JP2006116151A - 内視鏡装置 - Google Patents
内視鏡装置 Download PDFInfo
- Publication number
- JP2006116151A JP2006116151A JP2004308648A JP2004308648A JP2006116151A JP 2006116151 A JP2006116151 A JP 2006116151A JP 2004308648 A JP2004308648 A JP 2004308648A JP 2004308648 A JP2004308648 A JP 2004308648A JP 2006116151 A JP2006116151 A JP 2006116151A
- Authority
- JP
- Japan
- Prior art keywords
- pulley
- unit
- endoscope
- insertion portion
- electric bending
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000003780 insertion Methods 0.000 claims abstract description 106
- 230000037431 insertion Effects 0.000 claims abstract description 106
- 238000004804 winding Methods 0.000 claims abstract description 18
- 238000005452 bending Methods 0.000 claims description 235
- 230000002093 peripheral effect Effects 0.000 claims description 27
- 230000005540 biological transmission Effects 0.000 abstract description 3
- 238000005299 abrasion Methods 0.000 abstract 1
- 230000003287 optical effect Effects 0.000 description 25
- 238000005192 partition Methods 0.000 description 14
- 238000005286 illumination Methods 0.000 description 13
- 238000010586 diagram Methods 0.000 description 7
- 230000000694 effects Effects 0.000 description 5
- 230000002265 prevention Effects 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 238000003384 imaging method Methods 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 3
- 230000001105 regulatory effect Effects 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- 230000037237 body shape Effects 0.000 description 2
- 230000001276 controlling effect Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000007665 sagging Methods 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
Images
































Landscapes
- Endoscopes (AREA)
Abstract
【課題】湾曲操作ワイヤの方向を変換することなく、挿入部基端部からスプロケットまでの湾曲操作ワイヤの伝達ロスを少なくでき、湾曲操作ワイヤの摩耗耐性を確保する。
【解決手段】 本発明の内視鏡装置1は、可撓性を有し、細長な挿入部21を備えた内視鏡2と、前記内視鏡2の先端部分に設けられる湾曲操作される湾曲部23と、外周面に前記挿入部21を巻回収納する環状のドラム部3と、前記ドラム部3内に設けられ、前記挿入部21の基端部と前記湾曲部23から延出される湾曲操作ワイヤ141、142を巻回するプーリーユニット153、154とを有し、前記挿入部21の基端部から、前記挿入部21の中心軸に対し所定の角度(θ)を成す直線と、前記ドラム部3の前記外周面からなる略扇状の範囲内に、前記プーリーユニット153、154を配設している。
【選択図】図1
【解決手段】 本発明の内視鏡装置1は、可撓性を有し、細長な挿入部21を備えた内視鏡2と、前記内視鏡2の先端部分に設けられる湾曲操作される湾曲部23と、外周面に前記挿入部21を巻回収納する環状のドラム部3と、前記ドラム部3内に設けられ、前記挿入部21の基端部と前記湾曲部23から延出される湾曲操作ワイヤ141、142を巻回するプーリーユニット153、154とを有し、前記挿入部21の基端部から、前記挿入部21の中心軸に対し所定の角度(θ)を成す直線と、前記ドラム部3の前記外周面からなる略扇状の範囲内に、前記プーリーユニット153、154を配設している。
【選択図】図1
Description
本発明は、細長な内視鏡の挿入部の先端部分に湾曲部を有する内視鏡装置に関する。
近年、内視鏡は、医療分野及び工業用分野において広く利用されている。医療分野において用いられる内視鏡は、細長い挿入部を体腔内に挿入することによって、体腔内の臓器を観察したり、必要に応じて処置具の挿通チャンネル内に挿入した処置具を用いて各種処置をしたりすることができる。
また、工業用分野において用いられる内視鏡は、細長い挿入部をボイラー,ガスタービンエンジン,または化学プラント等の配管,自動車エンジンのボディ等に挿入することによって、被検部位の傷及び腐蝕等の観察、並びに検査等を行うことができる。
このような内視鏡の挿入部の先端には、湾曲部及び先端部が設けられている。使用者は、内視鏡内に挿通された湾曲部から延出する操作ワイヤ等の牽引部材を、内視鏡の操作部の所定操作により牽引弛緩させることにより、湾曲部を湾曲させ、先端部内に配設された観察光学系の対物レンズの観察方向を変更させることができる。
この種の従来の内視鏡としては、例えば特開2001−228410号公報に示されているように、内視鏡挿入部の収納性を向上させるために、前記挿入部を巻き取るドラム部を有し、そのドラム部の中に、湾曲のための駆動源を有する電動湾曲駆動部を配置した内視鏡がある。
特開2001−228410号公報
しかしながら、前記特開2001−228410号公報に記載の従来技術では、挿入部の基端部よりも遠く離れた位置に、前記電動湾曲駆動部としてのスプロケット33やモータユニット31を配置しているため、湾曲操作ワイヤ34を一度、前記ドラム4内に設けられた方向変換部51のローラ部54(明細書中図5及び図7(a)参照)を介して方向変換しなくてはならず、前記湾曲操作ワイヤ34に曲げ負荷が集中的に加わる恐れがあるため、前記ローラ部54での前記湾曲操作ワイヤ34の磨耗耐性を確保することが必要であった。
そこで、本発明は前記事情に鑑みてなされたもので、湾曲操作ワイヤの方向を変換することなく、挿入部基端部からスプロケットまでの湾曲操作ワイヤの伝達ロスを少なくでき、湾曲操作ワイヤの摩耗耐性を確保することのできる内視鏡装置を提供することを目的とする。
本発明の内視鏡装置は、可撓性を有し、細長な挿入部を備えた内視鏡と、前記内視鏡の先端部分に設けられる湾曲操作される湾曲部と、外周面に前記挿入部を巻回収納する環状のドラム部と、前記ドラム部内に設けられ、前記挿入部の基端部と前記湾曲部から延出される湾曲操作ワイヤを巻回する回転体とを有する内視鏡装置において、前記挿入部の基端部から、前記挿入部の中心軸に対し所定の角度を成す直線と、前記ドラム部の前記外周面からなる略扇状の範囲内に、前記回転体を配設したことを特徴とするものである。
本発明の内視鏡装置によれば、湾曲操作ワイヤの方向を変換することなく、挿入部基端部からスプロケットまでの湾曲操作ワイヤの伝達ロスを少なくでき、湾曲操作ワイヤの摩耗耐性を確保することのできる内視鏡装置を提供することができるといった利点がある。
以下、図面を参照して本発明の実施例を説明する。
(構成)
図1は本発明の第1実施例を示す内視鏡装置の全体構成を示す斜視図である。
図1に示すように、内視鏡装置1は、例えば工業用の内視鏡(以下、内視鏡と称す)2と、収納ケース8とにより、主要部が構成されている。
図1は本発明の第1実施例を示す内視鏡装置の全体構成を示す斜視図である。
図1に示すように、内視鏡装置1は、例えば工業用の内視鏡(以下、内視鏡と称す)2と、収納ケース8とにより、主要部が構成されている。
収納ケース8は、箱体81と、この箱体81の上部に開閉自在に接続された蓋体82とにより構成され、未使用の際には前記内視鏡2等が収納される。
収納ケース8の箱体81は、内部に収納した内視鏡2に外部から加わる衝撃力を吸収する緩衝材等を備えている。また、箱体81の内部には、内視鏡2の収納の際には、内視鏡2の後述する挿入部21を外周面部31に巻き取る収納部であるドラム部3、光源部32、カメラコントロールユニット(以下、CCUと称す)33、電動湾曲駆動部34、電動湾曲回路部35等を収納したフレーム部4が配設されている。
収納ケース8の箱体81は、内部に収納した内視鏡2に外部から加わる衝撃力を吸収する緩衝材等を備えている。また、箱体81の内部には、内視鏡2の収納の際には、内視鏡2の後述する挿入部21を外周面部31に巻き取る収納部であるドラム部3、光源部32、カメラコントロールユニット(以下、CCUと称す)33、電動湾曲駆動部34、電動湾曲回路部35等を収納したフレーム部4が配設されている。
なお、フレーム部4は、後述するがドラム部3を回動自在に支持している。また、ドラム部3は、後述する上面板203、下面板204及び外周面部31(図8乃至図10参照)を有する管状部材201(図5乃至7参照)により構成されたフランジ形状を有している。
箱体81の上部には、各種スイッチ類、コネクタ類及び給排気用ダクトが配設されたフロントパネル5が形成されている。
具体的には、フロントパネル5の上面には、フレーム部4の内部に収納された各種部材及び内視鏡2に電源を供給するためのACケーブル51の一端が接続されている。
また、フロントパネル5の上面には、内視鏡2によって撮像された被検部位の画像を表示するモニタ7を回動自在に支持する伸縮式のポール71が接続されている。
具体的には、フロントパネル5の上面には、フレーム部4の内部に収納された各種部材及び内視鏡2に電源を供給するためのACケーブル51の一端が接続されている。
また、フロントパネル5の上面には、内視鏡2によって撮像された被検部位の画像を表示するモニタ7を回動自在に支持する伸縮式のポール71が接続されている。
さらに、フロントパネル5の上面には、リモートコントローラ(以下、リモコンと称す)6のケーブル61が着脱自在に接続されている。
リモコン6には、ジョイスティック62が設けられている。このジョイスティック62は、内視鏡2の後述する挿入部21の湾曲部23を湾曲操作する際の湾曲入力制御部となる。また、リモコン6には、フレーム部4の内部に収納された各種部材及び内視鏡2用の電源オン釦63が設けられている。
リモコン6には、ジョイスティック62が設けられている。このジョイスティック62は、内視鏡2の後述する挿入部21の湾曲部23を湾曲操作する際の湾曲入力制御部となる。また、リモコン6には、フレーム部4の内部に収納された各種部材及び内視鏡2用の電源オン釦63が設けられている。
さらに、フロントパネル5の上面には、内視鏡2の挿入部21を箱体81に対して出し入れするための開口が形成された座屈防止用のゴム部材52が配設されている。
この座屈防止用のゴム部材52は、内視鏡2の挿入部21が箱体81から取り出された際、内視鏡2の挿入部21がフロントパネル5の出口付近において座屈するのを防止するようになっている。
この座屈防止用のゴム部材52は、内視鏡2の挿入部21が箱体81から取り出された際、内視鏡2の挿入部21がフロントパネル5の出口付近において座屈するのを防止するようになっている。
前記内視鏡2は、柔軟性を有する細長の挿入部21を備えており、内視鏡2を使用する際は、挿入部21は、フロントパネル5から座屈防止用のゴム部材52を介して延出されるようになっている。
挿入部21には、先端側から順に硬質の先端部本体22、湾曲部23及び細長の柔軟性を有する可撓管部24が連設されている。前記湾曲部23は、多方向に湾曲自在となるよう形成されている。この湾曲部23は、リモコン6の操作により湾曲操作されることにより、先端部本体22内に配設された、後述する観察光学系の対物光学系16(図3参照)の観察方向を所望の方向に変更させることができるようになっている。
また、前記挿入部21の先端部本体22の先端には、視野方向及び視野角等の光学特性を変換する各種光学アダプタ25が着脱自在に接続されている。
次に、内視鏡2及びこの内視鏡2が巻き付けられるドラム部3の構成について図2乃至図4を参照しながら説明する。
図2は図1のドラム部3の内部の構成を示す正面図、図3は図1の内視鏡2の構成を示す横断面図、図4は図3のIV−IV線に沿う縦断面図である。
図2は図1のドラム部3の内部の構成を示す正面図、図3は図1の内視鏡2の構成を示す横断面図、図4は図3のIV−IV線に沿う縦断面図である。
図2に示すように、前記ドラム部3の上面板203、下面板204、及び外周面部31(図8乃至図10参照)によって形成された内部の空間には、光源部32、CCU33、及び電動湾曲駆動部34、電動湾曲回路部35等が収納されている。
光源部32は、ライトガイド受け部37に連結されることにより、内視鏡2の挿入部21に挿通されたライトガイド111の基端面に照明光を供給する。
光源部32は、ライトガイド受け部37に連結されることにより、内視鏡2の挿入部21に挿通されたライトガイド111の基端面に照明光を供給する。
CCU33は、内視鏡2の挿入部21の先端部本体22に配設された、後述する電荷結合素子型固体撮像素子(以下、CCDと称す)117(図3参照)に対する信号処理を行う。
電動湾曲駆動部34は、前記挿入部21の湾曲部23を湾曲させる際に駆動力を発する装置を有し、前記湾曲部23を湾曲動作させるものである。なお、電動湾曲駆動部34の構成については、図5以降において後述する。
電動湾曲回路部35は、リモコン6のジョイスティック62から入力された操作指示信号に基づき、前記電動湾曲駆動部34を駆動制御して内視鏡2の湾曲部23の湾曲状態を制御する回路等が設けられている。
図3に示すように、前記先端部本体22に着脱自在である光学アダプタ25は、アダプタ本体101に、アダプタ側光学系102と照明光学系103とが配設されて構成されている。
また、挿入部21内には、光源部32から供給された照明光を被検部位に伝送するライトガイド111が挿通されている。ライトガイド111の基端は、図2に示すように、口金となるライトガイドコネクタ112に固定されている。
また、挿入部21内には、光源部32から供給された照明光を被検部位に伝送するライトガイド111が挿通されている。ライトガイド111の基端は、図2に示すように、口金となるライトガイドコネクタ112に固定されている。
ライトガイドコネクタ112は、ライトガイドコネクタ受け部37に組み付けられており、ライトガイドコネクタ受け部37は、光源部32に連結されている。
図3に示すように、前記先端部本体22には、先端に照明窓113が配設されている。照明窓113には、照明用レンズ114が固定されている。照明用レンズ114の基端側には、前記ライトガイド111の先端が位置されている。
よって、光源部32から供給された照明光は、ライトガイド111を伝送し、ライトガイド111の先端面から照明用レンズ114を透過して、光学アダプタ25の照明光学系103をさらに透過して被検部位に照射される。
また、先端部本体22の先端には、さらに、照明窓113に隣接して撮像窓である観察窓115が配設されており、この観察窓115の基端側には、対物光学系116が配設されている。対物光学系116の結像位置には、CCD117が配設されている。
CCD117の外周には、複数の信号線118のそれぞれの一端が接続されており、複数の信号線118のそれぞれの他端は、図2に示すように、前記CCU33に接続されている。CCU33は、信号線118を介して送信されたCCD117によって撮像され光電変換された信号から標準的な映像信号を生成してモニタ7に出力する(図1参照)。このことにより、モニタ7の画面上には、被検部位の像である内視鏡撮像画像が表示される。
内視鏡2の湾曲部23は、環状に形成した複数の節輪121を光軸方向に沿って回動自在に連接したものに、網管122及びチューブ体123が被覆されることにより構成されている。節輪121の先端部は、先端部本体22の基端側の後端部に固定されている。 内視鏡2の湾曲部23の内部には、図4に示すように、ライトガイド111及び信号線118が、湾曲上下方向に対して縦列又は若干左右方向にずれる位置に配設されている。なお、チューブ体123の外周には、挿入部21の基端部までの略全域に沿って、外皮124が被覆されている。
節輪121の円環部の円周を略4等分する内周面の上下、右左方向に対応する位置には、図4に示すように、孔部125が、例えば4つ形成されている。これら4つの孔部125の内部には、アングルワイヤである湾曲操作ワイヤ131、132、133、134の挿入部側ワイヤ135、136、137、138が摺動可能に挿通されている。
挿入部側ワイヤ135〜138の先端部は、節輪121の先端部の上下、右左方向に対応する位置にそれそれ固定されている。このため、各方向に対応する挿入部側ワイヤ135〜138がそれぞれ電動湾曲駆動部34により牽引弛緩されることによって、内視鏡2の湾曲部23が所望の上下、右左方向の方向に湾曲操作される。
これによって、先端部本体22内に配設された、後述する観察光学系の対物光学系116(図3参照)の観察方向を、所望の上下、右左方向の方向に変更させることができるようになっている。また、挿入部側ワイヤ135〜138は、それぞれ、挿入部側ワイヤ135,136を一対とし、挿入部側ワイヤ137,138を一対として、主にステンレス等の2本の金属製の案内管139により、内視鏡挿入部21の基端側まで案内される。
挿入部側ワイヤ135〜138は、電動湾曲駆動部34に接続される。この接続状態をを図5乃至図7を参照しながら説明する。
図5乃至図7は図2のドラム部3の電動湾曲駆動部34を詳細に示した図であり、図5は電動湾曲駆動部34の拡大図、図6は図5のA矢視側面図、図7は図5とは反対の面を図示した拡大図である。
図6に示すように、一対の挿入部側ワイヤ135,136は、電動湾曲駆動部34上において、一対の電動湾曲駆動部側ワイヤ141,142に連結されている。一対の挿入部側ワイヤ137,138は、電動湾曲駆動部34上において、一対の電動湾曲駆動部側ワイヤ143,144に連結されている。
図5乃至図7は図2のドラム部3の電動湾曲駆動部34を詳細に示した図であり、図5は電動湾曲駆動部34の拡大図、図6は図5のA矢視側面図、図7は図5とは反対の面を図示した拡大図である。
図6に示すように、一対の挿入部側ワイヤ135,136は、電動湾曲駆動部34上において、一対の電動湾曲駆動部側ワイヤ141,142に連結されている。一対の挿入部側ワイヤ137,138は、電動湾曲駆動部34上において、一対の電動湾曲駆動部側ワイヤ143,144に連結されている。
なお、電動湾曲駆動部34には、内視鏡2の湾曲部23を、例えば上下方向、左右方向に湾曲させる、全く同じ機構である後述する一対のプーリユニット153、154が配設されている。
挿入部側ワイヤ135〜138と、電動湾曲駆動部側ワイヤ141〜144とは、湾曲操作ワイヤ131〜134を構成している。
なお、以下一対の挿入部側ワイヤ135,136を内視鏡2の湾曲部23の上下方向の湾曲用ワイヤとし、一対の挿入部側ワイヤ137,138を内視鏡2の湾曲部23の右左方向の湾曲用ワイヤとする。
なお、以下一対の挿入部側ワイヤ135,136を内視鏡2の湾曲部23の上下方向の湾曲用ワイヤとし、一対の挿入部側ワイヤ137,138を内視鏡2の湾曲部23の右左方向の湾曲用ワイヤとする。
図7に示すように、案内管139の基端部は、ドラム部3まで導出しており、ドラム部3内のベース体322上の第1の係止部、第2の係止部である係合支持部167a、167bによって係合支持されている。なお、前記ドラム部3の詳細な構成については後述する。
さらに、一対の挿入部側ワイヤ135、136と、一対の電動湾曲駆動部側ワイヤ141、142とは、図6に示すように、係合板金である前記係合支持部167a、167bとプーリユニツト153、154との中途位置において接続されており、その接続は雄ねじを有する雄ねじ口金168と、雌ねじを有する雌ねじ口金169とによってなされている。
なお、挿入部側ワイヤ137、138と、電動湾曲駆動部側ワイヤ143、144との接続も同様である。
雄ねじ口金168、雌ねじ口金169には、ネジロック等の化学的な緩み防止手段が設けられている。さらに、前記接続箇所には、雄ねじ口金168、雌ねじ口金169を被覆する熱収縮チューブを設けるようにしてもよい。
なお、挿入部側ワイヤ137、138と、電動湾曲駆動部側ワイヤ143、144との接続も同様である。
雄ねじ口金168、雌ねじ口金169には、ネジロック等の化学的な緩み防止手段が設けられている。さらに、前記接続箇所には、雄ねじ口金168、雌ねじ口金169を被覆する熱収縮チューブを設けるようにしてもよい。
なお、電動湾曲駆動部側ワイヤ141〜144は、挿入部側ワイヤ135〜138に比べ径の太いワイヤを使用している。つまり、電動湾曲駆動部側ワイヤ141〜144には、繰り返し曲げ耐性の高い、太くしなやかなワイヤを用いている。
例えば、挿入部側ワイヤ135〜138には、径寸法0.2〜0.5mm程度までの1×3、1×7本撚りのワイヤを使用し、電動湾曲駆動部側ワイヤ141〜144には、挿入部側ワイヤ135〜138よりも太径の、7×7、3×7、7×19本撚り等のワイヤを使用している。
さらに、電動湾曲駆動部側ワイヤ141〜144の基端部側には、電動湾曲駆動部側ワイヤ141〜144よりも径の大きい口金部である係止口金310(図13参照)がそれぞれ形成されている。
例えば、挿入部側ワイヤ135〜138には、径寸法0.2〜0.5mm程度までの1×3、1×7本撚りのワイヤを使用し、電動湾曲駆動部側ワイヤ141〜144には、挿入部側ワイヤ135〜138よりも太径の、7×7、3×7、7×19本撚り等のワイヤを使用している。
さらに、電動湾曲駆動部側ワイヤ141〜144の基端部側には、電動湾曲駆動部側ワイヤ141〜144よりも径の大きい口金部である係止口金310(図13参照)がそれぞれ形成されている。
また、可撓管部24の基端側に設け、外側にネジ部1403を有する基端口金1400は、図5に示すように、ベース体322に設けた固定金具1401に、内側にネジ部1404を有する固定リング1402の螺合することで固定されている。
電動湾曲駆動部34には、図6及び図7に示すように、プーリユニット153が配設されている。このプーリユニット153には、一対の挿入部側ワイヤ135、136に接続される一対の電動湾曲駆動部側ワイヤ141,142が巻き付けられている。
さらに、電動湾曲駆動部34には、同図に示すように、プーリユニット153と同一の構成を有するプーリユニット154が配設されている。このプーリユニット154には、一対の挿入部側ワイヤ137、138に接続される一対の電動湾曲駆動部側ワイヤ144、143が巻き付けられている。
プーリユニット153、154は、図7に示すように、それぞれ電動湾曲駆動部34に配設されたモータユニット211、212の出力軸217、218に回動自在に軸支されている。
この構成により、プーリユニット153、154が回動することにより、それぞれ湾曲操作ワイヤ131〜134の牽引弛緩が行われるようになっている。
この構成により、プーリユニット153、154が回動することにより、それぞれ湾曲操作ワイヤ131〜134の牽引弛緩が行われるようになっている。
前記電動湾曲駆動部34が収納されたドラム部3は、図2に示すように、外周面部31を有する管状部材201と、1組の円板部材202とにより構成されたフランジ形状を有している。この管状部材201には、内視鏡2を、箱体81(図1参照)に収納する際、内視鏡2の挿入部21が管状部材201の外周面部31に巻き付けられるようになっている。1組の円板部材202は、管状部材201の図中表面及び裏面の開口を閉鎖している。
なお、前記円板部材202は、図2に示すドラム部3の表面の開口を塞ぐ円板部材202を上面板203とし、ドラム部3の裏面の開口を塞ぐ円板部材202を下面板204とする。
また、前記電動湾曲駆動部34には、ケーブル165、230が接続されており、このケーブル165、230は、電動湾曲回路部35に接続されている。
また、前記電動湾曲駆動部34には、ケーブル165、230が接続されており、このケーブル165、230は、電動湾曲回路部35に接続されている。
次に、前記電動湾曲駆動部34を図5乃至図7を参照しながらさらに詳細に説明する。
図5に示すように、前記電動湾曲駆動部34には、この電動湾曲駆動部34のベースとなるベース体322が設けられている。
ベース体322には、それぞれモータユニット211、212が固定されており、このモータユニット211の出力軸217には、プーリユニット153が回動自在に軸支されている。また、モータユニット211には、出力軸218の回転角を検出する可変抵抗器であるポテンショメータ151が接続されている。
ベース体322には、それぞれモータユニット211、212が固定されており、このモータユニット211の出力軸217には、プーリユニット153が回動自在に軸支されている。また、モータユニット211には、出力軸218の回転角を検出する可変抵抗器であるポテンショメータ151が接続されている。
同様に、モータユニット212の出力軸218には、プーリユニット154が回動自在に軸支されている。また、モータユニット212には、出力軸218の回転角を検出する可変抵抗器であるポテンショメータ152が接続されている。
モータユニット211は、駆動力を発生させる駆動源となるモータ部320と、このモータ部320の駆動力を出力軸217まで伝達する平歯車や遊星歯車等の歯車列によって構成された減速ギヤ部321とにより、主要部が構成されている。また、モータユニット211は、プラス端子とマイナス端子を有し、両極端子から導出したケーブル230が電動湾曲回路部35に接続されている(図2参照)。
同様に、モータユニット212は、駆動力を発生させる駆動源となるモータ部320と、みの該モータ部320の駆動力を出力軸217まで伝達する平歯車や遊星歯車等の歯車列によって構成された減速ギヤ部321とにより、主要部が構成されている。また、モータユニット212は、プラス端子とマイナス端子を有し、両極端子から導出したケーブル230が電動湾曲回路部35に接続されている(図2参照)。
同様に、モータユニット212は、駆動力を発生させる駆動源となるモータ部320と、みの該モータ部320の駆動力を出力軸217まで伝達する平歯車や遊星歯車等の歯車列によって構成された減速ギヤ部321とにより、主要部が構成されている。また、モータユニット212は、プラス端子とマイナス端子を有し、両極端子から導出したケーブル230が電動湾曲回路部35に接続されている(図2参照)。
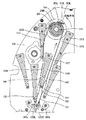
なお、本実施例では、図31及び図32に示すように、前記出力軸217、218に軸支されたプーリユニット153、154は、挿入部21の軸中心から所定の開き角θ(図中矢印で示す)で構成する開き角2001、開き角2002の範囲内で、且つドラム部3の管状部材201で形成された略扇状面内に配置されている。
また、図33に示すように、前記出力軸217、218は、ドラム部3の管状部材201と略同心円の円周2010上に配置されている。
さらに、図34に示すように、前記モータユニット211、212のモータ部320についても、ドラム部3の管状部材201と略同心円の円周2011上に配置されている。
また、図33に示すように、前記出力軸217、218は、ドラム部3の管状部材201と略同心円の円周2010上に配置されている。
さらに、図34に示すように、前記モータユニット211、212のモータ部320についても、ドラム部3の管状部材201と略同心円の円周2011上に配置されている。
ポテンショメータ151、152は、自身の抵抗値の上限、下限を示す第1,第2の端子及び回転位置に相応した抵抗値を示す第3の端子をそれぞれ有している。この3つの端子は、ケーブル165を介して、電動湾曲回路部35に接続されている(図2参照)。
ドラム部3の電動湾曲回路部35は、ポテンショメータ151、152が検出した出力軸217、218の現時点の回転位置情報と、リモコン6のジョイスティック62(図1参照)から伝送される操作指示信号とに基づいて、図8に示す電動湾曲駆動部34のモータユニット211、212を駆動制御する。このことにより、後述する機構により、内視鏡2の湾曲部23は、所望の方向へ湾曲されることになる。
ドラム部3の電動湾曲回路部35は、ポテンショメータ151、152が検出した出力軸217、218の現時点の回転位置情報と、リモコン6のジョイスティック62(図1参照)から伝送される操作指示信号とに基づいて、図8に示す電動湾曲駆動部34のモータユニット211、212を駆動制御する。このことにより、後述する機構により、内視鏡2の湾曲部23は、所望の方向へ湾曲されることになる。
なお、内視鏡2の湾曲部23の最大湾曲角度となるポテンショメータ151、152の回転位置情報は、電動湾曲回路部35上にデフォルト値として記憶されている。つまり、その値までは、後述するプーリユニット153、154が回動自在となる。但し、デフォルト値といってもその数値を変更できない訳ではなく、内視鏡装置1に、図示しないパーソナルコンピュータを接続することにより、任意の値に修正が可能となる。
また、前記電動湾曲駆動部34及び前記電動湾曲回路部35は、上述したように、ドラム部3内に収納され、フレーム部4に対し回動自在となっている。
次に、本実施例における電動湾曲駆動部34の詳細な構成について、図8乃至図10を参照しながら説明する。
図8は図5のA−A線断面図、図9は図5のB−B線断面図、図10は図5のC−C線断面図である。また、図11及び図12は図8の構成を補足的に説明するためのもので、図11は電動湾曲駆動部34の一部破断した分解組み立て図、図12は図11に示す電動湾曲駆動部34の一部破断した側面断面図である。なお、図11及び図12において、モータユニット212側はモータユニット211側と同様であるため説明を省略する。
次に、本実施例における電動湾曲駆動部34の詳細な構成について、図8乃至図10を参照しながら説明する。
図8は図5のA−A線断面図、図9は図5のB−B線断面図、図10は図5のC−C線断面図である。また、図11及び図12は図8の構成を補足的に説明するためのもので、図11は電動湾曲駆動部34の一部破断した分解組み立て図、図12は図11に示す電動湾曲駆動部34の一部破断した側面断面図である。なお、図11及び図12において、モータユニット212側はモータユニット211側と同様であるため説明を省略する。
図11及び図12に示すように、保持板1008は、中央に出力軸217が貫通する軸孔部1002と、保持板側ストッパ1001aが螺合するネジ孔1009と、皿ネジ1006が夫々入る皿孔1007と、ビス1010が夫々貫通する孔部1009とを有している。
この保持板1008は、皿ネジ1006によってモータユニット211と固定され、ビス1010によってベース体322と固定される。
詳しくは、保持板1008の皿孔1007に皿ネジ1006が夫々通され、これら皿ネジ1006がモータユニット211のケーシング1000の一表面に設けられるネジ孔部1015と夫々に螺合する。したがって、保持板1008とモータユニット211とは一体になるよう固定される。
詳しくは、保持板1008の皿孔1007に皿ネジ1006が夫々通され、これら皿ネジ1006がモータユニット211のケーシング1000の一表面に設けられるネジ孔部1015と夫々に螺合する。したがって、保持板1008とモータユニット211とは一体になるよう固定される。
また、保持板1008の孔部1009にビス1010が夫々通され、これらビス1010がベース体のビス孔1011に夫々螺合し、保持板1008とベース体322とが一体となるよう固定される。その結果、モータユニット211、保持板1008及びベース体322は一体となる。
なお、保持板1008の孔部1009と皿孔1007は、皿ネジ1006またはビス1010が夫々対応するモータユニット211またはベース体322のネジ孔部1015またはビス孔1011と螺合できる位置に設けてある。
保持板1008のネジ孔1009に螺合する保持板側ストッパ1001aは、略円柱形をしており、ストッパ円板1004の円板側ストッパ1003の側面である当接部が当接する面を有している。また、このネジ孔1009は、後述する出力軸217に係合するストッパ円板1004の外周と所定の距離に離間しあ位置の保持板1008に設けられるネジ溝である。
保持板1008のネジ孔1009に螺合する保持板側ストッパ1001aは、略円柱形をしており、ストッパ円板1004の円板側ストッパ1003の側面である当接部が当接する面を有している。また、このネジ孔1009は、後述する出力軸217に係合するストッパ円板1004の外周と所定の距離に離間しあ位置の保持板1008に設けられるネジ溝である。
図12に示すように、保持板側ストッパ1001a及びストッパ円板1004は、夫々ベース体322の孔部1005の孔厚、つまりベース体322の板厚内に収められる。このようにして形成された電動湾曲駆動部34のA−A線(図6参照)断面が図8に示されている。
次に、図8を参照しながら、ベース体322と、仕切り板1202、仕切り板1203によって形成した2層の空間の内、円筒状の支柱部材1204によってベース体322側と仕切り板1202によって形成される空間に設けた、右左方向の湾曲を行なうプーリユニット154の構成を説明する。
その前に、図13及び図14を参照しながらプーリユニット154の構成を説明する。なお、図13及び図14はプーリユニット154の構成を説明するためのもので、図13はプーリユニット154の上面図、図14はプーリユニット154の側面断面図である。
図14に示すように、プーリユニット154は、出力軸218に回動自在に軸支された、出力軸218の外周に当接する位置に外向鍔部301Fを有する中空の略円板状のプーリ本体301と、このプーリ本体301の外向鍔部301F以外の部位を挟接する中空の2枚の円板部材302と、これら2枚の円板部材302のそれぞれに配設された係止部である係止部材303L、303Rとにより、主要部が構成されている。
係止部材303L、303Rは、台形の回転体形状を有する本体と、この本体の下面に形成された円板状の脚部306L、306Rと、により構成されている。即ち、係止部材303L、303Rは、はす歯形状を有している。
係止部材303L、303Rの本体の外周面は、それぞれ斜面部309L,309Rを形成しており、また、係止部材303L、303Rの下面には、前記脚部を貫通し、前記本体に穿設された凹状の挿通路307L、307Rがそれぞれ形成されている。
また、係止部材303L、303Rの前記本体であって、斜面部309L、309Rの一部には、プーリ本体301に一対の電動湾曲駆動部側ワイヤ144、143が巻き付けられた際、一対の電動湾曲駆動部側ワイヤ144,143の基端部側に形成された係止口金310L、310Rが係止される係止面311L、311Rが図13に示すようにそれぞれ形成されている。
係止部材303Lの係止面311Lは、係止部材303Lが電動湾曲駆動部側ワイヤ144を後述する手段によって牽引していない状態においては、図13に示すように、プーリ本体301が牽引弛緩される方向のプーリ本体301の中心軸800を用いてプーリ本体301を2つの領域に分けた際、電動湾曲駆動部側ワイヤ144を巻き取る方向となる側のプーリ本体301の一方の領域(図13中、中心軸800より下側の領域)に位置している。
また、係止部材303Rの係止面311Rは、係止部材303Rが電動湾曲駆動部側ワイヤ143を後述する手段によって牽引していない状態においては、図13に示すように、プーリ本体301が牽引弛緩される方向のプーリ本体301の中心軸800を用いてプーリ本体301を2つの領域に分けた際、電動湾曲駆動部側ワイヤ143を巻き取る方向となる側のプーリ本体301の他方の領域(図13中、中心軸800より上側の領域)に位置している。
さらに、言い換えると、前記一対の係止面311L,311Rは、一対の係止部材303L、303Rが一対の電動湾曲駆動部側ワイヤ144、143をそれぞれ牽引していない状態においては、プーリ本体301が牽引弛緩される方向の図13に示すプーリ本体301の中心軸800を用いてプーリ本体301を2つの領域に分けた際、2つの領域に中心軸800に対して点対称となる位置にそれぞれ位置している。
一方の円板部材302の一部には、孔部305Lが形成されている。また、他方の円板部材302の孔部305Lに対向する位置であって出力軸218の中心軸800に対して点対称となる位置には、孔部305Rが形成されている。
図14に示すように、係止部材303Lの脚部306Lは、一方の円板部材302の孔部305Lに回動自在に嵌入しており、係止部材303Rの脚部306Rは、他方の円板部材302の孔部305Rに回動自在に嵌入している。
プーリ本体301の外周面には、中心軸800に直交する軸900の図14中上側であって、一方の円板部材302の孔部305Lが形成された近傍に、溝部304Lが外周面に沿って形成されている。この溝部304Lには、係止部材303Lの前記本体の一部が回動自在に嵌入している。
また、出力軸218の中心軸800に直交する軸900の図14中下側には、電動湾曲駆動部側ワイヤ143が巻き付けられる巻回面308Rが形成されている。
さらに、プーリ本体301の外周面には、出力軸218の中心軸800に直交する軸900の図14中下側であって、他方の円板部材302の孔部305Rが形成された近傍に、溝部304Rが外周面に沿って形成されている。この溝部304Rには、係止部材303Rの前記本体の一部が回動自在に嵌入している。
さらに、プーリ本体301の外周面には、出力軸218の中心軸800に直交する軸900の図14中下側であって、他方の円板部材302の孔部305Rが形成された近傍に、溝部304Rが外周面に沿って形成されている。この溝部304Rには、係止部材303Rの前記本体の一部が回動自在に嵌入している。
また、出力軸218の中心軸800に直交する軸900の図14中上側には、電動湾曲駆動部側ワイヤ144が巻き付けられる巻回面308Lが形成されている。
このように構成されたプーリユニット154のプーリ本体301には、一対の電動湾曲駆動部側ワイヤ144、143が巻き付けられている。詳しくは、電動湾曲駆動部側ワイヤ144は、係止部材303Lの挿通路307L、及び係止部材303Rの斜面部309Rに案内されてプーリ本体301の外周面の巻回面308Lに巻き付けられる。
また、電動湾曲駆動部側ワイヤ143は、係止部材303Rの挿通路307R、及び係止部材303Lの斜面部309Lに案内されてプーリ本体301の外周面の巻回面308Rに巻き付けられている。
ここで、図9に示すように、電動湾曲駆動部34には、プーリ154から電動湾曲駆動部側ワイヤ143、144を包囲するように、ガイド1213、1214設けてある。これらガイド1213、1214には、電動湾曲駆動部側ワイヤ143、144ないしは、雄ねじ口金168または雌ねじ口金169の位置を規制する壁面1215、1216が設けられている。
なお、前記プーリユニット154近傍におけるガイドとしては、電動湾曲駆動部側ワイヤ143、144の外側となるガイド1213、1214の他に、電動湾曲駆動部側ワイヤ143、144の間に位置するガイド1217が設けられており、すなわち、これからガイドは、プーリユニット154近傍の少なくとも3箇所に設けられている。
ガイド1213は、電動湾曲駆動部側ワイヤ143と相対する側の壁面1215を有している。ガイド1214は、電動湾曲駆動部側ワイヤ143と相対する側の壁面1216を有している。
また、ガイド1217は、電動湾曲駆動部側ワイヤ143と相対する側の壁面1218と、電動湾曲駆動部側ワイヤ144と相対する側の壁面1219とを有している。
なお、これらガイド1213、1214、1217は、支柱部材1204とともに仕切り板1202(図10参照)とベース体322(図9参照)によって形成する空間の厚さ方向の位置決めとしても使用される。
また、ベース体322には、ガイドとして、ガイド1209、1211、1212が設けてあるが、ガイド1209、1212は雄ねじ口金168または雌ねじ口金169の位置規制を行なものとして使用される。また、ガイド1212は後述するガイド1210、ガイド1211は後述するガイド1207の台座として使用される。さらに、ガイド1217は後述するガイド1208の台座としても使用される。
次に、図10を参照しながら、ベース体322と、仕切り板1202、仕切り板1203によって形成した2層の空間の内、円筒状の支柱部材1204によりある一定の間隔を離間して仕切り板1202、仕切り板1203とから形成される空間に設けた、上下方向の湾曲を行なう、プーリユニット153の構成を説明する。
その前に、図15及び図16を参照しながら、プーリユニット153の構成を説明する。なお、図15及び図16はプーリユニット153の構成を説明するためのもので、図15はプーリユニット153の上面図、図16はプーリユニット153の側面断面図である。
図15に示すように、プーリユニット153は、出力軸217に回動自在に軸支された、出力軸217の外周に当接する位置に外向鍔部301Fを有する中空の略円板状のプーリ本体301と、該プーリ本体301の外向鍔部301F以外の部位を挟接する中空の2枚の円板部材302と、該2枚の円板部材302のそれぞれに配設された係止部である係止部材303とにより主要部が構成されている。
係止部材303U,303Dは、台形の回転体形状を有する本体と、この本体の下面に形成された円板状の脚部306U、306Dと、により構成されている。即ち、係止部材303U、303Dは、はす歯形状を有している。
係止部材303U、303Dの本体の外周面は、それぞれ斜面部309U、309Dを形成しており、また、係止部材303U、303Dの下面には、前記脚部を貫通し、前記本体に穿設された凹状の挿通路307U,307Dがそれぞれ形成されている。
また、係止部材303U、303Dの前記本体であって、斜面部309U、309Dの一部には、プーリ本体301に一対の電動湾曲駆動部側ワイヤ141、142が巻き付けられた際、一対の電動湾曲駆動部側ワイヤ141、142の基端部側に形成された係止口金310U,310Dが係止される係止面311U、311Dが図15に示すようにそれぞれ形成されている。
係止部材303Uの係止面311Uは、係止部材303Uが電動湾曲駆動部側ワイヤ141を後述する手段によって牽引していない状態においては、図15に示すように、プーリ本体301が牽引弛緩される方向のプーリ本体301の中心軸800を用いてプーリ本体301を2つの領域に分けた際、電動湾曲駆動部側ワイヤ141を巻き取る方向となる側のプーリ本体301の一方の領域(図15中、中心軸800より下側の領域)に位置している。
また、係止部材303Dの係止面311Dは、係止部材303Dが電動湾曲駆動部側ワイヤ142を後述する手段によって牽引していない状態においては、図15に示すように、プーリ本体301が牽引弛緩される方向のプーリ本体301の中心軸800を用いてプーリ本体301を2つの領域に分けた際、電動湾曲駆動部側ワイヤ142を巻き取る方向となる側のプーリ本体301の他方の領域(図11中、中心軸800より上側の領域)に位置している。
さらに、言い換えると、前記一対の係止面311U、311Dは、一対の係止部材303U、303Dが一対の電動湾曲駆動部側ワイヤ141,142をそれぞれ牽引していない状態においては、プーリ本体301が牽引弛緩される方向の図15に示すプーリ本体301の中心軸800を用いてプーリ本体301を2つの領域に分けた際、2つの領域に中心軸800に対して点対称となる位置にそれぞれ位置している。
一方の円板部材302の一部には、孔部305Uが形成されている。また、他方の円板部材302の孔部305Uに対向する位置であって出力軸217の中心軸800に対して点対称となる位置には、孔部305Dが形成されている。
図15に示すように、係止部材303Uの脚部306Uは、一方の円板部材302の孔部305Uに回動自在に嵌入しており、係止部材303Dの脚部306Dは、他方の円板部材302の孔部305Dに回動自在に嵌入している。
図15に示すように、係止部材303Uの脚部306Uは、一方の円板部材302の孔部305Uに回動自在に嵌入しており、係止部材303Dの脚部306Dは、他方の円板部材302の孔部305Dに回動自在に嵌入している。
プーリ本体301の外周面には、厚み方向の中点よりも表面側、即ち出力軸217の中心軸800に直交する軸900の図16中上側であって、一方の円板部材302の孔部305Uが形成された近傍に、溝部304Uが外周面に沿って形成されている。この溝部304Uには、係止部材303Uの前記本体の一部が回動自在に嵌入している。
また、プーリ本体301の外周面であって、溝部304Uが形成されていない厚み方向の中点よりも裏面側、即ち出力軸217の中心軸800に直交する軸900の図16中上側には、電動湾曲駆動部側ワイヤ141が巻き付けられる巻回面308Uが形成されている。
さらに、プーリ本体301の外周面には、厚み方向の中点よりも裏面側、即ち出力軸217の中心軸800に直交する軸900の図16中下側であって、他方の円板部材302の孔部305Dが形成された近傍に、溝部304Dが外周面に沿って形成されている。この溝部304Dには、係止部材303Dの前記本体の一部が回動自在に嵌入している。
また、プーリ本体301の外周面であって、溝部304Dが形成されていない厚み方向の中点よりも表面側、即ち出力軸217の中心軸800に直交する軸900の図16中下側には、電動湾曲駆動部側ワイヤ142が巻き付けられる巻回面308Dが形成されている。
このように構成されたプーリユニット153のプーリ本体301には、一対の電動湾曲駆動部側ワイヤ141、142が巻き付けられている。詳しくは、電動湾曲駆動部側ワイヤ141は、係止部材303Uの挿通路307U、及び係止部材303Dの斜面部309Dに案内されてプーリ本体301の外周面の巻回面308Uに巻き付けられる。
また、電動湾曲駆動部側ワイヤ142は、係止部材303Dの挿通路307D、及び係止部材303Uの斜面部309Uに案内されてプーリ本体301の外周面の巻回面308Dに巻き付けられている。
さらに、図10に示すように、電動湾曲駆動部34には、プーリ153から電動湾曲駆動部側ワイヤ141、142を包囲するように、ガイド1207、1208が設けられている。これらガイド1207、1208には、電動湾曲駆動部側ワイヤ141、142ないしは、雄ねじ口金168または雌ねじ口金169に当接し、電動湾曲駆動部側ワイヤ141、142の位置を規制する壁面1220、1223が設けられている。
なお、前記プーリユニット153近傍におけるガイドとしては、電動湾曲駆動部側ワイヤ141、142の外側となるガイド1207、1208の他に、電動湾曲駆動部側ワイヤ141、142の間に位置するガイド1210が設けられており、すなわち、これからガイドは、プーリユニット153近傍の少なくとも3箇所に設けられている。
ガイド1207は、電動湾曲駆動部側ワイヤ141と相対する側の壁面1223を有している。ガイド1208は、電動湾曲駆動部側ワイヤ141と相対する側の壁面1220を有している。
また、ガイド1210は、電動湾曲駆動部側ワイヤ141と相対する側の壁面1222と、電動湾曲駆動部側ワイヤ142と相対する側の壁面1221とを有している。
なお、ガイド1207、1208、1210は、支柱部材1204とともに仕切り板1202(図10参照)と仕切り板1203(図9参照)によって形成する空間の厚さ方向の位置決めとしても使用される。
なお、図7に示すように、仕切り板1203、仕切り板1202は、ベース体322に対して支柱部材1204を貫通させて設けたビス1205のベース体322への螺合によって固定される。また、仕切り板1203、仕切り板1202は、ベース体322に対して、ガイド1207、1211、1210、1212に貫通指させて設けたビス1206のベース体322への螺合によって固定される。
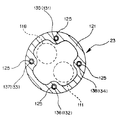
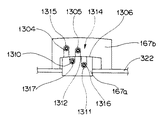
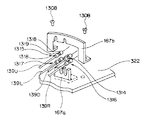
次に、前記係合支持部167a、167bの構成について図17乃至図20を参照しながら説明する。図17乃至図20は係合支持部167a、167bの構成を説明するためのもので、図17は係合支持部167a、167bとベース体322の分解組み立て図、図18は組み立て後の係合支持部167a、167bの正面図、図19は組み立て後の係合支持部167a、167bの斜視図、図20は係合支持部167a、167bに係合される係止口金1314乃至1318を説明する斜視図である。
図17に示すように、ベース体322には、係合支持部167a、167bが両面側より固定される固定ビス穴1300と、係合支持部167aのアーチ部1302を通す穴部1301とが設けてある。
係合支持部167aのアーチ部1302には、2つの係止溝1310、1311が設けられている。これらの係止溝1310、1311は、図18及び図19に示すように、案内管139の基端側に設けた太径部1318、細径部1319(図20参照)を有する係止口金1316、1317を係止するために、一部を開口した切欠部である。
なお、係止溝1310は、アーチ部1302端部の閉鎖部となる第1の平面部1312から切り欠いて設けた左方向湾曲用の溝である。また、係止溝1311は、前記第1の平面部1312から切り欠いて設けた右方向湾曲用の溝である。
なお、係止溝1310は、アーチ部1302端部の閉鎖部となる第1の平面部1312から切り欠いて設けた左方向湾曲用の溝である。また、係止溝1311は、前記第1の平面部1312から切り欠いて設けた右方向湾曲用の溝である。
また、図17に示すように、係合支持部167bには、ベース体322と当接し、ビス1313によって螺合される鍔部1309が設けられている。
係合支持部167bのアーチ部1303には、2つの係止溝1304、1305が設けられている。これらの係止溝1304、1305は、図18及び図19に示すように、案内管139の基端側に設けた太径部1318、細径部1319(図20参照)を有する係止口金1314、1315を係止するために、一部を開口した切欠部である。
なお、係止溝1304は、アーチ部1303端部の閉鎖部となる第2の平面部1306から切り欠いて設けた上方向湾曲用(U側)の溝である。また、係止溝1305は、前記第2の平面部1306から切り欠いて設けた下方向湾曲用(D側)の溝である。
なお、係止溝1304は、アーチ部1303端部の閉鎖部となる第2の平面部1306から切り欠いて設けた上方向湾曲用(U側)の溝である。また、係止溝1305は、前記第2の平面部1306から切り欠いて設けた下方向湾曲用(D側)の溝である。
また、図17に示すように、係合支持部167bには、ベース体322と当接し、ビス1308によって螺合される鍔部1307が設けられている。
なお、本実施例において、前記アーチ部1302、1303は、それぞれの係止溝に対応する複数のアーチ状の曲面を有して構成されているが、1つのアーチ形状の曲面を有して構成しても良い。
(作用)
次に、本実施例の作用について図17乃至図30を参照しながら説明する。
図20に示すように、まず、最初にベース体322に係合支持部167aが取り付けられ、その後、係止口金1314〜1317が、係合支持部167aともう一つの係合支持部167bに係止されるよう、取り付けられる。
次に、本実施例の作用について図17乃至図30を参照しながら説明する。
図20に示すように、まず、最初にベース体322に係合支持部167aが取り付けられ、その後、係止口金1314〜1317が、係合支持部167aともう一つの係合支持部167bに係止されるよう、取り付けられる。
そして、係止溝1304と第1の平面部1312によって形成される係止空間にU側の係止口金1315が、D側の係止溝1305と第1の平面部1312によって形成される係止空間にD側の係止口金1314が、R側の係止溝1304と第2の平面部1306によって形成される係止空間にR側の係止口金1316が、L側の係止溝1310と第2の平面部1306によって形成される係止空間にL側の係止口金1317が係合され、案内管139が固定される。
係止溝1304、1305と平面部1306、1312によって形成される空間は、3面が平面で残りが係止口金1314〜1317よりもやや大きな径を有する曲面となる。 この空間が係止口金1314〜1317に設けた細径部1319を係止することで、案内管139は係合支持部167a、167bに固定され、次のように使用される。
なお、係合支持部167a、167bがアーチ状に案内管139を保持して、プーリユニット153、154に向かって滑らかに湾曲操作ワイヤ131〜134を導出する。つまり、案内管139に急激な曲げなどを加えることがない。
次に、このように構成された内視鏡装置1の使用方法について説明する。
まず、使用者は、収納ケース8の蓋体82を開け、ACケーブル51を電源に接続する。次いで、使用者は、リモコン6を取り出した後、内視鏡2の挿入部21の先端部本体22の近傍を把持して、ゆっくりと挿入部21を引き出す。
まず、使用者は、収納ケース8の蓋体82を開け、ACケーブル51を電源に接続する。次いで、使用者は、リモコン6を取り出した後、内視鏡2の挿入部21の先端部本体22の近傍を把持して、ゆっくりと挿入部21を引き出す。
使用者が挿入部21を引き出すことにより、挿入部21が外周面部31に巻き付けられているドラム部3が回転する。よって、ドラム部3は、収納ケース8から座屈防止用のゴム部材52を介して外方に挿入部21を供給する。なお、この作業は、リモコン6を用いて電動により行っても良い。
さらに、使用者は、検査に必要な光学アダプタ25を選択してこの光学アダプタ25を先端部本体22に取り付け、リモコン6の電源オン釦63をオンにする。このことによって、内視鏡2は検査可能な状態となる。
次に、検査の際の内視鏡2の湾曲部23の湾曲操作及びリモコン6の操作による電動湾曲駆動部34の駆動動作について説明する。
使用者は、リモコン6のジョイスティック62を上下左右の所望する方向に操作すると、ジョイスティック62の傾き角度に相応した信号が、図5〜図10に示す電動湾曲回路部35に伝送される。
使用者は、リモコン6のジョイスティック62を上下左右の所望する方向に操作すると、ジョイスティック62の傾き角度に相応した信号が、図5〜図10に示す電動湾曲回路部35に伝送される。
電動湾曲回路部35は、ジョイスティック62の操作信号を受けて、電動湾曲駆動部34のモータユニット211、212のモータ部320(図8乃至図10参照)の前記操作信号に相応する回転量を演算処理して算出する一方、この演算結果に対応する回転指示信号をモータユニット211、212に送信する。
モータユニット211、212は、電動湾曲回路部35から伝送された前記回転指示信号を受けて回転する。このときのモータユニット211、212のモータ部320の回転は、減速ギヤ部321(図6参照)を介して出力軸217、218に伝達され、これらの出力軸217、218が回転する。
すると、出力軸217、218の回転に伴い、プーリユニット153、154がそれぞれ回転することになる。
すると、出力軸217、218の回転に伴い、プーリユニット153、154がそれぞれ回転することになる。
次に、プーリユニット153、154の作用について説明する。
まず、プーリユニット154の回転について図21乃至図25を参照しながら説明する。図21乃至図25はプーリユニット154の作用を説明するためのもので、図21は回転前のプーリユニットの状態を示す横断面図、図22はプーリユニットが図21に示す位置から反時計回りに一定量回転したことを示す横断面図、図23はプーリユニットが図22に示す位置から反時計回りに一定量回転したことを示す横断面図、図24はプーリユニットが図23に示す位置から反時計回りに一定量回転したことを示す横断面図、図25はプーリユニットが図23に示す位置から反時計回りに一定量回転し、最大湾曲角度まで回転したことを示す横断面図である。
まず、プーリユニット154の回転について図21乃至図25を参照しながら説明する。図21乃至図25はプーリユニット154の作用を説明するためのもので、図21は回転前のプーリユニットの状態を示す横断面図、図22はプーリユニットが図21に示す位置から反時計回りに一定量回転したことを示す横断面図、図23はプーリユニットが図22に示す位置から反時計回りに一定量回転したことを示す横断面図、図24はプーリユニットが図23に示す位置から反時計回りに一定量回転したことを示す横断面図、図25はプーリユニットが図23に示す位置から反時計回りに一定量回転し、最大湾曲角度まで回転したことを示す横断面図である。
まず、プーリユニット154の回転により電動湾曲駆動部側ワイヤ143を巻き取る方向について説明する。プーリユニット154の出力軸218が、図21に示す位置から反時計周りに回転すると、プーリユニット154のプーリ本体301は、反時計回りに回転する。
つまり、プーリユニット154は、このプーリユニット154に配設された係止部材303Rの挿通路307R(図14参照)に電動湾曲駆動部側ワイヤ143を挿通させ、係止面311R(図13参照)にて、電動湾曲駆動部側ワイヤ143の係止口金310Rを係止した状態において、図21に示す位置から図22、図23、図24に示す位置を経て図25に示す位置まで、反時計周りに回転していく。このことにより、プーリユニット154は、電動湾曲駆動部側ワイヤ143をプーリ本体301の巻回面308Rに巻き取る。
これによって、電動湾曲駆動部側ワイヤ143が牽引されるため、雄ねじ口金168、雌ねじ口金169によって接続された挿入部側ワイヤ137が牽引される。このことにより、内視鏡2の湾曲部23は、挿入部側ワイヤ137によって牽引された方向、例えば右方向に湾曲される。
一方、係止部材303Lの挿通路307L(図14参照)に挿通され、巻回面308Lに一部が巻き付けられている、巻き取られない電動湾曲駆動部側ワイヤ144は、プーリ本体301が、図21に示す位置から反時計回りに回転することにより、図22に示すように電動湾曲駆動部側ワイヤ144にたるみが生じ、壁面1216に当接する。
そして、そのまま、図22のように反時計回りに回動することにより、挿入部側ワイヤ138と電動湾曲駆動部側ワイヤ144を連結する雌ねじ口金169が壁面1219に当接し、挿入部側ワイヤ138から電動湾曲駆動部側ワイヤ144に掛けて、壁面1216と壁面1219によって位置規制された状態となる。これにより、電動湾曲駆動部側ワイヤ144の係止口金310Lが、係止部材303Lの係止面311Lから、図23に示すように離間する。
その後、電動湾曲駆動部側ワイヤ144が、挿通路307Lを摺動する。またその際、プーリ本体301は、図24に示す位置を経て図25に示す位置まで回転する。
このとき、電動湾曲駆動部側ワイヤ144及びこれに接続された挿入部側ワイヤ138は、わずかに挿入部側に引き込まれるものの積極的に押し戻している訳ではないため、徐々に電動湾曲駆動部側ワイヤ144に、図23、図24、図25に示すように、余剰部144Tが発生することとなる。
このとき、電動湾曲駆動部側ワイヤ144及びこれに接続された挿入部側ワイヤ138は、わずかに挿入部側に引き込まれるものの積極的に押し戻している訳ではないため、徐々に電動湾曲駆動部側ワイヤ144に、図23、図24、図25に示すように、余剰部144Tが発生することとなる。
つまり、図21から図25に示すように、徐々に係止口金310Lが、係止部材303Lから遠ざかり、電動湾曲駆動部側ワイヤ144の余剰部144Tは、挿入部21側とは反対の側であるプーリユニット154の基端側で発生する。図25では、電動湾曲駆動部側ワイヤ144は直線状となり、電動湾曲駆動部側ワイヤ144の曲げ負荷は、ほぼ0(ゼロ)となる。
なお、係止部材303は、円板部材302に対して回動自在であるため、電動湾曲駆動部側ワイヤ143,144の軌道に応じて、図21乃至図25に示すように向きを回転できるため、プーリユニット154の回動による電動湾曲駆動部側ワイヤ143,144への負荷を軽減することができる。
このような構成によれば、プーリユニット154の回動による挿入部側ワイヤ137、138の牽引弛緩によって、挿入部側ワイヤ137、138に接続された電動湾曲駆動部側ワイヤ143、144に座屈等急激な負荷が発生することがない。
よって、挿入部側ワイヤ137、138及び電動湾曲駆動部側ワイヤ143、144によって構成される湾曲操作ワイヤ133、134の消耗を防止することができる。
なお、プーリユニット154を回転させるプーリ出力軸218の回転量は、上述したように、ポテンショメータ152により検知される。詳しくは、モータ部320(図8乃至図10参照)は、常時、出力軸218の回転位置をポテンショメータ152においてモニタリングされた状態にて動作するようになっている。
よって、挿入部側ワイヤ137、138及び電動湾曲駆動部側ワイヤ143、144によって構成される湾曲操作ワイヤ133、134の消耗を防止することができる。
なお、プーリユニット154を回転させるプーリ出力軸218の回転量は、上述したように、ポテンショメータ152により検知される。詳しくは、モータ部320(図8乃至図10参照)は、常時、出力軸218の回転位置をポテンショメータ152においてモニタリングされた状態にて動作するようになっている。
したがって、電動湾曲回路部35は、演算処理して算出した算出値と、ポテンショメータ152によって検知した出力軸218の回転位置とが一致した段階において、モータ部320の動作が停止するようモータ部320を制御する。
なお、以上の説明は、電動湾曲駆動部側ワイヤ144を牽引し、電動湾曲駆動部側ワイヤ143を弛緩する場合においても同様である。
なお、以上の説明は、電動湾曲駆動部側ワイヤ144を牽引し、電動湾曲駆動部側ワイヤ143を弛緩する場合においても同様である。
次に、プーリユニット153の回転について図26乃至図30を参照しながら説明する。図26乃至図30はプーリユニット153の作用を説明するためのもので、図26は回転前のプーリユニットの状態を示す横断面図、図27はプーリユニットが図26に示す位置から反時計回りに一定量回転したことを示す横断面図、図28はプーリユニットが図27に示す位置から反時計回りに一定量回転したことを示す横断面図、図29はプーリユニットが図28に示す位置から反時計回りに一定量回転したことを示す横断面図、図30はプーリユニットが図29に示す位置から反時計回りに一定量回転し、最大湾曲角度まで回転したことを示す横断面図である。
まず、プーリユニット153の回転により電動湾曲駆動部側ワイヤ142を巻き取る方向について説明する。プーリユニット153の出力軸217が、図26に示す位置から反時計周りに回転すると、プーリユニット153のプーリ本体301は、反時計回りに回転する。
つまり、プーリユニット153は、該プーリユニット153に配設された係止部材303Dの挿通路307D(図16参照)に電動湾曲駆動部側ワイヤ142を挿通させ、係止面311D(図15参照)にて、電動湾曲駆動部側ワイヤ142の係止口金310Dを係止した状態において、図26に示す位置から図27、図28、図29に示す位置を経て図30に示す位置まで、反時計周りに回転していく。このことにより、プーリユニット153は、電動湾曲駆動部側ワイヤ142をプーリ本体301の巻回面308Dに巻き取る。
これによって、電動湾曲駆動部側ワイヤ142が牽引されるため、雄ねじ口金168、雌ねじ口金169によって接続された挿入部側ワイヤ136が牽引される。このことにより、内視鏡2の湾曲部23は、挿入部側ワイヤ136によって牽引された方向、ここでは下方向に湾曲される。
一方、係止部材303Uの挿通路307U(図15参照)に挿通され、巻回面308Uに一部が巻き付けられている、巻き取られない電動湾曲駆動部側ワイヤ141は、プーリ本体301が、図26に示す位置から反時計回りに回転することにより、図27に示すように電動湾曲駆動部側ワイヤ144にたるみが生じ、壁面1223に当接する。
そして、そのまま図27のように反時計回りに回動することにより、挿入部側ワイヤ135と電動湾曲駆動部側ワイヤ141を連結する雄ねじ口金168が壁面1222に当接し、挿入部側ワイヤ135から電動湾曲駆動部側ワイヤ141に掛けて、壁面1223と壁面1222によって位置規制された状態となる。これにより、電動湾曲駆動部側ワイヤ141の係止口金310Uが、係止部材303Uの係止面311Uから、図28に示すように離間する。
その後、電動湾曲駆動部側ワイヤ141が、挿通路307Uを摺動する。またその際、プーリ本体301は、図29に示す位置を経て図30に示す位置まで回転する。
このとき、電動湾曲駆動部側ワイヤ141及びこれに接続された挿入部側ワイヤ135は、わずかに挿入部側に引き込まれるものの積極的に押し戻している訳ではないため、徐々に電動湾曲駆動部側ワイヤ141に、図28、図29、図30に示すように、余剰部141Tが発生することとなる。
このとき、電動湾曲駆動部側ワイヤ141及びこれに接続された挿入部側ワイヤ135は、わずかに挿入部側に引き込まれるものの積極的に押し戻している訳ではないため、徐々に電動湾曲駆動部側ワイヤ141に、図28、図29、図30に示すように、余剰部141Tが発生することとなる。
つまり、図26から図30に示すように、徐々に係止口金310Uが、係止部材303Uから遠ざかり、電動湾曲駆動部側ワイヤ141の余剰部141Tは、挿入部21側とは反対の側であるプーリユニット153の基端側で発生する。図30では、電動湾曲駆動部側ワイヤ141は直線状となり、電動湾曲駆動部側ワイヤ141の曲げ負荷は、ほぼ0(ゼロ)となる。
なお、係止部材303は、円板部材302に対して回動自在であるため、電動湾曲駆動部側ワイヤ141、142の軌道に応じて、図26乃至図30に示すように向きを回転できるため、プーリユニット153の回動による電動湾曲駆動部側ワイヤ141、142への負荷を軽減することができる。
このような構成によれば、プーリユニット153の回動による挿入部側ワイヤ135、136の牽引弛緩によって、挿入部側ワイヤ135、136に接続された電動湾曲駆動部側ワイヤ141、142に座屈等急激な負荷が発生することがない。
よって、挿入部側ワイヤ135、136及び電動湾曲駆動部側ワイヤ141、142によって構成される湾曲操作ワイヤ131、132の消耗を防止することができる。
なお、プーリユニット153を回転させるプーリ出力軸217の回転量は、上述したように、ポテンショメータ151により検知される。詳しくは、モータ部320(図8乃至図10参照)は、常時、出力軸217の回転位置をポテンショメータ151においてモニタリングされた状態にて動作するようになっている。
なお、プーリユニット153を回転させるプーリ出力軸217の回転量は、上述したように、ポテンショメータ151により検知される。詳しくは、モータ部320(図8乃至図10参照)は、常時、出力軸217の回転位置をポテンショメータ151においてモニタリングされた状態にて動作するようになっている。
したがって、電動湾曲回路部35は、演算処理して算出した算出値と、ポテンショメータ151によって検知した出力軸217の回転位置とが一致した段階において、モータ部320の動作が停止するようモータ部320を制御する。
なお、以上の説明は、電動湾曲駆動部側ワイヤ141を牽引し、電動湾曲駆動部側ワイヤ142を弛緩する場合においても同様である。
なお、以上の説明は、電動湾曲駆動部側ワイヤ141を牽引し、電動湾曲駆動部側ワイヤ142を弛緩する場合においても同様である。
以上の操作によって、ジョイスティック62(図1参照)が操作された際、内視鏡2の湾曲部23は、所望の方向に湾曲されて、湾曲部23は、先端部本体22内に配設された、後述する観察光学系の対物光学系116(図3参照)の観察方向を所望の方向に変更させることができる。このような作用させることにより、被検部位の観察を行うことができる。
また、本実施例の内視鏡装置1は、以上の動作によって、湾曲動作がなされるが、前記出力軸217、218が開き角2001、2002内(図31及び図32参照)に収まるよう配置されており、湾曲操作ワイヤ131〜134が滑らかにプーリユニット153、154に巻回されることになる。
(効果)
以上、述べたように、本発明の第1実施例における内視鏡装置1においては、出力軸217、218が開き角2001、2002内に収まるよう配置されており、挿入部21に対して湾曲操作ワイヤ131〜134に大きな角度をつけることなく滑らかにプーリユニット153、154に巻回され、湾曲操作ワイヤ131〜134の案内管139との摩擦ロスを少なくでき、湾曲操作ワイヤ131〜134の耐久性を向上できる。
また、本実施例の内視鏡装置1は、摩擦ロスが少ないことで、湾曲操作ワイヤ131〜134を牽引する力量が小さくて済み、モータユニット211、212の大型化を防止できる。
以上、述べたように、本発明の第1実施例における内視鏡装置1においては、出力軸217、218が開き角2001、2002内に収まるよう配置されており、挿入部21に対して湾曲操作ワイヤ131〜134に大きな角度をつけることなく滑らかにプーリユニット153、154に巻回され、湾曲操作ワイヤ131〜134の案内管139との摩擦ロスを少なくでき、湾曲操作ワイヤ131〜134の耐久性を向上できる。
また、本実施例の内視鏡装置1は、摩擦ロスが少ないことで、湾曲操作ワイヤ131〜134を牽引する力量が小さくて済み、モータユニット211、212の大型化を防止できる。
なお、本実施例において、図31及び図32に示す所定角θは、30°程度までであれば、摩擦ロスを極力小さくしつつ、モータユニット211、212をドラム部3内に配置することができる。
また、本実施例では、使用頻度の高い上下方向湾曲を行なうプーリユニット153を挿入部中心軸上に配設し、使用頻度の低い左右方向湾曲を行なうプーリユニット154を開き角2001寄りに設けている。また、湾曲操作ワイヤ131〜134の種類を適切にして、使用頻度の差を問わない場合は、前記プーリユニット153と前記プーリユニット154の位置を変えても問題はない。
また、本実施例では、使用頻度の高い上下方向湾曲を行なうプーリユニット153を挿入部中心軸上に配設し、使用頻度の低い左右方向湾曲を行なうプーリユニット154を開き角2001寄りに設けている。また、湾曲操作ワイヤ131〜134の種類を適切にして、使用頻度の差を問わない場合は、前記プーリユニット153と前記プーリユニット154の位置を変えても問題はない。
(構成)
図35及び図36は本発明の第2実施例を示す内視鏡装置の構成及び作用を説明するためのもので、図35は本実施例の内視鏡装置に設けられた第1乃至第4ギヤを有するドラム部の環状部材201の配置構成を示す横断面図、図36は図35に示す主要部分近傍の断面図である。なお、図35及び図36は、前記第1実施例の内視鏡装置と同様の作用、効果を有する構成要素については同一の符号を付して説明を省略する。
図35及び図36は本発明の第2実施例を示す内視鏡装置の構成及び作用を説明するためのもので、図35は本実施例の内視鏡装置に設けられた第1乃至第4ギヤを有するドラム部の環状部材201の配置構成を示す横断面図、図36は図35に示す主要部分近傍の断面図である。なお、図35及び図36は、前記第1実施例の内視鏡装置と同様の作用、効果を有する構成要素については同一の符号を付して説明を省略する。
本実施例の内視鏡装置は、ドラム部3内の他の内蔵物のレイアウトの都合上、モータユニット211を離れた箇所に配置しなければならない状況であっても、前記第1実施例と同様の効果を得るように構成されている。
具体的には、図35に示すように、本実施例の内視鏡装置は、ベース体322上に、プーリユニット154を軸支する軸体2003を有する第1ギヤ2004と、第2ギヤ2005と歯合する第2ギヤ2005と、第2ギヤ2005と歯合する第3ギヤ2006と、第3ギヤ2006と歯合する第4ギヤ2007とが配置されており、前記第4ギヤ2007はモータユニット212の出力軸218と連結している。
前記第1乃至第3ギヤ2004〜2007は、図36に示すように、前記ベース体322のプーリユニット154側の面にそれぞれ配置され且つ軸支されている。
なお、本実施例において、軸体2003及びプーリユニット154は、前記第1実施例と同様に所定の角度θ(図31及び図32参照)と、管状部材201で形成した略扇状面内に配設されるようになっている。
前記第1乃至第3ギヤ2004〜2007は、図36に示すように、前記ベース体322のプーリユニット154側の面にそれぞれ配置され且つ軸支されている。
なお、本実施例において、軸体2003及びプーリユニット154は、前記第1実施例と同様に所定の角度θ(図31及び図32参照)と、管状部材201で形成した略扇状面内に配設されるようになっている。
その他の構成は、前記第1実施例と同様である。
(作用)
次に、本実施例の作用について図35及び図36を参照しながら説明する。
本実施例の内視鏡装置1において、いま、図36に示すモータ部320が動作したとする。すると、減速ギヤ部321内の輪列が回動し、出力軸218が回動する。
そして、第4ギヤ2007、第3ギヤ2006、第2ギヤ2005、第1ギヤ2004が順次連動して回動し、プーリユニット154を軸支した軸体2003が回動することで、プーリユニット154が回動することになる。
その他の作用は、前記第1実施例と同様である。
次に、本実施例の作用について図35及び図36を参照しながら説明する。
本実施例の内視鏡装置1において、いま、図36に示すモータ部320が動作したとする。すると、減速ギヤ部321内の輪列が回動し、出力軸218が回動する。
そして、第4ギヤ2007、第3ギヤ2006、第2ギヤ2005、第1ギヤ2004が順次連動して回動し、プーリユニット154を軸支した軸体2003が回動することで、プーリユニット154が回動することになる。
その他の作用は、前記第1実施例と同様である。
(効果)
したがって、本実施例によれば、ドラム部3内の他の内蔵物のレイアウトの都合上、モータユニット212を離れた場所に配置しなければならない状況であっても、前記した第1乃至第4ギヤ2004〜2007によって輪列を組むことで、軸体2003及びプーリユニット2154を前記したドラム部3内の扇状面内に配置できれば、湾曲操作ワイヤ131〜134の摩擦ロスを低減でき、前記第1実施例と同様の効果が得られる。
なお、本実施例では、モータユニット212について述べたが、モータユニット211側であっても、両方のモータユニット212、211であっても何ら問題はない。
したがって、本実施例によれば、ドラム部3内の他の内蔵物のレイアウトの都合上、モータユニット212を離れた場所に配置しなければならない状況であっても、前記した第1乃至第4ギヤ2004〜2007によって輪列を組むことで、軸体2003及びプーリユニット2154を前記したドラム部3内の扇状面内に配置できれば、湾曲操作ワイヤ131〜134の摩擦ロスを低減でき、前記第1実施例と同様の効果が得られる。
なお、本実施例では、モータユニット212について述べたが、モータユニット211側であっても、両方のモータユニット212、211であっても何ら問題はない。
本発明は、上述した第1及び第2実施例に限定されるものではなく、発明の要旨を逸脱しない範囲で種々変形実施可能である。
1…内視鏡装置、
2…内視鏡、
3…ドラム部、
4…フレーム部、
5…フロントパネル、
6…リモコン、
7…モニタ、
8…収納ケース、
16…対物光学系、
21…挿入部、
21…内視鏡挿入部、
22…先端部本体、
23…湾曲部、
24…可撓管部、
25…各種光学アダプタ、
25…光学アダプタ、
32…光源部、
34…電動湾曲駆動部、
35…電動湾曲回路部、
62…ジョイスティック、
63…電源オン釦、
81…箱体、
82…蓋体、
102…アダプタ側光学系、
103…照明光学系、
111…ライトガイド、
112…ライトガイドコネクタ、
113…照明窓、
114…照明用レンズ、
115…観察窓、
116…対物光学系、
118…信号線、
1207〜1217…ガイド、
1215〜1223…壁面、
1224…円弧部、
1226…凸部、
1227、1228…壁面、
1229、1230…斜面部、
1302、1303…アーチ部、
1304、1305…係止溝、
131〜134…湾曲操作ワイヤ、
1314〜1317…係止口金、
1318…太径部、
1319…細径部、
135〜138…挿入部側ワイヤ、
139…案内管、
141〜144…電動湾曲駆動部側ワイヤ、
141T…余剰部、
144T…余剰部、
151、152…ポテンショメータ、
153、154…プーリユニット、
167a、167b…係合支持部、
168…雄ネジ口金、
169…雌ネジ口金、
211〜213…モータユニット、
217、218…出力軸、
301…プーリ本体、
303L、303R…係止部材、
303U、303D…係止部材。
代理人 弁理士 伊 藤 進
2…内視鏡、
3…ドラム部、
4…フレーム部、
5…フロントパネル、
6…リモコン、
7…モニタ、
8…収納ケース、
16…対物光学系、
21…挿入部、
21…内視鏡挿入部、
22…先端部本体、
23…湾曲部、
24…可撓管部、
25…各種光学アダプタ、
25…光学アダプタ、
32…光源部、
34…電動湾曲駆動部、
35…電動湾曲回路部、
62…ジョイスティック、
63…電源オン釦、
81…箱体、
82…蓋体、
102…アダプタ側光学系、
103…照明光学系、
111…ライトガイド、
112…ライトガイドコネクタ、
113…照明窓、
114…照明用レンズ、
115…観察窓、
116…対物光学系、
118…信号線、
1207〜1217…ガイド、
1215〜1223…壁面、
1224…円弧部、
1226…凸部、
1227、1228…壁面、
1229、1230…斜面部、
1302、1303…アーチ部、
1304、1305…係止溝、
131〜134…湾曲操作ワイヤ、
1314〜1317…係止口金、
1318…太径部、
1319…細径部、
135〜138…挿入部側ワイヤ、
139…案内管、
141〜144…電動湾曲駆動部側ワイヤ、
141T…余剰部、
144T…余剰部、
151、152…ポテンショメータ、
153、154…プーリユニット、
167a、167b…係合支持部、
168…雄ネジ口金、
169…雌ネジ口金、
211〜213…モータユニット、
217、218…出力軸、
301…プーリ本体、
303L、303R…係止部材、
303U、303D…係止部材。
代理人 弁理士 伊 藤 進
Claims (3)
- 可撓性を有し、細長な挿入部を備えた内視鏡と、前記内視鏡の先端部分に設けられる湾曲操作される湾曲部と、外周面に前記挿入部を巻回収納する環状のドラム部と、前記ドラム部内に設けられ、前記挿入部の基端部と前記湾曲部から延出される湾曲操作ワイヤを巻回する回転体とを有する内視鏡装置において、
前記挿入部の基端部から、前記挿入部の中心軸に対し所定の角度を成す直線と、前記ドラム部の前記外周面からなる略扇状の範囲内に、前記回転体を配設したことを特徴とする内視鏡装置。 - 可撓性を有し、細長な挿入部を備えた内視鏡と、前記内視鏡の先端部分に設けられる湾曲操作される湾曲部と、外周面に前記挿入部を巻回収納する環状のドラム部と、前記ドラム部内に設けられ、前記挿入部の基端部と前記湾曲部から延出される湾曲操作ワイヤを巻回する回転体とを有する内視鏡装置において、
前記ドラム部と略同心円状の円周上に前記回転体を配設したことを特徴とする内視鏡装置。 - 前記湾曲部から延出される湾曲操作ワイヤを外嵌する外装体と、前記湾曲操作ワイヤを牽引動作させる湾曲動作手段と、前記湾曲動作手段に設けられ、前記外装体に設けた口金を係止する係止手段とを有していることを特徴とする請求項1又は請求項2に記載の内視鏡装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004308648A JP2006116151A (ja) | 2004-10-22 | 2004-10-22 | 内視鏡装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004308648A JP2006116151A (ja) | 2004-10-22 | 2004-10-22 | 内視鏡装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006116151A true JP2006116151A (ja) | 2006-05-11 |
Family
ID=36534582
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004308648A Pending JP2006116151A (ja) | 2004-10-22 | 2004-10-22 | 内視鏡装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006116151A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150366435A1 (en) * | 2014-06-20 | 2015-12-24 | Cook Medical Technologies Llc | Mechanism of small drive wire retention on spool |
| US10357634B2 (en) | 2016-07-28 | 2019-07-23 | Cook Medical Technologies Llc | Steerable catheter with wire-tensioning mechanism |
| JP2021159525A (ja) * | 2020-04-02 | 2021-10-11 | Hoya株式会社 | 内視鏡装置 |
-
2004
- 2004-10-22 JP JP2004308648A patent/JP2006116151A/ja active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150366435A1 (en) * | 2014-06-20 | 2015-12-24 | Cook Medical Technologies Llc | Mechanism of small drive wire retention on spool |
| CN106455939A (zh) * | 2014-06-20 | 2017-02-22 | 库克医学技术有限责任公司 | 小型驱动线保持在线轴上的机构 |
| US9750397B2 (en) * | 2014-06-20 | 2017-09-05 | Cook Medical Technologies Llc | Mechanism of small drive wire retention on spool |
| US10357634B2 (en) | 2016-07-28 | 2019-07-23 | Cook Medical Technologies Llc | Steerable catheter with wire-tensioning mechanism |
| JP2021159525A (ja) * | 2020-04-02 | 2021-10-11 | Hoya株式会社 | 内視鏡装置 |
| JP7412253B2 (ja) | 2020-04-02 | 2024-01-12 | Hoya株式会社 | 内視鏡装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8753261B2 (en) | Endoscope apparatus | |
| US20060089532A1 (en) | Method and apparatus for advancing an instrument along an arbitrary path using an introducer sheath | |
| US20050154258A1 (en) | Endoscope with adjacently positioned guiding apparatus | |
| CN1684625A (zh) | 钢筋束驱动的内窥镜以及插入方法 | |
| JP4526284B2 (ja) | 内視鏡装置 | |
| JPWO2013031280A1 (ja) | 内視鏡 | |
| JP5457318B2 (ja) | 内視鏡 | |
| US20210113070A1 (en) | Spiral tube and endoscope | |
| JP2006116151A (ja) | 内視鏡装置 | |
| JP6072390B1 (ja) | 医療機器用の駆動力伝達機構 | |
| JP4658536B2 (ja) | 内視鏡装置 | |
| JPWO2018025435A1 (ja) | 挿入装置 | |
| JP4418171B2 (ja) | 内視鏡装置 | |
| JP4575110B2 (ja) | 内視鏡装置 | |
| JP2005218569A (ja) | 内視鏡装置 | |
| JP2006068448A (ja) | 内視鏡装置 | |
| JP2006116150A (ja) | 内視鏡装置 | |
| JP5283463B2 (ja) | 内視鏡 | |
| JPWO2018025437A1 (ja) | 挿入装置 | |
| US20190104924A1 (en) | Insertion apparatus | |
| JP2009183619A (ja) | 内視鏡 | |
| KR20210113895A (ko) | 일회용 내시경용 튜브 장치 | |
| JP4783462B2 (ja) | 内視鏡装置の収納ケース | |
| JP2003121759A (ja) | 内視鏡装置 | |
| JP4647904B2 (ja) | 内視鏡装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071018 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100415 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100420 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100817 |