JP2006151122A - 車両のレーン走行支援装置 - Google Patents
車両のレーン走行支援装置 Download PDFInfo
- Publication number
- JP2006151122A JP2006151122A JP2004342900A JP2004342900A JP2006151122A JP 2006151122 A JP2006151122 A JP 2006151122A JP 2004342900 A JP2004342900 A JP 2004342900A JP 2004342900 A JP2004342900 A JP 2004342900A JP 2006151122 A JP2006151122 A JP 2006151122A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- lane
- state
- travel
- yaw angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images



Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Traffic Control Systems (AREA)
Abstract
【課題】 撮像手段の精度に大きく依存することなく、しかも道路曲率に依存することなく、適切に車両のレーン走行支援を行なう。
【解決手段】 車両運動モデル及び道路モデルに基づき、走行レーン検出手段の検出結果と車両の操舵状態及び走行状態に応じて、車両の横方向位置を含む状態量を推定し、目標状態量との比較結果に応じてレーン走行支援を行なう。特に、ヨーレイト検出手段によって検出されたヨーレイトのフィルタ値と、画像からヨー角検出手段によって検出されたヨー角のフィルタ値によって、道路曲率に依存することなく状態量を推定する。
【選択図】 図3
【解決手段】 車両運動モデル及び道路モデルに基づき、走行レーン検出手段の検出結果と車両の操舵状態及び走行状態に応じて、車両の横方向位置を含む状態量を推定し、目標状態量との比較結果に応じてレーン走行支援を行なう。特に、ヨーレイト検出手段によって検出されたヨーレイトのフィルタ値と、画像からヨー角検出手段によって検出されたヨー角のフィルタ値によって、道路曲率に依存することなく状態量を推定する。
【選択図】 図3
Description
本発明は、車両のレーン走行支援装置に関し、特に、運転者のステアリングホイール操作に応じて作動すると共に車両の路面走行状態に応じて操舵状態を制御し得る操舵制御手段と、撮像手段によって路面を連続して撮像した画像から走行レーンを検出する走行レーン検出手段を備え、これらによって、走行レーン内を車両が走行するように支援する車両のレーン走行支援装置に係る。
車両のレーン走行支援装置としては、運転者のステアリングホイール操作に応じて作動すると共に車両の路面走行状態に応じて操舵状態を制御し得る操舵制御手段を備え、これを制御して車両が走行レーン内を走行するように支援するレーンキープアシストが基本であるが、更に、走行支援を越えて、運転者の操作とは無関係に自動的に操舵制御を行ない、車両が走行レーン内の走行を維持し得るように制御する装置も知られている。
例えば、下記の特許文献1には、自ら走行路を探索しながら、その走行路上に最適な目標経路を設定して、車両がその目標経路上を走行するように支援する車両の走行制御を行なわせることを目的とし、以下のように構成された自動走行装置が提案されている。即ち、撮像装置により車両の進行方向の領域を撮像した画像にもとづいて道路エッジを認識することにより自ら走行可能領域を探索しながら、その走行可能領域内に適切な目標経路を設定し、そのときの車両の走行状態にしたがって車両をその目標経路に合流させるための最適な制御目標量を求めて、その制御目標量に応じて車両の走行制御を行なわせる旨記載されている。
あるいは、下記の特許文献2には、例えばプラント、工場等の床面に安全通路を表示するため前記通路両側に標記された白線を誘導帯として使用し、特に狭隘な場所でのコーナリングが容易になし得ることを目的として、安全通路の限界を示すために床面に設けられた白線等をそのまま誘導帯として使用し、走行車の現在の方位とコーナ部の角度とから操舵量を算出してコーナリングを行うように構成された走行車の誘導装置が提案されている。
更に、下記の特許文献3には、運転者がハンドル操作しなくても前方の走行レーン上を外れることなく走行することができる自動車用自動操舵装置が提案されている。この特許文献3には、自動車の右側下方向の進路を撮影する撮影手段と、この撮影手段にて撮影した道路の中から隣接する走行レーンの境界を示すラインを認識する認識手段と、この認識手段にて認識したラインの基準位置からの距離を検出する距離検出手段と、この距離検出手段にて検出した距離に応じた舵角制御信号を発生する舵角制御手段と、この舵角制御手段からの舵角制御信号を受けて車両の進行方向を変化させる舵角駆動手段とを備え、前記舵角制御信号による舵角制御手段の作動にて前記距離検出手段にて検出される距離を所定値に保持せしめるようにする旨記載されている。
上記の特許文献に記載の装置によれば、何れも画像によって検出した車両等の走行レーンに沿ってコーナリングを行なうことが可能とされている。この場合において、現実的な対応としては、必ずしも運転者の操作と無関係に自動的に操舵することは必要ではなく、例えば運転者によるステアリングホイールの操作に対し、車両が走行レーンの中央を維持するように操舵トルクを付加することによって、ステアリングホイールの操作負荷を軽減し、巡航運転を支援することができる。
このようなレーン走行支援装置においては、カメラで撮像した画像から路面上の走行レーンを適切且つ安定的に検出することが重要となる。通常、路面上には、走行レーン(車線)の境界を識別するレーン境界線をはじめ種々の目的に応じて標示線(レーンマーク)が塗装されており、実線のみならず破線のレーンマークや、白色あるいは黄色というように異なる色彩のレーンマークが混在し、更には、これらが複合されたものも存在する。特に、破線のレーンマークや剥がれが生じたレーンマークには空白部が存在するので、短い実線部を高精度で検出する必要が生ずる。従って、レーン走行支援装置に供する撮像手段としては、遠方までレーンマークを確実に検出し得るように、高性能の前方監視カメラが必要とされる。
ところで、近時の車両には、車両前方あるいは後方の近傍の確認や駐車支援用に前方監視カメラや後方監視カメラが装着されているものがある。しかし、これら既設の前方監視カメラや後方監視カメラは近傍の画像を確保し得るに留まり、遠方の画像は不鮮明となるので、遠方のレーンマークに対しては上記の空白部で検出不能となる。従って、このようなレーンマークの検出に既設のカメラが転用されることはなく、別途、高性能の前方監視カメラが採用され高価な装置となっていた。
この点に鑑み、本願発明者は、操舵状態を制御し得る操舵制御手段と、撮像した画像から走行レーンを検出する走行レーン検出手段を備え、これらによって、車両が走行レーン内を走行するように支援する車両のレーン走行支援装置において、撮像手段の精度に大きく依存することなく、既設の安価なカメラを転用しても、車両のレーン走行支援を適切に行ない得るようにしたレーン走行支援装置を提案している(例えば、特願2003−369750)。これによって、破線のレーンマークや剥がれが生じたレーンマークのように空白部が存在する場合でも、これを含む走行レーン内における車両の横方向位置を精度よく推定することができる。
然し乍ら、上記のレーン走行支援装置においては、後述するモデル式に道路曲率(ρ)が含まれている。このため、道路曲率(ρ)が検出されている場合には問題ないが、道路曲率が不明で推定演算等が行われる場合には、状態量の推定に誤差を生ずることになるので、道路曲率(ρ)に依存しない構成とすることが望まれる。
そこで、本発明は、上記の車両のレーン走行支援装置において、撮像手段の精度に大きく依存することなく、しかも道路曲率に依存することなく、適切に車両のレーン走行支援を行ない得るレーン走行支援装置を提供することを課題とする。
上記の課題を達成するため、本発明は、運転者のステアリングホイール操作に応じて作動すると共に車両の路面走行状態に応じて操舵状態を制御し得る操舵制御手段と、撮像手段によって路面を連続して撮像した画像から走行レーンを検出する走行レーン検出手段を備え、該走行レーン検出手段が検出した走行レーン内を前記車両が走行するように前記操舵制御手段を制御して、前記車両の前記走行レーン内の走行を支援する車両のレーン走行支援装置において、前記車両のヨーレイトを検出するヨーレイト検出手段と、前記撮像手段によって撮像した画像から前記車両のヨー角を検出するヨー角検出手段と、前記走行レーン検出手段の検出結果並びに前記車両の操舵状態及び走行状態に応じて推定した、前記走行レーン内における前記車両の横方向位置及び横方向位置変動速度、前記ヨー角及び前記ヨーレイトを所定の同一周波数特性のローパスフィルタによってフィルタ処理したフィルタリングヨー角及びフィルタリングヨーレイト、並びに前記ヨー角及び前記ヨーレイトに基づき、車両運動モデル及び道路モデルに従い、ヨー角及び横方向位置変動速度を含む状態量を推定する車両状態推定手段と、前記車両の操舵状態及び走行状態に基づき前記車両に対する目標状態量を設定する目標状態量設定手段とを備え、該目標状態量設定手段が設定した目標状態量と前記車両状態推定手段が推定した状態量の比較結果に応じて前記車両の前記走行レーン内の走行を支援するように構成したものである。
そして、前記車両状態推定手段による、前記走行レーン内における前記車両の横方向位置の推定結果に基づき、運転者に対して警報する警報手段及び前記操舵制御手段による操舵制御を修正する修正操舵手段の、少なくとも一方を備えたものとするとよい。前記操舵制御手段は、例えば電動パワーステアリングシステムを備えたものとするとよい。尚、前記車両状態推定手段は、前記撮像手段によって撮像した画像から、前記走行レーン検出手段が前記走行レーンを標示するレーンマークの連続線部を検出したときの検出値に基づいて、当該レーンマークの空白部を含む前記走行レーン内における前記車両の横方向位置を、前記車両運動モデル及び道路モデルに基づき推定するように構成することができる。
前記車両状態推定手段における車両の操舵状態及び走行状態を表す指標としては、例えば操舵角及びヨーレイトがあり、前記目標状態量設定手段における車両の操舵状態及び走行状態を表す指標としては、例えば操舵角及び車体速度がある。そして、前記状態量を表す指標として、前記走行レーン内における前記車両の横方向位置、及び該横方向位置に基づいて演算した横方向位置変動速度は、夫々、前記走行レーン内における前記車両の横方向位置たるレーン位置、及びその微分値であるレーン位置変動速度とすることができる。
前記車両状態推定手段は、請求項2に記載のように、前記横方向位置変動速度を演算するオブザーバ演算式から、前記フィルタリングヨーレイトに前記車両の速度を乗じた値を差し引いて積分した成分に、前記フィルタリングヨー角に前記車両の速度を乗じた値を加算して前記状態量の横方向位置変動速度とするように構成することができる。
例えば、同じ周波数特性のローパスフィルタによってフィルタ処理されたフィルタリングヨー角Gs(ψ)とフィルタリングヨーレイトGs(γ)を用いることとし、横方向位置変動速度(レーン位置変動速度)を演算するオブザーバ演算式から、フィルタリングヨーレイトGs(γ)に車両の速度vxを乗じた値を差し引いて積分した成分[∫{a22・dye+a23・ψe+a24・γ−Gs(γ)・vx+L2・(dy−dye)}・dt]に、フィルタリングヨー角Gs(ψ)に車両の速度vxを乗じた値を加算する下記の状態量推定オブザーバ演算式に従い、横方向位置変動速度の推定値dyeを求めることができる。尚、dyは前記走行レーン内における車両の横方向移動速度であって、前記走行レーン検出手段によって検出されるレーン位置yの時間微分値であり、γは前記ヨーレイト検出手段によって検出されるヨーレイト、ψは前記ヨー角検出手段によって検出されるヨー角、L2はオブザーバゲインである。a22乃至a24は係数であり、これについては後述する。
dye=∫{a22・dye+a23・ψe+a24・γ−Gs(γ)・vx+L2・(dy−dye)}・dt+Gs(ψ)・vx
dye=∫{a22・dye+a23・ψe+a24・γ−Gs(γ)・vx+L2・(dy−dye)}・dt+Gs(ψ)・vx
前記車両状態推定手段は、請求項3に記載のように、前記ヨー角を演算するオブザーバ演算式から、前記フィルタリングヨーレイトを差し引いて積分した成分に、前記フィルタリングヨー角を加算して前記状態量のヨー角とするように構成することができる。例えば、同じ周波数特性のローパスフィルタによってフィルタ処理されたフィルタリングヨー角Gs(ψ)とフィルタリングヨーレイトGs(γ)を用いることとし、ヨー角を演算するオブザーバ演算式から、フィルタリングヨーレイトGs(γ)を差し引いて積分した成分[∫{γ−Gs(γ)+L3・(ψ−ψe )}]に、フィルタリングヨー角Gs(ψ)を加算する下記の状態量推定オブザーバ演算式に従い、ヨー角の推定値ψeを求めることができる。尚、γは前記ヨーレイト検出手段によって検出されるヨーレイト、ψは前記ヨー角検出手段によって検出されるヨー角、L3はオブザーバゲインである。
ψe =∫{γ−Gs(γ)+L3・(ψ−ψe )}・dt+Gs(ψ)
ψe =∫{γ−Gs(γ)+L3・(ψ−ψe )}・dt+Gs(ψ)
本発明は上述のように構成されているので以下の効果を奏する。即ち、請求項1に記載のように構成された車両のレーン走行支援装置においては、車両状態推定手段によって車両モデル及び道路モデルに基づく状態量の推定を行い、レーンマークの空白部を含む走行レーン内における車両の横方向位置を適切に推定することができるので、撮像手段の精度に大きく依存することなく、既設の安価なカメラによっても、車両のレーン走行支援を適切に行なうことができる。また、前方監視カメラに限らず後方監視カメラを用いることもできる。特に、ヨーレイト検出手段によって検出されたヨーレイトのフィルタ値であるフィルタリングヨーレイトと、前記画像からヨー角検出手段によって検出されたヨー角のフィルタ値であるフィルタリングヨー角によって、道路曲率に依存することなく状態量を推定することができるので、適切に車両のレーン走行支援を行なうことができる。
前記車両状態推定手段は、例えば請求項2又は3に記載のように構成することができ、フィルタリングヨーレイト及びフィルタリングヨー角によって、道路曲率に依存することなく前記状態量を推定することができるので、道路曲率が未知でも状態量の推定が可能となり、レーン空白区間においても遅れが生ずることなく、適切に車両のレーン走行支援を行なうことができる。
以下、本発明の望ましい実施形態を図面を参照して説明する。図1は本発明の一実施形態に係る車両のレーン走行支援装置の構成を示すもので、車両前方(図1の上方)に、撮像手段として例えばccdカメラで構成された前方監視用のカメラCMfが配置されると共に、車両後方にも後方監視用のカメラCMrが配置されているが、何れか一方のカメラが設けられておればよい。また、本実施形態の操舵制御手段として電動パワーステアリングシステムEPSを備えている。このような電動パワーステアリングシステムEPSは既に市販されており、運転者によるステアリングホイールSWの操作によってステアリングシャフトに作用する操舵トルクを、操舵トルクセンサTSによって検出し、この検出操舵トルクの値に応じてEPSモータ(図1では図示省略)を制御し、減速ギヤ及びラックアンドピニオン(図示せず)を介して車両前方の車輪(図1では全車輪を代表してWHで表す)を操舵し、運転者のステアリング操作力(ハンドル操作力)を軽減するものである。
本実施形態では、図1に示すように、画像処理用の電子制御ユニットECU1及び操舵制御用の電子制御ユニットECU2を備え、両者が通信バスを介して接続されている。電子制御ユニットECU1にはカメラCMf(及びCMr)が接続されており、画像信号が電子制御ユニットECU1に入力されるように構成されている。一方、電子制御ユニットECU2には、入力側に上記の操舵トルクセンサTSのほか、車両前方の車輪WHの操舵角を検出する操舵角センサSS、車体速度を検出する車体速度センサVS、車両のヨーレイトを検出するヨーレイトセンサYS、及びEPSモータの回転角を検出する回転角センサRS等が接続されると共に、出力側にEPSモータが接続されている。尚、車体速度センサVSに代えて、各車輪の車輪速度を検出する車輪速度センサ(図示せず)を備えたものとし、検出車輪速度に基づき車体速度を推定することとしてもよい。
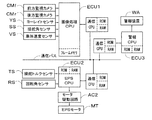
図2は本発明のシステム構成を示すもので、画像処理システム(図2の上方)及び操舵制御システム(図2の下方)が通信バスを介して接続されている。本実施形態の画像処理システムは、画像処理用のCPU、フレームメモリ等を備えた電子制御ユニットECU1に、前方監視カメラCMf及び後方方監視カメラCMrが接続されると共に、電子制御ユニットECU2を介してヨーレイトセンサYS、操舵角センサSS及び車体速度センサVSが接続されている。また、本実施形態の操舵制御システムは、電動パワーステアリング制御用のCPU、ROM及びRAMを備えた電子制御ユニットECU2に、操舵トルクセンサTS及び回転角センサRSが接続されると共に、モータ駆動回路AC2を介してEPSモータMTが接続されている。更に、本実施形態では、警報用の電子制御ユニットECU3(図1では図示省略)を介して、警報表示や音声警報を出力する警報装置WAが接続されている。
これらの電子制御ユニットECU1乃至ECU3は夫々、通信用のCPU、ROM及びRAMを備えた通信ユニットを介して通信バスに接続されており、各制御システムに必要な情報を他の制御システムから送信することができる。更に、図示は省略するが、この通信バスに、アクティブステアリングシステム、ブレーキ制御システム、スロットル制御システム等を接続し、各システム間で互いのシステム情報を共有することができるように構成することとしてもよい。尚、図1に示すように、電子制御ユニットECU1(又はECU2)には操作スイッチOSが接続されており、走行支援制御は運転者による操作スイッチOSの操作によって開始されるように構成されている。
上記のように構成されたレーン走行支援装置において、レーン走行支援(レーンキープアシスト)制御部は、図3の制御ブロック図に示すように構成されており、カメラCMf(又はCMr)によって撮像された画像情報が図2の電子制御ユニットECU1にて画像処理されて走行レーンが検出される。この電子制御ユニットECU1には、レーン検出手段たるレーン認識演算部M1が構成されており、ここで、走行レーン内における車両の横方向位置y(レーン位置)及び走行レーンに対するヨー角ψが演算されると共に、検出状態Rlが判別される。この検出状態Rlは、画像認識結果のレーン検出状態を表すファクターで、例えば、走行レーンが検出された状態が「1」で、未検出の状態が「0」とされる。これにより、レーンマークの連続線部が検出されたときにのみ走行レーン内における車両の横方向位置を推定するように構成し、あるいは、レーンマークの連続線部が検出されたときにのみ走行レーン内における車両の横方向位置を推定結果に反映するように構成することができる。尚、画像処理による走行レーンの検出については前掲の特許文献1に記載された方法のほか、公知の何れの方法でもよい。
上記のレーン認識演算部M1による演算結果とヨーレイトセンサYS及び操舵角センサSSの検出信号を用いた車両モデルと道路モデルに基づき、車両状態推定手段たる状態推定演算部M2にて、レーン位置y、レーン位置変動速度dy(走行レーン内における車両の横方向移動速度でレーン位置yの時間微分値)、ヨー角ψ、及びヨーレイトγをファクターとする現在の車両の状態量Xが推定演算される。即ち、車両の状態量をX、状態量出力をY、道路モデルの入力をUとすると、X=[y,dy,ψ,γ]T、Y=[y,dy,ψ,γ]T、U=[δf,ρ]Tと表すことができる(「T」は転置を表す)。尚、δfは操舵角センサSSで検出される操舵角で、ρは走行路の道路曲率で、例えば前述のカメラ画像から推定演算される。そして、状態量推定値を、Xに対し「e」を付加してXeとし、オブザーバゲインをLとすると、以下の状態方程式が成り立ち、状態量出力YはY=C・Xeとなる。
dXe/dt=A・Xe+B・U+Rl・L・(X−Xe)
dXe/dt=A・Xe+B・U+Rl・L・(X−Xe)
尚、上記の状態方程式におけるモデル定数A、B及びCは以下に示すとおりである。
A=[a11 a12 a13 a14 ; a21 a22 a23 a24 ; a31 a32 a33 a34 ; a41 a42 a43 a44]
B=[b11 b12 ; b21 b22 ; b31 b32 ; b41 b42]
C=[1 0 0 0 ; 0 1 0 0 ; 0 0 1 0 ; 0 0 0 1]
A=[a11 a12 a13 a14 ; a21 a22 a23 a24 ; a31 a32 a33 a34 ; a41 a42 a43 a44]
B=[b11 b12 ; b21 b22 ; b31 b32 ; b41 b42]
C=[1 0 0 0 ; 0 1 0 0 ; 0 0 1 0 ; 0 0 0 1]
上記において、aa1等は状態方程式の係数であり、一般的であるが、以下に列記する。a11=0,a12=1,a13=0,a14=0,a21=0,a22=−(Cf+Cr)/(m・vx),a23=(Cf+Cr)/m,a24=(−lf・Cf+lr・Cr)/(m・vx),a31=0,a32=0,a33=0,a34=1,a41=0,a42=(−lf・Cf+lr・Cr)/(Iz・vx),a43=(lf・Cf−lr・Cr)/Iz,a44=−(lf2・Cf+lr2・Cr)/(Iz・vx),b11=0, b21=Cf/(m・Rsg),b31=0,b41=lf・Cf/(Iz・Rsg),b12=0,b22=−vx2,b32=−vx,b42=0である。ここで、m は車両重量、vx は車速、lf は前輪の車軸と重心間の距離、lrは後輪の車軸と重心間の距離、Izはヨー慣性モーメント、Rsgはステアリングギヤ比、Cfは前輪のコーナリングパワー、Crは後輪のコーナリングパワーである。
上記のようにカメラ画像から道路曲率ρを推定演算し得る場合において、上記の状態量Xを構成するレーン位置y、レーン位置変動速度dy、ヨー角ψ及びヨーレイトγの各々を推定する状態量推定オブザーバ演算式を表すと、以下のようになる。尚、一般的には推定値に対し特殊記号が冠せられるが、ここでは、これに代えて末尾に「e」を付加して推定値であることを示している。
先ず、レーン位置yの状態量を推定するオブザーバ演算式は以下のとおりであり(オブザーバゲインをL1とする)、これによりレーン位置の推定値yeが求められる。
ye =∫{dye+L1・(y−ye)}・dt (1)
ye =∫{dye+L1・(y−ye)}・dt (1)
次に、レーン位置変動速度dyの状態量を推定するオブザーバ演算式は以下のとおりで(オブザーバゲインをL2とする)、これによりレーン位置変動速度の推定値dyeが求められるが、この(2)式には道路曲率ρが含まれている。
dye=∫{a22・dye+a23・ψe+a24・γ−ρ・vx2+L2・(dy−dye)}・dt (2)
dye=∫{a22・dye+a23・ψe+a24・γ−ρ・vx2+L2・(dy−dye)}・dt (2)
また、ヨー角ψの状態量を推定するオブザーバ演算式は以下のとおりであり(オブザーバゲインをL3とする)、これによりヨー角の推定値ψeが求められるが、この(3)式にも道路曲率ρが含まれている。
ψe =∫{(γ−ρ・vx+L3・(ψ−ψe )}・dt (3)
ψe =∫{(γ−ρ・vx+L3・(ψ−ψe )}・dt (3)
そして、ヨーレイトγの状態量を推定するオブザーバ演算式は以下のとおりであり(オブザーバゲインをL4とする)、これによりヨーレイトの推定値γeが求められる。
γe =∫{a42・dy+a43・ψ+a44・γ+L4・(γ−γe)}・dt (4)
γe =∫{a42・dy+a43・ψ+a44・γ+L4・(γ−γe)}・dt (4)
一方、操舵角センサSSで検出された操舵角δf、及び車体速度センサVSで検出された車体速度(車速)vx等に基づき、目標状態量演算部M3にて以下の4ファクターから成る目標状態量が演算される。先ず、走行レーン内における車両の横方向位置(レーン位置)に対する目標レーン位置ytが、走行レーンの中心(レーン境界線間の中心)を起点として、yt=0に設定される。そして、目標レーン位置変動速度dytに関し、車両が横振れすることなく走行レーンの中心に沿って移動するように、dyt=0に設定される。また、目標ヨー角ψtがψt=C・ρに設定される。尚、このCは道路曲率から目標ヨー角への変換定数で、ρは道路曲率である。そして、車体速度(車速)vxと道路曲率ρに基づき、目標ヨーレイトγtがγt = vx・ρとして設定される。
而して、目標状態量演算部M3の演算結果(目標状態量)と、状態推定演算部M2の演算結果(現在の状態量)との差が演算され、この差に基づき、フィードバック制御演算部M4にてトルク指令値が演算される。即ち、フィードバック制御演算部M4においては、上記の目標状態量を表す4ファクターの目標値(tを付加)と推定値(eを付加)における各々の差にゲインK1乃至K4によって重み付けがされ、これらの総和が下記のように目標回転角(目標ステアリング角)δswtとして設定される。
δswt = K1・(yt−ye)+K2・(dyt−dye)+K3・(ψt−ψe)+K4・(γt−γe)
δswt = K1・(yt−ye)+K2・(dyt−dye)+K3・(ψt−ψe)+K4・(γt−γe)
そして、上記の目標回転角(目標ステアリング角)δswtと、回転角センサRSで検出される実回転角(実ステアリング角)δswとの差に応じて、付加ステアリングトルク指令値TaddがTadd=K0・(δswt−sw)として演算される。この付加ステアリングトルク指令値Taddは操舵制御用の電子制御ユニットECU2(図2)に送信され、電動パワーステアリング制御部M6(図3)にて、上記トルク指令値Taddが通常のパワーステアリング制御量に加算されて、電動パワーステアリングシステムEPSが制御され、修正操舵が行われる。
而して、レーンマークの連続線部が検出されたときにのみ走行レーン内における車両の横方向位置が推定結果に反映されるので、レーンマークの連続線部が検出されたときの検出値に基づいて、レーンマークの空白部を含む走行レーン内における車両の横方向位置を適切に推定することができる。更に、必要に応じ、上記トルク指令値Taddが警報出力部M6に供給され、トルク指令値Taddの大きさ、換言すれば走行レーンの中心からの車両の位置に応じて、走行レーンからの逸脱のおそれを表す警報が出力され、運転者への注意喚起が行われる。尚、トルク指令値Taddを用いることなく、走行レーン内における車両の横方向位置の推定結果(状態推定演算部M2の演算結果)に応じて警報を行うこととしてもよい。
上記においては、車両走行路の道路曲率ρに基づいて状態量を推定することとしているので、道路曲率ρが不明の状態で推定演算が行われる場合には、特に上記の(2)式及び(3)式のように道路曲率ρが含まれている状態量の推定時に誤差を生ずることになる。そこで、本実施形態においては、以下のように、道路曲率ρの代わりに、画像から計測したヨー角ψを所定の周波数特性のローパスフィルタによってフィルタ処理した値、即ちフィルタリングヨー角Gs(ψ)と、ヨーレイトセンサYS出力を同じ周波数特性のローパスフィルタによってフィルタ処理した値、即ちフィルタリングヨーレイトGs(γ)とを用いて、以下の(2’)式及び(3’)式のように状態量を推定することとしている。尚、上記の(1)式及び(4)式は本実施形態においても同様であるが、以下、順次記載する。
先ず、前述と同様の状態量推定オブザーバ演算式(1)によりレーン位置の推定値yeが求められる。
ye =∫{dye+L1・(y−ye)}・dt (1)
ye =∫{dye+L1・(y−ye)}・dt (1)
次に、前述の状態量推定オブザーバ演算式(2)に対応する下記のオブザーバ演算式(2’)によって、レーン位置変動速度の推定値dyeが求められるが、ここでは、同じ周波数特性のローパスフィルタによってフィルタ処理されたフィルタリングヨー角Gs(ψ)とフィルタリングヨーレイトGs(γ)が用いられている。従って、道路曲率ρは存在しない。
dye=∫{a22・dye+a23・ψe+a24・γ−Gs(γ)・vx+L2・(dy−dye)}・dt+Gs(ψ)・vx (2’)
dye=∫{a22・dye+a23・ψe+a24・γ−Gs(γ)・vx+L2・(dy−dye)}・dt+Gs(ψ)・vx (2’)
また、前述の状態量推定オブザーバ演算式(3)に対応する下記のオブザーバ演算式(3’)によって、ヨー角の推定値ψeが求められるが、ここでも、同じ周波数特性のローパスフィルタによってフィルタ処理されたフィルタリングヨー角Gs(ψ)とフィルタリングヨーレイトGs(γ)が用いられており、道路曲率ρは存在しない。
ψe =∫{γ−Gs(γ)+L3・(ψ−ψe )}・dt+Gs(ψ) (3’)
ψe =∫{γ−Gs(γ)+L3・(ψ−ψe )}・dt+Gs(ψ) (3’)
そして、前述と同様の状態量推定オブザーバ演算式(4)によりヨーレイトの推定値γeが求められる。
γe =∫{a42・dye+a43・ψe+a44・γ+L4・(γ−γe)}・dt (4)
γe =∫{a42・dye+a43・ψe+a44・γ+L4・(γ−γe)}・dt (4)
図4は、その上段に示すように道路曲率が変化した場合の実験結果を示すもので、本実施形態におけるヨー角の推定値ψe(太い実線で表す)と、従来のオブザーバによるヨー角の推定値(太い破線で表す)とを対比して示している。尚、細い実線はヨー角計測値(実測値)、細い破線はフィルタ処理後のヨー角計測値を表している。図4において、カーブに進入した時点(約37秒の時点)から、従来技術によるヨー角推定値はヨー角計測値からの誤差が大きくなっているのに対し、本実施形態によるヨー角推定値はヨー角計測値に対し大きな誤差が生じていないことが分かる。而して、フィルタリングヨー角Gs(ψ)とフィルタリングヨーレイトGs(γ)を用いて演算されたヨー角の推定値ψeは、仮に道路曲率ρが未知でも推定が可能となり、レーン空白区間においても遅れが生ずることなく適切な制御が可能となる。
尚、上記の実施形態においては、曲率項に対しフィルタ処理を行っているため、道路曲率ρが前述のフィルタの周波数特性(カットオフ周波数)よりも速く変動するような厳しい状況では、誤差が大きくなるおそれがある。この場合には、更に、曲率変化の高周波成分(ρ−Gs(ρ))も考慮し、道路曲率ρも併用することとし、以下のように補正するとよい。即ち、ヨー角の推定値ψeに関しては、その微分値dψe/dtが下記(2”)式の関係となるように演算すれば、フィルタの周波数特性よりも速く道路曲率が変動するような場合にも適切に対応することができる。
dψe/dt =∫{(γ−Gs(γ))−(ρ−Gs(ρ))・vx+L3・(ψ−ψe )}・dt+Gs(ψ) (2”)
dψe/dt =∫{(γ−Gs(γ))−(ρ−Gs(ρ))・vx+L3・(ψ−ψe )}・dt+Gs(ψ) (2”)
同様に、レーン位置変動速度の推定値dyeについても、その微分値d(dye)/dtが下記(3”)式の関係となるように演算すれば、フィルタの周波数特性よりも速く道路曲率が変動する場合にも適切に対応し得る。
d(dye)/dt =∫{a22・dye+a23・ψe+a24・γ−Gs(γ)・vx−(ρ−Gs(ρ))・vx2+L2・(dy−dye)}・dt+Gs(ψ)・vx (3”)
d(dye)/dt =∫{a22・dye+a23・ψe+a24・γ−Gs(γ)・vx−(ρ−Gs(ρ))・vx2+L2・(dy−dye)}・dt+Gs(ψ)・vx (3”)
而して、信頼可能な道路曲率が判明している場合には、敢えて道路曲率を排除する必要はなく、前述のオブザーバ演算式(2’)及び(3’)を基本とした上記の(2”)及び(3”)式を用いればよく、これにより道路曲率の変化が激しい状況下でも適切に対応することができる。
SW ステアリングホイール
WH 車輪
EPS 電動パワーステアリングシステム
CMf 前方監視カメラ
CMr 後方監視カメラ
TS 操舵トルクセンサ
SS 車輪舵角センサ
RS 回転角センサ
YS ヨーレイトセンサ
VS 車体速度センサ
OS 操作スイッチ
WH 車輪
EPS 電動パワーステアリングシステム
CMf 前方監視カメラ
CMr 後方監視カメラ
TS 操舵トルクセンサ
SS 車輪舵角センサ
RS 回転角センサ
YS ヨーレイトセンサ
VS 車体速度センサ
OS 操作スイッチ
Claims (3)
- 運転者のステアリングホイール操作に応じて作動すると共に車両の路面走行状態に応じて操舵状態を制御し得る操舵制御手段と、撮像手段によって路面を連続して撮像した画像から走行レーンを検出する走行レーン検出手段を備え、該走行レーン検出手段が検出した走行レーン内を前記車両が走行するように前記操舵制御手段を制御して、前記車両の前記走行レーン内の走行を支援する車両のレーン走行支援装置において、前記車両のヨーレイトを検出するヨーレイト検出手段と、前記撮像手段によって撮像した画像から前記車両のヨー角を検出するヨー角検出手段と、前記走行レーン検出手段の検出結果並びに前記車両の操舵状態及び走行状態に応じて推定した、前記走行レーン内における前記車両の横方向位置及び横方向位置変動速度、前記ヨー角及び前記ヨーレイトを所定の同一周波数特性のローパスフィルタによってフィルタ処理したフィルタリングヨー角及びフィルタリングヨーレイト、並びに前記ヨー角及び前記ヨーレイトに基づき、車両運動モデル及び道路モデルに従い、ヨー角及び横方向位置変動速度を含む状態量を推定する車両状態推定手段と、前記車両の操舵状態及び走行状態に基づき前記車両に対する目標状態量を設定する目標状態量設定手段とを備え、該目標状態量設定手段が設定した目標状態量と前記車両状態推定手段が推定した状態量の比較結果に応じて前記車両の前記走行レーン内の走行を支援することを特徴とする車両のレーン走行支援装置。
- 前記車両状態推定手段は、前記横方向位置変動速度を演算するオブザーバ演算式から、前記フィルタリングヨーレイトに前記車両の速度を乗じた値を差し引いて積分した成分に、前記フィルタリングヨー角に前記車両の速度を乗じた値を加算して前記状態量の横方向位置変動速度とするように構成したことを特徴とする請求項1記載の車両のレーン走行支援装置。
- 前記車両状態推定手段は、前記ヨー角を演算するオブザーバ演算式から、前記フィルタリングヨーレイトを差し引いて積分した成分に、前記フィルタリングヨー角を加算して前記状態量のヨー角とするように構成したことを特徴とする請求項1記載の車両のレーン走行支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004342900A JP2006151122A (ja) | 2004-11-26 | 2004-11-26 | 車両のレーン走行支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004342900A JP2006151122A (ja) | 2004-11-26 | 2004-11-26 | 車両のレーン走行支援装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006151122A true JP2006151122A (ja) | 2006-06-15 |
Family
ID=36629931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004342900A Withdrawn JP2006151122A (ja) | 2004-11-26 | 2004-11-26 | 車両のレーン走行支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006151122A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8526681B2 (en) | 2007-07-17 | 2013-09-03 | Toyota Jidosha Kabushiki Kaisha | On-vehicle image processing device for vehicular control |
| US9227635B1 (en) * | 2014-09-25 | 2016-01-05 | Nissan North America, Inc. | Method and system of assisting a driver of a vehicle |
-
2004
- 2004-11-26 JP JP2004342900A patent/JP2006151122A/ja not_active Withdrawn
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8526681B2 (en) | 2007-07-17 | 2013-09-03 | Toyota Jidosha Kabushiki Kaisha | On-vehicle image processing device for vehicular control |
| US9227635B1 (en) * | 2014-09-25 | 2016-01-05 | Nissan North America, Inc. | Method and system of assisting a driver of a vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104943747B (zh) | 车辆的防止偏离车道控制装置 | |
| US7447578B2 (en) | Steering control apparatus and method for automotive vehicle | |
| JP4291741B2 (ja) | 車線逸脱警報装置 | |
| JP6055525B1 (ja) | 車両の走行制御装置 | |
| JP6076394B2 (ja) | 車両用操舵装置および車両操舵制御方法 | |
| EP3306271A1 (en) | Vehicle stop position setting device and method | |
| KR20060049706A (ko) | 차량의 레인주행지원장치 | |
| JP6327701B2 (ja) | 車両の車線逸脱防止制御装置 | |
| JP6137979B2 (ja) | 車線逸脱防止支援装置 | |
| JPWO2014064805A1 (ja) | 車両用走行支援装置 | |
| KR20190038077A (ko) | 차선 유지 제어장치 및 제어방법 | |
| CN110893851A (zh) | 用于在道路偏离事件中辅助驾驶员的方法和系统 | |
| US20160031321A1 (en) | Predicted arrival point presentation device and computer readable medium | |
| JP2001097234A (ja) | 車両の操舵装置 | |
| JP5790401B2 (ja) | 車両用走行支援装置 | |
| JP4419560B2 (ja) | 車両のレーン走行支援装置 | |
| JP2006236238A (ja) | 車両のレーン走行支援装置 | |
| JP4696539B2 (ja) | 車両の走行支援装置 | |
| JP2006031553A (ja) | 車両のレーン走行支援装置 | |
| JP4576914B2 (ja) | 車両のレーン走行支援装置 | |
| JP2024510676A (ja) | 車両を操作するための方法、コンピュータプログラム、制御システム、および車両 | |
| JP6317972B2 (ja) | 車両の車線逸脱防止制御装置 | |
| US8532878B2 (en) | Method and device for detecting and compensating for a transverse inclination of a roadway on which a vehicle is traveling | |
| JP4325363B2 (ja) | 車両のレーン走行支援装置 | |
| JP6599706B2 (ja) | 操舵支援制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071022 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20090914 |