JP2005229290A - 撮像装置及び撮像方法 - Google Patents
撮像装置及び撮像方法 Download PDFInfo
- Publication number
- JP2005229290A JP2005229290A JP2004035285A JP2004035285A JP2005229290A JP 2005229290 A JP2005229290 A JP 2005229290A JP 2004035285 A JP2004035285 A JP 2004035285A JP 2004035285 A JP2004035285 A JP 2004035285A JP 2005229290 A JP2005229290 A JP 2005229290A
- Authority
- JP
- Japan
- Prior art keywords
- imaging
- image
- unit
- imaging position
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Landscapes
- Stereoscopic And Panoramic Photography (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
- Studio Devices (AREA)
Abstract
【課題】立体画像やパノラマ画像を手軽に撮影することができる撮像装置及び撮像方法を提供する。
【解決手段】第1の撮像位置202(状態1)において撮影指令があると被写体200の撮像が行われ、得られた画像が記録される。第1の撮像位置202から第2の撮像位置204(状態2)へ撮像部16が自動的に移動され、被写体200の撮像が自動的に行われ、得られた画像データが記録される。記録された2つの有視差画像がカメラ10内で合成されて立体画像データが生成される。第1の撮像位置202から第2の撮像位置へ撮像部16を移動させるには、第2の回動軸28を回動させて本体部20に対して撮像部16を略180°回動させると共に第1の回動軸26を略180°回動させて撮像レンズ12を反転させればよい。
【選択図】 図5
【解決手段】第1の撮像位置202(状態1)において撮影指令があると被写体200の撮像が行われ、得られた画像が記録される。第1の撮像位置202から第2の撮像位置204(状態2)へ撮像部16が自動的に移動され、被写体200の撮像が自動的に行われ、得られた画像データが記録される。記録された2つの有視差画像がカメラ10内で合成されて立体画像データが生成される。第1の撮像位置202から第2の撮像位置へ撮像部16を移動させるには、第2の回動軸28を回動させて本体部20に対して撮像部16を略180°回動させると共に第1の回動軸26を略180°回動させて撮像レンズ12を反転させればよい。
【選択図】 図5
Description
本発明は撮像装置及び撮像方法に係り、特に立体画像やパノラマ画像を取得可能な電子カメラにおける撮像技術に関する。
デジタルカメラやデジタルビデオカメラなどの電子カメラには立体画像(映像)やパノラマ画像を撮影できるものがあり、立体感のある3次元画像(いわゆる3D画像)や、広範囲にわたる風景画像 (パノラマ画像)などを撮影して楽しむことができる。
立体画像の撮影では2つの撮像装置を一定間隔離して並べ、2つの撮像装置から得られる画像(映像)を合成することにより、3D立体画像を得ることができる。また、パノラマ画像を得るためにはカメラを回動させる支持台の上にカメラを固定し、カメラを回動させながら順次画像を取得し、このように取得された画像をつなぎ合わせることでパノラマ画像を得ている。
特許文献1に開示された立体映像撮影装置及び該装置を用いる立体映像撮影記録再生装置では、2台のビデオカメラをその光軸が概略平行に眼幅離して配設され、3次元の立体映像を撮影するときには2台のビデオカメラによって撮影された左眼と右眼が見た映像に相当する映像を2つの映像信号として同時に記録する。
また、特許文献2に開示されたパノラマ撮影用電子カメラシステムでは、電子カメラと該電子カメラを支持する支持装置とから成る電子カメラは、撮影動作に応じて電子カメラを特定方向に回動させつつ、撮像手段の素子列の少なくとも一部の素子を用いて複数の所定角度範囲内の撮影を順次行う。
特許文献3に開示された電子パノラマ画像表示装置では、撮影レンズ及び1ラインのリニアイメージセンサを含むカメラヘッド部を回転雲台によりエンドレス又は所要の視野角度回転させて得た画像信号を撮影視野に合わせて画像表示装置に展開画像として表示する。
特開平9−215012号公報
特開平7−30802号公報
特開平5−83711号公報
しかしながら、立体画像を得るためには2つの撮像装置が必要となるためにコストがかかり、2つの撮像装置から得られる画像を処理する画像処理系の処理が複雑になるといった欠点がある。また、パノラマ画像を得るためにパノラマ撮影用のカメラの他に該カメラを回動させる支持台が必要となり、コスト的にも手軽さの点においても不利となる。
特許文献1に開示された立体映像撮影装置及び該装置を用いる立体映像撮影記録再生装置では、2つのビデオカメラを備えなければならず、コスト面で不利なだけでなく装置の小型化の妨げにもなる。
また、特許文献2に開示されたパノラマ撮影用電子カメラシステム及び特許文献3に開示された電子パノラマ画像表示装置では、カメラを回動させる支持装置が必要であり、カメラの回動速度と撮像タイミングとの制御が複雑になる。
本発明はこのような事情に鑑みてなされたもので、立体画像やパノラマ画像を手軽に撮影することができる撮像装置及び撮像方法を提供することを目的とする。
前記目的を達成するために請求項1に係る発明は、被写体を撮像し、得られた被写体像を画像信号に変換する撮像手段と、前記撮像手段を第1の撮像位置から第2の撮像位置へ移動させる移動手段と、前記移動手段によって前記撮像手段を前記第1の撮像位置から前記第2の撮像位置へ自動的に移動させるように前記移動手段の制御を行う移動制御手段と、撮像指令に応じて前記第1の撮像位置で撮像を行い、前記第2の撮像位置への移動後に当該第2の撮像位置において第1の撮像位置における撮像と同一被写体の撮像を自動的に行うように前記撮像手段を制御する撮像制御手段と、前記第1の撮像位置での撮像で得られた画像と前記第2の撮像位置での撮像で得られた画像とを合成して立体画像を生成する画像処理手段と、を備えたことを特徴としている。
即ち、1つの撮像手段を第1の撮像位置から第2の撮像位置へ自動的に移動させて、それぞれの撮像位置で同一の被写体を撮像して得られた有視差画像を合成して立体画像を生成するので、立体画像を得るために撮像装置を2つ備えなくてもよい。また、第1の撮像位置における撮像、第1の撮像位置から第2の撮像位置への撮像手段の移動、第2の撮像位置における撮像が1回の撮像指令によって自動的に行われるので大変便利である。
立体画像の撮像方法には、視差のずれが生じた2点において同一被写体を撮像して得られた2つの画像を合成して生成する方法がある。
撮像手段には単数又は複数のレンズから構成される撮影レンズ、撮影レンズを通して得られた被写体の光学像を電気信号(画像信号)に変換する撮像素子、撮像素子への露光量を調整する絞り、シャッター等の光学部材などが含まれていてもよい。
撮像素子にはCCD(電荷結合素子)やMOS型の固体撮像素子などを適用することができる。
画像処理手段にて生成された立体画像を記録する記録手段を備える態様が好ましい。該記録手段には、該撮像装置内のメモリーを用いてもよいし、PCカード等の該撮像装置と着脱可能な記録メディアを用いてもよい。
1回の立体画像撮影が終了すると、撮像手段は第2の撮像位置から第1の撮像位置へ自動的に移動される態様が好ましい。
第1の撮像位置及び第2の撮像位置の何れでも他の撮像モードを実行できるように構成することが好ましい。
第1の撮像位置と第2の撮像位置との間を移動させる移動手段には、撮像手段を回動、直線移動又はこれらを組み合わせた移動をさせる移動機構、該移動機構の駆動源となるモータ及びアクチュエータ、該モータ(アクチュエータ)を制御するドライバ等の制御系が含まれていてもよい。
生成された立体画像を表示する表示手段を設けてもよい。
また、前記目的を達成するために請求項2記載の発明において、被写体像を画像信号に変換する撮像手段を用いて、撮像指令に応じて第1の撮像位置で第1の撮像を実行し、前記第1の撮像後に前記撮像手段を前記第1の撮像位置から第2の撮像位置へ自動的に移動して、前記第2の撮像位置にて第2の撮像を自動的に実行し、前記第1の撮像により得られた第1の画像と前記第2の撮像により得られた第2の画像とを合成して立体画像を生成することを特徴としている。
即ち、撮像手段を用いて第1の撮像位置で被写体の撮像が行われると、該撮像手段は第1の撮像位置から第2の撮像位置へ自動的に移動し、第2の撮像位置で第1の撮像位置での撮像と同一の被写体の撮像が行われ、このように得られた2つの画像を合成して立体画像(3次元画像、3D画像)が生成されるので、撮像手段を2つ備えることなく手軽に立体画像を得ることができる。
また、前記目的を達成するために請求項3記載の発明において、撮影レンズと、前記撮影レンズにより得られた被写体像を画像信号に変換する撮像素子と、を有する撮像手段を備えた撮像装置であって、第1の回動軸を回動させて前記撮影レンズの向きを変える第1の移動手段と、第2の回動軸を回動させて前記撮像手段を第1の撮像位置から前記第1の撮像位置と視差が異なる画像を得ることができる第2の撮像位置へ回動移動させる第2の移動手段と、前記第1の撮像位置及び前記第2の撮像位置において前記撮像手段によって同一被写体を撮像し、有視差画像を得ることを特徴としている。
即ち、第1の回動軸を回動させて撮影レンズの向きを変える第1の移動手段と、第2の回動軸を回動させて撮像手段を視差の異なる撮像位置(第2の撮像位置)へ移動させる第2の移動手段とを用いることで、有視差画像を撮影するために好ましい撮像位置を得ることができる。
例えば、第1の撮像位置から第2の撮像位置へ撮像手段を移動させる態様には、第1の回動軸を回動させて撮影レンズを反転させ(略180°回動させ)、第2の回動軸を回動させて撮像手段を水平面内で略180°回動させる態様がある。
第1の移動手段及び第2の移動手段は360°(一周)回動することができてもよいし、所定の角度だけ回動できるように構成してもよい。
また、第1の移動手段及び第2の移動手段の回動方向は一方向でもよいし、正逆転両方向に回動するように構成してもよい。
通常撮影は第1の撮像位置における状態及び第2の撮像位置における状態の何れの状態でも行えることが好ましい。
また、請求項4に示すように請求項3記載の発明において、前記第1の回動軸によって前記撮像手段と連結され、前記第1の回動軸を回動させる際に前記撮像手段を支持する連結部と、前記第2の回動軸によって前記連結部と連結され、前記第2の回動軸を回動させる際に前記連結部を支持する本体部と、を備えたことを特徴としている。
即ち、撮像手段と本体部とは連結手段を介して連結される一体型構造を有している。本体部に対して撮像手段を略180°回動させると共に撮影レンズを反転(略180°回動)させることで、撮影レンズ(撮像手段)は第1の撮像位置から第2の撮像位置へ移動することができる。
撮像手段を回動させる際に本体部を三脚や固定台に固定する固定手段(三脚ねじ穴等)を本体部に備える態様が好ましい。
また、撮像手段と本体部とはそれぞれの上面部で連結部を介して連結される態様が好ましい。
また、請求項5に示すように請求項3又は4記載の発明において、前記第2の移動手段によって前記撮像手段を前記第1の撮像位置から前記第2の撮像位置へ自動的に回動移動させると共に、前記第1の移動手段により前記第1の回動軸を回動させて撮影レンズの向きを自動的に変えるように制御する回動制御手段を備えたことを特徴としている。
即ち、回動制御手段の制御によって第1の撮像位置から第2の撮像位置へ撮像手段を自動的に移動させることができる。
また、請求項6に示すように請求項3、4又は5記載の発明において、前記第1の撮像位置での撮像指令に応じて前記第1の撮像位置で撮像を行い、前記撮像手段が前記第1の撮像位置から前記第2の撮像位置へ移動されると、前記第2の撮像位置にて前記第1の撮像位置と同一被写体を自動的に撮像するように制御する撮像制御手段を備えたことを特徴としている。
即ち、撮像制御手段の制御によって、第1の撮像位置において撮像指令を与えると、第1の撮像位置及び第2の撮像位置において自動的に撮像を行い有視差画像を得ることができる。
更に、請求項5に記載された発明と請求項6に記載された発明とを組み合わせることで、1回の撮像指令によって、第1の撮像位置で撮像を行い、撮像手段を第1の撮像位置から第2の撮像位置へ移動させ、第2の撮像位置で撮像を行って有視差画像を得ることが自動で行うことが可能になる。
また、請求項7に示すように請求項3乃至6のうち何れか1項に記載の発明において、前記第1の撮像位置及び前記第2の撮像位置において撮像されて得られた有視差画像を合成して立体画像を生成する画像処理手段を備えたことを特徴としている。
即ち、第1の撮像位置及び第2の撮像位置において撮像された有視差画像を合成する画像処理手段を備えたので、有視差画像から生成される立体画像を得ることができる。
該画像処理手段は撮像信号に所定の信号処理を施す信号処理手段と兼用されていてもよい。また、画像処理を行う際の作業領域や画像を一時記憶させる記憶手段(メモリ)を備える態様が好ましい。
また、請求項8に示すように請求項7記載の発明において、前記画像処理手段で生成された立体画像を記録する記録手段を備えたことを特徴としている。
合成画像に代えて前記第1の撮像位置及び前記第2の撮像位置において撮像されて得られた有視差画像を記録してもよい。また、合成画像及び有視差画像を共に記録してもよい。更に、該記録手段とは別に有視差画像を記録する第2の記録手段を備えてもよい。
記録手段は該撮像装置に内蔵されているメモリを用いてもよいし、該撮像装置と着脱可能なリムーバブルメモリを用いてもよい。また、半導体記録媒体、磁気記録媒体、光学的記録媒体及びこれらを組み合わせた複合型記録媒体等を適用可能である。
また、請求項9に示すように請求項3記載の発明において、前記回動制御手段は、前記第1の移動手段或いは前記第2の移動手段のうち少なくとも何れか一方を用いて前記撮像手段を前記本体部に対して所定の角度ずつ回動させる制御を行い、前記撮像制御手段は、前記撮像手段の移動位置ごとに前記撮像手段を用いて撮像を行うように制御し、該移動位置において撮像されて得られた複数の画像データを合成してパノラマ画像を生成するパノラマ画像生成手段を備えたことを特徴としている。
即ち、撮像手段を所定の角度ずつ回動させ、各移動位置において撮像を行い、得られた画像を合成してパノラマ画像を得ることができる。
なお、第1の移動手段を用いて撮像手段を回動させてもよいし、第2の移動手段を用いて撮像手段を回動させてもよい。更に、第1の移動手段及び第2の移動手段の両方を用いて撮像手段を移動させてもよい。
また、請求項10に示すように請求項3記載の発明において、前記移動制御手段は、前記第2の移動手段を用いて前記撮像手段を前記本体部に対して所定の角度ずつ略360°回動させる制御を行い、前記撮像制御手段は、前記撮像手段の移動位置ごとに前記撮像手段を用いて撮像を行うように制御し、前記パノラマ画像生成手段は該移動位置において撮影され生成された複数の画像データを合成して全方向のパノラマ画像を生成することを特徴としている。
即ち、撮像部を所定の角度ずつ略360°回動させ、撮像部の移動位置ごとに撮像を行い、得られた画像を合成すると、全方向のパノラマ画像を得ることができる。
本発明によれば、1つの可動な撮像手段で被写体を2回撮影し、それら2つの画像(映像)を合成することにより、3次元立体画像を得ることができる。即ち、第1の撮像位置で撮像指令があると、先ず第1の撮像位置において撮像が行われ、撮像手段を第1の撮像位置から第2の撮像位置へ自動的に移動され、第2の撮像位置において第1の撮像位置の撮像と同一被写体の撮像が行われ、得られた有視差画像を合成して立体画像が生成される。したがって、1つの撮像手段を用いて立体画像を得ることができる。
また、撮影レンズを回動(反転)させる第1の移動手段(第1の回動軸)と、第1の撮像位置から第2の撮像位置へ撮像手段を移動させる第2の移動手段(第2の回動軸)を備えたので、有視差画像を得るための撮像手段の撮像位置を得ることが可能になる。
また、第1の移動手段と第2の移動手段を制御する移動制御手段を備えたので、第1の撮像位置から第2の撮像位置への撮像手段の移動を自動化でき、更に、第1の撮像位置にて撮像指令を与えると、第1の撮像位置及び第2の撮像位置における撮像を自動的に行うことができる。
第1の撮像位置及び第2の撮像位置における撮像によって得られた有視差画像を合成する画像処理手段を備えたので、該有視差画像を合成して立体画像を生成することができる。また、該有視差画像を記録するための記録手段を備えている。
該撮像装置を用いてパノラマ画像を得ることができる。第1の回動手段或いは第2の回動手段のうち何れか一方を用いて撮像手段を所定の角度ずつ回動させ、各移動位置において撮像して得られた画像を合成するとパノラマ画像を得ることができる。また、第2の移動手段を用いて撮像手段を360°回動させると、全方向のパノラマ画像を得ることができる。
以下添付図面に従って本発明に係る撮像装置及び撮像方法の好ましい実施の形態について説明する。
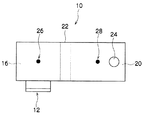
図1は、本発明の実施形態に係るデジタルカメラ10の外観を示す斜視図であり、図2はカメラ10の上面図である。
図1及び図2に示すように、カメラ10は撮影レンズ12、ストロボ14等を含んだ撮像部16と、撮影者が手でカメラ10を支持する際に使用するグリップ部18を正面に備えた本体部20と、を有し、撮像部16と本体部20とは、それぞれの上面で連結部22を介して連結されている。
連結部22の上面(即ち、カメラ10の上面)には記録ボタン(レリーズボタン)24が設けられている。
撮像部16は、撮像部16内にある(撮像部16を通る)第1の回動軸26を介して連結部22に支持されており、第1の回動軸26を回動させると撮像部自体が水平面内で回動(自転)できるように構成されている。
一方、本体部20は第2の回動軸28を介して連結部22に連結されており、連結部22は第2の回動軸28を回動させることにより本体部20に対して水平面内で回動することができる。したがって、撮像部16は本体部20に対して回動(公転)可能に構成されている。
撮像部16が第1の回動軸を軸として回動する際に撮像部16と本体部20とが干渉しないように、撮像部16と本体部20との間には所定のクリアランスが設けられている。一方、撮像部16を円柱形状とし、本体部20を撮像部16と嵌合できるように撮像部側の面を凹面形状にしてもよい。
本体部20の底面には不図示の三脚ねじ穴が設けられており、該三脚ねじ穴を用いて三脚や固定台に本体部20を固定させることができる。
図3は、カメラ10を背面側から見た斜視図である。
本体部20の背面には、画像表示装置30、スイッチやボタン、キー(レバー)などの操作部材から構成される操作部32が設けられている。
画像表示装置30は、動画(スルー画像)を表示して電子ビューファインダとして使用できるとともに、撮影した記録前の画像(プレビュー画像)やカメラ10に装填されたメモリーカードから読み出した再生画像等を表示することができる。更に、画像表示装置30は、撮影可能コマ数や再生コマ番号の表示、マニュアル設定する際のホワイトバランス、画素数、圧縮率、及びシャープネス等をマニュアル設定する際の各種のメニュー等が操作部32の操作に応じて表示される。なお、画像表示装置30には液晶モニタ(LCDモニタ)、有機LEモニタ、小型CRTモニタなどの表示装置を適用可能である。
操作部32は、図3には図示しない、電源スイッチ(図4の符号64)、モード選択スイッチ(図4の符号66)、モード選択スイッチ(図4の符号68)、ズームキー(図4の符号70)、メニューボタン(図4の符号72)、及びメニュー選択ボタン(図4の符号74)を含んだ構成である。
なお、カメラ10には図1乃至図3には図示しない音声記録を行う際に外部の音声を集音するマイクロホン(図4の符号84)、音声再生時に用いるスピーカー(図4の符号102)、USBなどの外部入出力インターフェイス等が設けられている。
図4はカメラ10の内部構成を示したブロック図である。
図1乃至3に示した撮像部16(破線で図示)に備えられた撮影レンズ12を通過した光は、不図示の絞りによって光量が調節された後、撮像部16内のCCD34に入射する。CCD34の受光面には、フォトセンサが平面的に配列されており、撮影レンズ12を介してCCD34の受光面に結像された被写体像は、各フォトセンサによって入射光量に応じた量の信号電荷に変換される。なお、CCD34は、シャッターゲートパルスのタイミングによって各フォトセンサの電荷蓄積時間(シャッタースピード)を制御する、いわゆる電子シャッター機能を有している。
撮影レンズ12は1枚又は複数枚のレンズで構成され、単焦点レンズでもよいし、ズームレンズ等の焦点距離可変のものでもよい。
各フォトセンサに蓄積された信号電荷は、不図示のCCDドライバから与えられるパルスに基づいて信号電荷に応じた電圧信号(画像信号)として順次読み出される。CCD34から出力された画像信号は図1乃至3に示した本体部20のアナログ処理部38に送られる。
アナログ処理部38は、サンプリングホールド回路、色分離回路、ゲイン調整回路等の信号処理回路を含み、このアナログ処理部38において、相関二重サンプリング(CDS)処理並びにR,G,Bの各色信号に色分離処理され、各色信号の信号レベルの調整(プリホワイトバランス処理)が行われる。
アナログ処理部38から出力された信号は、A/D変換器42によりデジタル信号に変換された後、画像入力コントローラ44を介して一旦メモリー46に格納される。メモリー46にはSDRAMが適用される。もちろんDRAM等の他の記憶素子を用いてもよい。
アナログ処理部38とA/D変換器42とを1つのIC(プロセッサー)内に搭載したアナログフロントエンド(AFE)を用いてもよい。
タイミングジェネレータ(TG)48は、CPU50の指令に従ってCCDドライバ、アナログ処理部38およびA/D変換器42に対してタイミング信号を与えており、このタイミング信号によって各回路の同期がとられている。
また、カメラ10は各ブロックに対して所定のクロックを供給するクロックジェネレータ54を備えている。クロックジェネレータ54には基準クロックを発生させる水晶振動子等のクロック源、該基準クロックから所望の周波数を持つクロックを生成する分周回路等が含まれている。
画像信号処理部56は輝度・色差信号生成回路、ガンマ補正回路、シャープネス補正回路、コントラスト補正回路、ホワイトバランス補正回路等を含むデジタルシグナルプロセッサ(DSP)で構成された画像処理手段であり、CPU50からのコマンドに従って画像信号に所定の処理を施す。メモリー46に一時記憶された画像データは画像信号処理部56により輝度信号(Y信号)および色差信号(Cr,Cb 信号)に変換されるとともに、ガンマ補正等の所定の処理が施された後、メモリー(VRAM)58に格納される。
撮影画像を表示出力する場合、メモリー58から画像データが読み出され、バス60を介してビデオエンコーダ回路(VIDEO エンコーダ)62に転送される。ビデオエンコーダ回路62に送られたデータは、表示用の所定方式の信号(例えば、NTSC方式のカラー複合映像信号)に変換された後、液晶モニタ(LCD)や有機EL等の画像表示装置30に出力される。こうして、当該画像データの画像内容が画像表示装置30の画面上に表示される。
CCD34から出力される画像信号によってメモリー58内の画像データが定期的に書き換えられ、その画像データから生成される映像信号が画像表示装置30に供給されることにより、CCD34を介して入力する画像がリアルタイムに画像表示装置30に表示される。撮影者は、画像表示装置30に映し出される画像(スルー画)、或いはファインダー(不図示)によって撮影画角を確認できる。
また文字情報を画像に重ねて画像表示装置30に表示するオーバーレイ表示を行う場合、不図示のキャラクタジェネレータ(CGEM)により文字情報のデータが生成され、ビデオエンコーダ回路62で画像データと合成されて、画像に文字情報がオーバーレイ表示される。
なお、図1にはメモリー(SDRAM)46とメモリー(VRAM)58とを別のデバイスとして示したが、これらのメモリーを含んだ記憶手段は1つのデバイスを領域分割して構成してもよい。また、図4に図示しない他のメモリーを含めて1チップとすることも可能である。
操作部32は、ボタン、レバー、スイッチ等の操作部材から構成され、撮影者が操作部32に含まれる操作手段を操作してカメラ10に所望の指示を与えることができる。操作部32から送出される操作信号(操作指令)はCPU50に受入されると、CPU50によって該当部分の制御が行われる。
操作部32には、記録ボタン24、電源スイッチ64、モード選択スイッチ(記録/再生)66、モード選択スイッチ(立体画像撮影/通常撮影)68、ズームキー70、メニューボタン72、及びメニュー選択ボタン74等が含まれている。
なお、上述した操作部32の構成はあくまでも一例であり、他の操作部材を備えてもよいし、上述した操作部材のうち複数の操作部材を兼用してもよい。また、上述した操作部材の機能をソフトウエアに割り付け、メニュー画面から選択して設定できるように構成してもよい。
操作部32に含まれる電源スイッチ64はカメラ10の主電源スイッチであり、電源スイッチ64を操作するとカメラ10の主電源がオンになる。
モード選択スイッチ66、68はカメラ10のモードを選択するスイッチであり、モード選択スイッチ66を操作すると記録モード(撮影モード)と再生モードとを切り換えることができ、モード選択スイッチ68を操作すると立体画像撮影モードと普通撮影モードとを切り換えることができる。
モード選択スイッチ66、68は多接点スイッチを適用してこれらを兼用してもよいし、スイッチ部材にはスライドスイッチを用いてもよいし回動式スイッチ(ダイヤル)を用いてもよい。
モード選択スイッチ66により記録モードが選択され記録ボタン24が押されると記録指示(レリーズON)信号が発せられる。
CPU50は、この指示信号の受入に呼応して、記録用の静止画像データの取り込みを開始する。また、CPU50は圧縮伸長回路76にコマンドを送り、これにより圧縮伸長回路76は、VRAM58上の画像データをJPEGその他の所定の形式に従って圧縮する。圧縮された画像データは、メディア記録制御部78を介して記録メディア80に記録される。
本例のカメラ10では、画像データを保存する手段として、例えばxD-Picture Card (登録商標)が適用される。記録メディアの形態はこれに限定されず、PCカード、コンパクトフラッシュ(登録商標)、磁気ディスク、光ディスク、光磁気ディスク、メモリースティック(登録商標)などでもよく、電子的、磁気的、若しくは光学的、又はこれらの組み合わせによる方式に従って読み書き可能な種々の媒体を用いることができる。
また、使用される媒体に応じた信号処理手段とインターフェイスが適用される。異種、同種の記録メディアを問わず、複数の媒体を装着可能な構成にしてもよい。また、画像ファイルを保存する手段は、カメラ本体に着脱可能なリムーバブルメディアに限らず、カメラ10に内蔵された記録媒体(内部メモリー)であってもよい。
モード選択スイッチ66により動画記録モードが選択されると音声付動画撮影を行うことができる。記録ボタン24が押下されると記録用の画像データ取り込みが開始されると共にマイクロホン84から音声が取り込まれ、音声増幅部86にて増幅された音声信号は音入力処理部88にて変調及びデジタル化され画像ファイルと共に記録メディア80に記録される。
なお、音声データは画像データの圧縮形式によっては圧縮伸長回路76にて圧縮処理が施される。
記録ボタン24が再度押下されると、記録動作が停止され、記録メディア80にはavi 形式等の動画像ファイルが生成される。
モード選択スイッチ66によって画像再生モードが設定されると、記録メディア80から画像ファイルが読み出される。読み出された画像データは、圧縮伸長回路76によって伸長処理され、ビデオエンコーダ回路62を介して画像表示装置30に出力される。
CPU50は、本カメラシステムを統括制御する制御部であり、CPU50は、電源スイッチ64、記録ボタン24等を含んだ操作部32から受入する入力信号に基づいて、対応する回路の動作を制御し、画像表示装置30における表示の制御、ストロボ(図1の符号14)発光制御、AF検出回路90におけるオートフォーカス(AF)制御及びAE/AWB検出回路92における自動露出(AE)制御、自動ホワイトバランス(AWB)制御等を行う。
CPU50は、CCD34を介して入力された画像データに基づいて焦点評価演算やAE演算などの各種演算を行い、その演算結果に基づいてレンズ駆動部のモータドライバ96を制御して撮影レンズ12を合焦位置に移動させる一方、図示せぬアイリス駆動部を制御して絞りを適正絞り値に設定するとともにCCD34の電荷蓄積時間を制御する。
また、カメラ10の内部には不図示のROMが備えられており、該ROMにはCPU50が処理するプログラムおよび制御に必要な各種データ等が格納され、メモリー46は画像処理領域の他、CPU50が各種の演算処理等を行う作業用領域を有する。また、ROOMとは別に、EEPROM(不揮発性メモリー)を備え、各種設定情報など格納してもよい。
カメラ10の電源は、不図示のバッテリー又は不図示の電源入力端子に接続される外部電源(不図示)を用いることができる。バッテリー等から供給される電力は、DC/DCコンバータを含む電源部100によって所要の電圧に変換された後、各回路ブロックに電源供給される。
また、動画再生時にはスピーカー102を介して動画像と共に記録されている音声を再生することができる。該等動画ファイル内の音声データは音声出力処理部104によって復調されスピーカー102から外部に送出される。
カメラ10の上面を構成する連結部22には、撮像部16を第1の回動軸26の周りに回動させる第1のモータ(不図示)が備えられており、第1のモータはCPU50から送出される制御信号に従って第1のモータドライバ106を介して制御される。
なお、第1のモータは撮像部16に備えられていてもよく、第1のドライバ106は撮像部16や連結部22に備えられていてもよい。
一方、本体部20には、連結部22を第2の回動軸の回りに回動させる第2のモータ(不図示)が備えられており、第2のモータはCPU50から送出される制御信号に従って第2のモータドライバ108を介して制御される。第2のモータは連結部22に備えられていてもよく、また、第2のモータドライバ108は本体部20に備えられていてもよいし、連結部22に備えられていてもよい。
なお、撮像部16及び連結部22を回動させる回動機構には第1の回動軸26及び第2の回動軸28を形成する機構部材、該回動軸を支持するベアリング等の支持部材、該モータの軸と該回動軸とを連結させるカップリング等の連結機構などが含まれている一般的な回動機構が適用可能である。
更に、図1乃至4には図示しないが、撮像部16及び連結部22の回動位置(停止位置)を検出するためのセンサーが複数設けられている。
本実施形態では、本体部20に画像処理系、制御系、記録系、電源系を備える態様を例示したが、これらは適宜撮像部16と本体部20とに分配して配置することができる。
また、撮像部16と本体部20とを着脱可能な形状に構成してもよい。
本カメラ10は立体画像撮影機能を有しており、モード選択スイッチ68により立体撮影モードが選択され、記録ボタン24が押下されると立体画像撮影が行われる。
立体画像撮影モードでは、人間の眼幅ほど離れた2つの位置で同一被写体を撮像し、得られた2つの画像データを立体画像信号処理部110にて合成して立体画像データを生成する。なお、立体画像信号処理部110は画像信号処理部56に含まれていてもよいし、立体画像信号処理部110と画像信号処理部56とを兼用した画像信号処理手段を備えてもよい。
また、立体画像データは立体画像データ固有のファイル名が付与されて記録メディア80に記録される。立体画像データのファイル名については後述する。
図5を用いて、カメラ10が有する立体画像撮影機能について詳説する。図5にはカメラ10を用いて被写体200(花瓶に生けられた花)の有視差画像を撮像する様子を示している。
モード選択スイッチ68が立体画像撮影モードに設定されると、カメラ10は図5の上に示した第1の撮像状態202(状態1)のように第1の撮像位置に撮像部16がセットされる。即ち、メカ機構のイニシャライズが行われる。
状態1において、撮影者により画角合わせが行われ、記録ボタン24が押下されると第1の撮像位置での被写体200の撮像が行われ、第1の画像データが生成される。第1の画像データには立体画像データを生成する一方のデータ(有視差画像)であるという情報が付加されて図4に示した記録メディア80に記録される。
次に、撮像部16は自動的に第1の撮像位置から図5の下に示した第2の撮像状態(状態2)の第2の撮像位置へ移動される。言い換えると、連結部22は第2の回動軸28が回動した結果、第2の回動軸を軸として略180°回動される。一方、第1の回動軸が略180°回動することによって撮影レンズ12が反転する。
状態2に示した第2の撮像位置では被写体200の撮像が行われる。第2の撮像位置では撮影者は記録ボタンを押下する必要はなく、第2の撮像位置に撮像部16が停止すると撮像部16及び連結部22の移動機構系がロックされた状態になり、該移動機構系のロックが検出されると自動的にAE、AF等の撮像処理が行われるように制御される。第2の撮像位置は第1の撮像位置と水平面に対する高さが一致することが好ましい。
第2の撮像位置において被写体200の撮像が行われ第2の画像データが生成されると、第2の画像データに立体画像を生成するもう一方のデータ(有視差画像)があるという情報が付加されて図4に示した記録メディア80に記録される。
第2の撮像位置における撮像が終了すると、撮像部16は状態1に示した第1の撮像位置に自動的に移動される。
また、記録メディア80に記録された第1の画像データ及び第2の画像データは、一旦メモリー58に読み出された後に立体画像信号処理部110にて合成されて立体画像データが生成される。立体画像データは立体画像のデータがあるという情報を付加されて記録メディア80に記録される。なお、立体画像生成の画像処理は周知の画像処理技術を用いることとして、その説明は省略する。
図5に示すように、立体画像撮影時には本体部20底面に設けられた三脚ねじ穴を用いて本体部20を三脚210に固定されることが好ましい。
本実施形態では、記録開始指令(撮像指令)を撮影者の記録ボタン押下によって行う態様を例示したが、該記録開始指令はリモコンから発せられるリモコン信号を用いてもよいし、外部から得られるトリガー信号を用いてもよい。なお、トリガー信号はカメラ10内部に備えられたプログラムによって発生させてもよい。
図6はカメラ10の立体画像撮影機能の制御の流れを示したフローチャートである。
図5に示すようにカメラ10は三脚210に固定され、カメラ10の主電源がオンになり所定の初期化動作が終了すると、撮像可能状態になる(ステップS10)。
ここで、ステップ12において、モード選択スイッチ66により撮影モードが選択され、モード選択スイッチ68により通常撮影モードが選択されると(NO判定)、カメラ10は通常撮影モードに設定される(ステップS14)。
通常撮影モードでは、記録ボタン(レリーズボタン)24を押すことで、図5に示した状態1での撮影が行われ、通常の画像データを得ることができる(ステップS16)。通常撮影で得られた画像データは図4に示した記録メディア80に記録され、通常撮影モードの制御が終了される(図6のステップS18)。なお、通常撮影は、図5に示した状態2で行ってもよい。
一方、ステップS12において立体画像撮影モードが選択されると(YES判定)、カメラ10は立体画像撮影モードに設定される(ステップS20)。
立体画像撮影モードでは、図5に示したように被写体200を捉え記録ボタン24が押下されると(ステップS22)、図5に示した状態1において被写体200の撮像が行われ、図1乃至3に示した第1の回動軸26及び第2の回動軸28が共に自動で180°回動し(即ち、撮像部16及び連結部22が自動で180°回動し)、図5に示した状態2で被写体200の撮像が行われる(図6のステップS24)。
ステップS24において2つの有視差画像(第1の画像データ及び第2の画像データ)が得られると、図4に示した立体画像信号処理部110で該2つの画像データが合成されて立体画像データが生成される(図6のステップS26)。
立体画像が生成され、図4に示した記録メディア80に記録されると、カメラ10は自動で図5に示した状態1に戻り(図6のステップS28)、カメラ10の立体画像撮影モード制御は終了される(ステップS30)。
本カメラ10では、立体画像データを図4に示した記録メディア80に記録する際のファイル保存方法(ファイル管理システム)には、以下の方法が適用される。
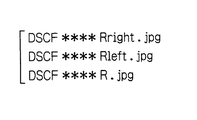
立体画像撮影モードで撮影された場合、図7に示すように、保存ファイル名の語尾にRright.jpg、RLeft.jpg 、R.jpg などを付けることによりそのファイルが立体画像撮影モードで撮影されたものであることを一目でわかるようにし、カメラ使用者がファイルを後で管理し易いようにする。ここで、.jpgはJPEG形式の画像ファイルに付加される拡張子であり、該拡張子は他のファイル形式では適用されるファイル形式固有の拡張子が付加される。
例えば、図5に示した立体画像撮影が行われると、第1の撮像位置で撮像され生成された第1の画像データにはDSCF****Rrigth.jpgといったファイル名が付与され、第2の撮像位置で撮像され生成された第2の画像データにはDSCF****Rleft.jpg といったファイル名が付与される。また、第1の画像データ及び第2の画像データを合成して生成された立体画像データにはDSCF****R.jpg といったファイル名が付与される。なお、****の部分には0001から始まる連続した4桁の番号が適用される。
即ち、立体画像撮影モードで撮影された画像データにはファイル形式(圧縮形式)を示す拡張子の他に、Rrigth、Rleft 、といった文字列が自動的に付与され、また、立体画像データにはR といった文字(文字列)が自動的に付与される。
なお、上述したファイル名はあくまでも一例であり、Rrigth、Rleft 、R に代わり他の文字(文字列)、数字(数字列)、ファイル名に使用可能な記号及びこれらの組み合わせを用いてもよい。
一方、通常撮影モードで撮影された場合には、図8に示すようにDSCF****.jpgといったファイル名の語尾には何も付けないファイル名が付与される。
ここで、本カメラ10では通常撮影モードにて撮像された画像データには、DCF 規格(Desing rule for Camera File system:デジタルカメラの統一記録フォーマット)に準拠したフォルダ名、ファイル名が自動的に付与され、DCF 規格に準拠したフォルダの構成が適用される。立体画像撮影においてもフォルダ名の付与方法やフォルダの構成等はDCF 規格に準拠し、ファイル名の付与については固有のシステムが適用される。
図9は、図4に示した記録メディア80内のファイル構造を示している。
記録メディア80へ画像データ(JPEG等)を記録すると、DCF イメージディレクトリDCIM(Digital Camera Images )の直下同一階層にDCF フォルダ100 _FUJIが生成され、フォルダ100 _FUJI内に画像データが記録される。
図9に示す例ではフォルダ100 _FUJI内には、通常撮影モードで撮影され生成された画像データDSCF0001.jpg、DSCF0002.jpg、DSCF0004.jpg及び、立体画像撮影モードにて撮影され生成された画像データDSCF0003Rrigth.jpg、DSCF0003Rleft.jpg 、DSCF0003R.jpg 、DSCF0005Rrigth.jpg、DSCF0005Rleft.jpg 、DSCF0005R.jpg が記録されている。
図9に示すように、本ファイル管理システムでは立体画像データと通常画像データとを同一フォルダ内に混在させることも可能である。
また、立体画像撮影が行われ3つの画像データ(例えば、DSCF0003Rrigth.jpg、DSCF0003Rleft.jpg 、DSCF0003R.jpg )が生成されると、図10に示すようにフォルダ100 _FUJI内にサブフォルダDSCF0003が自動的に生成され、サブフォルダDSCF0003内に立体撮影モードにて撮影され生成された画像データDSCF0003Rrigth.jpg、DSCF0003Rleft.jpg 、DSCF0003R.jpg を自動的に記録するように構成してもよい。
上記の如く構成されたカメラ10では、第1の撮像位置と、第1の撮像位置から撮像部16及び連結部22をそれぞれ略180°回動させた第2の撮像位置と、の間を撮像部16が自動的に移動して、第1の撮像位置及び第2の撮像位置でそれぞれ被写体200の撮像が行われ、得られた2つの画像データを合成して立体画像を生成することができる。したがって、撮像部(撮像装置)を2つ備えることなく、1つの撮像部を用いて自動的に立体画像を得ることができる。撮像部を2つ必要な立体画像が撮影可能なカメラに比べてコストの削減ができる。
また、上述したように立体画像撮影時と通常画像撮影時とではファイル名の語尾を変更するファイル管理システムを適用すると、取得画像ファイルの管理が容易になる。
次に、上述した立体画像撮影機能を利用してパノラマ画像を撮影する応用例について説明する。立体画像撮影では2つの撮像位置で同一被写体を撮像したが、パノラマ撮影では2つ以上の撮像位置で撮像を行い、得られた画像をつなぎ合わせてパノラマ画像を生成する。
図11は、カメラ10のパノラマ撮影機能を説明する図である。図11はカメラ10を上面から見た図である。
パノラマ撮影では、撮像部16が図5に示した状態1から時計周りに略90°回動され、図11に示した回転角0(θ=0°)の状態になる。この状態をパノラマ画像撮影の初期状態(デフォルト状態)とする。先ず、初期状態において撮像が行われ、得られた画像データはメモリー46に一旦記録される。
次に、前記初期状態から連結部22は時計回りに略π/4ラジアン(45°)回動され、カメラ10はθ=π/4ラジアン(45°)の状態になり、ここで撮像が行われる。なお、撮像時に撮像部16及び連結部22は静止している。θ=π/4ラジアンの状態で得られた画像データは初期状態において得られた画像データとは区別されてメモリー46に一時記録される。
更に、連結部22は時計回りに略45°回動され、カメラ10はθ=π/2ラジアン(90°)の状態になり、θ=π/2ラジアンの状態で撮像が行われ、θ=π/2ラジアンで得られた画像データは他の状態で撮像されたデータと区別されメモリー46に一時記憶される。
このようにして、連結部22が時計回りに略π/4ラジアンずつ回動しながら、一連の流れをθ=7π/4ラジアン(315°)の状態まで繰り返す。即ち、θ=0から略π/4ラジアン(45°)ごとにθ=0、π/4ラジアン、π/2ラジアン、3π/4ラジアン、πラジアン、5π/4ラジアン、3π/2ラジアン、7π/4ラジアンの8つ状態における画像データが生成され、8つの画像データがメモリー46に一時記憶される。
上記のように生成され、メモリー46に一時記憶された8つの画像データは、図12に示すパノラマ画像信号処理部240にて合成され全方向のパノラマ画像を得ることができる。
ここで、パノラマ画像の生成方法(画像合成方法)には、周知のパノラマ画像生成方法を適用することができ、例えば、その一態様には各画像データの共通部分をつなぎ合わせる方法がある。また、本応用例ではπ/4ラジアンごとに8箇所の撮像位置を設定したが、これは一例であり更に多くの撮像位置を設定してもよい。また、回動方向は上記の反対方向でもよい。
また、パノラマ画像を得るための一時画像をメモリー46以外の記録(記憶)手段に一時記憶させてもよい。
図12は本応用例におけるカメラ10のブロック図である。図12に示したブロック図と図4に示したブロック図との異なる部分は、モード選択スイッチ68はパノラマ撮影モードと通常撮影モードを切り換える機能であること及び立体画像信号処理部110に代わりパノラマ画像信号処理部240が備えられている部分である。
モード選択スイッチ68はパノラマ撮影モード立体撮影モード、通常撮影モードを選択可能な多接点型スイッチを用いてもよいし、ソフトウエア上でモード選択を行えるように構成してもよい。
また、パノラマ画像信号処理部240と立体画像信号処理部110とを兼用してもよいし、パノラマ画像信号処理部240、立体画像信号処理部110、画像信号処理部56を兼用した画像信号処理手段を備えてもよい。
図13はカメラ10が有するパノラマ撮影機能の制御の流れを示したフローチャートである。
図5に示すようにカメラ10が三脚210に固定され、カメラ10の主電源がオンになり所定の初期化動作が終了すると、撮像可能状態になる(ステップS100)。
ここで、ステップ102において、モード選択スイッチ66により撮影モードが選択され、モード選択スイッチ68により通常撮影モードが選択されると(NO判定)、カメラ10は通常撮影モードに設定される。
通常撮影モードでは、記録ボタン(レリーズボタン)24を押すことで、図5に示した状態1での撮影が行われ、通常の画像データを得ることができる(ステップS106)。通常撮影で得られた画像データは図12に示した記録メディア80に記録され、通常撮影モードの制御が終了される(図13のステップS108)。
一方、ステップS102においてパノラマ画像撮影モードが選択されると(YES判定)、カメラ10はパノラマ画像撮影モードに設定される(ステップS110)。
立体画像撮影モードでは、図5に示した状態1から撮像部16が時計回り略90°回動され、撮影レンズ12がカメラ10の外側を向くようにセットされる。
この状態で記録ボタン24が押下されると(ステップS112)、図11に示したθ=0の状態において撮像が行われ、この撮像位置における画像データが生成され、図12に示したメモリー46に一時記録される。
θ=0の状態における撮像が終わると、連結部22がカメラ10を上から見て略45°自動的に回動され、図11に示したθ=π/4の状態になり、自動的に撮像が行われる。このようにしてθ=7π/4の状態まで繰り返された後、得られた8つの画像が合成されて、全方向が撮像されたパノラマ画像を得ることができる。(図13のステップS114)。本応用例をカメラ10に適用すると、カメラ10を回転させる支持台を別途用意する必要がなく、手軽に全方向パノラマ画像が取得できる。また、パノラマ撮影のために機構等を備えなくてもよいのでコストの削減が可能である。
上記実施形態ではデジタルカメラを例示したが、本発明の適用範囲はデジタカメラに限定されない。動画記録を行うムービーカメラや動画及び静止画の何れも記録可能なデジタルビデオカメラにも適用可能である。また、カメラ付き携帯電話、カメラ付きパソコン、カメラ付きPDAなど撮像機能を搭載した電子機器の撮像部分や該電子機器に接続され撮像を行う撮像装置などの電子カメラに広く適用可能である。
10…デジタルカメラ、12…撮影レンズ、16…撮像部、20…本体部、22…連結部、24…記録ボタン、26…第1の回動軸、28…第2の回動軸、46…メモリー、50…CPU、56…画像信号処理部、68…モード選択スイッチ、80…記録メディア、106…第1のモータドライバ、108…第2のモータドライバ、110…立体画像信号処理部
Claims (10)
- 被写体を撮像し、得られた被写体像を画像信号に変換する撮像手段と、
前記撮像手段を第1の撮像位置から第2の撮像位置へ移動させる移動手段と、
前記移動手段によって前記撮像手段を前記第1の撮像位置から前記第2の撮像位置へ自動的に移動させるように前記移動手段の制御を行う移動制御手段と、
撮像指令に応じて前記第1の撮像位置で撮像を行い、前記第2の撮像位置への移動後に当該第2の撮像位置において第1の撮像位置における撮像と同一被写体の撮像を自動的に行うように前記撮像手段を制御する撮像制御手段と、
前記第1の撮像位置での撮像で得られた画像と前記第2の撮像位置での撮像で得られた画像とを合成して立体画像を生成する画像処理手段と、
を備えたことを特徴とする撮像装置。 - 被写体像を画像信号に変換する撮像手段を用いて、撮像指令に応じて第1の撮像位置で第1の撮像を実行し、前記第1の撮像後に前記撮像手段を前記第1の撮像位置から第2の撮像位置へ自動的に移動して、前記第2の撮像位置にて第2の撮像を自動的に実行し、前記第1の撮像により得られた第1の画像と前記第2の撮像により得られた第2の画像とを合成して立体画像を生成することを特徴とする撮像方法。
- 撮影レンズと、前記撮影レンズにより得られた被写体像を画像信号に変換する撮像素子と、を有する撮像手段を備えた撮像装置であって、
第1の回動軸を回動させて前記撮影レンズの向きを変える第1の移動手段と、
第2の回動軸を回動させて前記撮像手段を第1の撮像位置から前記第1の撮像位置と視差が異なる画像を得ることができる第2の撮像位置へ回動移動させる第2の移動手段と、
前記第1の撮像位置及び前記第2の撮像位置において前記撮像手段によって同一被写体を撮像し、有視差画像を得ることを特徴とする撮像装置。 - 前記第1の回動軸によって前記撮像手段と連結され、前記第1の回動軸を回動させる際に前記撮像手段を支持する連結部と、
前記第2の回動軸によって前記連結部と連結され、前記第2の回動軸を回動させる際に前記連結部を支持する本体部と、
を備えたことを特徴とする請求項3記載の撮像装置。 - 前記第2の移動手段によって前記撮像手段を前記第1の撮像位置から前記第2の撮像位置へ自動的に回動移動させると共に、前記第1の移動手段により前記第1の回動軸を回動させて撮影レンズの向きを自動的に変えるように制御する回動制御手段を備えたことを特徴とする請求項3又は4記載の撮像装置。
- 前記第1の撮像位置での撮像指令に応じて前記第1の撮像位置で撮像を行い、前記撮像手段が前記第1の撮像位置から前記第2の撮像位置へ移動されると、前記第2の撮像位置にて前記第1の撮像位置と同一被写体を自動的に撮像するように制御する撮像制御手段を備えたことを特徴とする請求項3、4又は5記載の撮像装置。
- 前記第1の撮像位置及び前記第2の撮像位置において撮像されて得られた有視差画像を合成して立体画像を生成する画像処理手段を備えたことを特徴とする請求項3乃至6のうち何れか1項に記載の撮像装置。
- 前記画像処理手段で生成された立体画像を記録する記録手段を備えたことを特徴とする請求項7記載の撮像装置。
- 前記回動制御手段は、前記第1の移動手段或いは前記第2の移動手段のうち少なくとも何れか一方を用いて前記撮像手段を前記本体部に対して所定の角度ずつ回動させる制御を行い、
前記撮像制御手段は、前記撮像手段の移動位置ごとに前記撮像手段を用いて撮像を行うように制御し、
該移動位置において撮像されて得られた複数の画像データを合成してパノラマ画像を生成するパノラマ画像生成手段を備えたことを特徴とする請求項3記載の撮像装置。 - 前記移動制御手段は、前記第2の移動手段を用いて前記撮像手段を前記本体部に対して所定の角度ずつ略360°回動させる制御を行い、
前記撮像制御手段は、前記撮像手段の移動位置ごとに前記撮像手段を用いて撮像を行うように制御し、
前記パノラマ画像生成手段は該移動位置において撮影され生成された複数の画像データを合成して全方向のパノラマ画像を生成することを特徴とする請求項3記載の撮像装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004035285A JP2005229290A (ja) | 2004-02-12 | 2004-02-12 | 撮像装置及び撮像方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004035285A JP2005229290A (ja) | 2004-02-12 | 2004-02-12 | 撮像装置及び撮像方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005229290A true JP2005229290A (ja) | 2005-08-25 |
Family
ID=35003672
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004035285A Pending JP2005229290A (ja) | 2004-02-12 | 2004-02-12 | 撮像装置及び撮像方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005229290A (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008061237A (ja) * | 2006-08-28 | 2008-03-13 | Avago Technologies General Ip (Singapore) Private Ltd | 小さいセンサアレイを用いてパノラマ画像を構成するシステム及び方法 |
| US7616883B2 (en) | 2006-04-28 | 2009-11-10 | Eastman Kodak Company | User-rotatable camera for enhancing panoramic image capture |
| JP2010206495A (ja) * | 2009-03-03 | 2010-09-16 | Olympus Medical Systems Corp | 電子画像観察装置 |
| CN101917547A (zh) * | 2009-03-31 | 2010-12-15 | 卡西欧计算机株式会社 | 拍摄装置和拍摄控制方法 |
| CN102645834A (zh) * | 2011-02-22 | 2012-08-22 | 国基电子(上海)有限公司 | 具有照相功能的电子装置及方法 |
| JP2013020100A (ja) * | 2011-07-12 | 2013-01-31 | Canon Inc | 撮像装置 |
| KR101751347B1 (ko) * | 2015-06-16 | 2017-07-11 | 엘지전자 주식회사 | 이동 단말기 및 이의 제어방법 |
| US9906719B2 (en) | 2011-08-02 | 2018-02-27 | Sony Corporation | Image processing device and associated methodology for generating panoramic images |
| CN107800945A (zh) * | 2016-08-31 | 2018-03-13 | 北京小米移动软件有限公司 | 全景拍照的方法及装置、电子设备 |
| US10200609B2 (en) | 2010-11-11 | 2019-02-05 | Sony Corporation | Imaging apparatus, imaging method, and program |
-
2004
- 2004-02-12 JP JP2004035285A patent/JP2005229290A/ja active Pending
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7616883B2 (en) | 2006-04-28 | 2009-11-10 | Eastman Kodak Company | User-rotatable camera for enhancing panoramic image capture |
| JP2008061237A (ja) * | 2006-08-28 | 2008-03-13 | Avago Technologies General Ip (Singapore) Private Ltd | 小さいセンサアレイを用いてパノラマ画像を構成するシステム及び方法 |
| US7912319B2 (en) | 2006-08-28 | 2011-03-22 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Systems and methods for panoramic image construction using small sensor array |
| JP2010206495A (ja) * | 2009-03-03 | 2010-09-16 | Olympus Medical Systems Corp | 電子画像観察装置 |
| CN101917547A (zh) * | 2009-03-31 | 2010-12-15 | 卡西欧计算机株式会社 | 拍摄装置和拍摄控制方法 |
| US10225469B2 (en) | 2010-11-11 | 2019-03-05 | Sony Corporation | Imaging apparatus, imaging method, and program |
| US10200609B2 (en) | 2010-11-11 | 2019-02-05 | Sony Corporation | Imaging apparatus, imaging method, and program |
| US10244169B2 (en) | 2010-11-11 | 2019-03-26 | Sony Corporation | Imaging apparatus, imaging method, and program |
| US10362222B2 (en) | 2010-11-11 | 2019-07-23 | Sony Corporation | Imaging apparatus, imaging method, and program |
| CN102645834A (zh) * | 2011-02-22 | 2012-08-22 | 国基电子(上海)有限公司 | 具有照相功能的电子装置及方法 |
| JP2013020100A (ja) * | 2011-07-12 | 2013-01-31 | Canon Inc | 撮像装置 |
| US9906719B2 (en) | 2011-08-02 | 2018-02-27 | Sony Corporation | Image processing device and associated methodology for generating panoramic images |
| US11575830B2 (en) | 2011-08-02 | 2023-02-07 | Sony Group Corporation | Image processing device and associated methodology for generating panoramic images |
| US11917299B2 (en) | 2011-08-02 | 2024-02-27 | Sony Group Corporation | Image processing device and associated methodology for generating panoramic images |
| KR101751347B1 (ko) * | 2015-06-16 | 2017-07-11 | 엘지전자 주식회사 | 이동 단말기 및 이의 제어방법 |
| US10033925B2 (en) | 2015-06-16 | 2018-07-24 | Lg Electronics Inc. | Mobile terminal and method of controlling the same |
| CN107800945A (zh) * | 2016-08-31 | 2018-03-13 | 北京小米移动软件有限公司 | 全景拍照的方法及装置、电子设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4406937B2 (ja) | 撮影装置 | |
| JP4236986B2 (ja) | 撮影装置および方法並びにプログラム | |
| JP2009147730A (ja) | 動画生成装置、動画撮影装置、動画生成方法及びプログラム | |
| JP4764854B2 (ja) | 撮像装置、画像再生装置、撮像方法、システム及びプログラム | |
| JPWO2012002307A1 (ja) | 単眼立体撮像装置 | |
| JP2005229291A (ja) | 画像記録装置及び撮像装置並びに画像ファイル保存方法 | |
| JP2009058834A (ja) | 撮像装置 | |
| JP4161471B2 (ja) | 電子カメラ及びカメラシステム | |
| JP2005229290A (ja) | 撮像装置及び撮像方法 | |
| JP2009071592A (ja) | 撮像装置及び撮像制御方法 | |
| JP2008028960A (ja) | 撮影装置及び露出制御方法 | |
| JP2005228400A (ja) | 音声記録装置及び音声記録方法 | |
| JP3978640B2 (ja) | 電子カメラ | |
| JP4697078B2 (ja) | 撮像装置及びそのプログラム | |
| JP2017191982A (ja) | 撮像装置、撮像システム、撮像方法およびプログラム | |
| CN102209199B (zh) | 图像拍摄装置 | |
| JP4049291B2 (ja) | デジタルスチルカメラ | |
| JP4748442B2 (ja) | 撮像装置及びそのプログラム | |
| JP5600413B2 (ja) | 撮影機器システム、外部機器、カメラ、および撮影機器システムの制御方法 | |
| JP3890897B2 (ja) | カメラ装置及び記録媒体 | |
| JP4096889B2 (ja) | カメラ装置及びスルー画像表示方法 | |
| JP3721965B2 (ja) | 電子スチルカメラ及びその画像記録方法、並びに記録媒体 | |
| JP4753101B2 (ja) | 電子カメラ | |
| JP2005026786A (ja) | 画像撮影装置 | |
| JP4085320B2 (ja) | デジタルカメラ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20061213 |