JP2006129948A - 送気装置 - Google Patents
送気装置 Download PDFInfo
- Publication number
- JP2006129948A JP2006129948A JP2004319747A JP2004319747A JP2006129948A JP 2006129948 A JP2006129948 A JP 2006129948A JP 2004319747 A JP2004319747 A JP 2004319747A JP 2004319747 A JP2004319747 A JP 2004319747A JP 2006129948 A JP2006129948 A JP 2006129948A
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- lumen
- abdominal
- air supply
- setting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 210000000683 abdominal cavity Anatomy 0.000 claims abstract description 73
- 238000001514 detection method Methods 0.000 claims abstract description 7
- 230000003187 abdominal effect Effects 0.000 description 162
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 132
- 229910002092 carbon dioxide Inorganic materials 0.000 description 66
- 239000001569 carbon dioxide Substances 0.000 description 66
- 238000005259 measurement Methods 0.000 description 15
- 238000003780 insertion Methods 0.000 description 13
- 230000037431 insertion Effects 0.000 description 13
- 238000010586 diagram Methods 0.000 description 11
- 210000002429 large intestine Anatomy 0.000 description 9
- 238000002357 laparoscopic surgery Methods 0.000 description 8
- 230000002093 peripheral effect Effects 0.000 description 8
- 230000008859 change Effects 0.000 description 7
- 230000006854 communication Effects 0.000 description 6
- 238000004891 communication Methods 0.000 description 6
- 230000006870 function Effects 0.000 description 5
- 238000005286 illumination Methods 0.000 description 5
- 230000010339 dilation Effects 0.000 description 4
- 210000000936 intestine Anatomy 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 230000000007 visual effect Effects 0.000 description 4
- 238000005452 bending Methods 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 238000001356 surgical procedure Methods 0.000 description 3
- 230000001225 therapeutic effect Effects 0.000 description 3
- 208000005646 Pneumoperitoneum Diseases 0.000 description 2
- 210000001015 abdomen Anatomy 0.000 description 2
- 230000004397 blinking Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000003745 diagnosis Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 210000002784 stomach Anatomy 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 239000004809 Teflon Substances 0.000 description 1
- 229920006362 Teflon® Polymers 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000007175 bidirectional communication Effects 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000000881 depressing effect Effects 0.000 description 1
- 238000001839 endoscopy Methods 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000002496 gastric effect Effects 0.000 description 1
- 238000001727 in vivo Methods 0.000 description 1
- 230000009545 invasion Effects 0.000 description 1
- 238000002350 laparotomy Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
Images












Landscapes
- Endoscopes (AREA)
Abstract
【解決手段】送気装置41は、所定の気体を供給する供給源と、この供給源から供給される所定の気体を患者の第1の体腔内へ供給する第1の管路と、供給源から供給される所定の気体を患者の第1の体腔内又は近傍の第2の体腔内へ供給する第2の管路と、供給源から第1及び第2の管路を介して患者に供給される気体のそれぞれの圧力を調整する電空比例弁93と、第1の管路の圧力を検出する第1圧力センサ95Aと、第2の管路の圧力を検出する第2圧力センサ95Bと、第1及び第2圧力センサ95A,95Bによる検出結果に基づき、第2の体腔内の圧力が、第1の体腔内の圧力よりも所定値高くなるように電空比例弁93を制御する制御部98と、を備えて構成されている。
【選択図】図5
Description
前記腹腔鏡下外科手術においては、患者の腹部に、例えば観察用の硬性内視鏡を体腔内に導く第1のトラカールと、治療処置を行う処置具を処置部位に導く第2のトラカールとが穿刺されて行われるようになっている。
また、胃や大腸などの管腔内の診断や処置を行う場合には、管腔内に挿入される細長で可撓性を有する挿入部を備えた軟性内視鏡と、この軟性内視鏡の処置具チャンネルを挿通して前記挿入部先端部のチャンネル開口から突出する処置具により治療処置を行う処置具とが用いられている。
このような場合に、生体に吸収され易い、例えば炭酸ガスを大腸に供給する装置であるエンドスコープ・CO2・レギュレータ(以下、ECRと称す)を使用することが考えられる。
図13に示すように、前記従来の腹腔鏡下外科手術システム150では、使用する周辺医療用機器の種類が多く、複数の医療用機器が数台のカート160,170に分けて搭載されている。また、これらのカート160,170は、ほぼ一ヶ所に集められて操作性が向上されている。
更に、前記第1カート160の第1光源164a又は、第2光源164bに、炭酸ガス(CO2)供給用チューブ192を介してECR190が接続されている。このECR190は、炭酸ガスボンベ(以下、CO2ボンベとも記載する)191に接続されている。
例えば、特開2000−139830号公報には、送気流量が設定値に達していない場合には、圧力調整部である電空比例弁(又は、電磁比例弁とも言う)の出力圧力が上昇するように制御信号を前記電空比例弁に供給して、生体内圧が設定値となるように送気流量を制御するようにした送気装置が開示されている。
また、特開2000−139823号公報には、空気を管腔に送気し、内部を一定の圧力に保つ送気装置が開示されている。
そこで、例えば、炭酸ガスを使用する、前記気腹器と前記ECRとを単純に一体化して構成した場合、装置が大型化し、コストも上昇する。また、気腹用送気と管腔用送気とでは、各送気圧がそれぞれ異なるために、それぞれに適した送気圧で炭酸ガスを送気しなければならない。
また、管腔臓器は、腹腔の内部にあるため、管腔内部の圧力は腹腔圧の影響を受ける。また、管腔内部へ送気を行って管腔が膨脹すると、腹腔内の容積が圧迫されるため、腹腔圧にも影響を受ける。このように、管腔内部の圧力と腹腔内の圧力は互いに影響を及ぼしあうために、この両者に送気を行って膨らませる場合、安定して膨らみを保つことが困難であった。
硬性内視鏡21の挿入部(不図示)は、第1トラカール14に挿通配置される。挿入部内には、被写体像を伝送するリレーレンズ(不図示)等で構成される観察光学系やライトガイド(不図示)等で構成される照明光学系を備えている。挿入部の基端部には、観察光学系によって伝送された光学像を観察する接眼部25が設けられている。接眼部25には、内視鏡用カメラ24が着脱自在に配設される。内視鏡用カメラ24の内部には、撮像素子(不図示)が備えられている。
尚、硬性内視鏡21と第1光源装置22とは、硬性内視鏡21の基端部側部から廷出するライトガイドケーブル26によって接続される。第1CCU23と内視鏡用カメラ24とは、撮像ケーブル27によって接続される。
軟性内視鏡31は、挿入部34と、操作部35と、ユニバーサルコード36とを備えて構成されている。操作部35には、送気・送水スイッチ35aや吸引スイッチ35b、図示しない湾曲部を湾曲動作させる湾曲操作ノブ37、図示しない処置具チャンネルに連通する処置具挿通口38が設けられている。ユニバーサルコード36の基端部には、光源コネクタ36aが設けられている。
第2CCU33は、軟性内視鏡31の挿入部34の図示しない先端部に設けられている撮像素子に結像して光電変換された電気信号を映像信号に変換し、例えばモニタ6や集中表示パネル7にその映像信号を出力する。このことによって、モニタ6又は集中表示パネル7の画面上に軟性内視鏡31でとらえた被写体の内視鏡画像が表示される。尚、符号39は、光源コネクタ36aに設けられている電気コネクタ36bと第2CCU33とを電気的に接続する電気ケーブルである。
送気装置41には、第1の供給口金である腹腔用供給口金41Aと、第2の供給口金である管腔用供給口金41Bとが設けられている。腹腔用供給口金41Aには、腹腔用チューブ45aの一端部が連結され、この腹腔用チューブ45aの他端部は、第3トラカール16に連結される。管腔用供給口金41Bには、管腔用チューブ45bの一端部が連結され、この管腔用チューブ45bの他端部は、アダプタ43の例えば側部に設けられているチューブ連結部43aに連結される。
送気装置41と炭酸ガスボンベ42とは、高圧ガス用チューブ46によって連結されている。送気装置41とフットスイッチ44とは、フットスイッチケーブル44bによって電気的に接続されている。前記チューブ45a、45bは、シリコンやテフロン(登録商標)で形成されている。
モニタ6の画面上には、第1CCU23又は第2CCU33から出力される映像信号を受けて、硬性内視鏡21又は軟性内視鏡31でとらえた被写体の内視鏡画像が表示されるようになっている。
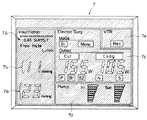
集中操作パネル8は、液晶ディスプレイ等の表示部と、この表示部の表示面上に一体的に設けられたタッチセンサ部とで構成されている。集中操作パネル8の表示部には、各内視鏡周辺装置の操作スイッチ等を設定画面として表示させる表示機能とともに、タッチセンサ部の所定領域を触れることによって操作スイッチを操作する操作機能とを有している。
カート9には、周辺装置である電気メス装置12、光源装置22、32、CCU23、33及び送気装置41と、システムコントローラ5と、集中表示パネル7と、集中操作パネル8と炭酸ガスボンベ42等が搭載される。
図2に示すように、前記集中操作パネル8には、送気装置41による腹腔用又は管腔用の気腹流量を調節するための設定操作ボタン8aと、前記電気メス装置(高周波燃焼装置)12の出力値を調節するための操作ボタン8bと、前記第1CCU23,第2CCU33の色調を調節するための操作ボタン8cと、モニタ6に表示する映像情報の表示切換えを指示するための操作ボタン8dと、前記VTRによる録画又は録画停止を指示するための操作ボタン8eと、前記第1光源装置22及び前記第2光源装置32の光量を調節するための操作ボタン8fとが設けられている。
図3に示すように、例えば、前記集中表示パネル7の表示画面上には、前記システムコントローラ5が通信制御している機器である送気装置41、電気メス装置12、送水・吸引ポンプ(図示せず)、VTR(図示せず)の機能に関する設定・動作状態がそれぞれの表示エリア7A(7a,7b),7c,7d,7eに表示されるようになっている。尚、前記表示エリア7Aは、前記送気装置41に関する設定、動作状態を表示するようになっており、管腔圧表示7a及び腹腔圧表示7bや炭酸ガス残量表示、流量表示等を表示している。
図4に示すように、前記送気装置41のフロントパネルには、操作情報を入力するための設定操作手段である設定操作部63及び表示部64が設けられている。これら設定操作部63及び表示部64は、炭酸ガスボンベ42に関する設定、操作及び表示のための供給源設定表示部41Cと、腹腔に関する設定、操作及び表示のための腹腔用設定表示部41Dと、管腔に関する設定、操作及び表示のための管腔用設定表示部41Eとに分割されている。また、前記腹腔用設定表示部41Dの下側には、気腹用送気ポートとしての腹腔用供給口金41Aが設けられている。更に、前記管腔用設定表示部41Eの下側には、管腔用送気ポートとしての管腔用供給口金41Bが設けられている。このような配置構成により、術者にとって前記送気装置41の操作がし易く、また各表示が見易いものとなっている。
前記腹腔用設定表示部41Dには、前記表示部64である腹腔圧表示部77a,腹腔圧設定表示部77b、腹腔流量表示部78a,腹腔流量設定表示部78b、送気ガス総量表示部79及び圧力警告灯84、前記設定操作部63である腹腔圧設定ボタン74a,74b、腹腔送気ガス流量設定ボタン75a,75b、腹腔指示ボタン82が設けられている。
前記管腔用設定表示部41Eには、前記表示部64である管腔圧表示部80a,管腔圧設定表示部80b、前記設定操作部63である管腔指示ボタン83、管腔圧設定ボタン81a,81bが設けられている。
前記電源スイッチ71は、送気装置41の電源をオン状態又はオフ状態に切り替えるスイッチである。この電源スイッチ71をオン状態にすることによってフットスイッチ44が操作可能な状態になる。前記送気開始ボタン72は、腹腔への炭酸ガスの供給開始を指示するボタンである。前記送気停止ボタン73は、腹腔への炭酸ガスの供給停止を指示するスイッチである。
ガス残量表示部76には、炭酸ガスボンベ42内の炭酸ガスの残量が表示される。
腹腔流量表示部78aには、後述の第1流量センサ96Aによって測定された測定結果が表示される。一方、腹腔流量設定表示部78bには、腹腔送気ガス流量設定ボタン75a、75bをボタン操作して設定された流量設定値が表示される。
管腔圧表示部80aには、後述の第2圧力センサ95Bによって測定された測定結果が表示される。一方、管腔圧設定表示部80bには、管腔圧設定ボタン81a、81bをボタン操作して設定された圧力設定値が表示される。
前記管腔指示ボタン83は、前記送気装置41による炭酸ガスの送気を管腔内に対して行う管腔送気モードを選択するための指示ボタンであり、ボタン操作することにより、前記管腔送気モードが選択されるようになっている。
前記圧力警告灯84は、例えば消灯状態から点滅表示状態又は赤色発光状態に変化して、腹腔圧が設定値より高くなったことを術者等に告知するようになっている。尚、管腔用の前記設定表示部41Eに、前記圧力警告灯84と同様の管腔圧力警告灯を設けても良い。
尚、腹腔圧又は管腔圧の設定、腹腔及び管腔の送気ガス流量の設定等は、前記集中操作パネル8によっても行える。また、前記集中表示パネル7に、腹腔圧表示部77a、腹腔圧設定表示部77b、腹腔流量表示部78a,腹腔流量設定表示部78b、管腔圧表示部80a,管腔圧設定表示部80b、送気ガス総量表示部79に表示される値の中から術者が予め指定した1つ又は複数の値を表示させるようにしてもよい。
図5に示すように送気装置41内には、供給圧センサ91、減圧器92、圧力調整手段である電空比例弁93、第1電磁弁94A及び第2電磁弁94B、第1及び第2の圧力検知手段である第1圧力センサ95A及び第2圧力センサ95B、第1流量センサ96A及び第2流量センサ96B、排出部である第1リリーフ弁97A及び第2リリーフ弁97B、制御手段である制御部98が主に設けられている。
前記電空比例弁93の下流側は2つに分岐しており、一方は第1電磁弁94A、第1圧力センサ95A、第1流量センサ96A、第1リリーフ弁97A、腹腔用供給口金41A、腹腔用チューブ45aで構成される第1の管路としての腹腔用流路であり、他方は、第2電磁弁94B、第2圧力センサ95B、第2流量センサ96B、第1リリーフ弁97A、管腔用供給口金41B、管腔用チューブ45bで構成される第2の管路としての管腔用流路である。
前記供給圧センサ91は、前記炭酸ガスボンベ42から供給された炭酸ガスの圧力を計測して制御部98に出力する。前記減圧器92は、前記高圧口金99を介して供給された炭酸ガスを所定の圧力に減圧する。
これにより、腹腔内又は管腔内の炭酸ガスが大気中に放出されて、腹腔圧又は管腔圧が減圧されるようになっている。
また、送気装置41には、メモリ101が設けられている。このメモリ101には、前回設定された設定値が記憶されるようになっている。
前記制御部98は、前記第1及び第2圧力センサ95A,95B、前記第1及び第2流量センサ96A,96Bの検知結果に基づき、前記電空比例弁93、前記第1及び第2電磁弁94A,94b、前記第1及び第2リリーフ弁97A,97Bを制御して腹腔内と管腔内とでそれぞれに適した圧力となるように適宜調節し、両者を一定の圧力に保つようにしている。
前記制御部98は、前記管腔圧が前記腹腔圧よりも所定値高くなるように前記腹腔圧及び前記管腔圧のうち、どちらか一方の圧力設定値を演算する演算部98aを有している。
更に、具体的に説明すると、腹腔圧設定表示部77b,管腔圧設定表示部80bに表示される各圧力設定値は、腹腔圧設定ボタン74a、74b,管腔圧設定ボタン81a、81bを操作することで、1mmHg単位で各々設定可能である。
更に具体的に説明すると、本実施例では、例えば、腹腔圧を3〜25mmHgの範囲で設定可能であり、これに対して管腔圧を最大30mmHgまで設定可能であるが、最小設定値が腹腔圧力+1mmHgとなる。
これにより、送気装置41は、管腔圧設定値が前記腹腔圧設定値を下限値としてこの下限値以上に設定されることで、前記管腔圧が前記腹腔圧よりも所定値高くなるようになる。
一方、逆に先ず管腔指示ボタン83を押下操作して管腔圧設定値を設定した後に、腹腔指示ボタン82を操作することにより、管腔圧設定値を基準として腹腔圧設定値を設定してもよい。
即ち、腹腔圧設定値は、入力される管腔圧設定値を上限値としてこの上限値より高くならないように制限される。
これにより、送気装置41は、腹腔圧設定値が前記管腔圧設定値を上限値としてこの上限値以下に設定されることで、前記管腔圧が前記腹腔圧よりも所定値高くなるようになる。
本実施例の送気装置41は、図1で説明したように外科手術システム1に用いられる。
先ず、電源スイッチ71をオン状態にすると、前記送気装置41は、腹腔圧表示部77aに腹腔圧が表示される状態になるとともに、管腔圧表示部80aに管腔圧が表示される状態となる。
尚、腹腔圧設定表示部77b、管腔圧設定表示部80b、腹腔流量設定表示部78b等の各設定表示部には、例えば集中操作パネル8で予め設定された設定値が表示されてもよい。
術者は、先ず腹腔指示ボタン82を押下操作して腹腔圧設定値を設定した後に、管腔指示ボタン83を操作して管腔圧設定値を設定する。
ここで、腹腔圧は、例えば、3〜25mmHgの範囲で、腹腔圧設定ボタン74a、74bを操作することにより1mmHg単位で設定可能である。
尚、上記は腹腔圧を基準とした場合であるが、管腔圧を基準とした場合、術者は、先ず管腔指示ボタン83を押下操作して管腔圧設定値を設定した後に、腹腔指示ボタン82を操作して管腔圧設定値を設定する。
前記送気装置41は、前記腹腔指示ボタン82及び前記送気開始ボタン72を操作することにより、腹腔用に適した圧力の炭酸ガスの供給を開始する。送気装置41は、腹腔圧が設定値になるように、腹腔圧の制御を継続する。
送気装置41では、炭酸ガスボンベ42のコックが開けられることで、高圧炭酸ガスが供給されて内部管路を介して減圧器92に導かれ、高圧炭酸ガスが所定の圧力に減圧されている。
先ず、制御部98は、腹腔指示ボタン82がボタン操作された腹腔送気モードオンの状態か否かを判断する(ステップS1)。腹腔送気モードがオンの場合、制御部98は、腹腔送気モードに入る。
ここで、管腔内への管路へは、前記第2電磁弁94Bが閉じているので、炭酸ガスが供給されない。従って、炭酸ガスは、腹腔内への管路へ導かれ、前記第1電磁弁94A、前記第1流量センサ96A、前記第1リリーフ弁97A、前記腹腔用供給口金41A、前記腹腔用チューブ45a、前記第3トラカール16の内部空間(図示せず)を通って腹腔内に導かれる。
前記制御部98は、腹腔圧の測定値が予め設定した設定圧に達したか否かを判断する(ステップS3)。
そして、制御部98は、再び第1電磁弁94Aを閉じ(ステップS6)、腹腔圧が設定圧に達するまでS1〜S6を繰り返す。
尚、制御部98に入力される第1圧力センサ95Aからの測定結果が腹腔圧設定表示部77bに表示されている設定値より所定の値、高くなった場合には、制御部98は制御信号を第1リリーフ弁97Aに対して出力する。このことによって、第1リリーフ弁97Aが開状態にされて、腹腔内の炭酸ガスを大気中に放出されて、腹腔圧が減圧される。このとき、前記制御信号の出力とともに、圧力警告灯84を例えば点滅表示状態にさせて、術者に腹腔圧が設定値より高くなったことを告知している。
ここで、腹腔内への管路へは、前記第1電磁弁94Aが閉じているので、腹腔には炭酸ガスが供給されない。従って、炭酸ガスは、管腔内への管路へ導かれ、前記第2電磁弁94B、前記第2流量センサ96B、前記第2リリーフ弁97B、前記管腔用供給口金41B、前記管腔用チューブ45b、前記アダプタ43(の内部空間:図示せず)、前記軟性内視鏡31の処置具チャンネル(図示せず)を通って管腔内に導かれる。
前記制御部98は、管腔圧が予め設定した設定圧に達したか否かを判断する(ステップS9)。尚、ここで、管腔圧設定値は、上述したようにその最小設定値が腹腔圧設定値より+1mmHgに設定されている。
そして、制御部98は、再び第2電磁弁94Bを閉じ(ステップS12)、管腔圧が予め設定した管腔設定圧に達するまでS7〜S12を繰り返す。
また、その間、腹腔モードがオンの場合には、ステップS2及びS3における、腹腔圧の測定と、設定値との比較を行い、腹腔圧が設定圧より下がった場合には、S4〜S6に示す送気を行う。
また、例えば、管腔圧は、図9に示すように制御されている。この例では、管腔圧設定値が30mmHgに設定されており、前記電空比例弁93の出力圧力が図10に示すように調節されている。
尚、本発明は、上記図5で説明した管路に限定されず、例えば、送気ポートが3つ以上の場合においても適用できる。
また、本発明は、上記図6のフローチャートで説明した制御に限定されず、腹腔圧、管腔圧を圧力設定値まで到達させる制御であればどんなフローチャートであってもよい。
上記実施例1は前記管腔圧が前記腹腔圧よりも高くなるようにその最小設定値が前記腹腔圧よりも+1mmHgとして前記腹腔圧及び前記管腔圧の各圧力設定値を各々設定できるように構成しているが、実施例2は前記管腔圧設定値が前記腹腔圧設定値よりも高くなる管腔拡張圧力(以下、管腔拡張圧と略記する)を設定できるように構成する。それ以外の構成は上記第1実施例と同様であるので説明を省略し、同一構成には同じ符号を付して説明する。
前記管腔拡張圧表示部80cには、管腔拡張圧設定値が表示される。
本実施例では、前記腹腔圧が設定可能となっており、前記管腔圧においては、前記管腔拡張圧を設定可能となっている。
即ち、管腔拡張圧設定値は、管腔外部よりもどのくらい高い圧力で管腔内部を膨らませるかを示す値であり、管腔の張りを表す値である。
本実施例では、前記腹腔圧設定値に前記管腔拡張圧設定値を加えた値を前記管腔圧設定値としている。
ここで、上記実施例1で説明したのと同様に、前記送気装置41の前記制御部98は、前記演算部98aの演算結果に基づき、管腔圧設定値を腹腔圧設定値より高く、即ち、「腹腔圧設定値+管腔拡張圧設定値」に設定可能としている。
これにより、送気装置41は、前記管腔圧が前記腹腔圧よりも所定値として管腔拡張圧設定値分高くなるようになる。
この管腔拡張圧設定値を設定するには、先ず前記腹腔指示ボタン82を押下操作して腹腔圧設定値を設定した後に、前記管腔指示ボタン83を操作して設定する。
実施例2の送気装置41は、上記実施例1で説明したのと同様に外科手術システム1に用いられる。
尚、腹腔圧設定表示部77b、管腔拡張圧表示部80c、腹腔流量設定表示部78b等の各設定表示部には、例えば集中操作パネル8で予め設定された設定値が表示されてもよい。
術者は、先ず腹腔指示ボタン82を押下操作して腹腔圧設定値を設定した後に、管腔指示ボタン83を操作して管腔拡張圧設定値を設定する。
ここで、腹腔圧は、上記実施例1で説明したのと同様に例えば、3〜25mmHgの範囲で、腹腔圧設定ボタン74a、74bを操作することにより1mmHg単位で設定可能である。
より具体的には、腹腔圧設定値を8mmHgとし、管腔拡張圧設定値を5mmHgとした場合、管腔圧設定値は8+5=13mmHgとなる。この場合、送気装置41は、腹腔圧を8mmHgに、管腔圧を13mmHgになるように送気を制御する。
これにより、送気装置41は、管腔拡張圧が高いほど、管腔が強く拡張されることとなり、より広い視野が得られる。
尚、術中、腹腔圧の設定が変更された場合には、その都度、「管腔圧設定値=腹腔圧設定値十管腔拡張圧設定値」となり、腹腔圧設定が変更されても管腔の張りが同様に維持される。
従って、実施例2の送気装置41は、上記実施例1と同様な効果を得ることに加え、腹腔圧の設定を変更した場合でも自動的に管腔圧の設定が変更され、常に同じ程度の管腔の張りを維持できる。
この場合、送気装置は、上記「高/中/低」の3段階の設定を図示しないボタンにより設定可能とし、「高」=10mmHg、「中」=5mmHg、「低」=1mmHgの管腔拡張圧と定義して上記制御を行うように構成する。
上記実施例1,2は前記管腔圧が前記腹腔圧よりも高くなるように術者が管腔の設定値を設定するように構成しているが、第3実施例は腹腔圧設定値を設定するのみで、管腔圧設定値を設定可能とするように構成する。それ以外の構成は上記第1実施例と同様であるので説明を省略し、同一構成には同じ符号を付して説明する。
本実施例では、圧力設定値として前記腹腔圧設定値のみが設定可能となっており、この腹腔圧設定値に初期値として+5mmHgを加えた値を前記管腔圧設定値としている。
これにより、送気装置41は、前記管腔圧が前記腹腔圧よりも所定値として+5mmHg高くなるようになる。
実施例3の送気装置41は、上記実施例1で説明したのと同様に外科手術システム1に用いられる。
このとき、腹腔圧設定表示部77b、腹腔流量設定表示部78b等の各設定表示部には、前記メモリ101に記憶されている前回設定された設定値が前記制御部98から読み出されて表示される。
尚、腹腔圧設定表示部77b、腹腔流量設定表示部78b等の各設定表示部には、例えば集中操作パネル8で予め設定された設定値が表示されてもよい。
これら各設定値が予め設定されていない場合において、術者は、腹腔圧設定ボタン74a、74bや腹腔送気ガス流量設定ボタン75a、75bを操作して腹腔圧及び流量設定値設定を行う。
ここで、腹腔圧は、上記実施例1で説明したのと同様に例えば、3〜25mmHgの範囲で、腹腔圧設定ボタン74a、74bを操作することにより1mmHg単位で設定可能である。
これにより、送気装置41は、腹腔圧設定値を設定するのみで管腔圧設定値が自動設定できる。
尚、術中、腹腔圧の設定が変更された場合には、その都度、管腔圧設定値=腹腔圧設定値十5mmHgとなり、腹腔圧設定が変更されても管腔の張りが同様に維持される。
従って、実施例3の送気装置41は、上記実施例2と同様な効果を得ることに加え、管腔圧を設定する手間が省け、操作が簡略化できる。
(付記項1)
所定の気体の供給源に接続された第1の管路を腹腔内に導入する第1の導入ステップと、
前記所定の気体の供給源に接続された第2の管路を管腔内に導入する第2の導入ステップと、
前記第2の管路を介して前記管腔内に注入する前記所定の気体の圧力を、前記第1、第2の管路を介して注入する前記所定の気体の圧力を制御する制御装置の操作部により、前記第1の管路を介して前記腹腔内に注入する前記所定の気体の圧力よりも高い圧力に設定する設定ステップと、
を有することを特徴とする送気圧制御方法。
2…第1内視鏡システム
3…第2内視鏡システム
4…送気システム
16…第3トラカール
21…硬性内視鏡
31…軟性内視鏡
41…送気装置
41A…腹腔用供給口金
41B…管腔用供給口金
42…炭酸ガスボンベ
44…フットスイッチ
45a…腹腔用チューブ
45b…管腔用チューブ
63…設定操作部
64…表示部
93…電空比例弁
94A…第1電磁弁
94B…第2電磁弁
95A…第1圧力センサ
95B…第2圧力センサ
96A…第1流量センサ
96B…第2流量センサ
97A…第1リリーフ弁
97B…第2リリーフ弁
98…制御部
98a…演算部
101…メモリ
代理人 弁理士 伊藤 進
Claims (3)
- 所定の気体を供給する供給源と、
前記供給源から供給される所定の気体を患者の第1の体腔内へ供給する第1の管路と、
前記供給源から供給される所定の気体を前記患者の前記第1の体腔内又は近傍の第2の体腔内へ供給する第2の管路と、
前記供給源から前記第1及び第2の管路を介して前記患者に供給される気体のそれぞれの圧力を調整する圧力調整手段と、
前記第1の管路の圧力を検出する第1の圧力検出手段と、
前記第2の管路の圧力を検出する第2の圧力検出手段と、
前記第1及び第2の圧力検出手段による検出結果に基づき、前記第2の体腔内の圧力が、前記第1の体腔内の圧力よりも所定値高くなるように前記圧力調整手段を制御する制御手段と、
を備えたことを特徴とする送気装置。 - 前記第1及び第2の体腔内の圧力設定値を入力するための設定操作手段を具備し、
前記制御手段は、前記第2の体腔内の圧力が前記第1の体腔内の圧力よりも所定値高くなるように、前記第1及び第2の体腔内の圧力のうち、少なくともいずれかの圧力設定値演算設定することを特徴とする請求項1に記載の送気装置。 - 前記第1の体腔内は、腹腔であり、
前記第2の体腔内は、管腔である
ことを特徴とする請求項1又は2に記載の送気装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004319747A JP4652771B2 (ja) | 2004-11-02 | 2004-11-02 | 送気装置 |
| US11/265,687 US20060129087A1 (en) | 2004-03-31 | 2005-11-02 | Method and apparatus for supplying predetermined gas into body cavities of a patient |
| US12/650,861 US7981072B2 (en) | 2004-03-31 | 2009-12-31 | Method and apparatus for supplying predetermined gas into body cavities of a patient |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004319747A JP4652771B2 (ja) | 2004-11-02 | 2004-11-02 | 送気装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006129948A true JP2006129948A (ja) | 2006-05-25 |
| JP4652771B2 JP4652771B2 (ja) | 2011-03-16 |
Family
ID=36723989
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004319747A Expired - Fee Related JP4652771B2 (ja) | 2004-03-31 | 2004-11-02 | 送気装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4652771B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015009113A (ja) * | 2013-07-02 | 2015-01-19 | オリンパスメディカルシステムズ株式会社 | 気腹装置 |
| JP2015198820A (ja) * | 2014-04-09 | 2015-11-12 | 富士フイルム株式会社 | 送気システム及び送気装置 |
| CN112137662A (zh) * | 2019-06-28 | 2020-12-29 | 深圳迈瑞生物医疗电子股份有限公司 | 气腹机 |
| CN114173698A (zh) * | 2019-04-08 | 2022-03-11 | 奥瑞斯健康公司 | 用于伴随规程的系统、方法和工作流程 |
| WO2025120697A1 (ja) * | 2023-12-04 | 2025-06-12 | 晴洋 井上 | 圧力制御装置、圧力制御システム、および、圧力制御方法 |
| US12616539B2 (en) | 2022-05-25 | 2026-05-05 | Auris Health, Inc. | Systems, methods, and workflows for concomitant procedures |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06209901A (ja) * | 1993-01-13 | 1994-08-02 | Olympus Optical Co Ltd | 気腹装置 |
| JPH11188005A (ja) * | 1997-12-26 | 1999-07-13 | Olympus Optical Co Ltd | 送気装置 |
-
2004
- 2004-11-02 JP JP2004319747A patent/JP4652771B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06209901A (ja) * | 1993-01-13 | 1994-08-02 | Olympus Optical Co Ltd | 気腹装置 |
| JPH11188005A (ja) * | 1997-12-26 | 1999-07-13 | Olympus Optical Co Ltd | 送気装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015009113A (ja) * | 2013-07-02 | 2015-01-19 | オリンパスメディカルシステムズ株式会社 | 気腹装置 |
| JP2015198820A (ja) * | 2014-04-09 | 2015-11-12 | 富士フイルム株式会社 | 送気システム及び送気装置 |
| CN114173698A (zh) * | 2019-04-08 | 2022-03-11 | 奥瑞斯健康公司 | 用于伴随规程的系统、方法和工作流程 |
| JP2022527834A (ja) * | 2019-04-08 | 2022-06-06 | オーリス ヘルス インコーポレイテッド | 付随する処置のためのシステム、方法、及びワークフロー |
| JP2025000994A (ja) * | 2019-04-08 | 2025-01-07 | オーリス ヘルス インコーポレイテッド | 付随する処置のためのシステム、方法、及びワークフロー |
| CN112137662A (zh) * | 2019-06-28 | 2020-12-29 | 深圳迈瑞生物医疗电子股份有限公司 | 气腹机 |
| US12616539B2 (en) | 2022-05-25 | 2026-05-05 | Auris Health, Inc. | Systems, methods, and workflows for concomitant procedures |
| WO2025120697A1 (ja) * | 2023-12-04 | 2025-06-12 | 晴洋 井上 | 圧力制御装置、圧力制御システム、および、圧力制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4652771B2 (ja) | 2011-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4573556B2 (ja) | 送気装置 | |
| JP4526313B2 (ja) | 送気システム | |
| JP4573555B2 (ja) | 内視鏡外科手術システム | |
| JP4624707B2 (ja) | 内視鏡外科手術システム | |
| JP4573554B2 (ja) | 内視鏡外科手術システム | |
| US7981072B2 (en) | Method and apparatus for supplying predetermined gas into body cavities of a patient | |
| JP2006061214A (ja) | 手術システム | |
| JP4716689B2 (ja) | 内視鏡システム | |
| US20060047184A1 (en) | Endoscope having auto-insufflation and exsufflation | |
| JPWO2007080971A1 (ja) | 内視鏡用オーバーチューブ | |
| JP2006167122A (ja) | 送気システム | |
| JP5165338B2 (ja) | 内視鏡システム | |
| JP4643246B2 (ja) | 腹腔鏡下外科手術システム | |
| JP4727224B2 (ja) | 送気装置 | |
| JP2005110978A (ja) | 送気装置 | |
| JP4652771B2 (ja) | 送気装置 | |
| JP5592826B2 (ja) | 気腹装置 | |
| JP4885444B2 (ja) | 送気装置 | |
| JP4668585B2 (ja) | 送気装置 | |
| JP2006174882A (ja) | 送気装置 | |
| JP2006026313A (ja) | 送気システム | |
| JP4776914B2 (ja) | 送気装置 | |
| JP6192600B2 (ja) | 送気装置及び送気システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070911 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100907 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101207 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101216 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4652771 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131224 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |