JP2005202087A - 顕微鏡装置、顕微鏡装置の制御方法、及びプログラム - Google Patents
顕微鏡装置、顕微鏡装置の制御方法、及びプログラム Download PDFInfo
- Publication number
- JP2005202087A JP2005202087A JP2004007521A JP2004007521A JP2005202087A JP 2005202087 A JP2005202087 A JP 2005202087A JP 2004007521 A JP2004007521 A JP 2004007521A JP 2004007521 A JP2004007521 A JP 2004007521A JP 2005202087 A JP2005202087 A JP 2005202087A
- Authority
- JP
- Japan
- Prior art keywords
- observation
- objective lens
- region
- target
- area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 122
- 230000003287 optical effect Effects 0.000 claims abstract description 29
- 230000008569 process Effects 0.000 claims description 107
- 230000033001 locomotion Effects 0.000 claims description 50
- 230000008859 change Effects 0.000 claims description 12
- 230000000638 stimulation Effects 0.000 claims description 8
- 230000004936 stimulating effect Effects 0.000 claims description 5
- 230000001678 irradiating effect Effects 0.000 claims description 3
- 238000002474 experimental method Methods 0.000 abstract description 32
- 101150107801 Top2a gene Proteins 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 101100261000 Caenorhabditis elegans top-3 gene Proteins 0.000 description 3
- 230000004888 barrier function Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 230000005284 excitation Effects 0.000 description 3
- 239000002699 waste material Substances 0.000 description 3
- 238000001514 detection method Methods 0.000 description 2
- 238000010187 selection method Methods 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 101150041570 TOP1 gene Proteins 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/36—Microscopes arranged for photographic purposes or projection purposes or digital imaging or video purposes including associated control and data processing arrangements
- G02B21/365—Control or image processing arrangements for digital or video microscopes
- G02B21/367—Control or image processing arrangements for digital or video microscopes providing an output produced by processing a plurality of individual source images, e.g. image tiling, montage, composite images, depth sectioning, image comparison
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/0004—Microscopes specially adapted for specific applications
- G02B21/002—Scanning microscopes
- G02B21/0024—Confocal scanning microscopes (CSOMs) or confocal "macroscopes"; Accessories which are not restricted to use with CSOMs, e.g. sample holders
- G02B21/0036—Scanning details, e.g. scanning stages
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Microscoopes, Condenser (AREA)
Abstract
【解決手段】 制御プログラム2dを実行することによって、コンピュータ2の計算・処理部2aが、共焦点レーザ顕微鏡本体1での観察対象である観察試料108に対して複数設定される観察領域のうち対物レンズ106の合焦位置が位置している観察領域である対象観察領域とその他の当該観察領域との間の距離を算出する処理と、対物レンズ108の光軸に対して垂直な平面上で観察試料108を移動させて、当該観察領域のうち当該観察領域の画像の取得の処理若しくは当該観察領域への刺激の処理が共焦点レーザ顕微鏡本体1によって未だ行われていないものであって且つ当該対象観察領域との間の当該距離が最短であるものを、対物レンズ106の合焦位置に位置させるようにステージ107の移動動作を制御する処理と、を行う。
【選択図】 図1
Description
例えば、特許文献1には、一定時間間隔をおいて光軸方向に亘る複数の試料断層像を共焦点顕微鏡装置で取得して時間間隔毎の試料断層像の差分画像を生成し、この差分画像から試料の擬似三次元像を作成して時間経過に応じて表示させることにより、試料の三次元的な時間変化を観察できるようにする技術が開示されている。
例えば共焦点レーザ走査型顕微鏡装置を用いて多点タイムラプス観察を行う場合には、電動XYステージ装置と電動準焦部とを組み合わせた共焦点レーザ走査型顕微鏡装置へ観察試料における複数の注目領域を操作者が登録しておき、一定の時間間隔で、若しくは予め設定された回数だけ、その注目領域の各々についての画像の取得を繰り返すという実験が行われる。
注目領域の登録は試料上に散布されている細胞の中から操作者が注目領域を探索して行われるが、このとき操作者は電動XYステージ装置や電動準焦部の移動を考慮して探索・登録を行うことはない。そのため、実験を開始すると電動XYステージ装置や電動準焦部の動作に無駄のあることが多く、このような無駄によって実験の所要時間が長くなってしまうという問題を抱えていた。
また、前述した本発明に係る顕微鏡装置において、前述した対物レンズの焦点と前述した観察試料との間の相対的な位置関係を当該対物レンズの光軸方向に変化させる光軸方向移動手段と、前述した観察領域の各々における前述した光軸方向の位置の範囲の設定を取得する観察領域範囲取得手段と、前述した観察領域が前述した対物レンズの合焦位置に位置したときに当該光軸方向移動手段を制御して当該位置関係を変化させて、前述した観察試料に対する当該対物レンズの焦点の位置を、前述した対象観察領域について設定されている当該範囲を特定している一方の境界から他方の境界まで一定の向きに変化させる光軸方向移動制御手段と、を更に有し、前述した対象観察領域処理手段は、当該対象観察領域での当該観察試料に対する当該対物レンズの焦点の位置の変化量が所定の量に達する毎に、当該対象観察領域に対する前述した画像の取得の処理若しくは前述した刺激の処理を行う、ようにしてもよい。
また、本発明の別の態様のひとつである顕微鏡装置は、対物レンズの光軸に対して垂直な平面上で観察試料を移動させる平面移動手段と、当該観察試料に対してなされる複数の観察領域の各々の当該平面上における位置の設定を取得する観察領域位置設定取得手段と、当該対物レンズの合焦位置が位置している当該観察領域である対象観察領域の画像の取得の処理、若しくは当該対象観察領域への刺激の処理を行う対象観察領域処理手段と、当該対象観察領域と他の当該観察領域との間の距離を算出する算出手段と、当該観察領域の全てを当該対物レンズの合焦位置に順次位置させるべく当該観察試料の移動をさせるときに、当該距離に基づく順序であって当該移動の経路長を短くする当該順序で当該観察試料を移動させるように当該平面移動手段を制御する平面移動制御手段と、を有することを特徴とするものである。
また、本発明の更なる別の態様のひとつである顕微鏡装置の制御方法は、顕微鏡装置での観察対象である観察試料に対して複数設定される観察領域のうち当該顕微鏡装置に備えられている対物レンズの合焦位置が位置している観察領域である対象観察領域とその他の当該観察領域との間の距離を算出し、当該対物レンズの光軸に対して垂直な平面上で当該観察試料を移動させて、当該観察領域のうち当該観察領域の画像の取得の処理若しくは当該観察領域への刺激の処理が当該顕微鏡装置によって未だ行われていないものであって且つ当該対象観察領域との間の当該距離が最短であるものを、当該対物レンズの合焦位置に位置させる、ことを特徴とするものである。
また、本発明の更なる別の態様のひとつであるプログラムは、顕微鏡装置での観察対象である観察試料に対して複数設定される観察領域のうち当該顕微鏡装置に備えられている対物レンズの合焦位置が位置している観察領域である対象観察領域とその他の当該観察領域との間の距離を算出する処理と、当該対物レンズの光軸に対して垂直な平面上で当該観察試料を移動させて、当該観察領域のうち当該観察領域の画像の取得の処理若しくは当該観察領域への刺激の処理が当該顕微鏡装置によって未だ行われていないものであって且つ当該対象観察領域との間の当該距離が最短であるものを、当該対物レンズの合焦位置に位置させる処理と、をコンピュータに行わせるためのものである。
図1は、本発明を実施する共焦点レーザ走査型顕微鏡システムの構成を示している。
図1において、共焦点レーザ顕微鏡本体1にはコンピュータ2が接続されている。コンピュータ2には、レーザ光の光源であるレーザ装置4と画像表示のための画像モニタ5とが接続されている。
ステージ107は、レボルバ105に取り付けられている対物レンズ106の光軸に対して垂直な平面(XY平面と称することとする)上で直交するX軸方向とY軸方向とに移動可能な電動XYステージ装置である。なお、走査ユニット104がレーザ光をX軸方向に走査したときにはステージ107でのX軸方向にスポット光が走査され、レーザ光をY軸方向に走査したときにはステージ107でのY軸方向にスポット光が走査されるものとする。
コンピュータ2に接続されている操作パネル3は、キーボードに加え、トラックボールやジョイスティック、あるいはマウス等のポインティングデバイスを有しており、観察者が操作することによって、レーザ光の走査開始命令、画像取得命令、光電変換器101の感度の調整命令などをコンピュータ2に対して行う。
次に、図1に示したシステムにおける計算・処理部2aによって行われる、前述した観察領域の経由順序の決定の手法について説明する。
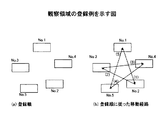
このような順序で観察領域の登録が行われた場合に、多点タイムラプス観察のための実験における観察領域の画像の取得順をこの登録順に従って行うと、図2(b)に矢印で示すような、(1)、(2)、(3)、(4)、(5)の順でその取得が行われる。従来の顕微鏡装置でこの実験を行うと、まさにこのような順序で画像の取得が行われていた。
まず、登録されている観察領域のうち観察を最初に行うもの(「先頭観察領域」と称することとする)を観察者が選択し、操作パネル3を操作してコンピュータ2へ設定する。なお、先頭観察領域を観察者が選択する代わりに、例えば、XY平面で対物レンズ106の現在の合焦位置(以下、単に「観察位置」と称することとする)に最も近い観察領域や、閉じたXY平面における特定の隅に最も近い観察領域などを、制御プログラムの実行によって計算・処理部2aが自動的に先頭観察領域として選択するようにしてもよい。
次に、計算・処理部2aは、先頭観察領域とその他の観察領域との間のXY平面上での距離を算出して比較し、先頭観察領域からの距離が最短である観察領域を選択する。
ここで、「対象観察領域」という語を定義する。対象観察領域とは、ある観察順において観察の対象とされる観察領域を指す。上述した図2(a)の例では、実験を開始したときに対物レンズ106の合焦位置に最初に位置させることとなる先頭の対象観察領域はNo.1の観察領域であり、二番目の対象観察領域はNo.4の観察領域となる。
図2(a)に示した観察領域の例に対して上述したようにして決定された観察領域の観察順を図4に示す。このように、図2(a)の例からは、No.1→No.4→No.2→No.5→No.3の順序が決定される。
まず、S101では、観察者若しくは計算・処理部2a自身によって各観察領域から選択され設定された先頭観察領域を取得し、取得された先頭観察領域を観察順の先頭として設定する処理が行われ、続くS102では、この先頭観察領域を現在の対象観察領域として設定する処理が行われる。
次に図6のフローチャートについて説明する。同図は顕微鏡制御処理の第一の例の処理内容を示している。この処理は、図1に示したシステム全体を制御して多点タイムラプス観察のための実験を行わせる処理であり、前述した制御プログラム2dを計算・処理部2aで実行させると開始される。
S112では、計算・処理部2a自身が有している、時間経過を計時するタイマ(不図示)を起動させて計時を開始させる処理が行われる。
S114では、共焦点レーザ走査型顕微鏡本体1を制御して観察位置に現在位置している対象観察領域の画像の取得(対象観察領域処理)を行わせてメモリ2cに記憶させる処理が行われ、処理完了後にS115に処理を進める。
なお、このS117の判定は、例えば観察者が操作パネル3を操作して終了指示を与えたか否かを判定する。また、その代わりに、例えば観察領域の画像の取得枚数が予め設定されていた所定枚数に達したか否かの判定や、実験開始からの経過時間が予め設定されていた実験の所要時間を経過したか否かの判定を行って自動的にこの処理が終了するようにしてもよい。
S119では、前述したタイマをリセットして計時を再開始させる処理が行われ、その後はS113へ処理を戻し、全ての観察領域について画像の取得が行われていないものとして改めて先頭観察領域から上述した処理が行われる。
次に、本発明の別の実施形態について説明する。なお、以上までに説明した実施形態を「実施例1」と称することとし、これより説明する実施形態を「実施例2」と称することとする。
ここで、図7の例を参照しながら、実施例2における観察領域(観察試料108)の移動経路の選択手順を説明する。
まず、観察者は、例えば共焦点レーザ走査型顕微鏡本体1に備えられている接眼レンズ(不図示)を通して観察試料108の拡大像を観察する。ここで、電動XYステージ装置や電動準焦部を動作させて観察試料108上に複数の観察領域を設定してコンピュータ2へその位置を登録する。但し、この設定及び登録においては、観察領域毎に、観察(スライス像の取得)を行うZ軸方向の範囲を、例えばその範囲の境界を示すZ座標を特定する等して設定し登録する。登録された観察領域毎の位置や範囲の情報はメモリ2cに記憶される。
今、実施例1に係る手法で観察順が、図7(a)に示すように、No.1→No.2→No.3→No.4のように決定された4つの観察領域を例にして考える。このとき、各観察領域におけるZ軸方向のスライス像の取得範囲が、図7(b)に観察領域毎に「Top」及び「Bottom」と示されている境界位置で設定されているものとする。
図7の例では、まず、先頭観察領域であるNo.1の観察領域において、対物レンズ106の合焦点が「Top1」のZ軸方向位置から「Bottom1」のZ軸方向位置へと移動するように電動準焦部の動作を制御し、このとき所定の移動間隔で観察を行う。
図7の例で引き続き説明すると、No.2の観察領域における終了焦点位置は「Top2」であり、「Top2」は次の観察順であるNo.3の観察領域におけるスライス像の取得範囲の設定における境界「Bottom3」の方が境界「Top3」よりも近いので、No.3の観察領域では開始焦点位置「Bottom3」から終了焦点位置「Top3」へ対物レンズ106の合焦点を移動させながら観察を行う。同様に、No.3に続くNo.4の観察領域では、No.3の観察領域における終了焦点位置「Top3」に近い境界「Top4」から境界「Bottom4」へ対物レンズ106の合焦点を移動させながら観察を行う。
S202では、共焦点レーザ走査型顕微鏡本体1を制御して観察位置に現在位置している対象観察領域の画像の取得(対象観察領域処理)を行わせてメモリ2cに記憶させる処理が行われる。
S207では、この対象観察領域について設定されているスライス像の取得範囲を特定する2つの境界の各々と、メモリ2cから取得される直前の観察領域の終了焦点位置との間の距離を各々算出する処理が行われ、続くS208において電動準焦部を制御して、算出された距離が短い方の境界を対物レンズ106の合焦点に位置させる処理が行われ、その後はS202へと処理を戻して画像の取得処理が再度行われる。なお、このときに対物レンズ106の合焦点に位置させた方の境界が次の観察順である観察領域における開始焦点位置となり、他方の境界がその観察領域における終了焦点位置となる。
次に本発明の更なる別の実施例である実施例3について説明する。
例えば、図9(a)に示すように、観察領域の観察順が前述した観察順決定処理(図5)によって「領域A」→「領域B」と決定されていたときに、領域Aに含まれていた細胞が実験開始後に成長したために領域Aのみでは全体像を観察しきれなくなってしまった場合を考える。このときには、図9(b)に示すように、領域Aに隣接する領域Cを実験開始後に追加しなければ全体像が観察できない。
実施例3に係るシステム構成は、図1に示したものをそのまま使用することができる。
次に図10について説明する。同図は顕微鏡制御処理の第三の例の処理内容をフローチャートで表したときに、図6に示した第一の例と異なる部分を示したものである。この第三の例の処理は、図1に示したシステム全体を制御して多点タイムラプス観察のための実験を行わせる処理であり、上述した実験開始後の観察領域の追加を図1に示したシステムで可能とするために計算・処理部2aによって行われる処理である。なお、この処理も、前述した制御プログラム2dを計算・処理部2aで実行させると開始される。
図6のS117の判定結果がNoであったときに実行されるS301では、前述したタイマが予め設定されていた所定時間の経過を計時したか否かを判定する処理が行われ、所定時間の経過が計時されたならば(判定結果がYesとなったならば)図6のS119に処理を進める。一方、所定時間の経過を未だ計時していないならば(判定結果がNoならば)S302に処理を進める。
以上の顕微鏡制御処理の第三の例を計算・処理部2aが実行することによって、図1に示したシステムで、実験開始後の観察領域を追加することのできる、多点タイムラプス観察のための実験が可能となる。
なお、図5、図6、図8、及び図10の各々にフローチャートで示した処理をコンピュータ2の計算・処理部2aが有しているCPU(不図示)に行わせるための制御プログラム2dをコンピュータ読み取り可能な記録媒体に記録させておき、そのプログラムを記録媒体からコンピュータ2に読み込ませてCPUで実行させるようにしても、図1に示したシステムで前述した多点タイムラプス観察の実験を行うための制御をコンピュータ2に行わせることができる。
例えば、上述した各実施形態においては、多点タイムラプス観察のため対物レンズ106の合焦点の観察領域の画像の取得を行うようにしていた(図6のS114や図8のS202)が、この画像の取得の処理に代えて、若しくは画像の取得の処理に併せて、対物レンズ106を介して強いレーザ光を観察試料108の対象観察領域へ照射する処理を行うようにして、対物レンズ106の合焦点に順次位置する対象観察領域に含まれる細胞等へ次々と刺激を与えるといった対象観察領域への処理を行うようにしてもよい。
2 コンピュータ
2a 計算・処理部
2b A/D変換器
2c メモリ
2d 制御プログラム
3 操作パネル
4 レーザ装置
5 画像モニタ
101 光電変換器
102 励起用ダイクロイックミラー
103 ダイクロイックミラー
104 走査ユニット
105 レボルバ
106 対物レンズ
107 ステージ
108 観察試料
109 レンズ
110 コンフォーカルアパーチャ
111 バリアフィルタ
200 コンピュータ
201 記憶装置
202 媒体駆動装置
203 携帯可能記録媒体
204 ネットワーク回線
205 プログラムサーバ
206 記憶装置
Claims (10)
- 対物レンズの光軸に対して垂直な平面上で観察試料を移動させる平面移動手段と、
前記観察試料に対してなされる複数の観察領域の各々の前記平面上における位置の設定を取得する観察領域位置設定取得手段と、
前記対物レンズの合焦位置が位置している前記観察領域である対象観察領域の画像の取得の処理、若しくは当該対象観察領域への刺激の処理を行う対象観察領域処理手段と、
前記対象観察領域と他の前記観察領域との間の距離を算出する算出手段と、
前記平面移動手段を制御して前記観察試料を移動させて、前記観察領域のうち前記画像の取得の処理若しくは前記刺激の処理が未だ行われていないものであって且つ前記対象観察領域との間の前記距離が最短であるものを、前記対物レンズの合焦位置に位置させる平面移動制御手段と、
を有することを特徴とする顕微鏡装置。 - 前記観察領域から選ばれる最初に前記対象観察領域とするものである先頭観察領域の選択の設定を取得する選択取得手段と、
前記平面移動手段を制御して前記観察試料を移動させ、前記先頭観察領域を前記対物レンズの合焦位置へ位置させる初動制御手段と、
いずれかの前記観察領域が前記対物レンズの合焦位置に位置したときに前記画像の取得の処理若しくは前記刺激の処理を前記対象観察領域処理手段に行わせる対象観察領域処理制御手段と、
を更に有し、
前記平面移動制御手段は、前記対象観察領域処理手段による前記画像の取得の処理若しくは前記刺激の処理がひとつの前記対象観察領域に対して完了してから前記平面移動手段を制御する、
ことを特徴とする請求項1に記載の顕微鏡装置。 - 所定の時間の経過を計時する計時手段を更に有し、
前記初動制御手段は、前記所定の時間が経過する度に前記平面移動手段の制御を改めて開始し、
前記平面移動制御手段は、前記所定の時間が経過する度に全ての前記観察領域について前記画像の取得の処理若しくは前記刺激の処理が行われていないものとして前記平面移動手段の制御を行う、
ことを特徴とする請求項2に記載の顕微鏡装置。 - 前記対物レンズの焦点と前記観察試料との間の相対的な位置関係を当該対物レンズの光軸方向に変化させる光軸方向移動手段と、
前記観察領域の各々における前記光軸方向の位置の範囲の設定を取得する観察領域範囲取得手段と、
前記観察領域が前記対物レンズの合焦位置に位置したときに前記光軸方向移動手段を制御して前記位置関係を変化させて、前記観察試料に対する前記対物レンズの焦点の位置を、前記対象観察領域について設定されている前記範囲を特定している一方の境界から他方の境界まで一定の向きに変化させる光軸方向移動制御手段と、
を更に有し、
前記対象観察領域処理手段は、前記対象観察領域での前記観察試料に対する前記対物レンズの焦点の位置の変化量が所定の量に達する毎に、当該対象観察領域に対する前記画像の取得の処理若しくは前記刺激の処理を行う、
ことを特徴とする請求項1に記載の顕微鏡装置。 - 前記光軸方向移動制御手段による制御が終了したときにおける前記観察試料に対する前記対物レンズの焦点の位置である終了焦点位置を取得する終了時焦点位置取得手段を更に有し、
前記光軸方向移動制御手段は、前記対象観察領域について設定されている前記範囲を特定している2つの境界のうち、前記終了時焦点位置取得手段によって直近に取得されていた前記終了焦点位置と近い方の境界から遠い方の境界へと前記観察試料に対する前記対物レンズの焦点の位置を変化させる、
ことを特徴とする請求項4に記載の顕微鏡装置。 - 前記初動制御手段による制御が開始された後に前記観察試料に対してなされる新たな領域の前記平面上の位置の設定を取得して当該領域を前記観察領域とする観察領域位置設定追加取得手段を更に有することを特徴とする請求項3に記載の顕微鏡装置。
- 前記刺激の処理は、前記対物レンズを介して前記対象観察領域へレーザ光を照射する処理であることを特徴とする請求項1から6までのうちのいずれか一項に記載の顕微鏡装置。
- 対物レンズの光軸に対して垂直な平面上で観察試料を移動させる平面移動手段と、
前記観察試料に対してなされる複数の観察領域の各々の前記平面上における位置の設定を取得する観察領域位置設定取得手段と、
前記対物レンズの合焦位置が位置している前記観察領域である対象観察領域の画像の取得の処理、若しくは当該対象観察領域への刺激の処理を行う対象観察領域処理手段と、
前記対象観察領域と他の前記観察領域との間の距離を算出する算出手段と、
前記観察領域の全てを前記対物レンズの合焦位置に順次位置させるべく前記観察試料の移動をさせるときに、前記距離に基づく順序であって当該移動の経路長を短くする当該順序で当該観察試料を移動させるように前記平面移動手段を制御する平面移動制御手段と、
を有することを特徴とする顕微鏡装置。 - 顕微鏡装置での観察対象である観察試料に対して複数設定される観察領域のうち当該顕微鏡装置に備えられている対物レンズの合焦位置が位置している観察領域である対象観察領域とその他の当該観察領域との間の距離を算出し、
前記対物レンズの光軸に対して垂直な平面上で前記観察試料を移動させて、前記観察領域のうち当該観察領域の画像の取得の処理若しくは当該観察領域への刺激の処理が前記顕微鏡装置によって未だ行われていないものであって且つ前記対象観察領域との間の前記距離が最短であるものを、当該対物レンズの合焦位置に位置させる、
ことを特徴とする顕微鏡装置の制御方法。 - 顕微鏡装置での観察対象である観察試料に対して複数設定される観察領域のうち当該顕微鏡装置に備えられている対物レンズの合焦位置が位置している観察領域である対象観察領域とその他の当該観察領域との間の距離を算出する処理と、
前記対物レンズの光軸に対して垂直な平面上で前記観察試料を移動させて、前記観察領域のうち当該観察領域の画像の取得の処理若しくは当該観察領域への刺激の処理が前記顕微鏡装置によって未だ行われていないものであって且つ前記対象観察領域との間の前記距離が最短であるものを、当該対物レンズの合焦位置に位置させる処理と、
をコンピュータに行わせるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004007521A JP4664599B2 (ja) | 2004-01-15 | 2004-01-15 | 顕微鏡装置 |
| US11/024,380 US7238934B2 (en) | 2004-01-15 | 2004-12-28 | Microscope apparatus and method for controlling microscope apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004007521A JP4664599B2 (ja) | 2004-01-15 | 2004-01-15 | 顕微鏡装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005202087A true JP2005202087A (ja) | 2005-07-28 |
| JP2005202087A5 JP2005202087A5 (ja) | 2007-03-01 |
| JP4664599B2 JP4664599B2 (ja) | 2011-04-06 |
Family
ID=34747149
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004007521A Expired - Fee Related JP4664599B2 (ja) | 2004-01-15 | 2004-01-15 | 顕微鏡装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7238934B2 (ja) |
| JP (1) | JP4664599B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008058249A (ja) * | 2006-09-01 | 2008-03-13 | Olympus Corp | 観察測光装置および観察測光方法 |
| JP2008185922A (ja) * | 2007-01-31 | 2008-08-14 | Nikon Corp | 顕微鏡 |
| US7982170B2 (en) | 2008-09-29 | 2011-07-19 | Olympus Corporation | Microscope system |
| JP2012002949A (ja) * | 2010-06-15 | 2012-01-05 | Nikon Corp | 観察装置 |
| EP2503373A1 (en) | 2011-03-23 | 2012-09-26 | Olympus Corporation | Microscope performing 3D imaging |
| JP2013050667A (ja) * | 2011-08-31 | 2013-03-14 | Nikon Corp | 顕微鏡制御装置、画像処理装置、顕微鏡装置およびプログラム |
| JP2019074669A (ja) * | 2017-10-17 | 2019-05-16 | 株式会社キーエンス | 拡大観察装置 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5132052B2 (ja) * | 2005-11-30 | 2013-01-30 | オリンパス株式会社 | 走査型レーザ顕微鏡の条件設定装置及び走査型レーザ顕微鏡システム |
| JP4893275B2 (ja) * | 2006-11-30 | 2012-03-07 | 株式会社ニコン | 顕微鏡装置 |
| EP2157466A4 (en) * | 2007-06-15 | 2012-05-09 | Nikon Corp | CONFOCAL MICROSCOPE DEVICE |
| JP2011095685A (ja) * | 2009-11-02 | 2011-05-12 | Sony Corp | 顕微鏡システム及び顕微鏡システムの制御方法 |
| JP5784790B2 (ja) * | 2014-04-28 | 2015-09-24 | オリンパス株式会社 | 蛍光観察装置 |
| CN104914564A (zh) * | 2015-06-24 | 2015-09-16 | 中山安荞生物科技有限公司 | 一种显微镜 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6111714A (ja) * | 1984-06-26 | 1986-01-20 | Matsushita Electric Ind Co Ltd | 顕微鏡の自動焦点調整装置 |
| JP2000056235A (ja) * | 1998-08-12 | 2000-02-25 | Olympus Optical Co Ltd | 検査顕微鏡システム |
| JP2000295462A (ja) * | 1999-02-04 | 2000-10-20 | Olympus Optical Co Ltd | 顕微鏡画像伝送システム |
| JP2002277754A (ja) * | 2001-03-22 | 2002-09-25 | Olympus Optical Co Ltd | 顕微鏡写真撮影装置 |
| JP2003015056A (ja) * | 2001-06-29 | 2003-01-15 | Matsushita Electric Ind Co Ltd | 画像撮像方法および装置 |
| JP2003307681A (ja) * | 2002-04-17 | 2003-10-31 | Olympus Optical Co Ltd | 共焦点走査型光学顕微鏡 |
| JP2004004678A (ja) * | 2002-03-27 | 2004-01-08 | Olympus Corp | 共焦点顕微鏡装置及び共焦点顕微鏡装置を用いた観察方法 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0627383A (ja) | 1992-07-08 | 1994-02-04 | Olympus Optical Co Ltd | 画像表示方法および画像表示装置 |
| SE517626C3 (sv) * | 2001-04-12 | 2002-09-04 | Cellavision Ab | Förfarande vid mikroskopering för att söka av och positionera ett objekt, där bilder tas och sammanfogas i samma bildkoordinatsystem för att noggrant kunna ställa in mikroskopbordet |
-
2004
- 2004-01-15 JP JP2004007521A patent/JP4664599B2/ja not_active Expired - Fee Related
- 2004-12-28 US US11/024,380 patent/US7238934B2/en not_active Expired - Lifetime
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6111714A (ja) * | 1984-06-26 | 1986-01-20 | Matsushita Electric Ind Co Ltd | 顕微鏡の自動焦点調整装置 |
| JP2000056235A (ja) * | 1998-08-12 | 2000-02-25 | Olympus Optical Co Ltd | 検査顕微鏡システム |
| JP2000295462A (ja) * | 1999-02-04 | 2000-10-20 | Olympus Optical Co Ltd | 顕微鏡画像伝送システム |
| JP2002277754A (ja) * | 2001-03-22 | 2002-09-25 | Olympus Optical Co Ltd | 顕微鏡写真撮影装置 |
| JP2003015056A (ja) * | 2001-06-29 | 2003-01-15 | Matsushita Electric Ind Co Ltd | 画像撮像方法および装置 |
| JP2004004678A (ja) * | 2002-03-27 | 2004-01-08 | Olympus Corp | 共焦点顕微鏡装置及び共焦点顕微鏡装置を用いた観察方法 |
| JP2003307681A (ja) * | 2002-04-17 | 2003-10-31 | Olympus Optical Co Ltd | 共焦点走査型光学顕微鏡 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008058249A (ja) * | 2006-09-01 | 2008-03-13 | Olympus Corp | 観察測光装置および観察測光方法 |
| JP2008185922A (ja) * | 2007-01-31 | 2008-08-14 | Nikon Corp | 顕微鏡 |
| US7982170B2 (en) | 2008-09-29 | 2011-07-19 | Olympus Corporation | Microscope system |
| JP2012002949A (ja) * | 2010-06-15 | 2012-01-05 | Nikon Corp | 観察装置 |
| EP2503373A1 (en) | 2011-03-23 | 2012-09-26 | Olympus Corporation | Microscope performing 3D imaging |
| JP2012203048A (ja) * | 2011-03-23 | 2012-10-22 | Olympus Corp | 顕微鏡 |
| US8958146B2 (en) | 2011-03-23 | 2015-02-17 | Olympus Corporation | 3D imaging microscope |
| JP2013050667A (ja) * | 2011-08-31 | 2013-03-14 | Nikon Corp | 顕微鏡制御装置、画像処理装置、顕微鏡装置およびプログラム |
| JP2019074669A (ja) * | 2017-10-17 | 2019-05-16 | 株式会社キーエンス | 拡大観察装置 |
| JP7023667B2 (ja) | 2017-10-17 | 2022-02-22 | 株式会社キーエンス | 拡大観察装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050156106A1 (en) | 2005-07-21 |
| JP4664599B2 (ja) | 2011-04-06 |
| US7238934B2 (en) | 2007-07-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4664599B2 (ja) | 顕微鏡装置 | |
| US7355702B2 (en) | Confocal observation system | |
| JP4414722B2 (ja) | レーザー顕微鏡 | |
| JP7064796B2 (ja) | 画像再構成方法、装置及び顕微結像装置 | |
| JP2007263730A (ja) | 多光子励起型観察装置 | |
| JP4700299B2 (ja) | 共焦点走査型顕微鏡 | |
| JP2012517035A (ja) | レーザ走査顕微鏡法における信号取得の方法及びデバイス | |
| JP2012155010A (ja) | 顕微鏡システム、表面状態観察方法および表面状態観察プログラム | |
| CN109276229A (zh) | 一种用于光声显微成像的快速对焦系统及方法 | |
| WO2016092674A1 (ja) | 観察システム、光学部品、及び観察方法 | |
| JP5963487B2 (ja) | レーザ顕微鏡および観察方法 | |
| JP6832093B2 (ja) | 顕微鏡システム | |
| JP5299078B2 (ja) | レーザ走査顕微鏡、3次元画像取得方法、及びプログラム | |
| JP7015144B2 (ja) | 画像処理装置および顕微鏡システム | |
| JP7030986B2 (ja) | 画像生成装置、画像生成方法および画像生成プログラム | |
| JP4803974B2 (ja) | 共焦点観察システム、光照射方法、及び光照射プログラム | |
| JP2006293219A (ja) | 走査型共焦点顕微鏡および試料情報測定方法 | |
| JP2005115072A (ja) | 走査型レーザ顕微鏡、及びその制御方法、並びにプログラム | |
| US10168523B2 (en) | Image generating system, image generating method, and image generating apparatus | |
| JP2006308338A (ja) | 超音波画像検査方法、超音波画像検査装置、超音波擬似染色方法 | |
| JP2005345764A (ja) | 走査型光学装置 | |
| JPH1138324A (ja) | レーザ走査顕微鏡 | |
| JP2005337920A (ja) | 光信号解析方法 | |
| JP2007183425A (ja) | 観察装置 | |
| JP3727704B2 (ja) | 多方向画像入力装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070110 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070110 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100302 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100427 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100824 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101119 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20101129 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101221 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110107 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4664599 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140114 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |