JP2006044293A - 車輌の運動制御装置 - Google Patents
車輌の運動制御装置 Download PDFInfo
- Publication number
- JP2006044293A JP2006044293A JP2004223979A JP2004223979A JP2006044293A JP 2006044293 A JP2006044293 A JP 2006044293A JP 2004223979 A JP2004223979 A JP 2004223979A JP 2004223979 A JP2004223979 A JP 2004223979A JP 2006044293 A JP2006044293 A JP 2006044293A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- braking
- driving force
- target
- wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
Abstract
【解決手段】左右前輪の実舵角δが演算され(S20)、車輌の実ロール角を操舵輪の舵角に基づく車輌の目標ロール角に追従させるために車輌に付与すべき左右輪の制駆動力差による目標ヨーモーメントMtが演算され(S30)、アクセル開度φ及びマスタシリンダ圧力Pmに基づき運転者による車輌全体の要求制駆動力Fが演算され(S40)、目標ヨーモーメントMt及び要求制駆動力Fに基づき各車輪の目標制駆動力Xiが演算され(S50)、各車輪の制駆動力が目標制駆動力Xiになるよう電動発電機12FL〜12RR若しくは摩擦制動装置16が制御される(S60)。
【選択図】 図2
Description
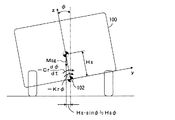
図3に示されている如く、車輌100のロール剛性をKrとし、車輌のばね上質量をMsとし、車輌のロール軸102と重心との間の距離をHsとし、車輌のロール角をφとし、図3には示されていないショックアブソーバによるばね上の単位ロール角速度当りのロールモーメントをCrとし、重力加速度をgとすると、車輌100がそのロール軸102の周りにロールする場合のロールモーメントの和ΣMxは下記の式1により表される。

Xtfl+Xtfr+Xtrl+Xtrr=F ……(15)
Df(Xtfr−Xtfl)+Dr(Xtrr−Xtrl)=2Mt ……(16)
(1−j)(Xtfl+Xtfr)−j(Xtrl+Xtrr)=0 ……(17)
Df(1−k)(Xtfr−Xtfl)−Dr・k(Xtrr−Xtrl)=0 ……(18)
A・X=LUX=B ……(26)
LC=B ……(27)
C1=2M−DfC0
=2M−DfF ……(30)
C2=−(1−j)C0
=−(1−j)F ……(31)
C3=−Df(1−k)C0−(1−k)C1−DrC2
=−Df(1−k)F−(1−k)(2M−DfF)+Dr(1−j)F
=−2M(1−k)+Dr(1−j)F ……(32)
上記式UX=Cは下記の式33となる。
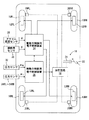
14 駆動力制御用電子制御装置
16 摩擦制動装置
22 ブレーキペダル
26 制動力制御用電子制御装置
28 アクセル開度センサ
30 操舵角センサ
32、34FL〜34RR 圧力センサ
Claims (4)
- 左右輪間に制駆動力差を付与可能な車輌の運動制御装置にして、車輌の実ロール角を操舵輪の舵角に基づく車輌の目標ロール角に追従させるために車輌に付与すべき目標ヨーモーメントを演算し、車輌に付与されるヨーモーメントが前記目標ヨーモーメントになるよう左右輪間の制駆動力差を制御することを特徴とする車輌の運動制御装置。
- 操舵輪の舵角に基づく車輌の目標横加速度に対応する車輌のロール角として車輌の目標ロール角を演算することを特徴とする請求項1に記載の車輌の運動制御装置。
- 操舵輪の操舵に対する車輌の横加速度発生の遅れを考慮して車輌の目標横加速度に対応する車輌の目標ロール角を演算することを特徴とする請求項2に記載の車輌の運動制御装置。
- 左右輪間に制駆動力差を付与することに対する車輌の横加速度発生の遅れを考慮して左右輪間の制駆動力差を制御することを特徴とする請求項1乃至3に記載の車輌の運動制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004223979A JP2006044293A (ja) | 2004-07-30 | 2004-07-30 | 車輌の運動制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004223979A JP2006044293A (ja) | 2004-07-30 | 2004-07-30 | 車輌の運動制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006044293A true JP2006044293A (ja) | 2006-02-16 |
Family
ID=36023371
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004223979A Pending JP2006044293A (ja) | 2004-07-30 | 2004-07-30 | 車輌の運動制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006044293A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016133182A1 (ja) * | 2015-02-19 | 2016-08-25 | 本田技研工業株式会社 | 車両 |
| US9694819B2 (en) | 2015-02-19 | 2017-07-04 | Honda Motor Co., Ltd. | Vehicle |
| US9725014B2 (en) | 2013-07-31 | 2017-08-08 | Honda Motor Co., Ltd. | Vehicle |
-
2004
- 2004-07-30 JP JP2004223979A patent/JP2006044293A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9725014B2 (en) | 2013-07-31 | 2017-08-08 | Honda Motor Co., Ltd. | Vehicle |
| WO2016133182A1 (ja) * | 2015-02-19 | 2016-08-25 | 本田技研工業株式会社 | 車両 |
| US9694819B2 (en) | 2015-02-19 | 2017-07-04 | Honda Motor Co., Ltd. | Vehicle |
| US10220836B2 (en) | 2015-02-19 | 2019-03-05 | Honda Motor Co., Ltd. | Vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4285343B2 (ja) | 車輌のロール剛性制御装置 | |
| EP1510438B1 (en) | Control device for vehicle power steering | |
| JP4186081B2 (ja) | 車輌の制駆動力制御装置 | |
| JP4131270B2 (ja) | 車輌の制駆動力制御装置 | |
| US12128727B2 (en) | Method to control the active shock absorbers of a road vehicle featuring the adjustment of the roll angle and of the pitch angle | |
| JP2006335171A (ja) | 車輌の制駆動力制御装置 | |
| JP4131269B2 (ja) | 車輌の制駆動力制御装置 | |
| JP2002114140A (ja) | 車輌のロール挙動制御装置 | |
| JP4131268B2 (ja) | 車輌の制駆動力制御装置 | |
| EP1876077A1 (en) | Braking-driving force control device of vehicle | |
| JP4849238B2 (ja) | 車両の走行制御装置 | |
| JPS63101158A (ja) | アンチスキツド制御装置 | |
| JP2006264628A (ja) | 車輌の制駆動力制御装置 | |
| JP2006044293A (ja) | 車輌の運動制御装置 | |
| JP4155246B2 (ja) | 車輌の運動制御装置 | |
| JP2007076578A (ja) | 車輌の操舵補助力制御装置 | |
| JP4765552B2 (ja) | 電動車輌の駆動力制御装置 | |
| JP7722859B2 (ja) | 電動式全輪駆動車 | |
| JP4797586B2 (ja) | 車輌の制駆動力制御装置 | |
| JP2004203084A (ja) | 車両の運動制御装置 | |
| JP2588546B2 (ja) | 車両の運動特性制御方法 | |
| JP4353011B2 (ja) | 車輌の操舵制御装置 | |
| JP2006264433A (ja) | 車輌の前後加速度推定制御装置 | |
| JP2012121448A (ja) | 車両運動制御システム | |
| JP2020118057A (ja) | 駆動力制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20051226 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20051227 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060807 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071226 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080220 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080415 |