JP2005255103A - 電動パーキングブレーキ装置 - Google Patents
電動パーキングブレーキ装置 Download PDFInfo
- Publication number
- JP2005255103A JP2005255103A JP2004072857A JP2004072857A JP2005255103A JP 2005255103 A JP2005255103 A JP 2005255103A JP 2004072857 A JP2004072857 A JP 2004072857A JP 2004072857 A JP2004072857 A JP 2004072857A JP 2005255103 A JP2005255103 A JP 2005255103A
- Authority
- JP
- Japan
- Prior art keywords
- parking brake
- detection sensor
- vehicle
- signal
- brake
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Landscapes
- Regulating Braking Force (AREA)
Abstract
【課題】 パーキングブレーキ19の自動作動のタイミングについて適切化を図ることが可能な電動パーキングブレーキ装置を提供する。
【解決手段】 電動パーキングブレーキ装置1は、車両のパーキングブレーキ19を自動作動させるものである。この装置1は、車両が停車状態にあると判断した後に、ブレーキペダルが踏み込まれた状態から解除方向に戻されつつ規定位置に達したときに、パーキングブレーキを自動作動させることとしている。このため、運転者のブレーキペダル解除という意思確認によりパーキングブレーキ19の自動作動を行っている。
【選択図】 図2
【解決手段】 電動パーキングブレーキ装置1は、車両のパーキングブレーキ19を自動作動させるものである。この装置1は、車両が停車状態にあると判断した後に、ブレーキペダルが踏み込まれた状態から解除方向に戻されつつ規定位置に達したときに、パーキングブレーキを自動作動させることとしている。このため、運転者のブレーキペダル解除という意思確認によりパーキングブレーキ19の自動作動を行っている。
【選択図】 図2
Description
本発明は、電動パーキングブレーキ装置に関する。
従来、乗員の手動操作に代えて、電動にてパーキングブレーキの作動及び解除をする電動パーキングブレーキ装置が知られている。また、従来の電動パーキングブレーキ装置としては、車両が停車状態であって、その状態が所定時間継続することで、パーキングブレーキを自動作動させるものが知られている(例えば、特許文献1参照)。
特開平7−144623号公報
しかしながら、従来の電動パーキングブレーキ装置では、停車状態において所定時間経過するとパーキングブレーキが自動作動してしまうことから、ほぼ停車毎に自動作動することとなり、運転者の意思に沿わず、却って煩わしさを与える可能性があった。特に、所定時間の設定が短かった場合などには、一層運転者の意思に沿わないものとなる。
本発明はこのような従来の課題を解決するためになされたものであり、その目的とするところは、パーキングブレーキの自動作動のタイミングについて適切化を図ることが可能な電動パーキングブレーキ装置を提供することにある。
本発明によれば、電動パーキングブレーキ装置は、車両のパーキングブレーキを自動作動させるものであって、車輪速検出センサと、ブレーキペダル操作検出センサとを備えている。車輪速検出センサは、車輪の回転を検出するものである。ブレーキペダル操作検出センサはブレーキペダルの操作を検出するものである。
さらに、電動パーキングブレーキ装置は制御手段を備えている。この制御手段は、車輪速検出センサからの信号により車両が停車状態にあると判断した後に、ブレーキペダル操作検出センサからの信号に基づいて、ブレーキペダルが踏み込まれた状態から解除方向に戻されつつ規定位置に達したと判断したときに、パーキングブレーキを自動作動させる構成となっている。
本発明によれば、車両が停車状態にあると判断した後に、ブレーキペダルが踏み込まれた状態から解除方向に戻されつつ規定位置に達したと判断したときに、パーキングブレーキを自動作動させている。このため、車両が停車状態にあったとしても、ブレーキペダルを解除しようとする運転者の意思が確認されない限り、パーキングブレーキは自動作動しないようになっている。故に、ほぼ停車毎にパーキングブレーキが自動作動してしまう事態を防止することとなる。
従って、パーキングブレーキの自動作動のタイミングについて適切化を図ることができる。
以下、本発明の好適な実施形態を図面に基づいて説明する。まず、以下の各実施形態にて説明する電動パーキングブレーキ装置は、運転者の意思を確認することにより、好適なタイミングでパーキングブレーキ19を自動作動させるものである。
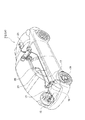
図1及び図2は、第1実施形態に係る電動パーキングブレーキ装置全体の構成図であり、図1は電動パーキングブレーキ装置の車両設置状態を示し、図2は電動パーキングブレーキ装置の詳細構成を示している。
まず、これらの図に示すように、電動パーキングブレーキ装置1は、ECU(制御手段)11とアクチュエータ13とからなるコントロールユニット10、イコライザ15、PKBケーブル17及びパーキングブレーキ19を備えている。また、電動パーキングブレーキ装置1は、電源部21、ヒューズ23、エマージェンシー解除操作部25、及び解除ケーブル27を具備している。さらに、電動パーキングブレーキ装置1は、インジケータランプ(警報手段)29、各種センサ31〜59、メインハーネス61、コネクタ63及びボディハーネス65を有している。
電動パーキングブレーキ装置1は、ECU11により制御されるアクチュエータ13がイコライザ15及びPKBケーブル17を介して、車両後輪側に設置されたパーキングブレーキ19を自動解除及び自動作動させるものである。
また、上記ECU11とアクチュエータ13とは、電源部21に接続されている。電源部21は、ヒューズ23を介してECU11とアクチュエータ13とに電圧を供給するものであり、詳しくは電源部21の第1端子21aから第1ヒューズ23a介してECU11に電圧を供給し、第2端子21bから第2ヒューズ23b介してアクチュエータ13に電圧を供給する構成となっている。
また、エマージェンシー解除操作部25は、解除ケーブル27を介してアクチュエータ13に接続されており、手動にて操作されることにより早期にアクチュエータ13を作動させ、パーキングブレーキ19を解除させることが可能とされたものである。
また、インジケータランプ29及び各種センサ・スイッチ31〜59は、メインハーネス61、コネクタ63及びボディハーネス65を介してECU11に接続されている。ここで、インジケータランプ29は、パーキングブレーキ19の自動解除及び自動作動や、システム異常などの状態を表示するためのものであって、ECU11からの信号により点灯及び消灯するものである。
また、各種センサ・スイッチ31〜59それぞれは、検出結果又は入力内容に応じた信号をECU11に送信する構成となっている。図3は、第1実施形態に係る電動パーキングブレーキ装置1の一部構成図である。同図に示すように、操作スイッチ31は、アクチュエータ13を作動させるためのスイッチである。また、操作スイッチ31は、操作内容に応じた信号をECU11に送信する構成となっている。このため、ECU11は、アクチュエータ13を作動させ、パーキングブレーキ19の電動による解除及び作動を行うようになっている。
また、イグニッションセンサ33は、イグニッションスイッチの状態を検出するものであり、イグニッションOFFの状態であるか、アクセサリONの状態であるか、エンジン作動状態であるかを検出し、検出した情報をECU11に送信する構成となっている。また、イグニッションセンサ33は、車両キーが挿入されているか否かについても検出する構成とされており、キーの挿入又は非挿入の情報をECU11に送信する構成となっている。
アクセルポジションセンサ35は、アクセルペダルの操作を検出するためのものであって、具体的にはアクセルペダル部に設置されてアクセルペダルの動きに同期したポジション情報をECU11に送信する構成となっている。ブレーキポジションセンサ(ブレーキペダル操作検出センサ)37は、ブレーキペダル部に設置され、ブレーキペダルの動きに同期して、ブレーキペダルのポジション情報をECU11に送信する構成となっている。クラッチポジションセンサ(クラッチペダル操作検出センサ)39は、クラッチペダルの操作を検出するためのものであって、アクセルポジションセンサ35やブレーキポジションセンサ37と同様に、クラッチペダルの動きに同期したポジション情報をECU11に送信する構成とされている。
また、エンジン回転数検出センサ41及びエンジントルク検出センサ43は、それぞれエンジンの回転数及びトルクの情報を検出してECU11に送信するものである。シフトポジション検出センサ45は、シフトポジションの状態、すなわちドライブポジションであるか、ニュートラルポジションであるかなどを検出し、ECU11にその情報を送信するものである。
シート圧力センサ47は、運転者用シートの座面に設置され、シートに加わる圧力を検出し、その圧力の情報をECU11に送信するものである。A/Tモードスイッチ49は、オートマティック車のシフトチェンジのパターンを変更できるスイッチであって、通常モード、スポーツモード、及びスノーモードを選択可能とされたものである。そして、A/Tモードスイッチ49は、選択されたモードの情報をECU11に送信し、ECU11はモードに応じたシフトチェンジのパターンで車両制御することとなる。
ライニング温度センサ51は、RRブレーキパッド又はライニング内部に設置されており、RRブレーキ摩擦材の温度を検出し、その温度情報をECU11に送信するものである。荷重センサ53は、アクチュエータ13の内部に設置されており、PKBケーブル17のアクチュエータ側の端部に加わる荷重を計測し、その情報をECU11に送信するものである。
また、勾配センサ(傾斜角検出センサ)55は、車両が停車している路面の傾斜角を検出するものであり、検出した路面傾斜角の情報をECU11に送信する構成となっている。車輪速センサ(車輪速検出センサ)57は、4輪のアクスルハウジング部位に設けられており、各車輪の回転情報を検出し、ECU11に送信する構成となっている。さらに、減速機回転センサ59は、アクチュエータ13の内部に設置され、アクチュエータ内のギヤ(後述する減速機67)の回転数を検出してその情報をECU11に送信する構成となっている。
そして、ECU11は、上記各種センサ・スイッチ31〜59からの信号に基づいて、パーキングブレーキ19の自動解除及び自動作動するようになっており、自動解除及び自動作動する際には、アクチュータ13を作動させるようになっている。
また、図3に示すように、アクチュエータ13は、モータMと減速機67とを備えておいる。次にアクチュータ13を備えるコントロールユニット10について、図4を参照して説明する。
図4は、電動パーキングブレーキ装置1のコントロールユニット10の内部構成図である。同図に示すように、コントロールユニット10は、ECU11及びアクチュエータ13がハウジング69に収納された構成となっている。具体的に説明すると、ECU11は、モータMに接続されており、モータMを正転駆動又は逆転駆動させるようになっている。また、モータMは、減速機67に接続されている。減速機67は、駆動ギヤ71、ガイドシャフト73、第1従動ギヤ75、駆動シャフト77、及び第2従動ギヤ79からなっている。
駆動ギヤ71は、モータMに接続され、モータMからの回転力を、ガイドシャフト73により軸支される第1従動ギヤ75に伝えるようになっている。また、第1従動ギヤ75は、駆動シャフト77により軸支される第2従動ギヤ79に接続され、自己の回転力を第2従動ギヤ79に伝達するようになっている。さらに、駆動シャフト77は、ねじ切り加工され、ねじ切り部と噛み合うように駆動ナット81が取り付けられている。このため、駆動ナット81は、第2従動ギヤ79が回転すると駆動シャフト77の延在方向に沿って移動することとなる。また、駆動ナット81には荷重センサ53(図示せず)を有するケーシング83に連結されている。このため、ケーシング83は、駆動ナット81の移動に合わせて駆動シャフト77の長手方向に移動可能となっている。
このように構成されるため、ECU11は、モータMを正転駆動又は逆転駆動させ、角ギヤ71,75,79を通して駆動シャフト77を回転させることとなる。そして、ECU11は、駆動シャフト77の回転により駆動ナット81を移動させ、この移動によりケーシング83を駆動シャフト77の延在方向に移動させてPKBケーブル17を引き込み又は繰り出しすることとなる。そして、この引き込み又は繰り出しによって、パーキングブレーキ19は解除又は作動することとなる。
次に第1実施形態に係る電動パーキングブレーキ装置1の動作の概略を図3及び図4を参照して説明する。まず、ECU11は、車輪速センサ57からの信号を読み込む。そして、ECU11は、車両が停車状態であるか否か判断する。
その後、ECU11は、車輪速センサ57からの信号により、車両が停車状態にあると判断した場合に、ブレーキポジションセンサ37から信号を読み込む。そして、ECU11は、検出されたブレーキペダルのポジションから、ブレーキペダルが踏み込まれた状態から解除方向に戻されつつあるか否かを判断する。
ここで、解除方向に戻されつつない場合、ECU11は、ブレーキペダルの踏み込みにより車両の停止状態が保たれていることから、パーキングブレーキ19の自動作動の必要性がないと判断する。一方、解除方向に戻されつつある場合、ECU11は、ブレーキペダルが規定位置に達したか否かを判断する。そして、ECU11は、ブレーキペダルが規定位置に達したと判断した場合、運転者のブレーキペダルによるブレーキングを解除する意思が確認できたと判断し、ブレーキペダルによるブレーキングに代えてパーキングブレーキ19を自動的に作動させる。このように、電動パーキングブレーキ装置1は、運転者の意思を確認することで、運転者の意図に沿わない自動作動を防止できることとなる。
ここで、マニュアル車については、パーキングブレーキ19の好適な自動作動を実現させるべく、以下のようにすることが望ましい。すなわち、ECU11は、ブレーキポジションセンサ37及び車輪速センサ57からの信号に加えて、クラッチポジションセンサ39及びエンジン回転数検出センサ41からの信号を読み込む。
そして、ECU11は、車両の停車状態を判断し、その後、ブレーキペダルが踏み込まれた状態から解除方向に戻されつつ規定位置に達したと判断したことに加え、クラッチペダルが踏み込まれていないこと、及び、エンジンの作動状態であることを検出したときに、パーキングブレーキ19を自動作動させる。
ここで、車両停車時において、クラッチペダルが踏み込まれておらず、且つエンジンの作動状態が検出されている場合、シフトレバーはニュートラルポジションにあるといえる。なぜなら、例えば、車両停車時にクラッチペダルが踏み込まれていない場合において、シフトレバーがニュートラルポジションにないときには、いわゆるエンストが発生してしまうからである。
すなわち、ECU11は、シフトレバーがニュートラルポジションにある状態で、ブレーキペダルが解除方向に戻されつつ規定位置に達したときにパーキングブレーキ19を自動作動させることとなる。ここで、通常、運転者はパーキングブレーキ19を作動させるにあたりシフトレバーをニュートラルポジションにする傾向にある。このため、運転者がパーキングブレーキ19を作動させやすい状態において、ブレーキペダルを解除しようとする運転者の意思が確認されると、パーキングブレーキ19を自動作動させることとなる。従って、一層好適なパーキングブレーキ19を自動作動させることができることとなる。
また、マニュアル車及びオートマティック車の双方については、以下のように構成してもよい。すなわち、ECU11は、ブレーキポジションセンサ37及び車輪速センサ57からの信号に加えて、シフトポジション検出センサ45からの信号を読み込むようにする。
そして、ECU11は、車両の停車状態を判断し、その後、ブレーキペダルが踏み込まれた状態から解除方向に戻されつつ規定位置に達したと判断したことに加え、シフトポジションがニュートラルポジションにあると判断したときに、パーキングブレーキ19を自動作動させる。これにより、上記と同様に、一層好適なパーキングブレーキ19を自動作動させることができることとなる。
次に、図5及び図6を参照して、第1実施形態に係る電動パーキングブレーキ装置1の詳細動作を説明する。図5は、第1実施形態に係る電動パーキングブレーキ装置1の詳細動作を示すフローチャートである。なお、図5に示すフローチャートは、マニュアル車に搭載される電動パーキングブレーキ装置1による処理を示すものである。
まず、ECU11は、イグニッションセンサ33からの信号に基づいてエンジンが作動しているか否かを判断する(ST10)。なお、ステップST10では、イグニッションセンサ33からの信号に代えて、エンジン回転数検出センサ41からの信号によりエンジンが作動しているか否かを判断するようにしてもよい。
ここで、エンジンが作動していないと判断した場合(ST10:NO)、図5に示す処理は終了する。一方、エンジンが作動していると判断した場合(ST10:YES)、ECU11は、パーキングブレーキ19が解除状態か否かを判断する(ST11)。
パーキングブレーキ19が解除状態でないと判断した場合(ST11:NO)、すなわちパーキングブレーキ19が作動状態である場合、自動作動の必要性がないことから、図5に示す処理は終了する。
他方、パーキングブレーキ19が解除状態であると判断した場合(ST11:YES)、ECU11は、車輪速センサ57からの信号に基づいて、車速が「0」であるか否かを判断する(ST12)。この際、ECU11は、微速であっても車速が「0」であると判断する。
そして、車速が「0」でないと判断した場合(ST12:NO)、車両走行中であると判断できるため、図5に示す処理は終了する。一方、車速が「0」であると判断した場合(ST12:YES)、ECU11は、ブレーキポジションセンサ37から信号に基づいて、ブレーキペダルが踏み込まれているか否かを判断する(ST13)。ブレーキペダルが踏み込まれていない場合(ST13:NO)、図5に示す処理は終了する。他方、ブレーキペダルが踏み込まれている場合(ST13:YES)、ECU11は、クラッチポジションセンサ39からの信号に基づいて、クラッチペダルが踏み込まれていないか否か、すなわちクラッチペダルがオフ状態であるか否かを判断する(ST14)。
そして、クラッチペダルがオフ状態でないと判断した場合(ST14:NO)、すなわちクラッチペダルが踏み込まれている場合、図5に示す処理は終了する。一方、クラッチペダルがオフ状態であると判断した場合(ST14:YES)、すなわちクラッチペダルが踏み込まれていない場合、ECU11はブレーキポジションセンサ37からの信号に基づいて、ブレーキペダルの戻り量Bpxを監視する。
そして、ECU11は、ブレーキペダルの戻り量Bpxが所定の閾値Bp0を超えたか否かを(すなわち規定位置に達したか否かを)判断する(ST15)。なお、ステップST14の処理からステップST15の処理に至るまでの間にECU11は、一定時間ブレーキペダルの戻り量Bpxを監視し続けることにより、戻り量Bpxが所定の閾値Bp0を超えたか否かを判断することが望ましい。または、ステップST14からステップST15に至る間に一定時間待機するようにしてもよい。ステップST13においてブレーキペダルの踏み込みが確認されているため、ステップST15の処理を迅速に実行してしまうと、戻り量Bpxが「0」と判断されて、必然的に「NO」と判断されてしまうからである。
ここで、戻り量Bpxが所定の閾値Bp0を超えていないと判断した場合(ST15:NO)、ブレーキペダルによるブレーキングを解除する運転者の意思が確実に確認できたとはいえず、図5に示す処理は終了する。他方、戻り量Bpxが所定の閾値Bp0を超えたと判断した場合(ST15:YES)、ブレーキペダルによるブレーキングを解除する運転者の意思が確認されたことから、ECU11はパーキングブレーキ19を自動作動させる(ST16)。
ここで、図6を参照する。図6は、ブレーキペダルポジションBpx及び所定の閾値Bp0、並びにパーキングブレーキ19の自動作動の様子を示すタイミングチャートである。まず、運転者は完全にブレーキペダルを踏み込んでいる(時刻0〜T11)。その後、運転者がブレーキペダルの戻し操作をしたとする(時刻T11)。しかし、ブレーキペダルポジションBpxが所定の閾値Bp0を超えない段階では、未だパーキングブレーキ19は自動作動されない(時刻T11〜T12)。
次いで、ブレーキペダルポジションBpxが所定の閾値Bp0を超えると、パーキングブレーキ19の自動作動が開始する(時刻T12)。そして、パーキングブレーキ19が一定の速度で自動作動した後(時刻T12〜T13)、ブレーキペダルの戻し操作が終了する(時刻T14)。このように、運転者のブレーキペダル解除という意思を確認し、パーキングブレーキ19の自動作動を行うことで、運転者にとって自然なパーキングブレーキ19の自動作動を可能としている。
なお、パーキングブレーキ19は、モータMが作動し、減速機67を通じてPKBケーブル17が引き込まれることで、自動作動する。すなわち、図4に示す構成例において、ECU11は、モータMを作動させる。そして、ECU11は、第2従動ギヤ79を回転させて、ケーシング83をECU側に移動させる。これにより、ECU11は、PKBケーブル17を引き込んでパーキングブレーキ19を自動作動させる。
再度、図5を参照する。以上のようにしてパーキングブレーキ19の自動作動を行った後、ECU11はパーキングブレーキ19の自動作動についての警告情報をインジケータランプ29に送信する(ST16)。そして、インジケータランプ29は、自動作動の旨を点灯により運転者に報知する。これにより、運転者はパーキングブレーキ19が自動作動されたことを認識することができる。また、運転者は、車両発進に際してパーキングブレーキ19を自ら解除しなければならないことを知ることとなる。その後、図5に示す処理は終了する。
このようにして、第1実施形態に係る電動パーキングブレーキ装置1によれば、車両が停車状態にあると判断した後に、ブレーキペダルが踏み込まれた状態から解除方向に戻されつつ規定位置に達したと判断したときに、パーキングブレーキ19を自動作動させている。このため、車両が停車状態にあったとしても、ブレーキペダルを解除しようとする運転者の意思が確認されない限り、パーキングブレーキ19は自動作動しないようになっている。故に、ほぼ停車毎にパーキングブレーキ19が自動作動してしまう事態を防止することとなる。
従って、パーキングブレーキ19の自動作動のタイミングについて適切化を図ることができる。
また、車両が停車状態にあると判断した後に、ブレーキペダルが踏み込まれた状態から解除方向に戻されつつ規定位置に達したことに加え、クラッチペダルが踏み込まれておらず、且つエンジンの作動状態が検出されたときに、パーキングブレーキ19を自動作動している。
ここで、クラッチペダルが踏み込まれておらず、且つエンジンの作動状態が検出されている場合、シフトレバーはニュートラルポジションにあるといえる。すなわち、クラッチペダルが踏み込まれておらず且つエンジンが作動している場合、車両走行中であるか又はシフトレバーがニュートラルポジションにあるといえる。そして、車両が停車状態であることからすると、必然的にシフトレバーはニュートラルポジションにあるといえる。このため、シフトレバーがニュートラルポジションにある状態で、ブレーキペダルが解除方向に戻されつつ規定位置に達したときにパーキングブレーキ19を自動作動させることとなる。
また、通常、運転者はパーキングブレーキ19を作動させるにあたりシフトレバーをニュートラルポジションにする傾向にある。このため、運転者がパーキングブレーキ19を作動させやすい状態において、ブレーキペダルを解除しようとする運転者の意思が確認されると、パーキングブレーキ19を自動作動させることとなる。
従って、一層好適なタイミングでパーキングブレーキ19を自動作動させることができる。
また、車両が停車状態にあると判断した後に、ブレーキペダルが踏み込まれた状態から解除方向に戻されつつ規定位置に達したことに加え、シフトポジションがニュートラルポジションにあると判断したときに、パーキングブレーキ19を自動作動している。ここで、一般的に運転者はパーキングブレーキ19を作動させるにあたりシフトレバーをニュートラルポジションにする傾向にある。このため、運転者がパーキングブレーキ19を作動させやすい状態において、ブレーキペダルを解除しようとする運転者の意思が確認されると、パーキングブレーキ19を自動作動させることとなる。従って、一層好適なタイミングでパーキングブレーキ19を自動作動させることができる。
また、パーキングブレーキ19を自動作動させる際に運転者に対し警報を行うので、運転者はパーキングブレーキ19が自動作動されたことを認識することができる。また、電動パーキングブレーキ装置1がパーキングブレーキ19の自動解除の機能を備えていない場合、運転者は、パーキングブレーキ19を自ら解除しなければならないことを知ることとなる。このため、車両発進に際してパーキングブレーキ19による作動に気が付かず、発進を手間取ることがないようにすることができる。
次に、第2実施形態に係る電動パーキングブレーキ装置2について説明する。第2実施形態に係る電動パーキングブレーキ装置2は、第1実施形態のものとほぼ同様であるが、パーキングブレーキ19の自動作動処理が一部異なっている。具体的に第2実施形態において、ECU11は、ブレーキペダルを踏み込んでから戻すときの戻し速度が速くなるに従って、所定の閾値Bp0を変化させるようにしている。また、パーキングブレーキ19を自動作動させる際のブレーキ解除速度を変化させるようにしている。
図7は、第2実施形態に係るブレーキペダルポジションBpx及び所定の閾値Bp0、並びにパーキングブレーキ19の自動作動の様子を示すタイミングチャートである。まず、同図に示すように、ブレーキポジションセンサ37からの信号により、ブレーキペダルの戻り量Bpxが所定の閾値Bp0を超えたと判断すると、ECU11はパーキングブレーキ19を自動作動させる。この点は、第1実施形態と同様である。
ところが、ブレーキペダルの戻し速度が速くなった場合、上記と同様にパーキングブレーキ19の自動作動を行うと、ブレーキペダルの戻りが先に終了し、パーキングブレーキ19の自動作動が終了していない事態が生じ得る。すなわち、両者のブレーキング完了までの時間にズレが生じ、不充分なブレーキング状態が発生しえる。
そこで、第2実施形態では以下のように制御して、好適なパーキングブレーキ19の自動作動を行うこととしている。まず、第1に、ECU11はブレーキポジションセンサ37からの信号に基づいて検出されるブレーキペダルの戻し速度が速くなるに従って、規定位置をブレーキペダルの踏み込み側に変化させることとしている。すなわち、ECU11は、所定の閾値Bp0を低い値に変化させる。これにより、パーキングブレーキ19の自動作動にあたり、自動作動の開始を早めるようにしている。
具体的にECU11は例えば図7に示すようにパーキングブレーキ19を制御する。すなわち、戻し速度が通常である場合、第1実施形態にて示したのと同様に、ブレーキペダルの戻り量Bpxが所定の閾値Bp0を超えた段階で(時刻T23)、パーキングブレーキ19の自動作動を開始している。これに対し、戻し速度が速くなると、ブレーキペダルの戻り量Bpxが所定の閾値Bp0よりも小さい閾値Bp0’を超えた段階で(時刻T22)、パーキングブレーキ19の自動作動を開始する。
また、第2に、ECU11は、戻し速度が速くなるに従って、パーキングブレーキ19を自動作動させる際のブレーキ作動速度を速くさせることとしている。具体的には例えば図7に示すようにする。すなわち、戻し速度が通常である場合、第1実施形態にて示したのと同様に、時刻T23〜時刻T25までの時間を要してパーキングブレーキ19の自動作動を完了している。これに対し、戻し速度が速くなると、時刻T23〜時刻T25までの時間よりも短い時刻T23〜時刻T24までの時間でパーキングブレーキ19の自動作動を完了している。
すなわち、ECU11は、ブレーキ作動速度を速くしてパーキングブレーキ19の自動作動完了までに要する時間を短くし、不充分なブレーキング状態の発生を抑制するようにしている。
このようにして、第2実施形態に係る電動パーキングブレーキ装置2によれば、第1実施形態と同様に、パーキングブレーキ19の自動作動のタイミングについて適切化を図ることができる。
また、一層好適なタイミングでパーキングブレーキ19を自動作動させることができる。また、運転者はパーキングブレーキ19が自動作動されたことを認識することができ、電動パーキングブレーキ装置1がパーキングブレーキ19の自動解除の機能を備えていない場合であっても、発進を手間取ることがないようにすることができる。
さらに、第2実施形態によれば、ブレーキペダルの戻し速度が速くなるに従って、規定位置をブレーキペダルの踏み込み側に変化させている。ここで、ブレーキペダルの戻し速度が速くなると、戻し速度が遅いときよりも早期にブレーキペダルによるブレーキングが解除状態となる。このため、パーキングブレーキ19の自動作動についても早めに行わなければ不充分なブレーキング状態が発生しえる。ところが、戻し速度が速くなったときには、規定位置をブレーキペダルの踏み込み側に変化させるので、パーキングブレーキ19の自動作動の開始時点を早めることとなる。
このため、早期にブレーキペダルによるブレーキングが解除状態となったとしても、パーキングブレーキ19の作動を早めて、不充分なブレーキング状態となることを回避することとなる。従って、パーキングブレーキ19の自動作動を好適に行うことができる。
また、ブレーキペダルが踏み込まれた状態から解除方向に戻されるときの戻し速度が速くなるに従って、パーキングブレーキ19を自動作動させる際のブレーキ作動速度を速くしている。ここで、ブレーキ作動速度を速くすると、パーキングブレーキ19の作動完了までの時間を短くできる。このため、早期にブレーキペダルによるブレーキングが解除状態となるような場合にあっても、パーキングブレーキ19の作動完了までの時間を短くすることで、不充分なブレーキング状態となることを回避することができる。従って、パーキングブレーキ19の自動作動を好適に行うことができる。
次に、第3実施形態に係る電動パーキングブレーキ装置3について説明する。第3実施形態に係る電動パーキングブレーキ装置3は、第1実施形態のものとほぼ同様であるが、パーキングブレーキ19の自動作動処理が一部異なっている。具体的に第2実施形態において、ECU11は、ブレーキペダルが規定位置に達していなくとも、一定の条件を満たせば、パーキングブレーキ19を自動作動させるようにしている。
図8は、第3実施形態に係る電動パーキングブレーキ装置3の詳細動作を示すフローチャートである。なお、図8に示すフローチャートは、マニュアル車に搭載される電動パーキングブレーキ装置3による処理を示すものである。また、同図に示すステップST20〜ST27の処理は、図5に示したステップST10〜ST17と同様であるため、説明を省略する。
第3実施形態において、ECU11は、ブレーキペダルの戻り量Bpxが所定の閾値Bp0を超えないと判断した場合(ST25:NO)、車輪速センサ57からの信号を読み込む。そして、ECU11は、車輪が回転しているか否か、すなわち車輪回転角が所定角θ0を超えるか否かを判断する(ST28)。
ここで、ステップST22においては、車両が停車状態であると判断されていることから、その後、ブレーキペダルが踏み込まれた状態から解除方向に戻されて規定位置に達していないにもかかわらず、車輪の回転が検出されたときには、車両に予期せぬ移動が生じていると判断できる。すなわち、運転者がブレーキペダルを踏んで車両が停車した後に、ブレーキペダルを踏み続けている又はブレーキペダルを戻しつつあるが僅かしか戻していない場合(規定位置に達していない場合)には、通常であれば車両は停車状態を保つ。しかし、車両が坂道に停車しているときには、車両の下降移動という予期せぬ移動が生じることがある。このため、ステップST28では、車輪の回転が検出されたか否かを判断することにより、予期せぬ移動が生じているか否かを判断するようにしている。なお、ECU11は、車輪の回転を検出する際に、車輪回転角が所定角θ0を超えるかを基準として判断することで、軽微な移動に関しては予期せぬ移動と判断しないようにしている。
そして、車輪回転角が所定角θ0を超えないと判断した場合(ST28:NO)、車両に予期せぬ移動が生じていないことから、図5に示す処理は終了する。一方、車輪回転角が所定角θ0を超えると判断した場合(ST28:YES)、車両に予期せぬ移動が生じていることから、ECU11は、戻り量Bpxが所定の閾値Bp0を超えたか否かによらず、パーキングブレーキ19を自動作動させる。すなわち、ECU11は、ステップST26においてパーキングブレーキ19を反強制的に自動作動させることによって、移動しつつある車両を停止させるようにしている。
次に、第3実施形態に係る電動パーキングブレーキ装置3の動作をタイミングチャートを参照して説明する。図9は、第3実施形態に係るブレーキペダルポジションBpx及び所定の閾値Bp0、並びにパーキングブレーキ19の自動作動の様子を示すタイミングチャートである。
図9に示すように、ECU11は、時刻T31において回転し始めた車輪の回転角が所定角θ0を超えたときに(時刻T33)、パーキングブレーキ19の自動作動を開始する。ここで、時刻T33の時点では、ブレーキペダルの戻り量Bpxが所定の閾値Bp0を超えていない。しかし、ECU11は、予期せぬ移動が発生していると判断し、ブレーキペダルの戻り量Bpxにかかわらず、パーキングブレーキ19の自動作動を開始させる。
ここで、第3実施形態においては以下のようにすることが望ましい。すなわち、予期せぬ移動は、車両が坂道などの傾斜面に停車したときに発生することから、傾斜角に応じてパーキングブレーキ19を自動作動させる際のブレーキ作動速度を制御することが望ましい。
具体的に説明すると、ECU11は、勾配センサ55から路面傾斜角の情報を入力する。そして、ECU11は、勾配センサ55により検出された傾斜角が大きくなるに従って、ブレーキ作動速度を速くする。
すなわち、図9に示すように通常であればパーキングブレーキ19の作動開始から完了までに時刻T34〜T36までの時間を要していたところを、作動速度を速くして当該時間より短い時刻T33〜T35までの時間でパーキングブレーキ19の作動を完了させるようにする。これにより、予期せぬ移動が生じやすい状況又は移動が生じたなら移動量が大きくなる状況において効果的なパーキングブレーキ19の自動作動を実現することとなる。
このようにして、第3実施形態に係る電動パーキングブレーキ装置3によれば、第1実施形態と同様に、パーキングブレーキ19の自動作動のタイミングについて適切化を図ることができる。
また、一層好適なタイミングでパーキングブレーキ19を自動作動させることができる。また、運転者はパーキングブレーキ19が自動作動されたことを認識することができ、電動パーキングブレーキ装置3がパーキングブレーキ19の自動解除の機能を備えていない場合であっても、発進を手間取ることがないようにすることができる。
さらに、第3実施形態によれば、車両が停車状態にあると判断した後に、ブレーキペダルが踏み込まれた状態から解除方向に戻されていない場合又は規定位置に達していない場合に、車輪の回転を検出したときには、パーキングブレーキ19を自動作動させている。ここで、車輪の回転を検出したときとは、車両の予期せぬ移動(例えば坂道等における下降移動)が生じた状態といえる。このため、車両の予期せぬ移動が検出されたときには、ブレーキペダルポジションBpxが所定の閾値Bp0に達したか否かにかかわらず、パーキングブレーキ19を自動作動させることとなる。これにより、坂道などで予期せぬ移動が発生したとしても、この移動を早期に防止することができる。従って、パーキングブレーキ19の自動作動を好適に行うことができる。
また、ブレーキペダルが踏み込まれた状態から解除方向に戻されていない場合又は規定位置に達していない場合に、パーキングブレーキ19を自動作動させるときには、車両が停車している路面の傾斜角が大きくなるに従って、パーキングブレーキ19を自動作動させる際のブレーキ作動速度を速くしている。このため、路面の傾斜角が大きく、一層予期せぬ移動が生じやすい場合や生じたとしたなら移動量が大きくなってしまう場合において、パーキングブレーキ19の自動作動を早期に完了させることとなる。これにより、予期せぬ移動の一層の防止、及び移動量の最小限化が可能となる。従って、パーキングブレーキ19の自動作動を好適に行うことができる。
次に、第4実施形態に係る電動パーキングブレーキ装置4について説明する。第4実施形態に係る電動パーキングブレーキ装置4は、第1実施形態のものとほぼ同様であるが、パーキングブレーキ19の自動作動処理が一部異なっている。具体的に第4実施形態において、ECU11は、主として車輪の回転に基づいてパーキングブレーキ19を自動作動させるようにし、ブレーキペダルが規定位置に達したか否かによる判断を行っていない。
図10は、第4実施形態に係る電動パーキングブレーキ装置4の詳細動作を示すフローチャートである。なお、図10に示すフローチャートは、マニュアル車に搭載される電動パーキングブレーキ装置4による処理を示すものである。また、同図に示すステップST30〜ST34,ST36,ST37の処理は、図5に示したステップST10〜ST14,ST16,ST17と同様であるため、説明を省略する。
第4実施形態において、ECU11は、クラッチペダルがオフ状態であると判断した場合(ST34:YES)、車輪速センサ57からの信号を読み込む。そして、ECU11は、車輪が回転しているか否か、すなわち車輪回転角が所定角θ0を超えるか否かを判断する(ST35)。
ここで、ステップST32において車両が停車状態であると判断されている。また、ステップST34においてクラッチペダルがオフ状態であると判断されている。さらに、ステップST30においてエンジンが作動状態であると判断されている。以上からすると、第1実施形態にて説明したのと同様に、シフトレバーはニュートラルポジションにあるといえる。
すなわち、ステップST35において、ECU11は、シフトレバーがニュートラルポジションにある状態で、車輪回転角が所定角θ0を超えるか否かを判断していることとなる。ここで、車輪回転角が所定角θ0を超える場合、シフトレバーがニュートラルポジションにあることから、運転者に走行の意思がないにもかかわらず、車両が移動しているといえる。すなわち、第3実施形と同様に、例えば、車両が坂道に停車して車両の下降移動が生じているといえる。
そして、ECU11は、車輪回転角が所定角θ0を超えないと判断した場合(ST28:NO)、車両に予期せぬ移動が生じていないことから、図5に示す処理を終了させることとする。一方、車輪回転角が所定角θ0を超えると判断した場合(ST28:YES)、車両に予期せぬ移動が生じていることから、ステップST36においてパーキングブレーキ19を自動作動させる。
ここで、図10の処理は以下のようにされていてもよい。すなわち、ECU11は、シフトポジション検出センサ45からの信号により、シフトレバーがニュートラルポジションにあることを判断するようにしてもよい。このように構成しても、上記と同様に、車輪回転角から車両に予期せぬ移動が生じているか否かを判断することができる。
図11は、第4実施形態に係るブレーキペダルポジションBpx及び所定の閾値Bp0、並びにパーキングブレーキ19の自動作動の様子を示すタイミングチャートである。なお、図11において車輪は図9に示した場合と逆方向に回転するものとする。
まず、車両が停車状態しているとする。そして、クラッチペダルがオフ状態であり、且つエンジンが作動状態であるとする。すなわち、シフトレバーがニュートラルポジションとなっているとする。このとき、ECU11は、シフトレバーがニュートラルポジションにあることから、車両を停車させたいという運転者の意思を確認する。
そして、車両が坂道等に停車しているなどの理由から、車輪が回転し始めるとする(時刻T41)。その後、車輪回転角が所定角θ0を超えたとする(時刻T42)。このとき、運転者に、走行の意思がないにもかかわらず、車両は移動している。すなわち、予期せぬ移動が生じている。このため、ECU11は、運転者の意思に沿うべく、パーキングブレーキ19の自動作動を開始させる(時刻T42)。これにより、好適なパーキングブレーキ19の自動作動を行うようにしている。その後、パーキングブレーキ19の自動作動が完了する(時刻T43)。
このようにして、第4実施形態に係る電動パーキングブレーキ装置4によれば、車両が停車状態にあると判断した後に、クラッチペダルが踏み込まれていないと判断し、エンジンが作動状態であると判断した場合に、車両の移動を検出したときには、パーキングブレーキ19を自動作動させている。
ここで、車両停車時において、クラッチペダルが踏み込まれておらず、且つエンジンの作動状態が検出されている場合、シフトレバーはニュートラルポジションにあるといえる。このため、シフトレバーがニュートラルポジションにある状態で、車両の移動を検出したときに、パーキングブレーキ19を自動作動させることとなる。
また、通常、運転者は、シフトレバーをニュートラルポジションにしている場合、車両を走行させる意思が無く、むしろ停車状態を保持する意思があるといえる。このため、運転者が車両を停車させたい状況において、車両の移動が検出されると、パーキングブレーキ19を自動作動させることとなる。
従って、パーキングブレーキ19の自動作動のタイミングについて適切化を図ることができる。
また、車両が停車状態にあると判断した後に、シフトレバーがニュートラルポジションにあると判断した場合に、車両の移動を検出したときには、パーキングブレーキ19を自動作動させている。ここで、一般的に運転者はシフトレバーをニュートラルポジションにしている場合、車両を走行させる意思が無く、むしろ停車状態を保持する意思があるといえる。このため、運転者が車両を停車させたい状況において、車両の移動が検出されると、パーキングブレーキ19を自動作動させることとなる。
従って、パーキングブレーキ19の自動作動のタイミングについて適切化を図ることができる。
また、パーキングブレーキ19を自動作動させる際に運転者に対し警報を行うので、運転者はパーキングブレーキ19が自動作動されたことを認識することができる。また、電動パーキングブレーキ装置4がパーキングブレーキ19の自動解除の機能を備えていない場合、運転者は、パーキングブレーキ19を自ら解除しなければならないことを知ることとなる。このため、車両発進に際してパーキングブレーキ19による作動に気が付かず、発進を手間取ることもない。
以上、実施形態に基づき本発明を説明したが、本発明は上記実施形態に限られるものではなく、各実施形態を組み合わせてもよいし、本発明の趣旨を逸脱しない範囲で、変更を加えてもよい。
1〜4…電動パーキングブレーキ装置
11…ECU(制御手段)
19…パーキングブレーキ
29…インジケータランプ(警報手段)
37…ブレーキポジションセンサ(ブレーキペダル操作検出センサ)
39…クラッチポジションセンサ(クラッチペダル操作検出センサ)
41…エンジン回転数検出センサ
45…シフトポジション検出センサ
55…勾配センサ(傾斜角検出センサ)
57…車輪速センサ(車輪速検出センサ)
11…ECU(制御手段)
19…パーキングブレーキ
29…インジケータランプ(警報手段)
37…ブレーキポジションセンサ(ブレーキペダル操作検出センサ)
39…クラッチポジションセンサ(クラッチペダル操作検出センサ)
41…エンジン回転数検出センサ
45…シフトポジション検出センサ
55…勾配センサ(傾斜角検出センサ)
57…車輪速センサ(車輪速検出センサ)
Claims (12)
- 車両のパーキングブレーキを自動作動させる電動パーキングブレーキ装置において、
車輪の回転を検出する車輪速検出センサと、
ブレーキペダルの操作を検出するブレーキペダル操作検出センサと、
前記車輪速検出センサからの信号により車両が停車状態にあると判断した後に、前記ブレーキペダル操作検出センサからの信号に基づいてブレーキペダルが踏み込まれた状態から解除方向に戻されつつ規定位置に達したと判断したときに、パーキングブレーキを自動作動させる制御手段と、
を備えることを特徴とする電動パーキングブレーキ装置。 - クラッチペダルの操作を検出するクラッチペダル操作検出センサと、
エンジンの回転数を検出するエンジン回転数検出センサと、を更に備え、
前記制御手段は、前記車輪速検出センサからの信号により車両が停車状態にあると判断した後に、前記ブレーキペダル操作検出センサからの信号に基づいてブレーキペダルが踏み込まれた状態から解除方向に戻されつつ規定位置に達したと判断した場合に、前記クラッチペダル操作検出センサからの信号に基づいてクラッチペダルが踏み込まれていないと判断し、前記エンジン回転数検出センサからの信号によりエンジンが作動状態であると判断したときに、パーキングブレーキを自動作動させる
ことを特徴とする請求項1に記載の電動パーキングブレーキ装置。 - シフトポジションの状態を検出するシフトポジション検出センサを更に備え、
前記制御手段は、前記車輪速検出センサからの信号により車両が停車状態にあると判断した後に、前記ブレーキペダル操作検出センサからの信号に基づいてブレーキペダルが踏み込まれた状態から解除方向に戻されつつ規定位置に達したと判断した場合、前記シフトポジション検出センサからの信号に基づいてシフトポジションがニュートラルポジションにあると判断したときに、パーキングブレーキを自動作動させる
ことを特徴とする請求項1に記載の電動パーキングブレーキ装置。 - 前記制御手段は、前記ブレーキペダル操作検出センサからの信号に基づいて検出されるブレーキペダルの戻し速度が速くなるに従って、前記規定位置をブレーキペダルの踏み込み側に変化させることを特徴とする請求項1〜請求項3のいずれか1項に記載の電動パーキングブレーキ装置。
- 前記制御手段は、前記ブレーキペダル操作検出センサからの信号に基づいて検出されるブレーキペダルの戻し速度が速くなるに従って、パーキングブレーキを自動作動させる際のブレーキ作動速度を速くさせることを特徴とする請求項1〜請求項4のいずれか1項に記載の電動パーキングブレーキ装置。
- 前記制御手段は、前記車輪速検出センサからの信号により車両が停車状態にあると判断した後に、前記ブレーキペダル操作検出センサからの信号に基づいて、ブレーキペダルが踏み込まれた状態から解除方向に戻されていないと判断した場合、又は規定位置に達していないと判断した場合に、前記車輪速検出センサからの信号により車両の移動を検出したときには、パーキングブレーキを自動作動させることを特徴とする請求項1〜請求項5のいずれか1項に記載の電動パーキングブレーキ装置。
- 車両が停車している路面の傾斜角を検出する傾斜角検出センサを更に備え、
前記制御手段は、ブレーキペダルが踏み込まれた状態から解除方向に戻されていないと判断した場合、又は規定位置に達していないと判断した場合にパーキングブレーキを自動作動させるときには、前記傾斜角検出センサにより検出された傾斜角が大きくなるに従って、パーキングブレーキを自動作動させる際のブレーキ作動速度を速くする
ことを特徴とする請求項6に記載の電動パーキングブレーキ装置。 - 車両のパーキングブレーキを自動作動させる電動パーキングブレーキ装置において、
車輪の回転を検出する車輪速検出センサと、
クラッチペダルの操作を検出するクラッチペダル操作検出センサと、
エンジンの回転数を検出するエンジン回転数検出センサと、
前記車輪速検出センサからの信号により車両が停車状態にあると判断した後に、前記クラッチペダル操作検出センサからの信号に基づいてクラッチペダルが踏み込まれていないと判断し、前記エンジン回転数検出センサからの信号によりエンジンが作動状態であると判断した場合に、前記車輪速検出センサからの信号により車両の移動を検出したときには、パーキングブレーキを自動作動させる制御手段と、
を備えることを特徴とする電動パーキングブレーキ装置。 - 車両のパーキングブレーキを自動作動させる電動パーキングブレーキ装置において、
車輪の回転を検出する車輪速検出センサと、
シフトポジションの状態を検出するシフトポジション検出センサと、
前記車輪速検出センサからの信号により車両が停車状態にあると判断した後に、前記シフトポジション検出センサからの信号に基づいてシフトポジションがニュートラルポジションにあると判断したときに、前記車輪速検出センサからの信号により車両の移動を検出したときには、パーキングブレーキを自動作動させる制御手段と、
を備えることを特徴とする電動パーキングブレーキ装置。 - パーキングブレーキを自動作動させる際に、運転者に対し警報を行う警報手段を更に備えることを特徴とする請求項1〜請求項9のいずれか1項に記載の電動パーキングブレーキ装置。
- 車両のパーキングブレーキを自動作動させる電動パーキングブレーキ装置において、
車両が停車状態にあると判断した後に、ブレーキペダルが踏み込まれた状態から解除方向に戻されつつ規定位置に達したときに、パーキングブレーキを自動作動させる
ことを特徴とする電動パーキングブレーキ装置。 - 車両のパーキングブレーキを自動作動させる電動パーキングブレーキ装置において、
車両が停車状態にあると判断した後に、クラッチペダルが踏み込まれていておらず且つエンジンが作動状態であると判断した場合に又はシフトポジションがニュートラルポジションにあると判断した場合に、車両の移動を検出したときには、パーキングブレーキを自動作動させる
ことを特徴とする電動パーキングブレーキ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004072857A JP2005255103A (ja) | 2004-03-15 | 2004-03-15 | 電動パーキングブレーキ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004072857A JP2005255103A (ja) | 2004-03-15 | 2004-03-15 | 電動パーキングブレーキ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005255103A true JP2005255103A (ja) | 2005-09-22 |
Family
ID=35081250
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004072857A Pending JP2005255103A (ja) | 2004-03-15 | 2004-03-15 | 電動パーキングブレーキ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005255103A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009144833A (ja) * | 2007-12-14 | 2009-07-02 | Toyota Motor Corp | 車両の制御装置および制御方法 |
| KR101298138B1 (ko) * | 2011-10-07 | 2013-08-26 | 주식회사 만도 | 차량용 제동 시스템 및 그 제어방법 |
| KR20150017360A (ko) * | 2012-05-26 | 2015-02-16 | 아우디 아게 | 차량용 주차 브레이크 시스템 |
| KR20170109006A (ko) * | 2015-03-02 | 2017-09-27 | 콘티넨탈 테베스 아게 운트 코. 오하게 | 차량 브레이크 시스템 제어기 및 방법 |
| KR20220029974A (ko) * | 2020-09-02 | 2022-03-10 | 현대자동차주식회사 | 엔진 오프시 전자식파킹브레이크의 비상 작동 시스템 및 방법 |
-
2004
- 2004-03-15 JP JP2004072857A patent/JP2005255103A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009144833A (ja) * | 2007-12-14 | 2009-07-02 | Toyota Motor Corp | 車両の制御装置および制御方法 |
| KR101298138B1 (ko) * | 2011-10-07 | 2013-08-26 | 주식회사 만도 | 차량용 제동 시스템 및 그 제어방법 |
| KR20150017360A (ko) * | 2012-05-26 | 2015-02-16 | 아우디 아게 | 차량용 주차 브레이크 시스템 |
| KR101940364B1 (ko) | 2012-05-26 | 2019-01-18 | 아우디 아게 | 차량용 주차 브레이크 시스템 |
| KR20170109006A (ko) * | 2015-03-02 | 2017-09-27 | 콘티넨탈 테베스 아게 운트 코. 오하게 | 차량 브레이크 시스템 제어기 및 방법 |
| KR101961582B1 (ko) | 2015-03-02 | 2019-03-22 | 콘티넨탈 테베스 아게 운트 코. 오하게 | 차량 브레이크 시스템 제어기 및 방법 |
| KR20220029974A (ko) * | 2020-09-02 | 2022-03-10 | 현대자동차주식회사 | 엔진 오프시 전자식파킹브레이크의 비상 작동 시스템 및 방법 |
| KR102854955B1 (ko) * | 2020-09-02 | 2025-09-04 | 현대자동차주식회사 | 엔진 오프시 전자식파킹브레이크의 비상 작동 시스템 및 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4179388B1 (ja) | 車両用制御装置 | |
| JP5234304B2 (ja) | 自動車の電動パーキング・ブレーキ制御システム及びその制御方法 | |
| JP3945387B2 (ja) | 電動ブレーキ,その制御装置及び電動ブレーキの制御方法 | |
| US4629043A (en) | Electric parking brake system for a vehicle | |
| JP5895907B2 (ja) | 車両用シフト制御装置 | |
| US10549756B2 (en) | Automatic brake hold release directly to vehicle creep | |
| CN110461662B (zh) | 车辆用控制装置 | |
| JP2009275818A (ja) | シフトバイワイヤ制御システム | |
| US11198420B2 (en) | System and method for operating a motor vehicle with an electric parking brake | |
| JP2007170546A (ja) | 車両制御システム | |
| JP2005255103A (ja) | 電動パーキングブレーキ装置 | |
| JP4415706B2 (ja) | 電動パーキングブレーキ装置 | |
| JP5062431B2 (ja) | ブレーキ装置 | |
| RU2711883C1 (ru) | Устройство электрического стояночного тормоза | |
| JPS6337729B2 (ja) | ||
| JP7459647B2 (ja) | エンジン制御装置 | |
| JP2005247194A (ja) | 電動パーキングブレーキ装置 | |
| JP2005263025A (ja) | 電動パーキングブレーキ装置 | |
| JP2005255102A (ja) | 電動パーキングブレーキ装置 | |
| JP2005254997A (ja) | 電動パーキングブレーキ装置 | |
| JP2005271887A (ja) | 電動パーキングブレーキ装置 | |
| JP4164096B2 (ja) | 車両制御システム | |
| JP4811382B2 (ja) | パーキングブレーキ装置 | |
| JP4330569B2 (ja) | 電動パーキングブレーキ装置 | |
| JP2005255038A (ja) | 電動パーキングブレーキ装置 |