JP2005103165A - 走行装置 - Google Patents
走行装置 Download PDFInfo
- Publication number
- JP2005103165A JP2005103165A JP2003343858A JP2003343858A JP2005103165A JP 2005103165 A JP2005103165 A JP 2005103165A JP 2003343858 A JP2003343858 A JP 2003343858A JP 2003343858 A JP2003343858 A JP 2003343858A JP 2005103165 A JP2005103165 A JP 2005103165A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- wheels
- pair
- wheel
- drive shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Toys (AREA)
Abstract
【課題】 障害物との衝突による車両の方向転換を簡易かつ安価な装置機構で実現できる走行装置を提供する。
【解決手段】 横に並べて配される一対の車輪13によって走行する二輪駆動の二輪車両1と、二輪車両1から前側に向けて突出して設けられ、障害物との衝突によって車両を前後乃至左右方向に跳ね返らせる反発力を発揮する弾性反発体2とを備えた走行装置であって、単振動中にある弾性反発体2が、障害物との衝突によって二輪車両1を方向転換させる走行装置である。
【選択図】 図1
【解決手段】 横に並べて配される一対の車輪13によって走行する二輪駆動の二輪車両1と、二輪車両1から前側に向けて突出して設けられ、障害物との衝突によって車両を前後乃至左右方向に跳ね返らせる反発力を発揮する弾性反発体2とを備えた走行装置であって、単振動中にある弾性反発体2が、障害物との衝突によって二輪車両1を方向転換させる走行装置である。
【選択図】 図1
Description
本発明は、ロボット装置、走行玩具その他の物品として具現化される走行装置に関する。
従来、例えば横に並べて配される一対の車輪によって走行する二輪駆動の四輪車両を備えた自動四輪車であって、駆動輪である前二輪が、後二輪に比して小さく形成され、障害物との衝突によって四輪車両を方向転換させる方向転換装置として作用するものが開示されている(例えば、特許文献1参照)。
特開2003−93753号公報
ところで、従来の自動四輪車においては、障害物との衝突によって車両を方向転換させる方向転換装置が組み込まれているが、この方向転換装置は、多数の部品を使って具体化されるものであり、きわめて複雑かつ高価な装置機構からなる態様となり、製造コストの高騰を招く点で問題がある。
そこで、本発明の課題は、製造コストの低減効果が得られるように、障害物との衝突による車両の方向転換を簡易かつ安価な装置機構で実現できる走行装置を提供することにある。
そこで、本発明の課題は、製造コストの低減効果が得られるように、障害物との衝突による車両の方向転換を簡易かつ安価な装置機構で実現できる走行装置を提供することにある。
上記課題を解決するため、本発明に係る走行装置は、横に並べて配され、駆動する一対の車輪を用いて走行する二輪駆動の車両と、この車両から前側に向けて突出して設けられ、障害物との衝突によって車両を前後乃至左右方向に跳ね返らせる反発力を発揮する弾性反発体とを備えたことを特徴としている。
このような走行装置によれば、障害物との衝突によって車両を前後乃至左右方向に跳ね返らせる反発力を発揮する弾性反発体を備えたことを特徴として構成されるので、障害物との衝突による車両の方向転換を簡易かつ安価な装置機構で実現できる。
したがって、これによれば、製造コストの低減効果が得られることが可能となる。
このような走行装置によれば、障害物との衝突によって車両を前後乃至左右方向に跳ね返らせる反発力を発揮する弾性反発体を備えたことを特徴として構成されるので、障害物との衝突による車両の方向転換を簡易かつ安価な装置機構で実現できる。
したがって、これによれば、製造コストの低減効果が得られることが可能となる。
このような技術的手段において、弾性反発体を用いるのみならず、車両それ自体をも用いることとして、車両の方向転換をより確実に実現を実現しようとする観点からすれば、車両が、一対の車輪によって走行する二輪駆動の二輪車両であることが好ましい。
また、車両の各車輪のうちの一方の車輪に駆動軸からトルクが伝わらないようにして、障害物との衝突の際に車両の回転運動を実現させようとする観点からすれば、車両の駆動軸及び各車輪の間に、これらを同期に回動させる同期回動手段がそれぞれ介在されている場合において、車両の駆動軸及び各車輪の間に作用するトルクの値があらかじめ設定された値を超えたときに、同期回動手段のうちの一方による同期回動を解除することを可能としたことが好ましい。
この場合において、車両の各車輪のうちの一方の車輪に駆動軸からトルクが伝わる程度を調節し得るようにして、障害物との衝突の際に車両の動きをバリエーションに富んだものにするという観点からすれば、同期回動を解除すべきトルクの値を、異なる値に可変設定することを可能としたことが好ましい。
また、車両の各車輪のうちの一方の車輪に駆動軸からトルクが伝わらないようにして、障害物との衝突の際に車両の回転運動を実現させようとする観点からすれば、車両の駆動軸及び各車輪の間に、これらを同期に回動させる同期回動手段がそれぞれ介在されている場合において、車両の駆動軸及び各車輪の間に作用するトルクの値があらかじめ設定された値を超えたときに、同期回動手段のうちの一方による同期回動を解除することを可能としたことが好ましい。
この場合において、車両の各車輪のうちの一方の車輪に駆動軸からトルクが伝わる程度を調節し得るようにして、障害物との衝突の際に車両の動きをバリエーションに富んだものにするという観点からすれば、同期回動を解除すべきトルクの値を、異なる値に可変設定することを可能としたことが好ましい。
本発明に係る走行装置によれば、製造コストの低減効果が得られることとなる。
以下、添付図面に基づいて本発明の実施の形態を詳細に説明する。
なお、ここでは、本発明に係る走行装置が走行玩具として具体化される場合について説明するが、これに限られるものではなく、ロボット装置やその他物品として具体化される場合でも、以下の説明が妥当する。
◎実施の形態1
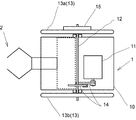
図1は本発明の実施の形態1に係る走行装置の全体構成を示す平面図、図2は同走行装置の全体構成を示す断面図、図3は同走行装置の作用を説明する平面図(図3(a)は同期回動手段が非解除のとき、図3(b)は同期回動手段が解除のとき)である。
図1は本発明の実施の形態1に係る走行装置の全体構成を示す平面図、図2は同走行装置の全体構成を示す断面図、図3は同走行装置の作用を説明する平面図(図3(a)は同期回動手段が非解除のとき、図3(b)は同期回動手段が解除のとき)である。
この実施の形態1において、走行装置は、走行玩具として具現化されるものとして構成されている。
そして、この走行装置は、図1及び図2に示すように、二輪車両1と、弾性反発体としての板ばね2とを備えたものとして構成されている。
以下、これらの各構成要素についてさらに詳細に説明する。
(1)二輪駆動の二輪車両1
二輪車両1は、これらの図に示すように、駆動輪としての二つの車輪13をもつ所謂二輪駆動の車両として構成されている。
二輪車両1は、これらの図に示すように、駆動輪としての二つの車輪13をもつ所謂二輪駆動の車両として構成されている。
二輪車両1は、これらの図に示すように、横に並べて配される一対の車輪13によって走行するものとして構成されている。
つまり、この実施の形態1では、車両として、一対の車輪によって走行する二輪駆動の二輪車両を採用していることから、弾性反発体のみならず、車両それ自体もが車両の方向転換に資することになっており、車両の方向転換をより確実に実現させることが可能となっている。
具体的には、二輪車両1は、これらの図に示すように、車両本体10と、この車両本体10に収容される駆動モータ11と、車両本体10に収容され、駆動モータ11によって回転力を付与される駆動軸12と、車両本体10の両側に設けられ、駆動軸12によってそれぞれ回転力を付与される一対の車輪13である右車輪13a及び左車輪13bと、車両本体10に収容され、駆動モータ11による回転力を駆動軸12に伝達するためのギア14と、駆動軸12による回転力を一対の車輪13のそれぞれに付与するための同期回動手段と、車両本体10に収容され、駆動モータ11の電源である電池を収容してなる電池ボックス16とを備えたものとして構成されている。
ここで、駆動軸12による回転力を右車輪13aに付与するための同期回動手段として、スリップ調節ダイヤル15が設けられている。
この同期回動手段は、図示しないが、二輪車両1の駆動軸12及び一対の車輪13の間に、それぞれ介在されており、これらを同期に回動させる機能を果たすものとして構成されている。
ここで、同期回動手段のうちの一の同期回動手段は、図示しないが、二輪車両1の駆動軸12及び右車輪13aの間に作用するトルクの値があらかじめ設定された値を超えたときに、その一方による同期回動を解除することを可能とされている。すなわち、図1に示すようなスリップ調節ダイヤル15が設けられており、これにより、右車輪13aと駆動軸12とのスリップの量をフリーにすることが可能となっているが、これは、例えばこの実施の形態1に係る走行装置が壁体と丁度直角に衝突した場合に、二輪車両1が方向転換をしないでそのまま止まってしまう事態を回避できるとともに、壁体との衝突がなくても、二輪車両1が回転運動する可能性を実現させるなど、遊びのバリエーションを広げることが可能となっている。
これにより、二輪車両1の一対の車輪13のうちの一方(右車輪13a)に駆動軸12からトルクが伝わらないことが可能となっており、その結果、壁体と衝突することによって、図3(a)に示すような二輪車両1の方向転換が実現するに止まらず、図3(b)に示すような二輪車両1の回転運動が実現することになっている。
一方、同期回動手段のうちの他の同期回動手段は、図示しないが、駆動軸12に左車輪13bを固着する溶接その他の技術的手段として構成されている。
この実施の形態1においては、図示しないが、同期回動を解除すべきトルクの値を、異なる値に可変設定することを可能とされている。すなわち、図1に示すようなスリップ調節ダイヤル15が設けられており、これにより、右車輪13aと駆動軸12とのスリップの量を固定からフリーまで漸次可変させることが可能となっている。
これにより、二輪車両1の一対の車輪13のうちの一方に駆動軸12からトルクが伝わる程度を調節することが可能となっており、その結果、壁体と衝突することによってなされる二輪車両1の動きがより一層バリエーションに富んだものとなり、消費者のニーズにより合致したものとなる。
(2)板ばね2
板ばね2は、これらの図に示すように、二輪車両1から前側に向けて突出して設けられたものとして構成されている。
板ばね2は、これらの図に示すように、二輪車両1から前側に向けて突出して設けられたものとして構成されている。
板ばね2は、鋼からなるものであり、障害物としての壁体と衝突することによって二輪車両1を前後乃至左右方向に跳ね返らせる反発力を発揮する機能を果たすものとして構成されている。
すなわち、このような板ばね2によれば、二輪車両1が壁体に直角に近く衝突しそうになっても、板ばね2が二輪車両1に先行して壁体に衝突することになっており、しかも、この衝突の瞬間における板ばね2は二輪車両1を前後乃至左右方向に跳ね返らせる反発力を発揮するため、壁体と衝突することによって二輪車両1を方向転換(図3(a)参照)乃至回転運動(図3(b)参照)させることが可能となっている。
ここで、車両の方向転換に資する二輪車両1を板ばね2に併せて採用したことから、車両の方向転換乃至回転運動をより確実に実現させることが可能となっている。
つまり、この実施の形態1に係る走行装置が壁体に直角に近く衝突した場合にあっては、前後に圧縮された板ばね2が二輪車両1を押し戻してこれを方向転換させる回転力を生み出すことになるが、このとき、二輪車であるが故に、相当の確実性をもって方向転換(図3(a)参照)乃至回転運動(図3(b)参照)が実現される。
なお、この実施の形態1に係る走行装置が壁体に直角以外の角度で衝突した場合にあっては、二輪車両1が徐々に方向を変えるのではなく一気に方向を変え、あたかもボールが壁体に跳ね返るかのように走行し続け、リズム感・スピード感に優れた動きを奏することが可能となっている。
この実施の形態1では、弾性反発体として、板ばね2を採用したが、これに限られるものではなく、材料や構造形式の別を問わず、衝突後に求められる二輪車両1の動きなどに応じて適宜選定して差し支えない。すなわち、弾性反発体として、ゴムや樹脂からなるものなども用いることができ、また、コイルばねや棒状のスプリングを単独で用いたものの他、これらの先端部におもりを固定したものなども用いることができる。
なお、板ばね2は、左右対称形状に形成されているが、左右各部分の剛性を異なる値に設定すれば、さらにリズム感・スピード感に優れた動きを奏することとなる。
上記したように、このような走行装置によれば、壁体との衝突によって二輪車両1を前後乃至左右方向に跳ね返らせる板ばね2を備えているので、壁体との衝突による二輪車両1の方向転換乃至回転運動を簡易かつ安価な装置機構によって実現することが可能となっている。
したがって、これによれば、十分な製造コストの低減効果が得られることになっている。
◎実施の形態2
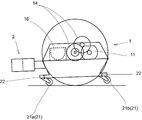
図4は本発明の実施の形態2に係る走行装置の全体構成を示す平面図、図5は同走行装置の全体構成を示す断面図である。なお、実施の形態1と同様な構成要素については実施の形態1と同様な符号を付してここではその詳細な説明を省略する。
図4は本発明の実施の形態2に係る走行装置の全体構成を示す平面図、図5は同走行装置の全体構成を示す断面図である。なお、実施の形態1と同様な構成要素については実施の形態1と同様な符号を付してここではその詳細な説明を省略する。
これらの図に示すように、この実施の形態2に係る走行装置の基本的構成は実施の形態1と略同様であるが、実施の形態1と異なり、電池ボックス16が駆動軸12の下側ではなく、駆動軸12の前側に収容されており、車両本体10の前後の各部位に、前後方向におけるバランスをとるための補助輪21である前補助輪21a及び後補助輪21bがそれぞれ設けられている。
ここで、前後の各補助輪21は、これらの図に示すように、垂直軸22周りで回転自在に設けられているが、一対の車輪13が接地する接地面から間隔をおいて設けられており、通常は接地していないものとして構成されている。つまり、この実施の形態2は、このような前後の各補助輪21によって二輪車輪1であることを妨げられるものではない。
すなわち、この実施の形態2では、スペースの関係上、電池ボックス16を駆動軸12の下側ではなく、駆動軸12の前側に収容することとしたが、これにより、前後方向におけるバランスを崩すこととなったため、前後の各補助輪21を設けることとしたものである。
したがって、この実施の形態2に係る走行装置によれば、実施の形態1と同様な作用・効果が得られることに加え、車両本体10にスペースがとれない不利を補うことが可能となっており、これは、製造コストの低減効果に資するものとなっている。
◎実施の形態3
図6は本発明の実施の形態3に係る走行装置の全体構成を示す平面図、図7は同走行装置の全体構成を示す断面図である。なお、実施の形態1と同様な構成要素については実施の形態1と同様な符号を付してここではその詳細な説明を省略する。
図6は本発明の実施の形態3に係る走行装置の全体構成を示す平面図、図7は同走行装置の全体構成を示す断面図である。なお、実施の形態1と同様な構成要素については実施の形態1と同様な符号を付してここではその詳細な説明を省略する。
これらの図に示すように、この実施の形態3に係る走行装置の基本的構成は実施の形態1と略同様であるが、実施の形態1と異なり、二輪車両1に代えて、四輪車両31を有している。すなわち、駆動軸12の前側に、駆動しない一対の車輪32が設けられており、駆動軸12の後側に、前後方向におけるバランスをとるための補助輪としてのボールキャリア33が設けられている。
ここで、一対の車輪32は、これらの図に示すように、四輪車両31の重心が駆動軸12の僅か前側に位置しているため、一対の車輪13が接地する接地面に接地しているが、一対の車輪13による接地圧力に比して、接地面に対して四輪車両31の方向転換乃至回転運動を妨げない程度に小さい接地圧力を付与しているに止まる。つまり、この実施の形態3は、四輪車両31として構成されているが、壁体との衝突による四輪車両31の方向転換乃至回転運動を妨げられるものではない。
したがって、この実施の形態3に係る走行装置によっても、実施の形態1と同様な作用・効果が得られることが可能となっている。
1 二輪車両
2 板ばね
10 車両本体
11 駆動モータ
12 駆動軸
13 一対の車輪
13a 右車輪
13b 左車輪
14 ギア
15 スリップ調節ダイヤル
16 電池ボックス16
21 補助輪
21a 前補助輪
21b 後補助輪
22 垂直軸
31 四輪車両
32 一対の車輪
33 ボールキャリア
2 板ばね
10 車両本体
11 駆動モータ
12 駆動軸
13 一対の車輪
13a 右車輪
13b 左車輪
14 ギア
15 スリップ調節ダイヤル
16 電池ボックス16
21 補助輪
21a 前補助輪
21b 後補助輪
22 垂直軸
31 四輪車両
32 一対の車輪
33 ボールキャリア
Claims (4)
- 横に並べて配され、駆動する一対の車輪を用いて走行する二輪駆動の車両と、この車両から前側に向けて突出して設けられ、障害物との衝突によって前記車両を前後乃至左右方向に跳ね返らせる反発力を発揮をする弾性反発体とを備えたことを特徴とする走行装置。
- 前記車両が、前記一対の車輪によって走行する二輪駆動の二輪車両であることを特徴とする請求項1に記載の走行装置。
- 前記車両の駆動軸及び一対の車輪の間に、これらを同期に回動させる同期回動手段がそれぞれ介在されている場合において、
前記車両の駆動軸及び一対の車輪の間に作用するトルクの値があらかじめ設定された値を超えたときに、同期回動手段のうちの一方による同期回動を解除することを可能としたことを特徴とする請求項1又は2に記載の走行装置。 - 前記同期回動を解除すべきトルクの値を、異なる値に可変設定することを可能としたことを特徴とする請求項3に記載の走行装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003343858A JP2005103165A (ja) | 2003-10-01 | 2003-10-01 | 走行装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003343858A JP2005103165A (ja) | 2003-10-01 | 2003-10-01 | 走行装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005103165A true JP2005103165A (ja) | 2005-04-21 |
Family
ID=34537658
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003343858A Pending JP2005103165A (ja) | 2003-10-01 | 2003-10-01 | 走行装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005103165A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112190741A (zh) * | 2020-09-23 | 2021-01-08 | 闫山 | 一种免掉头自返回无死角的医院走廊消毒机 |
| KR102950595B1 (ko) * | 2024-09-09 | 2026-04-10 | 네이버 주식회사 | 옴니 휠과 반발력을 갖는 범퍼를 포함하는 이동체 및 그 제어 방법 |
-
2003
- 2003-10-01 JP JP2003343858A patent/JP2005103165A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112190741A (zh) * | 2020-09-23 | 2021-01-08 | 闫山 | 一种免掉头自返回无死角的医院走廊消毒机 |
| KR102950595B1 (ko) * | 2024-09-09 | 2026-04-10 | 네이버 주식회사 | 옴니 휠과 반발력을 갖는 범퍼를 포함하는 이동체 및 그 제어 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6006780B2 (ja) | 移動体 | |
| JP3999110B2 (ja) | 無線操縦二輪車玩具 | |
| JP2012210899A (ja) | インホイルモータ装置 | |
| CA2702062A1 (en) | Two-wheel moving device and autocycle having that | |
| JP2013022993A (ja) | サスペンションシステム | |
| JPH0949562A (ja) | カウンターギヤ | |
| JP2005103165A (ja) | 走行装置 | |
| US7296663B2 (en) | Automotive wheel anti-gyro | |
| KR101590164B1 (ko) | 개별 서스펜션을 갖는 사륜형 이동 장치 | |
| JP2009286387A (ja) | 電動式パワーステアリング装置の騒音低減装置 | |
| JP7495228B2 (ja) | リーン型車両 | |
| WO2011007460A1 (ja) | ラジオコントロール自動車 | |
| KR100559887B1 (ko) | 자동차 현가장치의 스트럿 바 구조 | |
| WO2016051776A1 (ja) | ステアリングホイール用発電装置 | |
| JP4015534B2 (ja) | 無線操縦二輪車玩具 | |
| JP3111394U (ja) | 偏芯機構を設けたバッテリーカー | |
| JP4022126B2 (ja) | 自動車玩具 | |
| JP7184014B2 (ja) | ステアリングホイール | |
| JP6669009B2 (ja) | 走行装置 | |
| KR200172518Y1 (ko) | 스티어링 장치 | |
| JP4577704B2 (ja) | 自動二輪車の後車輪懸架装置 | |
| JP2018134970A (ja) | リーン機構を備える車両 | |
| JPH1016828A (ja) | 車両のバランス制御装置 | |
| JP6216092B1 (ja) | 車両玩具及び車両玩具の後輪側支持装置 | |
| JP2009533278A (ja) | 3輪以上の車両に適用される重心移動装置 |