本発明は、動力出力装置およびこれを搭載する自動車に関し、詳しくは、駆動軸に動力を出力する動力出力装置およびこれを搭載する自動車に関する。
従来、この種の動力出力装置としては、シングルピニオンのプラネタリギヤのキャリアにエンジンのクランクシャフトを接続すると共にサンギヤに第1モータを接続し、リングギヤに車軸に接続された駆動軸と第2モータとを接続したものが提案されている(例えば、特許文献1参照)。この装置では、効率のよい運転ポイントで運転されたエンジンからの動力をプラネタリギヤと二つのモータによりトルク変換して駆動軸に出力することにより、装置全体の効率を向上させている。
また、他の動力出力装置としては、シングルピニオンのプラネタリギヤのサンギヤにエンジンのクランクシャフトを接続すると共にリングギヤに第1モータを接続し、キャリアに車軸に接続された駆動軸と第2モータとを接続したものが提案されている(例えば、特許文献2参照)。この装置では、エンジンからの動力をプラネタリギヤと二つのモータによりトルク変換して駆動軸に出力すると共に電動走行をも可能としている。
特開平9−308012号公報(図1)
特開昭48−49115号公報(第1図)
しかしながら、上述の前者の動力出力装置では、駆動軸に要求される動力が高回転低トルクの場合には、エンジンと第1モータとから出力された動力の一部を第2モータによって発電して第1モータに供給するという動力−電力−動力のエネルギ循環(いわゆる動力循環)が生じ、装置全体のエネルギ効率を低下させる場合が生じる。一方、後者の動力出力装置では、駆動軸に要求される動力が低回転高トルクの場合には、エンジンからの高トルクを第1モータによってバランスをとる必要から、第1モータが大型化してしまう。
本発明の動力出力装置およびこれを搭載する自動車は、内燃機関と二つの電動機とを有する装置やこれを搭載する自動車におけるエネルギ効率を向上させることを目的の一つとする。また、本発明の動力出力装置およびこれを搭載する自動車は、小型の電動機を用いることにより装置の小型化を図ることを目的の一つとする。
本発明の動力出力装置およびこれを搭載する自動車は、上述の目的の少なくとも一部を達成するために以下の手段を採った。
本発明の動力出力装置は、
駆動軸に動力を出力する動力出力装置であって、
内燃機関と、
発電可能な第1電動機と
発電可能な第2電動機と、
前記駆動軸に接続された第1軸と前記内燃機関の出力軸に接続された第2軸と前記第1電動機に接続された第3軸と前記第2電動機に接続された第4軸を含む多数軸を有し、前記第3軸と前記第4軸のうちの一方の軸を回転停止状態としたときに前記内燃機関からの動力をトルクを増幅させて前記駆動軸に出力するよう該一方の軸と前記第1軸と前記第2軸とを連結すると共に前記第3軸と前記第4軸のうちの他方の軸を前記第1軸または第2軸に連結するトルク増幅連結と、前記第3軸と前記第4軸のうちの一方の軸を回転停止状態としたときに前記内燃機関からの動力をトルクを減少させて前記駆動軸に出力するよう該一方の軸と前記第1軸と前記第2軸とを連結すると共に前記第3軸と前記第4軸のうちの他方の軸を前記第1軸または前記第2軸に連結するトルク減少連結とを含む複数の連結を切り替えて前記内燃機関からの動力の少なくとも一部を前記駆動軸に出力可能な連結切替手段と、
を備えることを要旨とする。
この本発明の動力出力装置では、第1電動機に接続された第3軸と第2電動機に接続された第4軸のうちの一方の軸を回転停止状態としたときに内燃機関からの動力をトルクを増幅させて駆動軸に出力するようこの一方の軸と駆動軸に接続された第1軸と内燃機関の出力軸に接続された第2軸とを連結すると共に第3軸と第4軸のうちの他方の軸を第1軸か第2軸に連結するトルク増幅連結と、第3軸と第4軸のうちの一方の軸を回転停止状態としたときに内燃機関からの動力をトルクを減少させて駆動軸に出力するようこの一方の軸と第1軸と第2軸とを連結すると共に第3軸と第4軸のうちの他方の軸を第1軸か第2軸に連結するトルク減少連結とを含む複数の連結を切り替えて内燃機関からの動力の少なくとも一部を駆動軸に出力することができる。即ち、トルク増幅連結とトルク減少連結とを含む複数の連結を切り替えて内燃機関からの動力をトルク変換して駆動軸に出力することができるのである。したがって、駆動軸に必要な動力に応じて連結を切り替えることにより、装置全体のエネルギ効率を向上させることができる。また、このように連結を切り替えることにより、第1電動機や第2電動機の小型化を図ることができ、これにより装置の小型化を図ることができる。
こうした本発明の動力出力装置において、前記連結切替手段は、前記複数の連結の一つとして少なくとも前記第1軸と前記第2軸とが一体回転するよう該第1軸と該第2軸とを連結する直接連結を含む手段であるものとすることもできる。こうすれば、内燃機関の出力軸と駆動軸とを一体回転させることができる。したがって、駆動軸に必要な動力が内燃機関を効率よく運転することができる動力であるときにこの直接連結を用いることにより、装置全体のエネルギ効率を向上させることができる。この態様の本発明の動力出力装置において、前記直接連結は、前記第3軸と前記第4軸の少なくとも一方についても前記第1軸および前記第2軸と一体回転するよう連結する連結であるものとすることもできる。こうすれば、直接連結時に第1電動機や第2電動機により動力を出力したり発電したりすることができる。この場合、第3軸と第4軸のうちの一方だけを第1軸および第2軸と一体回転するよう連結するものとしてもよいし、第3軸と第4軸の双方を第1軸および第2軸と一体回転するよう連結するものとしてもよい。
また、本発明の動力出力装置において、前記連結切替手段は、前記複数の連結の一つとして前記第3軸と前記第4軸のうちの少なくとも一方の軸と前記第1軸とを所定の回転比をもって連結すると共に前記第2軸を自由回転可能に連結する電動連結を含む手段であるものとすることもできる。こうすれば、内燃機関を停止した状態で第1電動機や第2電動機からの動力だけを駆動軸に出力することができる。この場合、第3軸と第4軸のうちの一方だけを第1軸に連結するものとしてもよいし、第3軸と第4軸の双方を第1軸に連結するものとしてもよい。第3軸と第4軸の双方を第1軸に連結する場合、第3軸と第1軸との回転数比と第4軸と第1軸との回転数比は、同一のものとしてもよいし、異なるものとしてもよい。
さらに、本発明の動力出力装置において、前記連結切替手段は、前記複数の連結の一つとして前記第1軸と前記第2軸と前記第3軸と前記第4軸の4軸のうちいずれか2軸の回転数に基づいて残余の2軸を回転させるよう該4軸を連結する4要素連結を含む手段であるものとすることもできる。こうすれば、トルク増幅連結やトルク減少連結に加えて4要素連結を選択することができる。したがって、これらをエネルギ効率の観点で切り替えることにより、装置全体のエネルギ効率をより向上させることができる。
あるいは、本発明の動力出力装置において、前記連結切替手段は、前記第2軸と前記第4軸とが一体の手段であるものとすることもできる。こうすれば、トルク増幅連結とトルク減少連結との切り替えを3軸により実現することができる。この結果、装置の小型化を図ることができる。
本発明の動力出力装置において、前記連結切替手段は、共線図において順に並ぶ第1回転要素と第2回転要素と第3回転要素とを有し該第1回転要素が前記第3軸に接続されると共に該第3回転要素が前記第4軸に接続された遊星歯車と、前記第1軸と前記第2回転要素との接続および接続の解除を行なう第1接続解除手段と、前記第1軸と前記第3回転要素との接続および接続の解除を行なう第2接続解除手段と、前記第2軸と前記第2回転要素との接続および接続の解除を行なう第3接続解除手段と、前記第2軸と前記第3回転要素との接続および接続の解除を行なう第4接続解除手段と、を備える手段であるものとすることもできる。この場合、第1接続解除手段により第1軸と第2回転要素とを接続し、第2接続解除手段により第1軸と第3回転要素との接続を解除し、第3接続解除手段により第2軸と第2回転要素との接続を解除し、第4接続解除手段により第2軸と第3回転要素とを接続することによりトルク増幅連結を行ない、第1接続解除手段により第1軸と第2回転要素との接続を解除し、第2接続解除手段により第1軸と第3回転要素とを接続し、第3接続解除手段により第2軸と第2回転要素とを接続し、第4接続解除手段により第2軸と第3回転要素との接続を解除することによりトルク減少連結を行なうことができる。また、第1接続解除手段により第1軸と第2回転要素とを接続すると共に第3接続解除手段により第2軸と第2回転要素とを接続することにより、内燃機関の出力軸と駆動軸とを直接連結することができる。この場合、第2接続解除手段により第1軸と第3回転要素とを接続するか第4接続解除手段により第2軸と第3回転要素とを接続するかのいずれかにより第1電動機と第2電動機の双方を駆動軸に直接接続することができる。また、第2接続解除手段により第1軸と第3回転要素とを接続すると共に第4接続解除手段により第2軸と第3回転要素とを接続することにより、内燃機関の出力軸と駆動軸とを直接連結すると共に第2電動機を駆動軸に直接連結することができる。この場合、第1接続解除手段により第1軸と第2回転要素とを接続するか第3接続解除手段により第2軸と第2回転要素とを接続するかのいずれかにより、さらに第1電動機を駆動軸に直接連結することができる。さらに、第1接続解除手段により第1軸と第2回転要素との接続を解除し、第2接続解除手段により第1軸と第3回転要素とを接続し、第3接続解除手段により第2軸と第2回転要素との接続を解除し、第4接続解除手段により第2軸と第3回転要素との接続を解除することにより、第2電動機と駆動軸とを直接連結することができる。この場合、第1接続解除手段により第1軸と第2回転要素とを接続することにより、さらに第1電動機を遊星歯車のギヤ比をもって駆動軸に連結することができる。
本発明の動力出力装置において、前記連結切替手段は、共線図において順に並ぶ第1回転要素と第2回転要素と第3回転要素とを有し該第2回転要素が前記第2軸に接続されると共に該第3回転要素が前記第1軸に接続された第1遊星歯車と、共線図において順に並ぶ第4回転要素と第5回転要素と第6回転要素とを有し該第4回転要素が前記第2軸に接続されると共に該第5回転要素が前記第1軸に接続された第2遊星歯車と、前記第3軸と前記第1回転要素との接続および接続の解除を行なう第1接続解除手段と、前記第3軸と前記第2回転要素との接続および接続の解除を行なう第2接続解除手段と、前記第4軸と前記第5回転要素との接続および接続の解除を行なう第3接続解除手段と、前記第4軸と前記第6回転要素との接続および接続の解除を行なう第4接続解除手段と、を備える手段であるものとすることもできる。この場合、第1接続解除手段により第3軸と第1回転要素との接続を解除し、第2接続解除手段により第3軸と第2回転要素とを接続し、第3接続解除手段により第4軸と第5回転要素との接続を解除し、第4接続解除手段により第4軸と第6回転要素とを接続することによりトルク増幅連結を行ない、第1接続解除手段により第3軸と第1回転要素とを接続し、第2接続解除手段により第3軸と第2回転要素との接続を解除し、第3接続解除手段により第4軸と第5回転要素とを接続し、第4接続解除手段により第4軸と第6回転要素との接続を解除することによりトルク減少連結を行なうことができる。また、第1接続解除手段により第3軸と第1回転要素とを接続すると共に第2接続解除手段により第3軸と第2回転要素とを接続することにより、内燃機関の出力軸と駆動軸とを直接連結すると共に第1電動機を駆動軸に直接連結することができる。この場合、第3接続解除手段により第4軸と第5回転要素とを接続するか第4接続解除手段により第4軸と第6回転要素とを接続するかのいずれかにより、さらに第2電動機を駆動軸に直接連結することができる。さらに、第3接続解除手段により第4軸と第5回転要素とを接続すると共に第4接続解除手段により第4軸と第6回転要素とを接続することにより、内燃機関の出力軸と駆動軸とを直接連結すると共に第2電動機を駆動軸に直接連結することができる。この場合、第2接続解除手段により第3軸と第2回転要素とを接続することにより、さらに第1電動機を駆動軸に直接連結することができる。また、第1接続解除手段により第3軸と第1回転要素とを接続し、第2接続解除手段により第3軸と第2回転要素との接続を解除し、第3接続解除手段により第4軸と第5回転要素との接続を解除し、第4接続解除手段により第4軸と第6回転要素とを接続することにより、第1軸と第2軸と第3軸と第4軸の4軸のうちいずれか2軸の回転数に基づいて残余の2軸を回転させるよう4軸を連結する4要素連結とすることができる。
本発明の動力出力装置において、前記連結切替手段は、共線図において順に並ぶ第1回転要素と第2回転要素と第3回転要素とを有し該第2回転要素が前記第2軸および前記第4軸に接続されると共に該第3回転要素が前記第1軸に接続された第1遊星歯車と、共線図において順に並ぶ第4回転要素と第5回転要素と第6回転要素とを有し該第5回転要素が前記第1軸に接続されると共に該第6回転要素が前記第2軸および前記第4軸に接続された第2遊星歯車と、前記第3軸と前記第1回転要素との接続および接続の解除を行なう第1接続解除手段と、前記第3軸と前記第4回転要素との接続および接続の解除を行なう第2接続解除手段と、を備える手段であるものとすることもできる。この場合、第1接続解除手段により第3軸と第1回転要素とを接続すると共に第2接続解除手段により第3軸と第4回転要素との接続を解除することによりトルク増幅連結を行ない、第1接続解除手段により第3軸と第1回転要素との接続を解除すると共に第2接続解除手段により第3軸と第4回転要素とを接続することによりトルク減少連結を行なうことができる。また、第1接続解除手段により第3軸と第1回転要素とを接続すると共に第2接続解除手段により第3軸と第4回転要素とを接続することにより内燃機関の出力軸を駆動軸に直接連結すると共に第1電動機と第2電動機とを駆動軸に直接連結することができる。
本発明の動力出力装置において、前記連結切替手段は、共線図において順に並ぶ第1回転要素と第2回転要素と第3回転要素とを有し該第2回転要素が前記第2軸に接続されると共に該第3回転要素が前記第1軸に接続された第1遊星歯車と、共線図において順に並ぶ第4回転要素と第5回転要素と第6回転要素とを有し該第5回転要素が前記第1軸に接続されると共に該第6回転要素が前記第2軸に接続された第2遊星歯車と、前記第3軸と前記第1回転要素との接続および接続の解除を行なう第1接続解除手段と、前記第3軸と前記第4回転要素との接続および接続の解除を行なう第2接続解除手段と、前記第4軸と前記第2回転要素との接続および接続の解除を行なう第3接続解除手段と、前記第4軸と前記第3回転要素との接続および接続の解除を行なう第4接続解除手段と、を備える手段であるものとすることもできる。この場合、第1接続解除手段により第3軸と第1回転要素との接続を解除すると共に第2接続解除手段により第3軸と第4回転要素とを接続し、第3接続解除手段により第4軸と第5回転要素とを接続するか第4接続解除手段により第4軸と第6回転要素とを接続するかのいずれかによりトルク増幅連結を行ない、第1接続解除手段により第3軸と第1回転要素とを接続すると共に第2接続解除手段により第3軸と第4回転要素との接続を解除し、第3接続解除手段により第4軸と第5回転要素とを接続するか第4接続解除手段により第4軸と第6回転要素とを接続するかのいずれかによりトルク減少連結を行なうことができる。また、第1接続解除手段により第3軸と第1回転要素とを接続すると共に第2接続解除手段により第3軸と第4回転要素とを接続することとにより、内燃機関の出力軸を駆動軸に直接連結すると共に第1電動機を駆動軸に直接連結することができる。この場合、第3接続解除手段により第4軸と第5回転要素とを接続するか第4接続解除手段により第4軸と第6回転要素とを接続するかのいずれかにより、さらに第2電動機を駆動軸に直接連結することができる。あるいは、第3接続解除手段により第4軸と第5回転要素とを接続すると共に第4接続解除手段により第4軸と第6回転要素とを接続することにより、内燃機関の出力軸を駆動軸に直接連結すると共に第2電動機を駆動軸に直接連結することができる。この場合、第1接続解除手段により第3軸と第1回転要素とを接続するか第2接続解除手段により第3軸と第4回転要素とを接続するかのいずれかにより、さらに第1電動機を駆動軸に直接連結することができる。
本発明の動力出力装置において、前記第1電動機および前記第2電動機と電力のやり取りを行なう蓄電手段を備えるものとすることもできる。こうすれば、内燃機関の動力を用いて蓄電手段を充電したり、蓄電手段からの電力により第1電動機や第2電動機を駆動することができる。即ち、動力の過不足を蓄電手段の充放電により賄うことができる。
本発明の動力出力装置において、操作者の操作に基づいて前記駆動軸に出力すべき要求動力を設定する要求動力設定手段と、該設定された要求動力に基づく動力が前記駆動軸に出力されるよう前記内燃機関と前記第1電動機と前記第2電動機と前記連結切替手段とを制御する制御手段と、を備えるものとすることもできる。こうすれば、操作者の操作に基づく要求動力に応じた動力を駆動軸に出力することができる。
この制御手段を備える態様の本発明の動力出力装置において、前記制御手段は、前記設定された要求動力が比較的低回転高トルクの領域として設定された低回転高トルク領域のときには前記トルク減少連結となるよう前記連結切替手段を制御する手段であるものとしたり、逆に、前記設定された要求動力が比較的低回転高トルクの領域として設定された低回転高トルク領域のときには前記トルク増幅連結となるよう前記連結切替手段を制御する手段であるものとすることもできる。
また、制御手段を備える態様の本発明の動力出力装置において、前記制御手段は、前記設定された要求動力が比較的高回転低トルクの領域として設定された高回転低トルク領域のときには前記トルク増幅連結となるよう前記連結切替手段を制御する手段であるものとしたり、逆に、前記設定された要求動力が比較的高回転低トルクの領域として設定された高回転低トルク領域のときには前記トルク減少連結となるよう前記連結切替手段を制御する手段であるものとすることもできる。
あるいは、制御手段を備える態様の本発明の動力出力装置において、前記制御手段は、前記内燃機関に対しては同一のパワーを出力可能な運転ポイントのうち効率がよくなる傾向の運転ポイントで運転制御する手段であるものとすることもできる。こうすれば、装置全体のエネルギ効率を向上させることができる。
本発明の自動車は、上述のいずれかの態様の本発明の動力出力装置、即ち、基本的には、駆動軸に動力を出力する動力出力装置であって、内燃機関と、発電可能な第1電動機と、発電可能な第2電動機と、前記駆動軸に接続された第1軸と前記内燃機関の出力軸に接続された第2軸と前記第1電動機に接続された第3軸と前記第2電動機に接続された第4軸を含む多数軸を有し、前記第3軸と前記第4軸のうちの一方の軸を回転停止状態としたときに前記内燃機関からの動力をトルクを増幅させて前記駆動軸に出力するよう該一方の軸と前記第1軸と前記第2軸とを連結すると共に前記第3軸と前記第4軸のうちの他方の軸を前記第1軸または第2軸に連結するトルク増幅連結と、前記第3軸と前記第4軸のうちの一方の軸を回転停止状態としたときに前記内燃機関からの動力をトルクを減少させて前記駆動軸に出力するよう該一方の軸と前記第1軸と前記第2軸とを連結すると共に前記第3軸と前記第4軸のうちの他方の軸を前記第1軸または前記第2軸に連結するトルク減少連結とを含む複数の連結を切り替えて前記内燃機関からの動力の少なくとも一部を前記駆動軸に出力可能な連結切替手段と、を備える動力出力装置を搭載し、前記駆動軸に車軸が連結されてなることを要旨とする。
この本発明の自動車では、上述のいずれかの態様の本発明の動力出力装置を搭載するから、本発明の動力出力装置が奏する効果、例えば、駆動軸に必要な動力に応じて連結を切り替えることにより装置全体のエネルギ効率を向上させることができる効果や第1電動機や第2電動機の小型化を図ることにより装置の小型化を図ることができる効果などと同様な効果を奏することができる。
本発明の動力伝達装置は、
内燃機関と発電可能な第1電動機と発電可能な第2電動機とから出力された動力を駆動軸に伝達する動力伝達装置であって、
前記駆動軸に接続された第1軸と前記内燃機関の出力軸に接続された第2軸と前記第1電動機に接続された第3軸と前記第2電動機に接続された第4軸を含む多数軸を有し、前記第3軸と前記第4軸のうちの一方の軸を回転停止状態としたときに前記内燃機関からの動力をトルクを増幅させて前記駆動軸に出力するよう該一方の軸と前記第1軸と前記第2軸とを連結すると共に前記第3軸と前記第4軸のうちの他方の軸を前記第1軸または第2軸に連結するトルク増幅連結と、前記第3軸と前記第4軸のうちの一方の軸を回転停止状態としたときに前記内燃機関からの動力をトルクを減少させて前記駆動軸に出力するよう該一方の軸と前記第1軸と前記第2軸とを連結すると共に前記第3軸と前記第4軸のうちの他方の軸を前記第1軸または前記第2軸に連結するトルク減少連結とを含む複数の連結を切り替えて前記内燃機関と前記第1電動機と前記第2電動機とから出力された動力を前記駆動軸に伝達する
ことを要旨とする。
この本発明の動力伝達装置では、第1電動機に接続された第3軸と第2電動機に接続された第4軸のうちの一方の軸を回転停止状態としたときに内燃機関からの動力をトルクを増幅させて駆動軸に出力するようこの一方の軸と駆動軸に接続された第1軸と内燃機関の出力軸に接続された第2軸とを連結すると共に第3軸と第4軸のうちの他方の軸を第1軸か第2軸に連結するトルク増幅連結と、第3軸と第4軸のうちの一方の軸を回転停止状態としたときに内燃機関からの動力をトルクを減少させて駆動軸に出力するようこの一方の軸と第1軸と第2軸とを連結すると共に第3軸と第4軸のうちの他方の軸を第1軸か第2軸に連結するトルク減少連結とを含む複数の連結を切り替えて内燃機関と第1電動機と第2電動機とから出力された動力を駆動軸に伝達することができる。即ち、トルク増幅連結とトルク減少連結とを含む複数の連結を切り替えて内燃機関からの動力をトルク変換して駆動軸に伝達することができるのである。したがって、駆動軸に必要な動力に応じて連結を切り替えることにより、装置全体のエネルギ効率を向上させることができる。また、このように連結を切り替えることにより、第1電動機や第2電動機の小型化を図ることができ、これにより装置の小型化を図ることができる。
こうした本発明の動力伝達装置において、共線図において順に並ぶ第1回転要素と第2回転要素と第3回転要素とを有し該第1回転要素が前記第3軸に接続されると共に該第3回転要素が前記第4軸に接続された遊星歯車と、前記第1軸と前記第2回転要素との接続および接続の解除を行なう第1接続解除手段と、前記第1軸と前記第3回転要素との接続および接続の解除を行なう第2接続解除手段と、前記第2軸と前記第2回転要素との接続および接続の解除を行なう第3接続解除手段と、前記第2軸と前記第3回転要素との接続および接続の解除を行なう第4接続解除手段と、を備えるものとすることもできる。この場合、第1接続解除手段により第1軸と第2回転要素とを接続し、第2接続解除手段により第1軸と第3回転要素との接続を解除し、第3接続解除手段により第2軸と第2回転要素との接続を解除し、第4接続解除手段により第2軸と第3回転要素とを接続することによりトルク増幅連結を行ない、第1接続解除手段により第1軸と第2回転要素との接続を解除し、第2接続解除手段により第1軸と第3回転要素とを接続し、第3接続解除手段により第2軸と第2回転要素とを接続し、第4接続解除手段により第2軸と第3回転要素との接続を解除することによりトルク減少連結を行なうことができる。また、第1接続解除手段により第1軸と第2回転要素とを接続すると共に第3接続解除手段により第2軸と第2回転要素とを接続することにより、内燃機関の出力軸と駆動軸とを直接連結することができる。この場合、第2接続解除手段により第1軸と第3回転要素とを接続するか第4接続解除手段により第2軸と第3回転要素とを接続するかのいずれかにより第1電動機と第2電動機の双方を駆動軸に直接接続することができる。また、第2接続解除手段により第1軸と第3回転要素とを接続すると共に第4接続解除手段により第2軸と第3回転要素とを接続することにより、内燃機関の出力軸と駆動軸とを直接連結すると共に第2電動機を駆動軸に直接連結することができる。この場合、第1接続解除手段により第1軸と第2回転要素とを接続するか第3接続解除手段により第2軸と第2回転要素とを接続するかのいずれかにより、さらに第1電動機を駆動軸に直接連結することができる。さらに、第1接続解除手段により第1軸と第2回転要素との接続を解除し、第2接続解除手段により第1軸と第3回転要素とを接続し、第3接続解除手段により第2軸と第2回転要素との接続を解除し、第4接続解除手段により第2軸と第3回転要素との接続を解除することにより、第2電動機と駆動軸とを直接連結することができる。この場合、第1接続解除手段により第1軸と第2回転要素とを接続することにより、さらに第1電動機を遊星歯車のギヤ比をもって駆動軸に連結することができる。
また、本発明の動力伝達装置において、共線図において順に並ぶ第1回転要素と第2回転要素と第3回転要素とを有し該第2回転要素が前記第2軸に接続されると共に該第3回転要素が前記第1軸に接続された第1遊星歯車と、共線図において順に並ぶ第4回転要素と第5回転要素と第6回転要素とを有し該第4回転要素が前記第2軸に接続されると共に該第5回転要素が前記第1軸に接続された第2遊星歯車と、前記第3軸と前記第1回転要素との接続および接続の解除を行なう第1接続解除手段と、前記第3軸と前記第2回転要素との接続および接続の解除を行なう第2接続解除手段と、前記第4軸と前記第5回転要素との接続および接続の解除を行なう第3接続解除手段と、前記第4軸と前記第6回転要素との接続および接続の解除を行なう第4接続解除手段と、を備えるものとすることもできる。この場合、第1接続解除手段により第3軸と第1回転要素との接続を解除し、第2接続解除手段により第3軸と第2回転要素とを接続し、第3接続解除手段により第4軸と第5回転要素との接続を解除し、第4接続解除手段により第4軸と第6回転要素とを接続することによりトルク増幅連結を行ない、第1接続解除手段により第3軸と第1回転要素とを接続し、第2接続解除手段により第3軸と第2回転要素との接続を解除し、第3接続解除手段により第4軸と第5回転要素とを接続し、第4接続解除手段により第4軸と第6回転要素との接続を解除することによりトルク減少連結を行なうことができる。また、第1接続解除手段により第3軸と第1回転要素とを接続すると共に第2接続解除手段により第3軸と第2回転要素とを接続することにより、内燃機関の出力軸と駆動軸とを直接連結すると共に第1電動機を駆動軸に直接連結することができる。この場合、第3接続解除手段により第4軸と第5回転要素とを接続するか第4接続解除手段により第4軸と第6回転要素とを接続するかのいずれかにより、さらに第2電動機を駆動軸に直接連結することができる。さらに、第3接続解除手段により第4軸と第5回転要素とを接続すると共に第4接続解除手段により第4軸と第6回転要素とを接続することにより、内燃機関の出力軸と駆動軸とを直接連結すると共に第2電動機を駆動軸に直接連結することができる。この場合、第2接続解除手段により第3軸と第2回転要素とを接続することにより、さらに第1電動機を駆動軸に直接連結することができる。また、第1接続解除手段により第3軸と第1回転要素とを接続し、第2接続解除手段により第3軸と第2回転要素との接続を解除し、第3接続解除手段により第4軸と第5回転要素との接続を解除し、第4接続解除手段により第4軸と第6回転要素とを接続することにより、第1軸と第2軸と第3軸と第4軸の4軸のうちいずれか2軸の回転数に基づいて残余の2軸を回転させるよう4軸を連結する4要素連結とすることができる。
さらに、本発明の動力伝達装置において、共線図において順に並ぶ第1回転要素と第2回転要素と第3回転要素とを有し該第2回転要素が前記第2軸および前記第4軸に接続されると共に該第3回転要素が前記第1軸に接続された第1遊星歯車と、共線図において順に並ぶ第4回転要素と第5回転要素と第6回転要素とを有し該第5回転要素が前記第1軸に接続されると共に該第6回転要素が前記第2軸および前記第4軸に接続された第2遊星歯車と、前記第3軸と前記第1回転要素との接続および接続の解除を行なう第1接続解除手段と、前記第3軸と前記第4回転要素との接続および接続の解除を行なう第2接続解除手段と、を備えるものとすることもできる。この場合、第1接続解除手段により第3軸と第1回転要素とを接続すると共に第2接続解除手段により第3軸と第4回転要素との接続を解除することによりトルク増幅連結を行ない、第1接続解除手段により第3軸と第1回転要素との接続を解除すると共に第2接続解除手段により第3軸と第4回転要素とを接続することによりトルク減少連結を行なうことができる。また、第1接続解除手段により第3軸と第1回転要素とを接続すると共に第2接続解除手段により第3軸と第4回転要素とを接続することにより内燃機関の出力軸を駆動軸に直接連結すると共に第1電動機と第2電動機とを駆動軸に直接連結することができる。
あるいは、本発明の動力伝達装置において、共線図において順に並ぶ第1回転要素と第2回転要素と第3回転要素とを有し該第2回転要素が前記第2軸に接続されると共に該第3回転要素が前記第1軸に接続された第1遊星歯車と、共線図において順に並ぶ第4回転要素と第5回転要素と第6回転要素とを有し該第5回転要素が前記第1軸に接続されると共に該第6回転要素が前記第2軸に接続された第2遊星歯車と、前記第3軸と前記第1回転要素との接続および接続の解除を行なう第1接続解除手段と、前記第3軸と前記第4回転要素との接続および接続の解除を行なう第2接続解除手段と、前記第4軸と前記第2回転要素との接続および接続の解除を行なう第3接続解除手段と、前記第4軸と前記第3回転要素との接続および接続の解除を行なう第4接続解除手段と、を備えるものとすることもできる。この場合、第1接続解除手段により第3軸と第1回転要素との接続を解除すると共に第2接続解除手段により第3軸と第4回転要素とを接続し、第3接続解除手段により第4軸と第5回転要素とを接続するか第4接続解除手段により第4軸と第6回転要素とを接続するかのいずれかによりトルク増幅連結を行ない、第1接続解除手段により第3軸と第1回転要素とを接続すると共に第2接続解除手段により第3軸と第4回転要素との接続を解除し、第3接続解除手段により第4軸と第5回転要素とを接続するか第4接続解除手段により第4軸と第6回転要素とを接続するかのいずれかによりトルク減少連結を行なうことができる。また、第1接続解除手段により第3軸と第1回転要素とを接続すると共に第2接続解除手段により第3軸と第4回転要素とを接続することとにより、内燃機関の出力軸を駆動軸に直接連結すると共に第1電動機を駆動軸に直接連結することができる。この場合、第3接続解除手段により第4軸と第5回転要素とを接続するか第4接続解除手段により第4軸と第6回転要素とを接続するかのいずれかにより、さらに第2電動機を駆動軸に直接連結することができる。あるいは、第3接続解除手段により第4軸と第5回転要素とを接続すると共に第4接続解除手段により第4軸と第6回転要素とを接続することにより、内燃機関の出力軸を駆動軸に直接連結すると共に第2電動機を駆動軸に直接連結することができる。この場合、第1接続解除手段により第3軸と第1回転要素とを接続するか第2接続解除手段により第3軸と第4回転要素とを接続するかのいずれかにより、さらに第1電動機を駆動軸に直接連結することができる。
次に、本発明を実施するための最良の形態を実施例を用いて説明する。
図1は、本発明の実施例としての動力出力装置を搭載するハイブリッド自動車20の構成の概略を示す構成図である。実施例のハイブリッド自動車20は、図示するように、エンジン22と、エンジン22のクランクシャフト26にダンパ28を介して接続されると共に駆動輪69a,69bにデファレンシャルギヤ68やギヤ機構66,駆動軸65を介して接続された動力分配統合機構30と、この動力分配統合機構30に接続された発電可能なモータMG1と、同じく動力分配統合機構30に接続された発電可能なモータMG2と、動力出力装置全体をコントロールするハイブリッド用電子制御ユニット70とを備える。
エンジン22は、ガソリンまたは軽油などの炭化水素系の燃料により動力を出力する内燃機関であり、エンジン22の運転状態を検出する各種センサから信号を入力するエンジン用電子制御ユニット(以下、エンジンECUという)24により燃料噴射制御や点火制御,吸入空気量調節制御などの運転制御を受けている。エンジンECU24は、ハイブリッド用電子制御ユニット70と通信しており、ハイブリッド用電子制御ユニット70からの制御信号によりエンジン22を運転制御すると共に必要に応じてエンジン22の運転状態に関するデータをハイブリッド用電子制御ユニット70に出力する。
動力分配統合機構30は、プラネタリギヤP1と4つのクラッチC1〜C4とにより構成されている。プラネタリギヤP1のサンギヤ31にはモータMG1の回転軸が接続されており、リングギヤ32にはモータMG2の回転軸が接続されている。プラネタリギヤP1のピニオンギヤ33を連結するキャリア34にはクラッチC1を介してギヤ機構66が連結された駆動軸65に接続されていると共にクラッチC3を介してエンジン22のクランクシャフト26が接続されている。また、プラネタリギヤP1のリングギヤ32にはクラッチC2を介して駆動軸65が接続されていると共にクラッチC4を介してエンジン22のクランクシャフト26が接続されている。
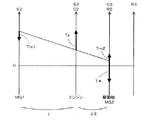
こうして構成された動力分配統合機構30は、クラッチC1とクラッチC4とをオンとすると共にクラッチC2とクラッチC3とをオフとすることにより、エンジン22からの動力を動力分配統合機構30とモータMG1とモータMG2とによりトルク変換して駆動軸65に出力することができる。この状態における動力分配統合機構30の回転要素の回転数とトルクとの力学的な関係を示す共線図の一例を図2に示す。図中、左からS軸はモータMG1の回転数Nm1であるプラネタリギヤP1のサンギヤ31の回転数を示し、C軸はエンジン22の回転数NeであるプラネタリギヤP1のキャリア34の回転数を示し、R軸は駆動軸65の回転数NdやモータMG2の回転数Nm2であるプラネタリギヤP1のリングギヤ32の回転数を示す。なお、図中「ρ1」はプラネタリギヤP1のギヤ比(サンギヤ31の歯数/リングギヤ32の歯数)である。この共線図は、各回転要素(各軸)に作用するトルクを共線を梁に見立てたときにこの梁に作用する力と同一視することができるものである。この接続状態では、S軸のモータMG1の回転数Nm1が値0のときを考えれば、エンジン22からの動力をトルクを減少して駆動軸65に出力するものとなり、逆に、S軸のモータMG1の回転数Nm1が大きく駆動軸65の回転数が値0近傍のときを考えれば、エンジン22からの動力をトルクを増幅して駆動軸65に出力するものとなる。したがって、駆動軸65に低回転高トルクの動力を出力する際には都合のよい接続状態となる。なお、駆動軸65に高回転低トルクの動力を出力する際には、場合によってはS軸のモータMG1が負の回転数で回転し、エンジン22から出力した動力に動力分配統合機構30でモータMG1からの動力を加えて駆動軸65に出力し、駆動軸65の動力の一部を用いてモータMG1により発電し、この発電した電力をモータMG1に供給することとなり、エンジン22から出力された動力が動力−電力−動力−電力のように循環するいわゆる動力循環が生じ、エネルギ効率が低下する場合も生じる。
また、動力分配統合機構30は、クラッチC1〜C4のいずれか3つ以上のクラッチをオンとすることにより、エンジン22のクランクシャフト26とモータMG1の回転軸とモータMG2の回転軸と駆動軸65とを一体の回転体とすることができる。このときには、エンジン22からの動力を直接駆動軸65に出力することができると共にこれに加えてモータMG1やモータMG2から駆動軸65への動力の入出力も行なうことができる。この接続関係では、エンジン22が効率よく運転できる運転領域で運転可能なときには、エンジン22から出力された動力が直接駆動軸65に出力されるから、エンジン22からの動力の一部を一旦電力に変換してから動力に再変換する場合に比して効率のよいものとなる。
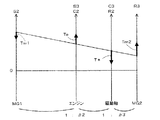
さらに、動力分配統合機構30は、クラッチC1とクラッチC4とをオフとすると共にクラッチC2とクラッチC3とをオンとすることにより、共線図上におけるエンジン22のクランクシャフト26と駆動軸65とを入れ替えた接続とすることができる。この状態における動力分配統合機構30の回転要素の回転数とトルクとの力学的な関係を示す共線図の一例を図3に示す。この接続状態では、S軸のモータMG1の回転数Nm1が値0のときを考えれば、エンジン22からの動力をトルクを増幅して駆動軸65に出力するものとなり、逆に、S軸のモータMG1の回転数Nm1が大きくエンジン22の回転数Neが小さいときを考えれば、エンジン22からの動力をトルクを減少して駆動軸65に出力するものとなる。なお、この接続状態でも、エンジン22からの動力を動力分配統合機構30とモータMG1とモータMG2とによりトルク変換して駆動軸65に出力することができる。
この他、動力分配統合機構30は、クラッチC1をオンとすると共にクラッチC2〜C4をオフとすることにより、モータMG2だけを駆動軸65に接続してモータMG2からの動力だけで走行する接続状態としたり、クラッチC1とクラッチC2をオンとすると共にクラッチC3とクラッチC4とをオフとすることにより、エンジン22のクランクシャフト26を切り離した状態でモータMG1とモータMG2とを駆動軸65に接続してモータMG1やモータMG2からの動力により走行する接続状態とするなど種々の接続状態とすることもできる。
モータMG1およびモータMG2は、いずれも発電機として駆動することができると共に電動機として駆動できる周知の同期発電電動機として構成されており、インバータ51,52を介してバッテリ60と電力のやりとりを行なう。インバータ51,52とバッテリ60とを接続する電力ライン64は、各インバータ51,52が共用する正極母線および負極母線として構成されており、モータMG1,MG2のいずれかで発電される電力を他のモータで消費することができるようになっている。したがって、バッテリ60は、モータMG1,MG2のいずれかから生じた電力や不足する電力により充放電されることになる。なお、モータMG1,MG2により電力収支のバランスをとるものとすれば、バッテリ60は充放電されない。モータMG1,MG2は、いずれもモータ用電子制御ユニット(以下、モータECUという)50により駆動制御されている。モータECU50には、モータMG1,MG2を駆動制御するために必要な信号、例えばモータMG1,MG2の回転子の回転位置を検出する回転位置検出センサ53,54からの信号や図示しない電流センサにより検出されるモータMG1,MG2に印加される相電流などが入力されており、モータECU50からは、インバータ51,52へのスイッチング制御信号が出力されている。モータECU50は、ハイブリッド用電子制御ユニット70と通信しており、ハイブリッド用電子制御ユニット70からの制御信号によってモータMG1,MG2を駆動制御すると共に必要に応じてモータMG1,MG2の運転状態に関するデータをハイブリッド用電子制御ユニット70に出力する。
バッテリ60は、バッテリ用電子制御ユニット(以下、バッテリECUという)62によって管理されている。バッテリECU62には、バッテリ60を管理するのに必要な信号、例えば、バッテリ60の端子間に設置された図示しない電圧センサからの端子間電圧,バッテリ60の出力端子に接続された電力ライン64に取り付けられた図示しない電流センサからの充放電電流,バッテリ60に取り付けられた図示しない温度センサからの電池温度などが入力されており、必要に応じてバッテリ60の状態に関するデータを通信によりハイブリッド用電子制御ユニット70に出力する。なお、バッテリECU62では、バッテリ60を管理するために電流センサにより検出された充放電電流の積算値に基づく残容量(SOC)やこの残容量(SOC)と電池温度とに基づく入出力制限Win,Woutなども演算または設定している。
ハイブリッド用電子制御ユニット70は、CPU72を中心とするマイクロプロセッサとして構成されており、CPU72の他に処理プログラムを記憶するROM74と、データを一時的に記憶するRAM76と、図示しない入出力ポートおよび通信ポートとを備える。ハイブリッド用電子制御ユニット70には、イグニッションスイッチ80からのイグニッション信号,シフトレバー81の操作位置を検出するシフトポジションセンサ82からのシフトポジションSP,アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc,ブレーキペダル85の踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP,車速センサ88からの車速Vなどが入力ポートを介して入力されている。また、ハイブリッド用電子制御ユニット70からは、クラッチC1〜C4への駆動信号などが出力ポートを介して出力されている。更に、ハイブリッド用電子制御ユニット70は、前述したように、エンジンECU24やモータECU50,バッテリECU62と通信ポートを介して接続されており、エンジンECU24やモータECU50,バッテリECU62と各種制御信号やデータのやりとりを行なっている。
こうして構成された実施例のハイブリッド自動車20は、運転者によるアクセルペダル83の踏み込み量に対応するアクセル開度Accと車速Vとに基づいて駆動軸65に出力すべき駆動要求トルクTr*を計算し、この駆動要求トルクTr*に対応する要求動力が効率よく駆動軸65に出力されるように、クラッチC1〜C4がオンオフ制御されると共にこれに伴ってエンジン22とモータMG1とモータMG2とが運転制御される。エンジン22とモータMG1とモータMG2の運転制御としては、要求動力に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力される動力のすべてが動力分配統合機構30とモータMG1とモータMG2とによってトルク変換されて駆動軸65に出力されるようモータMG1およびモータMG2を駆動制御するトルク変換運転モードや要求動力とバッテリ60の充放電に必要な電力との和に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ60の充放電を伴ってエンジン22から出力される動力の全部またはその一部が動力分配統合機構30とモータMG1とモータMG2とによるトルク変換を伴って要求動力が駆動軸65に出力されるようモータMG1およびモータMG2を駆動制御する充放電運転モード、エンジン22の運転を停止してモータMG1やモータMG2から要求動力に見合う動力を駆動軸65に出力するよう運転制御するモータ運転モードなどがある。なお、トルク変換運転モードと充放電運転モードはバッテリ60の充放電を行なうか否かの差があるだけで実質的な制御における差違はない。
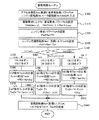
次に、こうして構成された実施例のハイブリッド自動車20の動作について説明する。図4は、ハイブリッド用電子制御ユニット70により実行される駆動制御ルーチンの一例を示すフローチャートである。このルーチンは、所定時間毎(例えば8msec毎)に繰り返し実行される。
駆動制御ルーチンが実行されると、ハイブリッド用電子制御ユニット70のCPU72は、まず、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V,エンジン22の回転数Ne,モータMG1,MG2の回転数Nm1,Nm2,バッテリ60を充放電するための要求充放電パワーPb*など制御に必要なデータを入力する処理を実行する(ステップS100)。ここで、エンジン22の回転数Neは、図示しないクランクポジションセンサにより検出されたクランクシャフト26の回転位置に基づいて計算されたものをエンジンECU24から通信により入力するものとした。また、モータMG1,MG2の回転数Nm1,Nm2は、回転位置検出センサ53,54により検出されるモータMG1,MG2の回転子の回転位置に基づいて計算されたものをモータECU50から通信により入力するものとした。さらに、バッテリ60を充放電するための要求充放電パワーPb*は、残容量(SOC)に基づいて設定されたものをバッテリECU62から通信により入力するものとした。
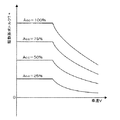
こうしてデータを入力すると、入力したアクセル開度Accと車速Vとに基づいて車両に要求されるトルクとして駆動軸65に出力すべき駆動要求トルクT*と車両に要求される車両要求パワーP*とを設定する(ステップS110)。駆動要求トルクT*は、実施例では、アクセル開度Accと車速Vと駆動要求トルクT*との関係を予め定めて要求トルク設定用マップとしてROM74に記憶しておき、アクセル開度Accと車速Vとが与えられると記憶したマップから対応する駆動要求トルクT*を導出して設定するものとした。図5に駆動要求トルク設定用マップの一例を示す。車両要求パワーP*は、設定した駆動要求トルクT*に駆動軸65の回転数Nrを乗じたものとバッテリ60が要求する要求充放電パワーPb*とロスLossとの和として計算することができる。なお、駆動軸65の回転数Ndは、車速Vに換算係数kを乗じることによって求めることができる。
駆動要求トルクT*と車両要求パワーP*とを設定すると、設定した車両要求パワーP*に基づいてエンジン22から出力すべきエンジン要求パワーPe*を設定する(ステップS120)。エンジン要求パワーPe*の設定は、エンジン22の応答性がモータMG1,MG2などに比して遅いことから、いままでにこのルーチンが実行されて設定されたエンジン要求パワーPe*と今回設定された車両要求パワーP*とを用いて車両要求パワーP*がいずれエンジン要求パワーPe*として設定されるようなまし処理やレート処理を用いてエンジン要求パワーPe*を設定する。続いて、設定したエンジン要求パワーPe*に基づいてエンジン22の目標回転数Ne*と目標トルクTe*とを設定する(ステップS130)。この設定は、エンジン22を効率よく動作させる動作ラインとエンジン要求パワーPe*とに基づいて目標回転数Ne*と目標トルクTe*とを設定する。エンジン22の動作ラインの一例と目標回転数Ne*と目標トルクTe*とを設定する様子を図6に示す。図示するように、目標回転数Ne*と目標トルクTe*は、動作ラインとエンジン要求パワーPe*(Ne*×Te*)が一定の曲線との交点により求めることができる。
次に、車速Vを閾値Vref1や閾値Vref2と比較する(ステップS140)。ここで、閾値Vref1や閾値Vref2は、車両全体の効率をよくするクラッチC1〜C4の接続状態を決定するために用いるものであり、閾値Vref1は比較的低速(例えば30km/hや40km/hなど)に設定されており、閾値Vref2は比較的高速(例えば、80km/hや90km/hなど)に設定されている。車速Vが閾値Vref1未満の比較的低速のときには、低回転高トルクの動力を出力するのに有利なものとなるようクラッチC1とクラッチC4をオンとすると共にクラッチC2とクラッチC3とをオフとして動力分配統合機構30を図2の共線図に示した接続状態とし(ステップS150)、エンジン22が目標回転数Ne*で回転するようモータMG1のトルク指令Tm1*を次式(1)により計算して設定すると共に(ステップS160)、駆動要求トルクT*が駆動軸65に出力されるようモータMG2のトルク指令Tm2*を式(2)により計算して設定する(ステップS170)。ここで、式(1)は、エンジン22を目標回転数Ne*で回転させるようモータMG1のトルク指令Tm1*を計算するためのフィードバック制御における関係式であり、式(2)中、右辺第2項の「k1」は比例項のゲインであり、右辺第3項の「k2」は積分項のゲインである。また、式(2)は、上述した図2の共線図における力学的関係から容易に求めることができる。
Tm1*=前回Tm1*+k1(Ne*−Ne)+k2∫(Ne*−Ne)dt (1)
Tm2*=T*−Tm1*/ρ1 (2)
こうしてモータMG1,MG2のトルク指令Tm1*,Tm2*を設定すると、設定したエンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に送信すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40に送信して(ステップS240)、駆動制御ルーチンを終了する。目標回転数Ne*と目標トルクTe*とを受信したエンジンECU24は、エンジン22が目標回転数Ne*と目標トルクTe*とによって示される運転ポイントで運転されるようにエンジン22における燃料噴射制御や点火制御などの制御を行なう。また、トルク指令Tm1*,Tm2*を受信したモータECU50は、トルク指令Tm1*でモータMG1が駆動されると共にトルク指令Tm2*でモータMG2が駆動されるようインバータ51,52のスイッチング素子のスイッチング制御を行なう。こうした制御により、比較的低速時における車両のエネルギ効率を向上させることができる。
ステップS140で車速Vが閾値Vref1以上で閾値Vref2未満の比較的中速であると判定されると、比較的中速で効率がよくなるようクラッチC1〜C4のいずれか3つをオンとして動力分配統合機構30の接続状態をエンジン22のクランクシャフト26とモータMG1の回転軸とモータMG2の回転軸と駆動軸65とが一体の回転体として回転する状態とし(ステップS180)、エンジン22の目標回転数Ne*に駆動軸65の回転数Nd(k・V)を設定すると共にエンジン要求パワーPe*を目標回転数Ne*で割って目標トルクTe*を設定し(ステップS190)、駆動軸65に駆動要求トルクT*が出力されるようモータMG1,MG2のトルク指令Tm1*,Tm2*を設定し(ステップS200)、設定したエンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に送信すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40に送信して(ステップS240)、駆動制御ルーチンを終了する。ここで、モータMG1,MG2のトルク指令Tm1*,Tm2*は、目標トルクTe*とを含めた和が駆動要求トルクT*となれば如何なる配分により設定してもよい。こうした制御により、比較的中速時における車両のエネルギ効率を向上させることができる。
ステップS140で車速Vが閾値Vref2以上であると判定されると、クラッチC2とクラッチC3をオンとすると共にクラッチC1とクラッチC4をオフとして動力分配統合機構30の接続状態を図3の共線図に示した状態とし(ステップS210)、エンジン22が目標回転数Ne*で回転するようモータMG1のトルク指令Tm1*を上述した式(1)により計算して設定すると共に(ステップS220)、駆動要求トルクT*が駆動軸65に出力されるようモータMG2のトルク指令Tm2*を次式(3)により計算して設定し(ステップS230)、設定したエンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に送信すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40に送信して(ステップS240)、駆動制御ルーチンを終了する。こうした制御により、比較的高速時における車両のエネルギ効率を向上させることができる。ここで、式(3)中の右辺第3項は、回転数Neで回転するエンジン22から出力されるトルクTeを演算するものであり、例えば、図6に例示した動作ラインを用いて求めることができる。なお、高速走行時に動力分配統合機構30をこの図3の共線図の状態とするのは、動力分配統合機構30を図2の共線図の状態とすると、動力循環が生じてエネルギ効率が低下する場合が生じるためである。
Tm2*=T*−Tm1*−f(Ne) (3)
以上説明した実施例のハイブリッド自動車20によれば、走行状態に応じた接続状態に動力分配統合機構30を切り替えて走行することができる。この結果、車両全体のエネルギ効率を向上させることができる。即ち、車速Vが閾値Vref1未満の比較的低速のときには、動力分配統合機構30を図2の共線図に示した接続状態として駆動するから、効率よく運転されたエンジン22からの動力をトルク変換して駆動軸65に出力することができる。また、車速Vが閾値Vref1以上で閾値Vref2未満の比較的中速のときには、動力分配統合機構30をエンジン22のクランクシャフト26とモータMG1の回転軸とモータMG2の回転軸と駆動軸65とが一体の回転体として回転する接続状態として駆動するから、効率よく運転されたエンジン22からの動力を直接駆動軸65に出力することができる。さらに、車速Vが閾値Vref2以上の比較的高速のときには、動力分配統合機構30を図3の共線図に示した接続状態として駆動するから、エネルギ効率の悪い動力循環を回避することができると共に効率よく運転されたエンジン22からの動力をトルク変換して駆動軸65に出力することができる。したがって、いずれの車速Vでもエネルギ効率が高い状態で走行することができる。
実施例のハイブリッド自動車20では、車速Vに応じて動力分配統合機構30を図2の共線図の接続状態や図3の共線図の接続状態、エンジン22のクランクシャフト26とモータMG1の回転軸とモータMG2の回転軸と駆動軸65とが一体の回転体として回転する接続状態のうちから切り替えるものとしたが、こうした3つの接続状態の他に図7に例示するように他の接続状態を用いて切り替えるものとしてもよい。他の接続状態としては、クラッチC1をオンとすると共にクラッチC2〜C4をオフとしてモータMG2だけを駆動軸65に接続する接続状態、クラッチC1とクラッチC2とをオンとすると共にクラッチC3とクラッチC4とをオフとしてエンジン22のクランクシャフト26を切り離してモータMG1とモータMG2とを駆動軸65に接続する接続状態、クラッチC1とクラッチC3とをオンとすると共にクラッチC2とクラッチC4とをオフとしてモータMG1を切り離してエンジン22のクランクシャフト26とモータMG2の回転軸とを駆動軸65に直接接続する接続状態、クラッチC2とクラッチC4とをオンとする共にクラッチC1とクラッチC3とをオフとしてエンジン22のクランクシャフト26だけを駆動軸65に直接接続する接続状態がある。なお、動力分配統合機構30から駆動軸65を切り離した接続状態として、クラッチC1とクラッチC2とクラッチC4とをオフとすると共にクラッチC3をオンとしてモータMG2の回転軸とエンジン22のクランクシャフト26を直接接続する接続状態やクラッチC1とクラッチC2とをオフとすると共にクラッチC3とクラッチC4とをオンとしてモータMG1の回転軸とモータMG2の回転軸とをエンジン22のクランクシャフト26に直接接続する接続状態もある。
次に、本発明の第2の実施例としてのハイブリッド自動車120について説明する。図8は、第2実施例としての動力出力装置を搭載するハイブリッド自動車120の構成の概略を示す構成図である。図示するように、第2実施例のハイブリッド自動車120は、動力分配統合機構130の構成が異なる点を除いて第1実施例のハイブリッド自動車20と同一の構成をしている。したがって、第2実施例のハイブリッド自動車120の構成のうち第1実施例のハイブリッド自動車20と同一の構成については、同一の符号を付し、その詳細な説明は省略する。
第2実施例のハイブリッド自動車120が備える動力分配統合機構130は、図8に示すように、二つのプラネタリギヤP2,P3と4つのクラッチC5〜C8とにより構成されている。第2プラネタリギヤP2のリングギヤ132にはギヤ機構66が連結された駆動軸65が、ピニオンギヤ133を連結するキャリア134にはエンジン22のクランクシャフト26がそれぞれ接続されている。第3プラネタリギヤP3のサンギヤ136にはエンジン22のクランクシャフト26(第2プラネタリギヤP2のキャリア134)が、ピニオンギヤ138を連結するキャリア139には駆動軸65(第2プラネタリギヤP2のリングギヤ132)がそれぞれ接続されている。また、第2プラネタリギヤP2のサンギヤ131にはクラッチC5を介してモータMG1の回転軸が接続されており、第2プラネタリギヤP2のキャリア134にはクラッチC6を介してモータMG1の回転軸が接続されている。さらに、第3プラネタリギヤP3のリングギヤ137にはクラッチC8を介してモータMG2の回転軸が接続されており、第3プラネタリギヤP3のキャリア139にはクラッチC7を介してモータMG2の回転軸が接続されている。
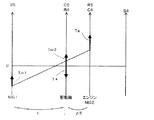
こうして構成された動力分配統合機構130は、クラッチC5とクラッチC8とをオンとすると共にクラッチC6とクラッチC7とをオフとすることにより、エンジン22からの動力を動力分配統合機構130とモータMG1とモータMG2とによりトルク変換して駆動軸65に出力することができる。この状態における動力分配統合機構130の回転要素の回転数とトルクとの力学的な関係を示す共線図の一例を図9に示す。図中、左からS2軸はモータMG1の回転数Nm1である第2プラネタリギヤP2のサンギヤ131の回転数を示し、C2,S3軸はエンジン22の回転数Neである第2プラネタリギヤP2のキャリア134と第3プラネタリギヤP3のサンギヤ136の回転数を示し、R2,C3軸は駆動軸65の回転数NdやモータMG2の回転数Nm2である第2プラネタリギヤP2のリングギヤ132と第3プラネタリギヤP3のキャリア139の回転数を示す。なお、右端のR3軸は第3プラネタリギヤP3のリングギヤ137の回転数を示すが、この接続状態ではフリーになっている。図中「ρ2」は第2プラネタリギヤP2のギヤ比(サンギヤ131の歯数/リングギヤ132の歯数)である。動力分配統合機構130の接続状態は、S2軸(第2プラネタリギヤP2のサンギヤ131)にモータMG1の回転軸、C2,S3軸(第2プラネタリギヤP2のキャリア134および第3プラネタリギヤP3のサンギヤ136)にエンジン22のクランクシャフト26、R2,C3軸(第2プラネタリギヤP2のリングギヤ132および第3プラネタリギヤP3のキャリア139)に駆動軸65とモータMG2の回転軸、がそれぞれ接続されており、R3軸(第3プラネタリギヤP3のリングギヤ137)はフリーとなっている。この接続状態は、第1実施例で説明した図2の共線図における接続状態と同じである。したがって、S2軸のモータMG1の回転数Nm1が値0のときを考えれば、エンジン22からの動力をトルクを減少して駆動軸65に出力するものとなり、逆に、S2軸のモータMG1の回転数Nm1が大きく駆動軸65の回転数が値0近傍のときを考えれば、エンジン22からの動力をトルクを増幅して駆動軸65に出力するものとなる。この結果、駆動軸65に低回転高トルクの動力を出力する際には都合のよい接続状態となるが、駆動軸65に高回転低トルクの動力を出力する際には動力循環を生じる場合もある。
また、動力分配統合機構130は、クラッチC5とクラッチC7とをオンとすると共にクラッチC6とクラッチC8とをオフとすることにより、S2軸(第2プラネタリギヤP2のサンギヤ131)にモータMG1の回転軸、C2,S3軸(第2プラネタリギヤP2のキャリア134および第3プラネタリギヤP3のサンギヤ136)にエンジン22のクランクシャフト26、R2,C3軸(プラネタリギヤP1のリングギヤ132および第3プラネタリギヤP3のキャリア139)に駆動軸65、S3軸(第3プラネタリギヤP3のリングギヤ137)にモータMG2の回転軸、をそれぞれ接続した状態とし、エンジン22からの動力を動力分配統合機構130とモータMG1とモータMG2とによりトルク変換して駆動軸65に出力する。この接続状態は、エンジン22のクランクシャフト26とモータMG1の回転軸とモータMG2の回転軸と駆動軸65の4軸についていずれか2軸の回転数が定まるとこの2軸の回転数に基づいて残余の2軸を回転させると共に4軸に入出力される動力の収支をとる、いわゆる4要素タイプとして機能するものである。この4要素タイプとして機能する際の動力分配統合機構130の回転要素の回転数とトルクとの力学的な関係を示す共線図の一例を図10に示す。図中「ρ3」は第3プラネタリギヤP3のギヤ比(サンギヤ136の歯数/リングギヤ137の歯数)である。この4要素タイプでは、中速回転領域では図9の3要素タイプなどに比してモータMG1やモータMG2からの動力を小さくすることができる結果、エネルギ効率を向上させることができる。
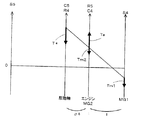
さらに、動力分配統合機構130は、クラッチC5とクラッチC8とをオフとすると共にクラッチC6とクラッチC7とをオンとすることにより、S2軸(第2プラネタリギヤP2のサンギヤ131)をフリー、C2,S3軸(第2プラネタリギヤP2のキャリア134および第3プラネタリギヤP3のサンギヤ136)にエンジン22のクランクシャフト26とモータMG1の回転軸、R2,C3軸(プラネタリギヤP1のリングギヤ132および第3プラネタリギヤP3のキャリア139)に駆動軸65、S3軸(第3プラネタリギヤP3のリングギヤ137)にモータMG2の回転軸、をそれぞれ接続した状態とし、エンジン22からの動力を動力分配統合機構130とモータMG1とモータMG2とによりトルク変換してギヤ機構66に出力する。この状態における動力分配統合機構130の回転要素の回転数とトルクとの力学的な関係を示す共線図の一例を図11に示す。この接続状態では、R3軸のモータMG2の回転数Nm2が値0のときを考えれば、エンジン22とモータMG1からの動力をトルクを増幅して駆動軸65に出力するものとなり、逆に、R3軸のモータMG2の回転数Nm2が大きくエンジン22の回転数Neが小さいときを考えれば、エンジン22とモータMG1からの動力をトルクを減少して駆動軸65に出力するものとなる。
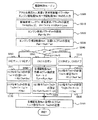
次に、こうして構成された第2実施例のハイブリッド自動車120の動作について説明する。図12は、ハイブリッド用電子制御ユニット70により実行される駆動制御ルーチンの一例を示すフローチャートである。このルーチンは、所定時間毎(例えば8msec毎)に繰り返し実行される。この駆動制御ルーチンのステップS300〜S340までの処理とステップS440の処理は、図4に例示した駆動制御ルーチンのステップS100〜S140までの処理とステップS240の処理と同一である。したがって、以下、第1実施例のハイブリッド自動車20の動作と異なる点を中心に説明する。
制御に必要なデータを入力して駆動要求トルクT*や車両要求パワーP*を設定すると共にエンジン要求パワーPe*や目標回転数Ne*,目標トルクTe*を設定して(ステップS300〜S330)、車速Vを閾値Vref1や閾値Vref2と比較する(ステップS340)。車速Vが閾値Vref1未満の比較的低速のときには、低回転高トルクの動力を出力するのに有利なものとなるようクラッチC5とクラッチC8とをオンとすると共にクラッチC6とクラッチC7とをオフとして(ステップS350)、動力分配統合機構130を図9に示した共線図における接続状態とし、エンジン22が目標回転数Ne*で回転するようモータMG1のトルク指令Tm1*をゲインを調整した式(1)により計算して設定すると共に(ステップS360)、駆動要求トルクT*が駆動軸65に出力されるようモータMG2のトルク指令Tm2*を「ρ1」に代えて「ρ2」を用いた式(2)により計算して設定し(ステップS370)、設定したエンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に送信すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40に送信して(ステップS440)、駆動制御ルーチンを終了する。こうした制御により、比較的低速時における車両のエネルギ効率を向上させることができる。
ステップS340で車速Vが閾値Vref1以上で閾値Vref2未満の比較的中速であると判定されたときには、比較的中速で効率がよくなるようクラッチC5とクラッチC7とをオンとすると共にクラッチC6とクラッチC8とをオフとして(ステップS380)、動力分配統合機構130を図10の共線図に示した4要素タイプとして機能する接続状態とし、エンジン22が目標回転数Ne*で回転するようモータMG1のトルク指令Tm1*をゲインを調整した式(1)により計算して設定すると共に(ステップS390)、駆動要求トルクT*が駆動軸65に出力されるようモータMG2のトルク指令Tm2*を式(3)により計算して設定し(ステップS400)、設定したエンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に送信すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40に送信して(ステップS440)、駆動制御ルーチンを終了する。こうした制御により、比較的中速時における車両のエネルギ効率を向上させることができる。
また、ステップS340で車速Vが閾値Vref2以上の比較的高速であると判定されたときには、クラッチC5とクラッチC8とをオフとすると共にクラッチC6とクラッチC7とをオンとして(ステップS410)、動力分配統合機構130を図11に示した共線図における接続状態とし、エンジン22が目標回転数Ne*で回転するようモータMG1のトルク指令Tm1*をゲインを調整した式(1)により計算して設定すると共に(ステップS420)、駆動要求トルクT*が駆動軸65に出力されるようモータMG2のトルク指令Tm2*を式(3)により計算して設定し(ステップS430)、設定したエンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に送信すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40に送信して(ステップS440)、駆動制御ルーチンを終了する。こうした制御により、比較的高速時における車両のエネルギ効率を向上させることができる。
以上説明した第2実施例のハイブリッド自動車120によれば、走行状態に応じた接続状態に動力分配統合機構130を切り替えて走行することができる。この結果、車両全体のエネルギ効率を向上させることができる。即ち、車速Vが閾値Vref1未満の比較的低速のときには、動力分配統合機構130を図9の共線図に示した接続状態として駆動するから、効率よく運転されたエンジン22からの動力をトルク変換して駆動軸65に出力することができる。また、車速Vが閾値Vref1以上で閾値Vref2未満の比較的中速のときには、動力分配統合機構130を図10の共線図に示した4要素タイプとして機能する接続状態として駆動するから、効率よく運転されたエンジン22からの動力をトルク変換して駆動軸65に出力することができる。さらに、車速Vが閾値Vref2以上の比較的高速のときには、動力分配統合機構130を図11の共線図に示した接続状態として駆動するから、エネルギ効率の悪い動力循環を回避することができると共に効率よく運転されたエンジン22からの動力をトルク変換して駆動軸65に出力することができる。したがって、いずれの車速Vでもエネルギ効率が高い状態で走行することができる。
第2実施例のハイブリッド自動車120では、車速Vに応じて動力分配統合機構130を図9の共線図の接続状態や図10の共線図の接続状態、図11の共線図の接続状態のうちから切り替えるものとしたが、こうした3つの接続状態の他に図13に例示するように他の接続状態を用いて切り替えるものとしてもよい。他の接続状態としては、クラッチC5とクラッチC6とをオンとすると共にクラッチC7とクラッチC8とをオフとしてモータMG1の回転軸とエンジン22のクランクシャフト26を駆動軸65に直接接続する接続状態、クラッチC5とクラッチC6とをオフとすると共にクラッチC7とクラッチC8とをオンとしてモータMG2の回転軸とエンジン22のクランクシャフト26とを駆動軸65に直接接続する接続状態、クラッチC5〜C8のいずれもをオンとしてエンジン22のクランクシャフト26とモータMG1の回転軸とモータMG2の回転軸とを駆動軸65に直接接続する接続状態がある。
次に、本発明の第3の実施例としてのハイブリッド自動車220について説明する。図14は、第3実施例としての動力出力装置を搭載するハイブリッド自動車220の構成の概略を示す構成図である。図示するように、第3実施例のハイブリッド自動車220は、動力分配統合機構230の構成が異なる点を除いて第1実施例のハイブリッド自動車20と同一の構成をしている。したがって、第3実施例のハイブリッド自動車220の構成のうち第1実施例のハイブリッド自動車20と同一の構成については、同一の符号を付し、その詳細な説明は省略する。
第3実施例のハイブリッド自動車220が備える動力分配統合機構230は、図14に示すように、二つのプラネタリギヤP4,P5と二つのクラッチC9,C10とにより構成されている。第4プラネタリギヤP4のリングギヤ232にはギヤ機構66が連結された駆動軸65が、ピニオンギヤ233を連結するキャリア234にはエンジン22のクランクシャフト26がそれぞれ接続されている。第5プラネタリギヤP5のリングギヤ237にはエンジン22のクランクシャフト26(第4プラネタリギヤP4のキャリア234)が、ピニオンギヤ238を連結するキャリア239には駆動軸65(第4プラネタリギヤP4のリングギヤ232)がそれぞれ接続されている。また、第4プラネタリギヤP4のサンギヤ231にはクラッチC9を介してモータMG1の回転軸が接続されており、第5プラネタリギヤP5のサンギヤ236にはクラッチC10を介してモータMG1の回転軸が接続されている。
こうして構成された動力分配統合機構230は、クラッチC9をオンとすると共にクラッチC10をオフとすることにより、エンジン22からの動力を動力分配統合機構230とモータMG1とモータMG2とによりトルク変換して駆動軸65に出力することができる。この状態における動力分配統合機構230の回転要素の回転数とトルクとの力学的な関係を示す共線図の一例を図15に示す。図中、左からS5軸はモータMG1の回転数Nm1である第5プラネタリギヤP5のサンギヤ236の回転数を示し、R4,C5軸は駆動軸65の回転数Ndである第4プラネタリギヤP4のリングギヤ232と第5プラネタリギヤP5のキャリア239の回転数を示し、C4,R5軸はエンジン22の回転数NeやモータMG2の回転数Nm2である第4プラネタリギヤP4のキャリア234と第5プラネタリギヤP5のリングギヤ237の回転数を示す。なお、右端のS4軸は第4プラネタリギヤP4のサンギヤ231の回転数を示すが、この接続状態ではフリーになっている。なお、図中「ρ5」は第5プラネタリギヤP5のギヤ比(サンギヤ236の歯数/リングギヤ237の歯数)である。動力分配統合機構230の接続状態は、S5軸(第5プラネタリギヤP5のサンギヤ236)にモータMG1の回転軸、R4,C5軸(第4プラネタリギヤP4のキャリア234および第5プラネタリギヤP5のリングギヤ237)に駆動軸65、C4,R5軸(第4プラネタリギヤP4のキャリア234および第5プラネタリギヤP5のリングギヤ237)にエンジン22のクランクシャフト26とモータMG2の回転軸、がそれぞれ接続されており、S4軸(第4プラネタリギヤP4のサンギヤ231)はフリーとなっている。この接続状態は、第1実施例で説明した図3の共線図における接続状態と同一である。したがって、この接続状態では、S5軸のモータMG1の回転数Nm1が値0のときを考えれば、エンジン22からの動力をトルクを増幅して駆動軸65に出力するものとなり、逆に、S5軸のモータMG1の回転数Nm1が大きくエンジン22の回転数Neが小さいときを考えれば、エンジン22からの動力をトルクを減少して駆動軸65に出力するものとなる。
また、動力分配統合機構230は、クラッチC9,C10の双方をオンとすることにより、エンジン22のクランクシャフト26とモータMG1の回転軸とモータMG2の回転軸と駆動軸65とを一体の回転体とすることができる。上述したように、このときには、エンジン22からの動力を直接駆動軸65に出力することができると共にこれに加えてモータMG1やモータMG2から駆動軸65への動力の入出力も行なうことができる。
さらに、動力分配統合機構230は、クラッチC9をオフとすると共にクラッチC10をオンとすることにより、S5軸(第5プラネタリギヤP5のサンギヤ236)をフリー、R4,C5軸(第4プラネタリギヤP4のリングギヤ232および第5プラネタリギヤP5のキャリア239)に駆動軸65、C4,R5軸(第4プラネタリギヤP4のキャリア234および第5プラネタリギヤP5のリングギヤ237)にエンジン22のクランクシャフト26とモータMG2の回転軸、S4軸(第4プラネタリギヤP4のサンギヤ231)にモータMG2の回転軸、をそれぞれ接続した状態とし、エンジン22からの動力を動力分配統合機構230とモータMG1とモータMG2とによりトルク変換して駆動軸65に出力する。この状態における動力分配統合機構230の回転要素の回転数とトルクとの力学的な関係を示す共線図の一例を図16に示す。図中「ρ4」は第4プラネタリギヤP4のギヤ比(サンギヤ231の歯数/リングギヤ232の歯数)である。この接続状態は、第1実施例で説明した図2の共線図における接続状態におけるモータMG2の回転軸をエンジン22のクランクシャフト26から切り離して駆動軸65に接続したものとなる。したがって、この接続状態では、S4軸のモータMG1の回転数Nm1が値0のときを考えれば、エンジン22からの動力をトルクを減少して駆動軸65に出力するものとなり、逆に、S4軸のモータMG1の回転数Nm1が大きくエンジン22の回転数Neが小さいときを考えれば、エンジン22からの動力をトルクを増幅して駆動軸65に出力するものとなる。ただし、図2の共線図の接続状態の動力分配統合機構30と異なる点として、モータMG2がエンジン22のクランクシャフト26に接続されているから、駆動軸65が高回転しているときに生じ得る動力循環は動力分配統合機構230のこの接続状態では生じない。このため、駆動軸65に高回転低トルクの動力を出力する際には都合のよい接続状態となる。
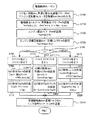
次に、こうして構成された第3実施例のハイブリッド自動車220の動作について説明する。図17は、ハイブリッド用電子制御ユニット70により実行される駆動制御ルーチンの一例を示すフローチャートである。このルーチンは、所定時間毎(例えば8msec毎)に繰り返し実行される。この駆動制御ルーチンのステップS500〜S540までの処理とステップS640の処理は、図4に例示した駆動制御ルーチンのステップS100〜S140までの処理とステップS240の処理と同一である。したがって、以下、第1実施例のハイブリッド自動車20の動作と異なる点を中心に説明する。
制御に必要なデータを入力して駆動要求トルクT*や車両要求パワーP*を設定すると共にエンジン要求パワーPe*や目標回転数Ne*,目標トルクTe*を設定して(ステップS500〜S530)、車速Vを閾値Vref1や閾値Vref2と比較する(ステップS540)。車速Vが閾値Vref1未満の比較的低速のときには、低回転高トルクの動力を出力するのに有利なものとなるようクラッチC9をオンとすると共にクラッチC10をオフとして(ステップS550)、動力分配統合機構230を図15に示した共線図における接続状態とし、エンジン22が目標回転数Ne*で回転するようモータMG1のトルク指令Tm1*をゲインを調整した式(1)により計算して設定すると共に(ステップS560)、駆動要求トルクT*が駆動軸65に出力されるようモータMG2のトルク指令Tm2*を式(3)により計算して設定し(ステップS570)、設定したエンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に送信すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40に送信して(ステップS640)、駆動制御ルーチンを終了する。こうした制御により、比較的低速時における車両のエネルギ効率を向上させることができる。
ステップS540で車速Vが閾値Vref1以上で閾値Vref2未満の比較的中速であると判定されたときには、比較的中速で効率がよくなるようクラッチC9とクラッチC10とをオンとして(ステップS580)、動力分配統合機構230をエンジン22のクランクシャフト26とモータMG1の回転軸とモータMG2の回転軸と駆動軸65とが一体の回転体として回転する接続状態とし、エンジン22の目標回転数Ne*に駆動軸65の回転数Nd(k・V)を設定すると共にエンジン要求パワーPe*を目標回転数Ne*で割って目標トルクTe*を設定し(ステップS590)、駆動軸65に駆動要求トルクT*が出力されるようモータMG1,MG2のトルク指令Tm1*,Tm2*を設定し(ステップS600)、設定したエンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に送信すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40に送信して(ステップS640)、駆動制御ルーチンを終了する。モータMG1,MG2のトルク指令Tm1*,Tm2*については、図4の駆動制御ルーチンのステップS200で説明したように、目標トルクTe*とを含めた和が駆動要求トルクT*となれば如何なる配分により設定してもよい。こうした制御により、比較的中速時における車両のエネルギ効率を向上させることができる。
また、ステップS540で車速Vが閾値Vref2以上の比較的高速であると判定されたときには、クラッチC9をオフとすると共にクラッチC10をオンとして(ステップS610)、動力分配統合機構230を図16に示した共線図における接続状態とし、エンジン22が目標回転数Ne*で回転するようモータMG1のトルク指令Tm1*をゲインを調整した式(1)により計算して設定すると共に(ステップS620)、駆動要求トルクT*が駆動軸65に出力されるようモータMG2のトルク指令Tm2*を式(3)により計算して設定し(ステップS630)、設定したエンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に送信すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40に送信して(ステップS640)、駆動制御ルーチンを終了する。こうした制御により、比較的高速時における車両のエネルギ効率を向上させることができる。
以上説明した第3実施例のハイブリッド自動車220によれば、走行状態に応じた接続状態に動力分配統合機構230を切り替えて走行することができる。この結果、車両全体のエネルギ効率を向上させることができる。即ち、車速Vが閾値Vref1未満の比較的低速のときには、動力分配統合機構230を図15の共線図に示した接続状態として駆動するから、効率よく運転されたエンジン22からの動力をトルク変換して駆動軸65に出力することができる。また、車速Vが閾値Vref1以上で閾値Vref2未満の比較的中速のときには、動力分配統合機構230をエンジン22のクランクシャフト26とモータMG1の回転軸とモータMG2の回転軸と駆動軸65とが一体の回転体となる接続状態として駆動するから、効率よく運転されたエンジン22からの動力を直接駆動軸65に出力することができる。さらに、車速Vが閾値Vref2以上の比較的高速のときには、動力分配統合機構230を図16の共線図に示した接続状態として駆動するから、効率よく運転されたエンジン22からの動力をトルク変換して駆動軸65に出力することができる。したがって、いずれの車速Vでもエネルギ効率が高い状態で走行することができる。
次に、本発明の第4の実施例としてのハイブリッド自動車320について説明する。図18は、第4実施例としての動力出力装置を搭載するハイブリッド自動車320の構成の概略を示す構成図である。図示するように、第4実施例のハイブリッド自動車320は、動力分配統合機構330の構成が異なる点を除いて第1実施例のハイブリッド自動車20と同一の構成をしている。したがって、第4実施例のハイブリッド自動車320の構成のうち第1実施例のハイブリッド自動車20と同一の構成については、同一の符号を付し、その詳細な説明は省略する。
第4実施例のハイブリッド自動車320が備える動力分配統合機構330は、図18に示すように、二つのプラネタリギヤP6,P7と四つのクラッチC11〜C14とにより構成されている。第6プラネタリギヤP6のリングギヤ332にはギヤ機構66が連結された駆動軸65が、ピニオンギヤ333を連結するキャリア334にはエンジン22のクランクシャフト26がそれぞれ接続されている。第7プラネタリギヤP7のリングギヤ337にはエンジン22のクランクシャフト26(第6プラネタリギヤP6のキャリア334)が、ピニオンギヤ338を連結するキャリア339には駆動軸65(第6プラネタリギヤP6のリングギヤ332)がそれぞれ接続されている。また、第6プラネタリギヤP6のサンギヤ331にはクラッチC11を介してモータMG1の回転軸が接続されており、第6プラネタリギヤP6のリングギヤ332(第7プラネタリギヤP7のキャリア339)にはクラッチC14を介してモータMG2の回転軸が接続されている。また、第6プラネタリギヤP6のキャリア334(第7プラネタリギヤP7のリングギヤ337)にはクラッチC13を介してモータMG2の回転軸が接続されており、第7プラネタリギヤP7のサンギヤ336にはクラッチC12を介してモータMG1の回転軸が接続されている。
こうして構成された動力分配統合機構330は、クラッチC11とクラッチC14をオンとすると共にクラッチC12とクラッチC13とをオフとすることにより、エンジン22からの動力を動力分配統合機構330とモータMG1とモータMG2とによりトルク変換して駆動軸65に出力することができる。この状態における動力分配統合機構330の回転要素の回転数とトルクとの力学的な関係を示す共線図の一例を図19に示す。図中、左からS7軸はモータMG1の回転数Nm1である第7プラネタリギヤP7のサンギヤ336の回転数を示し、R6,C7軸は駆動軸65の回転数NdやモータMG2の回転数Nm2である第6プラネタリギヤP6のリングギヤ332と第7プラネタリギヤP7のキャリア339の回転数を示し、C6,R7軸はエンジン22の回転数Neである第6プラネタリギヤP6のキャリア334と第7プラネタリギヤP7のリングギヤ337の回転数を示す。なお、右端のS6軸は第6プラネタリギヤP6のサンギヤ331の回転数を示すが、この接続状態ではフリーになっている。なお、図中「ρ7」は第7プラネタリギヤP7のギヤ比(サンギヤ336の歯数/リングギヤ337の歯数)である。動力分配統合機構330の接続状態は、S7軸(第7プラネタリギヤP7のサンギヤ336)にモータMG1の回転軸、R6,C7軸(第6プラネタリギヤP6のキャリア334および第7プラネタリギヤP7のリングギヤ337)に駆動軸65とモータMG2の回転軸、C6,R7軸(第6プラネタリギヤP6のキャリア334および第7プラネタリギヤP7のリングギヤ337)にエンジン22のクランクシャフト26、がそれぞれ接続されており、S6軸(第6プラネタリギヤP6のサンギヤ331)はフリーとなっている。この接続状態は、第1実施例で説明した図3の共線図における接続状態におけるモータMG2の回転軸をエンジン22のクランクシャフト26から切り離して駆動軸65に接続したものとなる。したがって、この接続状態では、S7軸のモータMG1の回転数Nm1が値0のときを考えれば、エンジン22からの動力をトルクを増幅して駆動軸65に出力するものとなり、逆に、S7軸のモータMG1の回転数Nm1が大きくエンジン22の回転数Neが小さいときを考えれば、エンジン22からの動力をトルクを減少して駆動軸65に出力するものとなる。図3の共線図における接続状態に比して、モータMG2が駆動軸65に直接接続されているから、モータMG2からの動力を直接駆動軸65に出力することができる。このため、駆動軸65に低回転高トルクの動力を出力する際には特に都合のよい接続状態となる。
また、動力分配統合機構330は、クラッチC11〜C14のうちいずれか3つのクラッチをオンとすることにより、エンジン22のクランクシャフト26とモータMG1の回転軸とモータMG2の回転軸と駆動軸65とを一体の回転体とすることができる。上述したように、このときには、エンジン22からの動力を直接駆動軸65に出力することができると共にこれに加えてモータMG1やモータMG2から駆動軸65への動力の入出力も行なうことができる。
さらに、動力分配統合機構330は、クラッチC11とクラッチC14とをオフとすると共にクラッチC12とクラッチC13とをオンとすることにより、S7軸(第7プラネタリギヤP7のサンギヤ336)をフリー、R6,C7軸(第6プラネタリギヤP6のリングギヤ332および第7プラネタリギヤP7のキャリア339)に駆動軸65、C6,R7軸(第6プラネタリギヤP6のキャリア334および第7プラネタリギヤP7のリングギヤ337)にエンジン22のクランクシャフト26とモータMG2の回転軸、S6軸(第6プラネタリギヤP6のサンギヤ331)にモータMG2の回転軸、をそれぞれ接続した状態とし、エンジン22からの動力を動力分配統合機構330とモータMG1とモータMG2とによりトルク変換して駆動軸65に出力する。この状態における動力分配統合機構330の回転要素の回転数とトルクとの力学的な関係を示す共線図の一例を図20に示す。図中「ρ6」は第6プラネタリギヤP6のギヤ比(サンギヤ331の歯数/リングギヤ332の歯数)である。この接続状態は、第3実施例で説明した図16の共線図における接続状態と同一である。したがって、この接続状態では、S4軸のモータMG1の回転数Nm1が値0のときを考えれば、エンジン22からの動力をトルクを減少して駆動軸65に出力するものとなり、逆に、S4軸のモータMG1の回転数Nm1が大きくエンジン22の回転数Neが小さいときを考えれば、エンジン22からの動力をトルクを増幅して駆動軸65に出力するものとなる。また、モータMG2がエンジン22のクランクシャフト26に接続されているから、駆動軸65が高回転しているときに生じ得る動力循環は動力分配統合機構330のこの接続状態では生じない。このため、駆動軸65に高回転低トルクの動力を出力する際には都合のよい接続状態となる。
次に、こうして構成された第4実施例のハイブリッド自動車320の動作について説明する。図21は、ハイブリッド用電子制御ユニット70により実行される駆動制御ルーチンの一例を示すフローチャートである。このルーチンは、所定時間毎(例えば8msec毎)に繰り返し実行される。この駆動制御ルーチンのステップS700〜S740までの処理とステップS840の処理は、図4に例示した駆動制御ルーチンのステップS100〜S140までの処理とステップS240の処理と同一である。したがって、以下、第1実施例のハイブリッド自動車20の動作と異なる点を中心に説明する。
制御に必要なデータを入力して駆動要求トルクT*や車両要求パワーP*を設定すると共にエンジン要求パワーPe*や目標回転数Ne*,目標トルクTe*を設定して(ステップS700〜S730)、車速Vを閾値Vref1や閾値Vref2と比較する(ステップS740)。車速Vが閾値Vref1未満の比較的低速のときには、低回転高トルクの動力を出力するのに有利なものとなるようクラッチC11とクラッチC14とをオンとすると共にクラッチC12とクラッチC13とをオフとして(ステップS750)、動力分配統合機構230を図19に示した共線図における接続状態とし、エンジン22が目標回転数Ne*で回転するようモータMG1のトルク指令Tm1*をゲインを調整した式(1)により計算して設定すると共に(ステップS760)、駆動要求トルクT*が駆動軸65に出力されるようモータMG2のトルク指令Tm2*を式(3)により計算して設定し(ステップS770)、設定したエンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に送信すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40に送信して(ステップS840)、駆動制御ルーチンを終了する。こうした制御により、比較的低速時における車両のエネルギ効率を向上させることができる。
ステップS740で車速Vが閾値Vref1以上で閾値Vref2未満の比較的中速であると判定されたときには、比較的中速で効率がよくなるようクラッチC11〜C14をオンとして(ステップS780)、動力分配統合機構230をエンジン22のクランクシャフト26とモータMG1の回転軸とモータMG2の回転軸と駆動軸65とが一体の回転体として回転する接続状態とし、エンジン22の目標回転数Ne*に駆動軸65の回転数Nd(k・V)を設定すると共にエンジン要求パワーPe*を目標回転数Ne*で割って目標トルクTe*を設定し(ステップS790)、駆動軸65に駆動要求トルクT*が出力されるようモータMG1,MG2のトルク指令Tm1*,Tm2*を設定し(ステップS800)、設定したエンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に送信すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40に送信して(ステップS840)、駆動制御ルーチンを終了する。モータMG1,MG2のトルク指令Tm1*,Tm2*については、図4の駆動制御ルーチンのステップS200で説明したように、目標トルクTe*とを含めた和が駆動要求トルクT*となれば如何なる配分により設定してもよい。こうした制御により、比較的中速時における車両のエネルギ効率を向上させることができる。
また、ステップS740で車速Vが閾値Vref2以上の比較的高速であると判定されたときには、クラッチC11とクラッチC14とをオフとすると共にクラッチC12とクラッチC13とをオンとして(ステップS810)、動力分配統合機構230を図20に示した共線図における接続状態とし、エンジン22が目標回転数Ne*で回転するようモータMG1のトルク指令Tm1*をゲインを調整した式(1)により計算して設定すると共に(ステップS820)、駆動要求トルクT*が駆動軸65に出力されるようモータMG2のトルク指令Tm2*を式(3)により計算して設定し(ステップS830)、設定したエンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に送信すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40に送信して(ステップS840)、駆動制御ルーチンを終了する。こうした制御により、比較的高速時における車両のエネルギ効率を向上させることができる。
以上説明した第4実施例のハイブリッド自動車320によれば、走行状態に応じた接続状態に動力分配統合機構330を切り替えて走行することができる。この結果、車両全体のエネルギ効率を向上させることができる。即ち、車速Vが閾値Vref1未満の比較的低速のときには、動力分配統合機構330を図19の共線図に示した接続状態として駆動するから、効率よく運転されたエンジン22からの動力をトルク変換して駆動軸65に出力することができる。また、車速Vが閾値Vref1以上で閾値Vref2未満の比較的中速のときには、動力分配統合機構330をエンジン22のクランクシャフト26とモータMG1の回転軸とモータMG2の回転軸と駆動軸65とが一体の回転体となる接続状態として駆動するから、効率よく運転されたエンジン22からの動力を直接駆動軸65に出力することができる。さらに、車速Vが閾値Vref2以上の比較的高速のときには、動力分配統合機構330を図20の共線図に示した接続状態として駆動するから、効率よく運転されたエンジン22からの動力をトルク変換して駆動軸65に出力することができる。したがって、いずれの車速Vでもエネルギ効率が高い状態で走行することができる。
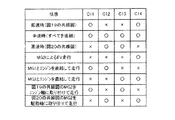
第4実施例のハイブリッド自動車320では、車速Vに応じて動力分配統合機構330を図19の共線図の接続状態や図20の共線図の接続状態、エンジン22のクランクシャフト26とモータMG1の回転軸とモータMG2の回転軸と駆動軸65とが一体の回転体として回転する接続状態のうちから切り替えるものとしたが、こうした3つの接続状態の他に図22に例示するように他の接続状態を用いて切り替えるものとしてもよい。他の接続状態としては、クラッチC11〜C13をオフとすると共にクラッチC14をオンとしてモータMG2だけを駆動軸65に接続する接続状態、クラッチC11とクラッチC12とをオンとすると共にクラッチC13とクラッチC14とをオフとしてエンジン22のクランクシャフト26とモータMG1の回転軸とを駆動軸65に直接接続する接続状態、クラッチC11とクラッチC12とをオフとすると共にクラッチC13とクラッチC14とをオンとしてエンジン22のクランクシャフト26とモータMG2の回転軸とを駆動軸65に直接接続する接続状態、クラッチC11とクラッチC13とをオンとすると共にクラッチC12とクラッチC14とをオフとして図19の共線図の接続状態におけるモータMG2を駆動軸65から切り離してエンジン22のクランクシャフト26に接続した接続状態、クラッチC11とクラッチC13とをオフとすると共にクラッチC12とクラッチC14とをオンとして図20の共線図の接続状態におけるモータMG2をエンジン22のクランクシャフト26から切り離して駆動軸65に接続した接続状態がある。
上述の第1ないし第4の実施例のハイブリッド自動車20,120,220,320では、シングルピニオンのプラネタリギヤを用いて動力分配統合機構30,130,230,330を構成したが、ダブルピニオンのプラネタリギヤを用いて動力分配統合機構30,130,230,330を構成するものとしてもよい。
また、第1ないし第4に実施例のハイブリッド自動車20,120,220,320では、車速Vを閾値Vref1および閾値Vref2と比較し、車速Vを3段階に区分して動力分配統合機構30,130,230,330の接続状態を切り替えるものとしたが、車速Vを4段階以上に区分して動力分配統合機構30,130,230,330の接続状態を切り替えるものとしてもよい。また、ハイブリッド自動車20,120,220,320のエネルギ効率が高くなるように動力分配統合機構30,130,230,330の接続状態を切り替えればよいから、車速V以外のパラメータを用いて動力分配統合機構30,130,230,330の接続状態を切り替えるものとしてもよい。
さらに、第1ないし第4の実施例のハイブリッド自動車20,120,220,320では、プラネタリギヤを用いて動力分配統合機構30,130,230,330を構成したが、モータMG1とモータMG2のうち一方のモータの回転数が値0のときにエンジン22からの動力をトルクを減少して駆動軸65に出力することができる接続状態とモータMG1とモータMG2のうち一方のモータの回転数が値0のときにエンジン22からの動力をトルクを増幅して駆動軸65に出力することができる接続状態とを切り替えることができるものであれば、プラネタリギヤを用いずに動力分配統合機構30,130,230,330を構成してもよい。
第1ないし第4の実施例では、本発明をハイブリッド自動車20,120,220,320として説明したが、駆動軸65までの動力出力装置として適用してもよいし、エンジン22やモータMG1やモータMG2などを備えない動力伝達装置として適用してもよい。この場合、動力出力装置や動力伝達装置は、自動車以外の列車などの車両に搭載されるものとしてもよいし、船舶や航空機に搭載されるものとしてもよい。また、建設機械などに組み込まれるものとしても構わない。
以上、本発明を実施するための最良の形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
本発明の一実施例としての動力出力装置を搭載するハイブリッド自動車20の構成の概略を示す構成図である。
クラッチC1,C4がオンでクラッチC2,C3がオフの状態の動力分配統合機構30の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
クラッチC1,C4がオフでクラッチC2,C3がオンの状態の動力分配統合機構30の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
ハイブリッド用電子制御ユニット70により実行される駆動制御ルーチンの一例を示すフローチャートである。
駆動要求トルク設定用マップの一例を示す説明図である。
エンジン22の動作ラインの一例と目標回転数Ne*および目標トルクTe*を設定する様子を示す説明図である。
動力分配統合機構30の接続状態の一覧を示す説明図である。
第2実施例の動力出力装置を搭載するハイブリッド自動車120の構成の概略を示す構成図である。
クラッチC5,C8がオンでクラッチC6,C7がオフの状態の動力分配統合機構130の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
クラッチC5,C7がオンでクラッチC6,C8がオフの状態の動力分配統合機構130の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
クラッチC5,C8がオフでクラッチC6,C7がオンの状態の動力分配統合機構130の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
第2実施例のハイブリッド用電子制御ユニット70により実行される駆動制御ルーチンの一例を示すフローチャートである。
動力分配統合機構130の接続状態の一覧を示す説明図である。
第3実施例の動力出力装置を搭載するハイブリッド自動車220の構成の概略を示す構成図である。
クラッチC9がオンでクラッチC10がオフの状態の動力分配統合機構230の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
クラッチC9がオフでクラッチC10がオンの状態の動力分配統合機構230の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
第3実施例のハイブリッド用電子制御ユニット70により実行される駆動制御ルーチンの一例を示すフローチャートである。
第4実施例の動力出力装置を搭載するハイブリッド自動車320の構成の概略を示す構成図である。
クラッチC11,C14がオンでクラッチC12,C13がオフの状態の動力分配統合機構330の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
クラッチC11,C14がオフでクラッチC12,C13がオンの状態の動力分配統合機構330の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
第4実施例のハイブリッド用電子制御ユニット70により実行される駆動制御ルーチンの一例を示すフローチャートである。
動力分配統合機構330の接続状態の一覧を示す説明図である。
符号の説明
20,120,220,320 ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、28 ダンパ、30,130,230,330 動力分配統合機構、31,131,136,231,236,331,336 サンギヤ、32,132,137,232,237,332,337 リングギヤ、33,133,138,233,238,333,3338 ピニオンギヤ、34,134,139,234,239,334,339 キャリア、50 モータ用電子制御ユニット(モータECU)、51,52 インバータ、53,54 回転位置検出センサ、60 バッテリ、62 バッテリ用電子制御ユニット(バッテリECU)、64 電力ライン、65 駆動軸、66 ギヤ機構、68 デファレンシャルギヤ、69a,69b 駆動輪、70 ハイブリッド用電子制御ユニット、72 CPU、74 ROM、76 RAM、80 イグニッションスイッチ、81 シフトレバー、82 シフトポジションセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、86 ブレーキペダルポジションセンサ、88 車速センサ、P1〜P7 プラネタリギヤ、MG1,MG2 モータ、C1〜C14 クラッチ。