JP2006123762A - 車両制御装置 - Google Patents
車両制御装置 Download PDFInfo
- Publication number
- JP2006123762A JP2006123762A JP2004315533A JP2004315533A JP2006123762A JP 2006123762 A JP2006123762 A JP 2006123762A JP 2004315533 A JP2004315533 A JP 2004315533A JP 2004315533 A JP2004315533 A JP 2004315533A JP 2006123762 A JP2006123762 A JP 2006123762A
- Authority
- JP
- Japan
- Prior art keywords
- brake
- torque
- drive torque
- vehicle
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Regulating Braking Force (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
【解決手段】車両に制動力と駆動力との両方が加えられる状態において、制動力が減少させられた場合に、それに伴って駆動力を減少させる。それによって、実効駆動力を一定に保つことができ、加速度を一定に保つことができる。また、その後、駆動力を増加させるため、運転者の意図する加速度が得られる。
【選択図】図7
Description
特許文献2には、車両が坂道に停止している状態において、変速機のギヤ位置を運転者によって操作されたシフト位置とは関係なく切り換えるとともに、駆動源の駆動トルクを制御することにより、坂道の傾斜により車両に加えられる駆動力と駆動源の駆動力とが釣り合う状態とした後に、パーキングブレーキを解除するとともに、変速機のギヤ位置を運転者によって操作されたシフト位置に対応する位置に戻すことが記載されている。このようにすれば、坂道において車両を停止状態に保つために必要な制動力を小さくすることができる。
特許文献3には、シフト位置が走行を表す位置に切り換えられた場合に、パーキングブレーキを解除することが記載されている。
特許文献4には、車両が坂道に停止している状態から発進する場合に、坂道の傾斜により車両に加わる駆動力とシフト位置で決まる駆動源の駆動力とが同じ向きである場合には逆向きである場合より、パーキングブレーキをゆっくりに解除することが記載されている。それによって、車両の急発進を抑制することができる。
本項に記載の車両制御装置において、車両に、ブレーキの作動による制動力と駆動源による駆動力との両方が加えられる状態において、制動力が小さくされた場合に駆動力が減少側に変化させられる。例えば、平坦な路面上において、ブレーキにより車両に加えられる制動力と駆動源により車両に加えられる駆動力とは互いに逆向きであり、駆動力から制動力を引いた力が、車両を実際に移動させる力(以下、実効駆動力と称する)として作用する。この場合に、制動力が減少させられると実効駆動力が大きくなり、加速度が急激に大きくなったり、急発進したりする。特に、自動ブレーキ装置においては、ブレーキ作用力が運転者のブレーキ解除操作によらないで減少させられることがあり、運転者は違和感を感じる。そこで、ブレーキ作用力の減少に伴って駆動トルクを小さくすれば、ブレーキ作用力の減少に起因する実効駆動力の急激な増加を回避することができる。
なお、本明細書において、ブレーキ作用力の減少に伴って車輪に加わる制動トルクが減少し、車両に加わる制動力が減少するものとする。同様に、駆動源の駆動トルクの変化に伴って車両に加わる駆動力(駆動源の駆動力)が変化するものとする。
駆動トルク減少側変化部は、ブレーキの作用力が小さくされる以前より、駆動トルク自体を減少させるものとしたり、駆動トルクの増加勾配を小さくするものとしたりすることができる。また、駆動トルクを、ブレーキ作用力の減少状態に応じて減少側に変化させるものとすることができる。例えば、駆動トルクをブレーキ作用力の減少勾配と同じ勾配で減少させたり、駆動トルクの増加勾配を、ブレーキ作用力の減少勾配に応じた勾配だけ小さくしたりすることができる。
駆動トルク減少側変化部は、ブレーキ作用力が減少させられる間、すなわち、ブレーキ作用力の減少が開始されてから終了させられるまでの間(作用力が設定値以下になるまでの間)、駆動トルクを減少側に変化させるものとすることができる。ブレーキ作用力の減少が終了した後に、駆動トルクを減少側に変化させることの必要性は低いからである。
また、ブレーキが液圧ブレーキである場合には、自動ブレーキ作動装置は、動力により液圧を発生させる動力式液圧源とブレーキシリンダの液圧を制御可能な液圧制御装置とを含むものとされ、電動ブレーキである場合には、電動モータへの供給電流を制御可能な電動モータ制御回路を含むものとされ、パーキングブレーキである場合には、ケーブルに張力を加える張力付与用モータと、その張力付与用モータへの供給電流を制御可能な電動モータ制御回路とを含むものとされる。
駆動源は、エンジン等の内燃機関を含むものとしたり、駆動用の電動モータを含むものとしたりすることができる。駆動源がエンジンを含む場合には、燃料噴射量やスロットル開度等を制御する装置が駆動トルク制御装置に対応し、駆動用モータを含む場合には、インバータ等の電動モータ制御回路等が対応する。
前記車両の駆動源と、その駆動源の駆動トルクを制御可能な駆動トルク制御装置とを含む駆動装置と
を含む車両制御装置であって、
前記駆動トルク制御装置が、前記ブレーキの作用力が小さくされた場合に、前記駆動トルクを、前記ブレーキの作用力が小さくされる以前より、減少側に変化させる駆動トルク減少側変化部を含むことを特徴とする車両制御装置。
(2)前記駆動トルク減少側変化部が、前記駆動トルクを、前記ブレーキ作用力の減少勾配に応じた勾配だけ小さくした勾配で変化させる勾配減少部を含む(1)項に記載の車両制御装置。
本項に記載の車両制御装置においては、駆動トルクの変化勾配が、ブレーキ作用力が小さくされる以前の勾配よりブレーキ作用力の減少勾配に応じた勾配だけ小さくされ、その小さくされた勾配で駆動トルクが変化させられる。
(3)前記駆動トルク減少側変化部が、前記駆動トルクを、前記ブレーキ作用力の減少勾配に応じた勾配で減少させる駆動トルク減少部を含む(1)項または(2)項に記載の車両制御装置。
ブレーキ作用力が小さくされる以前において駆動トルクが一定である(駆動トルクの変化勾配が0である)場合には、駆動トルクはブレーキ作用力の減少勾配に応じた勾配で減少させられる(駆動力が制動力の減少勾配と同じ勾配で減少させられる)。この場合には、ブレーキ作用力の減少中において実効駆動力が一定に保たれる。
(4)前記駆動トルク減少側変化部が、前記駆動トルクを、車両の加速度が一定に保たれるように変化させる定加速度対応変化部を含む(1)項ないし(3)項のいずれか1つに記載の車両制御装置。
実効駆動力が一定で、一定の加速度で車両が走行している状態で、ブレーキ作用力が小さくされるとともに、その減少勾配に応じた勾配で駆動トルクが小さくされれば、実効駆動力を一定の大きさに保つことができ、車両の加速度を一定の大きさに保つことができる。
(5)前記駆動トルク減少側変化部が、前記駆動トルクの増加勾配を、前記ブレーキ作用力の減少勾配に応じた勾配だけ小さくし、その勾配で駆動トルクを変化させる増加勾配抑制部を含む(1)項ないし(4)項のいずれか1つに記載の車両制御装置。
(6)前記駆動トルク減少側変化部が、前記駆動トルクを、運転者の要求する加速度が得られるように変化させる要求加速度対応制御部を含む(1)項ないし(5)項のいずれか1つに記載の車両制御装置。
駆動トルクが増加傾向にある場合にブレーキ作用力が小さくされた場合に、駆動トルクの増加勾配がブレーキ作用力の減少勾配に応じた勾配だけ小さくされれば、実効駆動力の増加勾配を運転者の要求する増加勾配に近づけることができ、加速度を運転者の要求する勾配で増加させることができる。
駆動トルクが減少側に変化させられた後には駆動トルクを回復させておくことが望ましい。その意味において、駆動トルク増加側変化部は駆動トルク回復部と称することができる。
また、駆動トルクは、その時点における運転者のアクセル操作部材の操作状態に基づいて決まる大きさまで増加させたり、ブレーキ作用中のアクセル操作状態に基づいて決まる大きさまで増加させたりすることができる(この場合には、駆動トルク復帰部と称することもできる)。増加側変化部は、シフト位置に加えてアクセル操作状態に応じて増加側に変化させるものとすることもできる。
(8)前記駆動トルク増加側変化部が、前記駆動トルクが減少側に変化させられた後に、駆動トルクを一定に保った後、増加側に変化させる保持後増加部を含む(7)項に記載の車両制御装置。
駆動トルクが減少させられた後、直ちに、増加させると駆動トルクの変化が大きくなり、望ましくない。それに対して、一定に保った後に増加させれば、変化を抑制することができる。
駆動トルクを一定に保つ保持時間は、予め定められた設定時間としてもアクセル操作部材の操作状態、シフト操作部材の操作状態等で決まる時間としてもよい。
なお、駆動トルクを一定に保つのではなく、設定勾配以下の緩やかな勾配で増加させることもできる。このようにしても、駆動トルクの変化を抑制することができる。
(9)前記駆動トルク増加側変化部が、前記シフト位置検出装置によって検出された位置が後退を表す位置である場合に、前記駆動トルクを予め定められた一律の態様で変化させる一律変化部を含む(7)項または(8)項のいずれか1つに記載の車両制御装置。
車両を後退させる場合には、運転者は、比較的小さい速度で後退させることが多く、しかも、運転者個々の差は小さい。
そのため、シフト位置が後退を表す位置である場合には、駆動トルクを予め定められた一律の態様で変化させても差し支えない。例えば、予め定められた設定時間だけ保持した後に予め定められた設定勾配で増加させたり、設定時間だけ保持した後に予め定められたパターンに従って増加させたり(例えば、予め定められたパターンに従って段階的に増加させたり、予め定められた曲線に沿って増加させたり)することができる。
(10)前記一律変化部が、前記駆動トルクを予め定められた設定時間だけ一定に保った後に、予め定められた増加勾配で増加させるものである設定勾配増加部を含む(9)項に記載の車両制御装置。
(11)前記駆動トルク増加側変化部が、前記シフト位置検出装置によって検出された位置が前進を表す位置である場合に、運転者によるアクセル操作部材の操作状態に応じた態様で前記駆動トルクを変化させるアクセル操作対応変化部を含む(7)項ないし(10)項のいずれか1つに記載の車両制御装置。
車両を前進させる場合には、運転者は、アクセル操作部材の操作に応じた加速度で前進させることを望むのが普通である。そのため、アクセル操作部材の操作状態に応じて回復させることが望ましい。
(12)前記アクセル操作対応変化部が、前記駆動トルクを一定に保った後に、運転者のアクセル操作部材の操作状態で決まる勾配で増加させるアクセル対応勾配増加部を含む(11)項に記載の車両制御装置。
本項に記載の車両制御装置によれば、運転者のアクセル操作部材の操作状態に応じた加速度で車両を前進させることができる。
また、駆動トルクは一定に保たれた後に増加させられるが、駆動トルクを保持する時間は予め定められた設定時間としても、アクセル操作状態に応じて決まる時間としてもよい。
(13)前記駆動トルク増加側変化部が、前記シフト位置検出装置により検出されたシフト位置の切り換えパターンに応じて、前記駆動トルクを増加側に変化させるものである(7)項ないし(12)項のいずれか1つに記載の車両制御装置。
シフト位置がドライブ位置あるいはリバース位置にある状態においてアクセル操作部材が操作された場合、シフト位置が、パーキング位置、ニュートラル位置、リバース位置からドライブ位置に切り換えられた場合、パーキング位置、ニュートラル位置、ドライブ位置からリバース位置に切り換えられた場合に、車両を発進させる意図、あるいは、加速させる意図があると考えることができる。
したがって、シフト位置の切り換え態様で決まるパターンで駆動トルクを増加させれば、運転者の要求を反映させることができる。
運転者のアクセル操作部材の操作状態に応じて駆動トルクを制御することは妥当なことである。例えば、駆動トルクを、アクセル操作部材の操作状態に応じて決まる時間だけ保持した後に、アクセル操作状態で決まる勾配で増加させることができる、アクセル操作部材の操作速度が大きい場合は小さい場合より保持時間を短くすることができる。
(15)前記自動ブレーキ装置が、予め定められた条件が満たされた場合に、前記ブレーキの作用力を減少させるものであるブレーキ解除装置を含む(1)項ないし(14)項のいずれか1つに記載の車両制御装置。
ブレーキは、運転者によってシフト位置が、パーキング P、ニュートラルN、ドライブDからリバースRへ切り換えられた場合、あるいは、パーキングP、ニュートラルN、リバースRからドライブDへ切り換えられたことを含む条件が満たされた場合に解除されるようにしたり、アクセル操作部材が操作されたことを含む条件が満たされた場合に解除されるようにしたりすること等ができる。
車両が坂道に停止している場合には、シフト位置を傾斜により車両に加えられる駆動力とエンジン駆動力とが逆向きになる位置とし、走行する場合に、車両を移動させようとする位置に切り換える場合がある。その場合には、ドライブDからリバースRへ切り換えられたり、リバースRからドライブDへ切り換えられたりする。
前記車両の駆動源と、その駆動源の駆動トルクを制御可能な駆動トルク制御装置とを含む駆動装置と、
前記ブレーキの作用力と前記駆動トルクとのいずれか一方が小さくされた場合に、それに応じて、他方を変化させる協調制御装置と
を含むことを特徴とする車両制御装置。
本項に記載の車両制御装置には、(1)項ないし(15)項のいずれか1つに記載の技術的特徴を採用することができる。
車両の停止中においては、駆動源が自動で停止させられる場合がある。駆動トルクが漸減させられるのであるが、それに応じて、車両を停止状態に保ち得るように制動トルクが制御される。例えば、坂道において、傾斜により車両に加えられる駆動力と駆動源の駆動力とが逆向きで、制動力と駆動源の駆動力とが同じ向きである場合に、駆動源が自動で停止させられる場合に制動力が大きくされれば、車両を坂道において停止状態に保つことができる。
図1において、左右後輪12,14の各々に電動パーキングブレーキ22,24が設けられる。ケーブル26は、イコライザ28を介して張力付与装置30に接続される。
電動パーキングブレーキ22,24は、ケーブル26に加えられる引張力により作動させられるものであり、引張力により摩擦部材を車輪とともに回転するブレーキ回転体に押し付けることにより、車輪の回転を抑制する。
張力付与装置30は、正・逆両方向に回転可能な電動モータ(張力付与用モータと称することもできる)42,電動モータ42への供給電流を制御可能な駆動回路44,電動モータ42の駆動力をケーブル26に入力するケーブル入力装置46等を含む。ケーブル入力装置46は複数のギヤを含み、電動モータ42により、ケーブル26が引っ張られたり、緩められたりする。また、電動モータ42が停止状態にされてもケーブル26はその状態に保たれ、逆に、電動モータ42に電流が供給されない状態で、ケーブル26に張力が加わっても、それによって電動モータ42が回転させられることはなく、電動パーキングブレーキ22,24において作用力が維持される。
また、ブレーキECU50には、コンピュータを主体とするエンジンECU60が接続される。エンジンECU60には、シフト位置検出装置62,アクセル開度検出装置64、駆動トルク検出装置66等が接続されるとともにエンジン68が接続される。シフト位置検出装置62は、運転者によって操作可能なシフト操作部材70の位置を検出するものであり、アクセル開度検出装置64は、アクセル操作部材72の開度を検出するものであり、駆動トルク検出装置66は、エンジン回転数を検出する回転数検出装置等を含み、回転数等に基づいて駆動トルクを検出するものである。エンジン68には、燃料噴射装置、スロットルバルブ駆動装置等が含まれ、燃料噴射量、スロットル開度等の制御により駆動トルクが制御される。エンジンECU60の記憶部には、図4のフローチャートで表される駆動トルク制御プログラム等が格納される。
以下、本実施例においては、ケーブル26の張力が緩められると、電動パーキングブレーキ22,24の作用力が小さくなり、車輪に加わる制動トルク、車両に加わる制動力が小さくなると考える。また、ケーブル26の張力、電動パーキングブレーキ22,24の作用力、制動トルク、制動力は、互いに対応する大きさであると考え、これらの1つの物理量の大きさがわかれば、他の物理量の大きさもわかると考える。以下、ケーブル26の張力が緩められること、ブレーキ作用力が小さくされること、制動トルクが小さくされること、制動力が小さくされることは、互いに同じ事項を表す言葉として使用する。駆動トルクについても同様であり、エンジン駆動トルクに応じた駆動力が車両に加わると考える。
電動パーキングブレーキ22,24は、パーキングスイッチ54が操作されたこと、車両が停止状態にあり、かつ、シフト位置がパーキング位置(P)に切り換えられたこと等の予め定められたパーキングブレーキ作動条件が満たされた場合に作動させられる。
そして、シフト位置がドライブ位置(D)に切り換えられたこと、シフト位置がリバース位置(R)に切り換えられたこと、アクセル操作部材72が操作されたこと等の1つ以上を含む予め定められたパーキングブレーキ解除条件が満たされた場合に、運転者の操作とは関係なく解除される。これらの場合には、運転者に車両を発進させる意図があると考えられるからである。また、車両に加えられるエンジン駆動力は、エンジンのアイドル状態において、シフト位置が上述のように切り換えられた場合、シフト位置がドライブDあるいはリバースRにある場合にアクセル操作部材が操作された場合等に増加させられる。そのため、これらの場合にブレーキ作用力が減少させられるようにすることは妥当なことである。
エンジン68は、アクセル操作部材72の操作に応じて、アクセル開度に応じた駆動トルクが得られるように制御される。
この場合において、パーキングブレーキ解除条件が満たされて、運転者によるブレーキ解除操作が行われることなく、電動パーキングブレーキ22,24の作用力が小さくされることによって制動力が小さくされると、実効駆動力が大きくなり、車両が急発進する(あるいは加速度が急激に大きくなる)おそれがある。そこで、本実施例においては、パーキングブレーキの作用力の減少に伴ってエンジン駆動力を低下させ、実効駆動力の急激な増加が抑制される。
ブレーキ解除条件が満たされない場合には、電動パーキングブレーキ22,24の作用力はそのまま保持されるが、ブレーキ解除条件が満たされた場合には、S3において、電動パーキングブレーキ22,24の作用力が漸減されて、解除される。
ケーブル26の張力は、予め定められた設定勾配で減少させられる。ブレーキ作用力が、張力の減少勾配に応じた勾配で減少させられるのであり、制動トルク、制動力が、ブレーキ作用力の減少勾配に応じた勾配で減少させられる。
また、ケーブル26の張力は、設定値(本実施例においては0である)以下になるまで減少させられる。S23,24において、ケーブル26に加えられる張力が設定値以下になると張力付与用モータ42が停止させられる。
ケーブル26の張力は、タイミングに達すると緩められるが、上述のパーキングブレーキ解除条件が満たされると同時にタイミングに達したとしたり、パーキングブレーキ解除条件が満たされてから設定時間が経過した後にタイミングに達したとしたりすること等ができる。
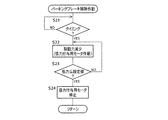
S51において、電動パーキングブレーキ22,24の作用力が自動で緩められたか否か、S52において、電動パーキングブレーキ22,24が解除された(ブレーキ作用力が0になった)か否かが判定される。いずれでもない場合には、S53において、通常のエンジン制御が行われる。例えば、S53aにおいて、アクセル操作部材72の開度が検出され、S53bにおいて、アクセル開度に応じた駆動トルクが得られるように、エンジン68が制御される。この通常のエンジン制御は、電動パーキングブレーキ22,24の作動中においても非作動中においても同様に行われる。
電動パーキングブレーキ22,24の作用力が減少させられた場合には、S54において、駆動トルクが減少側に変化させられる。本実施例においては、エンジン駆動力の変化勾配が制動力の減少勾配と同じ勾配だけ小さくされ、その小さくされた勾配でエンジン駆動力が減少側に変化するように、エンジン68が制御される。
ブレーキ作用力が減少させられる以前において、エンジン駆動力が一定で、実効駆動力が一定である場合には、エンジン駆動力が制動力の減少勾配と同じ勾配で減少させられる。また、エンジン駆動力が増加傾向にある場合には、それの増加勾配が制動力の減少勾配だけ小さくされ、その小さくされた増加勾配で変化させられる。
シフト位置がパーキングP、ニュートラルN、ドライブDからリバースRへ切り換えられた場合には、S56において、駆動トルクが予め定められた態様で回復され、シフト位置がパーキングP、ニュートラルN、リバースRからドライブDへ切り換えられた場合には、S57において、アクセル操作部材72の操作状態に応じた態様で回復される。電動パーキングブレーキ22,24の作動中におけるアクセル操作部材72の操作状態は記憶される。
なお、シフト位置の切り換えが行われなかった場合には、アクセル操作に応じた態様で回復される。
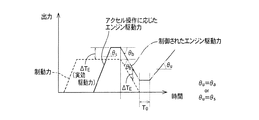
図7に示す場合においては、エンジン駆動力が制動力の減少勾配と同じ勾配で減少させられる。エンジン駆動力が制動力より大きくなり、一定の加速度で走行している場合に、電動パーキングブレーキ22,24の作動力が減少させられる場合に、エンジン駆動力が制動力の減少勾配と同じ勾配で減少させられるため、実効駆動力ΔTEを一定に保つことができ、加速度を一定に保つことができる。
また、その後、遅れ時間T0だけエンジン駆動力が保持された後に、増加させられる。エンジン駆動力が減少後、直ちに増加させられるのではなく、保持された後に増加させられるため、実効駆動力の急激な変化を抑制することができる。この場合の増加勾配は、予め定められた設定勾配θaとされる場合や、アクセル操作部材72の操作状態に基づいて決まる勾配θsとされる場合がある。
また、シフト位置がリバースRを表す位置に切り換えられた場合(S56)とドライブDを表す位置に切り換えられた場合(S57)とで、互いに異なる態様で、駆動トルクを変化させることは不可欠ではなく、同じ態様で変化させられるようにすることもできる。例えば、リバースRに切り換えられた場合もドライブDに切り換えられた場合も、運転者のアクセル操作部材72の操作状態に基づいて変化させたり、予め定められた態様で変化させたりすることができる。
さらに、シフト位置がリバースRを表す位置に切り換えられた場合とドライブDを表す位置に切り換えられた場合とのいずれにおいても駆動トルクが同じ時間だけ保持された後に増加させられるようにされていたが、駆動トルクを保持する時間を、アクセル操作部材の操作状態に基づいて可変とすることができる。例えば、アクセル操作部材72の開度の増加勾配が大きい場合は小さい場合より短くすることができる。また、駆動トルクを保持するのではなく、設定勾配以下の緩やかな勾配で増加させることができる。換言すれば、駆動トルクが減少側に変化させられた後、少なくとも2段階で増加側に変化させるのであり、緩やかな勾配で増加側に変化させた後に急な勾配で変化させる。本実施例においても、駆動トルクの急激な変化を抑制することができる。
また、上記実施例においては、ブレーキ作用力が設定勾配で減少させられる場合について説明したが、その時点における車両の状態で決まる勾配で減少させられるようにすることもできる。本実施例においても、駆動トルクが、そのブレーキ作用力の減少状態に応じて減少させられる。駆動トルクは、実効駆動力の変化が小さくなるように減少させたり、実効駆動力が運転者によるアクセル操作部材の操作状態に応じて増加させられるように減少させたりすることが望ましい。
そこで、図10に示すように、エンジン駆動力が小さくされた場合に、制動力が傾斜により車両に加えられる駆動力以上となるように、張力付与装置30を制御することができる。この場合には、ブレーキ作用力が、エンジン駆動力の減少分だけ増加させられる。
このように、制動力と駆動力との両方が加えられる場合において、エンジン駆動力が小さくされた場合に、車両が停止状態に保たれるように制動力が大きくされる。
さらに、上記実施例においては、制動力がケーブル26の張力により作動させられる電動パーキングブレーキ22,24とされたが、ブレーキシリンダの液圧により作動させられる液圧ブレーキとしたり、電動モータの押付力により作動させられる電動ブレーキとしたりすることができる。
また、上記実施例においては、駆動源がエンジン68であったが、駆動用の電動モータとしたり、エンジンと駆動用の電動モータとの両方を含むものとしたりすることもできる。
本発明は、前述の態様の他、当業者の知識に基づいて種々の変更、改良を施した態様で実施することができる。
Claims (5)
- 車両の車輪の回転を抑制するブレーキと、そのブレーキを、運転者によるブレーキ操作がなくても作動可能な自動ブレーキ作動装置とを含む自動ブレーキ装置と、
前記車両の駆動源と、その駆動源の駆動トルクを制御可能な駆動トルク制御装置とを含む駆動装置と
を含む車両制御装置であって、
前記駆動トルク制御装置が、前記ブレーキの作用力が小さくされた場合に、前記駆動トルクを、前記ブレーキの作用力が小さくされる以前より、減少側に変化させる駆動トルク減少側変化部を含むことを特徴とする車両制御装置。 - 運転者により操作可能なシフト操作部材の位置を検出するシフト位置検出装置を含むとともに、前記駆動トルク減少側変化部によって前記駆動トルクが減少側に変化させられた後に、前記駆動トルクを前記シフト位置検出装置により検出された位置に応じた態様で増加側に変化させる駆動トルク増加側変化部を含む請求項1に記載の車両制御装置。
- 前記駆動トルク増加側変化部が、前記シフト位置検出装置によって検出された位置が後退を表す位置である場合に、前記駆動トルクを予め定められた一律の態様で変化させる一律変化部を含む請求項2に記載の車両制御装置。
- 前記駆動トルク増加側変化部が、前記シフト位置検出装置によって検出された位置が前進を表す位置である場合に、運転者によるアクセル操作部材の操作状態に応じた態様で前記駆動トルクを変化させるアクセル操作対応変化部を含む請求項2または3に記載の車両制御装置。
- 運転者によるアクセル操作部材の操作状態を検出するアクセル操作状態検出装置を含むとともに、前記駆動トルク減少側変化部によって前記駆動トルクが減少側に変化させられた後に、前記アクセル操作状態検出装置によって検出された操作状態に応じて、前記駆動トルクを増加側に変化させるアクセル操作対応駆動トルク増加側変化部を含む請求項1に記載の車両制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004315533A JP4367316B2 (ja) | 2004-10-29 | 2004-10-29 | 車両制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004315533A JP4367316B2 (ja) | 2004-10-29 | 2004-10-29 | 車両制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006123762A true JP2006123762A (ja) | 2006-05-18 |
| JP4367316B2 JP4367316B2 (ja) | 2009-11-18 |
Family
ID=36718899
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004315533A Expired - Fee Related JP4367316B2 (ja) | 2004-10-29 | 2004-10-29 | 車両制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4367316B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009126352A (ja) * | 2007-11-22 | 2009-06-11 | Aisin Seiki Co Ltd | 車両の走行制御装置 |
| JP2009173085A (ja) * | 2008-01-22 | 2009-08-06 | Toyota Motor Corp | 車両用トルク制御装置 |
| JP2013132166A (ja) * | 2011-12-22 | 2013-07-04 | Hitachi Automotive Systems Ltd | 電動車両の制御装置 |
| JP2017226282A (ja) * | 2016-06-21 | 2017-12-28 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2020084961A (ja) * | 2018-11-30 | 2020-06-04 | ダイハツ工業株式会社 | 車両 |
-
2004
- 2004-10-29 JP JP2004315533A patent/JP4367316B2/ja not_active Expired - Fee Related
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009126352A (ja) * | 2007-11-22 | 2009-06-11 | Aisin Seiki Co Ltd | 車両の走行制御装置 |
| JP2009173085A (ja) * | 2008-01-22 | 2009-08-06 | Toyota Motor Corp | 車両用トルク制御装置 |
| JP2013132166A (ja) * | 2011-12-22 | 2013-07-04 | Hitachi Automotive Systems Ltd | 電動車両の制御装置 |
| JP2017226282A (ja) * | 2016-06-21 | 2017-12-28 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2020084961A (ja) * | 2018-11-30 | 2020-06-04 | ダイハツ工業株式会社 | 車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4367316B2 (ja) | 2009-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4127310B2 (ja) | 車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体 | |
| CN110461662B (zh) | 车辆用控制装置 | |
| JP6828580B2 (ja) | 車両の制御装置 | |
| CN103608228B (zh) | 用于使车辆加速的方法以及混合动力车辆 | |
| JP7234894B2 (ja) | ハイブリッド車両の駆動制御装置 | |
| US20200198602A1 (en) | Control device for vehicle and vehicle including control device | |
| WO2019171496A1 (ja) | レジャービークル | |
| JP2002221240A (ja) | アクチュエータの制御装置 | |
| KR101554806B1 (ko) | 전기 기계를 포함하는 차량을 위한 방법 | |
| CN110753649A (zh) | 用于根据可允许再生扭矩控制传递到电动或混合动力车辆的车轮的扭矩的方法 | |
| JP4367316B2 (ja) | 車両制御装置 | |
| JP4701081B2 (ja) | 自動車,自動車の発電機制御装置及び車両駆動装置 | |
| US10099748B2 (en) | Saddle-type vehicle | |
| JP2009121372A (ja) | 電動パーキングブレーキ装置 | |
| JP5256913B2 (ja) | アクセルペダル踏力制御装置 | |
| JP5945555B2 (ja) | 自動車及び自動車の制御方法 | |
| JP6582424B2 (ja) | 電子制御装置 | |
| JP4159527B2 (ja) | 車両用のエンジン停止制御装置 | |
| JP2009062898A (ja) | 車両走行制御装置 | |
| JP2018167656A (ja) | 車両用制御装置 | |
| JP3689953B2 (ja) | 電動車両用制動力保持装置 | |
| JP6187402B2 (ja) | 車両駆動ユニットの制御装置 | |
| JPH0920161A (ja) | 自動変速機の後退防止装置 | |
| EP2657488B1 (en) | Acceleration control system and vehicle | |
| JP2019026086A (ja) | 車両のヒルホールド制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081202 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090804 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090817 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4367316 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120904 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130904 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |