JP2005189042A - 水中構造物,作業船等の移動体の誘導・位置決め方法 - Google Patents
水中構造物,作業船等の移動体の誘導・位置決め方法 Download PDFInfo
- Publication number
- JP2005189042A JP2005189042A JP2003429307A JP2003429307A JP2005189042A JP 2005189042 A JP2005189042 A JP 2005189042A JP 2003429307 A JP2003429307 A JP 2003429307A JP 2003429307 A JP2003429307 A JP 2003429307A JP 2005189042 A JP2005189042 A JP 2005189042A
- Authority
- JP
- Japan
- Prior art keywords
- rtk
- gps
- positioning
- gps devices
- moving body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Navigation (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
【課題】構造物または作業船の3ヵ所にRTK−GPSを3台設置することで、測位の精度向上を図ることと、側位できない状態の防止を可能とした水中構造物,作業船等の移動体の誘導・位置決め方法を提供する。
【解決手段】この発明の実施形態では、特に図1及び図2に示すように移動体10上に3台のRTK−GPS13A,14A,15Aを設置して、RTK−GPS13A,14A、RTK−GPS13A,15A、RTK−GPS14A,15Aの3通りに組合せを替えて算出される位置データの平均に大幅なずれがない場合には、各々のRTK−GPS13A,14A,15Aは、安定した状態で側位が行われており、高精度の状態であると判断出来る。このように、3台のRTK−GPS13A,14A,15Aが全て高精度な状態では、組合せを替えて求まった位置を平均化することにより、側位精度の向上を図ることが出来るものである。
【選択図】 図2
【解決手段】この発明の実施形態では、特に図1及び図2に示すように移動体10上に3台のRTK−GPS13A,14A,15Aを設置して、RTK−GPS13A,14A、RTK−GPS13A,15A、RTK−GPS14A,15Aの3通りに組合せを替えて算出される位置データの平均に大幅なずれがない場合には、各々のRTK−GPS13A,14A,15Aは、安定した状態で側位が行われており、高精度の状態であると判断出来る。このように、3台のRTK−GPS13A,14A,15Aが全て高精度な状態では、組合せを替えて求まった位置を平均化することにより、側位精度の向上を図ることが出来るものである。
【選択図】 図2
Description
この発明は、水中構造物,作業船等の移動体の誘導・位置決め方法に係わり、更に詳しくは構造物または作業船の3ヵ所に設置した3台のRTK−GPSを3通りに組合せることにより、測位の精度向上を図ることと、側位ができない状態の防止を可能とした水中構造物,作業船等の移動体の誘導・位置決め方法に関するものである。
従来、水上または海上において、ケーソン、作業船等の高精度な誘導・位置決めには、RTK−GPS(リアルタイムキネマティック−グローバルポジショニングシステム)とジャイロコンパスで行うか、または2台のRTK−GPSを用いて1台でケーソン上のある1点の位置を求め、他の1台で方向を求める方法が行われている。
また、海上において大規模な埋めた工事を行う際に航行水域管理システムを行う場合に、2台のGPSを用いる方法も知られている(例えば、特許文献1参照)。
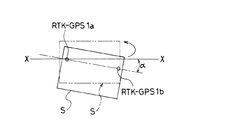
ところで、上記のような従来のケーソン位置誘導システムとしては、例えば、図3に示すように、大型水中構造物(ケーソン)または作業船等の移動体Sの法線上等に設置した2台のRTK−GPS1a,1b(GPSアンテナ)により、位置や方向性を算出して測位を求めていた。
即ち、位置算出用のRTK−GPS1aと、方向算出用のRTK−GPS1bの2台で求めた方向角αにより、大型水中構造物(ケーソン)または作業船等の求めるべき位置X−Xを求める。大型水中構造物(ケーソン)の場合には、四隅の設計位置に対するズレを求めで表示し、また作業船(地盤改良船)の場合には、設計位置に対する改良位置と方向のズレを求めて表示する。
然しながら、RTK−GPS(リアルタイムキネマティック−グローバルポジショニングシステム)は、電源を入れるだけでキャリブレーション等の特別な操作を行うことなく、側位結果が直ちに得られるため様々な工事に採用されているが、それ自身で側位状態(単独側位、Float 、FIX)を表示(データ出力)しているので、内部での演算処理で行われている計測状態や、その計測過程が目に見えないことからFIX状態であることを示しているにもかかわらず、マルチパス(乱反射して入ってくる電波)等によって、実際には誤ったFIX解が求まった状態でも異常に気付かない場合がある。
従って、2台のRTK−GPSを用いる際には、2台共に初期化が完了し、高精度な状態(FIX状態)でない限り正確な位置や方向を求めることが出来ない。即ち、「誤ったFIX解が求まった状態」では、高さ(Z方向の座標)に違いがでるため、側位対象が静止している状態では判断可能であるが、移動体Sの側位を行っている場合には判別が難しい。
仮に「誤ったFIX解が求まった状態」であることが判明しても回避するには、RTK−GPS受信機の電源をリセットするか、正しいFIX解が求まるまで待つしかなく、この間、数分間ではあるが、側位ができない状態となる問題があった。
そこで、バックアップ用の機材として、図4に示すように、RTK−GPSを更に2台追加してRTK−GPSを2セット、即ち、RTK−GPS1a,1b、RTK−GPS2a,2bで運用し、一方のRTK−GPSに不具合が生じた場合には、他方のRTK−GPSに切り替えて使用することも考えされているが、この場合には、RTK−GPSの移動局は4台となり、組合せも2通りとなって、構造が複雑になると共に、切り替え制御においても、手間がかかる等の問題があった。
特開2001−319300号公報
この発明はかかる従来の問題点に着目し、構造物または作業船の3ヵ所にRTK−GPSを3台設置することで、測位の精度向上を図ることが出来ると共に、側位ができない状態を防止することを可能とした水中構造物,作業船等の移動体の誘導・位置決め方法を提供することを目的とするものである。
この発明は上記目的を達成するため、構造物または作業船等の移動体の3ヵ所に設置した位置と方向性をリアルタイムで求めるRTK−GPSを3通りに組合せて平均測位データを求め、前記移動体を所定位置に誘導及び位置決めすることを要旨とするものである。
ここで、前記移動体の3ヵ所に設置したRTK−GPSに異常があるか否かを検出し、異常がある場合には、その異常があるRTK−GPSを除いた2ヵ所に設置したRTK−GPSによって平均測位データを求めて誘導及び位置決めすることも可能である。
この発明は、上記のように構造物または作業船等の移動体の3ヵ所に設置した位置と方向性をリアルタイムで求めるRTK−GPSを3通りに組合せて平均測位データを求め、前記移動体を所定位置に誘導及び位置決めするようにしたので、組合せの平均を取ることにより精度向上を図ることができる効果があり、また1ヵ所のRTK−GPSに異常が発生しても、他の2ヵ所のRTK−GPSを使用して誘導及び位置決めをすることが出来る効果がある。
以下、添付図面に基づき、この発明の実施形態を説明する。
図1は、この発明の水中構造物,作業船等の移動体の誘導・位置決め方法を実施するための概略構成図を示し、10は水中構造物(ケーソン)または作業船等の移動体、11は陸上既知点、12は曳航船または沈設作業船等を示し、前記移動体10上には、3台のRTK−GPS13A,14A,15Aを構成するRTK−GPS衛生受信アンテナ13a,14a,15aと、これらにそれぞれ接続する3台のRTK−GPS受信機13b,14b,15bが三角形状の配置で設置してある。
また、前記各RTK−GPS受信機13b,14b,15bは、送信制御装置16に接続し、この送信制御装置16に送信アンテナ17を備えたSS無線機18に接続されている。
また、前記陸上既知点11には、RTK−GPS衛生受信アンテナ19を設置し、このRTK−GPS衛生受信アンテナ19にRTK−GPS受信機20を接続し、更にRTK−GPS受信機20に送信制御機21が接続してあり、送信制御機21には小電力無線局としての送信ドーム22が接続してある。
前記移動体10には、前記送信ドーム22からの既知点の補正データを受ける受信アンテナ23を設置し、この受信アンテナ23に特定小電力無線局としての受信装置24を接続し、この受信装置24を前記各RTK−GPS13A,14A,15AのRTK−GPS受信機13b,14b,15bに接続してある。
また、前記曳航船または沈設作業船12には、前記送信アンテナ17に対応する受信アンテナ25を備えたSS無線機26を設置し、このSS無線機26には、コンピュータ27が接続されている。
このようにして、移動体10に設置した3台のRTK−GPS衛生受信アンテナ13a,14a,15aは、GPS衛生から受ける経度,緯度,及び高度等の位置情報を受け、各RTK−GPS受信機13b,14b,15bはこれに基づいて各位置座標入力を送信制御装置16に送り、陸上既知点11からの既知点の補正テータを受信アンテナ23が受け、既知点の補正テータとして各RTK−GPS受信機13b,14b,15bに入力して補正を行う。
前記各RTK−GPS受信機13b,14b,15bから位置座標入力を受けた送信制御装置16は、SS無線機18及び送信アンテナ17により、位置座標データを曳航船または沈設作業船12の受信アンテナ25及びSS無線機26に送り、このSS無線機26からデータを受けるコンピュータ27では、移動体10の誘導及び位置決めの計算を行って移動体10の姿勢制御を行うものである。
この発明の実施形態では、特に図1及び図2に示すように移動体10上に3台のRTK−GPS13A,14A,15Aを設置して、RTK−GPS13A,14A、RTK−GPS13A,15A、RTK−GPS14A,15Aの3通りに組合せを替えて算出される位置データの平均に大幅なずれがない場合には、各々のRTK−GPS13A,14A,15Aは、安定した状態で側位が行われており、高精度の状態であると判断出来る。
このように、3台のRTK−GPS13A,14A,15Aが全て高精度な状態では、組合せを替えて求まった位置を平均化することにより、側位精度の向上を図ることが出来るものである。
また、3台のRTK−GPS13A,14A,15Aのうち、1台がZ方向の座標に異常があり、高精度な状態(FIX状態)ではないと判断した場合には、側位できない異常のRTK−GPSを除き、2台のRTK−GPSを選択して切り替えることで対応させることができる。
即ち、この発明では構造物または作業船等の移動体10の3ヵ所にRTK−GPS13A,14A,15Aを3台設置し、この3台の位置と方向を求めるRTK−GPS13A,14A,15Aを任意に組合せることにより、組合せの平均を取ることにより精度向上を図ることが可能となる。
また、3台のRTK−GPS13A,14A,15Aの一つに異常がある場合には、その異常のあるRTK−GPSを除き、他の2台のRTK−GPSを組み替えて使用することにより、移動体10の誘導及び位置決めができ、側位ができない状態を防止することが出来る。
10 水中構造物(ケーソン)または作業船等の移動体
11 陸上既知点 12 曳航船または沈設作業船等
13A,14A,15A RTK−GPS
13a,14a,15a RTK−GPS衛生受信アンテナ
13b,14b,15b RTK−GPS受信機
16 送信制御装置 17 送信アンテナ
18 SS無線機 19 RTK−GPS衛生受信アンテナ
20 RTK−GPS受信機 21 送信制御機
22 送信ドーム 23 受信アンテナ
24 受信装置 25 受信アンテナ
26 SS無線機 27 コンピュータ
1a,1b RTK−GPS 2a,2b RTK−GPS S 移動体 α 方向角
X−X 求めるべき位置
11 陸上既知点 12 曳航船または沈設作業船等
13A,14A,15A RTK−GPS
13a,14a,15a RTK−GPS衛生受信アンテナ
13b,14b,15b RTK−GPS受信機
16 送信制御装置 17 送信アンテナ
18 SS無線機 19 RTK−GPS衛生受信アンテナ
20 RTK−GPS受信機 21 送信制御機
22 送信ドーム 23 受信アンテナ
24 受信装置 25 受信アンテナ
26 SS無線機 27 コンピュータ
1a,1b RTK−GPS 2a,2b RTK−GPS S 移動体 α 方向角
X−X 求めるべき位置
Claims (2)
- 水中または海中に設置する構造物や水上または海上の作業船を、複数台のGPSによるリアルタイム測位で得られた測位データにより所定位置に誘導及び位置決めを行う水中構造物,作業船等の移動体の誘導・位置決め方法において、
前記構造物または作業船等の移動体の3ヵ所に設置した位置と方向性をリアルタイムで求めるRTK−GPSを3通り組合せて平均測位データを求め、前記移動体を所定位置に誘導及び位置決めする水中構造物,作業船等の移動体の誘導・位置決め方法。 - 前記移動体の3ヵ所に設置したRTK−GPSに異常があるか否かを検出し、異常がある場合には、その異常があるRTK−GPSを除いた2ヵ所に設置したRTK−GPSによって平均測位データを求めて誘導及び位置決めする請求項1に記載の水中構造物,作業船等の移動体の誘導・位置決め方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003429307A JP2005189042A (ja) | 2003-12-25 | 2003-12-25 | 水中構造物,作業船等の移動体の誘導・位置決め方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003429307A JP2005189042A (ja) | 2003-12-25 | 2003-12-25 | 水中構造物,作業船等の移動体の誘導・位置決め方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005189042A true JP2005189042A (ja) | 2005-07-14 |
Family
ID=34788014
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003429307A Pending JP2005189042A (ja) | 2003-12-25 | 2003-12-25 | 水中構造物,作業船等の移動体の誘導・位置決め方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005189042A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008014721A (ja) * | 2006-07-04 | 2008-01-24 | Hitachi Industrial Equipment Systems Co Ltd | 姿勢算出装置、および、姿勢算出方法 |
| JP2008210378A (ja) * | 2007-01-30 | 2008-09-11 | Komatsu Ltd | 無人車両の誘導走行制御装置 |
| WO2013002861A2 (en) | 2011-04-06 | 2013-01-03 | Javad Gnss, Inc. | Gnss surveying receiver with multiple rtk engines |
| US10408944B2 (en) | 2016-01-29 | 2019-09-10 | Javad Gnss, Inc. | Hybrid RTK |
-
2003
- 2003-12-25 JP JP2003429307A patent/JP2005189042A/ja active Pending
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008014721A (ja) * | 2006-07-04 | 2008-01-24 | Hitachi Industrial Equipment Systems Co Ltd | 姿勢算出装置、および、姿勢算出方法 |
| JP2008210378A (ja) * | 2007-01-30 | 2008-09-11 | Komatsu Ltd | 無人車両の誘導走行制御装置 |
| WO2013002861A2 (en) | 2011-04-06 | 2013-01-03 | Javad Gnss, Inc. | Gnss surveying receiver with multiple rtk engines |
| CN103649776A (zh) * | 2011-04-06 | 2014-03-19 | 佳瓦特Gnss公司 | 具有多个rtk引擎的gnss测量接收器 |
| JP2014516408A (ja) * | 2011-04-06 | 2014-07-10 | ジャバド ジーエヌエスエス, インコーポレイテッド | 複数のrtkエンジンを有するgnss測量受信機 |
| EP2694997A4 (en) * | 2011-04-06 | 2014-08-20 | Javad Gnss Inc | GNSS MONITOR RECEIVER WITH SEVERAL RTK ENGINES |
| US8872700B2 (en) | 2011-04-06 | 2014-10-28 | Javad Gnss, Inc. | GNSS surveying receiver with multiple RTK engines |
| CN103649776B (zh) * | 2011-04-06 | 2015-11-25 | 佳瓦特Gnss公司 | 具有多个rtk引擎的gnss测量接收器 |
| US10408944B2 (en) | 2016-01-29 | 2019-09-10 | Javad Gnss, Inc. | Hybrid RTK |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6941226B2 (en) | Method for determining, recording and sending GPS location data in an underwater environment | |
| Specht et al. | Application of an autonomous/unmanned survey vessel (ASV/USV) in bathymetric measurements | |
| AU2014281920B2 (en) | Pile driving machine | |
| KR102263185B1 (ko) | 차량의 위치 결정 방법 | |
| US9772403B2 (en) | Vehicle position validation | |
| CN105066993A (zh) | Lbl/mins组合导航系统及其导航信息融合方法 | |
| KR101596937B1 (ko) | 앵커를 이용한 해양 관측 부이 위치 제공 시스템 및 그 방법 | |
| CN103529466A (zh) | 一种两个ais参考点的船舶自主定位方法 | |
| JP7003830B2 (ja) | 通信状態制御システム | |
| CN110727282A (zh) | Auv的对接方法、装置及水下对接系统 | |
| CN109669203A (zh) | 一种gnss三维姿态定位打桩导航辅助系统和方法 | |
| JP2005189042A (ja) | 水中構造物,作業船等の移動体の誘導・位置決め方法 | |
| TWI838007B (zh) | 船舶環境風險即時控管導航系統及其運作方法 | |
| KR100976965B1 (ko) | 네비게이션 장치 및 이의 위치 결정 방법 | |
| CN113495286B (zh) | 一种船舶入坞过程的位置和姿态计算方法 | |
| WO2017141614A1 (ja) | 津波観測装置、津波観測システム、津波観測方法 | |
| CN112591010B (zh) | 一种自适应海况的航标 | |
| Lee et al. | GNSS fault detection and mitigation using Android IMU | |
| JP6218450B2 (ja) | シャドーイング判定装置および運行支援装置 | |
| RU2431156C1 (ru) | Способ определения координат посредством гидроакустической навигационной системы | |
| CN211977915U (zh) | 一种实时潮位的确定装置 | |
| CN111780743A (zh) | 水下挖沟敷缆机的定位系统和定位方法 | |
| US8543268B2 (en) | Cumulative lateral slide indication | |
| Tomczak | Modern methods of underwater positioning applied in subsea mining | |
| KR102765608B1 (ko) | 다중 환경 지원 통합 측위 시스템 |