JP2006014094A - 画像処理装置、画像読取装置、画像形成装置、カラー複写装置、画像処理プログラム及び記録媒体 - Google Patents
画像処理装置、画像読取装置、画像形成装置、カラー複写装置、画像処理プログラム及び記録媒体 Download PDFInfo
- Publication number
- JP2006014094A JP2006014094A JP2004190446A JP2004190446A JP2006014094A JP 2006014094 A JP2006014094 A JP 2006014094A JP 2004190446 A JP2004190446 A JP 2004190446A JP 2004190446 A JP2004190446 A JP 2004190446A JP 2006014094 A JP2006014094 A JP 2006014094A
- Authority
- JP
- Japan
- Prior art keywords
- pixel
- color
- white
- image
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






























Landscapes
- Image Processing (AREA)
- Facsimile Image Signal Circuits (AREA)
- Color Image Communication Systems (AREA)
Abstract
【解決手段】 画像データのRGB入力手段と、R,G,Bの1色を基準として同一画素位置の基準色と基準色以外の色の濃度差を検出する濃度差検出手段と、濃度検出手段を周辺画素に対して行う周辺画素濃度検出手段と、基準画素と以外の2つ色に対して仮想的に位置をずらした画素を2つ以上算出する仮想画素算出手段と、仮想画素算出手段により、求めたデータすべてに対して、注目画素の基準色との濃度差を演算する注目画素濃度差検出手段と、上記注目画素濃度検出の結果と、周辺画素濃度検出手段の算出結果に基づいて仮想画素検出手段の結果のデータで画像データを補正する画像補正手段と、を備える。
【選択図】 図4
Description
また、平滑化される色信号の微分値を算出し、微分色信号を基準レベル値と比較し、エッジ部画像の展開幅を検出し、展開幅を用いて形状特徴を算出することにより、色ずれの補正処理を正確にするものやエッヂ部の形状により補正するものがある(例えば、特許文献2、3及び4参照)。しかし、特許文献2〜4記載の発明は、特徴を算出するために、広い領域を見てハード規模も大きくなってしまう。
また、シェーディング板付近に黒線を書き、黒線を基準に補正を行っているものがある(例えば、特許文献5参照)。しかし、特許文献5記載の発明は、基準線で行っているために過渡的振動に対応できないし、位置ずれに関する情報を記憶するメモリが必要になる。
また、副走査方向に基準の黒線に対して補正を行うものがある(例えば、特許文献6参照)。しかし、特許文献6記載の発明は、主走査に適用しようとすると、基準線で行っているために過渡的振動に対応できないし、位置ずれに関する情報を記憶するメモリが必要になる。
また、予め記憶している関数に基づいて補正するものがある(例えば、特許文献7参照)。しかし、特許文献7記載の発明は、記憶している関数は黒線なので色文字に関しては効果不明である。
また、目標濃度を決めて補正を行う発明もあるが、補正する際に、複数の仮想画素を算出してその中から目標濃度に内輪で近いものを選択する。複数の仮想画素を求めなければならない。
C/P信号:2ビット信号であり、3が低線数網点領域を示し、2が網点領域を示し、1が文字エッジ領域を示し、0が絵柄領域を示す。
B/C信号:1ビット信号であり、H(「1」)が無彩領域を示し、L(「0」)が有彩領域を示す。
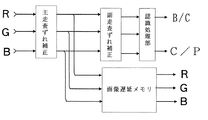
図21に、原稿認識320の機能をブロック区分で示す。
主走査ずれ補正、副走査ずれ補正、認識処理、画像遅延メモリからなり、認識処理部は文字エッジ検出,絵柄検出及び有彩/無彩検出を行って、文字エッジ領域あるいは絵柄領域を表すC/P信号および有彩領域/無彩領域を表すB/C信号を発生し、主走査ずれ補正部では、入力データの主走査のRGB位置ずれを補正して、副走査ずれ補正部では、入力データ副走査のRGB位置ずれを補正する。
主走査ずれ補正は、仮想サンプリング点算出R、仮想サンプリング点算出B、補正演算R、補正演算Bからなる。ここでの補正は、Gを基準色としてRとBを補正する。ここで、仮想サンプリング点算出Rと仮想サンプリング点算出B、補正Rと補正Bは同一機能なので、Rのみについて説明する。
Rデータの1ドットに対して+側と−側に1/2のずらしたRデータを補間演算する。この2個(Dm-1, Dm+1,)とずらしていない原データ(Dm)の3個を出力する。実施例では、位置ずれ補正量は0.5ドットであるが光学特性により決まるものである。
図30に示すように、最初に目標濃度差演算を行う。ここでは、周辺画像データの濃度差を計算する。周辺画像データの参照画素は光学系の特性により決まるがここでは周辺画素左右(主走査)2画素を参照する。注目画素をDnとした時、左右の画素はDn-2、Dn-1、Dn+1、Dn+2とする。以下のすべて条件を満たす画素のR-Gの絶対値を目標濃度差とする。ここで、条件を満たさなければ、目標濃度差なしとして、補正を行わない。
1).RデータのDn-2、Dn-1、Dn、Dn+1、Dn+2の最大値と最小値の差がある閾値以上である。これは、画像データの起伏(エッヂ)があるとのみ補正を行うためである。
2).GデータのDn-2、Dn-1、Dn、Dn+1、Dn+2の最大値と最小値の差がある閾値以上である。これは、画像データの起伏(エッヂ)があるとのみ補正を行うためである。
3).Dn-2、Dn-1、Dn+1、Dn+2、それぞれの画素のR−Gの絶対値を4個を求める。
4).Dn-2、Dn-1、Dn+1、Dn+2のR−Gの絶対値の小さいものから順番にDnのG信号を比較をする。Dn画素のG信号より小さい(濃い)値ならば、目標濃度差とする。
Dn画素のG信号より小さくない時は、その次にR−Gの絶対値の小さいものを順次演算を行う。ここで、目標濃度差が得られなかった時は、Dn画素のR−Gの絶対値とする。
G信号の比較で濃いデータを求めているのは、G信号が輝度信号に近い特性をもっているから、輝度信号で比較しても良い。
濃い画素のデータを使うのは、反射率データの特性で、黒データは、RGB差が非常に少なく、色データはRGB差があるからである。周辺画素より濃度差を決めているので、黒データは理想的にはRGB差は0になる。つまり目標濃度差は色毎に変化する。
1).3個のサンプリング点(Dm-1,Dm,Dm+1)のそれぞれのR−Gの絶対値を3個求める。
2).Dm-1,Dm,Dm+1のR-Gの絶対値の小さい順に目標濃度差と比較する。R-Gの絶対値が目標濃度以上であれば、目標濃度差とする。目標濃度より小さな値の時は、仮想サンプリング点算出でのサンプル数が少ないために本来補正すべき値より補正を行っている可能性があるため以下の条件をチェックする。
2−1).求めた絶対値の目標濃度差より小さい
2−2).G−Dm-1と、G−Dmとの正負の符号が不一致である。符号が逆になっているということは、サンプリング点が少なくて補正が効き過ぎている。
本実施例では、目標濃度差はすべて固定で説明したが、画像データの特性によって濃いところと薄いところで値を変更することも可能である。
Rデータの副走査方向に1ラインに対して+側と−側に1/2、1,2のずらしたRデータを補間演算する。この6個(Dm-3 Dm-2, Dm-1, Dm+1, Dm+2, Dm+3,)とずらしていない原データ(Dm)の7個を出力する。実施例では、位置ずれ補正量は2ドットであるが、これは機械振動などの特性値によって決まるものである。ここで、ずれ量を複数求めるのは、細線の密集したところや小さな文字などの細かくエッヂの変化する領域を正しく補正するためである。
1).RデータのDn-2、Dn-1、Dn、Dn+1、Dn+2の最大値と最小値の差がある閾値以上である。これは、画像データの起伏があるとのみ補正を行うためである。
2).GデータのDn-2、Dn-1、Dn、Dn+1、Dn+2の最大値と最小値の差がある閾値以上である。これは、画像データの起伏があるとのみ補正を行うためである。
3).Dn-2、Dn-1、Dn+1、Dn+2、それぞれの画素のR−Gの絶対値を4個を求める。
4).Dn-2、Dn-1、Dn+1、Dn+2のR−Gの絶対値の小さいものから順番にDnのG信号を比較する。Dn画素のG信号より小さい(濃い)値ならば、目標濃度差とする。
Dn画素のG信号より小さくない時は、その次にR−Gの絶対値の小さいものを順次演算を行う。ここで、目標濃度差が得られなかった時は、Dn画素のR−Gの絶対値とする。
1).7個のサンプリング点(Dm-3 Dm-2, Dm-1, Dm,Dm+1, Dm+2, Dm+3)のそれぞれのR−Gの絶対値を7個求める。
2).Dm-1,Dm,Dm+1のR-Gの絶対値の小さい順に目標濃度差と比較する。R-Gの絶対値が目標濃度以上であれば、目標濃度差とする。目標濃度より小さな値の時は、仮想サンプリング点算出でのサンプル数が少ないために本来補正すべき値より補正を行っている可能性があるため以下の条件をチェックする。
2−1).求めた絶対値の目標濃度差より小さい
2−2).G−Dm-1とG−Dmの正負の符号が不一致である。符号が逆になっているということは、サンプリング点が少なくて補正が効き過ぎている。
上記1、2の条件を満たした時、Gデータに目標濃度差を加えてRデータとして出力する。上記条件を満たさない時は、他のデータの演算を行う。
ここで目標濃度差より、大きい値を選択するのは、色文字の彩度低下を防ぐためである。
フィルタ321は、主に文字のエッジの抽出ために、スキャナ200が発生するG画像データを補正する。ここで、スキャナ200で読み取ったデータは、レンズなどの性能でボケていることがあるので、エッジ強調フィルタをかける。ただ、ここでは、単純に原稿上の像エッジを強調し、複写機に広く普及している、階調表現のための万線パターンを強調しない必要がある。万線パターンを強調してしまうと、絵柄(万線パターンによる階調表現領域)をエッジとして抽出して、最終的に文字エッジと誤判定する可能性があるので、強調しないようにする必要がある。また、図8に示すように、600dpiの万線パターンAと400dpiの万線パターンBは、繰返し周期が異なるので、同一のフィルタ係数で強調しないようにするのは難しい。そのため、後段の特徴量検出(エッジ抽出、白領域検出)に応じて
2つ係数の演算結果の最大値または、最小値のどちらかを使用する。

文字領域は、高レベル濃度の画素と低レベル濃度の画素(以下、黒画素、白画素と呼ぶ)が多く、かつ、エッジ部分では、これらの黒画素及び白画素が連続している。エッジ抽出322は、このような黒画素及び白画素それぞれの連続性に基づいて文字エッジを検出する。
先ず、3値化322aで、2種の閾値TH1およびTH2を用いて、フィルタ321が文字エッジ強調のフィルタ処理をしたG画像データ(エッジ抽出322の入力データ)を3値化する。閾値TH1およびTH2は、例えば、画像データが0から255までの256階調(0=白)を表す場合、例えばTH1=20、TH2=80に設定する。3値化322aでは、入力データ<TH1であると、該データが宛てられる画素を白画素と、TH1≦入力データ<TH2であると中間調画素と、TH2≦入力データであると黒画素と、表す3値化データに入力データを変換する。
黒画素連続検出322bおよび白画素連続検出322cが、3値化データに基づいて、黒画素が連続する箇所および白画素が連続する箇所を、それぞれパターンマッチングにより検出する。このパターンマッチングには、本実施例では、図9に示す3×3画素マトリクスのパターンBPa〜BPdおよびWPa〜WPdを用いる。図9に示すパターンにおいて、黒丸は上述の黒画素であることを示し、白丸は上述の白画素であることを示し、いずれの丸印もない空白画素は、黒画素,中間調画素,白画素のいずれであるか問わないものである。3×3画素マトリクスの中心の画素が注目画素である。
次の近傍画素検出322dは、黒画素連続検出322bおよび白画素連続検出322cの検出結果について、この近傍画素検出322dでの注目画素の近傍に黒連続画素又は白連続画素があるか否かを調べることにより、該注目画素が、エッジ領域と非エッジ領域のいずれにあるかを判定する。より具体的に述べれば、本実施例にあっては、5×5画素マトリクスのブロックで、その内部に黒連続画素と白連続画素がそれぞれ1つ以上存在するときに、そのブロックをエッジ領域と判定し、そうでないときに、そのブロックを非エッジ領域と判定する。
さらに、文字エッジは連続して存在するので、孤立点除去322eにて孤立しているエッジを非エッジ領域に補正する。そして、エッジ領域と判定した画素に対して”1”(エッジ領域)なるedge信号を出力し、非エッジ領域と判定した画素に対して”0”(非エッジ領域)なるedge信号を出力する。
白領域抽出323は、2値化323a,RGB白抽出323b,白判定323c,白パターンマッチング323d,黒判定323e,黒パターンマッチング323fおよび白補正323gからなる。
2値化323aは、フィルタ321の画像濃度データ(G画像データ)のエッジ強調出力を、閾値thwsbで2値化して、白パターンマッチング323d(の処理を表す図5のステップ7)が参照する白データの生成のための2値化白判定信号を発生する。なお、エッジ強調出力は、この実施例では0から255の256階調であり、0が濃度の無い白であり、閾値thwsbの一例は、50であって、エッジ強調出力の値がthwsb=50より小さければ、2値化323aが「2値化白」と判定し2値化白判定信号「1」を発生する。エッジ強調出力の値がthwsb=50以上のときは2値化白判定信号「0」を発生する。
RGB白抽出323bは、1.)RGB白地検出,2.)色地検出および3.)谷白画素検出を行って、画像データが白領域かを判定する。
該RGB白地検出では、R,G,B画像データで白地領域を検出することにより、白背景分離の動作をアクティブにする。すなわち白背景分離の処理を起動する。具体的には、図10のパターンWBPに示すように、3×3画素マトリックスのR,G,B画像データのすべてが閾値thwssより小さければ、注目画素(3×3画素マトリックスの中心画素)が白領域と判定して白パターンマッチング323d(の処理を表す図5のステップ3が参照する白地判定信号)をアクティブ(「1」)にする。これは、ある程度の広がりの白画素領域があるかを検出するものである。なお、R,G,B画像データのそれぞれも、この実施例では0から255の256階調であり、0が濃度の無い基底レベルであり、閾値thwss<thwsbであって、thwssの一例は、40であって、R,G,B画像データのすべてがthwss=40より小さいと、「白地」と判定し白地判定信号「1」を発生する。R,G,B画像データのいずれかがthwss=40以上のときは白地判定信号「0」を発生する。
薄い色を白背景と判定しないようにするために、色地を検出する。
A.ここでは先ず、注目画素を中心とする5×5画素マトリックスの各画素の符号を、図11のパターンMPpに示すものとすると、注目画素となる中心画素c3(MCa〜MCdの×印画素)のRGB差(1画素宛てのR,G,B画像データの最大値と最小値との差)が閾値thcより大きいと色画素判定信号aを「1」(色画素)とし、閾値thc以下のときは「0」(白黒画素)とする。
B.注目画素の片側の周辺画素群△(図11のMCa〜MCdの中)のいずれかの画素のR,G,B画像データがすべて閾値thwc以下であると一方側白判定信号bを「1」(白画素)とし、閾値thwcを超えるときは「0」(非白画素)とする。閾値thwcは例えば20である。
C.注目画素の他方側の周辺画素群□(図11のMCa〜MCdの中)のいずれかの画素のR,G,B画像データがすべて閾値thwc以下であると他方側白判定信号cを「1」(白画素)とし、閾値thwcを超えるときは「0」(非白画素)とする。
D.図11のパターンMCa〜MCdのいずれかにおいて、a AND (bとcのエクスクルーシブノア)=「1」が成立すると、すなわち、a=「1」(注目画素が色画素)、かつ、bとcが一致(注目画素の両側ともに白画素、または、両側ともに非白画素)のとき、注目画素宛ての、色地判定信号dを「1」(色地)とする。この色地判定信号dは、白パターンマッチング323d(の処理を表す図5のステップ6)で、参照される。
次に、谷白画素検出では、上記RGB白地検出で検出できない小さな白領域の谷白画素を、図10に示すG画像データの5×5画素マトリクス分布RDPaおよびRDPbに基づいて検出する。具体的には、5×5画素マトリクス分布RDPaに基づいて、miny=min(G[1][2],G[1][3],G[1][4],G[5][2],G[5][3],G[5][4])を算出する。即ち、図10に示す5×5画素マトリクス分布RDPaの、黒丸を付した画素群の中の最低濃度minyを摘出する。そして、maxy=max(G[3][2],G[3][3],G[3][4])を算出する。即ち、図10に示す5×5画素マトリクス分布RDPaの、白丸を付した画素群の中の最高濃度maxyを摘出する。
ここでは、白判定にもちいる状態変数MS,SS[I]の更新を行う。その内容を図5に示す。ここで、状態変数MSは処理対象ライン(注目ライン)の画素宛てのもの、状態変数SS[I]は処理対象ラインの1ライン前(処理済ライン)の画素宛てのものであり、いずれも白地の白の程度を表す4bitの白地情報であり、図5の処理によって生成されるものである。状態変数MSおよびSS[I]が表す値の最高値は15に定めており、これが最も白い程度を意味し、最低値は0である。すなわち状態変数MSおよびSS[I]は、白の程度を示すデータであり、それが表す値が大きいほど、強い白を意味する。複写動作開始時に、状態変数MSおよびSS[I]は共に0に初期化される。
次に、SS[I−3]<SS[I]−3の時、SS[I−3]=SS[I]−3をラインメモリにセットする(ステップ16,17−14,15)。
注目画素を中心とする5×5画素単位のブロックで連続した白画素が存在するか否かで、背景が白かを判断する。そのために、注目画素に関して、次式が満たされる時に、注目画素を白画素と仮に定めて、白パターンマッチングを行う。
(非色画素&(白地情報MS≧thw1(13))&2値化白)#
(非色画素&(白地情報MS≧thw2(1))&谷白画素&2値化白)
ここで、この条件式を満たすかのチェックを行う注目画素は、図5のステップ5および14〜17の白伝搬処理の対象となってその処理過程を経たものであり、上記条件式の中の「白地情報MS」が、白伝搬処理後の、上記チェックを行う注目画素の白地情報MS[I]である。但し、このMS[I]は白伝搬処理を終えた白地情報であって、そのIは、上記チェックを行う注目画素の主走査方向xの位置であり、上述の白判定323cで状態変数MSを算出する注目画素の主走査方向xの位置とは別物である。
R、G、B、Y、M、C、Bkの色相分割を行い、色相毎に濃度の低いと画素を検出する。色相分割は、後述する色判定と同一である。ここで、フィルタ後のGデータをthgrと比較して、Gデータより大きいかRGB白抽出の色画素検出で色画素であるかのどちらかを満たしていれば、下記の演算を行い、下記条件を満たしていれば、クレー画素とする。ここで、色毎に閾値を変えているのは各インクの最大濃度が異なるためである。
R - 2 * G + B > 0
4.2).YーG色相領域境界(yg)
11 * R - 8 * G - 3 * B > 0
4.3).GーC色相領域境界(gc)
1 * R - 5 * G + 4 * B < 0
4.4).CーB色相領域境界(cb)
8 * R - 14 * G + 6 * B < 0
4.5).BーM色相領域境界(bm)
9 * R - 2 * G - 7 * B < 0
4.6).MーR色相領域境界(mr)
R + 5 * G - 6 * B < 0
4.8).Y画素画素判定(gry)
(色画素である)& (ry == 1) & (yg == 0) & (RGBの最大値 < thmaxy)
4.9).G画素判定(grg)
(色画素である)& (yg == 1) & (gc == 0) & (RGBの最大値 < thmaxg)
4.10).C画素判定(grc)
(色画素である)& (gc == 1) & (cb == 0) & (RGBの最大値 < thmaxc)
4.11).B画素判定(grb)
(色画素である)& (cb == 1) & (bm == 0) & (RGBの最大値 < thmaxb)
4.12).M画素判定(grm)
(色画素である)& (bm == 1) & (mr == 0) &RGBの最大値 < thmaxm)
4.13).R画素判定(grr)
(色画素である)& (mr == 1) & (ry == 0) & (RGBの最大値 < thmaxr)
4.14).色画素でない時(grbk)
(RGBの最大値 < thmaxbk)
4.15).グレー画素判定
4.8)〜4.15)のいずれかの条件を満たす時にグレー画素とする。
図25に示すように、本実施例ではDをグレー画素として、bkはクレー画素より濃いところとして、下記パターンマッチングを行う。複写原稿は、薄い200線の万線パターン、300線の万線であるので、複写原稿もクレー検出するように下記のようなパターンを採用している。下記パターンに一致したものは、グレー画素となる(図26(a)、(b)参照)。
白画素パターンマッチングで孤立(1×1、1×2、2×1、2×2、1×3、3×1の白画素)しているアクティブ画素を非アクティブにする。このことにより、孤立している画素を除去する。
5.)白膨張
白画素パターンマッチングの補正の結果を7×41のORを行う。
6.)白収縮
白膨張の結果の1×33のANDを行う。白膨張と白収縮を行うことにより、白画素パターンマッチングの補正結果に対して膨張と小面積で存在する非アクティブ画素を除去する。この判定結果は、白地と境界部分に対して、非白地側の境界領域を含む結果となる。言いかえれば、白地よりも大きな領域となる。
白ブロック補正では、ブロックパターンBCPの×を付した注目画素を中心とした15×11画素において、四隅の各6×4画素領域それぞれに1つ以上の白候補ブロックが存在するときに、注目ブロックに白ブロック補正データを与える。このことにより、白地に囲まれた領域を白領域とする。
図25に示すように、本実施例ではグレーパターンマッチングの結果に対して、11×11のOR処理をする。このことにより、グレー領域に対してやや大きな領域となる。
白補正の結果がアクティブまたは、収縮結果がアクティブでかつグレー膨張結果が非アクティブの時に白背景とする。式で表現すると次式のようになる。
白補正の結果 # (白収縮の結果 & !グレー膨張の結果)
ここで、白補正の結果では、白地にかっ込まれた領域を確実に白領域と判定して、白収縮の結果 & !グレー膨張の結果の結果では、濃い黒文字周辺を白領域として、濃度の薄いところを非白領域としている。
上述のように白領域抽出323では、白判定323cで、RGB白抽出323bの白地判定信号,色地判定信号dおよび谷白画素判定信号、ならびに、2値化323aの2値化白判定信号、に対応する、白の程度をあらわす状態変数である白地情報MSを生成する。そして白パターンマッチング323dで、該色地判定信号d,白地情報MS,2値化白判定信号および谷白画素判定信号に基づいて注目画素が白画素か否を仮に定めて、注目画素を含む画素マトリスクに対する白画素分布パターンマッチングによって白画素か否を確定する。この結果と、黒判定323eおよび黒パターンマッチング323fの結果を用いて、白補正323gが、注目画素が黒地と白地境界との境界(白領域:文字領域)であるかを判定する。
第1網点ピーク検出324aは、G画像データを用いて、所定の大きさの二次元局所領域内の画素濃度情報から、網点ドットの一部を形成する画素(網点ピーク画素と呼ぶ)を検出する回路である。局所領域に関して、次の二つの条件が同時に成立するときに、領域の中心画素を網点ピーク画素として検出する。
条件1:中心画素の濃度レベルが局所領域内で最大(山ピーク)または最小(谷ピーク)である;
条件2:中心画素に対し点対称関係にある全ての画素のペアについて、画素ペアの濃度レベルの平均と中心画素の濃度レベルとの差の絶対値が、閾値Th以上であること。
abs(2Lc−L1−L8)≧Lth
かつabs(2Lc−L2−L7)≧Lth
かつabs(2Lc−L3−L6)≧Lth
かつabs(2Lc−L4−L5)≧Lth
のときに、マスクの中心画素(Lc)を網点ピーク画素として検出する。abs関数は絶対値をとることを意味する。Lthは閾値(固定値)である。
abs(2Lc−L1−L8)≧Lth
かつabs(2Lc−L2−L7)≧Lth
かつabs(2Lc−L3−L6)≧Lth
かつabs(2Lc−L4−L5)≧Lth
のときに、マスクの中心画素(Lc)を網点ピーク画素として検出する。abs関数は絶対値をとることを意味する。Lthは閾値(固定値)である。
Lc=Min(d4,d3、d5、c4、e4)
このLcが周辺画素に対して最大値の時は、
パターンは、L1=Max(a1、a2、b1)
L2=Max(a3、a4、a5)
L3=Max(a6、a7、c7)
L4=Max(c1、d1、e1)
L5=Max(c7、d7、e7)
L6=Max(f1、g1、g2)
L7=Max(g3、g4、g5)
L8=Max(g6、g7、f7)
と定めたものである。ここで、L1=Max(a1、a2、b1)とは、画素a1、a2、b1の濃度の最大値を、上述の網点ピーク画素検出演算のL1の値とすることを意味する。Lc=Min(d4,d3、d5、c4、e4)とは、d4,d3、d5、c4、e4の濃度(画像データ)の最小値を意味する。
このLcが周辺画素に対して最小値の時は、
パターンは、L1=Min(a1、a2、b1)
L2=Min(a3、a4、a5)
L3=Max(a6、a7、c7)
L4=Max(c1、d1、e1)
L5=Max(c7、d7、e7)
L6=Max(f1、g1、g2)
L7=Max(g3、g4、g5)
L8=Max(g6、g7、f7)
と定めたものである。
網点抽出結果との処理の違いは、網点ピーク検出では、低線数の入力のみで網点抽出をしているので、低線数網点のみの抽出が可能となっている。
原稿中の色(有彩)画素や黒(無彩)画素を検出する際には、R,G,Bの相対的な読み取りずれが、各色画像データのサンプリングや機械的精度のために存在する。図15を用いて説明する。図15の(a)は、画像濃度信号で、黒濃度信号は理想的には、R,B,G濃度信号ともレベルの高低が一致したとき理想の黒である。ところが、実際の画像データは、レンズでCCD上に画像を結像し、CCDの画像信号をデジタル化したもので、図15の(b)が理想の高低波形となる。しかし、一般的なスキャナでは、3ラインCCDセンサを用いているため、画像データのR,G,Bの各画像を時間的に同時に読み取るのではなく、R,G,Bの各ラインセンサは等間隔で配置され、時間的に同時に読むことができないので、どうしても読み取り位置ずれが生じてしまう。例えば、図15の(b)に示すレベル変化の黒を表すR,G,B各色濃度信号は、図15の(c)に示すように、相対的にずれる。このずれが大きいと、黒領域の周縁に色ずれが現れる。
色判定325は、有彩色領域を見つけるものである。入力データR,G,Bは、色相分割325aにて、c,m,yおよび色判定用w(白)の信号に変換される。色相分割の例としては、それぞれの色の境界を求め、1画素内のR,G,Bそれぞれの画像データの最大値と最小値の差をRGB差と定義して、以下のようにした。ここでは、R,G,B画像データは、数字が大きくなると黒くなる(濃くなる)。
1).R−Y色相領域境界(ry)
R - 2 * G + B > 0
2).Y−G色相領域境界(yg)
11 * R - 8 * G - 3 * B > 0
3).G−C色相領域境界(gc)
1 * R - 5 * G + 4 * B < 0
4).C−B色相領域境界(cb)
8 * R - 14 * G + 6 * B < 0
5).B−M色相領域境界(bm)
9 * R - 2 * G - 7 * B < 0
6).M−R色相領域境界(mr)
R + 5 * G - 6 * B < 0。
(R < thwa) & (G < thwa) & (B < thwa)ならば、y=m=c=0とする。thwaは閾値である。
(ry == 1) & (yg == 0) & (RGB差 > thy)ならば、y=1、m=c=0とする。thyは閾値である。
(yg == 1) & (gc == 0) & (RGB差 > thg)ならば、c=y=1、m=0とする。thgは閾値である。
(gc == 1) & (cb == 0) & (RGB差 > thc)ならば、c=1、m=y=0とする。thcは閾値である。
(cb == 1) & (bm == 0) & (RGB差 > thb)ならば、m=c=1、y=0とする。thbは閾値である。
(bm == 1) & (mr == 0) & (RGB差 > thm)ならば、m=1、y=c=0とする。thmは閾値である。
(mr == 1) & (ry == 0) & (RGB差 > thr)ならば、y=m=1、c=0とする。thrは閾値である。
(R < thw) & (G < thw) & (B < thw)ならば、色画素用w画素とし、wとして出力する。thwは閾値である。ここで、7)〜14)の優先順位は、数の小さい方を優先する。上述の閾値thwa,thy,thm,thc,thr,thg,thbは、複写(処理)前に決まる閾値である。thwとthwaの関係は、thw>thaとなっている。出力信号は、c,m,yに各1ビットの3ビットデータと、さらに、色判定用色画素検出のwの1ビットである。ここで色相毎に閾値をかえているのは、色相領域毎に、有彩範囲が異なる時に色相領域に応じた閾値を決定する。この色相分割は、一例であって、どんな式を使用してもよい。
図6に、色画素判定325fの内容を示す。5ライン分の、c,m,y,wのデータは、パターンマッチング325f5〜325f7と、カウント325f1〜325fに入力する。ここでまず、B/C信号を求める流れの中のパターンマッチング325f6について説明する。
色画素用w画素が存在する時は、その画素のc=m=y=0に補正する。この補正により、注目画素を中心とする5×5画素マトリクスの白レベルが大きくなる。次に注目画素が、色相分割325aで判定した画素のc,m,yの全てが1(c=m=y=1)または全てが0(c=m=y=0)以外の画素(色画素)であるかを、該5×5画素マトリクスがつぎのパターンにマッチングするかをチェックすることによって判定する:
1).色画素パターン群
1―1).パターン1―1(pm1)
D23 & D33 & D43
1―2).パターン1―2(pm2)
D32 & D33 & D34
1―3).パターン1―3(pm3)
D22 & D33 & D44
1―4).パターン1―4(pm4)
D24 & D33 & D42
中心画素(注目画素)は、D33である。図16にこれらのパターンpm1〜pm4を示す。これらのパターン上の白丸は、c,m,yの少なくとも一者が1であることを示す。パターンマッチングを採用するのは、孤立点などを拾わないようにするためである。逆に、網点などの、小面積色検出する際には、中心画素が1(c=m=y=1)または全てが0(c=m=y=0)以外の画素(色画素)であるかで、判定すればよい。
白に囲まれた色線を検出する。これに用いるパターンを図17に示す。図17において、白丸を付した画素は、c,m,yが全て0の画素である。注目画素(中心画素)を中心とする5×5画素マトリクスのデータ(c,m,y)の分布が、図17のパターンpw11a〜pw14dのいずれかにマッチングすると、そのときの注目画素(中心画素)を色線画素と見なす:
2―1).パターン2―1(pw11a〜pw11d)
((D12&D13&D14)&(D42&D43&D44))#
((D12&D13&D14)&(D52&D53&D54))#
((D22&D23&D42)&(D42&D43&D44))#
((D22&D23&D42)&(D52&D53&D54))
2―2).パターン2―2(pw12a〜pw12d)
((D21&D31&D41)&(D24&D34&D44))#
((D21&D31&D41)&(D25&D35&D45))#
((D22&D23&D24)&(D24&D34&D44))#
((D22&D23&D24)&(D25&D35&D45))
2―3).パターン2―3(pw13a〜pw13d)
((D11&D21&D12)&(D35&D44&D53))#
((D11&D21&D12)&(D45&D44&D55))#
((D13&D22&D31)&(D35&D44&D53))#
((D13&D22&D31)&(D45&D44&D55))
2―4).パターン2―4(pw14a〜pw14d)
((D13&D24&D35)&(D41&D51&D52))#
((D14&D15&D25)&(D41&D51&D52))#
((D13&D24&D35)&(D31&D42&D53))#
((D14&D15&D25)&(D31&D42&D53))。
c,m,yが全て0のところのパターンマッチングを行う。これに用いるパターンを図18に示す。図18において、白丸を付した画素は、c,m,yが全て0の画素である。注目画素(中心画素)を中心とする5×5画素マトリクスのデータ(c,m,y)の分布が、図18のパターンpw21a〜pw24dのいずれかにマッチングすると、そのときの注目画素(中心画素)を白領域画素と見なす:
3―1).パターン3―1(pw21a〜pw21d)
(D21&D31&D41)#
(D22&D32&D42)#
(D24&D34&D44)#
(D25&D35&D45)
3―2).パターン3―2(pw22a〜pw22d)
(D12&D13&D14)#
(D22&D23&D24)#
(D42&D43&D44)#
(D52&D53&D54)
3―3).パターン3―3(pw23a〜pw23d)
(D52&D51&D41)#
(D53&D42&D31)#
(D35&D24&D13)#
(D25&D15&D14)
3―4).パターン3―4(pw24a〜pw24d)
(D54&D55&D45)#
(D53&D44&D35)#
(D31&D22&D13)#
(D21&D11&D12)。
上記で抽出したパターンマッチング結果が以下のパターンに一致すれば、注目画素を、色判定用色画素候補2とする:
((pm1 == 1) & ((pw11 == 1) # (pw21 != 1))) #
((pm2 == 1) & ((pw12 == 1) # (pw22 != 1))) #
((pm3 == 1) & ((pw13 == 1) # (pw23 != 1))) #
((pm4 == 1) & ((pw14 == 1) # (pw24 != 1)))
ここで、(pm1 == 1)は、注目画素を中心とするデータ分布が、パターンpm1にマッチングすることを意味し、(pw11 == 1)はパターンpw11a〜pw11dのいずれかにマッチングすることを意味し、(pw21 != 1)はパターンpw21a〜pw21dのいずれかにマッチングすることを意味する。&は論理積を、#は論理和を意味する。このパターンマッチングにより、白領域に囲まれた色画素を色画素候補として、それ以外で白領域が存在する時は、色画素としない。白領域がない色画素パターンマッチングで一致したものは、色画素候補となる。
注目画素を中心とする5×5画素マトリクス内に、色判定用w画素が存在する時は、その画素の色相分割325aで判定したc,m,yデータをc=m=y=0に補正する。この補正により、該画素マトリクスの白レベルが大きくなる。そして、該画素マトリクス内の各画素のc,m,yの1(c=1,m=1,y=1)の数をカウントする。c,m,yそれぞれについてのカウント値の最大値と最小値との差が、thcnt以上でかつ最小値がthmin未満ならば、色画素候補1とする。thcnt,thminは、複写(処理)前に設定する閾値である。y,m,cにプレーン展開して、N×Nのマトリクスにおいてのそれぞれのプレーン毎に数を数えて、最小値をブラックと仮定している。このことにより、黒画素の読み取りが漏れても補正が可能となる。そして最大値と最小値の差で有彩画素を判定している。このことにより、黒画素が読み取りから外れた画素を補正して、有彩画素を抽出する。注目画素を中心とする5×5画素マトリクス内に一定画素の有彩画素があると注目画素を有彩画素としている。
パターンマッチング325f6とカウント325f1の出力にもとづいて、色画素判定325f8で、色画素か否かを判定する。色画素候補1でかつ色画素候補2であれば、色画素1とする。
色画素判定325f8の出力をブロック化325f9にてブロック化をする。ブロック化とは、4×4画素のマトリックスにおいて、1画素以上の色画素1があれば、該4×4画素マトリックス全体を色画素1ブロックとして、出力する。ブロック化325f9以降の処理は、4×4画素を1ブロックとしてブロック単位出力する。
ブロック化したデータを孤立点除去325f10にて、注目ブロックの隣り合うブロックに色画素1ブロックがなければ孤立点として、除去する。
孤立点除去325f10の出力を、膨張325f11にて、色画素1ブロックが存在する場合は、5×5ブロックに膨張する。膨張するのは、色画素の周辺を、黒文字処理をしないようにするためである。ここで、出力するB/C信号は、色画素1ブロックの時にL(有彩)を出力し、それ以外の時は、H(無彩)を出力する。
注目画素を中心とする5×5画素マトリクス内に色判定用w画素が存在する時は、その画素の色相分割325aで判定したc,m,yデータをc=m=y=0に補正する。この補正により、該画素マトリクスの白レベルが大きくなる。そして、該画素マトリクス内の各画素の、c,m,yの1(c=1,m=1,y=1)の数をカウントする。c,m,yそれぞれについてのカウント値の最大値と最小値との差が、thacnt以上でかつ最小値がthamin未満ならば、注目画素を色画素候補1とする。thacnt,thaminは、複写(処理)前に設定する閾値である。
パターンマッチング325f6とカウント325f2の出力にもとづいて、色画素判定325f12で、色画素か否かを判定する。色画素候補1でかつ色画素候補2であれば、色画素2とする。
色画素判定325f12の出力をブロック化325f13にてブロック化をする。即ち、4×4画素のマトリックスにおいて、1画素以上の色画素2があれば、該4×4画素マトリックの全体を色画素2ブロックとして、出力する。ブロック化325f13以降の処理は、4×4画素を1ブロックとしてブロック単位出力する。
孤立ブロックの除去のために、3×3ブロックの中のアクティブ条件(色画素2ブロック)が3個以上あり、注目ブロックがアクティブ(色画素)ならば、注目ブロックをアクティブブロック(色画素2ブロック)とする。
注目画素を中心とする5×5画素マトリクス内の各画素の、c,m,yの1(c=1,m=1,y=1)の数をカウントする。c,m,yそれぞれについてのカウント値の最大値と最小値との差が、tha1cnt以上で、かつカウントしたc,m,yの最小値が、tha1min未満ならば、色画素候補3とする。tha1cnt,tha1minは、複写(処理)前に設定する閾値である。
色画素検出で判定した画素(c、m、y)が色画素かを、5×5画素マトリクスを用いるパターンマッチングで判定する。パターンはパターンマッチング325f6のものと同じである。パターンマッチングで一致した画素は、色画素候補4とする。
色画素候補3でかつ色画素候補4であれば、色画素3とする。
色画素判定325f15の出力をブロック化325f16にてブロック化をする。すなわち、4×4画素のマトリックスにおいて、1画素以上の色画素3があれば、該4×4画素マトリックスの全体を色画素3ブロックとして、出力する。ブロック化325f16以降の処理は、4×4を1ブロックとしてブロック単位出力する。
孤立ブロックの除去のために、3×3ブロックの中のアクティブ条件(色画素3ブロック)が3個以上あり、注目ブロックがアクティブ(色画素3)ならば、注目ブロックをアクティブブロック(色画素3ブロック)とする。
注目画素を中心とする5×5画素マトリクス内の各画素の、色相分割325aで判定したc,m,yの1(c=1,m=1,y=1)の数をカウントする。c,m,yの各カウント値の最小値が、thabk以上ならば、注目画素を黒画素候補1とする。thabkは、複写(処理)前に設定する閾値である。
注目画素を中心とする5×5画素マトリクスにおいて、c=m=y=1の画素のパターンマッチングを行う。
D23&D33&D43
1―2).パターン1―2(pm2)
D32&D33&d34
1―3).パターン1―3(pm3)
D22&D33&D44
1―4).パターン1―4(pm4)
D42&D33& D24
これらのパターンは図16に示すものであり、図中に丸印を付した画素が、c=m=y=1の画素である。これらのパターンのどれかに一致した時に、注目画素を黒画素候補2とする。
注目画素が、黒画素候補1でかつ黒画素候補2であれば、黒画素とする。
黒画素の出力をブロック化325f19にてブロック化をする。ここでのブロック化とは、4×4画素のマトリックスにおいて、1画素以上の黒画素があれば、該4×4画素マトリックスの全体を黒画素ブロックとして、出力する。ブロック化325f19以降の処理は、4×4画素を1ブロックとしてブロック単位出力する。
3×3ブロックのマトリックス内において、注目ブロックがアクティブ(黒画素ブロック)で、その周辺画素がノンアクティブ(非黒画素)ならば、注目ブロックをノンアクティブ(非黒画素ブロック)にする。
注目ブロックが、色画素判定325f12でアクティブ(色画素2)と判定されかつ無彩判定325f18でアクティブ(黒画素)と判定されていなければ、注目ブロックは色(色ブロック)と判定する。また、色画素判定325f15がアクティブ(色画素)の時も色と判定する。
総合色画素判定325f21で、色と判定したブロックに対して小さな文字を連続と見なすために、注目ブロックを中心とする9×9ブロックのマトリックス内に1ブロックでもアクティブブロックがあれば、注目ブロックをアクティブブロックとする。ここで、大きく膨張させるのは、文字同士のすき間を埋めるためである。
連続カウント325f23では、色画素ブロックの連続性を見て、カラー原稿か白黒原稿かを判定する。膨張325f22の出力データ(色画素ブロック)の中の色画素の連続数をカウントすることにより、カラー原稿かどうか判定する。
総合判定326は、文字判定326a,膨張処理326b,文字なか判定326cおよびデコード326dからなる。なお、上述のエッジ抽出結果、白領域抽出結果、網点抽出結果、低線数網点抽出結果、色判定結果についての総合判定は図27に示す通りである。
文字判定326aでは、エッジ抽出322の結果がエッジありで、網点抽出324の結果が網点なしで白領域抽出323の結果が白領域ありのときは、文字エッジと判定する。そうでないときには非文字エッジ(絵柄又は文字なか)と判定する。
膨張処理326bでは、文字判定326bの結果を8×8ブロックのOR処理をして、その後に3×3ブロックのAND処理をして4ブロックの膨張処理を行う。すなわち、注目ブロックを中心とする8×8ブロックのいずれかのブロックが文字エッジであると、注目ブロックも文字エッジブロックであると仮定し、該注目ブロックを中心とする3×3ブロックのすべてが文字エッジであると注目ブロックを文字エッジと確定し、そして、注目ブロックとそれに隣接する3ブロック、計4ブロックを文字エッジと見なす。OR処理してからAND処理するのは、特に黒文字の場合、黒文字の領域の周辺に小領域の非黒文字領域が存在すると、処理の差により違和が感じられることがある。例えば黒が薄く見える。これを防ぐために、OR処理で非黒文字領域を大きくしている。AND処理は、望むべき膨張量にするために行っている。
デコード326dが最終的に出力するC/P信号は、以下の表のようになる。
本発明は、前述する実施形態を実現するソフトウェアを記憶した記憶媒体をシステムあるいはコンピュータが記憶媒体に記憶されたソフトウェアを実行しても構わない。
11 ICカード
12 スキャナコントローラ
13 エンジンコントローラ
14 ソータコントローラ
15 エディタ
16 プリンタコントローラ
17 FAXコントローラ
18 パラレルI/Fコントロール
19 LANコントローラ
20 通信コントロール
180 原稿
200 カラー画像読み取り装置(スキャナ)
202 コンタクトガラス
204A ミラー群
204B ミラー群
204C ミラー群
205 照明ランプ
206 レンズ
207 カラーセンサ
300 画像処理ユニット(IPU)
310 RGBγ補正
320 原稿認識
321 フィルタ
322 エッジ抽出
322a 3値化
322b 黒画素連続検出
322c 白画素連続検出
322d 近傍画素連続検出
322e 孤立点除去
323 白領域抽出
323a 2値化
323b RGB白地検出
323c 白判定
323d 白パターンマッチング
323f グレーパターンマッチング
324 網点抽出
324a 第1網点ピーク検出部
324b 第2網点ピーク検出部
324c 第3網点ピーク検出部
324e 網点領域検出部
324f 一時記憶手段
324g 周期チェック
324h 周期チェック
324i OR
324j 一時記憶手段
325 色判定
325a 色相分割
325b ラインメモリ
325c ラインメモリ
325d ラインメモリ
325e ラインメモリ
325f 色画素判定
326 総合判定
326a 文字判定
326b 膨張処理
326c 文字なか判定
326d デコード
330 RGBフィルタ
340 色補正
350 変倍
351 インターフェース
352 インターフェース
353 インターフェース
354 インターフェース
355 BRユニット
356 RAM
357 中央処理装置(CPU)
358 ROM
359 ビデオコントロール
360 UCR
370 CMYBkフィルタ
380 CMYBkγ補正
390 階調処理
400 カラー記録画像装置(カラープリンタ)
401 光学ユニット
412B2 給紙トレイ
414 感光体ドラム
414D 電位センサ
414M 除電ランプ
414P 現像濃度パターン検知器
415 中間転写ベルト
415C クリーニング対向ローラ
415D 駆動ローラ
415F 転写対向ローラ
415T 転写対向ローラ
415U ベルトクリーニング装置
416 ベルト転写コロナ放電器(ベルト転写部)
417 紙転写コロナ放電器(紙転写機)
418R レジストローラ対
419 帯電器
420 リボルバ現像装置
420K Bk現像器
420C C現像器
420M M現像器
420Y Y現像器
420KS 現像スリーブ
420CS 現像スリーブ
420MS 現像スリーブ
420YS 現像スリーブ
421 感光体クリーニングユニット
422 紙搬送ベルト
423 定着器
423A 定着ローラ
423B 加圧ローラ
424 排出ロール対
441 レーザ発光器
442 fθレンズ
443 ポリゴンミラー
444 回転用モータ
446 反射ミラー
482 転写紙カセット
483 給紙コロ
Claims (15)
- 画像データのRGB入力手段と、
R,G,Bの1色を基準として同一画素位置の基準色と基準色以外の色の濃度差を検出する濃度差検出手段と、
前記濃度検出手段を周辺画素に対して行う周辺画素濃度検出手段と、
基準画素と以外の2つ色に対して仮想的に位置をずらした画素を2つ以上算出する仮想画素算出手段と、
前記仮想画素算出手段により、求めたデータすべてに対して、注目画素の基準色との濃度差を演算する注目画素濃度差検出手段と、
前記注目画素濃度検出の結果と、前記周辺画素濃度検出手段の算出結果に基づいて前記仮想画素検出手段の結果のデータで画像データを補正する画像補正手段と、
を備えることを特徴とする画像処理装置。 - 前記画像補正手段は、注目画素と仮想演算手段の結果の間に、目標濃度差があるときに、目標濃度差に補正することを特徴とする請求項1記載の画像処理装置。
- 前記補正手段は、周辺画素のデータの差が多い所に対して補正を行うことを特徴とする請求項1記載の画像処理装置。
- 前記補正方向は、主走査方向又は副走査方向であることを特徴とする請求項1記載の画像処理装置。
- 補正後の画像データを用いて、色文字エッヂ及び黒文字エッヂの色を判定すること特徴とする請求項1記載の画像処理装置。
- 請求項1〜5のいずれか1項に記載の画像処理装置と、
原稿画像を色分解して読み取って画像データを生成して該画像処理装置に与えるカラースキャナと、
を備える画像読取装置。 - 請求項1〜5のいずれか1項に記載の画像処理装置と、
出力画像データを用紙上にプリントアウトするカラープリンタを備える画像形成装置。 - 請求項1〜5のいずれか1項に記載の画像処理装置と、
原稿画像を色分解して読み取って画像データを生成して該画像処理装置に与えるカラースキャナと、
該画像処理装置の出力画像データを用紙上にプリントアウトするカラープリンタを備えるカラー複写装置。 - 外部からのプリント指示コマンドを解析して前記プリンタにて外部からの画像情報をプリントアウトするプリンタコントローラを更に備える請求項8のカラー複写装置。
- 画像データのRGB入力処理と、
R,G,Bの1色を基準として同一画素位置の基準色と基準色以外の色の濃度差を検出する濃度差検出処理と、
前記濃度検出処理を周辺画素に対して行う周辺画素濃度検出処理と、
基準画素と以外の2つ色に対して仮想的に位置をずらした画素を2つ以上算出する仮想画素算出処理と、
仮想画素算出処理により、求めたデータすべてに対して、注目画素の基準色との濃度差を演算する注目画素濃度差検出処理と、
上記注目画素濃度検出の結果と、周辺画素濃度検出処理の算出結果に基づいて仮想画素検出処理の結果のデータで画像データを補正する画像補正処理と、
をコンピュータに実行させるための画像処理プログラム。 - 前記画像補正処理は、注目画素と仮想演算処理の結果の間に、目標濃度差があるときに、目標濃度差に補正することをコンピュータに実行させる請求項10記載の画像処理プログラム。
- 前記補正処理は、周辺画素のデータの差が多い所の対して補正を行うことをコンピュータに実行させる請求項10記載の画像処理プログラム。
- 前記補正方向は、主走査方向又は副走査方向であること特徴とする請求項10記載の画像処理プログラム。
- 補正後の画像データを用いて、色文字エッヂ及び黒文字エッヂの色を判定することをコンピュータに実行させる請求項10記載の画像処理プログラム。
- 請求項10〜14のいずれか1項に記載の画像処理プログラムを記録した記録媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004190446A JP2006014094A (ja) | 2004-06-28 | 2004-06-28 | 画像処理装置、画像読取装置、画像形成装置、カラー複写装置、画像処理プログラム及び記録媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004190446A JP2006014094A (ja) | 2004-06-28 | 2004-06-28 | 画像処理装置、画像読取装置、画像形成装置、カラー複写装置、画像処理プログラム及び記録媒体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006014094A true JP2006014094A (ja) | 2006-01-12 |
Family
ID=35780751
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004190446A Pending JP2006014094A (ja) | 2004-06-28 | 2004-06-28 | 画像処理装置、画像読取装置、画像形成装置、カラー複写装置、画像処理プログラム及び記録媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006014094A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009111645A (ja) * | 2007-10-29 | 2009-05-21 | Ricoh Co Ltd | 色画素判定装置、画像処理装置、画像形成装置、色画素判定方法及び色画素判定プログラム |
| JP2010086430A (ja) * | 2008-10-01 | 2010-04-15 | Dainippon Printing Co Ltd | 目標物検出システム |
| JP2012181838A (ja) * | 2011-03-01 | 2012-09-20 | Sharp Corp | 画像処理装置、画像処理方法、プログラムおよび記録媒体 |
| CN116012368A (zh) * | 2023-02-16 | 2023-04-25 | 江西惜能照明有限公司 | 基于智慧灯杆的安防监测方法、系统、存储介质及计算机 |
-
2004
- 2004-06-28 JP JP2004190446A patent/JP2006014094A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009111645A (ja) * | 2007-10-29 | 2009-05-21 | Ricoh Co Ltd | 色画素判定装置、画像処理装置、画像形成装置、色画素判定方法及び色画素判定プログラム |
| JP2010086430A (ja) * | 2008-10-01 | 2010-04-15 | Dainippon Printing Co Ltd | 目標物検出システム |
| JP2012181838A (ja) * | 2011-03-01 | 2012-09-20 | Sharp Corp | 画像処理装置、画像処理方法、プログラムおよび記録媒体 |
| US8571343B2 (en) | 2011-03-01 | 2013-10-29 | Sharp Laboratories Of America, Inc. | Methods and systems for document-image correction |
| CN116012368A (zh) * | 2023-02-16 | 2023-04-25 | 江西惜能照明有限公司 | 基于智慧灯杆的安防监测方法、系统、存储介质及计算机 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3983101B2 (ja) | 画像処理装置、画像読み取り装置、画像形成装置およびカラー複写装置 | |
| JP2002354242A (ja) | 画像処理装置、画像読み取り装置、画像形成装置およびカラー複写装置 | |
| US20020031263A1 (en) | Method and system for processing character edge area data | |
| US7880927B2 (en) | Image forming apparatus, image forming method, program, and recording medium | |
| JP4010434B2 (ja) | 画像処理,形成およびカラー複写、の各装置 | |
| JP2007215204A (ja) | 画像処理装置 | |
| JP4063480B2 (ja) | 画像処理装置 | |
| JP4380696B2 (ja) | 画像処理装置 | |
| JP2006014094A (ja) | 画像処理装置、画像読取装置、画像形成装置、カラー複写装置、画像処理プログラム及び記録媒体 | |
| JP4833893B2 (ja) | 画像処理装置、画像処理方法、画像読み取り装置、画像形成装置、複写装置、プログラムおよびコンピュータ読み取り可能な記録媒体 | |
| JP2004153563A (ja) | 画像処理装置、画像読取り装置、画像形成装置およびカラー複写装置 | |
| JP2005051353A (ja) | 画像処理装置、画像読み取り装置、画像形成装置、コンピュータプログラム及び記録媒体 | |
| JP2004104625A (ja) | 画像処理、読取、形成装置およびカラー複写装置 | |
| JP2003259115A (ja) | 画像処理装置、画像読取装置、画像形成装置およびカラー複写装置 | |
| JP2006005680A (ja) | 画像処理装置、画像読取装置、画像形成装置、及びカラー複写装置 | |
| JP3982669B2 (ja) | 画像処理装置 | |
| JP4695472B2 (ja) | 画像処理装置、画像形成装置、画像処理方法、プログラム及び記憶媒体 | |
| JP2009111645A (ja) | 色画素判定装置、画像処理装置、画像形成装置、色画素判定方法及び色画素判定プログラム | |
| JP4379873B2 (ja) | 画像処理装置、記憶媒体、画像読取装置、画像形成装置 | |
| JP2007006526A (ja) | 画像処理装置、低線数網点部検出装置、画像読み取り装置、画像形成装置およびカラー複写装置 | |
| JP2004112725A (ja) | 画像処理装置、画像読取装置、画像形成装置及び複写装置 | |
| JP4133674B2 (ja) | 画像処理装置、画像読取装置及びカラー複写装置 | |
| JP2002262077A (ja) | 画像処理装置及び画像形成装置 | |
| JP4320309B2 (ja) | 画像処理装置、画像処理方法、画像処理プログラム、および該プログラムを記録した記録媒体 | |
| JP2004112355A (ja) | 画像処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080908 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080916 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081104 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090512 |