JP2005257630A - 脈動発生装置および振動測定評価システム - Google Patents
脈動発生装置および振動測定評価システム Download PDFInfo
- Publication number
- JP2005257630A JP2005257630A JP2004072907A JP2004072907A JP2005257630A JP 2005257630 A JP2005257630 A JP 2005257630A JP 2004072907 A JP2004072907 A JP 2004072907A JP 2004072907 A JP2004072907 A JP 2004072907A JP 2005257630 A JP2005257630 A JP 2005257630A
- Authority
- JP
- Japan
- Prior art keywords
- force
- vibration
- link
- rod
- pulsation generator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Testing Of Devices, Machine Parts, Or Other Structures Thereof (AREA)
Abstract
【課題】 対象物に所望の脈動をもたらすことが可能な脈動発生装置、および、脈動させられた対象物の振動に起因する振動特性を的確に測定、評価することのできる振動測定評価システムの開発が望まれている。
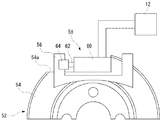
【解決手段】 本発明に基づく脈動発生装置は、ディスクローター54を押圧する押圧部58と、押圧部58に接続されたマスターシリンダー72およびマスターロッド74と、サーボモータ76によって回転駆動される偏芯カム78と、偏芯カム78によって揺動される動的リンク80および静的リンク82と、静的リンク82に取り付けられたプレロードスプリング98とを備えている。サーボモータ76が回転すると偏芯カム78、動的リンク80、および静的リンク82によってマスターロッド74には変動する押圧力が加えられる。またプレロードスプリング98によってマスターロッド74には略一定の押圧力を加える。
【選択図】 図5
【解決手段】 本発明に基づく脈動発生装置は、ディスクローター54を押圧する押圧部58と、押圧部58に接続されたマスターシリンダー72およびマスターロッド74と、サーボモータ76によって回転駆動される偏芯カム78と、偏芯カム78によって揺動される動的リンク80および静的リンク82と、静的リンク82に取り付けられたプレロードスプリング98とを備えている。サーボモータ76が回転すると偏芯カム78、動的リンク80、および静的リンク82によってマスターロッド74には変動する押圧力が加えられる。またプレロードスプリング98によってマスターロッド74には略一定の押圧力を加える。
【選択図】 図5
Description
本発明は、脈動発生装置、および車両に発生している振動を測定、評価する振動測定評価システムに関する。
ブレーキ装置を作動させて車両を制動させる際に、ブレーキ装置にガタガタという振動が発生することがある。この振動現象はジャダーと呼ばれている。このジャダーは、車両ドライバーに違和感を与える一要因であるため、抑制、排除されることが望ましい。
例えばディスクブレーキ装置の場合には、取り付け誤差等のためにロータが偏摩耗し、このロータに比較的厚い部分と比較的薄い部分とが生じてしまうことがある。このような場合にディスクブレーキ装置を作動させると、「制動力が比較的強く働く状態」と「制動力が比較的弱く働く状態」とが高速で繰り返されて、ジャダーが発生してしまうことがある。またドラムブレーキ装置の場合にも、取り付け誤差等のためにドラムが偏磨耗し、そのような状態でドラムブレーキ装置を作動させると「制動力が比較的強く働く状態」と「制動力が比較的弱く働く状態」とが高速で繰り返されて、ジャダーが発生してしまうことがある。
このようなジャダーを模擬発生させたり解析したりする手法として、従来から様々な方法が提案されている。例えば、高応答ダイナモを用いてタイヤ接地面を加振することによりブレーキ装置を振動させて、ステアリング振動、ペダル振動、あるいは車体振動を計測し、その計測結果を解析する手法が提案されている(例えば特許文献1参照)。
ジャダーを模擬発生、解析する様々な手法が従来から提案されているが、ジャダーに関する正確なデータを得るために、実際の車両走行時に発生するジャダーをより忠実に再現することができる具体的な手法の提案が望まれている。
例えば、実際のジャダーは、ロータやドラムなどのブレーキ装置自体において発生する。しかしながら、タイヤ接地面を加振してブレーキ装置に模擬的なジャダーを発生させるような上述の従来技術では、タイヤで発生させた振動がブレーキ装置に伝わることによってジャダーが発生されるので、ジャダーの発生源はブレーキ装置ではなくタイヤとなる。従って、この従来技術を用いた場合には、ロータ、ドラムなどのブレーキ装置とタイヤとの間の振動伝達経路に存在するサスペンション等の影響成分が、ブレーキ装置に模擬発生させるジャダーに含まれうることとなる。そのようにして模擬発生されたジャダーは、実際のジャダーとは異なる特性を示すことがあり、その原因を厳密に特定することが難しい場合も考えられる。
また、実際のジャダーは、ブレーキ装置を作動させた際の「ロータやドラムに加えられるトルクの変動」の影響だけではなく「減速加速度によってもたらされる力」の影響も受けて発生する。従って、「ロータやドラムに加えられるトルクの変動」だけでなく「減速加速度によってもたらされる力」についても模擬的に再現することができる具体的な手法の提案が望まれている。
また、ジャダーの模擬発生およびその解析は、簡単に短時間で行われることが望ましいので、そのようなジャダーの模擬発生、解析を行う装置は、軽量、小型で容易に持ち運ぶことができるものであることが好ましい。しかしながら、タイヤを加振させる装置は一般的に大型なものになるため、上述の従来技術によってブレーキ装置にジャダーを発生させる労力は多大なものとなり、ジャダーを発生させる装置を容易に搬送することができるように構成することは難しかった。
本発明は上述の事情を鑑みてなされたものであり、その目的は、対象物に所望の脈動をもたらすことが可能な脈動発生装置、および、脈動させられた対象物の振動に起因する振動特性を的確に測定、評価することのできる振動測定評価システムを提供することにある。
本発明のある態様は脈動発生装置に関する。この脈動発生装置は、対象物に対して一定方向の力を継続的に加える静的押圧手段と、前記対象物に対して変動する力を加える動的押圧手段と、を備える。当該脈動発生装置によれば、静的押圧手段によって発生される力と動的押圧手段によって発生される力とを適宜調整して対象物に加えることが可能である。これにより、静的な力成分と動的な力成分という異なる力成分を対象物に加えることができる。
前記静的押圧手段は、弾性力により前記対象物に対して略一定の力を継続的に加える弾性体を有していてもよい。この場合、対象物には弾性体によって略一定の力が加えられるので、所望の一定方向の力を対象物に対して継続的に加えることができる。弾性体は、例えば、ゴム等のように材質的に優れた弾性を示すものや、バネ等のように構造的に優れた弾性を示すものが用いられうる。弾性体を利用することで、対象物に対して簡易に略一定の力を加えることができる。
前記静的押圧手段は、前記対象物に対して略一定の力を継続的に加えるサーボ機構を有していてもよい。この場合、サーボ機構によって対象物に対し継続的に力が加えられるので、この力の厳密な調整を比較的簡単に行うことできる。
前記静的押圧手段は、前記対象物に対して略一定の力を継続的に加えるリンク機構を有していてもよい。この場合、リンク機構という比較的シンプルな構成によって、対象物に対し略一定の力を継続的に加えることができる。ここでいうリンク機構は、リンクを有するもの全般を含む。
前記動的押圧手段は、回転方向の力を生み出すモータと、前記モータによって生み出される回転方向の力を直線方向の力に変換して、この直線方向の力を前記対象物に対し加えるカム−リンク機構と、を有していてもよい。この場合、モータおよびカム−リンク機構という比較的シンプルな構成によって、変動する力を対象物に対し加えることができる。ここでいうカム−リンク機構は、カムおよびリンクを有するもの全般を含む。
前記動的押圧手段は、前記対象物に対して変動する力を加えるサーボ機構を有していてもよい。この場合、サーボ機構によって対象物に対し変動する力が加えられるので、この力の厳密な調整を比較的簡単に行うことができる。
前記動的押圧手段は、前記対象物に対して変動する力を加えるリンク機構を有していていもよい。この場合、リンク機構という比較的シンプルな構成によって、対象物に対し変動する力が加えられる。ここでいうリンク機構は、リンクを有するもの全般を含む。
前記対象物は、加えられる力に応じた油圧を発生する油圧システムであってもよい。この場合、油圧システムは、静的押圧手段や動的押圧手段によって加えられる力に応じた油圧を発生させる。
前記油圧システムは、加えられる力に応じて発生する油圧によって駆動されるアクチュエータを有していてもよい。この場合、アクチュエータは、静的押圧手段および動的押圧手段により油圧システムに加えられる力に応じて駆動され、他の対象を動かして振動等を生じさせることができる。
本発明の別の態様は振動測定評価システムに関する。この振動測定評価システムは、脈動力を発生させる脈動発生装置と、前記脈動発生装置に接続され、前記脈動発生装置において発生される脈動力が付与されるブレーキ装置と脈動力が付与される前記ブレーキ装置の振動、または当該ブレーキ装置に接続される車両の所定位置に伝わってくる振動を測定する振動測定手段と、前記振動測定手段の測定結果を評価する振動評価手段と、を備え、前記脈動発生装置は、加えられる力に応じた脈動力を発生する脈動力システムと、前記脈動力システムに対して一定方向の力を継続的に加える静的押圧手段と、前記脈動力システムに対して変動する力を加える動的押圧手段と、を有する。当該振動測定評価システムによれば、静的押圧手段および動的押圧手段からの力に応じて脈動力システムで発生した脈動力に起因する振動を、適切に測定して評価することができる。
なお、上述した各要素を適宜組み合わせたものも、本件特許出願によって特許による保護を求める発明の範囲に含まれうる。
本発明の脈動発生装置によれば、「静的押圧手段により発生される力」および「動的押圧手段により発生される力」を対象物に加えることができ、対象物に対して所望の脈動をもたらすことができる。
また本発明の振動測定評価システムによれば、「静的押圧手段によって脈動力システムに加えられる力」および「動的押圧手段によって脈動力システムに加えられる力」に応じた脈動力が付与されるブレーキ装置の振動に起因する各種の振動特性を、適切に測定し評価することができる。
以下、図面を参照して本発明の各実施の形態について説明する。
(第1の実施の形態)
図1は、振動測定評価システムの全体構成を示す図である。振動測定評価システムは、車両10と、車両10に接続された油圧駆動部12および振動センサ14と、振動センサ14に接続された振動評価部16と、を備えている。
図1は、振動測定評価システムの全体構成を示す図である。振動測定評価システムは、車両10と、車両10に接続された油圧駆動部12および振動センサ14と、振動センサ14に接続された振動評価部16と、を備えている。
車両10は、車両本体22と、車両本体22の前後左右に設けられた車輪24と、を有している。車両本体22には、ステアリング26やフロア28などの各種構成部品および機器類が設けられている。図示されていないが、エンジン等の駆動源、クラッチ、トランスミッション、デフ等の駆動伝達系、サスペンションなどのように、通常の車両走行を実現する為に必要とされる各種構成部品および機器類が車両10には搭載されていることが望ましい。車両10に搭載される各種構成部品および機器類は、実際に車両走行時に使用されるものが用いられている。
振動センサ14は、車両10のステアリング26およびフロア28に取り付けられており、伝わってくる振動の振幅、波長、周波数等の特性を測定する。
振動評価部16は、各振動センサ14から送られてくる振動に関する測定結果に基づいて所定の解析処理や生データの表示処理等の各種処理を行い、振動センサ14の測定結果を評価する。
図2は、左前の車輪24の周辺の外観構成を示す図である。各車輪24は、タイヤ30及びホイール32を有している。各車輪24のタイヤ30は、フローティング治具34によって支持され接地面から僅かに浮いた状態となっている。フローティング治具34は、支持しているタイヤ30の前後左右方向の並進を抑制するとともに、回転方向およびステア方向へタイヤ30が自由に動くことができるように、タイヤ30を保持している。これにより、タイヤ30が並進してしまうことを防いだ状態で、車両走行時の接地面からの抵抗や拘束力を再現することが可能である。
図3(a)〜図3(c)は、フローティング治具34の具体的な構成を示す図である。図3(a)はフローティング治具34の正面図であり、図3(b)はフローティング治具34の右側側面図であり、図3(c)はフローティング治具34の上面図である。フローティング治具34は、四角形状を有し水平方向に拡がるベースプレート36と、ベースプレート36の四つの各コーナーに設けられ鉛直上方向に延びる支柱38と、タイヤ30の前後方向に隣接する支柱38の上端部同士を連結する二つのステイ40と、各ステイ40から二本ずつ降ろされた四本のワイヤ42と、ワイヤ42を介してステイ40に連結され実際にタイヤ30を載置して支持する支持プレート44と、を備えている。支持プレート44は、ワイヤ42を介してステイ40にブランコのように吊り下げられており、載置されたタイヤ30が回転方向およびステア方向へ自由に動くことができるように、タイヤ30を保持している。支持プレート44の表面にはローレット加工等が施されており、載置されたタイヤ30の前後左右方向の並進を抑制している。
支持プレート44のうちタイヤ30が載置される面とは反対側の面には、ベースプレート36に対しボルトを介して固定された荷重用ブロック46が当接するようにして設けられている。ベースプレート36上には、ボルトを介して固定された支持ブロック48が設けられている。なお、荷重用ブロック46および支持ブロック48は支持プレート44と一体的に形成することも可能である。支持ブロック48は荷重ロッド50を支持しており、荷重ロッド50の一部に形成されたネジ部と、支持ブロック48に形成されたネジ孔部とが螺合連結されている。
荷重ロッド50は、支持ブロック48に対し回転させられて荷重用ブロック46から遠ざかる方向に移動すると、荷重用ブロック46との接触が解放されるようになっている。一方、荷重ロッド50は、支持ブロック48に対し回転させられて荷重用ブロック46に近づく方向に移動すると、荷重用ブロック46と接触、押圧するようになっている。荷重ロッド50と荷重用ブロック46との接触、押圧状態を適宜調整することにより、支持プレート44が接地面から抵抗力を受けている状態が模擬的に実現され、ブレーキ装置の操作の違いによる車両10に対する拘束力の変化を模擬的に再現することができる。
図4は、左前の車輪24の内部構成の一部を示す図である。各車輪24のホイール32の内側にはディスクブレーキ装置52が設けられている。このディスクブレーキ装置52は、タイヤ30とともに回転するディスクローター54と、回転するディスクローター54に押し当てられて制動動作を行うパッドを支持するためのキャリパー56と、を有している。
左前の車輪24に設けられたディスクブレーキ装置52では、ディスクローター54の一部に切り欠き部54aが形成されており、キャリパー56にはパッドは取り付けられていない。そして、左前の車輪24のディスクローター54の切り欠き部54aとキャリパー56との間には押圧部58が設けられている。
押圧部58は、ボルトによってディスクローター54に固定されている油圧式のホイールシリンダー60およびホイールロッド62を有している。ホイールシリンダー60の一端部は、ディスクローター54の切り欠き部54aの起立面に対し当接した状態で固定されている。ホイールシリンダー60の他端部からはホイールロッド62の一端が突出している。ホイールシリンダー60から突出しているホイールロッド62は、平板64を介してキャリパー56に押し当てられている。平板64は、パッドが固定されるべき位置に配置されている。
このような構成を有する押圧部58では、ホイールシリンダー60内の油圧が変化すると、ホイールロッド62がホイールシリンダー60から飛び出したり引っ込んだりする。このホイールロッド62の変動によって、ホイールロッド62がキャリパー56を押圧し、また、キャリパー56に対するホイールロッド62の押圧力の反力によって、ホイールシリンダー60がディスクローター54を押圧する。
図5は、油圧駆動部12の具体的な構成が示された図である。油圧駆動部12は、押圧部58のホイールシリンダー60にホース70を介して連結されたマスターシリンダー72およびマスターロッド74と、サーボモータ76と、サーボモータ76に取り付けられた偏芯カム78と、偏芯カム78が連結された動的リンク80と、動的リンク80とマスターロッド74との間に設けられた静的リンク82と、サーボモータ76に接続された振動制御部84と、を備えている。
ホイールシリンダー60、ホース70、およびマスターシリンダー72の内部には所定の液体が封入されている。静的リンク82からマスターロッド74に押圧力が加えられると、加えられる押圧力に応じてマスターシリンダー72内の液体には油圧が発生し、ホース70およびホイールシリンダー60内の液体を介してホイールロッド62にその油圧が伝えられる。
サーボモータ76は、振動制御部84により制御されて、所定の回転力を生み出して偏芯カム78に伝える。
偏芯カム78は、動的リンク80の長手方向に所定の長さをもって形成されたリンク孔86にはめ込まれており、リンク孔86に沿って可動に設けられている。この偏芯カム78は、サーボモータ76から伝えられる回転力によって回転しながら、動的リンク80を動かす。偏芯カム78にはカム送りネジ88が取り付けられており、このカム送りネジ88を調整することにより偏芯カム78を押してリンク孔86に沿って所定量移動させることができる。なお、偏芯カム78は、動的リンク80との接触回転を良好に保つ構造を有することが好ましく、例えばベアリングを有する構造とすることもできる可能である。
動的リンク80は、その上端部において動的リンク支持部90により支持されており、その下方部には偏芯カム78が取り付けられている。偏芯カム78がサーボモータ76によって回転させられて所定の軌跡を描きながら回転移動すると、動的リンク80は、偏芯カム78に押されて動的リンク支持部90を中心に揺動する。なお、カム送りネジ88によって偏芯カム78と動的リンク支持部90との距離を調整することにより、動的リンク80の揺動振幅量を調節することが可能である。また、動的リンク80は、揺動方向のうち静的リンク82側に突出した静的リンク押圧部80aを有しており、動的リンク80の揺動に応じて静的リンク押圧部80aが静的リンク82を押圧するようになっている。
サーボモータ76、偏芯カム78、および動的リンク80は基板92に取り付けられており、基板92を移動させることによってサーボモータ76、偏芯カム78、および動的リンク80を一緒に移動させることができる。基板92の側面のうち静的リンク82とは反対側に位置する側面には、基板送りネジ94が当接するようにして設けられている。この基板送りネジ94のハンドルを回して調整することによって、静的リンク82側へ基板92を移動させることができる。基板送りネジ94によって基板92と静的リンク82との間のクリアランスを調節することにより、動的リンク80の静的リンク押圧部80aによる静的リンク82の押圧状態を調整することができる。
静的リンク82は、下端部において静的リンク支持部96により支持されており、静的リンク支持部96を中心に揺動可能に設けられている。また、静的リンク82は、揺動方向のうちマスターロッド74側に突出したロッド押圧部82aを有しており、静的リンク82の揺動に応じてロッド押圧部82aがマスターロッド74を押圧するようになっている。静的リンク82の上端部は、所定のバネ定数を有するプレロードスプリング98とスプリング調整ネジ100とを介して固定部102に連結されている。
プレロードスプリング98は、所定のバネ定数を有する弾性体であり、このバネ定数は比較的小さいほうが好ましい。バネ定数が比較的小さいプレロードスプリング98は、静的リンク82をマスターロッド74側に引っ張ることによって、マスターロッド74に対して略一定の静的な押圧力をマスターシリンダー72側に継続的に加えるように設けられている。スプリング調整ネジ100は、その回転量に応じて、プレロードスプリング98による静的リンク82の引っ張り量を調節する。従って、静的リンク82のロッド押圧部82aによるマスターロッド74に対する静的な押圧力は、スプリング調整ネジ100によって調整可能となっている。
振動制御部84は、サーボモータ76の回転数を制御するサーボドライバーとして機能し、サーボモータ76の回転数を決定する任意の周波数を入力可能となっている。
上述のような構成を有する油圧駆動部12は、簡単に持ち運びできる程度の小型のハンディボックスに収容されている。本実施の形態のハンディボックス104は、60cm×35cm×45cm程度の大きさを有している。
上述のような構成を有する本実施の形態の振動測定評価システムでは、脈動力を発生させる脈動発生装置が押圧部58および油圧駆動部12を含んで構成されている。また、マスターシリンダー72およびマスターロッド74と、ホース70と、ホイールシリンダー60およびホイールロッド62と、を含んで油圧システムが構成されている。
次に本実施の形態の作用について説明する。
実際の車両走行時において、ディスクローター54の肉厚が大きい部分にパッドが押し当てられると制動力が比較的大きくなり、ディスクローター54とキャリパー56との間には大きな力が働く。本実施の形態では、そのような状態が「比較的大きな油圧を受けたホイールロッド62がホイールシリンダー60から突出し、キャリパー56がホイールロッド62によって強く押圧されるとともに、ディスクローター54がホイールシリンダー60によって強く押圧されること」によって再現される。また、実際の車両走行時において、ディスクローター54の肉厚が小さい部分にパッドが押し当てられると、制動力が比較的小さくなり、ディスクローター54とキャリパー56との間にはやや小さな力が働く。本実施の形態では、そのような状態が「比較的小さな油圧を受けたホイールロッド62がホイールシリンダー60から突出し、キャリパー56がホイールロッド62によって弱く押圧されるとともに、ディスクローター54がホイールシリンダー60によって弱く押圧されること」によって再現される。
従って、本実施の形態では、油圧駆動部12が押圧部58に伝える油圧の大きさを周期的に変化させて、ディスクローター54あるいはキャリパー56に加えられる押圧力を高速で変動させることにより、ディスクブレーキ装置52に振動を生じさせている。これにより「ディスクローター54に作用するトルク変動に基づくジャダー」を模擬的に発生させることができる。具体的には、以下のようにして行われている。
まず、サーボモータ76が振動制御部84により制御されて回転駆動させられる。サーボモータ76が回転すると偏芯カム78は所定の軌跡を描きながら回転移動し、この偏芯カム78の移動に伴って動的リンク80は揺動する。動的リンク80が揺動すると、静的リンク82は動的リンク80の静的リンク押圧部80aにより押圧されて揺動し、静的リンク82のロッド押圧部82aはマスターロッド74を押圧する。従って、サーボモータ76により生み出される回転方向の力が、偏芯カム78、動的リンク80、および静的リンク82により直線方向の力に変換されて、変動する押圧力としてマスターロッド74に対し加えられることとなる。
マスターロッド74は、静的リンク82によって加えられる押圧力に応じて、マスターシリンダー72の内部に封入された液体を押圧して油圧を発生し、この油圧は、ホース70およびホイールシリンダー60の内部に封入された液体を介してホイールロッド62に伝えられる。ホイールシリンダー60およびホイールロッド62は、マスターロッド74に加えられる押圧力に応じて発生する油圧により変動し、ディスクローター54およびキャリパー56を押圧するアクチュエータとして機能する。すなわち、ホイールシリンダー60の内部に封入された液体を介してホイールロッド62に油圧が伝えられると、ホイールロッド62はホイールシリンダー60から突出し平板64を介してキャリパー56を押圧する。また、キャリパー56がホイールロッド62によって押圧される際の反力により、ホイールシリンダー60がディスクローター54を押圧する。
この時、動的リンク80の揺動状態および静的リンク82の揺動状態に応じて、静的リンク82からマスターロッド74に加えられる押圧力は変化し、ホイールシリンダー60およびホイールロッド62によるディスクローター54およびキャリパー56に対する押圧力も変化する。従って、ホイールシリンダー60からディスクローター54に加えられる押圧力の周期は、動的リンク80の揺動および静的リンク82の揺動をコントロールするサーボモータ76の回転周期によって決定される。このため、振動制御部84によりサーボモータ76の回転周期を制御することによって、マスターロッド74に対して加えられる押圧力を周期的に変動させることが可能である。マスターロッド74に加えられる押圧力が変動するとマスターシリンダー72、ホース70、ホイールシリンダー60内の液体の油圧も変化して、ホイールロッド62には脈動力が伝えられる。そして、ホイールロッド62から脈動力が付与されるディスクローター54は脈動して振動が生じ、ジャダーが模擬発生される。
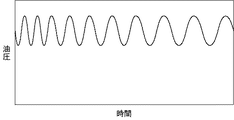
実際の車両走行時にディスクブレーキ装置52を作動させると、ディスクローター54はパッドが押し当てられて徐々に回転速度が低下する。従って、実際の車両制動時に、偏摩耗したディスクローター54の厚い部分および薄い部分がパッドによって押圧される周期は、徐々に長くなる。そこで本実施の形態では、実際の車両走行時に発生するジャダーをより忠実に再現するために、図6に示すような周期で、押圧部58に伝えられる油圧を変化させている。
図6は、押圧部58に伝えられる油圧の状態を示す図である。押圧部58に伝えられる油圧の周期は、実際の車両制動時のタイヤ30の回転周期に応じて決定することが好ましい。一般にタイヤ30の回転周期Tは、回転周期T=(タイヤの有効転がり半径×2π)/車速、で求められる。従って、例えば、タイヤ30の有効転がり半径が0.25mである車両10において、車速が200km/hの場合の回転周期Tは約0.0283s(約35Hz)となり、車速が30km/hの場合の回転周期Tは約0.1885s(約5Hz)となる。従って、実際の車両制動時の車速が200km/h〜30km/hの間で変化するような場合に発生するジャダーを、本実施の形態の脈動発生装置によって模擬的に発生させる場合には、振動制御部84における油圧駆動部12の制御周波数を約35Hz〜約5Hzの間で徐々に変化させることにより、より忠実にジャダーを模擬発生させることができる。
図6に示す押圧部58に伝えられる油圧の変動は、実際の車両10の偏摩耗したディスクローター54の肉厚変動によって生じる周期的な制動力変化に対応するものである。図6では一例としてサイン波によって押圧部58に伝えられる油圧を変化させているが、これに限定されるものではなく、模擬する実際のディスクローター54の肉厚状態等に応じて三角波や方形波などに代表される任意の波形を選択することも可能である。なお、特定の周期、周波数において発生するジャダーを再現する場合には、押圧部58に伝えられる油圧を一定の周期で変化させることも可能である。
また、押圧部58に伝えられる油圧の大きさは、カム送りネジ88及び基板送りネジ94を調整することによって変えることが可能である。例えば、基板送りネジ94を調整して動的リンク80と静的リンク82との距離を調節することにより、押圧部58に伝えられる油圧の絶対値を調整することが可能である。また、カム送りネジ88を調整して偏芯カム78と動的リンク80との距離を調節することにより、押圧部58に伝えられる油圧の最大値と最小値とを調整することが可能である。
上述のようにしてディスクローター54を脈動させて振動を生じさせることにより、ディスクローター54に作用するトルク変動に基づくジャダーを模擬的に発生させることができる。実際の車両走行時には、車両制動時の減速加速度によってディスクローター54には略一定の力が一定方向に継続的に作用した状態で、ジャダーが発生している。このため、本実施の形態では、更に以下のようにして「減速加速度によってもたらされる力」の影響が加味されたジャダーを模擬的に発生させることが可能である。
スプリング調整ネジ100によってプレロードスプリング98の引っ張り量を調節し、静的リンク82のロッド押圧部82aによるマスターロッド74の押圧力を調整することによって、マスターロッド74に予荷重を加える。これによりマスターロッド74には、プレロードスプリング98の弾性力によってもたらされる略一定の押圧力が継続的に一定方向に加えられることとなる。そして、ホイールロッド62には、マスターロッド74に加えられた予荷重に応じた油圧力が伝えられて、ディスクローター54およびキャリパー56がマスターシリンダー72およびマスターロッド74によって押圧されることとなる。
なお、模擬発生させる「減速加速度によってもたらされる力」に応じてスプリング調整ネジ100を調整することにより、静的リンク82によってマスターロッド74に加えられる予荷重が調節されている。このような状態で、上述した「トルク変動に基づくジャダー」を模擬的に発生させることにより、「減速加速度によってもたらされる力」の影響を加味したジャダーを模擬発生させることができる。
ところで、実際の車両走行時にブレーキ装置を作動させると、タイヤ30は、接地路面から後方に押される力を受ける。この接地路面から受ける力は、ブレーキ装置の作動状態によって変化する。例えば、車両10を急激に減速させようとしてブレーキペダルを強く踏んで急ブレーキをかける場合には、タイヤ30は接地路面から非常に大きな力を受ける。一方、車両10を比較的緩やかに減速させようとしてブレーキペダルを弱く踏んだ場合には、タイヤ30は接地路面から比較的弱い力を受ける。従って、本実施の形態においても、より忠実にジャダーを模擬発生させるために、接地面からタイヤ30が受ける力を任意に変化させることが必要である。
本実施の形態では、図3に示す荷重ロッド50を回転させて荷重用ブロック46との接触状態を調整することによって、接地面からタイヤ30が受ける力を任意に変化させている。荷重ロッド50と荷重用ブロック46とを非接触状態に保てば、支持プレート44は拘束力を受けずにフリーな状態となる。また、荷重ロッド50と荷重用ブロック46とを接触させて相互に押圧された状態とした場合には、支持プレート44が接地面から所定の抵抗力を受けている状態を模擬的に発生させて、走行路面からタイヤ30が受ける力を実現することができる。
上述のようにして各装置類によってディスクローター54に発生した振動は、車両10の各所に伝わっていく。そのような振動のうちステアリング26およびフロア28に伝達される振動は、振動センサ14によって波長等の振動特性が測定され、振動評価部16に送られる。そして、振動評価部16では、送られてきた振動に関する測定結果に対して所定の処理等が施される。このようにして、「ディスクローター54で発生した振動と、ステアリング26やフロア28にもたらされる振動との関係」が解析、評価され、例えばステアリング26に作用する加速度、スイープ加振特性、振動伝達関数、等のデータを得ることも可能である。また、ブレーキ振動現象に関する他の物理モデルとの比較検討を行うことも可能である。
以上説明したように本実施の形態によれば、実際の走行車両で発生するジャダーを、非走行状態の車両10において容易に模擬発生させることができる。このため、本実施の形態ではジャダー発生部位に容易に接近することができ、ジャダー発生時のディスクローター54やキャリパー56、或いはそれら周辺に存在するサスペンション等の挙動を観察したり、ジャダー発生部位に直接触れたりすることも可能である。また、外乱となりうる天候、路面状態、タイヤ30の摩耗等の状態、あるいはエンジンの振動などを排除してジャダーを解析することができるので、より的確にジャダーの解析を行うことができる。
特に、本実施の形態では、ブレーキ装置を作動させた際の「ディスクローター54に加えられるトルクの変動」の影響だけではなく「減速加速度によってもたらされる力」の影響を考慮したジャダーを模擬的に発生させることができるので、実際の車両走行時に発生するジャダーをより忠実に再現することが可能である。
また、実際の車両制動時のジャダー発生源となりうるディスクローター54に対して直接的にジャダーを模擬発生させているので、タイヤ30等を介して外部からジャダーを発生させるような場合に比べて、実際の現象に近いジャダーを模擬発生させることができる。
また、油圧駆動部12は、小型のハンディボックス104に収容することができる程度の大きさで構成されるので、可搬性に優れている。このため、車両10を動かす必要があった従来の脈動発生装置に比べると、小型の油圧駆動部12を自由に移動させて車両10に取り付けることができるので、押圧部58および油圧駆動部12の車両10に対する取り付けを、簡単かつ短時間で行うことができる。
また、本実施の形態の脈動発生装置では、振動制御部84によってサーボモータ76の駆動周期を調整したり、基板送りネジ94やカム送りネジ88の送り量を調整したり、荷重ロッド50と荷重用ブロック46との接触状態を調整したりすることによって、所望のジャダーを簡単に模擬発生させることが可能である。従って本実施の形態では、従来行われていた偏摩耗したディスクローター54をジャダーパターン毎に作製したり交換したり等といった作業が不要となり、ジャダーを簡単、低コストで発生させることができる。
また、上述のようにして実際のジャダーを忠実に再現することによって、このジャダーがステアリング26等の車両各所にもたらす振動についても、より正確なデータを得ることができる。これにより、例えばCAE等による解析精度は向上し、ジャダーによる車両ドライバーの違和感を効果的に抑制した車両設計等が可能となる。
なお、車両10には実際の走行時に必要とされる各種機器類が搭載されているので、それらの各種機器類を作動させた状態で、脈動発生装置によりジャダーを発生させることも可能である。この場合には、ブレーキ装置で発生させたジャダーだけでなく各種機器類で発生する振動が車両10の各所に及ぼす影響についても測定、解析することが可能である。
(第2の実施の形態)
本実施の形態において、上述の第1の実施の形態と同一部分には同一符号を付して詳細な説明は省略する。
本実施の形態において、上述の第1の実施の形態と同一部分には同一符号を付して詳細な説明は省略する。
図7は、本実施の形態の油圧駆動部12の具体的な構成を示す模式図である。本実施の形態の油圧駆動部12は、押圧部58のホイールシリンダー60にホース70を介して連結されたマスターシリンダー72およびマスターロッド74と、サーボモータ76と、サーボモータ76に取り付けられた偏芯カム78と、偏芯カム78に隣接するようにして取り付けられた単リンク110と、サーボモータ76に接続された振動制御部84と、を備えている。
偏芯カム78は、単リンク110のうちマスターロッド74とは反対側の下方側面に隣接するようにして設けられている。この偏芯カム78は、サーボモータ76から伝えられる回転力によって回転しながら、単リンク110を動かす。偏芯カム78には、カム送りネジ88が取り付けられており、このカム送りネジ88を適宜調整することにより偏芯カム78を鉛直方向へ押して移動させることができる。
単リンク110は、鉛直方向に延びる上方部110aおよび下方部110bと、上方部110aの下端と下方部110bの上端とを水平方向に連結する中間部110cと、を有し、各部が一体的に形成された単一構造を持つ。単リンク110の上方部110aの上端部には単リンク110を支持する単リンク支持部112が設けられており、単リンク110の下方部110bの下端部にはプレロードスプリング98が取り付けられている。単リンク110の上方部110aの中間には、マスターロッド74の一端が取り付けられており、マスターロッド74の取り付け位置の下方では偏芯カム78が隣接している。偏芯カム78がサーボモータ76によって回転させられると、単リンク110は、単リンク支持部112を中心に揺動する。なお、カム送りネジ88によって偏芯カム78と単リンク支持部112との距離を調整することにより、単リンク110の揺動振幅量を調節することが可能である。
サーボモータ76、偏芯カム78、および単リンク110は基板92に取り付けられており、基板92を移動させることによってサーボモータ76、偏芯カム78、および単リンク110を一緒に移動させることができるようになっている。基板92には、基板92をマスターシリンダー72側へ移動させることのできる基板送りネジ94が取り付けられている。基板送りネジ94にはハンドルが取り付けられており、このハンドルを回して基板92とマスターシリンダー72との間のクリアランスを調節し、単リンク110によるマスターロッド74の押圧状態を調整することができる。
プレロードスプリング98は、単リンク110をマスターシリンダー72側に引っ張ることによって、マスターロッド74に対して略一定の静的な押圧力をマスターシリンダー72側に継続的に加えるように設けられている。プレロードスプリング98の端部のうち単リンク110に取り付けられている端部とは逆側の端部には、スプリング調整ハンドル114が取り付けられている。スプリング調整ハンドル114は、そのハンドル回転量に応じて、プレロードスプリング98による静的リンク82の引っ張り量を調節することができ、これにより単リンク110によるマスターロッド74の静的な押圧力を調整することができる。
上述のような構成を有する油圧駆動部12は、簡単に持ち運びできる程度の小型のハンディボックス104に収容されている。
他の構成は、図1乃至図6に示す第1の実施の形態と略同一である。
本実施の形態の油圧駆動部12も、第1の実施の形態と同様にマスターロッド74を押圧し、マスターシリンダー72、ホース70、およびホイールシリンダー60の内部に封入された液体を介して、変動する油圧を押圧部58に伝える。
すなわち、振動制御部84がサーボモータ76を回転駆動させて偏芯カム78を回転移動させると、単リンク110は、偏芯カム78の移動に伴って単リンク支持部112を中心に揺動して、マスターロッド74を押圧する。従って、サーボモータ76により生み出される回転方向の力が、偏芯カム78および単リンク110によって直線方向の力に変換されて、マスターロッド74に伝えられることとなる。
マスターロッド74は、単リンク110から伝えられる力に応じて、マスターシリンダー72、ホース70およびホイールシリンダー60の内部に封入された液体を押圧し、ホイールロッド62には油圧が伝えられる。このようにして伝えられる油圧に応じて、ホイールロッド62が平板64を介してキャリパー56を押圧するとともに、ホイールシリンダー60がディスクローター54を押圧する。
この時、単リンク110の揺動状態に応じて、マスターロッド74に加えられる押圧力は変化し、ホイールシリンダー60およびホイールロッド62によるディスクローター54およびキャリパー56に対する押圧力も変化する。このため、振動制御部84によりサーボモータ76の回転周期を制御して、マスターロッド74に対して加えられる押圧力を周期的に変動させることによって、ホイールシリンダー60内の液体の油圧は周期的に変化し、ホイールロッド62には脈動力が伝えられる。そして、ホイールロッド62から脈動力が付与されるディスクローター54は脈動して振動が生じ、トルク変動に基づくジャダーが模擬発生されることとなる。
また、スプリング調整ハンドル114によってプレロードスプリング98の引っ張り量を調節し、単リンク110によるマスターロッド74の押圧力を調整することによって、マスターロッド74に予荷重が加えられる。これによりマスターロッド74には、プレロードスプリング98の弾性力によってもたらされる略一定の押圧力が一定方向に継続的に加えられることとなる。そして、ホイールロッド62には、プレロードスプリング98からマスターロッド74に加えられる押圧力に応じた油圧力が伝えられて、ディスクローター54およびキャリパー56がマスターシリンダー72およびマスターロッド74によって押圧される。これにより、「減速加速度によってもたらされる力」の影響が加味されたジャダーを模擬的に発生させることができる。
そして、上述のようにしてディスクローター54に発生させられた振動は車両10の各所に伝わっていき、ステアリング26およびフロア28に伝達される振動は、波長等の振動特性が振動センサ14によって測定され、振動評価部16に送られる。そして、振動評価部16では、送られてきた振動に関する測定結果に対して所定の処理等が施され、「ディスクローター54で発生した振動と、ステアリング26やフロア28にもたらされる振動との関係」が解析、評価される。
以上説明したように本実施の形態においても、「ディスクローター54に加えられるトルクの変動」の影響だけではなく「減速加速度によってもたらされる力」の影響を考慮したジャダーを、非走行状態の車両10において容易に模擬発生させることができる。
特に本実施の形態では、偏芯カム78および単リンク110という比較的単純な構造によって、サーボモータ76の回転力をマスターシリンダー72を押圧する直線方向の力に変換してディスクローター54に振動を発生させることができるので、装置全体の小型化、低コスト化を更に効果的に図ることが可能である。
(第3の実施の形態)
本実施の形態において、上述の第1の実施の形態と同一部分には同一符号を付して詳細な説明は省略する。
本実施の形態において、上述の第1の実施の形態と同一部分には同一符号を付して詳細な説明は省略する。
図8は、本実施の形態の油圧駆動部12の具体的な構成を示す模式図である。本実施の形態の油圧駆動部12は、ホイールシリンダー60およびホース70内の液体の油圧を自動的に目標値に追従させるサーボ機構を含んで構成されている。このサーボ機構は、押圧部58のホイールシリンダー60にホース70を介して連結されたサーボ弁120と、サーボ弁120に配管122を介して接続された空冷式の油圧源124と、サーボ弁120および油圧源124に接続された振動制御部84と、を有している。
サーボ弁120は、振動制御部84により制御されて、油圧源124とホース70との間で行われる所定の液体の供給、回収をコントロールして、ホース70内の液体に発生させる油圧を調整することができる。
油圧源124は、振動制御部84により制御されて、所定の液体をサーボ弁120を介してホース70内に供給することができ、また、サーボ弁120を介してホース70内の液体を回収することができる。
振動制御部84は、サーボ弁120および油圧源124を電子的に制御して、ホース70と油圧源124との間における所定の液体の供給あるいは回収をコントロールすることによりホース及びホイールシリンダー内の油圧を調整することができる。具体的には、サーボ弁120によってホイールシリンダー60内の液体に所定の油圧を生じさせる際に必要とされる「所定の液体の加速度や圧力」等の設定情報を振動制御部84に適宜入力しておくことによって、振動制御部84は入力された設定情報に応じてサーボ弁120および油圧源124を制御する。
他の構成は、図1乃至図6に示す第1の実施の形態と略同一である。
本実施の形態の油圧駆動部12も、第1の実施の形態と同様に、ホース70およびホイールシリンダー60内に封入された液体を介して、変動する油圧を押圧部58に伝える。
すなわち、油圧源124およびサーボ弁120は、振動制御部84により制御されて、ホース70内の液体に油圧を発生させて、ホイールシリンダー60およびホイールロッド62にその油圧を伝える。その時、ホース70内の液体の流量等を調整することによりホース70内の液体にもたらされる力を周期的に変化させることによって、ホイールシリンダー60内の液体の油圧は周期的に変化し、ホイールロッド62には脈動力が伝えられる。そして、ホイールロッド62から脈動力が付与されるディスクローター54は脈動して振動が生じ、トルク変動に基づくジャダーが模擬発生される。
また、振動制御部84は油圧源124およびサーボ弁120を制御して、略一定の大きさで一定方向に継続的に作用する油圧をホース70およびホイールシリンダー60内の液体に発生させることによって、ディスクブレーキ装置52に模擬発生させるジャダーに「減速加速度によってもたらされる力」の影響を加味することができる。
なお、本実施の形態においても、図6に示すような油圧がホース70およびホイールシリンダー60内の液体に発生するように、油圧源124およびサーボ弁120が振動制御部84によって制御されている。
そして、上述のようにしてディスクローター54に発生させられた振動は車両10の各所に伝わっていき、ステアリング26およびフロア28に伝達される振動は、波長等の振動特性が振動センサ14によって測定され、振動評価部16に送られる。そして、振動評価部16では、送られてきた振動に関する測定結果に対して所定の処理等が施され、「ディスクローター54で発生した振動と、ステアリング26やフロア28にもたらされる振動との関係」が解析、評価される。
以上説明したように本実施の形態では、ホース70、ホイールシリンダー60、およびホイールロッド62によって構成される油圧システムに対して、一定方向の力を継続的に加える静的押圧手段および変動する力を加える動的押圧手段が、サーボ弁120、油圧源124、および振動制御部84を含むサーボ機構によって実現されている。このようなサーボ機構を用いることによって、油圧システムに発生させる油圧の厳密な調整を比較的簡単に行うことができ、所望の振動を精度良くブレーキ装置に発生させることができる。
本発明は、上述の各実施の形態に限定されるものではなく、当業者の知識に基づいて各種の設計変更等の変形を加えることも可能であり、そのような変形が加えられた実施の形態も本発明の範囲に含まれうるものである。
例えば、上述の各実施の形態では、カム−リンク機構あるいはサーボ機構によって、油圧システムに加えられる力が調整されているが、他の装置等を用いることも可能である。例えば、図9に示すような油圧駆動部12を用いて、油圧システムに加えられる力を調整することも可能である。
図9は、油圧駆動部12の一変形例を示す模式図である。この油圧駆動部12は、押圧部58のホイールシリンダー60にホース70を介して連結されたマスターシリンダー72およびマスターロッド74と、マスターロッド74の一端が回転自在に取り付けられた直線状リンク130と、直線状リンク130の下端部に取り付けられた所定のリンク押圧部132と、リンク押圧部132に接続された振動制御部84と、を有している。
直線状リンク130は、上端部において直線状リンク支持部134によって支持されており、直線状リンク130は直線状リンク支持部134を中心に揺動可能に設けられている。また、直線状リンク130のうち、マスターロッド74の取り付け位置とリンク押圧部132の取り付け位置との間には、プレロードスプリング98が取り付けられている。
リンク押圧部132は、振動制御部84により制御されて、マスターロッド74の変動方向へ直線状リンク130を押圧するものである。このリンク押圧部132は、直線状リンク130を介してマスターロッド74を適切に押圧することができる任意の手段を用いることが可能であり、その駆動方式も油圧型や導電型など任意の方式を利用することができる。例えば、電磁リンクやピエゾ素子等の機器類を用いてリンク押圧部132を構成することも可能である。
プレロードスプリング98は、直線状リンク130をマスターシリンダー72側に押圧して、マスターロッド74に対して略一定の大きさの押圧力を一定方向に継続的に加えるように設けられている。プレロードスプリング98の端部のうち直線状リンク130に取り付けられている端部とは逆側の端部には、プレロードスプリング98による直線状リンク130の押圧力を調整可能なスプリング調整ネジ100が取り付けられている。上述のような構成を有する油圧駆動部12は、簡単に持ち運びできる程度の小型のハンディボックス104に収容されている。
図9に示すようなリンク機構を含む油圧駆動部12を用いた場合にも、上述の第1の実施の形態と同様にマスターロッド74が押圧され、マスターシリンダー72、ホース70、およびホイールシリンダー60内に封入された液体を介して、押圧部58に対して変動する油圧力を加えることができる。すなわち、振動制御部84により制御されたリンク押圧部132によって直線状リンク130が揺動させられ、この直線状リンク130の揺動に応じてマスターロッド74は押圧される。そして、マスターロッド74は、マスターシリンダー72、ホース70およびホイールシリンダー60の内部に封入された液体を押圧し、ホイールロッド62には油圧力が伝えられる。このようにして伝えられる油圧力に応じて、ホイールロッド62が平板64を介してキャリパー56を押圧するとともに、ホイールシリンダー60がディスクローター54を押圧する。この時、リンク押圧部132による直線状リンク130に対する押圧力が変動すると、マスターロッド74に対して加えられる押圧力も変動する。このため、ディスクローター54は脈動して振動が生じ、トルク変動に基づくジャダーが模擬発生される。また、プレロードスプリング98による直線状リンク130に対する押圧力を調整して、マスターロッド74に対し略一定の押圧力を継続的に加えることにより、「減速加速度によってもたらされる力」の影響が加味されたジャダーを模擬的に発生させることができる。
また、上述の各実施の形態では押圧部58をホイールシリンダー60およびホイールロッド62によって構成した例について説明したが、ブレーキ装置に対して適切な脈動力を付与することができる他の装置や機構を用いることも可能である。
また、上述の各実施の形態ではブレーキ装置としてディスクブレーキ装置52が用いられている場合について説明したが、他のブレーキ装置に対しても本発明を適用することが可能である。例えばドラムブレーキ装置が用いられる場合には、ディスクローター54の代わりにドラムを設けて、キャリパー56の代わりにブレーキシューを支持するバッキングプレートを設けることもできる。この場合、ドラムとバッキングプレートの間に押圧部58を設置し、この押圧部58によってドラムを脈動させて振動を生じさせることにより、ジャダーを模擬発生させることが可能である。
また、ブレーキ装置を脈動させる押圧部58の動作状態を検出する押圧状態検出手段を設けて、この押圧状態検出手段の検出結果を振動制御部84にフィードバックするようにしてもよい。例えば上述の第1の実施の形態において、歪みゲージをホイールロッド62に貼り付けるとともに、この歪みゲージの検出結果が振動制御部84に送られるようにして、振動制御部84が歪みゲージの検出結果をサーボモータ76の制御に反映するように設けてもよい。そのような場合には、所望のジャダーをより正確に模擬発生させることができる。
また、上述の各実施の形態では、車両10が具備する車輪24のうち左前の車輪24にのみ押圧部58および油圧駆動部12が取り付けられている場合について説明したが、他の車輪24に押圧部58および油圧駆動部12を取り付けることも可能である。例えば、押圧部58および油圧駆動部12を、任意の1つの車輪24にのみ取り付けたり、任意の複数の車輪24に取り付けたりすることも可能である。この場合、各車輪24に取り付けられているブレーキ装置に発生させるジャダーは、各車輪24毎に異なるものとすることもできるし、同一のものとすることもできる。
また、上述の各実施の形態では、プレロードスプリング98やサーボ機構によって「減速加速度によってもたらされる力」を加味した振動をディスクローター54に生じさせていたが、他の手段を用いることも可能である。例えば、バネ状のプレロードスプリング98の代わりにゴム等の他の弾性体を用いることも可能である。なお、この場合、動的押圧手段によって油圧システムに対し変動する力が加えられても、マスターロッド74等を含む油圧シリンダーに対して略一定の力を一定方向に継続的に加えることができるように、比較的小さい弾性定数を有する弾性体を用いることが好ましい。
また、上述の各実施の形態では、車両10が具備する車輪24のうち左前の車輪24にのみ押圧部58および油圧駆動部12が取り付けられている場合について説明したが、他の車輪24に押圧部58および油圧駆動部12を取り付けることも可能である。例えば、押圧部58および油圧駆動部12を、任意の1つの車輪24にのみ取り付けたり、任意の複数の車輪24に取り付けたりすることも可能である。この場合、各車輪24に取り付けられているブレーキ装置に発生させるジャダーは、各車輪24毎に異なるものとすることもできるし、同一のものとすることもできる。
また、押圧部58および油圧駆動部12が複数の車輪24に取り付けられる場合には、各車輪24のブレーキ装置のタイプを変えることも可能である。例えば、車両10が具備する車輪24のすべてに押圧部58および油圧駆動部12が取り付けられる場合に、前輪のブレーキ装置をディスクブレーキ装置52として、後輪のブレーキ装置をドラムブレーキ装置とすることも可能である。
また、振動センサ14は、模擬発生されるジャダーによってもたらされる振動を測定したい任意の箇所に設置可能であり、例えば、シート、シフトレバー、ボディーなどのように搭乗者が直接触れることのできる箇所や、ギアボックス、タイロッド、ロアアーム、ナックルアームなどのように搭乗者が通常運転時には触れない箇所にも設置可能である。
また、振動センサ14以外のセンサ類を車両10の各所に設置することも可能であり、例えば、温度センサ等を配置してジャダーが発生時の温度等の環境データを測定し、解析、評価することも可能である。
また、押圧部58の配置方向は、ブレーキ装置に所望のジャダーを発生させることができる限りにおいて、任意の配置とすることができる。従って、ディスクブレーキ装置52のキャリパー56の位置やドラムブレーキ装置のバッキングプレートの位置に対応した方向に、押圧部58を配置することができる。そして、ディスクローター54やドラムの接線方向に振動を発生させることができるように押圧部58を配置することが好ましい。
また、上述の各実施の形態ではフローティング治具34を使用する場合について説明したが、タイヤ30を回転方向およびステア方向へ自由に動かすことができるようにする必要がない場合には、フローティング治具34を用いなくてもよい。例えば、実際の車両走行時に、車両が非常に低速で走行している場合には、タイヤが設置路面から受ける抵抗力および拘束力は大きくなる。従って、車両が低速走行している場合に発生するジャダーを模擬発生させる場合には、タイヤを回転方向およびステア方向へ自由に動かすことができるようにする必要がないので、フローティング治具が不要となる場合がある。このため、ジャダーを模擬発生させる車両速度に応じて、フローティング治具を使用したり使用しなかったりするようにしてもよい。
10 車両、 12 油圧駆動部、 14 振動センサ、 16 振動評価部、 34 フローティング治具、 54 ディスクローター、 56 キャリパー、 58 押圧部、 60 ホイールシリンダー、 62 ホイールロッド、 72 マスターシリンダー、 74 マスターロッド、 76 サーボモータ、78 偏芯カム、 80 動的リンク、 82 静的リンク、 84 振動制御部、 98 プレロードスプリング、110 単リンク、 120 サーボ弁、 124 油圧源、 130 直線状リンク、 132 リンク押圧部
Claims (10)
- 対象物に対して一定方向の力を継続的に加える静的押圧手段と、
前記対象物に対して変動する力を加える動的押圧手段と、
を備えることを特徴とする脈動発生装置。 - 前記静的押圧手段は、弾性力により前記対象物に対して略一定の力を継続的に加える弾性体を有することを特徴とする請求項1に記載の脈動発生装置。
- 前記静的押圧手段は、前記対象物に対して略一定の力を継続的に加えるサーボ機構を有することを特徴とする請求項1に記載の脈動発生装置。
- 前記静的押圧手段は、前記対象物に対して略一定の力を継続的に加えるリンク機構を有することを特徴とする請求項1に記載の脈動発生装置。
- 前記動的押圧手段は、
回転方向の力を生み出すモータと、
前記モータによって生み出される回転方向の力を直線方向の力に変換して、この直線方向の力を前記対象物に対し加えるカム−リンク機構と、
を有する特徴とする請求項1乃至4のいずれかに記載の脈動発生装置。 - 前記動的押圧手段は、前記対象物に対して変動する力を加えるサーボ機構を有することを特徴とする請求項1乃至4のいずれかに記載の脈動発生装置。
- 前記動的押圧手段は、前記対象物に対して変動する力を加えるリンク機構を有することを特徴とする請求項1乃至4のいずれかに記載の脈動発生装置。
- 前記対象物は、加えられる力に応じた油圧を発生する油圧システムであることを特徴とする請求項1乃至7のいずれかに記載の脈動発生装置。
- 前記油圧システムは、加えられる力に応じて発生する油圧によって駆動されるアクチュエータを有することを特徴とする請求項8に記載の脈動発生装置。
- 脈動力を発生させる脈動発生装置と、
前記脈動発生装置に接続され、前記脈動発生装置において発生される脈動力が付与されるブレーキ装置と
脈動力が付与される前記ブレーキ装置の振動、または当該ブレーキ装置に接続される車両の所定位置に伝わってくる振動を測定する振動測定手段と、
前記振動測定手段の測定結果を評価する振動評価手段と、を備え、
前記脈動発生装置は、加えられる力に応じた脈動力を発生する脈動力システムと、前記脈動力システムに対して一定方向の力を継続的に加える静的押圧手段と、前記脈動力システムに対して変動する力を加える動的押圧手段と、を有することを特徴とする振動測定評価システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004072907A JP2005257630A (ja) | 2004-03-15 | 2004-03-15 | 脈動発生装置および振動測定評価システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004072907A JP2005257630A (ja) | 2004-03-15 | 2004-03-15 | 脈動発生装置および振動測定評価システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005257630A true JP2005257630A (ja) | 2005-09-22 |
Family
ID=35083475
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004072907A Pending JP2005257630A (ja) | 2004-03-15 | 2004-03-15 | 脈動発生装置および振動測定評価システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005257630A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100498264C (zh) * | 2006-05-31 | 2009-06-10 | 江苏万工科技集团有限公司 | 开口凸轮的振动测量装置 |
| CN107192523A (zh) * | 2016-03-15 | 2017-09-22 | 北京强度环境研究所 | 输送管路动特性试验激振力加载平衡装置 |
| KR101844299B1 (ko) | 2016-07-25 | 2018-04-02 | 서울대학교산학협력단 | 가진 범위가 증대된 압력 섭동 발생기 |
| JP2019015566A (ja) * | 2017-07-05 | 2019-01-31 | 日本精工株式会社 | 偏芯回転部品用試験装置 |
| WO2019234788A1 (ja) * | 2018-06-04 | 2019-12-12 | 日産自動車株式会社 | 異常検出装置及び異常検出方法 |
| CN115406608A (zh) * | 2022-09-23 | 2022-11-29 | 山东联工检测设备有限公司 | 一种振幅连续可调的耐久试验台 |
-
2004
- 2004-03-15 JP JP2004072907A patent/JP2005257630A/ja active Pending
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100498264C (zh) * | 2006-05-31 | 2009-06-10 | 江苏万工科技集团有限公司 | 开口凸轮的振动测量装置 |
| CN107192523A (zh) * | 2016-03-15 | 2017-09-22 | 北京强度环境研究所 | 输送管路动特性试验激振力加载平衡装置 |
| CN107192523B (zh) * | 2016-03-15 | 2023-06-20 | 北京强度环境研究所 | 输送管路动特性试验激振力加载平衡装置 |
| KR101844299B1 (ko) | 2016-07-25 | 2018-04-02 | 서울대학교산학협력단 | 가진 범위가 증대된 압력 섭동 발생기 |
| JP2019015566A (ja) * | 2017-07-05 | 2019-01-31 | 日本精工株式会社 | 偏芯回転部品用試験装置 |
| WO2019234788A1 (ja) * | 2018-06-04 | 2019-12-12 | 日産自動車株式会社 | 異常検出装置及び異常検出方法 |
| CN112236662A (zh) * | 2018-06-04 | 2021-01-15 | 日产自动车株式会社 | 异常检测装置和异常检测方法 |
| JPWO2019234788A1 (ja) * | 2018-06-04 | 2021-06-24 | 日産自動車株式会社 | 異常検出装置及び異常検出方法 |
| JP7010374B2 (ja) | 2018-06-04 | 2022-01-26 | 日産自動車株式会社 | 異常検出装置及び異常検出方法 |
| US11827222B2 (en) | 2018-06-04 | 2023-11-28 | Nissan Motor Co., Ltd. | Abnormality detection apparatus and abnormality detection method |
| CN115406608A (zh) * | 2022-09-23 | 2022-11-29 | 山东联工检测设备有限公司 | 一种振幅连续可调的耐久试验台 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4465506B2 (ja) | タイヤhilシミュレータ | |
| JP4698468B2 (ja) | 鉄道車両ブレーキ性能試験機、及び鉄道車両ブレーキ性能試験方法 | |
| KR102205387B1 (ko) | 철도 차량용 브레이크 시스템에서 제동 토크의 결정 방법 및 그 장치 | |
| Schwarz et al. | Modeling and control of an electromechanical disk brake | |
| JP4266818B2 (ja) | 操縦安定性の実時間評価用タイヤ試験機 | |
| JP5406917B2 (ja) | 平坦ではない路面上を走行する車両の騒音/快適性能を予測判定する方法 | |
| KR101300363B1 (ko) | 휠 림에서의 요구되는 하중을 얻는 방법 및 휠 림 테스트용 테스트 장치 | |
| JP4014264B2 (ja) | タイヤのトレツド剛性の決定装置及び関連の方法 | |
| WO2007119750A1 (ja) | タイヤの制動特性試験装置 | |
| JP6420149B2 (ja) | 動的本体力を測定および評価するためのテストシステム | |
| CN107077205A (zh) | 具有改进的力觉再现的力觉接口 | |
| JPH10260114A (ja) | 転動疲労試験装置 | |
| US20050120783A1 (en) | 6-Axis road simulator test system | |
| US20180043865A1 (en) | Braking system for a vehicle with an adjustable brake pedal assembly | |
| JP2010532479A (ja) | タイヤトレッドの摩耗試験装置に用いる水平位置制御 | |
| US20150040679A1 (en) | Active resistance dynamometer for wheel testing | |
| JP3808959B2 (ja) | リム及びタイヤを有する車輪を障害物の上を通す試験の試験装置 | |
| JP2005257630A (ja) | 脈動発生装置および振動測定評価システム | |
| JP5384222B2 (ja) | 加振装置 | |
| JP4225195B2 (ja) | ジャダー発生装置およびジャダー測定システム | |
| KR200461460Y1 (ko) | 타이어 횡방향 마찰력 측정장치 | |
| EP1825245B1 (en) | 6-axis road simulator test system | |
| JP7060495B2 (ja) | 車両動作シミュレーション方法および車両動作シミュレーションシステム | |
| JP7326937B2 (ja) | タイヤ試験システム | |
| JP2000019077A (ja) | 車両用シミュレーション装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060601 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080401 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081105 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090407 |