JP2005155507A - 可変圧縮比内燃機関の制御装置及び制御方法 - Google Patents
可変圧縮比内燃機関の制御装置及び制御方法 Download PDFInfo
- Publication number
- JP2005155507A JP2005155507A JP2003396439A JP2003396439A JP2005155507A JP 2005155507 A JP2005155507 A JP 2005155507A JP 2003396439 A JP2003396439 A JP 2003396439A JP 2003396439 A JP2003396439 A JP 2003396439A JP 2005155507 A JP2005155507 A JP 2005155507A
- Authority
- JP
- Japan
- Prior art keywords
- compression ratio
- target
- throttle opening
- knock limit
- intake air
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images























Landscapes
- Output Control And Ontrol Of Special Type Engine (AREA)
Abstract
【解決手段】 アクセル開度に応じて目標圧縮比を設定するとともに(S1)、目標スロットル開度を設定する(S2)。アクセル開度に応じて要求トルク低下量を演算する(S3)。要求トルク低下量に応じて、目標圧縮比又は目標スロットル開度の一方を低下側に補正する(S4)。
【選択図】 図3
Description
tTVO:目標スロットル開度
rAPO:アクセル開度
ステップ3では、図5に示すサブルーチンにより、要求トルク低下量を算出する(要求トルク低下量演算手段)。図5を参照して、ステップ301では、アクセル開度から図8に示す要求トルク演算マップを検索して要求トルクを演算する。ステップ302では、アクセル開度の前回値に対する減少量が所定値より大きいかを判定する。ステップ303及びステップ308では、減速状態を表すフラグfGENSOKUがセットされているかを判定する。このフラグがセットされている場合には減速中であることを意味する。減速開始時には、ステップ302が肯定、ステップ303が否定されてステップ304〜306が実行される。ステップ304では、要求トルクの前回値を減速前の要求トルクとして記憶させる。ステップ305では、前回演算した要求トルク低下量の値を要求トルク低下量として保持する。ステップ306では、上記のフラグfGENSOKUをセットする。減速中(減速開始時を除く減速継続中)の場合には、ステップ302及びステップ303がともに肯定されてステップ307へ進み、減速前の要求トルクから要求トルクの現在値を減算した値を要求トルク低下量として設定・記憶する。減速終了時には、ステップ302が否定、ステップ308が肯定されて、ステップ309及びステップ310が実行される。ステップ309では、減速前の要求トルクから、要求トルクの現在値を減算した値を要求トルク低下量とする。ステップ310では、減速中を表すfGENSOKUをリセットする。例えば機関加速時や定速走行時のように減速以外の運転状態では、ステップ302及びステップ308がともに否定されてステップ311へ進み、要求トルク低下量を0(ゼロ)とする。
Pc_s:過給圧平衡値
Δt:サンプリング時間
τ:過給応答遅れ時定数
Δtは定数であり、演算間隔に相当する。τは、定数としても良いし、運転状態に応じて変化させても良い。z−1は、1演算遅れを表す演算子である。
yTe_d = Te_s×(Pc_s/Pc_d) …(3)
yTe_d:エンジントルク推定値
Te_s:エンジントルク平衡値
Pc_s:過給圧平衡値
Pc_d:実過給圧
ステップ45では、エンジントルク推定値(実トルク推定値)に基づいて、図15に示すノック限界圧縮比推定マップを検索して、ノック限界圧縮比(上限圧縮比)を求める(ノック限界圧縮比演算手段)。
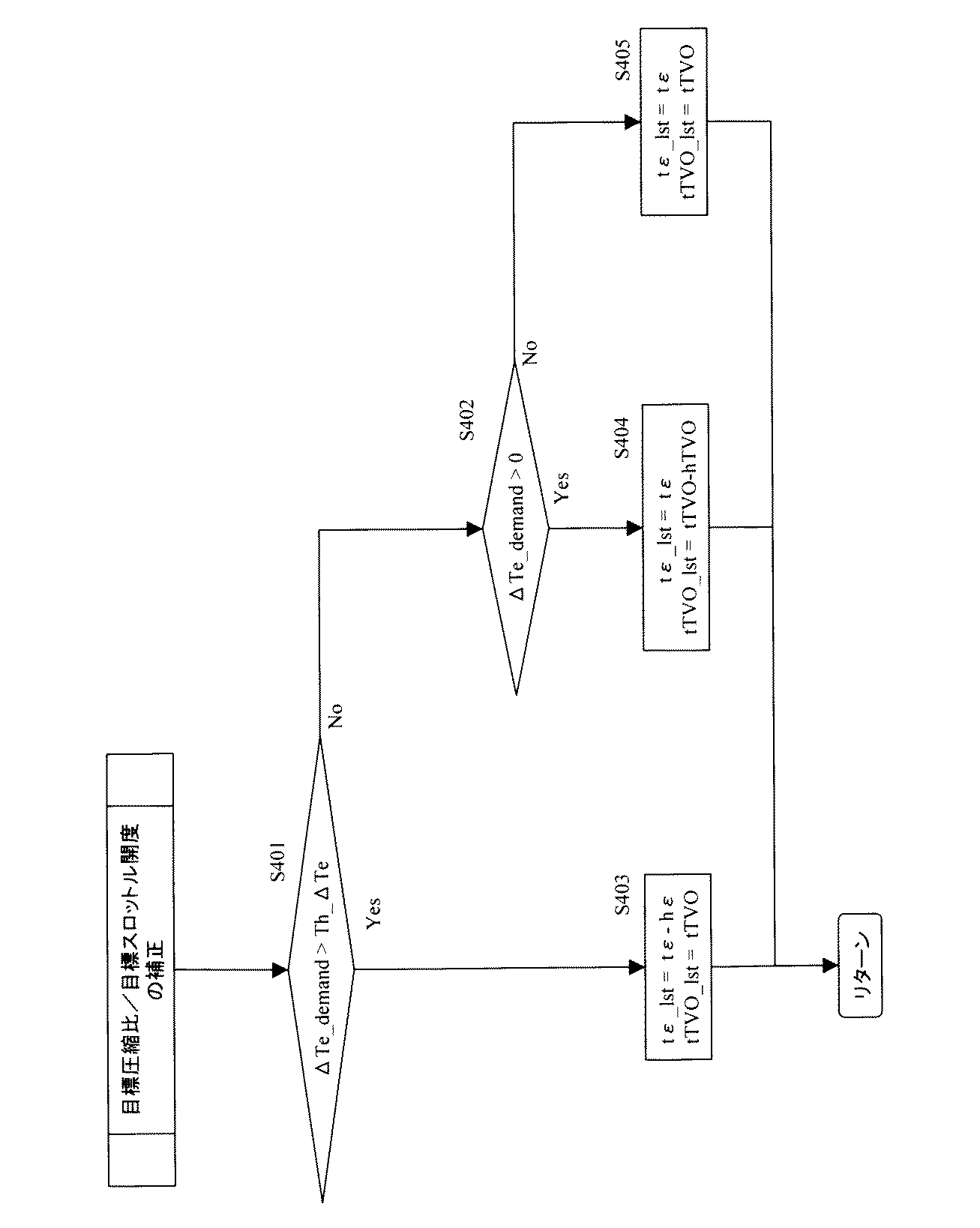
tε_lst = tε−(tε−tε_lim)× Kε …(4)
tε:補正前の目標圧縮比
tε_lst:補正後の目標圧縮比
tε_lim:ノック限界圧縮比
Kε:目標圧縮比補正係数
再び図9及び図10を参照して、ステップ15では、補正後の最終的な目標圧縮比tε_lstに対応する指令信号を圧縮比制御アクチュエータ13へ出力し、機関圧縮比を目標圧縮比tε_lstへ向けて制御する(圧縮比制御手段)。
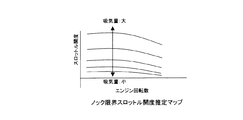
Qa_na_lim = Qa_c_lim×(Pa/Pc_d) …(5)
Qa_na_lim:ノック限界スロットル開度推定マップ検索用吸気量
Qa_c_lim:ノック限界吸気量
Pa:大気圧
Pc_d:実過給圧
Paは大気圧相当の定数を与えても良い。
Qa_na_lim:ノック限界スロットル開度推定マップ検索用吸気量
Qa_c_lim:ノック限界吸気量
Pa:大気圧
Pc_d:過給圧
Paは大気圧相当の定数を与えても良い。
tTVO_lst=tTVO−(tTVO−tTVO_lim)×Ktvo …(7)
tTVO:補正前の目標スロットル開度
tTVO_lst:補正後の目標スロットル開度
tTVO_lim:ノック限界スロットル開度
Ktvo:目標スロットル開度補正係数
再び図18及び図19を参照して、ステップ25では、補正後の最終的な目標スロットル開度tTVO_lstに対応する指令信号をスロットル弁9のアクチュエータへ出力し、スロットル開度を目標スロットル開度tε_lstへ向けて制御する(スロットル制御手段)。
アクセル開度に応じて目標圧縮比を設定する目標圧縮比設定手段と、上記目標圧縮比に応じて機関圧縮比を制御する圧縮比制御手段と、アクセル開度に応じて目標スロットル開度を設定する目標スロットル開度設定手段と、上記目標スロットル開度に応じてスロットル開度を制御するスロットル制御手段と、アクセル開度が低下する機関減速中に、上記目標圧縮比又は目標スロットル開度の少なくとも一方を一時的に低下側へ補正する補正手段と、を有する。
第1発明において、更に、要求トルク低下量を演算する要求トルク低下量演算手段を有している。上記補正手段は、要求トルク低下量が所定値よりも大きい場合には、目標圧縮比のみを一時的に低下側へ補正し、要求トルク低下量が所定値よりも小さい場合には、目標スロットル開度のみを一時的に低下側へ補正する。
第1発明において、更に、要求トルク低下量を演算する要求トルク低下量演算手段と、上記要求トルク低下量に応じて、目標圧縮比を低下側へ補正する目標圧縮比補正手段と、実圧縮比を検出する実圧縮比検出手段と、上記実圧縮比に基づいてノック限界に相当するノック限界吸気量を演算するノック限界吸気量演算手段と、上記ノック限界吸気量に基づいて、目標スロットル開度を制限する目標スロットル開度制限手段と、を有する。
第3発明の目標圧縮比補正手段が、アクセル開度に基づいて実過給圧を推定する実過給圧推定手段と、上記目標スロットル開度制限手段による制限前の目標スロットル開度に基づいて、エンジントルクが定常的に安定するエンジントルク平衡値を演算する平衡トルク演算手段と、上記エンジントルク平衡値と実過給圧とに基づいて、エンジントルク推定値を推定するトルク推定手段と、上記エンジントルク推定値に基づいて、ノック限界に相当するノック限界圧縮比を演算するノック限界圧縮比演算手段と、を有し、上記要求トルク低下量とノック限界圧縮比とに基づいて、目標圧縮比を補正する。
第1発明において、更に、要求トルク低下量を演算する要求トルク低下量演算手段と、要求トルク低下量に応じて、目標スロットル開度を低下側へ補正する目標スロットル開度補正手段と、実吸気量を検出する実吸気量検出手段と、実吸気量に基づいて、ノック限界に相当するノック限界圧縮比を演算するノック限界圧縮比演算手段と、上記ノック限界圧縮比に基づいて目標圧縮比を制限する目標圧縮比制限手段と、を有する。
第5発明の目標スロットル開度補正手段が、アクセル開度に基づいて実過給圧を推定する過給圧推定手段と、上記目標圧縮比制限手段による制限前の目標圧縮比に基づいて、ノック限界に相当するノック限界吸気量を演算するノック限界吸気量演算手段と、上記ノック限界吸気量及び実過給圧とに基づいて、ノック限界に相当するノック限界スロットル開度を演算するノック限界スロットル開度演算手段と、を有し、上記要求トルク低下量とノック限界スロットル開度とに基づいて、目標スロットル開度を補正する。
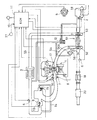
クランクシャフトのクランクピンに回転可能に嵌合するロアリンクと、このロアリンクとピストンとを連係するアッパリンクと、ロアリンクに一端が連結された制御リンクと、を有し、この制御リンクを介してロアリンクの運動拘束条件を変化させることにより機関圧縮比を可変とする可変圧縮比機構を有する。
吸気量の調整は、スロットル弁によるスロットル開度のみに限らず、例えば吸気弁や排気弁のバルブタイミングやバルブリフト特性を変更する可変動弁機構によっても行うことができ、このようなものにも上述した発明を適用することができる。従って、上述した説明での「スロットル開度」を、「バルブタイミング」,「バルブリフト特性」、あるいは下記の第8発明のように広義に「吸気量」と置き換えても良い。
11…エンジンコントロールモジュール
13…圧縮比制御アクチュエータ
51…ターボ過給機
Claims (9)
- アクセル開度に応じて目標圧縮比を設定する目標圧縮比設定手段と、
上記目標圧縮比に応じて機関圧縮比を制御する圧縮比制御手段と、
アクセル開度に応じて目標スロットル開度を設定する目標スロットル開度設定手段と、
上記目標スロットル開度に応じてスロットル開度を制御するスロットル制御手段と、
アクセル開度が低下する機関減速中に、上記目標圧縮比又は目標スロットル開度の少なくとも一方を一時的に低下側へ補正する補正手段と、
を有する可変圧縮比内燃機関の制御装置。 - 要求トルク低下量を演算する要求トルク低下量演算手段を有し、
上記補正手段は、要求トルク低下量が所定値よりも大きい場合には、目標圧縮比のみを一時的に低下側へ補正し、要求トルク低下量が所定値よりも小さい場合には、目標スロットル開度のみを一時的に低下側へ補正する請求項1に記載の可変圧縮比内燃機関の制御装置。 - 要求トルク低下量を演算する要求トルク低下量演算手段と、
上記要求トルク低下量に応じて、目標圧縮比を低下側へ補正する目標圧縮比補正手段と、
実圧縮比を検出する実圧縮比検出手段と、
上記実圧縮比に基づいてノック限界に相当するノック限界吸気量を演算するノック限界吸気量演算手段と、
上記ノック限界吸気量に基づいて、目標スロットル開度を制限する目標スロットル開度制限手段と、
を有する請求項1に記載の可変圧縮比内燃機関の制御装置。 - 上記目標圧縮比補正手段が、
アクセル開度に基づいて実過給圧を推定する実過給圧推定手段と、
上記目標スロットル開度制限手段による制限前の目標スロットル開度に基づいて、エンジントルクが定常的に安定するエンジントルク平衡値を演算する平衡トルク演算手段と、
上記エンジントルク平衡値と実過給圧とに基づいて、エンジントルク推定値を推定するトルク推定手段と、
上記エンジントルク推定値に基づいて、ノック限界に相当するノック限界圧縮比を演算するノック限界圧縮比演算手段と、を有し、
上記要求トルク低下量とノック限界圧縮比とに基づいて、目標圧縮比を補正する請求項3に記載の可変圧縮比内燃機関の制御装置。 - 要求トルク低下量を演算する要求トルク低下量演算手段と、
要求トルク低下量に応じて、目標スロットル開度を低下側へ補正する目標スロットル開度補正手段と、
実吸気量を検出する実吸気量検出手段と、
実吸気量に基づいて、ノック限界に相当するノック限界圧縮比を演算するノック限界圧縮比演算手段と、
上記ノック限界圧縮比に基づいて目標圧縮比を制限する目標圧縮比制限手段と、
を有する請求項1に記載の可変圧縮比内燃機関の制御装置。 - 上記目標スロットル開度補正手段が、
アクセル開度に基づいて実過給圧を推定する過給圧推定手段と、
上記目標圧縮比制限手段による制限前の目標圧縮比に基づいて、ノック限界に相当するノック限界吸気量を演算するノック限界吸気量演算手段と、
上記ノック限界吸気量と実過給圧とに基づいて、ノック限界に相当するノック限界スロットル開度を演算するノック限界スロットル開度演算手段と、を有し、
上記要求トルク低下量とノック限界スロットル開度とに基づいて、目標スロットル開度を補正する請求項5に記載の可変圧縮比内燃機関の制御装置。 - クランクシャフトのクランクピンに回転可能に嵌合するロアリンクと、このロアリンクとピストンとを連係するアッパリンクと、ロアリンクに一端が連結された制御リンクと、を有し、この制御リンクを介してロアリンクの運動拘束条件を変化させることにより機関圧縮比を可変とする可変圧縮比機構を有する請求項1〜6のいずれかに記載の可変圧縮比内燃機関の制御装置。
- アクセル開度に応じて目標圧縮比を設定する目標圧縮比設定手段と、
上記目標圧縮比に応じて機関圧縮比を制御する圧縮比制御手段と、
アクセル開度に応じて目標吸気量を設定する目標吸気量設定手段と、
上記目標吸気量に応じて吸気量を制御する吸気量制御手段と、
アクセル開度が低下する機関減速中に、上記目標圧縮比又は目標吸気量の少なくとも一方を一時的に低下側へ補正する補正手段と、
を有する可変圧縮比内燃機関の制御装置。 - 少なくともアクセル開度に応じて目標圧縮比及び目標スロットル開度を設定し、
アクセル開度が低下する機関減速中に、上記目標圧縮比又は目標スロットル開度の少なくとも一方を一時的に低下側へ補正し、
補正後の目標圧縮比及び目標スロットル開度へ向けて機関圧縮比及びスロットル開度を制御する、可変圧縮比内燃機関の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003396439A JP4269909B2 (ja) | 2003-11-27 | 2003-11-27 | 可変圧縮比内燃機関の制御装置及び制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003396439A JP4269909B2 (ja) | 2003-11-27 | 2003-11-27 | 可変圧縮比内燃機関の制御装置及び制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005155507A true JP2005155507A (ja) | 2005-06-16 |
| JP4269909B2 JP4269909B2 (ja) | 2009-05-27 |
Family
ID=34721887
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003396439A Expired - Fee Related JP4269909B2 (ja) | 2003-11-27 | 2003-11-27 | 可変圧縮比内燃機関の制御装置及び制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4269909B2 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009060789A1 (ja) * | 2007-11-06 | 2009-05-14 | Toyota Jidosha Kabushiki Kaisha | 火花点火式内燃機関 |
| JP2013050093A (ja) * | 2011-08-31 | 2013-03-14 | Mazda Motor Corp | 自動車用エンジンの制御装置 |
| WO2013061684A1 (ja) * | 2011-10-24 | 2013-05-02 | 日産自動車株式会社 | 内燃機関の回転速度制御装置及び回転速度制御方法 |
| WO2014046059A1 (ja) * | 2012-09-21 | 2014-03-27 | 日立オートモティブシステムズ株式会社 | 内燃機関の制御装置及び方法 |
| WO2014174969A1 (ja) * | 2013-04-23 | 2014-10-30 | 日産自動車株式会社 | 内燃機関の制御装置及び制御方法 |
| WO2017002254A1 (ja) * | 2015-07-02 | 2017-01-05 | 日産自動車株式会社 | 内燃機関の制御方法及び制御装置 |
| CN107923321A (zh) * | 2015-08-20 | 2018-04-17 | 日产自动车株式会社 | 发动机的控制装置以及发动机的控制方法 |
| CN116608054A (zh) * | 2023-06-16 | 2023-08-18 | 长城汽车股份有限公司 | 降低发动机爆震频次的控制方法、装置、车辆及存储介质 |
| JP2026052757A (ja) * | 2024-09-12 | 2026-03-25 | 本田技研工業株式会社 | 内燃機関の制御装置 |
-
2003
- 2003-11-27 JP JP2003396439A patent/JP4269909B2/ja not_active Expired - Fee Related
Cited By (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2434156C1 (ru) * | 2007-11-06 | 2011-11-20 | Тойота Дзидося Кабусики Кайся | Двигатель внутреннего сгорания с искровым зажиганием |
| US8413618B2 (en) | 2007-11-06 | 2013-04-09 | Toyota Jidosha Kabushiki Kaisha | Spark ignition type internal combustion engine |
| WO2009060789A1 (ja) * | 2007-11-06 | 2009-05-14 | Toyota Jidosha Kabushiki Kaisha | 火花点火式内燃機関 |
| JP2013050093A (ja) * | 2011-08-31 | 2013-03-14 | Mazda Motor Corp | 自動車用エンジンの制御装置 |
| US9284893B2 (en) | 2011-10-24 | 2016-03-15 | Nissan Motor Co., Ltd. | Apparatus and method for controlling rotation speed of internal combustion engine |
| WO2013061684A1 (ja) * | 2011-10-24 | 2013-05-02 | 日産自動車株式会社 | 内燃機関の回転速度制御装置及び回転速度制御方法 |
| CN103874839A (zh) * | 2011-10-24 | 2014-06-18 | 日产自动车株式会社 | 内燃机的转速控制装置以及转速控制方法 |
| JPWO2013061684A1 (ja) * | 2011-10-24 | 2015-04-02 | 日産自動車株式会社 | 内燃機関の回転速度制御装置及び回転速度制御方法 |
| CN103874839B (zh) * | 2011-10-24 | 2016-08-31 | 日产自动车株式会社 | 对内燃机转速进行控制的装置以及方法 |
| WO2014046059A1 (ja) * | 2012-09-21 | 2014-03-27 | 日立オートモティブシステムズ株式会社 | 内燃機関の制御装置及び方法 |
| JP2014062498A (ja) * | 2012-09-21 | 2014-04-10 | Hitachi Automotive Systems Ltd | 内燃機関の制御装置 |
| CN104603427A (zh) * | 2012-09-21 | 2015-05-06 | 日立汽车系统株式会社 | 内燃机的控制装置及方法 |
| RU2618146C1 (ru) * | 2013-04-23 | 2017-05-02 | Ниссан Мотор Ко., Лтд. | Устройство управления двигателем внутреннего сгорания и способ управления |
| US9784190B2 (en) | 2013-04-23 | 2017-10-10 | Nissan Motor Co., Ltd. | Internal combustion engine control device and control method |
| JP6015853B2 (ja) * | 2013-04-23 | 2016-10-26 | 日産自動車株式会社 | 内燃機関の制御装置及び制御方法 |
| CN105121816A (zh) * | 2013-04-23 | 2015-12-02 | 日产自动车株式会社 | 内燃机的控制装置以及控制方法 |
| WO2014174969A1 (ja) * | 2013-04-23 | 2014-10-30 | 日産自動車株式会社 | 内燃機関の制御装置及び制御方法 |
| CN105121816B (zh) * | 2013-04-23 | 2017-06-30 | 日产自动车株式会社 | 内燃机的控制装置以及控制方法 |
| KR101848598B1 (ko) | 2015-07-02 | 2018-04-12 | 닛산 지도우샤 가부시키가이샤 | 내연 기관의 제어 방법 및 제어 장치 |
| CN107709738B (zh) * | 2015-07-02 | 2019-03-26 | 日产自动车株式会社 | 内燃机的控制方法以及控制装置 |
| JPWO2017002254A1 (ja) * | 2015-07-02 | 2018-03-08 | 日産自動車株式会社 | 内燃機関の制御方法及び制御装置 |
| WO2017002254A1 (ja) * | 2015-07-02 | 2017-01-05 | 日産自動車株式会社 | 内燃機関の制御方法及び制御装置 |
| CN107709738A (zh) * | 2015-07-02 | 2018-02-16 | 日产自动车株式会社 | 内燃机的控制方法以及控制装置 |
| RU2670343C1 (ru) * | 2015-07-02 | 2018-10-22 | Ниссан Мотор Ко., Лтд. | Способ управления и устройство управления для двигателя внутреннего сгорания |
| EP3318739A4 (en) * | 2015-07-02 | 2018-08-29 | Nissan Motor Co., Ltd. | Control method and control device for internal combustion engine |
| US10087855B2 (en) | 2015-07-02 | 2018-10-02 | Nissan Motor Co., Ltd. | Control method and control device for internal combustion engine |
| EP3339611A4 (en) * | 2015-08-20 | 2018-08-15 | Nissan Motor Co., Ltd. | Engine control device and engine control method |
| CN107923321B (zh) * | 2015-08-20 | 2019-03-22 | 日产自动车株式会社 | 发动机的控制装置以及发动机的控制方法 |
| CN107923321A (zh) * | 2015-08-20 | 2018-04-17 | 日产自动车株式会社 | 发动机的控制装置以及发动机的控制方法 |
| US10344684B2 (en) | 2015-08-20 | 2019-07-09 | Nissan Motor Co., Ltd. | Control device of engine and control method of engine |
| CN116608054A (zh) * | 2023-06-16 | 2023-08-18 | 长城汽车股份有限公司 | 降低发动机爆震频次的控制方法、装置、车辆及存储介质 |
| JP2026052757A (ja) * | 2024-09-12 | 2026-03-25 | 本田技研工業株式会社 | 内燃機関の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4269909B2 (ja) | 2009-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4650321B2 (ja) | 制御装置 | |
| US10683797B2 (en) | Waste gate valve control method and control device | |
| EP2511501A1 (en) | Variable compression ratio engine control apparatus | |
| JP4135488B2 (ja) | エンジンの吸気制御装置 | |
| JP4269909B2 (ja) | 可変圧縮比内燃機関の制御装置及び制御方法 | |
| JP2016113933A (ja) | 内燃機関の制御装置 | |
| JP4300312B2 (ja) | 可変圧縮比内燃機関の制御装置及び制御方法 | |
| JP4438368B2 (ja) | 可変圧縮比エンジンの制御装置 | |
| WO2017002254A1 (ja) | 内燃機関の制御方法及び制御装置 | |
| JP4415464B2 (ja) | 可変圧縮比装置付ターボ過給内燃機関 | |
| JP2005016381A (ja) | 可変圧縮比機構付き内燃機関の始動制御装置 | |
| JP4244790B2 (ja) | 可変圧縮比内燃機関及びその制御方法 | |
| JP4277623B2 (ja) | 可変圧縮比機構付き内燃機関の点火時期制御装置 | |
| JPH0692757B2 (ja) | 内燃機関のバイパス空気量制御方法 | |
| JP4241351B2 (ja) | 可変圧縮比内燃機関の制御装置及び制御方法 | |
| JP2004156464A (ja) | 内燃機関の圧縮比制御装置 | |
| JP4432759B2 (ja) | 車両用内燃機関の制御装置 | |
| JP4536342B2 (ja) | 可変圧縮比機構付き内燃機関の制御装置 | |
| JP5263249B2 (ja) | 過給機付き内燃機関の可変バルブタイミング制御装置 | |
| JP2004346917A (ja) | 内燃機関制御装置 | |
| JP2006046297A (ja) | ハイブリッド車の制御装置 | |
| JP2005127200A (ja) | 内燃機関の制御装置 | |
| EP3339611B1 (en) | Engine control device and engine control method | |
| JP2005030253A (ja) | 可変圧縮比機構付き内燃機関の制御装置 | |
| JP4466059B2 (ja) | 可変圧縮比機構付き内燃機関の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061025 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080828 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080902 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081104 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090203 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090216 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120306 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4269909 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120306 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130306 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130306 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |