JP2005350010A - ステレオ式車外監視装置 - Google Patents
ステレオ式車外監視装置 Download PDFInfo
- Publication number
- JP2005350010A JP2005350010A JP2004175198A JP2004175198A JP2005350010A JP 2005350010 A JP2005350010 A JP 2005350010A JP 2004175198 A JP2004175198 A JP 2004175198A JP 2004175198 A JP2004175198 A JP 2004175198A JP 2005350010 A JP2005350010 A JP 2005350010A
- Authority
- JP
- Japan
- Prior art keywords
- stereo
- projector
- infrared
- irradiation
- monitoring device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012806 monitoring device Methods 0.000 title claims abstract description 18
- 238000012544 monitoring process Methods 0.000 claims abstract description 50
- 238000012545 processing Methods 0.000 claims abstract description 20
- 238000003384 imaging method Methods 0.000 claims description 4
- 238000005286 illumination Methods 0.000 abstract description 2
- 238000010586 diagram Methods 0.000 description 7
- 238000003702 image correction Methods 0.000 description 5
- 230000004297 night vision Effects 0.000 description 3
- 230000001678 irradiating effect Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- PXFBZOLANLWPMH-UHFFFAOYSA-N 16-Epiaffinine Natural products C1C(C2=CC=CC=C2N2)=C2C(=O)CC2C(=CC)CN(C)C1C2CO PXFBZOLANLWPMH-UHFFFAOYSA-N 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000000052 comparative effect Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000008094 contradictory effect Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S11/00—Systems for determining distance or velocity not using reflection or reradiation
- G01S11/12—Systems for determining distance or velocity not using reflection or reradiation using electromagnetic waves other than radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/46—Indirect determination of position data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/10—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used
- B60R2300/103—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used using camera systems provided with artificial illumination device, e.g. IR light source
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/10—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used
- B60R2300/105—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used using multiple cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/10—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used
- B60R2300/106—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used using night vision cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/10—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used
- B60R2300/107—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used using stereoscopic cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/8053—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for bad weather conditions or night vision
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Mathematical Physics (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Lighting Device Outwards From Vehicle And Optical Signal (AREA)
- Closed-Circuit Television Systems (AREA)
- Traffic Control Systems (AREA)
Abstract
【課題】ステレオ式車外監視装置において、夜間走行時に広範囲な監視領域を確保して、監視精度の一層の向上を図る。
【解決手段】ステレオ式車外監視装置において、自車両の周辺を照射する投光器と、投光器のみの照射時よりも広い監視領域を確保するために、投光器よりも遠方を赤外線で照射するとともに、投光器よりも広い照射角で投光器よりも近傍を赤外線で照射する複数の赤外線補助灯と、一対の赤外線カメラによって構成され、少なくとも赤外線補助灯の照射範囲β,γを撮像するステレオカメラと、ステレオカメラから出力された一対の撮像画像に基づいて、ステレオマッチングを用いて、距離データを算出するステレオ画像処理部と、ステレオ画像処理部から出力された距離データに基づいて、自車両の周辺に存在する対象物を監視する監視部とを有する。
【選択図】図3
【解決手段】ステレオ式車外監視装置において、自車両の周辺を照射する投光器と、投光器のみの照射時よりも広い監視領域を確保するために、投光器よりも遠方を赤外線で照射するとともに、投光器よりも広い照射角で投光器よりも近傍を赤外線で照射する複数の赤外線補助灯と、一対の赤外線カメラによって構成され、少なくとも赤外線補助灯の照射範囲β,γを撮像するステレオカメラと、ステレオカメラから出力された一対の撮像画像に基づいて、ステレオマッチングを用いて、距離データを算出するステレオ画像処理部と、ステレオ画像処理部から出力された距離データに基づいて、自車両の周辺に存在する対象物を監視する監視部とを有する。
【選択図】図3
Description
本発明は、一対の赤外線カメラによって構成されたステレオカメラを用いて、自車両の周囲を監視するステレオ式車外監視装置に関する。
例えば、特許文献1には、航空機の夜間飛行時における監視精度を確保すべく、一対の赤外線カメラを用いたステレオ式監視装置が開示されている。また、特許文献2には、可視光および赤外光の双方で照射された自車両前方を単眼の赤外線カメラで暗視する暗視装置が開示されている。この暗視装置では、前照灯における光源からの出射光を可視光と赤外光に分離して、赤外光を可視光よりも遠方に照射している。これにより、自車両の前方において、可視光の照射領域外に赤外光のみが照射される領域が形成される。このような状態で、赤外光を受光する単眼の赤外線カメラによって自車両前方の景色が撮像され、撮像された画像が表示装置に表示される。ドライバーは、表示された画像を通じて、可視光の照射領域内のみならず、その領域外に存在する遠方の障害物も把握することが可能になる。
特開2001−344597号公報
特開2003−217319号公報
ところで、自動車等の車両に搭載されたステレオ式車外監視装置で解決すべき課題として、夜間走行時における監視領域の拡大が挙げられる。車両に搭載された前照灯(ロービーム)は、対向車を運転するドライバーへの配慮等から、自車両の比較的近傍を照射するように設定されている。このような照射状況において、監視装置は、前照灯の照射領域内に存在する対象物を認識することはできても、その領域外の対象物に関しては、それ自体が発光している場合等を除いて認識することが困難になる。その結果、夜間走行時に確保される監視領域は、日中走行時のそれよりも必然的に狭くなってしまう。
かかる問題の解決策の一つとして、可視光カメラの代わりに赤外線カメラをステレオカメラとして用いるとともに、赤外線補助灯を追加して、前照灯および赤外線補助灯の双方で自車両前方を照射する方法が考えられる。しかしながら、この場合であっても、夜間走行時に日中走行時と同様の監視領域を確保することは困難である。なぜなら、例えば、前照灯よりも遠方を赤外線で照射する場合には、監視領域を遠方に拡大できても、自車両の極近傍左右が依然死角として残ってしまうからである。逆に、前照灯よりも広い照射角で前照灯よりも近傍を赤外線で照射する場合には、上記死角を解消できても、赤外光が遠方まで届かないので、監視領域を遠方に拡大することができないからである。
なお、上述の課題は、自車両前方に限定されるものではない。すなわち、自車両の後方を監視する場合において、例えば後退灯に赤外線補助灯を追加しても同様の課題を有する。
本発明は、かかる事情に鑑みてなされたものであり、その目的は、ステレオ式車外監視装置において、夜間走行時であっても広範囲な監視領域を確保して、監視精度の一層の向上を図ることである。
かかる課題を解決するために、第1の発明は、自車両の周辺を照射する投光器と、投光器のみの照射時よりも広い監視領域を確保するために、投光器よりも遠方を赤外線で照射するとともに、投光器よりも広い照射角で投光器よりも近傍を赤外線で照射する複数の赤外線補助灯と、一対の赤外線カメラによって構成され、少なくとも赤外線補助灯の照射範囲を撮像するステレオカメラと、ステレオカメラから出力された一対の撮像画像に基づいて、ステレオマッチングを用いて、距離データを算出するステレオ画像処理部と、ステレオ画像処理部から出力された距離データに基づいて、自車両の周辺に存在する対象物を監視する監視部とを有するステレオ式車外監視装置を提供する。
第2の発明は、自車両の周辺を照射する投光器と、投光器よりも遠方を赤外光で照射する第1の赤外線補助灯と、投光器より広い照射角で投光器よりも近傍を赤外光で照射する第2の赤外線補助灯と、一対の赤外線カメラによって構成され、少なくとも第1の赤外線補助灯の照射範囲および第2の赤外線補助灯の照射範囲を撮像するステレオカメラと、ステレオカメラから出力された一対の撮像画像に基づいて、ステレオマッチングを用いて、距離データを算出するステレオ画像処理部と、ステレオ画像処理部から出力された距離データに基づいて、自車両の周辺に存在する対象物を監視する監視部とを有するステレオ式車外監視装置を提供する。
第3の発明は、自車両の周囲を照射する投光器と、投光器の照射方向よりも右側に向けて、投光器よりも遠方を赤外光で照射する第1の赤外線補助灯と、投光器の照射方向よりも左側に向けて、投光器よりも遠方を赤外光で照射する第2の赤外線補助灯と、一対の赤外線カメラによって構成され、少なくとも第1の赤外線補助灯の照射範囲および第2の赤外線補助灯の照射範囲を撮像するステレオカメラと、ステレオカメラから出力された一対の撮像画像に基づいて、ステレオマッチングを用いて、距離データを算出するステレオ画像処理部と、ステレオ画像処理部から出力された距離データに基づいて、自車両の周辺に存在する対象物を監視する監視部とを有するステレオ式車外監視装置を提供する。
ここで、第1から第3の発明のいずれかにおいて、上記投光器は、自車両の前部の左右にそれぞれ取り付けられた一対の前照灯であってもよい。
本発明によれば、複数の赤外線補助灯を用いて、前照灯や後退灯といった投光器によって確保される監視領域を遠方および近傍の双方に拡大することにより、監視制御上、夜間走行時であっても広範囲な監視領域を確保できる。その結果、夜間走行時における監視精度の一層の向上を図ることが可能になる。
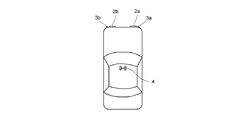
図1は、本実施形態にかかるステレオ式車外監視装置のブロック構成図である。このステレオ式車外監視装置1は、自車両前方の視認性が低下する夜間走行時(すなわち極暗状況下での走行時)において、前照灯および赤外線補助灯を協働させることにより、前照灯のみを用いる場合と比較して、監視制御上の監視領域を広範囲に確保する。図2に示すように、投光器としての一対の前照灯2a,2bは、自車両の前部の左右にそれぞれ取り付けられており、自車両の前方に可視光を照射する。一方の赤外線補助灯3aは、例えば、車両右前部に取り付けられた一方の前照灯2aの近傍に設けられている。また、他方の赤外線補助灯3bは、例えば、車両左前部に取り付けられた他方の前照灯2bの近傍に設けられている。これらの赤外線補助灯3a,3bは、自車両の前方に非可視光である赤外光、具体的には近赤外光を照射する。赤外線補助灯3a,3bは、例えば、可視光を照射する前照灯などのランプに可視光カットフィルタを装着することによって実現できるが、近赤外光LED(Light Emitting Diode)を用いてもよい。
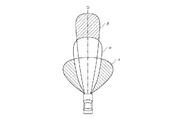
図3は、前照灯2a,2bおよび赤外線補助灯3a,3bの照射パターンの一例を示す図である。前照灯2a,2bは、車両の進行方向と略一致する照射方向Dに可視光(赤外光成分を含む)を照射する。同図に示した領域αは、前照灯2a,2bの照射によって形成される可視光の照射領域である。また、領域βは、一方の赤外線補助灯3aの照射によって形成される赤外光の照射領域である。この照射領域βを形成する補助灯3aは、前照灯2a,2bと同様に照射方向Dに向かって、前照灯2a,2bよりも遠方を照射する。したがって、赤外光の照射領域βは、可視光の照射領域αよりも狭い照射角を有し、かつ、照射領域αよりも遠方に延びている。さらに、領域γは、他方の赤外線補助灯3bの照射によって形成される赤外光の照射領域である。この照射領域γを形成する補助灯3bは、前照灯2a,2bと同様に照射方向Dに向かって、前照灯2a,2bよりも近傍を赤外光で照射する。したがって、赤外光の照射領域γは、可視光の照射領域αよりも広い照射角を有し、かつ、照射幅αよりも近傍に拡がっている。なお、赤外線補助灯3a,3bによって照射される赤外光は、視覚的に認識されない光であるから、自車両、先行車または対向車を運転するドライバーが照射領域β,γのような赤外光の照射を感じることはない。
ステレオカメラ4は、例えば、車内のルームミラー近傍に取り付けられており、車両前方の道路状況や障害物に関する監視情報を取得する。このステレオカメラ4は、赤外光に感光する一対の赤外線カメラ4a,4bによって構成されており、前照灯2a,2bおよび赤外線補助灯3a,3bの照射下において、自車両の前方を撮像する。それぞれのカメラ4a,4bには、CCD(Charge-Coupled Device)センサやCMOS(Complementary Metal-Oxide Semiconductor)センサ等のイメージセンサが内蔵されている。進行方向右側に配置されたメインカメラ4aは、ステレオ画像処理を行う際の基準画像を時系列的に撮像する。これに対して、進行方向左側に配置されたサブカメラ4bは、メインカメラ4aと同期して、比較画像を撮像する。メインカメラ4aから出力されたアナログ信号は、A/Dコンバータ5aによって所定の輝度階調(例えば、256階調のグレースケール)のデジタルデータに変換された後、基準画像データとして画像補正部6に供給される。また、サブカメラ4bから出力されたアナログ信号は、A/Dコンバータ5bによってデジタルデータに変換された後、比較画像データとして画像補正部6に供給される。
画像補正部6は、基準画像データおよび比較画像データに対して、輝度の補正や画像の幾何学的変換などの画像補正を行う。通常、ステレオカメラ4を構成する一対の赤外線カメラ4a,4bの取付位置には、ボディのゆがみ等に起因した誤差が存在するため、撮像された画像にもズレが生じている。このズレを補正するために、アフィン変換等を用いて、画像の回転や平行移動等の幾何学的変換が行われる。このような画像処理を経た後、1フレーム相当の基準画像データおよび比較画像データは、後段のステレオ画像処理部7に出力されるとともに、画像データメモリ8に保存される。
ステレオ画像処理部7は、基準画像データと比較画像データとに基づいて、1フレーム相当の撮像画像に関する距離データを算出する。ここで、「距離データ」とは、画像データによって規定される画像平面において小領域(例えば4×4画素)毎に算出された視差dの集合である。基準画像におけるある画素ブロック(相関元)の視差dを算出する場合、この画素ブロックの輝度特性と相関を有する領域(相関先)を比較画像において特定する。周知のように、ステレオカメラ4から対象物までの距離は、基準画像と比較画像との間における水平方向のズレ量として現れる。したがって、比較画像において相関先を探索する場合、相関元となる画素ブロックと同じ水平線(エピポーラライン)上を探索すればよい。また、2つの画素ブロックの相関は、例えばシティブロック距離を算出することにより評価することができ、その値が最小となる画素ブロックが相関先と判断される。そして、特定された相関先と相関元との間のズレ量が視差dとなる。このような処理を経て算出された距離データ、すなわち、画像平面上の位置と対応付けられた視差dの集合が、距離データメモリ9に保存される。
マイクロコンピュータ10は、距離データメモリ9に保存された距離データをベースとし、必要に応じて、画像データメモリ8に保存された画像データを参照しながら、自車両の前方に存在する対象物(例えば、先行車や歩行者等)を認識・監視する。なお、具体的な対象物の認識・監視手法については、本願出願人が既に多数の出願において開示しているので、ここでの説明を省略する。マイクロコンピュータ10は、例えば、認識された対象物に関する実空間上の位置を表示部11にリアルタイムで表示してもよい。また、マイクロコンピュータ10は、認識された対象物の挙動や自車両までの距離等をモニタリングし、必要に応じて、ABS12(アンチロック・ブレーキ・システム)、AT13(自動変速機)またはエンジン14を通じた車両の制動制御を行ってもよい。
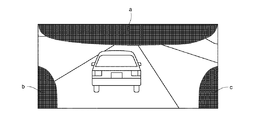
このように、本実施形態では、複数の赤外線補助灯3a,3bを用いて、前照灯2a,2bよりも遠方を赤外線で照射するとともに、前照灯2a,2bよりも広い照射角で近傍を赤外線で照射している。したがって、前照灯2a,2bのみの照射時と比較して、夜間走行時であっても広範囲な監視領域を確保できる。この点を図4および図5を比較しながら詳述する。図4は、前照灯2a,2bのみの照射時における監視領域の図であり、図5は、前照灯2a,2bおよび赤外線補助灯3a,3bの併用時における監視領域の説明図である。前者の場合、実際に有効な監視領域は、矩形で示した枠内の全体ではなく、図3に示した可視光の照射領域αに対応する領域に限定されてしまうケースが生じ得る。このケースにおいて、それ以外の領域a,b,cは、監視制御上、対象物を認識できないマスク領域になってしまう。したがって、例えば、遠方領域aに先行車が存在する場合、監視制御上、これを対象物として認識できないことがある。同様に、自車両の左右近傍b,cに歩行者が存在する場合、これを対象物として認識できないことがある。このようなケースは、自車両の前照灯以外に光源が殆ど存在しないような極暗下において顕著になる。
これに対して、後者の場合では、前照灯2a,2bのみならず赤外線補助灯3a,3bも照射されているので、図4のようなマスク領域a,b,cの発生を有効に抑制することができる。したがって、可視光の照射領域αに含まれない程遠方に先行車が存在する場合であっても、これが赤外光の照射領域β内に存在する限り、対象物として有効に認識することができる。また、可視光の照射領域αに含まれない左右近傍b,cに歩行者が存在する場合であっても、これが赤外光の照射領域γ内に存在する限り、対象物として有効に認識することができる。このように、前照灯2a,2bのみの照射時に確保される監視領域を遠方および近傍の双方に拡大することで、夜間走行時における監視精度の一層の向上を図ることができる。
また、本実施形態によれば、複数の赤外線補助灯3a,3bを用いることで、光学系を複雑化させることなく簡単に、広範囲な監視領域を確保することができる。一般に、単一光源の場合、照射角および照射距離といった2つの照射特性は相反する関係にあり、照射角を広げれば照射距離が短くなり、逆に照射距離を長くすれば照射角が狭くなる。この点は、特許文献2に開示された前照灯(赤外線の単一光源)についても同様である。本実施形態では、複数の赤外線補助灯3a,3bの照射特性を変えて、一方の照射特性で他方の照射特性を補完することにより、照射角と照射距離との両立を図っている。
なお、このような補完にて照射角と照射距離とを両立させる照射パターンは、図3に限定されるものではなく、それ以外の照射パターンであってもよい。図6は、前照灯2a,2bおよび赤外線補助灯3a,3bの照射パターンの別の一例を示す図である。前照灯2a,2bは、車両の進行方向と略一致する照射方向D1に可視光を照射する。同図に示した領域αは、前照灯2a,2bの照射によって形成される可視光の照射領域である。また、領域βは、一方の赤外線補助灯3aの照射によって形成される赤外光の照射領域である。この補助灯3aは、前照灯2a,2bの照射方向D1よりも角度θ1だけ右側にずれた照射方向D2に向かって、赤外光を照射する。したがって、赤外光の照射領域βは、自車両の近傍では照射領域αよりも右側にはみ出ており、かつ、照射領域αよりも遠方に延びている。さらに、領域γは、他方の赤外線補助灯3bの照射によって形成される赤外光の照射領域である。この補助灯3bは、前照灯2a,2bの照射方向D1よりも角度θ2だけ左側にずれた照射方向D3に向かって、赤外光を照射する。したがって、赤外光の照射領域γは、自車両の近傍では照射領域αよりも左側にはみ出ており、かつ、照射領域αよりも遠方に延びている。
また、上述した実施形態では、2つの赤外線補助灯3a,3bを用いた例について説明したが、3つ以上の赤外線補助灯を用いても構わないのは当然である。
さらに、上述した実施形態では、投光器として前照灯2a,2bに着目し、自車両の前方に設定される監視領域の拡大を図る構成例について説明したが、本発明はこれに限定されるものではなく、自車両の周辺を照射する投光器に対して広く適用可能である。例えば、自車両後方を照射する後退灯に着目し、これと補助灯3a,3bとを併用することによって、自車両の後方の監視領域の拡大を図るといった如くである。
1 ステレオ式車外監視装置
2a,2b 前照灯
3a,3b 赤外線補助灯
4 ステレオカメラ
4a,4b 赤外線カメラ
5a,5b A/Dコンバータ
6 画像補正部
7 ステレオ画像処理部
8 画像データメモリ
9 距離データメモリ
10 マイクロコンピュータ
11 表示部
12 ABS
13 AT
14 エンジン
2a,2b 前照灯
3a,3b 赤外線補助灯
4 ステレオカメラ
4a,4b 赤外線カメラ
5a,5b A/Dコンバータ
6 画像補正部
7 ステレオ画像処理部
8 画像データメモリ
9 距離データメモリ
10 マイクロコンピュータ
11 表示部
12 ABS
13 AT
14 エンジン
Claims (4)
- ステレオ式車外監視装置において、
自車両の周辺を照射する投光器と、
前記投光器のみの照射時よりも広い監視領域を確保するために、前記投光器よりも遠方を赤外線で照射するとともに、前記投光器よりも広い照射角で前記投光器よりも近傍を赤外線で照射する複数の赤外線補助灯と、
一対の赤外線カメラによって構成され、少なくとも前記赤外線補助灯の照射範囲を撮像するステレオカメラと、
前記ステレオカメラから出力された一対の撮像画像に基づいて、ステレオマッチングを用いて、距離データを算出するステレオ画像処理部と、
前記ステレオ画像処理部から出力された前記距離データに基づいて、前記自車両の周辺に存在する対象物を監視する監視部と
を有することを特徴とするステレオ式車外監視装置。 - ステレオ式車外監視装置において、
自車両の周辺を照射する投光器と、
前記投光器よりも遠方を赤外光で照射する第1の赤外線補助灯と、
前記投光器より広い照射角で前記投光器よりも近傍を赤外光で照射する第2の赤外線補助灯と、
一対の赤外線カメラによって構成され、少なくとも前記第1の赤外線補助灯の照射範囲および前記第2の赤外線補助灯の照射範囲を撮像するステレオカメラと、
前記ステレオカメラから出力された一対の撮像画像に基づいて、ステレオマッチングを用いて、距離データを算出するステレオ画像処理部と、
前記ステレオ画像処理部から出力された前記距離データに基づいて、前記自車両の周辺に存在する対象物を監視する監視部と
を有することを特徴とするステレオ式車外監視装置。 - ステレオ式車外監視装置において、
自車両の周囲を照射する投光器と、
前記投光器の照射方向よりも右側に向けて、前記投光器よりも遠方を赤外光で照射する第1の赤外線補助灯と、
前記投光器の照射方向よりも左側に向けて、前記投光器よりも遠方を赤外光で照射する第2の赤外線補助灯と、
一対の赤外線カメラによって構成され、少なくとも前記第1の赤外線補助灯の照射範囲および前記第2の赤外線補助灯の照射範囲を撮像するステレオカメラと、
前記ステレオカメラから出力された一対の撮像画像に基づいて、ステレオマッチングを用いて、距離データを算出するステレオ画像処理部と、
前記ステレオ画像処理部から出力された前記距離データに基づいて、前記自車両の周辺に存在する対象物を監視する監視部と
を有することを特徴とするステレオ式車外監視装置。 - 前記投光器は、前記自車両の前部の左右にそれぞれ取り付けられた一対の前照灯であることを特徴とする請求項1から3のいずれかに記載されたステレオ式車外監視装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004175198A JP2005350010A (ja) | 2004-06-14 | 2004-06-14 | ステレオ式車外監視装置 |
| US11/148,202 US20060018513A1 (en) | 2004-06-14 | 2005-06-09 | Stereo vehicle-exterior monitoring apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004175198A JP2005350010A (ja) | 2004-06-14 | 2004-06-14 | ステレオ式車外監視装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005350010A true JP2005350010A (ja) | 2005-12-22 |
Family
ID=35584828
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004175198A Pending JP2005350010A (ja) | 2004-06-14 | 2004-06-14 | ステレオ式車外監視装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20060018513A1 (ja) |
| JP (1) | JP2005350010A (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010000860A (ja) * | 2008-06-19 | 2010-01-07 | Toyota Motor Corp | 車両用撮像照明装置 |
| JP2012216125A (ja) * | 2011-04-01 | 2012-11-08 | Nec Corp | 物体検出方法、物体検出装置および物体検出プログラム |
| WO2013172398A1 (ja) * | 2012-05-16 | 2013-11-21 | 株式会社デンソー | 車両の灯火を検出する装置及びその方法 |
| EP2993645A2 (en) | 2014-09-02 | 2016-03-09 | Nintendo Co., Ltd. | Image processing program, information processing system, information processing apparatus, and image processing method |
| JP2016182911A (ja) * | 2015-03-26 | 2016-10-20 | 日本電産コパル株式会社 | 車両用の視認補助装置および車両 |
| CN106864351A (zh) * | 2017-01-17 | 2017-06-20 | 盐城师范学院 | 一种基于计算机视觉的夜间车辆行驶辅助照明系统 |
| KR101857139B1 (ko) * | 2017-12-20 | 2018-05-11 | 엘아이지넥스원 주식회사 | 이동형 레이더의 표적 탐색 방법 |
| KR101857138B1 (ko) | 2017-12-20 | 2018-05-11 | 엘아이지넥스원 주식회사 | 이동형 레이더의 표적 탐색 장치 |
| JP2020032760A (ja) * | 2018-08-27 | 2020-03-05 | 株式会社小糸製作所 | 車両用灯具システム、左ヘッドランプと右ヘッドランプのペア |
| JP2023505027A (ja) * | 2019-12-09 | 2023-02-08 | ツェットカーヴェー グループ ゲーエムベーハー | 自動車の周囲を監視するためのシステム |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4691508B2 (ja) * | 2004-11-15 | 2011-06-01 | 日立オートモティブシステムズ株式会社 | ステレオカメラ |
| US8947531B2 (en) * | 2006-06-19 | 2015-02-03 | Oshkosh Corporation | Vehicle diagnostics based on information communicated between vehicles |
| US8139109B2 (en) * | 2006-06-19 | 2012-03-20 | Oshkosh Corporation | Vision system for an autonomous vehicle |
| US8553100B2 (en) * | 2006-08-21 | 2013-10-08 | Xylem Ip Holdings Llc | Spotlight with integral low lux video camera system |
| DE102007001558A1 (de) * | 2007-01-10 | 2008-07-17 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Ansteuern einer Nahbereich-Ausleuchtungsvorrichtung für ein Fahrerassistenzsystem eines Kraftfahrzeugs |
| CN101470806B (zh) * | 2007-12-27 | 2012-06-27 | 东软集团股份有限公司 | 车灯检测方法和装置、感兴趣区域分割方法和装置 |
| DE102008043880A1 (de) * | 2008-11-19 | 2010-05-20 | Robert Bosch Gmbh | Beleuchtungseinheit für ein Fahrzeug, Fahrzeug und Verfahren hierfür |
| US8459619B2 (en) | 2010-10-24 | 2013-06-11 | Oshkosh Corporation | Gas spring control system and method |
| CN101973229B (zh) * | 2010-10-30 | 2012-10-24 | 奇瑞汽车股份有限公司 | 一种自适应坡道辅助照明装置及方法 |
| JP5803185B2 (ja) * | 2011-03-23 | 2015-11-04 | アイシン精機株式会社 | リアスポイラー |
| CA2916062C (en) | 2014-04-18 | 2020-08-11 | Cnh Industrial America Llc | Stereo vision for sensing vehicles operating environment |
| DE102014115292A1 (de) * | 2014-10-21 | 2016-04-21 | Connaught Electronics Ltd. | Verfahren zum Bereitstellen von Bilddateien von einem Kamerasystem, Kamerasystem und Kraftfahrzeug |
| JP2016096430A (ja) * | 2014-11-13 | 2016-05-26 | パナソニックIpマネジメント株式会社 | 撮像装置及び撮像方法 |
| KR101908423B1 (ko) * | 2017-04-10 | 2018-10-16 | 엘지전자 주식회사 | 차량에 구비된 차량 제어 장치 및 그것의 차량 제어 방법 |
| US10643342B2 (en) | 2018-02-08 | 2020-05-05 | Huawei Technologies Co., Ltd. | Group optimization depth information method and system for constructing a 3D feature map |
| US11167688B2 (en) | 2018-10-17 | 2021-11-09 | Magna Mirrors Of America, Inc. | Dual mode illumination module for vehicle |
| US11076102B2 (en) | 2019-09-24 | 2021-07-27 | Seek Thermal, Inc. | Thermal imaging system with multiple selectable viewing angles and fields of view for vehicle applications |
| US11891057B2 (en) | 2019-09-24 | 2024-02-06 | Seek Thermal, Inc. | Thermal imaging system with multiple selectable viewing angles and fields of view for vehicle applications |
| US20220182529A1 (en) * | 2020-12-08 | 2022-06-09 | Williamsrdm, Inc. | Remotely triggered infrared spotlight system and method of use |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4805015A (en) * | 1986-09-04 | 1989-02-14 | Copeland J William | Airborne stereoscopic imaging system |
| JP2001344597A (ja) * | 2000-05-30 | 2001-12-14 | Fuji Heavy Ind Ltd | 融合視界装置 |
| US20020130953A1 (en) * | 2001-03-13 | 2002-09-19 | John Riconda | Enhanced display of environmental navigation features to vehicle operator |
| JP2003123520A (ja) * | 2001-10-18 | 2003-04-25 | Koito Mfg Co Ltd | 赤外光照射ランプ兼用投射型前照灯 |
| DE10301468B4 (de) * | 2002-01-18 | 2010-08-05 | Honda Giken Kogyo K.K. | Vorrichtung zur Beobachtung der Umgebung eines Fahrzeugs |
| US7221777B2 (en) * | 2002-07-02 | 2007-05-22 | Honda Giken Kogyo Kabushiki Kaisha | Image analysis device |
| DE10242262A1 (de) * | 2002-09-12 | 2004-03-25 | Daimlerchrysler Ag | Stereo-Nachtsichtsystem für Fahrzeuge |
| JP3987048B2 (ja) * | 2003-03-20 | 2007-10-03 | 本田技研工業株式会社 | 車両周辺監視装置 |
| JP3922245B2 (ja) * | 2003-11-20 | 2007-05-30 | 日産自動車株式会社 | 車両周辺監視装置および方法 |
-
2004
- 2004-06-14 JP JP2004175198A patent/JP2005350010A/ja active Pending
-
2005
- 2005-06-09 US US11/148,202 patent/US20060018513A1/en not_active Abandoned
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010000860A (ja) * | 2008-06-19 | 2010-01-07 | Toyota Motor Corp | 車両用撮像照明装置 |
| JP2012216125A (ja) * | 2011-04-01 | 2012-11-08 | Nec Corp | 物体検出方法、物体検出装置および物体検出プログラム |
| WO2013172398A1 (ja) * | 2012-05-16 | 2013-11-21 | 株式会社デンソー | 車両の灯火を検出する装置及びその方法 |
| JP2013237389A (ja) * | 2012-05-16 | 2013-11-28 | Denso Corp | 灯火検出装置及び車両制御システム |
| US10348983B2 (en) | 2014-09-02 | 2019-07-09 | Nintendo Co., Ltd. | Non-transitory storage medium encoded with computer readable image processing program, information processing system, information processing apparatus, and image processing method for determining a position of a subject in an obtained infrared image |
| EP2993645A2 (en) | 2014-09-02 | 2016-03-09 | Nintendo Co., Ltd. | Image processing program, information processing system, information processing apparatus, and image processing method |
| JP2016182911A (ja) * | 2015-03-26 | 2016-10-20 | 日本電産コパル株式会社 | 車両用の視認補助装置および車両 |
| CN106864351A (zh) * | 2017-01-17 | 2017-06-20 | 盐城师范学院 | 一种基于计算机视觉的夜间车辆行驶辅助照明系统 |
| KR101857139B1 (ko) * | 2017-12-20 | 2018-05-11 | 엘아이지넥스원 주식회사 | 이동형 레이더의 표적 탐색 방법 |
| KR101857138B1 (ko) | 2017-12-20 | 2018-05-11 | 엘아이지넥스원 주식회사 | 이동형 레이더의 표적 탐색 장치 |
| JP2020032760A (ja) * | 2018-08-27 | 2020-03-05 | 株式会社小糸製作所 | 車両用灯具システム、左ヘッドランプと右ヘッドランプのペア |
| CN110861570A (zh) * | 2018-08-27 | 2020-03-06 | 株式会社小糸制作所 | 车辆用灯具系统、成对的左前大灯和右前大灯 |
| JP7165536B2 (ja) | 2018-08-27 | 2022-11-04 | 株式会社小糸製作所 | 車両用灯具システム |
| JP2023505027A (ja) * | 2019-12-09 | 2023-02-08 | ツェットカーヴェー グループ ゲーエムベーハー | 自動車の周囲を監視するためのシステム |
| JP7400102B2 (ja) | 2019-12-09 | 2023-12-18 | ツェットカーヴェー グループ ゲーエムベーハー | 自動車の周囲を監視するためのシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20060018513A1 (en) | 2006-01-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005350010A (ja) | ステレオ式車外監視装置 | |
| JP5680573B2 (ja) | 車両の走行環境認識装置 | |
| JP5617999B2 (ja) | 車載周辺物認識装置及びこれを用いる運転支援装置 | |
| JP5324310B2 (ja) | 車載照明装置、画像処理装置及び画像表示システム | |
| CN110087946B (zh) | 车辆用照明系统和车辆 | |
| EP3489086B1 (en) | Controlling device for vehicle headlight, lighting system and method of controlling vehicle headlight | |
| CN113544011B (zh) | 用于控制机动车辆前灯的方法和装置 | |
| US20150358540A1 (en) | Method and device for generating a surround-view image of the surroundings of a vehicle, method for providing at least one driver-assistance function for a vehicle, surround-view system for a vehicle | |
| CN110834580B (zh) | 前照灯的配光控制系统,配光控制装置,配光控制方法 | |
| WO2018079408A1 (ja) | 車両用ヘッドライト制御装置 | |
| JP4927647B2 (ja) | 車両周辺監視装置 | |
| WO2012014266A1 (ja) | 障害物検知システム及び方法、障害物検知装置 | |
| US20260034927A1 (en) | Vehicular headlight | |
| CN112896035A (zh) | 车辆用投光控制装置及方法、车辆用投光系统 | |
| JP2016182911A (ja) | 車両用の視認補助装置および車両 | |
| WO2015151404A1 (ja) | 後方状況表示装置、後方状況表示方法 | |
| CN111971527A (zh) | 摄像装置 | |
| CN105365659A (zh) | 照射系统 | |
| JP5712821B2 (ja) | 撮影表示制御システム | |
| JP5716944B2 (ja) | 車載カメラ装置 | |
| CN114762325B (zh) | 用于监控机动车的环境的系统 | |
| JP6322723B2 (ja) | 撮像装置および車両 | |
| JP4731177B2 (ja) | 車両の赤外線撮影表示装置及び赤外線撮影表示方法 | |
| JP7084223B2 (ja) | 画像処理装置および車両用灯具 | |
| WO2022196296A1 (ja) | 車両用灯具の制御装置、車両用灯具の制御方法、車両用灯具システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070525 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090428 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20091006 |