JP2005121114A - スピンドル装置 - Google Patents
スピンドル装置 Download PDFInfo
- Publication number
- JP2005121114A JP2005121114A JP2003355817A JP2003355817A JP2005121114A JP 2005121114 A JP2005121114 A JP 2005121114A JP 2003355817 A JP2003355817 A JP 2003355817A JP 2003355817 A JP2003355817 A JP 2003355817A JP 2005121114 A JP2005121114 A JP 2005121114A
- Authority
- JP
- Japan
- Prior art keywords
- thrust
- external force
- spindle
- displacement
- radial direction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Magnetic Bearings And Hydrostatic Bearings (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Abstract
【課題】 精密旋盤等のスピンドルの回転精度を向上させる。
【解決手段】 ロータ部1a、1bを有するスピンドルは、モータ4による回転角度をエンコーダ9によって計測し、所定の回転角度ごとに、周方向に2つの部位でスピンドルの変位を検出する変位センサ5a、5b、7a、7bによってラジアル方向の外力を検出し、軸端の変位センサ11によってスラスト方向の外力を検出する。電磁石6a〜6d、8a〜8dは変位センサ5a、5b、7a、7bの出力に基づいて前記回転角度ごとにラジアル方向の外力を打ち消す推力を発生させ、ボイスコイルモータ10は変位センサ11の出力に基づいてスラスト方向の外力を打ち消す推力を発生する。
【選択図】図1
【解決手段】 ロータ部1a、1bを有するスピンドルは、モータ4による回転角度をエンコーダ9によって計測し、所定の回転角度ごとに、周方向に2つの部位でスピンドルの変位を検出する変位センサ5a、5b、7a、7bによってラジアル方向の外力を検出し、軸端の変位センサ11によってスラスト方向の外力を検出する。電磁石6a〜6d、8a〜8dは変位センサ5a、5b、7a、7bの出力に基づいて前記回転角度ごとにラジアル方向の外力を打ち消す推力を発生させ、ボイスコイルモータ10は変位センサ11の出力に基づいてスラスト方向の外力を打ち消す推力を発生する。
【選択図】図1
Description
本発明は、精密旋盤などにおける被加工物もしくはバイト等の加工工具を高精度に回転させるためのスピンドル装置に関するものである。
従来、精密旋盤などの超精密加工機の主軸であるスピンドルは、静圧空気軸受によって回転支持する構成が一般的である。例えば、図5に示すように、スピンドルのロータ部101を回転支持する軸受として、ラジアル方向の静圧軸受パッド102a、102bとスラスト方向の静圧軸受パッド103a、103bを有する静圧空気軸受を用いて、ロータ部101をモータ104によって回転する構成をとっている。また、静圧空気軸受を保護ベアリングとして磁気軸受に併用するハイブリッド軸受を用いた構成も知られている。
特開平04−185910号公報
しかしながら、従来技術によれば、一般的に静圧空気軸受を用いたスピンドルは、空気膜の軸受剛性と軸受部の粘性が低いため振動し易い特性を持っている。そのため、軸受部の空気膜の不均一な圧力分布やモータによるトルク変動が加振力となった場合、スピンドルの軸ぶれが大きくなる。こうした静圧空気軸受の欠点を補償するために、前述のように、静圧空気軸受と磁気軸受とを併用するハイブリッド軸受を用いたスピンドル装置が提案されている。
しかし、ハイブリッド軸受の場合に、静圧空気軸受によって磁気軸受の欠点を補償できるのは、周波数の低い帯域に限られる。磁気軸受はスピンドルとの軸受隙間を一定に保つように、軸受隙間変位を検出しフィードバック制御をしているが、一般にフィードバック制御を用いる場合は、フィードバック制御系の安定性が制御特性の制約となる。磁気軸受においてはスピンドルの機械的な共振特性がフィードバック制御系を不安定にする要因となり、フィードバック制御の効果が現れる周波数帯域は共振周波数のおよそ1/2から1/3以下になってしまう。そのため、補正できる周波数領域が低い周波数帯域に限定されてしまうのである。
つまり、ハイブリッド軸受を用いたスピンドルでも、高い周波数の振動に対しては、静圧空気軸受を用いた場合と同じである。
一方、モータの発生するトルクは回転方向だけに変動なく作用する理想的なトルクではなく、微小ではあるが回転軸方向に作用している。また、特にスピンドルを駆動するモータは一般的に多極多層のモータで、1回転当たりに相切替えを行っていて、この相切替えの際にはトルク変動が起きやすい。つまりモータの発生するトルクには微小な高い周波数のトルク変動もある。そしてモータの発生するトルクの一部がスピンドルの軸受に作用する高い周波数成分の外力となっている。
この外力は微小な力ではあるが、高精度の回転精度を実現する場合には問題になり、従来の静圧空気軸受や、静圧空気軸受と磁気軸受とを併用したハイブリッド軸受では、精密加工機等の加工精度の劣化を招く一因となっていた。
本発明は、上記従来の技術の有する未解決の課題に鑑みてなされたものであり、スピンドルの回転中に軸受部に発生する振動を効果的に低減し、回転精度を大幅に向上できるスピンドル装置を提供することを目的とするものである。
上記目的を達成するため、本発明のスピンドル装置は、静圧空気軸受によって回転支持されたロータ部をモータによって回転させるスピンドル装置において、前記ロータ部の周方向に離間した複数の部位にそれぞれラジアル方向の推力を発生する複数のラジアル方向推力発生手段と、前記ロータ部にスラスト方向の推力を発生するスラスト方向推力発生手段と、前記ロータ部のラジアル方向の外力を検出するラジアル方向外力検出手段と、前記ロータ部のスラスト方向の外力を検出するスラスト方向外力検出手段と、前記ロータ部の回転角度を計測するエンコーダと、前記2つの外力検出手段および前記エンコーダの出力に基づいて、前記ラジアル方向および前記スラスト方向の外力を所定の回転角度ごとに検出し、前記外力を打ち消すように前記複数のラジアル方向推力発生手段および前記スラスト方向推力発生手段をそれぞれ制御する制御手段を有することを特徴とする。
それぞれ静圧空気軸受によって支持された少なくとも2つのロータ部を有し、両ロータ部の間に前記モータが配設されているとよい。
外力検出手段がロータ部の変位を検出する変位センサを有し、前記変位センサの出力と静圧空気軸受の軸受剛性に基づいて外力を検出するように構成されているとよい。
外力検出手段がロータ部の加速度を検出する加速度計を有するものでもよい。
ラジアル方向推力発生手段が電磁石を有し、スラスト方向推力発生手段がボイスコイルモータを有するとよい。
スピンドルの回転中にロータ部にかかるラジアル方向およびスラスト方向の外力と、これらの外力が作用する回転角度を検出して、前記外力を打ち消す2方向の推力を、電磁石等を用いた推力発生手段によって、エンコーダの出力に基づくタイミングで発生させる。エンコーダによって検知する角度位置ごとに外力を相殺することにより、高周波数から低周波数まであらゆる振動成分の原因となる外乱を効果的に排除して、静圧空気軸受の軸受特性を安定化し、スピンドルの回転精度を大幅に向上できる。
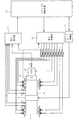
図1は一実施の形態によるスピンドル装置を示すもので、同図の(a)はスピンドルの軸方向に沿った模式断面図、(b)は(a)の矢印Aの方向から見たときの変位センサと電磁石の配置を示す図である。
工作機械の被加工物(ワーク)またはバイト等の加工工具を保持して回転させるスピンドルは、第1および第2のロータ部1a、1bを有し、ラジアル方向の静圧空気軸受パッド2a、2b、2c、スラスト方向の静圧空気軸受パッド3a、3bからなる静圧空気軸受によって回転自在に支持され、駆動手段であるモータ4によって回転駆動される。スピンドルヘッド側のロータ部1aの外周上には、ラジアル方向の変位を検出する2個の変位センサ5a、5bが図1の(b)に示すように位相を周方向に90°ずらした角度に配置されている。また、スピンドルヘッド側にはラジアル方向に推力を発生させる4個のラジアル方向推力発生手段である電磁石6a〜6dが図1の(b)に示すように位相をロータ部1aの周方向に90°ずらした角度に配置されている。同様に、スピンドルテール側のロータ部1bの外周上にもラジアル方向の変位を検出する2個の変位センサ7a、7bが位相を90°ずらした角度に配置され、また、ラジアル方向に推力を発生させる4個のラジアル方向推力発生手段である電磁石8a〜8dが位相を90°ずらした角度に配置されている。
さらに、スピンドルテール側には、スピンドルの回転角度を計測するエンコーダ9、スピンドルのスラスト方向に推力を発生させるスラスト方向推力発生手段であるボイスコイルモータ10、スラスト方向の変位を検出する変位センサ11等が配設されている。
このように、スピンドルは2つのロータ部1a、1bに分割され、その間にモータ4が組み込まれていて、モータ4をスピンドルのモーメント中心に配置している。ロータ部1a、1bは静圧空気軸受パッド2a〜2cによってラジアル方向に支持され、静圧空気軸受パッド3a、3bによってスラスト方向に支持され、ロータ部1a、1bはモータ4によって一体的に回転させられる。回転しているスピンドルヘッド側でラジアル方向の振動を変位センサ5a、5bで検出し、テール側でのラジアル方向の振動を変位センサ7a、7bで検出する。また、スラスト方向の振動を変位センサ11で検出し、エンコーダ9により回転中のスピンドルの角度位置を検出する。
電磁石6a〜6dはスピンドルヘッド側でラジアル方向に推力を与え、電磁石8a〜8dはスピンドルテール側でラジアル方向に推力を与える。そして、ボイスコイルモータ10でスラスト方向に推力を与える構成になっている。
図2は上記のスピンドルを制御するスピンドル装置制御系を示す図である。前述のように、スピンドルヘッド側の電磁石6b、6dは、図1の(b)に示すように電磁石6a、6cと位相90°ずらした角度に配置されている。同様にスピンドルテール側の電磁石8b、8dは電磁石8a、8cと位相90°ずらした角度に配置されている。また、スピンドルヘッド側の変位センサ5bは図1の(b)に示すように変位センサ5aと位相90°ずらした角度に配置されていて、スピンドルテール側の変位センサ7bも変位センサ7aと位相90°ずらした角度に配置されている。
各変位センサ5a、5b、7a、7b、11とともにラジアル方向外力検出手段およびスラスト方向外力検出手段を構成する外力推定器12は、変位センサ5a、5b、7a、7b、11によるそれぞれの変位信号および静圧空気軸受の軸受剛性と、エンコーダ9からの角度信号から、各変位センサ5a、5b、7a、7bにおけるラジアル方向の外力および変位センサ11におけるスラスト方向の外力と、これらの外力が作用する回転角度を検出する。制御手段である推力制御器13は、外力を検出した角度位置ごとにこれらの外力を打ち消すように、電磁石6a〜6d、電磁石8a〜8dとボイルコイルモータ10で発生させる推力を制御する。モータ制御器14は、モータ4によってスピンドルの回転速度を制御する。
スピンドル制御装置15は、外力推定器12、推力制御器13、モータ制御器14を使ってスピンドル装置を制御する。駆動装置16a〜16dは前述のように推力制御器13からの指令を受け、スピンドルヘッド側の電磁石6a〜6dで推力を発生させる。駆動装置17a〜17dも同様に推力制御器13からの指令を受け、スピンドルテール側の電磁石8a〜8dで推力を発生させる。そして、駆動装置18はボイルコイルモータ10を駆動する。
モータ制御器14によってモータ4にトルクを発生し、スピンドルのロータ部1a、1bを一体的に回転させる。この時のスピンドルの振動は主に回転軸に働く外力と静圧空気軸受の軸受剛性との関係で決定される。
回転中に働く外力の発生源としてモータ4の発生するトルクの他成分が考えられる。すなわち、モータ4で発生するトルクの一部がスピンドルのラジアル方向およびスラスト方向に作用している。また、モータ4は1回転中に相の切替えを行いながらトルクを発生しているため、相の切替え時のトルク変動を起している。このトルク変動があるとスピンドルのラジアル方向およびスラスト方向に作用する外力は、主軸回転数の数倍以上の高い周波数成分をもつ。例えば、3相8極の構造のモータを使用した場合、相切替えは1回転中に24回になり、回転数を3000rpmとすると1200Hzと高い周波数振動成分になる。
こうした高い周波数の外力によるスピンドルのラジアル方向の振動は図3の(a)に示すように検出される。スピンドルヘッド側では変位センサ5a、5bによって検出され、スピンドルテール側では変位センサ7a、7bによって検出される。例えば振動を変位センサ5aからみたY方向の変位とスピンドルの回転角度(角度位置)との関係は図3の(b)に示すようになり、波形W1として検出される。すなわち、スピンドルの角度ごとにY方向に加わる外力が変化して、波形W1が検出される。例えば回転角度θ1の時にY方向に作用した外力F1が作用してP1の変位が生じている。
そこで、回転角度θ1と作用する外力F1を求めて、図4の(b)に示すように、エンコーダ9の出力に基づくスピンドルの角度位置がθ1の時にY方向に電磁石6a、6cによって推力G1を発生させ、外力F1を打ち消すことで、角度θ1におけるスピンドルのY方向の変位P1を変位P2へと抑制できる。このように外力が作用する角度ごとに、発生させる推力を制御することで、Y方向の変位の波形W1を波形W2へと抑制できる。X方向も同様に外力が作用する角度ごとに推力を制御することで、変位を抑制できる。
このようにして、ラジアル方向の振動は図4の(a)に示すように抑制される。スピンドルヘッド側のY方向の推力は図4の(a)に示す電磁石6a、6cで発生させ、X方向の推力は電磁石6b、6dで発生させる。同様に、スピンドルテール側のY方向の推力は電磁石8a、8cで発生させ、X方向の推力は電磁石8b、8dで発生させる。
スラスト方向の振動も、同様に角度ごとに作用する外力を変位センサ11で検出した変位から推定し、それを打ち消す推力をボイスコイルモータ10で発生させることで小さくできる。
本実施の形態においては、スラスト方向への推力は押し引きできるボイスコイルモータ10で行っているが、ラジアル方向と同じように電磁石を使用しても、同様の効果が得られる。
上記の制御方式においては、回転角度に同期した外力の計測と、推力の発生が必要になるため、外力推定器12はエンコーダ9の角度信号をトリガとして、変位センサ5a、5b、7a、7b、11のそれぞれのデータを取り込み、そのデータに基づいて外力を検出する。また、推力制御器13はエンコーダ9の角度信号をトリガとして制御推力信号を出力する。
スピンドル制御装置15は以下のシーケンスによってスピンドル制御を行う。
<シーケンス1>
先ず、スピンドル制御装置15は、モータ制御器14を使用してスピンドルを使用回転数で回転させる。
先ず、スピンドル制御装置15は、モータ制御器14を使用してスピンドルを使用回転数で回転させる。
<シーケンス2>
スピンドルの回転数が安定したら、スピンドル制御装置15は、外力推定器12を用いて先ずエンコーダ9と変位センサ5a、5b、7a、7b、11より、所定の回転角度ごとに各変位センサの配置された角度でのラジアル方向スラスト方向の変位を検出し、検出した変位と既知の静圧空気軸受の剛性から、各変位センサで検出している方向に作用した外力を推定する。
スピンドルの回転数が安定したら、スピンドル制御装置15は、外力推定器12を用いて先ずエンコーダ9と変位センサ5a、5b、7a、7b、11より、所定の回転角度ごとに各変位センサの配置された角度でのラジアル方向スラスト方向の変位を検出し、検出した変位と既知の静圧空気軸受の剛性から、各変位センサで検出している方向に作用した外力を推定する。
<シーケンス3>
シーケンス2で推定した2方向の外力とこれらが作用する角度位置との関係に基づいて、推力制御器13から、電磁石6a〜6d、8a〜8dおよびボイスコイルモータ10にて前記外力を打ち消す推力指令を出力する。
シーケンス2で推定した2方向の外力とこれらが作用する角度位置との関係に基づいて、推力制御器13から、電磁石6a〜6d、8a〜8dおよびボイスコイルモータ10にて前記外力を打ち消す推力指令を出力する。
各推力指令が、駆動装置16a〜16d、17a〜17d、18で増幅され、電磁石6a〜6d、電磁石8a〜8dとボイスコイルモータ10によって、スピンドルに推力が発生する。
シーケンス3において発生する推力は、シーケンス2で推測した外力に等しくなる必要があり、シーケンス2とシーケンス3におけるスピンドルの状態の安定性が必要になるが、本実施の形態のように静圧空気軸受を用いた場合は、再現性が高いので問題ない。
シーケンス3よって発生する推力の応答性は、各電磁石やボイスコイルモータの駆動装置の応答性を高めることで向上し、高い周波数の外力に対しても効果を発揮できる。
上記の実施の形態においては、外力を推定する手段として、変位センサで検出した変位をベースに外力を推定する例を述べたが、変位センサの代わりに加速度計を用いて検出した加速度から求める方式を採用してもよい。
1a、1b ロータ部
2a〜2c、3a、3b 静圧空気軸受パッド
4 モータ
5a、5b、7a、7b、11 変位センサ
6a〜6d、8a〜8d 電磁石
9 エンコーダ
10 ボイスコイルモータ
12 外力推定器
13 推力制御器
14 モータ制御器
15 スピンドル制御装置
2a〜2c、3a、3b 静圧空気軸受パッド
4 モータ
5a、5b、7a、7b、11 変位センサ
6a〜6d、8a〜8d 電磁石
9 エンコーダ
10 ボイスコイルモータ
12 外力推定器
13 推力制御器
14 モータ制御器
15 スピンドル制御装置
Claims (5)
- 静圧空気軸受によって回転支持されたロータ部をモータによって回転させるスピンドル装置において、前記ロータ部の周方向に離間した複数の部位にそれぞれラジアル方向の推力を発生する複数のラジアル方向推力発生手段と、前記ロータ部にスラスト方向の推力を発生するスラスト方向推力発生手段と、前記ロータ部のラジアル方向の外力を検出するラジアル方向外力検出手段と、前記ロータ部のスラスト方向の外力を検出するスラスト方向外力検出手段と、前記ロータ部の回転角度を計測するエンコーダと、前記2つの外力検出手段および前記エンコーダの出力に基づいて、前記ラジアル方向および前記スラスト方向の外力を所定の回転角度ごとに検出し、前記外力を打ち消すように前記複数のラジアル方向推力発生手段および前記スラスト方向推力発生手段をそれぞれ制御する制御手段を有することを特徴とするスピンドル装置。
- それぞれ静圧空気軸受によって支持された少なくとも2つのロータ部を有し、両ロータ部の間に前記モータが配設されていることを特徴とする請求項1記載のスピンドル装置。
- 外力検出手段がロータ部の変位を検出する変位センサを有し、前記変位センサの出力と静圧空気軸受の軸受剛性に基づいて外力を検出するように構成されていることを特徴とする請求項1または2記載のスピンドル装置。
- 外力検出手段がロータ部の加速度を検出する加速度計を有することを特徴とする請求項1または2記載のスピンドル装置。
- ラジアル方向推力発生手段が電磁石を有し、スラスト方向推力発生手段がボイスコイルモータを有することを特徴とする請求項1ないし4いずれか1項記載のスピンドル装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003355817A JP2005121114A (ja) | 2003-10-16 | 2003-10-16 | スピンドル装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003355817A JP2005121114A (ja) | 2003-10-16 | 2003-10-16 | スピンドル装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005121114A true JP2005121114A (ja) | 2005-05-12 |
Family
ID=34613247
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003355817A Pending JP2005121114A (ja) | 2003-10-16 | 2003-10-16 | スピンドル装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005121114A (ja) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101184310B1 (ko) * | 2010-08-13 | 2012-09-21 | 한국기계연구원 | 능동 보정형 스핀들과 이를 이용한 회전 정밀도 보정 방법, 및 이를 구비하는 가공장치 |
| CN103537717A (zh) * | 2013-08-02 | 2014-01-29 | 华中科技大学 | 一种摆动式变倾角非圆切削机构及其数控车床 |
| JP2014132509A (ja) * | 2013-01-03 | 2014-07-17 | Seagate Technology Llc | スピンドル力アクチュエータ |
| JP2014527136A (ja) * | 2011-07-21 | 2014-10-09 | シーメンス アクティエンゲゼルシャフト | 回転機械の運転方法 |
| US9995596B2 (en) | 2012-02-01 | 2018-06-12 | Seagate Technology Llc | Spindle force actuator |
| KR20180096528A (ko) * | 2017-02-20 | 2018-08-29 | 한양대학교 에리카산학협력단 | 초고속 스핀들 장치 |
| CN111889699A (zh) * | 2020-08-05 | 2020-11-06 | 中国人民解放军国防科技大学 | 一种高刚度、大行程的快速刀具伺服装置 |
| CN114251363A (zh) * | 2020-09-24 | 2022-03-29 | 武汉科技大学 | 一种适用于真空环境条件下主动控制的气体静压电主轴 |
| CN114962451A (zh) * | 2022-05-07 | 2022-08-30 | 中国船舶重工集团公司第七一九研究所 | 推力轴承 |
| JP2023030668A (ja) * | 2021-08-23 | 2023-03-08 | 芝浦機械株式会社 | エアスピンドル装置 |
| CN116026576A (zh) * | 2023-03-24 | 2023-04-28 | 山东普鲁特机床有限公司 | 一种高精度车铣复合加工中心性能试验台 |
| KR20250098579A (ko) * | 2023-12-22 | 2025-07-01 | (주)미래컴퍼니 | 스핀들 유닛 및 이를 포함하는 웨이퍼 가공 장치 |
-
2003
- 2003-10-16 JP JP2003355817A patent/JP2005121114A/ja active Pending
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101184310B1 (ko) * | 2010-08-13 | 2012-09-21 | 한국기계연구원 | 능동 보정형 스핀들과 이를 이용한 회전 정밀도 보정 방법, 및 이를 구비하는 가공장치 |
| JP2014527136A (ja) * | 2011-07-21 | 2014-10-09 | シーメンス アクティエンゲゼルシャフト | 回転機械の運転方法 |
| US9494046B2 (en) | 2011-07-21 | 2016-11-15 | Siemens Aktiengesellschaft | Method for operating a rotary machine |
| US9995596B2 (en) | 2012-02-01 | 2018-06-12 | Seagate Technology Llc | Spindle force actuator |
| JP2014132509A (ja) * | 2013-01-03 | 2014-07-17 | Seagate Technology Llc | スピンドル力アクチュエータ |
| CN103537717A (zh) * | 2013-08-02 | 2014-01-29 | 华中科技大学 | 一种摆动式变倾角非圆切削机构及其数控车床 |
| KR20180096528A (ko) * | 2017-02-20 | 2018-08-29 | 한양대학교 에리카산학협력단 | 초고속 스핀들 장치 |
| KR102074568B1 (ko) * | 2017-02-20 | 2020-03-02 | 한양대학교 에리카산학협력단 | 초고속 스핀들 장치 |
| CN111889699A (zh) * | 2020-08-05 | 2020-11-06 | 中国人民解放军国防科技大学 | 一种高刚度、大行程的快速刀具伺服装置 |
| CN114251363A (zh) * | 2020-09-24 | 2022-03-29 | 武汉科技大学 | 一种适用于真空环境条件下主动控制的气体静压电主轴 |
| CN114251363B (zh) * | 2020-09-24 | 2024-05-03 | 武汉科技大学 | 一种适用于真空环境条件下主动控制的气体静压电主轴 |
| JP2023030668A (ja) * | 2021-08-23 | 2023-03-08 | 芝浦機械株式会社 | エアスピンドル装置 |
| JP7637600B2 (ja) | 2021-08-23 | 2025-02-28 | 芝浦機械株式会社 | エアスピンドル装置 |
| CN114962451A (zh) * | 2022-05-07 | 2022-08-30 | 中国船舶重工集团公司第七一九研究所 | 推力轴承 |
| CN116026576A (zh) * | 2023-03-24 | 2023-04-28 | 山东普鲁特机床有限公司 | 一种高精度车铣复合加工中心性能试验台 |
| CN116026576B (zh) * | 2023-03-24 | 2023-06-20 | 山东普鲁特机床有限公司 | 一种高精度车铣复合加工中心性能试验台 |
| KR20250098579A (ko) * | 2023-12-22 | 2025-07-01 | (주)미래컴퍼니 | 스핀들 유닛 및 이를 포함하는 웨이퍼 가공 장치 |
| KR102842393B1 (ko) | 2023-12-22 | 2025-08-06 | (주)미래컴퍼니 | 스핀들 유닛 및 이를 포함하는 웨이퍼 가공 장치 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5197614B2 (ja) | 工作機械 | |
| JP5645423B2 (ja) | 回転駆動装置及びロボットアーム | |
| JP2005121114A (ja) | スピンドル装置 | |
| CN103769945B (zh) | 颤振抑制方法和机床 | |
| JP4896153B2 (ja) | 機械要素ないし加工物の振動低下方法 | |
| JP2000158282A (ja) | 工作機械の主軸頭及び主軸頭の制振方法 | |
| US6886436B2 (en) | Method and device for damping a chatter oscillation in a processing machine | |
| JP5369718B2 (ja) | 工作機械 | |
| JPH07180724A (ja) | 磁気軸受装置 | |
| KR101209752B1 (ko) | 모터 주축의 진동 저감장치 | |
| JP4353610B2 (ja) | 工作機械用の磁気軸受装置 | |
| JP2009285777A (ja) | スピンドル装置 | |
| JP2000005977A (ja) | 工作機械の制御装置 | |
| JP2002144101A (ja) | 振動切削加工装置及び方法 | |
| JP4559912B2 (ja) | 磁気軸受装置 | |
| JP2001277059A (ja) | 回転テーブル | |
| JPH05157114A (ja) | スピンドル装置 | |
| JP2000167739A (ja) | 工作機械 | |
| KR102763546B1 (ko) | 치과용 보철물 가공 장치의 가공툴 접촉 감지 방법 | |
| JP2531837Y2 (ja) | 高速静圧気体軸受装置 | |
| JP5729967B2 (ja) | 工作機械の主軸装置、及び工作機械主軸装置の軸受与圧制御方法 | |
| JPH11254205A (ja) | 工作機械における主軸の支持方法及び工作機械の主軸ヘッド | |
| JP2004150489A (ja) | 磁気軸受装置 | |
| JPH106113A (ja) | 小径穴加工用自動ボール盤 | |
| US6992416B2 (en) | Bearing device |