JP2006006003A - 偏平モータ - Google Patents
偏平モータ Download PDFInfo
- Publication number
- JP2006006003A JP2006006003A JP2004178198A JP2004178198A JP2006006003A JP 2006006003 A JP2006006003 A JP 2006006003A JP 2004178198 A JP2004178198 A JP 2004178198A JP 2004178198 A JP2004178198 A JP 2004178198A JP 2006006003 A JP2006006003 A JP 2006006003A
- Authority
- JP
- Japan
- Prior art keywords
- magnet
- coil
- flat motor
- motor
- stator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000002093 peripheral effect Effects 0.000 abstract description 25
- 230000004048 modification Effects 0.000 description 17
- 238000012986 modification Methods 0.000 description 17
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 5
- 239000011889 copper foil Substances 0.000 description 5
- 229910001172 neodymium magnet Inorganic materials 0.000 description 4
- QJVKUMXDEUEQLH-UHFFFAOYSA-N [B].[Fe].[Nd] Chemical compound [B].[Fe].[Nd] QJVKUMXDEUEQLH-UHFFFAOYSA-N 0.000 description 2
- 239000000696 magnetic material Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 229910052761 rare earth metal Inorganic materials 0.000 description 2
- 150000002910 rare earth metals Chemical class 0.000 description 2
- 229910000976 Electrical steel Inorganic materials 0.000 description 1
- 229910001335 Galvanized steel Inorganic materials 0.000 description 1
- BGPVFRJUHWVFKM-UHFFFAOYSA-N N1=C2C=CC=CC2=[N+]([O-])C1(CC1)CCC21N=C1C=CC=CC1=[N+]2[O-] Chemical compound N1=C2C=CC=CC2=[N+]([O-])C1(CC1)CCC21N=C1C=CC=CC1=[N+]2[O-] BGPVFRJUHWVFKM-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 239000008397 galvanized steel Substances 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
Images








Landscapes
- Permanent Magnet Type Synchronous Machine (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
Abstract
【解決手段】 平面上に複数の駆動コイル(2)を配置したステータヨーク(1)を有するステータ(51)と、駆動コイル(2)に対向するように環状のマグネット(3,3A〜3D)を配置したロータヨーク(4,4B,4D)を有しステータ(51)に対して回転するロータ(52)と、を備え、マグネット(3,3A〜3D)における駆動コイル(2)と対向する面(3a,3Aa〜3Da)の少なくとも外周側に、回転中心から遠ざかるに従って駆動コイル(2)から離れる間隙拡大部(3Aa2,3Ca2)を設けた。
【選択図】 図1
Description
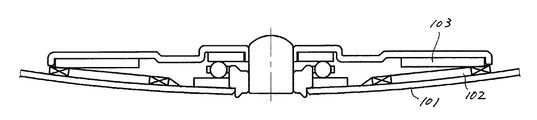
シャフト105には、ロータヨーク104が固定されており、ロータヨーク104の内面にはコイル102と間隙Gを有して対向するようにマグネット103が固定されている。
この構成においてコイル102へ通電することによって、シャフト105,ロータヨーク104及びマグネット103からなるロータは、バックヨーク101に対して回転する。
上述した偏平モータをより薄型化する方法の1つとして、コイルとマグネットとの間の間隙Gを可能な限り小さくすることが追求されている。
そのため、図9に示すように、バックヨーク101がマグネット103に吸引され、そのマグネット103側に向かって変形する。
従って、コイル102とマグネット103との間隙Gは、バックヨーク101の外周側で狭くなり、場合によっては当図のように間隙がなくなり両者が接触してしまうという状態が発生していた。
これらの偏平モータによれば、間隙をより小さくすることができ、モータの薄型化が効果的に可能となる。
即ち、請求項1に係る発明は、平面上に複数の駆動コイル(2)を配置したステータヨーク(1)を有するステータ(51)と、前記駆動コイル(2)に対向するように環状のマグネット(3,3A〜3D)を配置したロータヨーク(4,4B,4D)を有し前記ステータ(51)に対して回転するロータ(52)と、を備え、前記マグネット(3,3A〜3D)の前記駆動コイル(2)と対向する面(3a,3Aa〜3Da)に、回転中心から遠ざかるに従って前記駆動コイル(2)から離れる間隙拡大部(3Aa2,3Ca2)を設けて成ることを特徴とする偏平モータ(55)である。
図1は、本発明の偏平モータの実施例を示す断面図であり、
図2は、本発明の偏平モータの実施例を説明する断面図であり、
図3は、本発明の偏平モータの第1の変形例を説明する要部断面図であり、
図4は、本発明の偏平モータの第2の変形例を説明する要部断面図であり、
図5は、本発明の偏平モータの第3の変形例を説明する要部断面図であり、
図6は、本発明の偏平モータの第4の変形例を説明する要部断面図であり、
図7は、本発明の偏平モータの実施例における外観を示す斜視図である。
この偏平モータ55は、ステータヨークであるバックヨーク1と、これに固定された軸受6及びコイル2とを有するステータ51と、シャフト5,これに固定されたロータヨーク4及びロータヨーク4に固定されたマグネット3を有するロータ52とを備えている。
そのほぼ中央にはシャフト5を軸支する軸受6が固定されている。
バックヨーク1の一面には、銅箔の回路パターン1aが形成され、その回路パターン1aの表面は絶縁処理されている。
回路パターン1a上には、軸受6の軸を中心とした同心状に複数のコイル2が配置されている。
ロータヨーク4の内側面には、コイル2と所定の間隙G(G1〜G2)を有して対向するように平たい環状のマグネット3が固着されている。この間隙Gについては、詳細を後述する。マグネット3は、Nd−Fe−B(ネオジウム−鉄−ボロン)系希土類硬質磁性材料で形成される。
この構成で、コイル2に所定の方法で電流が付与されることで、ロータ52はステータ51に対して回転する。
実施例におけるマグネット3は、図1に示すように、断面が台形形状になっている。
具体的には、軸方向の厚さにおいて外周側の厚さの方が内周側の厚さより薄く、コイル2と対向する対向面3aが外周側に向かうに従ってコイル2から離れる方向に傾斜した形状の台形断面とされている。このマグネット3の内周側及び外周側におけるコイル2との間隙Gは、G1及びG2である。
そして、このマグネット3の外周側の厚さと内周側の厚さとの差(以下、厚み差と称する)を図1ではΔgとして示している。
以下、変形例のいくつかを説明するが、上述の実施例や以下の変形例に限るものではなく、要旨を逸脱しない範囲において種々の変形が可能である。
この例は、マグネット3Aの対向面3Aaが、磁気吸引がないとした場合に、コイルと一定の間隙を有する内周部3Aa1と、コイル2から離れる方向に傾斜する傾斜部3Aa2とを有するものである。
この形状のマグネット3Aは、マグネット単体で保管する場合に安定して重ねられ、また、内周部3Aa1と傾斜部3Aa2との境界線3Acが明瞭に形成されるので、表裏の判別が容易となるものである。
実用上は、以下の(式1)の範囲で設定すればマグネット3と同等のトルク性能が発揮されるので望ましい。
即ち、境界線3Acの半径r2は、マグネット3Aの内径r1と外径r3に対して、
r2≦r1+0.7×(r3−r1)…(式1)
の範囲に設定するのが望ましい。
この例は、マグネット3Bの対向面3Baと、その反対側の面3Bbとを傾斜面とした例である。
従って、ロータヨーク4Bも面3Bbに合わせて外周側をコイル2側に近づく形状に形成してあり、外周部でのモータ全体の厚さを薄くしたい場合に好適である。
この形状のマグネット3Bは、対向面3Baとその反対側の面3Bbの傾斜量Δg1(図4参照)を同じにした場合、取り付けにおいて表裏の方向判別が不要となり作業が極めて容易となる。
この例は、マグネット3Cを、第2の変形例のマグネット3Bに対して第1の変形例のように、内周部3Ca1と傾斜部3Ca2とを、対向面3Caとその反対側の面3Cbの両方に設けたマグネットとした例である。
この変形例も、第2の変形例と同様に、ロータヨーク4Cも傾斜部3Cb2に合わせて外周側をコイル2側に近づける形状に形成しているので、外周部側のモータ全体の厚さを薄くしたい場合に好適である。
この例は、マグネット3Dの厚みを一定にし、コイル2との間隙が外周側でΔg2だけ広がるように、ロータヨーク4Dをコイル2から離れる方向にΔg2変形させると共に、それに沿った形状にマグネット3Dを形成したものである。従って、マグネット3Dの表面形状は、円錐表面の一部となる。
この変形例は、回転中心近傍のモータの厚みを薄くしたい場合に好適である。
マグネット3Dを、可撓性を有する材料(例えばゴム磁石)で形成すれば、ロータヨーク4Dに沿って変形させて固定できるので、好ましい。
1a 回路パターン
2 コイル
2a 対向面
3,3A〜3D マグネット
3a (3Aa〜3Da) 対向面
3Aa1,3Ca1 内周部
3Aa2,3Ca2 傾斜部(間隙拡大部)
3Ac 境界線
3Bb,3Cb (反対側の)面
(3A〜3D) マグネット
4,4B,4D ロータヨーク
5 シャフト
6 軸受
51 ステータ
52 ロータ
55 偏平モータ
G,G1,G2,g1 間隙
Δg 厚み差
Δg1,Δg2 傾斜量
Claims (1)
- 平面上に複数の駆動コイルを配置したステータヨークを有するステータと、
前記駆動コイルに対向するように環状のマグネットを配置したロータヨークを有し前記ステータに対して回転するロータとを備え、
前記マグネットの前記駆動コイルと対向する面に、回転中心から遠ざかるに従って前記コイルから離れる間隙拡大部を設けて成ること特徴とする偏平モータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004178198A JP4342380B2 (ja) | 2004-06-16 | 2004-06-16 | 偏平モータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004178198A JP4342380B2 (ja) | 2004-06-16 | 2004-06-16 | 偏平モータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006006003A true JP2006006003A (ja) | 2006-01-05 |
| JP4342380B2 JP4342380B2 (ja) | 2009-10-14 |
Family
ID=35773929
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004178198A Expired - Fee Related JP4342380B2 (ja) | 2004-06-16 | 2004-06-16 | 偏平モータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4342380B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007330025A (ja) * | 2006-06-07 | 2007-12-20 | Daikin Ind Ltd | モータ |
| JP2008295284A (ja) * | 2007-04-26 | 2008-12-04 | Seiko Epson Corp | ブラシレス電気機械 |
| JP2011125213A (ja) * | 2009-12-08 | 2011-06-23 | Siemens Ag | 電気機械において空隙を保証するための装置 |
| US8319469B2 (en) | 2007-04-26 | 2012-11-27 | Seiko Epson Corporation | Brushless electric machine |
| JP2020522970A (ja) * | 2017-06-05 | 2020-07-30 | イー−サーキット モーターズ, インコーポレイテッド | 軸方向磁束機械内の磁石/ステータ間隙の制御のための予歪ロータ |
| CN114731078A (zh) * | 2019-11-12 | 2022-07-08 | 电路电机有限公司 | 用于轴向通量型电机的改进的转子组件 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105006898B (zh) * | 2015-07-30 | 2017-10-03 | 浙江西子富沃德电机有限公司 | 一种盘式永磁电机及其磁钢 |
-
2004
- 2004-06-16 JP JP2004178198A patent/JP4342380B2/ja not_active Expired - Fee Related
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007330025A (ja) * | 2006-06-07 | 2007-12-20 | Daikin Ind Ltd | モータ |
| JP2008295284A (ja) * | 2007-04-26 | 2008-12-04 | Seiko Epson Corp | ブラシレス電気機械 |
| US8319469B2 (en) | 2007-04-26 | 2012-11-27 | Seiko Epson Corporation | Brushless electric machine |
| US8581459B2 (en) | 2007-04-26 | 2013-11-12 | Seiko Epson Corporation | Brushless electric machine |
| JP2011125213A (ja) * | 2009-12-08 | 2011-06-23 | Siemens Ag | 電気機械において空隙を保証するための装置 |
| JP2020522970A (ja) * | 2017-06-05 | 2020-07-30 | イー−サーキット モーターズ, インコーポレイテッド | 軸方向磁束機械内の磁石/ステータ間隙の制御のための予歪ロータ |
| JP7369382B2 (ja) | 2017-06-05 | 2023-10-26 | イー-サーキット モーターズ, インコーポレイテッド | 軸方向磁束機械内の磁石/ステータ間隙の制御のための予歪ロータ |
| CN114731078A (zh) * | 2019-11-12 | 2022-07-08 | 电路电机有限公司 | 用于轴向通量型电机的改进的转子组件 |
| AU2020382759B2 (en) * | 2019-11-12 | 2024-10-24 | E-Circuit Motors, Inc. | Improved rotor assemblies for axial flux machines |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4342380B2 (ja) | 2009-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7420309B2 (en) | Spindle motor | |
| EP1026809A2 (en) | Stator structure of highspeed motor | |
| JP2004015906A (ja) | 永久磁石形モータ | |
| US20100259122A1 (en) | Magnetic member, motor device, magnetizing method, and storage device | |
| US6661150B2 (en) | Motor having stator with L-shaped salient poles | |
| US8878416B2 (en) | Stator core and motor device including the same | |
| JP4342380B2 (ja) | 偏平モータ | |
| EP1202430A1 (en) | Brushless motor | |
| US20050006965A1 (en) | Rotational driving device | |
| JP2002204542A (ja) | 軸方向空隙型モータ用永久磁石、同磁石の着磁方法と着磁装置及び同磁石を備えた軸方向空隙型モータ | |
| JPH09285092A (ja) | 薄型dcブラシレスモータ | |
| JP3686065B2 (ja) | モータおよび記録媒体駆動装置 | |
| JPH07245926A (ja) | ブラシレスモータ | |
| JP5311020B2 (ja) | スピンドルモータ | |
| JP4959389B2 (ja) | モータ | |
| JPH07123672A (ja) | モータ | |
| JP2005253164A (ja) | モータ | |
| JP2005237161A (ja) | 永久磁石モータ | |
| JP2010035268A (ja) | アキシャルギャップ型モータ | |
| JP2005080344A (ja) | 永久磁石式回転子 | |
| JP2006340430A (ja) | ブラシレスモータの着磁装置および着磁方法 | |
| JPH07230663A (ja) | ディスクファイル装置用スピンドルモータ | |
| JP2005253275A (ja) | 電動機の回転子およびこれに用いられるエンドプレート | |
| JP5163341B2 (ja) | アキシャルギャップ型モータ | |
| JP2005160131A (ja) | 回転電動機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060630 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20080401 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20080428 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090415 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090421 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090528 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090630 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090707 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120717 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130717 Year of fee payment: 4 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |