JP2005308209A - 取外し可能な接合連結部及び対応する連結方法 - Google Patents
取外し可能な接合連結部及び対応する連結方法 Download PDFInfo
- Publication number
- JP2005308209A JP2005308209A JP2005060090A JP2005060090A JP2005308209A JP 2005308209 A JP2005308209 A JP 2005308209A JP 2005060090 A JP2005060090 A JP 2005060090A JP 2005060090 A JP2005060090 A JP 2005060090A JP 2005308209 A JP2005308209 A JP 2005308209A
- Authority
- JP
- Japan
- Prior art keywords
- elements
- connection
- axis
- along
- removably
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L25/00—Construction or details of pipe joints not provided for in, or of interest apart from, groups F16L13/00 - F16L23/00
- F16L25/01—Construction or details of pipe joints not provided for in, or of interest apart from, groups F16L13/00 - F16L23/00 specially adapted for realising electrical conduction between the two pipe ends of the joint or between parts thereof
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L2201/00—Special arrangements for pipe couplings
- F16L2201/20—Safety or protective couplings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L2201/00—Special arrangements for pipe couplings
- F16L2201/60—Identification or marking
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R13/00—Details of coupling devices of the kinds covered by groups H01R12/70 or H01R24/00 - H01R33/00
- H01R13/64—Means for preventing incorrect coupling
- H01R13/645—Means for preventing incorrect coupling by exchangeable elements on case or base
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Quick-Acting Or Multi-Walled Pipe Joints (AREA)
- Flanged Joints, Insulating Joints, And Other Joints (AREA)
- Mutual Connection Of Rods And Tubes (AREA)
Abstract
【課題】管類を取り外し可能に接合するための連結部及び接合方法を提供する。
【解決手段】連結部は、嵌合軸線に沿って互いに嵌合するように適合された2つの要素及び補間的な形の2つの要素の対に適合され2つの要素によって形成された間違いのない手段から構成された2つの管等を取外し可能に接合するために連結部から構成される。これらの連結要素に関連するストックの管理を簡単にする一方で、嵌合される連結要素を容易に操作するため、及び比較的鈍感なロボットによってこのような操作を容易にするため、この連結部は、間違いのない手段の少なくとも一部が取外し可能にかつ形成可能に2つの要素に連結されてこれらの要素の嵌合中に協働する前に互いに2つの要素を角で位置決めするように適合され2つの要素によって形成された2つの要素を角で示すための手段をさらに有する。
【選択図】 図1
【解決手段】連結部は、嵌合軸線に沿って互いに嵌合するように適合された2つの要素及び補間的な形の2つの要素の対に適合され2つの要素によって形成された間違いのない手段から構成された2つの管等を取外し可能に接合するために連結部から構成される。これらの連結要素に関連するストックの管理を簡単にする一方で、嵌合される連結要素を容易に操作するため、及び比較的鈍感なロボットによってこのような操作を容易にするため、この連結部は、間違いのない手段の少なくとも一部が取外し可能にかつ形成可能に2つの要素に連結されてこれらの要素の嵌合中に協働する前に互いに2つの要素を角で位置決めするように適合され2つの要素によって形成された2つの要素を角で示すための手段をさらに有する。
【選択図】 図1
Description
本発明は、管又は管類を取外し可能に接合するための連結部及びこのような管を接合するための方法に関する。
機械又は一般に装置に流体及び/又は空気を供給してこれらの装置を作動又は制御することが知られている。このような供給は、連結位置で割り込まれた管によって実施され、取外し可能な再組み立て及び装置の一時的な供給を可能にする。
多数の接合点から成る装置に対しては、実際に全体に同じ寸法を有する複数の連結部に対して連続して使用されることが一般に行われている。しかしながら、流体及び/又は装置に給電する電気を混合させないことが重要である。この混合は、装置の損傷及び/又は不正確な機能を招く。この理由から、容易に記憶されるアルファベット順の符号及び/又は色によって供給連結部に印を付けることが知られている。
もう1つの解決手段では、与えられた連結部の2つの要素が互いに嵌合する形の補間によって対に適合された暗号化手段を有する同じ装置に異なる連結部を備える。このような暗号化手段の例が、ドイツ連邦共和国特許発明第 1187435号明細書中に記されている。この明細書では、関連する連結部内で循環させようとする流体の特性に応じて、流体に関連する状態に応じて、この連結部の一方の要素が、この連結部の嵌合方向に対して横の方向に延在している複数のキャッチを有する。その一方で他方の要素は、これらのキャッチに実際に補間的にこれに対応する複数のスロットを有する。その結果、2つの要素を端部ごとに適切に位置決めすることを可能にする。2つの対でない要素を互いに嵌合させようとする場合、第1要素の少なくとも1つのキャッチが、対応するスロット内に差し込むことができない危険にさらされる。その結果、正確な接合を阻止する。
これらのキャッチ及びスロットは、連結中の間違いを阻止するのに有効であるものの、各連結部の各要素をカスタム機械加工する必要があるので、高価で作りにくい欠点を呈する。さらに、これらの要素の1つが損傷する場合、これらの連結部のユーザは、各連結部の各要素に対して少なくとも1つの予備を入手する必要がある。このことは、要素を大量に備蓄することを要する。
暗号化手段のもう1つの例は、ドイツ連邦共和国特許出願公開第 2646063号明細書中に記されている。この明細書では、キャッチ及びスロットを暗号化する機構が、ドイツ連邦共和国特許発明第 1187435号明細書の機構を実質的に同じである。角のある割り出しを形成する単一のリブ/溝の対が、キャッチ及びスロットに対応する。連結部の2つの要素が互いに嵌合する。2つの連結部を互いに嵌合させるのが困難な場合、操作者は、彼が2つの対でない要素を連結使用しようとしているのかどうか知らないか又は2つの対の連結部を操作していても彼がこれらの要素を角によって適切に位置決めするので、このドイツ連邦共和国特許出願公開第 2646063号明細書によって提唱されている連結部は、使用に制約があることを実証している。
さらに、放射性廃棄物を再処理するか又は原子力発電所を解体する場所のような危険な環境内に位置する装置に対しては、連結部のこれらの操作が、ロボットによって一般に遠隔で実施される。これらのロボットは、連結される要素を操作しカメラで撮影しこれらのロボットの移動の鮮明な画像を操作者に多少とも送信する。これらの条件下では、操作者が異なる連結部の対の要素を誤って逆に危険が非常に高い。さらに、ロボットは、これらのロボットを操作することによって生じる機械的に十分な耐性を示さないので、ドイツ連邦共和国特許発明第 1187435号明細書中で提唱されているような暗号化手段は、操作の動作の観点から適さない。その結果、コスト及び備蓄の問題を増幅させる。さらに、ロボットを操作する遅さ及び感知の不足及び劣った視覚性に起因して、上述したドイツ連邦共和国特許出願公開第 2646063号明細書の連結要素を使用する困難さがさらに大きくなる。
ドイツ連邦共和国特許発明第 1187435号明細書
ドイツ連邦共和国特許出願公開第 2646063号明細書
本発明の課題は、可能な接合を容易にする一方でこの連結部の要素の不正確な接合を回避することによって関連する備蓄を抑え要求を満たす取り外し可能な連結部を提供することにある。さらに本発明は、ロボット等による操作に関してより便利な使用及び連結部のより強い耐性を保証することも有益に提供する。
この課題は、嵌合軸線に沿って互いに嵌合する2つの要素及び補間する形によって2つの要素の対に適合された2つの要素から成る間違いのない手段から構成された2つの管を取外し可能に接合するための連結部において、この連結部は、2つの要素を角で示し、これらの2つの要素を間違いのない手段の前に相対的に角で位置決めし、これらの2つの要素の少なくとも一部をこれらの要素の嵌合中に取外し可能に協働させる手段をさらに有することによって解決される。
要素の数及び/又は位置が操作者によって自由に選択されるこれらの間違いのない手段のために、与えられる連結部の2つの要素は、現場で又は配達時に対にされる。換言すれば、操作者は、現場で保守部品を僅かに確保するだけで済み、2つの標準連結要素を前もって機械加工で希望通りに大量生産することを可能にする。同様に供給者は、連結要素のストックを削減する必要がある。このとき供給者は、間違いのない手段によって要求されるときに容易にかつ迅速に製造する。ロボットによって連結要素を操作する場合、間違えのない手段が作動する前に、連結要素は、互いに容易に角で位置決めされる。操作者が2つの要素による間違えのない手段の一部の形の補間を検査する時に、その操作者は、これらの2つの要素が指標手段によって前もって角で正確に配置されることを確認する。
別々に又は技術的に可能な全ての組合わせをとるこの連結部のその他の特徴によれば:−間違いのない手段は:
−2つの要素のうちの第1要素に取外し可能に連結される少なくとも1つの要素を有し、−この各要素の通過領域が、これらの要素の嵌合中に第2要素によって形成され、
−第2要素に取外し可能に連結された各通過領域を選択的に塞ぐ手段を有する。
−この各要素は、嵌合軸線に沿って長い形を示す。
−各通過領域の少なくとも一部が、第2要素に取外し可能に追加された部分によって規定される。
−閉鎖手段は、塞がれる各通過領域に対して関連する特にボール形の閉鎖部分を有する。この通過領域は、閉鎖部分の受取り及び半径方向の固定及び直交半径方向の固定のための孔の形である。
−閉鎖手段は、第2要素に少なくとも1つの支持面を規定する。この表面は、嵌合軸線に対してほぼ平行の方向の移動に面する;
−指標手段は、第1要素と共に少なくとも1つの要素から構成され、これらの要素のうちの少なくとも一部が、各要素に対して嵌合軸線に沿ってずれていて間違いなしを保証する。
−2つの要素は、全体的に管状の形である。要素のうちの1つの要素の外面が、ほぼ補間的にその他の要素の段差を付けた内面に対して段差を付けている。その結果、これらの要素が互いに嵌合されている場合、これらの段差のある面が、協働して2つの要素をほぼ同軸状にする。
−2つの要素のうちの第1要素に取外し可能に連結される少なくとも1つの要素を有し、−この各要素の通過領域が、これらの要素の嵌合中に第2要素によって形成され、
−第2要素に取外し可能に連結された各通過領域を選択的に塞ぐ手段を有する。
−この各要素は、嵌合軸線に沿って長い形を示す。
−各通過領域の少なくとも一部が、第2要素に取外し可能に追加された部分によって規定される。
−閉鎖手段は、塞がれる各通過領域に対して関連する特にボール形の閉鎖部分を有する。この通過領域は、閉鎖部分の受取り及び半径方向の固定及び直交半径方向の固定のための孔の形である。
−閉鎖手段は、第2要素に少なくとも1つの支持面を規定する。この表面は、嵌合軸線に対してほぼ平行の方向の移動に面する;
−指標手段は、第1要素と共に少なくとも1つの要素から構成され、これらの要素のうちの少なくとも一部が、各要素に対して嵌合軸線に沿ってずれていて間違いなしを保証する。
−2つの要素は、全体的に管状の形である。要素のうちの1つの要素の外面が、ほぼ補間的にその他の要素の段差を付けた内面に対して段差を付けている。その結果、これらの要素が互いに嵌合されている場合、これらの段差のある面が、協働して2つの要素をほぼ同軸状にする。
また本発明は、嵌合軸線に沿って互いに嵌合されるように適合された2つの要素を接合する方法に関する。これらの要素は、全体的に管状であって形の補間による2つの要素を対にするように適合された間違いのない手段を支援しかつ2つの要素を角で示す手段を支援する。この手段は、以下の連続ステップによって特徴付けられる:
−2つの要素が、例えば視覚的に、可能ならばカメラを使用して又は予め設定した相対運動で、特にこれらの要素を操作するロボットを制御するためのプログラミングされた命令にしたがって、これらの要素を概略的に位置決めすることによって互いに接近される;
−これらの2つの要素は、一方の要素の段差のある外面と他方の要素の補間的に段差のある内面とが協働することによって互いに係合してこれらの要素をほぼ同軸にする;
−これらの要素によってそれぞれ形成された角のある指標手段の一部が互いに協働するまで、一方の要素が、他方の要素に対して嵌合軸線の周りに回転中に調整される;
−間違いのない手段がそれぞれ、互いに協働するこれらの2つの要素によって形成されるまで、一方の要素が、他方の要素に対して互いに嵌合軸線に沿って平行に直線運動方向にシフトする。
−間違いのない手段のこれらのそれぞれの部分が、互いに補間的である場合、これらの要素の他方の要素に対する一方の要素の相対的な直線運動が、同じ方向で続く。
−2つの要素が、例えば視覚的に、可能ならばカメラを使用して又は予め設定した相対運動で、特にこれらの要素を操作するロボットを制御するためのプログラミングされた命令にしたがって、これらの要素を概略的に位置決めすることによって互いに接近される;
−これらの2つの要素は、一方の要素の段差のある外面と他方の要素の補間的に段差のある内面とが協働することによって互いに係合してこれらの要素をほぼ同軸にする;
−これらの要素によってそれぞれ形成された角のある指標手段の一部が互いに協働するまで、一方の要素が、他方の要素に対して嵌合軸線の周りに回転中に調整される;
−間違いのない手段がそれぞれ、互いに協働するこれらの2つの要素によって形成されるまで、一方の要素が、他方の要素に対して互いに嵌合軸線に沿って平行に直線運動方向にシフトする。
−間違いのない手段のこれらのそれぞれの部分が、互いに補間的である場合、これらの要素の他方の要素に対する一方の要素の相対的な直線運動が、同じ方向で続く。
この方法の有益な追加の特徴によれば、2つの要素の接近中に、一方の要素が、嵌合軸線にほぼ沿って他方の要素に関連するキャッチに対して一方の要素の照準部材を監視することによって他方の要素に対して角で概略的に位置決めされる。
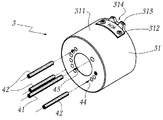
図面を参照する。図1〜3は、図7中に示された連結部5の雄要素1を示す。この雄要素1は、長手方向軸線X−Xの全体的に管状の形を示す。この雄要素1は、以下で詳しく説明する連結部5の接合の間に流体等用のケーブル,電気コネクタ,経路を受け取り、きつく及び/又は絶縁した方式でそれぞれ補間要素に連結されるように適合されている。
図1〜3の以下の説明は、簡便のために「後」方向は図1,2中の左を向く方向であり、「前」方向はその反対を向く方向である。したがって図3は、要素1の前面に対応する。
雄要素1は、軸線X−Xの円形ベースの全体的にシリンダ状の連続した3段部分から成る本体から構成される。したがってこの本体は、それぞれ減少する外径d11,d12及びd13を有するリアエンドフランジ11,シリンダ状の可動部分12及びシリンダ状の前部分13から構成される。部分12と部分13との間によって形成される肩は符号14で示される。実質的に一定な直径の中心孔15が、この本体の全長にわたって貫通していて、上述したケーブル,コネクタ及び/又は経路を収容する。
エンドフランジ11は、その周囲の一点に半径方向に外側に突出しているキャッチ111及び文字数字符号「A06」が記載されているIDプレート112を有する。
可動部分12の外面が、この外面に窪みを付けた複数の長手溝を有する。これらの長手溝の後方短部は閉鎖されている。これらの長手溝の前方短部は、肩14の高さの外側で開いている。1つの溝121が、これらの溝から区別される。この溝121は、その他の9つの同じ溝122A,122B,…, 122Iよりも長い。横断面では、溝121及び122A〜122Iがそれぞれ円形アーチの形の輪郭を示す。
雄要素1は、環状リング21又はワッシャを有し、同軸状に前部分13の周りに追加される。さらにこのリング21の内径が、前部分13の外径にほぼ等しく、その外径が、可動部分12の外径にほぼ等しい。この環状リング21の後面21aが、肩14に軸線方向に接触するまで、この環状リング21は、前部分13の周りに嵌合される。リング22が、軸線方向前方に保持するためのリング22が、この前部分13に窪みを付けた対応する環状溝に追加される。
環状リング21は、その周囲にわたって窪みを付けた複数の同じ孔を有する。環状リング21の全ての孔が、その後面(21a)及びその全面(21b)及び環状リングの外周縁部で開いている。環状リング21が雄要素1に追加されている場合、これらの孔は、溝121及び122A〜122Iの軸線方向の延在に沿って配置される。その結果、これらの溝の前端部が、これらの孔の1つに直接通じる。その結果、1つの孔211が、これらの孔から区別されて溝121と一直線上に配置される。その他の9つの孔212A〜212Iはそれぞれ、溝122A〜122Iと一直線上に配置される。環状リング21が雄要素1に追加されるときに、各孔がその関連する溝と正確に一直線上になることを保証するため、後面21aが、例えば軸線方向に突出しているスタッド213を有する(図1)。このスタッド213は、肩14に軸線方向に窪みを付けた対応する止まりハウジングに嵌合する。
環状リング21の孔212A〜212Iはそれぞれ、閉鎖ボール23を受けるために適合されている。したがって、図1〜3の雄要素1に関しては、これらの9つの孔のうちの5つの孔、すなわち孔212A,212B,212D,212F及び212Hが、ボール23を受ける。
横断面では、孔212A〜212Iの輪郭が、180 °以上にわたってボール23の円形輪郭の形にほぼ補間的に追従し、その結果半径方向に及び軸線X−Xに対して全ての垂直方向にボールを不動にする。さらに各孔の後側は、その前側よりも多く開いている。その結果、図1中の矢印24によって示された軸線X−Xに対してほぼ平行な直線軌跡方向にボール23をリング21の後面21aから自由に孔に誘導することができる一方で、このボールが前方を通じて飛び出すことを阻止する。リング21が雄要素1に追加される場合、孔212A,212B,212D,212F及び212H内に配置されたボール23が、肩14に軸線方向に接触する。これらの孔の直径は、孔の軸線方向の寸法にほぼ等しい。
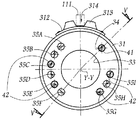
図4〜6は、軸線Y−Yの全体的に管状形の図7の連結部5の雌要素3を示す。以下で詳しく説明するように、全体的に軸線X−X及びY−Yに平行に相対運動接近によって、図1〜3の雄要素1及び図4〜6の雌要素3が互いに嵌合する。
簡便のため以下の図4〜6の説明では、「前」方向が図4の読取手に向かう方向及び図5中の右に向かう方向に一致する。「後」方向は、その反対方向である。したがって図6は、要素3の前面に一致する。
雌要素3は、管状本体31から構成される。この管状本体31は、ほぼシリンダ状の外面311を有する。この外面311は、軸線Y−Yの円形ベースをなしかつ雄要素1のエンドフランジ11の外径d11に等しい。この外面311は、文字数字符号「A06」が記載されているIDプレート312及び照準部材313を有する。この照準部材313は、本体31の周囲上に前後に配置されてその間でU字状の断面の照準空間314を規定している外面311から突出している2つの同じアームから構成される。この空間314のベースが、エンドフランジ11のキャッチ111の直径にほぼ等しい周囲寸法を示す。
雌要素3の本体31が、内部で後部分32及び前部分33によって形成された段差のある孔をその長さの全体にわたって規定する。両部分32,33は、軸線Y−Yの円形ベースであって張出領域36によって互いに連結されている。前部分33の内径d33は、後部分32の内径d32よりも正確に小さくかつ雄要素1の本体の前部分13の外径d13にほぼ等しい。その一方で後部分32の内径d32は、雄要素の可動部分12の外径d12にほぼ等しい。
同様に本体31は、そこに円形でそれぞれ軸線Y−Yに対して平行な複数のシリンダ状の開口部34,35A〜35Iを有する。これらの開口部の前端部は、本体31の前面31bで自由に開いている。その一方でこれらの開口部の後端部は閉鎖されている。横断面では、これらの開口部の軸線が、軸線Y−Yを中心に円形に配置されかつ後の穿孔部分32の内径にほぼ等しい。その結果、これらの開口部の後部分が、この後部分32内で半径方向に開いている。これらの開口部の長さは、前の穿孔部分33の長さよりも大きい。さらにこれらの開口部は、溝121,122A〜122Iと同様に横断面内に分散されている。
1つの開口部34が、上述した開口部から区別されかつその他の9つの開口部35A〜35Iよりも長い。
これらの開口部34及び35A〜35Iは、実質的に補間的なピンを受けて取り外し可能に不動にするために適合されている。さらに示された雌要素3では、開口部34が、矢印43によって示されたようなピン41を受ける。その一方で開口部35C,35E,35G及び35Iはそれぞれ、矢印44によって示されたようなピン41よりも小さい長さの同じピン42を受ける。これらのピン41,42の各々は、例えばそれらの前端部41b,42bの水準以外は対応する開口部の内径にほぼ等しい外径を呈する(つまり、これらのピンが、対応する開口部内に完全に受け取られたときに、これらのピンの端部が、本体31の前面31bの水準に位置する)。この端部は、僅かに大きい外径を呈する。その結果、これらのピンの前端部41b,42bは、開口部31の内部に取り外し可能に差し込むためのそれぞれの面を形成する。
例えば、雄要素1が、例えばその後面の水準でコンソール又は機械(図示せず)に既に固定連結されている一方で、接合の操作が、雌要素3を操作するロボットによって実施されることを想定して、図1〜3の雄要素1と図4〜6の雌要素3との接合を説明する。
最初、雌要素3が、雄要素1から完全に独立している。内蔵されたカメラを可能に備えた上述したロボットによって、要素1と要素3とを互いに嵌合させようとする時間をかけることなしに、操作者が、雌要素を雄要素に持って行き、まずこの雄要素の端部にほぼ位置決めし、要素1の前部分13を要素3の後孔32内に誘導する。IDプレート112,312の符号の視覚的な比較は、操作者が2つの要素を先験的に正しい対であることを確認することを可能にする。
これらの要素を軸線X−Xに沿って全体的に観察する間に、操作者は雌要素3を軸線Y−Y周りに回転させる。その結果、雄要素1のエンドフランジ11のキャッチ111が、雌要素の照準部材313によって規定された照準空間314のほぼ中心に配置される。キャッチ111の相対位置が、図6中に破線で示されている。ユーザは、この構成では要素1,3が互いに適切な方法で角で粗く位置決めされていることを知る。
そしてその操作者は、ロボットを軸線X−Xに対してほぼ平行にかつ直接後に向けてEの方向に制御する。その結果、雌要素3の本体31の中心孔の後の対32が、雄要素1の本体の前部分13の周りに係合する。要素1と要素3との間の相対的な半径方向の位置決めがおおよそ正確であるだけでも、この前部分13の外径とこの後部分32の内径との間の差は、容易に実施される軸線方向の接近のこの最初の移動に対して十分である。さらに張出領域36が、雌要素の軸線方向の接近移動の間にこの雌要素を半径方向に誘導する。部分32,33の後領域がそれぞれ、部分12,13の前領域で中心合わせされる。その結果、軸線X−XとY−Yとが合体する。換言すれば、雄要素の段差のある外面と雌要素の段差のある内面との協働が、これらの要素を同軸状にすることを可能にする。
この軸線方向の接近移動の進行中に、ロボットが、ピン41の後端部41aをリング21の前面21bに移動させる。この場合、要素1と要素3との嵌合を阻止する。この接触が軸線X−Xに対してほぼ平行になされ、接触している部分がこの方向に一定に保持される限り、ロボットによるこの接触の検出の低い能力、つまり人間の操作者に比べたその「感度」は、連結される要素に不利とならない。
次いで操作者は、雌要素3の後方への駆動制御を維持しつつ、ピン41が孔211及び溝121内部に係合するまで、ロボットにこの雌要素3をその軸線Y−Y周りに回転させることを再び命令する。最後に操作者は、試験を実施し、ピン41がキャッチ111及び照準部材313による先の視覚的位置決めによって実際に少なくとも角でこの溝121とほぼ一直線上に配置されたときの誤差を知る。この状態では、要素1及び3の半径方向の位置決め自体が、雌部材3の穿孔された後部分32と雄要素1の可動部分12との協働及び穿孔された前部分33と前部分13との協働によって保証される。
ピン41の後端部41aが、溝121の前端部に係合すると、雌要素3が、雄要素1に対して角でかつ半径方向に位置決めされる。その結果、開口部35A〜35Iがそれぞれ、雄要素の溝122A〜122Iと精確に一直線上に配置される。
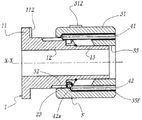
次いで操作者は、ピン42の後端部42aがリング21の水準に軸線方向に到達するまで雄要素に対する雌要素の後Eに向かう軸線方向の接近を再び制御する。孔212C,212E,212G及び212Iが、ボール23によって塞がれない限り、ピン42がこれらの孔を通過し、雄要素の周りの雌要素の誘導の軸線方向の移動が、これらの溝の閉じた後端部まで妨害されることなしに続行される。次いで要素1及び3は、図7の構成でつまり互いに嵌合し、これらの要素の内部に配置されている、異なるケーブル,コネクタ又は流体経路(図示せず)を連結及び/又は結合させる。
この嵌合が実施されると、可逆的な固定手段(図示せず)が、要素1及び3を互いに強固に連結させる。
この嵌合が実施されると、可逆的な固定手段(図示せず)が、要素1及び3を互いに強固に連結させる。
要素1と要素3とが嵌合されたときのピン42及びボール23によって塞がれた孔212A,212B,212D,212F,212H及びピン42の通過を可能にするその他の孔212C,212E,212G,212Iの結合された存在が、得られた連結部の雄要素と雌要素との間の正しい対を保証する。これらの要素は、間違いのない締結を得ることをある程度可能にする。この締結の確認は、雄要素と雌要素との間の軸線方向の移動に沿ってだけで実施される。その結果これらの要素は、IDプレート112及び312の簡単な視覚的な比較に加えて安全性を保障し続ける。連結部の接合が、カメラによって、悪い視界で又は塞がれた環境で遠隔で実施される場合、これらのIDプレート112,312は、忘れられるか又は作るのが困難である。
この点を示すため、図8は、図1〜3の雄要素1及びこの雄要素1と対でない雌要素3′を示す。この雌要素3′は、雌要素3と同じ本体31から構成されるものの、要素3と違って本体31の開口部35F内部に追加のピン42を有する。要素3′が要素1の周りに嵌合しようとする一方で、これらの要素の角及び半径方向の位置決めが、上述したように指標ピン41によって既に実施された場合、図8の下の部分に示されたように、追加ピン42の後端部42aが、リング21の孔212F内に配置されたボール23に対して軸線方向に接触する。この場合、これらの要素の軸線方向の相対移動を続けることが不可能である。この場合、この接近の阻止は、追加ピン42と孔212Fのボール23との協働だけによって保証される。このボールの外面23aの一部が、雄要素1の本体の肩14に対して接触するので、このことは、有効でかつ抵抗力のあるブロックを構成する。それ故にこの使用される間違いのない手段は、ロボット等によって連結された要素の操作に対して適合されている。これらのロボット等は、その低い感度の理由によって先験的にこれらの要素を損傷する危険にさらさない。
リング21が、雄要素の本体に対して取り外し可能であり、ピン42が、雌要素の本体に取り外し可能に連結されている限り、希望通りに雄要素及び雌要素のこれらの本体の間違いのない状態を実施することが、固有の構成を有する複数の連結部を設定するのに操作者にとって簡単で迅速である。例えばボール23によって9箇所を閉鎖でき、ピン42を9箇所に挿入できる場合、126 通りの可能な間違いのない構成が考えられる。
上述した様々な連結部5の様々な配置も考えられる:
−ピン41と関連する溝121との協働が、雄要素との雌要素との嵌合の間にこれらの要素を相対的に角で位置決めすることが本質的に可能である限り、孔211が、先験的にボール23を受けるためのものではないので、リング21の対応するこの孔211は、孔212A〜212Iに幾何学的に同一である必要がない。
−ピン42を雌要素3の本体31に取外し可能に連結するためのその他の手段も考えられる;例えば、これらのピンは、開口部35A〜35I内に設けられた外側の補間のタッピングを支持する。又はこれらのピンは、開口部35A〜35I内に力で嵌合される。各開口部は、円リップ等によって雌要素3に対してその前端部でブロックされる。
−溝122A〜122I/ピン42の配置は、雄要素(1)及び雌要素(3)に対して逆にしてもよい。
−ピン42の構成が、リング21の水準で「読取られる」、つまり孔212A〜212Iが塞がれていない状態でこれらの孔を通過する可能性に関して検査される限り、各ピンに対して固有の溝122A〜122Iを提供する必要がない。反対にこれらの溝は、雄要素1の可動部分12の単一の周囲凹部と交換される。この凹部は、横断面内で円弧に対応する円弧にわたって延在する。この円弧は、その他の溝を通過して溝122A〜122Iを連結する。
−上述した構成のピン42以外の構成要素も可能可能である;例えばこれらの要素は、雌要素3に対して取外し可能に連結されたスタッドによって構成されてもよい。これらのスタッドは、軸線Y−Yに対して半径方向に延在し、各スタッドは、本体31の内面から半径方向に突出する;
−同様にボール23以外の塞ぐ構成も可能である;例えばリング21が、孔212A〜212Iと同じ位置で周囲にわたって分散したシリンダ状のハウジングによって軸線方向に横切られ、そして取外し可能なプラグが、リングの後面21を介して特にシリンダ状のハウジング内に入れることによって上述したシリンダ状のハウジングを塞ぐために設けられる。その一方でこのシリンダ状のハウジングは、雄要素には追加されない;本発明の別の実施の形態によれば、特に上述した構成要素の様々な例に関連して、構成可能な閉鎖部材が、リング21を使用することなしに雄要素1に個々に直接連結される;この場合、雄要素1の本体が、要素1,3の嵌合中のピン42の通過領域を直接規定し、孔212A〜212Iに機能的に類似する。この場合、これらの閉鎖部分は、これらの通過領域の特定の領域を選択的に止めるために提供され、例えば雄要素1の本体内にねじ止めされる。その結果、閉鎖部分の端部が、特に軸線X−Xに対して半径方向に選択された経路の領域を横切って延在する。
−ピン41と関連する溝121との協働が、雄要素との雌要素との嵌合の間にこれらの要素を相対的に角で位置決めすることが本質的に可能である限り、孔211が、先験的にボール23を受けるためのものではないので、リング21の対応するこの孔211は、孔212A〜212Iに幾何学的に同一である必要がない。
−ピン42を雌要素3の本体31に取外し可能に連結するためのその他の手段も考えられる;例えば、これらのピンは、開口部35A〜35I内に設けられた外側の補間のタッピングを支持する。又はこれらのピンは、開口部35A〜35I内に力で嵌合される。各開口部は、円リップ等によって雌要素3に対してその前端部でブロックされる。
−溝122A〜122I/ピン42の配置は、雄要素(1)及び雌要素(3)に対して逆にしてもよい。
−ピン42の構成が、リング21の水準で「読取られる」、つまり孔212A〜212Iが塞がれていない状態でこれらの孔を通過する可能性に関して検査される限り、各ピンに対して固有の溝122A〜122Iを提供する必要がない。反対にこれらの溝は、雄要素1の可動部分12の単一の周囲凹部と交換される。この凹部は、横断面内で円弧に対応する円弧にわたって延在する。この円弧は、その他の溝を通過して溝122A〜122Iを連結する。
−上述した構成のピン42以外の構成要素も可能可能である;例えばこれらの要素は、雌要素3に対して取外し可能に連結されたスタッドによって構成されてもよい。これらのスタッドは、軸線Y−Yに対して半径方向に延在し、各スタッドは、本体31の内面から半径方向に突出する;
−同様にボール23以外の塞ぐ構成も可能である;例えばリング21が、孔212A〜212Iと同じ位置で周囲にわたって分散したシリンダ状のハウジングによって軸線方向に横切られ、そして取外し可能なプラグが、リングの後面21を介して特にシリンダ状のハウジング内に入れることによって上述したシリンダ状のハウジングを塞ぐために設けられる。その一方でこのシリンダ状のハウジングは、雄要素には追加されない;本発明の別の実施の形態によれば、特に上述した構成要素の様々な例に関連して、構成可能な閉鎖部材が、リング21を使用することなしに雄要素1に個々に直接連結される;この場合、雄要素1の本体が、要素1,3の嵌合中のピン42の通過領域を直接規定し、孔212A〜212Iに機能的に類似する。この場合、これらの閉鎖部分は、これらの通過領域の特定の領域を選択的に止めるために提供され、例えば雄要素1の本体内にねじ止めされる。その結果、閉鎖部分の端部が、特に軸線X−Xに対して半径方向に選択された経路の領域を横切って延在する。
1 雄要素
3 雌要素
5 連結部
11 リアエンドフランジ
12 可動部分
13 前部分
14 肩
15 中心孔
21 環状リング
21a 後面
21b 前面
22 リング
23 閉鎖ボール
24 矢印
111 キャッチ
112 IDプレート
121 溝
122A 溝
122B 溝
122C 溝
122D 溝
122E 溝
122F 溝
211 孔
212A 孔
212B 孔
212C 孔
212D 孔
212F 孔
212G 孔
212H 孔
212I 孔
213 スタッド
31 管状本体
32 後部分
33 前部分
34 開口部
35A 開口部
35B 開口部
35C 開口部
35D 開口部
35E 開口部
35F 開口部
35G 開口部
35H 開口部
35I 開口部
36 張出領域
311 外面
312 IDプレート
313 照準部材
314 照準空間
41 ピン
42 ピン
43 矢印
44 矢印
3 雌要素
5 連結部
11 リアエンドフランジ
12 可動部分
13 前部分
14 肩
15 中心孔
21 環状リング
21a 後面
21b 前面
22 リング
23 閉鎖ボール
24 矢印
111 キャッチ
112 IDプレート
121 溝
122A 溝
122B 溝
122C 溝
122D 溝
122E 溝
122F 溝
211 孔
212A 孔
212B 孔
212C 孔
212D 孔
212F 孔
212G 孔
212H 孔
212I 孔
213 スタッド
31 管状本体
32 後部分
33 前部分
34 開口部
35A 開口部
35B 開口部
35C 開口部
35D 開口部
35E 開口部
35F 開口部
35G 開口部
35H 開口部
35I 開口部
36 張出領域
311 外面
312 IDプレート
313 照準部材
314 照準空間
41 ピン
42 ピン
43 矢印
44 矢印
Claims (10)
- 嵌合軸線(X−X)に沿って互いに嵌合するように適合された2つの要素(1,3)及び補間的な形の2つの要素の対に適合され2つの要素によって形成された間違いのない手段(23,42,212A〜212I)から構成された2つの管等を取外し可能に接合するために連結部(5)において、この連結部は、間違いのない手段(23,42,212A〜212I)の少なくとも一部が取外し可能にかつ形成可能に2つの要素(1,3)に連結されてこれらの要素の嵌合中に協働する前に互いに2つの要素を角で位置決めするように適合され2つの要素によって形成された2つの要素(1,3)を角で示すための手段(41,121)をさらに有することを特徴とする連結部。
- 間違いのない手段は:
−2つの要素(1,3)のうちの第1要素(3)に取外し可能に連結される少なくとも1つの要素(42)を有し、
−この各要素(42)の通過領域(212A〜212I)が、これらの要素(1,3)の嵌合中に第2要素(1)によって形成され、
−第2要素(1)に取外し可能に連結された各通過領域(212A〜212I)を選択的に塞ぐ手段(23)を有することを特徴とする請求項1に記載の連結部。 - この各要素(42)は、嵌合軸線(X−X)に沿って長い形を示すことを特徴とする請求項2に記載の連結部。
- 各通過領域(212A〜212I)の少なくとも一部が、第2要素に取外し可能に追加された部分(21)によって規定されることを特徴とする請求項2又は3に記載の連結部。
- 閉鎖手段(23)は、塞がれる各通過領域(212A〜212I)に対して関連する特にボール形の閉鎖部分を有し、この通過領域は、閉鎖部分の受取り及び半径方向の固定及び直交半径方向の固定のための孔(212A〜212I)の形であることを特徴とする請求項2〜4のいずれか1項に記載の連結部。
- 閉鎖手段(23)は、第2要素(1)に少なくとも1つの支持面(23a)を規定し、この表面は、嵌合軸線(X−X)に対してほぼ平行の方向の移動に面することを特徴とする請求項2〜5のいずれか1項に記載の連結部。
- 指標手段は、第1要素(3)と共に少なくとも1つの要素(41)から構成され、これらの要素のうちの少なくとも一部(41a)が、各要素(42)に対して嵌合軸線(X−X)に沿ってずれていて間違いなしを保証することを特徴とする請求項2〜6のいずれか1項に記載の連結部。
- 2つの要素(1,3)は、全体的に管状の形である。要素のうちの1つの要素 (1)の外面が、ほぼ補間的にその他の要素(3)の段差を付けた内面に対して段差を付けていて、その結果、これらの要素が互いに嵌合されている場合、これらの段差のある面が、協働して2つの要素をほぼ同軸状にすることを特徴とする請求項1〜7のいずれか1項に記載の連結部。
- 嵌合軸線(X−X)に沿って互いに嵌合されるように適合された2つの要素(1,3)を接合する方法にあって、これらの要素は、全体的に管状であって形の補間による2つの要素を対にするように適合された間違いのない手段(23,42,212A〜212I)を支援しかつ2つの要素を角で示す手段(41,121)を支援し、この手段は、以下の連続ステップによって特徴付けられる方法において:
−2つの要素(1,3)が、例えば視覚的に、可能ならばカメラを使用して又は予め設定した相対運動で、特にこれらの要素を操作するロボットを制御するためのプログラミングされた命令にしたがって、これらの要素を概略的に位置決めすることによって互いに接近され;
−これらの2つの要素(1,3)は、一方の要素(1,3)の段差のある外面と他方の要素(1,3)の補間的に段差のある内面とが協働することによって互いに係合してこれらの要素をほぼ同軸にし;
−これらの要素によってそれぞれ形成された角のある指標手段(41,121)の一部が互いに協働するまで、一方の要素(1,3)が、他方の要素(1,3)に対して嵌合軸線の周りに回転中に調整され;
−間違いのない手段(23,42,212A〜212I)がそれぞれ、互いに協働するこれらの2つの要素によって形成されるまで、一方の要素(1,3)が、他方の要素(3,1)に対して互いに嵌合軸線(X−X)に沿って平行に直線運動方向にシフトし、
−間違いのない手段(23,42,212A〜212I)のこれらのそれぞれの部分が、互いに補間的である場合、これらの要素の他方の要素(3,1)に対する一方の要素(1,3)の相対的な直線運動が、同じ方向で続くことを特徴とする方法。 - 2つの要素(1,3)の接近中に、一方の要素(3)が、嵌合軸線(X−X)にほぼ沿って他方の要素(1)に関連するキャッチ(111)に対して一方の要素の照準部材(313)を監視することによって他方の要素に対して角で概略的に位置決めされることを特徴とする請求項9に記載の方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0402356A FR2867253B1 (fr) | 2004-03-05 | 2004-03-05 | Raccord de jonction amovible et procede de raccordement correspondant |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005308209A true JP2005308209A (ja) | 2005-11-04 |
Family
ID=34746501
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005060090A Withdrawn JP2005308209A (ja) | 2004-03-05 | 2005-03-04 | 取外し可能な接合連結部及び対応する連結方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7520536B2 (ja) |
| EP (1) | EP1571387B1 (ja) |
| JP (1) | JP2005308209A (ja) |
| CN (1) | CN100483878C (ja) |
| DE (1) | DE602005001003T2 (ja) |
| ES (1) | ES2284146T3 (ja) |
| FR (1) | FR2867253B1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014152833A (ja) * | 2013-02-06 | 2014-08-25 | Tokyo Electron Ltd | ガス導入配管接続構造及びこれを用いた熱処理装置 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7220923B1 (en) * | 2006-06-30 | 2007-05-22 | Internatioinal Metal Hose Company | Clip-on electrical conduit connector |
| DE202009001569U1 (de) * | 2009-02-05 | 2010-07-01 | Stäubli-Tec Systems GmbH | Kupplung zur Übertragung einer Bewegung mit einer Verriegelungseinrichtung |
| US8360800B1 (en) * | 2011-10-25 | 2013-01-29 | Itt Manufacturing Enterprises, Inc. | Multi-polarized connector |
| USD712014S1 (en) | 2011-12-09 | 2014-08-26 | John Guest International Limited | Fluid connector |
| USD711516S1 (en) | 2011-12-09 | 2014-08-19 | John Guest International Limited | Fluid connector |
| US9050788B2 (en) * | 2011-12-22 | 2015-06-09 | Stratasys, Inc. | Universal adapter for consumable assembly used with additive manufacturing system |
| ES2715456T3 (es) | 2013-03-08 | 2019-06-04 | Becton Dickinson Co | Dispositivo de bloqueo de acceso de jeringa IV |
| DE102014200732B4 (de) * | 2014-01-16 | 2018-02-22 | Te Connectivity Germany Gmbh | Mechanisch programmierbare Kodiervorrichtung, Programmiervorrichtung und elektrisches Steckerelement mit selbigem sowie Kodierverfahren für einen elektrischen Steckverbinder |
| US10148035B2 (en) | 2015-10-20 | 2018-12-04 | Itt Manufacturing Enterprises Llc | Connection interfaces with coupling mechanisms |
| FR3108203B1 (fr) * | 2020-03-11 | 2023-06-02 | Axon Cable Sa | Ensemble de connexion à fixation rapide et sécurisée |
| DE102021105255B4 (de) * | 2021-03-04 | 2022-10-13 | Festo Se & Co. Kg | Vorrichtung mit über eine Verbindungsschnittstelle verbundenen Bauteilen und Verfahren zur Verbindung von Bauteilen |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1187435B (de) | 1960-03-30 | 1965-02-18 | Jaeger Erich | Kupplungssystem fuer Druckgasanlagen, insbesondere in Krankenhaeusern |
| US3177462A (en) * | 1962-05-01 | 1965-04-06 | Sarnmark Folke Allan | Connector for electrical conductors having male and female parts to be connected |
| US3287031A (en) * | 1964-09-21 | 1966-11-22 | William H Simmons | Indexed keyed connection |
| US3509515A (en) * | 1967-12-27 | 1970-04-28 | Northrop Corp | Electrical connector |
| BE757099A (fr) * | 1969-10-15 | 1971-03-16 | Bunker Ramo | Connecteur electrique |
| US3829816A (en) * | 1972-08-21 | 1974-08-13 | Exxon Production Research Co | Coupling assembly |
| DE2646063A1 (de) * | 1975-10-20 | 1977-04-21 | Itt Ind Gmbh Deutsche | Kupplungsgehaeuse fuer verbinder |
| DE2549177C3 (de) * | 1975-11-03 | 1985-10-03 | Siemens AG, 1000 Berlin und 8000 München | Kupplungsvorrichtung für zahnärztliche Handstücke |
| US4111514A (en) * | 1977-06-23 | 1978-09-05 | International Telephone And Telegraph Corporation | Polarizing keying device for electrical connectors |
| US4407529A (en) * | 1980-11-24 | 1983-10-04 | T. J. Electronics, Inc. | Self-locking coupling nut for electrical connectors |
| US4619640A (en) * | 1984-08-17 | 1986-10-28 | Potolsky Abraham I | Blood transfusion connector assembly |
| US4703957A (en) * | 1984-10-05 | 1987-11-03 | Colder Products Company | Miniature tube fitting having a barbed stem portion surrounded by a protective shroud and method for making same |
| US4676563A (en) * | 1985-05-06 | 1987-06-30 | Innotech Energy Corporation | Apparatus for coupling multi-conduit drill pipes |
| US5007490A (en) * | 1990-06-20 | 1991-04-16 | Ide Russell D | Progressive cavity drive train with elastomeric joint assembly for use in downhole drilling |
| US5449302A (en) * | 1993-08-24 | 1995-09-12 | Cooper Industries, Inc. | Heavy duty electrical connection system |
| US5577775A (en) * | 1995-02-07 | 1996-11-26 | Barco, A Division Of Marison Industries | Bearingless coolant union |
| GB9616769D0 (en) * | 1996-08-09 | 1996-09-25 | Pegasus Airwave Ltd | Connector |
| JP3299495B2 (ja) * | 1997-12-29 | 2002-07-08 | サーパス工業株式会社 | 誤接続防止コネクタ− |
-
2004
- 2004-03-05 FR FR0402356A patent/FR2867253B1/fr not_active Expired - Fee Related
-
2005
- 2005-03-03 US US11/069,965 patent/US7520536B2/en not_active Expired - Fee Related
- 2005-03-04 ES ES05356041T patent/ES2284146T3/es not_active Expired - Lifetime
- 2005-03-04 JP JP2005060090A patent/JP2005308209A/ja not_active Withdrawn
- 2005-03-04 CN CNB2005100716205A patent/CN100483878C/zh not_active Expired - Fee Related
- 2005-03-04 EP EP05356041A patent/EP1571387B1/fr not_active Expired - Lifetime
- 2005-03-04 DE DE602005001003T patent/DE602005001003T2/de not_active Expired - Lifetime
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014152833A (ja) * | 2013-02-06 | 2014-08-25 | Tokyo Electron Ltd | ガス導入配管接続構造及びこれを用いた熱処理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| ES2284146T3 (es) | 2007-11-01 |
| FR2867253A1 (fr) | 2005-09-09 |
| EP1571387B1 (fr) | 2007-05-02 |
| FR2867253B1 (fr) | 2007-10-12 |
| CN100483878C (zh) | 2009-04-29 |
| CN1674377A (zh) | 2005-09-28 |
| DE602005001003D1 (de) | 2007-06-14 |
| DE602005001003T2 (de) | 2008-01-10 |
| US20050194781A1 (en) | 2005-09-08 |
| EP1571387A1 (fr) | 2005-09-07 |
| US7520536B2 (en) | 2009-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005308209A (ja) | 取外し可能な接合連結部及び対応する連結方法 | |
| ES2339404T3 (es) | Cabeza para quemador de plasma, fuste para quemador de plasma y quemador de plasma. | |
| US10836050B2 (en) | Quick disconnect apparatus for modular tooling | |
| US20100221676A1 (en) | Coupling Between a Medical Handpiece Part and a Supply Hose | |
| KR101980048B1 (ko) | 가스 실린더 자동 결합 장치 및 방법 | |
| KR101429557B1 (ko) | 파이프 조인트 | |
| KR102356405B1 (ko) | 밀봉 엘리먼트 및 적응된 커넥터 파트들을 갖는 커넥터 | |
| US11668419B2 (en) | Swivel knuckle connection | |
| WO2020179421A1 (ja) | 管継手、配管施工管理システム、及び、配管施工管理方法 | |
| BR112016006149B1 (pt) | rosca de conexão para um sistema de maçarico | |
| JP2020197279A (ja) | コネクタおよびコネクタの組付方法 | |
| KR102779972B1 (ko) | 바요넷 록의 제1 연결 상대 및 제2 연결 상대를 부호화하는 장치 및 장치 세트 | |
| TWI834669B (zh) | 流體傳輸用連接器之插頭、流體傳輸用連接器之插座、流體傳輸用連接器以及連接流體傳輸用連接器之方法 | |
| US20240229994A1 (en) | Swivel knuckle connection | |
| KR101532176B1 (ko) | Co2용접용 토치 | |
| JP7602489B2 (ja) | 自動化されたストップコック(stopcock)作動のための保持デバイスおよび装置 | |
| CN101331354A (zh) | 用于与管状件连接的连接元件 | |
| KR102526341B1 (ko) | 연결부 검증기 | |
| US20260033882A1 (en) | Connection device and surgical instrument | |
| KR102937173B1 (ko) | 용접 장치 | |
| JP6173804B2 (ja) | 工具マガジン | |
| GB2609761A (en) | Plumbing fitting | |
| TWI697370B (zh) | 手柄裝置及鑽孔機 | |
| JP6846101B2 (ja) | 管継手及び位置決め方法 | |
| KR20140099572A (ko) | 회전식 덕트 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20080513 |