JP2005199882A - 車両用走行状態安定化装置 - Google Patents
車両用走行状態安定化装置 Download PDFInfo
- Publication number
- JP2005199882A JP2005199882A JP2004008670A JP2004008670A JP2005199882A JP 2005199882 A JP2005199882 A JP 2005199882A JP 2004008670 A JP2004008670 A JP 2004008670A JP 2004008670 A JP2004008670 A JP 2004008670A JP 2005199882 A JP2005199882 A JP 2005199882A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- outer ring
- equivalent member
- stabilization device
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/60—Load
- B60G2400/63—Location of the center of gravity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2326/00—Articles relating to transporting
- F16C2326/01—Parts of vehicles in general
- F16C2326/02—Wheel hubs or castors
Landscapes
- Force Measurement Appropriate To Specific Purposes (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
- Rolling Contact Bearings (AREA)
Abstract
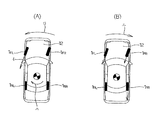
【解決手段】 旋回走行時に前後左右の車輪に加わるグリップ力と、車体41に加わる横加速度とにより、上記重心Gの位置Lf や質量を求める。これら重心Gの位置Lf や質量に応じて、各車輪に加える制動力を調節し、上記乗員数や積載量の相違に拘らず、上記ABSやTCS等の制御をより適切に行なえる様にして、上記課題を解決する。
【選択図】 図1
Description
nc ={1−(d・cosα/D)・(ni /2)}+{1+(d・cosα/D)・(no /2)} --- (1)
このうちのグリップ力測定手段は、車両の旋回走行時に路面とタイヤとの当接面に働くグリップ力を求める為のものである。
又、上記横加速度測定手段は、上記車両に対して横方向に加わる横加速度を求める為のものである。
又、上記演算器は、上記横加速度と上記グリップ力とに基づいて、上記車両の質量及び重心位置を算出するものである。
更に、上記制御器は、上記演算器が算出した車両の質量及び重心位置に基づいて、車両の走行安定性を確保する為の制御を行なうものである。
即ち、演算器が、グリップ力測定手段が求めたグリップ力と、横加速度測定手段が求めた横加速度とに基づいて、車両の質量及び重心位置を算出し、この質量及び重心位置に基づいて、車両の走行安定性を確保する為の制御を行なう為、この質量及び重心位置に基づいた最適の制御を行なう事ができ、高度の走行安定性を確保できる。
しかも、本発明の場合には、上記グリップ力と上記横加速度とにより、上記質量及び重心位置を求める為、前述の特許文献1等に記載された構造を利用して、各車輪に加わる荷重を直接求める場合に比べ、上記質量及び重心位置を求める為の構造を低コストで実現できる。
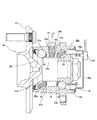
この場合に例えば、請求項3に記載した様に、転がり軸受ユニットを構成する転動体の公転速度の変化に基づいて、この転がり軸受ユニットを構成する外輪相当部材と内輪相当部材との間に加わるアキシアル荷重を求め、このアキシアル荷重をグリップ力とする。
この様に構成すれば、このグリップ力を容易に、且つ十分な精度で求められる。
このうちの外輪相当部材は、内周面に複列の外輪軌道を有する。
又、上記内輪相当部材は、上記外輪相当部材の内径側にこの外輪相当部材と同心に配置されたもので、外周面に複列の内輪軌道を有する。
又、上記各転動体は、これら両内輪軌道と上記両外輪軌道との間に接触角を付与された状態で、各列毎に複数個ずつ設けられている。
又、上記各保持器は、上記各列の転動体を転動自在に保持している。
又、上記第一、第二の公転速度検出用エンコーダは、上記両保持器に全周に亙って設けられたもので、被検出面の特性を円周方向に関して交互に且つ等間隔に変化させている。 又、上記第一、第二の公転速度検出用センサは、上記両公転速度検出用エンコーダに対向する状態で設けられたもので、上記各列の転動体の公転速度である上記保持器の回転速度を検出する。
更に、上記第二の演算器は、上記両公転速度検出用センサから送り込まれる、上記各列の転動体の公転速度を表す検出信号に基づいて、上記外輪相当部材と上記内輪相当部材との間に加わるアキシアル荷重を算出するものである。
この場合に、例えば請求項5に記載した様に、上記第二の演算器は、各列の転動体の公転速度の比に基づいてアキシアル荷重を算出する。
この様に構成すれば、上記第一、第二の公転速度検出用センサの検出信号のみで、車輪の回転速度変化に拘らず、上記アキシアル荷重、延ては上記グリップ力を求められる。
或は、請求項6に記載した様に、外輪相当部材と内輪相当部材とのうちで車輪と共に回転する回転輪の回転速度を検出する為の回転速度検出用センサを備える。そして、上記第二の演算器は、各列の転動体の公転速度の差と上記回転速度との比に基づいて、上記アキシアル荷重を算出する。
この様に構成すれば、車輪の回転速度変化に拘らず、上記アキシアル荷重、延ては上記グリップ力を精度良く求められる。
或は、請求項8に記載した様に、上記横加速度測定手段を、車両に作用するヨーレートを検出する為、この車両に設けられたヨーレートセンサと、この車両の走行速度を検出する為の速度センサとから構成する。
この様に構成すれば、車両に対して横方向に加わる横加速度を、正確に求められる。

2FL、2FR、2RL、2RR 回転速度センサ
3FL、3FR、3RL、3RR ブレーキ装置
4 ブレーキペダル
5 マスタシリンダ
6 油圧制御ユニット
7 制御器
8 ステアリングホイール
9 舵角センサ
10 加速度センサ
11 ヨーレートセンサ
12 車体
13、13a 外輪
14、14a ハブ
15、15a 回転側フランジ
16 ハブ本体
17 ナット
18 内輪
19 外輪軌道
20 内輪軌道
21a、21b 転動体
22、22a 取付孔
23 変位センサ
24 センサリング
25、25a、25b 回転速度検出用エンコーダ
26、26a カバー
27、27a、27b 回転速度検出用センサ
28 ナックル
29 固定側フランジ
30 ボルト
31 ねじ孔
32 荷重センサ
33 センサユニット
34 先端部
35a、35b 公転速度検出用センサ
36a、36b 保持器
37a、37b 公転速度検出用エンコーダ
38 車両
39 前輪
40 後輪
41 車体
42 路面
Claims (8)
- 車両の旋回走行時に路面とタイヤとの当接面に働くグリップ力を求める為のグリップ力測定手段と、上記車両に対して横方向に加わる横加速度を求める為の横加速度測定手段と、この横加速度と上記グリップ力とに基づいて上記車両の質量及び重心位置を算出する演算器と、この演算器が算出した車両の質量及び重心位置に基づいて車両の走行安定性を確保する為の制御を行なう制御器とを備えた車両用走行状態安定化装置。
- 懸架装置に車輪を回転自在に支持する為の転がり軸受ユニット部分にグリップ力測定手段を組み込んだ、請求項1に記載した車両用走行状態安定化装置。
- 転がり軸受ユニットを構成する転動体の公転速度の変化に基づいて、この転がり軸受ユニットを構成する外輪相当部材と内輪相当部材との間に加わるアキシアル荷重を求め、このアキシアル荷重をグリップ力とする、請求項2に記載した車両用走行状態安定化装置。
- 内周面に複列の外輪軌道を有する外輪相当部材と、この外輪相当部材の内径側にこの外輪相当部材と同心に配置された、外周面に複列の内輪軌道を有する内輪相当部材と、これら両内輪軌道と上記両外輪軌道との間に接触角を付与された状態で、各列毎に複数個ずつ設けられた転動体と、これら各列の転動体を転動自在に保持した1対の保持器と、これら両保持器に全周に亙って設けられた、被検出面の特性を円周方向に関して交互に且つ等間隔に変化させた第一、第二の公転速度検出用エンコーダと、これら両公転速度検出用エンコーダに対向する状態で設けられ、上記各列の転動体の公転速度である上記保持器の回転速度を検出する第一、第二の公転速度検出用センサと、これら両公転速度検出用センサから送り込まれる、上記各列の転動体の公転速度を表す検出信号に基づいて、上記外輪相当部材と上記内輪相当部材との間に加わるアキシアル荷重を算出する第二の演算器とを備えた、請求項3に記載した車両用走行状態安定化装置。
- 第二の演算器は、各列の転動体の公転速度の比に基づいてアキシアル荷重を算出する、請求項4に記載した車両用走行状態安定化装置。
- 外輪相当部材と内輪相当部材とのうちで車輪と共に回転する回転輪の回転速度を検出する為の回転速度検出用センサを備え、第二の演算器は、各列の転動体の公転速度の差と上記回転速度との比に基づいてアキシアル荷重を算出する、請求項4に記載した車両用走行状態安定化装置。
- 横加速度測定手段が、車両の横方向に作用する加速度を検出する為、この車両に設けられた加速度センサである、請求項1〜6の何れかに記載した車両用走行状態安定化装置。
- 横加速度測定手段が、車両に作用するヨーレートを検出する為、この車両に設けられたヨーレートセンサと、この車両の走行速度を検出する為の速度センサとである、請求項1〜6の何れかに記載した車両用走行状態安定化装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004008670A JP2005199882A (ja) | 2004-01-16 | 2004-01-16 | 車両用走行状態安定化装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004008670A JP2005199882A (ja) | 2004-01-16 | 2004-01-16 | 車両用走行状態安定化装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005199882A true JP2005199882A (ja) | 2005-07-28 |
| JP2005199882A5 JP2005199882A5 (ja) | 2007-03-01 |
Family
ID=34821922
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004008670A Pending JP2005199882A (ja) | 2004-01-16 | 2004-01-16 | 車両用走行状態安定化装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005199882A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2442097A (en) * | 2006-09-28 | 2008-03-26 | Ford Global Tech Llc | Vehicle control response to added mass |
| WO2010082288A1 (ja) | 2009-01-13 | 2010-07-22 | トヨタ自動車株式会社 | 車両状態推定装置 |
| JP2012051425A (ja) * | 2010-08-31 | 2012-03-15 | Advics Co Ltd | 車重推定装置および車両の運転制御装置 |
| CN103625476A (zh) * | 2012-08-21 | 2014-03-12 | 罗伯特·博世有限公司 | 用于驱动车辆的方法、实施该方法的控制和/或调节装置 |
| KR101626163B1 (ko) * | 2010-04-28 | 2016-05-31 | 현대모비스 주식회사 | 차량 자세 제어 방법 |
| JP2018100074A (ja) * | 2016-12-19 | 2018-06-28 | バイドゥ ユーエスエー エルエルシーBaidu USA LLC | 自律走行車の制御特性の決定 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5594541U (ja) * | 1978-12-21 | 1980-06-30 | ||
| JP2002116080A (ja) * | 2000-10-10 | 2002-04-19 | Hino Motors Ltd | 車両質量の推定演算装置 |
| JP2003182555A (ja) * | 2001-12-17 | 2003-07-03 | Toyota Motor Corp | 車輌制御装置 |
| WO2004072598A1 (ja) * | 2003-02-12 | 2004-08-26 | Nsk Ltd. | 転がり軸受ユニットの荷重測定装置及び荷重測定用転がり軸受ユニット |
-
2004
- 2004-01-16 JP JP2004008670A patent/JP2005199882A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5594541U (ja) * | 1978-12-21 | 1980-06-30 | ||
| JP2002116080A (ja) * | 2000-10-10 | 2002-04-19 | Hino Motors Ltd | 車両質量の推定演算装置 |
| JP2003182555A (ja) * | 2001-12-17 | 2003-07-03 | Toyota Motor Corp | 車輌制御装置 |
| WO2004072598A1 (ja) * | 2003-02-12 | 2004-08-26 | Nsk Ltd. | 転がり軸受ユニットの荷重測定装置及び荷重測定用転がり軸受ユニット |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2442097A (en) * | 2006-09-28 | 2008-03-26 | Ford Global Tech Llc | Vehicle control response to added mass |
| GB2442097B (en) * | 2006-09-28 | 2011-02-16 | Ford Global Tech Llc | A method for controlling a vehicle |
| WO2010082288A1 (ja) | 2009-01-13 | 2010-07-22 | トヨタ自動車株式会社 | 車両状態推定装置 |
| US9096232B2 (en) | 2009-01-13 | 2015-08-04 | Toyota Jidosha Kabushiki Kaisha | Vehicle condition estimating device |
| KR101626163B1 (ko) * | 2010-04-28 | 2016-05-31 | 현대모비스 주식회사 | 차량 자세 제어 방법 |
| JP2012051425A (ja) * | 2010-08-31 | 2012-03-15 | Advics Co Ltd | 車重推定装置および車両の運転制御装置 |
| CN103625476A (zh) * | 2012-08-21 | 2014-03-12 | 罗伯特·博世有限公司 | 用于驱动车辆的方法、实施该方法的控制和/或调节装置 |
| JP2018100074A (ja) * | 2016-12-19 | 2018-06-28 | バイドゥ ユーエスエー エルエルシーBaidu USA LLC | 自律走行車の制御特性の決定 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7359787B2 (en) | Stability control apparatus and load measuring instrument for wheel supporting rolling bearing unit | |
| KR20000070352A (ko) | 차량의 기울기상태 검출 방법 및 장치 | |
| JPH11271045A (ja) | 車両の重心高さを表わす値の決定方法及び装置 | |
| JP2001021577A (ja) | 車輪支持用転がり軸受ユニット | |
| US20070029872A1 (en) | Wheel Action Force Detection System and Wheel Action Force Detection Method | |
| JP4292955B2 (ja) | スタビリティコントロール装置 | |
| JP2005199882A (ja) | 車両用走行状態安定化装置 | |
| JP2007271005A (ja) | センサ付き転がり軸受装置 | |
| JP2005321236A (ja) | 転がり軸受ユニットの荷重測定装置 | |
| US20210300112A1 (en) | Upright | |
| JP4487528B2 (ja) | 車輪支持用転がり軸受ユニットの荷重測定装置 | |
| JP2007210463A (ja) | 車両状態量検出装置 | |
| JP4356499B2 (ja) | スタビリティコントロール装置 | |
| JP4935203B2 (ja) | 車輪のトー異常検知装置 | |
| US20060228063A1 (en) | Sensor apparatus and rolling bearing apparatus with sensor | |
| JP2005075264A (ja) | スタビリティコントロール装置 | |
| JP2005291457A (ja) | 玉軸受ユニット | |
| JP4325376B2 (ja) | 車両用姿勢安定化装置 | |
| JP2007050804A (ja) | スタビリティコントロール装置 | |
| JP2005098771A (ja) | 転がり軸受ユニットの荷重測定装置 | |
| JP2005249726A (ja) | 車両用荷重測定装置 | |
| JP2006078359A (ja) | 車両用アキシアル荷重測定装置 | |
| JP2005324721A (ja) | 車両用走行状態安定化装置 | |
| JP2008039589A (ja) | センサ付き転がり軸受装置 | |
| JP2005214744A (ja) | 車輪支持用転がり軸受ユニットの荷重測定装置及び車両用走行安定化装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070111 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070111 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20070111 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080812 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081008 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090303 |