電子部品を、吸着ヘッドで同時に吸着し、その相対位置関係を保持させた状態でアライメント側からマウント側へ移送機構部によって移送し、これら二つの電子部品を同時にベース位置出し手段上に設けたベースの各チップ実装面に実装させる装置構成としているので、高価な画像処理システムなどの特別な装置を必要とすることなく、簡単な構造でその相対位置を精度良く保った状態とすることができ、設備投資、加工コスト、メンテナンスコスト、設備設置スペースを低減させることができる。
【図面の簡単な説明】
【図1】図1は、本発明を適用したダイボンディング装置の全体を示す正面図である。
【図2】図2は、チップ位置出し機構部に設けられたチップ位置出し手段を示し、(a)は位置決めブロック上に電子部品が載置された状態を示す平面図、(b)はチップ位置出し手段を示す平面図である。
【図3】図3は、吸着ヘッドの構造を示す正面図である。
【図4】図4は、半導体レーザチップ及びフォトディテクタチップをベースに実装する工程を示すフローチャートである。
【図5】図5は、半導体レーザチップ及びフォトディテクタチップをベースに実装するまでの一連の工程を示す図である。
【図6】図6は、従来のダイボンディング方法の一例を示すフローチャートである。
【図7】図7は、従来のダイボンディング方法で使用されるダイボンディング装置の一例を示す装置構成図である。
【符号の説明】
1…チップ位置出し機構部
2…吸着ヘッド
3…ベース位置出し機構部
4…チップ移送機構部
5…半導体レーザチップ
6…フォトディテクタチップ
7、8…位置決めブロック
9…第1のXYθステージ
10…第2のXYθステージ
11…チップ位置決め用カメラ
12…第1のカメラ調整ステージ
17…モニター
18…ライン発生器
22…ベース
23…第3のXYθステージ
24…ベース位置決め用カメラ
25…第2のカメラ調整ステージ
26…第1吸着ヘッド
27…第2吸着ヘッド
【発明の属する技術分野】
本発明は、例えば電子部品のダイボンディング方法及びダイボンディング装置に関する。詳しくは、高価な画像処理システムなどを使用することなく、二つの電子部品の位置関係を高精度に保って簡単な方法で実装可能とする実装技術に関する。
【0002】
【従来の技術】
例えば、光学ピックアップ装置を製造するに際しては、半導体レーザチップとフォトディテクタチップとはそれらの相対位置関係が非常に重要であり、これらの相対位置を高精度に位置決めしてベースにダイボンディングする高度な実装技術が要求される。
【0003】
図6は従来のダイボンディング方法の一例を示すフローチャートであり、図7はそのダイボンディング方法で使用されるダイボンディング装置の一例を示す装置構成図である。
【0004】
ダイボンディング装置は、図7に示すように、ベースに実装する前に半導体チップの位置調整を行うアライメント側の第1実装機101と、位置調整された半導体チップをベースに実装するマウント側の第2実装機102と、アライメント側とマウント側との間を移動し且つ上下方向に移動自在なバキュームヘッド103とから構成される。
【0005】
第1実装機101は、X方向及びY方向に移動自在で且つ面内方向(水平方向)に回転自在なXYθステージ104と、このXYθステージ104上に配置されたチップセット部105と、このチップセット部105上に載置された半導体レーザチップ又はフォトディテクタチップである半導体チップ106の載置位置を撮影する第1CCDカメラ107とから構成される。
【0006】
第2実装機102もほぼ同様の構成であり、X方向及びY方向に移動自在で且つ面内方向に回転自在なXYθステージ108と、このXYθステージ108上に配置されたベース109と、このベース109のチップ実装面に塗布された銀ペースト110上に置かれた半導体チップ106の載置位置を撮影する第2CCDカメラ111とから構成される。
【0007】
バキュームヘッド103は、アライメント側の第1実装機101とマウント側の第2実装機102との間を移動し且つ上下方向に昇降動自在とされている。かかるバキュームヘッド103は、真空吸着によって半導体チップ106をその先端面に吸引保持し、該半導体チップ106をチップセット部105の載置面に置くと共に、位置決めされた半導体チップ106を再び吸着させてマウント側に移送(移載)させ、該半導体チップ106をベース109のチップ実装面に載置させる。そして、このバキュームヘッド103は、半導体チップ106の位置合わせが終了したら、ベース109毎吸引してこのベース109をキュア工程に移送させるように動作する。
【0008】
前記したダイボンディング装置を用いて半導体レーザチップとフォトディテクタチップを同一のベース109上に所定の相対位置として実装するには、図6のフローチャートに示すように、先ずステップS1の工程で、第2実装機102のXYθステージ108上にベース109をセットする。次に、ステップS2の工程で、ベース109をXYθステージ108によって所定状態となるように位置出しを行う。
【0009】
次に、ステップS3の工程で、半導体チップ106を実装させるベース109のチップ実装面上に銀ペースト110を塗布する。続いて、ステップS4の工程で、第1実装機101のチップセット部105上に例えば半導体レーザチップ(図6ではチップ1と表記してある)である半導体チップ106を載せる。そして、次のステップS5の工程では、第1CCDカメラ107によって半導体チップ106の前記チップセット部105に対する実装位置を撮影し、その実装位置をモニターで確認しながら当該半導体チップ106が所定の状態となるようにXYθステージ104を使用して位置出しを行う。
【0010】
次に、ステップS6の工程では、位置出しが終了した半導体チップ106をバキュームヘッド103で吸引保持させる。そして、次のステップS7の工程では、バキュームヘッド103に吸引保持した半導体チップ106をマウント側まで移送させた後、第2CCDカメラ111により半導体チップ106のチップ実装面に対する実装位置を撮影してその実装位置をモニターで確認しながら当該半導体チップ106が所定の状態となるようにXYθステージ108を使用して位置出しを行う。
【0011】
次に、ステップS8の工程では、バキュームヘッド103によってXYθステージ108からベース109毎吸引させて、このベース109をキュア工程へと移送させる。そして、ステップS9の工程で、取り出したベース109の銀ペースト110を熱処理して半導体チップ106をベース109のチップ実装面に固定させる。
【0012】
次に、ステップS10の工程において、半導体レーザチップを実装させたベース109を再び第2実装機102のXYθステージ108上にセットする。そして、次のステップS11の工程では、前記ベース109に実装させた半導体チップ106を基準として、当該ベース109をXYθステージ108により所定状態となるように位置出しを行う。
【0013】
次に、ステップS12の工程で、フォトディテクタチップを実装させるベース109のチップ実装面上に銀ペースト110を塗布する。続いて、ステップS13の工程で、チップセット部105上にフォトディテクタチップ(図6ではチップ2と表記してある)である半導体チップ106を載せる。そして、次のステップS14の工程では、第1CCDカメラ107によって半導体チップ106の前記チップセット部105に対する実装位置を撮影し、その実装位置をモニターで確認しながら当該半導体チップ106が所定の状態となるようにXYθステージ104を使用して位置出しを行う。
【0014】
次に、ステップS15の工程では、位置出しが終了した半導体チップ106をバキュームヘッド103で吸引保持させる。そして、次のステップS16の工程では、バキュームヘッド103に吸引保持した半導体チップ106をマウント側まで移送させた後、第2CCDカメラ111により半導体チップ106のチップ実装面に対する実装位置を撮影してその実装位置をモニターで確認しながら先に実装した半導体チップ106に対して所定の相対的位置となるように前記半導体チップ106をXYθステージ108によって位置出しする。
【0015】
次に、ステップS17の工程では、バキュームヘッド103によってXYθステージ108からベース109毎吸引させて、このベース109をキュア工程へ移送させる。そして、ステップS18の工程で、取り出したベース109上の銀ペースト110を熱処理して半導体チップ106をベース109のチップ実装面に固定させる。これで、半導体レーザチップとフォトディテクタチップの二つの半導体チップ106のベース109に対するダイボンディングが終了する。
【0016】
この他、半導体チップを位置決めして所定の位置に実装させる技術としては、例えば、寸法形状の異なる数種類の半導体チップを制御部で判断して所望の半導体チップを移送機構部にてチップ位置決め部に移送し、そのチップ位置決め部に設けた逆多角錐形状の窪みに半導体チップを挿入させ、この窪みに半導体チップを収容させることによって該半導体チップの位置決めを行い、さらにボンディングツールでこの窪みから半導体チップを取り出し、搭載部に設けた基板の所定位置に実装させる技術が知られている(例えば、特許文献1など参照)。
【0017】
また、この他、半導体ウエハからベアチップを取り出し、該ベアチップを検査台上に移送させて検査機構にてチップ状態を検査した後、ボンディングヘッドでベアチップを吸着して検査位置から実装基板上へと移動させ、実装部でベアチップをボンディングさせるために、半導体ウエハを複数配置させた数台の載置台と、実装基板上にベアチップを実装させる実装機構を複数台設けた装置が知られている(例えば、特許文献2など参照)。
【0018】
さらに、この他、リードフレーム供給部からリードフレームを搬送部へと供給し、該搬送部で寸法形状の異なる半導体素子に対応した複数個の半田供給装置の中からその大きさに応じた半田供給装置を使用して半田材を供給させた後、その半田材の上に、同様に寸法形状の異なる半導体素子に対応して設けた数種類のチャックの中から適切なチャックを使用して半導体素子を位置決め部に搬送させ、位置決めを行った後、半導体素子を接合部に搬送してリードフレーム上に実装させる半導体製造装置が知られている(例えば、特許文献3など参照)。
【0019】
【特許文献1】
特開平3−219647号公報(第5頁及び第6頁、図1〜図4)
【特許文献2】
特開2001−150255号公報(第3頁及び第4頁、図1及び図2)
【特許文献1】
特開平4−76926号公報(第4頁〜第6頁、図1〜図4)
【0020】
【発明が解決しようとする課題】
ところで、前記した図6のフローチャートで示すチップ実装方法では、半導体レーザチップとフォトディテクタチップは、それぞれ別工程で1個づつ位置決めを行った後にベース109にダイボンディングされている。このため、半導体レーザチップとフォトディテクタチップの相対位置関係を高精度にするためには、それぞれの実装工程にて高価な画像処理システムや高精度位置決め機構や高精度移送機構が必要となる。その結果、ダイボンディング装置が複雑な構造となり、また価格も非常に高くなってしまい、ダイボンディング装置の運営、維持、管理も面倒なものとなる。
【0021】
特に、図6のフローチャートで示す各工程にて半導体チップ106を実装する場合は、半導体レーザチップとフォトディテクタチップのダイボンディング工程が分かれているため、それぞれのダイボンディング工程の後に銀ペースト110などの接着剤を恒温槽にて硬化させる必要があり、リードタイムが長くなり、また、それぞれの工程が増えるので作業時間が長くなるという課題がある。
【0022】
そこで、本発明は、このような課題に鑑みてなされたものであり、高価な画像処理システムを使用することなく簡単な装置構成で二つの電子部品の相対位置を高精度に保持した状態で実装可能とし、さらには、電子部品実装後のキュア工程を1回で行うことができ、リードタイムの短縮を図ることのできる電子部品のダイボンディング方法及びダイボンディング装置を提供することを目的とする。
【0023】
【課題を解決するための手段】
本発明の電子部品のダイボンディング方法は、二つの電子部品の相対位置が出された状態を保持させた状態で、各位置決めブロック上の二つの電子部品を同時に吸着する工程と、吸着保持した二つの電子部品を、チップの位置出しを行うアライメント側からチップの実装を行うマウント側へ移送し、これら二つの電子部品を同時にベースに形成した各チップ実装面に実装する工程とを備えている。
【0024】
本発明の電子部品のダイボンディング方法によれば、二つの電子部品の相対位置を位置出しした後に、その相対位置を保持させた状態でこれら二つの電子部品を同時に吸着してアライメント側からマウント側に移送させ、これら電子部品を同時にベースの各チップ実装面に実装させていることから、二つの電子部品の相対位置を精度良く保った状態での実装が行え、しかも1回の実装工程で済むことになり、製造工程が大幅に短縮される。
【0025】
また、本発明のダイボンディング装置は、チップの位置出しを行うアライメント側に設けられた、二つの電子部品の相対位置を位置出しするチップ位置出し機構部と、相対位置が出された二つの電子部品を同時に吸着する吸着ヘッドと、電子部品をそれぞれの位置に実装させるチップ実装面を有したベースを、前記アライメント側と離れたマウント側に設けられたベース位置出し手段上に載置し、チップ実装面がマウント基準位置となるように該ベース位置出し手段によって前記ベースを位置出しするベース位置出し機構部と、電子部品を吸着させた吸着ヘッドを、アライメント側からマウント側へ移送させて前記ベースへと下降させ、当該吸着ヘッドに吸着させた二つの前記電子部品を同時に各チップ実装面に載置させる移送機構部とを備える。
【0026】
本発明のダイボンディング装置によれば、チップ位置出し機構部によって相対位置を出した二つの電子部品を、吸着ヘッドで同時に吸着し、その相対位置関係を保持させた状態でアライメント側からマウント側へ移送機構部によって移送し、これら二つの電子部品を同時にベース位置出し機構部上に設けたベースの各チップ実装面に載置させると、その精度が保持されたままの状態でベースに電子部品が実装されることなる。このため、二つの電子部品を1回の実装工程で実装し得ることが可能となりる。
【0027】
【発明の実施の形態】
以下、本発明を適用した具体的な実施の形態について図面を参照しながら詳細に説明する。本実施の形態は、光学ピックアップ装置を構成する、二つの電子部品である半導体レーザチップとフォトディテクタチップの相対位置を高精度なものとしてチップ実装基台であるベースに実装可能とするダイボンディング方法と、その方法を実現するダイボンディング装置に、本発明を適用したものである。
【0028】
[ダイボンディング装置の構成]
先ず、ダイボンディング装置の構成を図面を参照して説明する。図1はダイボンディング装置の全体を示す正面図であり、図2はチップ位置出し機構部に設けられたチップ位置出し手段を示し、(a)は位置決めブロック上に電子部品が載置された状態を示す平面図、(b)はチップ位置出し手段を示す平面図である。
【0029】
本実施の形態のダイボンディング装置は、半導体レーザチップとフォトディテクタチップの相対位置を位置出しするチップ位置出し機構部1と、このチップ位置出し機構部1により相対位置が出された、これら二つの半導体レーザチップとフォトディテクタチップを同時に吸着する吸着ヘッド2と、半導体レーザチップとフォトディテクタチップをそれぞれの位置に実装させるベースを位置出しするベース位置出し機構部3と、吸着ヘッド2をアライメント側からチップ実装を行うマウント側へ移送させて吸着ヘッド2に吸着させた二つの半導体レーザチップとフォトディテクタチップを同時にベースに載置させるチップ移送機構部4とを備えている。
【0030】
「チップ位置出し機構部」
チップ位置出し機構部1は、図1に示すように、半導体レーザチップ5とフォトディテクタチップ6を載置させるそれぞれの位置決めブロック7、8と、各位置決めブロック7、8上に載置させた半導体レーザチップ5とフォトディテクタチップ6を所定の方向に位置調整可能とするチップ位置出し手段である第1のXYθステージ9及び第2のXYθステージ10と、各位置決めブロック7、8上に載置させた半導体レーザチップ5とフォトディテクタチップ6の載置位置を撮影する第1の撮像手段であるチップ位置決め用カメラ11と、このチップ位置決め用カメラ11の位置を調整可能とする位置出し手段である第1のカメラ調整ステージ12とから構成される。
【0031】
位置決めブロック7、8は、図2に示すように、半導体レーザチップ5及びフォトディテクタチップ6を載置させる載置面7a、8aを有し、それぞれの第1のXYθステージ9及び第2のXYθステージ10上に設けられた支持台13、14の上に固定されている。載置面7a、8aには、半導体レーザチップ5及びフォトディテクタチップ6をそれぞれ位置決めさせる突き当て突起部15、16が設けられている。
【0032】
突き当て突起部15、16は、例えば図2(a)中矢印で示すX方向と、このX方向と直交するY方向の2方向にそれぞれ延びる突き当て部15A,15B、16A,16Bを有した平面略逆L字状のブロックとして形成されている。半導体レーザチップ5とフォトディテクタチップ6は、一つの角部を挟む二つの側壁をそれぞれの突き当て部15A,15B、16A,16Bに突き当てることにより載置面7a、8aに対する位置が決まる。
【0033】
この位置決めブロック7、8には、前記した載置面7a、8aに載置させた半導体レーザチップ5とフォトディテクタチップ6を吸着保持させるための図示しない吸着手段が設けられている。したがって、半導体レーザチップ5及びフォトディテクタチップ6は、それぞれの位置決めブロック7、8に載置されることによって、ある程度位置決めされた状態で前記載置面7a、8aに固定されることになる。
【0034】
第1のXYθステージ9及び第2のXYθステージ10は、図2に示すように、X方向に移動自在なXステージ9a、10aと、このX方向と直交するY方向に移動自在なYステージ9b、10bと、面内方向(θ方向)に回転自在なθステージ9c、10cとからなる。半導体レーザチップ5とフォトディテクタチップ6は、それぞれのチップ中心がX方向で何ミリ、Y方向で何ミリ、θ方向は零度というようにその相対位置が決まっており、予め決められた所定の位置関係となるように、前記第1のXYθステージ9及び第2のXYθステージ10を使用して位置出しがなされる。
【0035】
チップ位置決め用カメラ11は、図1に示すように、各位置決めブロック7、8の上に載置された半導体レーザチップ5及びフォトディテクタチップ6の載置位置を撮影するためのもので、当該位置決めブロック7、8の真上に設けられている。このチップ位置決め用カメラ11には、各位置決めブロック7、8上に載置された半導体レーザチップ5及びフォトディテクタチップ6の載置位置を表示させる画像表示手段であるモニター17が接続されている。そして、このモニター17には、予め決められた半導体レーザチップ5とフォトディテクタチップ6の相対位置(実装位置)を示すXY方向のラインを該モニター17に表示させるライン発生器18が接続されている。
【0036】
第1のカメラ調整ステージ12は、図1に示すように、チップ位置決め用カメラ11を移動自在とする位置出し手段であり、前記第1のXYθステージ9及び第2のXYθステージ10を固定させる架台19に立設した支柱20の先端に設けられた天板21上に固定されている。この第1のカメラ調整ステージ12は、半導体レーザチップ5とフォトディテクタチップ6の相対位置が規定位置に対して長い場合や高さに差がある場合などはチップ位置決め用カメラ11をこれらチップ間で位置合わせする必要があるため、これに応じてチップ位置決め用カメラ11をスライド調整するのに使用される。かかる第1のカメラ調整ステージ12は、図1において左右方向であるX方向と、前後方向であるY方向と、上下方向(位置決めブロック7、8に近接又は離間する方向)であるZ方向にそれぞれ移動自在となっている。
【0037】
ライン発生器18は、モニター17の画面上に、XY方向の直交するラインをいくつか表示させるように構成されている。そして、このモニター17の画面上に表示されたラインを目標にして、チップ位置決め用カメラ11で各位置決めブロック7、8上に載置された半導体レーザチップ5とフォトディテクタチップ6の載置位置を確認しながら前記した第1のXYθステージ9及び第2のXYθステージ10によって、これら半導体レーザチップ5とフォトディテクタチップ6をそれぞれのラインに合わせる。つまり、チップ位置決め用カメラ11で捕らえたチップ画像の基準面を、モニター17の画面上に表示されたラインに一致させるべく、第1のXYθステージ9及び第2のXYθステージ10を使用して調整する。
【0038】
「ベース位置出し機構部」
ベース位置出し機構部3は、図1に示すように、半導体レーザチップ5とフォトディテクタチップ6を実装させるチップ実装面22a、22b(図5参照)を有したベース22と、このベース22を移動自在とするベース位置出し手段である第3のXYθステージ23と、チップ実装面22a、22bを撮影する第2の撮影手段であるベース位置決め用カメラ24と、このベース位置決め用カメラ24の位置を調整可能とする位置出し手段である第2のカメラ調整ステージ25とから構成される。
【0039】
ベース22は、図5に示すように、光学ピックアップ装置のチップ実装基台からなり、半導体レーザチップ5とフォトディテクタチップ6をそれぞれの位置に実装させるチップ実装面22a、22bを有している。このベース22は、後述する第3のXYθステージ23上に配置される。
【0040】
第3のXYθステージ23は、図5に示すように、X方向に移動自在なXステージ23aと、このX方向と直交するY方向に移動自在なYステージ23bと、面内方向(θ方向)に回転自在なθステージ23cとからなる。この第3のXYθステージ23では、Xステージ23a、Yステージ23b及びθステージ23cをそれぞれ動かして、前記チップ実装面22a、22bがマウント基準位置となるように調整される。ここで定義するマウント基準位置とは、各チップ実装面22a、22bに半導体レーザチップ5とフォトディテクタチップ6をそれぞれ実装するに際しての該ベース22に対する各チップの実装すべき基準となる位置を意味する。
【0041】
ベース位置決め用カメラ24は、図1に示すように、前記したベース22のチップ実装面22a、22bを撮影するもので、第3のXYθステージ23上に設けられている。このベース位置決め用カメラ24には、前記各チップ実装面22a、22bを表示画面上に映し出すモニター17が接続されている。
【0042】
第2のカメラ調整ステージ25は、図1に示すように、ベース位置決め用カメラ24を移動自在とする位置出し手段であり、前記第1のカメラ調整ステージ12と同じく前記した天板21上に固定されている。この第2のカメラ調整ステージ25は、第1のカメラ調整ステージ12と同様に、図1中矢印X方向と、Y方向と、Z方向にそれぞれ移動自在となっており、チップ実装面22a、22bをモニター17に映し出して位置調整をする際に使用される。
【0043】
「吸着ヘッド」
吸着ヘッド2は、図3に示すように、チップ位置出し機構部1によって相対位置が出された二つの半導体レーザチップ5及びフォトディテクタチップ6を同時に吸着するヘッドである第1吸着ヘッド26と第2吸着ヘッド27と、半導体レーザチップ5及びフォトディテクタチップ6の位置決めブロック7、8からの取り出し時または各チップ実装面22a、22bへの実装時に、第1吸着ヘッド26及び第2吸着ヘッド27を上方向へ逃がすためのヘッド上下動機構部と、第1吸着ヘッド26と第2吸着ヘッド27の高さ位置を調整するヘッド高さ位置調整機構部と、ヘッド押圧機構部とから構成されている。
【0044】
第1吸着ヘッド26及び第2吸着ヘッド27は、図示を省略する真空吸引手段からのバキュームによって、その先端部に半導体レーザチップ5及びフォトディテクタチップ6を吸着させるようになっている。この第1吸着ヘッド26及び第2吸着ヘッド27には、半導体レーザチップ5及びフォトディテクタチップ6を吸着させる先端部に通じるバキューム通路28が形成されている。
【0045】
ヘッド上下動機構部は、ヘッドベース基板29に設けられたスライドレール30、31を有し、このスライドレール30、31に前記第1吸着ヘッド26及び第2吸着ヘッド27をスライド自在に取り付けることにより、これら第1吸着ヘッド26と第2吸着ヘッド27とを上下動させる。
【0046】
ヘッド高さ位置調整機構部は、ヘッドベース基板29に固定された突き当てブロック32、33と、この突き当てブロック32、33に当接するストッパ部34、35と、このストッパ部34、35の高さ位置を調整する調整部材36、37とから構成され、半導体レーザチップ5とフォトディテクタチップ6の高さの差hを調整自在とする。
【0047】
ストッパ部34、35は、周面にねじ部を有したストレートピン形状として形成され、そのねじ部と螺合する例えばナットからなる調整部材36、37によって、前記第1吸着ヘッド26及び第2吸着ヘッド27の基端側に設けられたストッパ取付アーム38、39にそれぞれ取り付けられている。
【0048】
突き当てブロック32、33は、ヘッドベース基板29に固定されており、前記ストッパ部34、35の先端部がこの突き当てブロック32、33に当接することで、前記第1吸着ヘッド26及び第2吸着ヘッド27の高さ位置を位置決めさせる。
【0049】
ヘッド押圧機構部は、一対のバネ40,41、42,43と、これらバネ40,41、42,43の一端側を固定させるバネ固定部材44,45、46,47とから構成されている。一方のバネ40、42は、第1吸着ヘッド26及び第2吸着ヘッド27を下方へ付勢するように、ストッパ取付アーム38、39の上面とヘッドベース基板29の上方角部近傍に固定されたバネ固定部材44、46との間に設けられている。他方のバネ41、43は、ストッパ取付アーム38、39の下面とヘッドベース基板29の下方角部近傍に固定されたバネ固定部材45、47との間に設けられている。
【0050】
このヘッド押圧機構部は、アライメント側に相対位置が出された半導体レーザチップ5とフォトディテクタチップ6を位置決めブロック7、8上から取り出す時、及び吸着ヘッド2に吸着させた半導体レーザチップ5及びフォトディテクタチップ6をベース22上に実装させる時に、所定の押圧力を持って押し付けるのに使用される。
【0051】
このヘッド押圧機構部では、下方より数グラムの荷重が吸着ヘッド2に掛かると、この吸着ヘッド2を上方向に可動させるように前記したバネ40,41、42,43のばね力が決められている。これにより、半導体レーザチップ5及びフォトディテクタチップ6の位置決めブロック7、8からの取り出し時、及びベース22への実装時に、誤って半導体レーザチップ5及びフォトディテクタチップ6を押し潰すことを防止できる。
【0052】
「チップ移送機構部」
チップ移送機構部4は、図1に示すように、吸着ヘッド2をアライメント側からマウント側に移動自在とするスライドレール48と、このスライドレール48にスライド自在とされる移送機構本体部49と、この移送機構本体部49をスライドレール48に沿って移動自在とするスライド駆動部(図示は省略する)と、移送機構本体部49を上下方向に昇降動させる昇降動機構部(図示は省略する)とからなる。
【0053】
吸着ヘッド2は、移送機構本体部49に固定され、スライド駆動部によって前記スライドレール48に沿ってアライメント側とマウント側との間を移動自在とされている。また、この吸着ヘッド2は、昇降動機構部によって上下方向であるZ方向に昇降動自在とされている。
【0054】
[ダイボンディング方法]
次に、本実施の形態のダイボンディング方法を図面を参照しながら説明する。図4は半導体レーザチップ5及びフォトディテクタチップ6をベース22に実装する工程を示すフローチャートであり、図5は半導体レーザチップ5及びフォトディテクタチップ6をベース22に実装させる一連の工程を示す図である。
【0055】
図4のフローチャートに示すように、先ず、ステップ51の工程で、ベース22を第3のXYθステージ23上にセットする。次に、ステップ52の工程では、ベース22のチップ実装面22a、22bをベース位置決め用カメラ24で撮影し、そのチップ実装面22a、22bの位置をモニター17に表示させる。そして、作業者は、モニター17に映し出されたチップ実装面22a、22bの位置を確認しながら、第3のXYθステージ23を操作して、前記チップ実装面22a、22bがマウント基準位置となるようにベース22を位置出しする。
【0056】
次に、ステップS53の工程では、図5に示すように、各チップ実装面22a、22bに半導体レーザチップ5及びフォトディテクタチップ6を固定させるための銀ペースト50をそれぞれ塗布する。次いで、ステップS54の工程では、図2に示すように、半導体レーザチップ1(図4ではチップ1と表記してある)を一方の位置決めブロック7にセットすると共に、フォトディテクタチップ6(図4ではチップ2と表記してある)を他方の位置決めブロック8にセットする。
【0057】
半導体レーザチップ5及びフォトディテクタチップ6を各位置決めブロック7、8上にセットするには、前記した吸着手段によってこれら半導体レーザチップ5及びフォトディテクタチップ6を吸着させながらX方向及びY方向にそれぞれ延在する突き当て部15A,15B、16A,16Bに、半導体レーザチップ5及びフォトディテクタチップ6の1つの角部を挟む2つの側面をそれぞれ面接触させて突き当てる。これにより、半導体レーザチップ5及びフォトディテクタチップ6の位置決めブロック7、8に対する位置が決まる。
【0058】
次に、ステップS55の工程では、ライン発生器18でモニター17に表示させたXY方向のラインを、予め半導体レーザチップ5とフォトディテクタチップ6とが所定の相対位置となるように設定しておき、このラインにチップ位置決め用カメラ11で撮影した半導体レーザチップ5の画像を合わせる。位置合わせをするには、モニター17上で半導体レーザチップ5自身のX方向、Y方向及びθ方向の位置を確認しながら、この半導体レーザチップ5を第1のXYθステージ9を使用して位置出しをする。
【0059】
次に、ステップS56の工程では、先のステップS55の工程と同じく、モニター17上でフォトディテクタチップ6自身のX方向、Y方向及びθ方向の位置を確認しながら、このフォトディテクタチップ6をモニター17上のラインに合わせて第2のXYθステージ10を使用して位置出しをする。
【0060】
これら半導体レーザチップ5及びフォトディテクタチップ6の位置合わせ時において、二つのチップの相対位置が規定位置よりも長い場合や高さに差がある場合には、第1のカメラ調整ステージ12を使用してチップ位置決め用カメラ11の位置をチップ間で合わせ直す。
【0061】
次に、ステップS57の工程では、吸着ヘッド2を位置決めブロック7、8へと下降させ、相対位置が出された半導体レーザチップ5とフォトディテクタチップ6に対して吸着ヘッド2を前記したバネ40,41、42,43にて数グラムの加圧をしてその先端部に吸着させる。そして、半導体レーザチップ5とフォトディテクタチップ6を吸着ヘッド2に吸着させた後、これら半導体レーザチップ5とフォトディテクタチップ6の前記位置決めブロック7、8への吸着を終了させる。そして、半導体レーザチップ5とフォトディテクタチップ6を位置決めブロック7、8から同時に取り出す。
【0062】
次に、ステップS58の工程では、チップ移送機構部4によって吸着ヘッド2を上昇させた後、スライドレール48に沿ってアライメント側からマウント側に吸着ヘッド2を移動(移載)させる。そして、この吸着ヘッド2を第3のXYθステージ23上にセットしたベース22へと下降させた後、これら半導体レーザチップ5及びフォトディテクタチップ6をベース22上の各チップ実装面22a、22bに所定の押圧力を持って実装させる。
【0063】
このとき、半導体レーザチップ5とフォトディテクタチップ6は予めそれらの相対位置が出されているので、ここでは、単に各チップ実装面22a、22bにチップを実装させるだけで、二つのチップ間の相対位置精度を高精度に維持させることができる。そして、吸着ヘッド2による吸着を終了し、この吸着ヘッド2をチップ移送機構部4によって上昇させる。
【0064】
次に、ステップS59の工程では、二つの半導体レーザチップ5とフォトディテクタチップ6が実装されたベース22を、第3のXYθステージ23から取り外し恒温槽へ移送させてキュアを行う。そして、ベース22上の銀ペースト50を恒温槽にて熱処理することにより、半導体レーザチップ5とフォトディテクタチップ6をそれぞれのチップ実装面22a、22bに固定させる。
【0065】
このように、本実施の形態のダイボンディング方法によれば、相対位置が非常に厳しく管理される半導体レーザチップ5とフォトディテクタチップ6の二つの半導体チップを、チップ位置出し機構部1にて予めそれらの相対位置を出しておき、それらチップを同時に吸着してベース22上に実装させるため、これら二つの半導体レーザチップ5及びフォトディテクタチップ6を1回の実装工程で、その相対位置関係を精度良く保つことができる。したがって、高価な画像処理システムや高精度位置決め機構或いは高精度移送機構が不要となる。
【0066】
また、本実施の形態のダイボンディング方法では、半導体レーザチップ5とフォトディテクタチップ6を同時に位置決めブロック7、8から取り出すと共に同時にベース22に実装させており、また、半導体レーザチップ5及びフォトディテクタチップ6を同時にキュアしているため、リードタイムを大幅に短縮させることができると共に、製造プロセスも大幅に簡略化することができる。
【0067】
以上、本発明を適用した具体的な実施の形態について説明したが、本発明は、上述の実施の形態に制限されることなく種々の変更が可能である。
【0068】
上述した実施の形態では、半導体レーザチップ5とフォトディテクタチップ6の二つの半導体チップを同時にベース22に実装させる例として説明したが、3つ以上の半導体チップの相対位置を予め出しておき、それら相対位置が出された3つ以上の半導体チップを同時にベース22に実装させるようにしてもよい。
【0069】
【発明の効果】
本発明の電子部品のダイボンディング方法によれば、予め少なくとも二つの電子部品の相対位置を出しておいて、その相対位置が出された電子部品を同時にベース上の各チップ実装面に実装させているので、高価な画像処理システムや高精度位置決め機構或いは高精度移送機構を使用することなく、簡単に電子部品の相対位置を高精度に維持させることができる。
【0070】
また、本発明の電子部品のダイボンディング方法によれば、二つの電子部品を1回の実装で実装させることが出来ると共に電子部品実装後に行うキュア工程が1回で済むことから、リードタイムを大幅に短縮させることができると共に製造工程数も減らすことができる。また、半導体レーザチップなどのような熱サイクルを何度もかけたくないチップも1度のキュアで済むため、電子部品の性能を損なうようなことはない。
【0071】
本発明のダイボンディング装置によれば、チップ位置出し機構部によって相対位置を出した二つの電子部品を、吸着ヘッドで同時に吸着し、その相対位置関係を保持させた状態でアライメント側からマウント側へ移送機構部によって移送し、これら二つの電子部品を同時にベース位置出し手段上に設けたベースの各チップ実装面に実装させる装置構成としているので、高価な画像処理システムなどの特別な装置を必要とすることなく、簡単な構造でその相対位置を精度良く保った状態とすることができ、設備投資、加工コスト、メンテナンスコスト、設備設置スペースを低減させることができる。
【図面の簡単な説明】
【図1】図1は、本発明を適用したダイボンディング装置の全体を示す正面図である。
【図2】図2は、チップ位置出し機構部に設けられたチップ位置出し手段を示し、(a)は位置決めブロック上に電子部品が載置された状態を示す平面図、(b)はチップ位置出し手段を示す平面図である。
【図3】図3は、吸着ヘッドの構造を示す正面図である。
【図4】図4は、半導体レーザチップ及びフォトディテクタチップをベースに実装する工程を示すフローチャートである。
【図5】図5は、半導体レーザチップ及びフォトディテクタチップをベースに実装するまでの一連の工程を示す図である。
【図6】図6は、従来のダイボンディング方法の一例を示すフローチャートである。
【図7】図7は、従来のダイボンディング方法で使用されるダイボンディング装置の一例を示す装置構成図である。
【符号の説明】
1…チップ位置出し機構部
2…吸着ヘッド
3…ベース位置出し機構部
4…チップ移送機構部
5…半導体レーザチップ
6…フォトディテクタチップ
7、8…位置決めブロック
9…第1のXYθステージ
10…第2のXYθステージ
11…チップ位置決め用カメラ
12…第1のカメラ調整ステージ
17…モニター
18…ライン発生器
22…ベース
23…第3のXYθステージ
24…ベース位置決め用カメラ
25…第2のカメラ調整ステージ
26…第1吸着ヘッド
27…第2吸着ヘッド
Claims (4)
- 少なくとも二つの電子部品をそれぞれの位置に実装させるチップ実装面を有したベースを、マウント側のベース位置出し機構部上にセットし、このベース位置出し機構部によって前記ベースを位置出しする工程と、
前記各チップ実装面に前記電子部品を固定させるボンディング用ペーストを塗布する工程と、
前記マウント側と離れた位置のアライメント側に設けられた、前記二つの電子部品の相対位置を位置出しするチップ位置出し機構部のそれぞれの位置決めブロック上に各電子部品を載置する工程と、
前記チップ位置出し機構部により前記一方の電子部品を位置出しした後、この電子部品を基準として他方の電子部品を、該チップ位置出し機構部により前記位置出しされた一方の電子部品に対して所定の相対位置となるように位置出しをする工程と、
これら二つの電子部品の相対位置が出された状態を保持させた状態で前記各位置決めブロック上の二つの電子部品を同時に吸着する工程と、
吸着保持した二つの前記電子部品を、チップの位置出しを行うアライメント側からチップの実装を行うマウント側へ移送し、これら二つの電子部品を同時に前記ベースの各チップ実装面に実装する工程とを備えた
ことを特徴とする電子部品のダイボンディング方法。 - 電子部品の位置出しを行うアライメント側に設けられ、少なくとも二つの電子部品をそれぞれの位置決めブロック上に載置し、その載置位置を第1の撮像手段で撮影して画像表示手段に表示させながらこれら二つの電子部品の相対位置を、各チップ位置出し手段によって位置出しをするチップ位置出し機構部と、
前記チップ位置出し機構部により相対位置が出された二つの電子部品を同時に吸着して前記各位置決めブロックから取り出す吸着ヘッドと、
前記電子部品をそれぞれの位置に実装させるチップ実装面を有したベースを、前記アライメント側と離れた位置のマウント側に設けられたベース位置出し手段上に載置し、そのチップ実装面を第2の撮像手段で撮影して前記画像表示手段に表示させながら該ベース位置出し手段によって前記ベースを位置出しするベース位置出し機構部と、
前記電子部品を吸着させた前記吸着ヘッドを、少なくともアライメント側からマウント側へ移送させて前記ベースへと下降させ、該吸着ヘッドに吸着させた二つの前記電子部品を同時に前記各チップ実装面に実装させる移送機構部とを備えた
ことを特徴とするダイボンディング装置。 - 請求項2記載のダイボンディング装置であって、
前記吸着ヘッドは、各電子部品を吸着させるそれぞれのヘッドと、各ヘッドを所定の力で前記位置決めブロック上又は前記チップ実装面に押し付ける押圧手段と、各ヘッドの高さ位置を調整可能とする高さ調整手段とからなる
ことを特徴とするダイボンディング装置。 - 請求項2記載のダイボンディング装置であって、
前記第1の撮像手段及び第2の撮像手段には、前記二つの電子部品の相対位置に応じてこの第1の撮像手段及び第2の撮像手段を移動自在とする位置出し手段が設けられている
ことを特徴とするダイボンディング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003161156A JP2004363399A (ja) | 2003-06-05 | 2003-06-05 | 電子部品のダイボンディング方法及びダイボンディング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003161156A JP2004363399A (ja) | 2003-06-05 | 2003-06-05 | 電子部品のダイボンディング方法及びダイボンディング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004363399A true JP2004363399A (ja) | 2004-12-24 |
Family
ID=34053700
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003161156A Pending JP2004363399A (ja) | 2003-06-05 | 2003-06-05 | 電子部品のダイボンディング方法及びダイボンディング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004363399A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015045935A1 (ja) * | 2013-09-25 | 2015-04-02 | 東レエンジニアリング株式会社 | ボンディング装置 |
| KR20170121909A (ko) * | 2016-04-26 | 2017-11-03 | 세메스 주식회사 | 웨이퍼 상에 다이들을 본딩하기 위한 장치 및 방법 |
| CN117886123A (zh) * | 2023-12-29 | 2024-04-16 | 苏州欧亦姆半导体设备科技有限公司 | 一种检测装载装置 |
-
2003
- 2003-06-05 JP JP2003161156A patent/JP2004363399A/ja active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015045935A1 (ja) * | 2013-09-25 | 2015-04-02 | 東レエンジニアリング株式会社 | ボンディング装置 |
| JP2015065328A (ja) * | 2013-09-25 | 2015-04-09 | 東レエンジニアリング株式会社 | ボンディング装置 |
| KR20170121909A (ko) * | 2016-04-26 | 2017-11-03 | 세메스 주식회사 | 웨이퍼 상에 다이들을 본딩하기 위한 장치 및 방법 |
| KR102580580B1 (ko) * | 2016-04-26 | 2023-09-20 | 세메스 주식회사 | 웨이퍼 상에 다이들을 본딩하기 위한 장치 및 방법 |
| CN117886123A (zh) * | 2023-12-29 | 2024-04-16 | 苏州欧亦姆半导体设备科技有限公司 | 一种检测装载装置 |
| CN117886123B (zh) * | 2023-12-29 | 2024-10-25 | 苏州欧亦姆半导体设备科技有限公司 | 一种检测装载装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101807369B1 (ko) | 본딩 장치 및 본딩 방법 | |
| TWI807957B (zh) | 電子零件的安裝裝置 | |
| JP7850239B2 (ja) | 電子部品の実装装置 | |
| US10784130B2 (en) | Bonding apparatus | |
| CN100449718C (zh) | 用于安装半导体芯片的方法和装置 | |
| JP7607973B1 (ja) | 電子部品接合装置 | |
| JP7450429B2 (ja) | 電子部品の実装装置 | |
| JP2000150970A (ja) | 発光素子のボンディング方法および装置 | |
| JP7829772B2 (ja) | 実装装置および実装方法 | |
| JP2004158797A (ja) | バンプボール圧着装置 | |
| JP2004363399A (ja) | 電子部品のダイボンディング方法及びダイボンディング装置 | |
| JP3962906B2 (ja) | 部品実装装置及び部品実装方法 | |
| JPH0675199A (ja) | 液晶パネル製造装置、位置決め装置および加工装置 | |
| KR102252732B1 (ko) | 다이 본딩 방법 및 다이 본딩 장치 | |
| KR102568389B1 (ko) | 본딩 장치 | |
| JP2889688B2 (ja) | 電子部品の組立方法及び組立装置 | |
| CN112331582A (zh) | 芯片贴装装置以及半导体器件的制造方法 | |
| KR102891548B1 (ko) | 본딩장치 및 본딩장치의 보정방법 | |
| KR20230110478A (ko) | 전자 부품의 실장 장치 | |
| JP5017041B2 (ja) | 部品実装方法及び装置 | |
| JP3853402B2 (ja) | チップボンディング装置 | |
| KR102568388B1 (ko) | 본딩 장치 | |
| JP3178240B2 (ja) | デバイスのボンディング装置 | |
| CN112992736A (zh) | 扇出型芯片封装装置以及方法 | |
| JP7757255B2 (ja) | 実装装置 |