JP2006200501A - 内燃機関の空燃比制御装置 - Google Patents
内燃機関の空燃比制御装置 Download PDFInfo
- Publication number
- JP2006200501A JP2006200501A JP2005015306A JP2005015306A JP2006200501A JP 2006200501 A JP2006200501 A JP 2006200501A JP 2005015306 A JP2005015306 A JP 2005015306A JP 2005015306 A JP2005015306 A JP 2005015306A JP 2006200501 A JP2006200501 A JP 2006200501A
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- fuel ratio
- downstream
- air
- intake air
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
【課題】 より精度良く空燃比制御を実施できる内燃機関の空燃比制御装置を提供する。
【解決手段】 排気通路に設けられた排気浄化手段と、排気ガスの空燃比を検出する、もしくは酸素濃度を検出するセンサであって上記排気浄化手段よりも上流側に設けられた上流側センサと、排気ガスの酸素濃度を検出するセンサであって上記排気浄化手段よりも下流側に設けられた下流側センサとを具備し、上記上流側センサの出力に基づく空燃比制御が上記下流側センサの出力に基づいて補正される内燃機関の空燃比制御装置において、上記下流側センサの温度Tsが所定温度Tc以上であるときに、上記内燃機関において吸入空気量Gaが予め定めた基準吸入空気量α未満の運転が行われていると判定された場合には、同判定後、予め定めた待ち時間Wtcの間、上記下流側センサの出力に基づいた補正が制限されることを特徴とする内燃機関の空燃比制御装置が提供される。
【選択図】 図4
【解決手段】 排気通路に設けられた排気浄化手段と、排気ガスの空燃比を検出する、もしくは酸素濃度を検出するセンサであって上記排気浄化手段よりも上流側に設けられた上流側センサと、排気ガスの酸素濃度を検出するセンサであって上記排気浄化手段よりも下流側に設けられた下流側センサとを具備し、上記上流側センサの出力に基づく空燃比制御が上記下流側センサの出力に基づいて補正される内燃機関の空燃比制御装置において、上記下流側センサの温度Tsが所定温度Tc以上であるときに、上記内燃機関において吸入空気量Gaが予め定めた基準吸入空気量α未満の運転が行われていると判定された場合には、同判定後、予め定めた待ち時間Wtcの間、上記下流側センサの出力に基づいた補正が制限されることを特徴とする内燃機関の空燃比制御装置が提供される。
【選択図】 図4
Description
本発明は内燃機関の空燃比制御装置に関する。
空燃比の値を検出する空燃比センサもしくは残留酸素濃度に基づいて空燃比が理論空燃比よりもリッチかリーンかを感知するための酸素センサ(O2センサ)を内燃機関の排気通路に設け、そのセンサ出力に基づいて燃料噴射量を制御して空燃比を制御する、空燃比のフィードバック制御が公知である。
そして、このような空燃比のフィードバック制御を行う場合に、上記空燃比センサもしくは酸素センサを排気浄化手段である触媒の上流側に設けると共に別の酸素センサを上記触媒の下流側に設け、触媒上流側のセンサの出力に基づくメインフィードバック制御に加えて、触媒下流側の酸素センサの出力に基づくサブフィードバック制御を実施するようにしたものが知られている(例えば、特許文献1および2参照)。
すなわち、一般に触媒の下流側では排気ガスは十分に攪拌されているので、下流側の酸素センサの出力は、上流側のセンサの出力よりも緩やかに変化すると共に混合気全体のリッチ/リーンの傾向を示すようになる。このため、上記サブフィードバック制御を行って、触媒上流側センサの出力に基づくメインフィードバック制御において決定されたフィードバック値を触媒下流側の酸素センサの出力に基づいて補正することにより、空燃比制御の精度の向上を図ることができるのである。
ところで、上記酸素センサはセンサ素子の内外面での酸素濃度差に応じた起電力を発生するものであり、通常、上記センサ素子の内面側に大気があり、外面側を排気ガスが流通するようになっている。そして、上記センサ素子とセンサ本体との取付部分はシールされ、上記内面側の大気が排気ガスのある外面側へと漏れ出さないようにされている。
ところが実際には、上記センサ素子とセンサ本体との取付部分を完全にシールすることは難しく、大気が排気ガス側へと漏洩する場合がある。大気が排気ガス側に漏洩すると、酸素センサの出力は実際の空燃比よりもリーン側にずれることになり、空燃比制御を精度良く実施することが困難になる。
本発明は、このような問題に鑑みてなされたものであり、その目的は、上記のような排気浄化手段の上流側のセンサの出力に基づく空燃比制御が排気浄化手段の下流側の酸素センサの出力に基づいて補正される内燃機関の空燃比制御装置において、より精度良く空燃比制御を実施することのできる内燃機関の空燃比制御装置を提供することである。
本発明は、上記課題を解決するための手段として、特許請求の範囲の各請求項に記載された内燃機関の空燃比制御装置を提供する。
請求項1に記載の発明は、内燃機関の排気通路に設けられた排気浄化手段と、上記排気通路を流通する排気ガスの空燃比を検出する、もしくは酸素濃度を検出するセンサであって、上記排気浄化手段よりも上流側に設けられた上流側センサと、上記排気通路を流通する排気ガスの酸素濃度を検出するセンサであって、上記排気浄化手段よりも下流側に設けられた下流側センサと、を具備し、上記上流側センサの出力に基づく空燃比制御が上記下流側センサの出力に基づいて補正される、内燃機関の空燃比制御装置において、上記下流側センサの温度が所定温度以上であるときに、上記内燃機関において吸入空気量が予め定めた基準吸入空気量未満の運転が行われていると判定された場合には、同判定後、上記基準吸入空気量未満の運転が継続される予め定めた待ち時間の間、上記下流側センサの出力に基づいた補正が制限されることを特徴とする内燃機関の空燃比制御装置を提供する。
上記のような上流側センサの出力に基づく空燃比制御が下流側センサの出力に基づいて補正される内燃機関の空燃比制御装置において上記下流側センサとして用いられる酸素センサは、センサ素子の内外面での酸素濃度差に応じた起電力を発生するものであり、上記センサ素子の一方の側に大気があり、他方の側を排気ガスが流通するようにされている。そして、上記センサ素子とセンサ本体との取付部分はシールされ、上記一方の側の大気が排気ガスのある側へと漏れ出さないようにされている。ところが実際には、上記センサ素子とセンサ本体との取付部分を完全にシールすることは難しく、大気が排気ガス側へと漏洩する場合がある。大気が排気ガス側に漏洩すると、酸素センサの出力は実際の空燃比よりもリーン側にずれることになり、空燃比制御を精度良く実施することが困難になる。
そして、この大気の排気側への漏洩による酸素センサ出力への影響は、酸素センサの温度が高い場合や、内燃機関の吸入空気量が少なくその結果排気ガス量が少ない場合に大きくなるため、特にこのような場合に空燃比制御の精度が低下する場合があった。
これに対し、請求項1に記載の発明では、上記酸素センサである下流側センサの温度が所定温度以上であるときに、上記吸入空気量が予め定めた基準吸入空気量未満の運転が行われていると判定された場合には、同判定後、上記基準吸入空気量未満の運転が継続される予め定めた待ち時間の間、上記下流側センサの出力に基づいた補正が制限されるようになっている。つまり、このようにすることによって、下流側センサの出力の精度が低下することが特に懸念される場合において同下流側センサの出力に基づいた補正が制限される。この結果、請求項1に記載の発明によれば、より精度良く空燃比制御を実施することが可能となる。
請求項2に記載の発明は、内燃機関の排気通路に設けられた排気浄化手段と、上記排気通路を流通する排気ガスの空燃比を検出する、もしくは酸素濃度を検出するセンサであって、上記排気浄化手段よりも上流側に設けられた上流側センサと、上記排気通路を流通する排気ガスの酸素濃度を検出するセンサであって、上記排気浄化手段よりも下流側に設けられた下流側センサと、を具備し、上記上流側センサの出力に基づく空燃比制御が上記下流側センサの出力に基づいて補正される、内燃機関の空燃比制御装置において、上記補正は、上記下流側センサの出力に基づいて更新される学習値に基づいて行われる第一補正と、同第一補正を補足するように上記下流側センサの出力に基づいて行われる第二補正とを含んでいて、上記下流側センサの温度が所定温度以上であるときに、上記内燃機関において吸入空気量が予め定めた基準吸入空気量未満の運転が行われていると判定された場合には、同判定後、上記基準吸入空気量未満の運転が継続される予め定めた待ち時間の間、上記学習値の更新が禁止されると共に、上記第二補正が制限もしくは禁止されることを特徴とする内燃機関の空燃比制御装置を提供する。
請求項2に記載の発明によれば、下流側センサの出力の精度が低下することが特に懸念される場合において上記学習値の更新が禁止されると共に、上記第二補正が制限もしくは禁止されるので、請求項1に記載の発明と同様、より精度良く空燃比制御を実施することが可能となる。
請求項3に記載の発明では請求項1または2に記載の発明において、上記基準吸入空気量が、上記下流側センサの劣化度合が高いほど大きくされるようになっている。
上記下流側センサにおける排気側への大気の漏洩は、同下流側センサの劣化度合が高いほど生じ易くなる。このため、請求項3に記載の発明のように、上記補正の制限などを実施するか否かの判定基準として用いる上記基準吸入空気量を、上記下流側センサの劣化度合が高いほど大きくすることによって、空燃比制御の精度の向上をより確実に図ることができる。
以上のように、各請求項に記載の発明は、排気通路に設けられた排気浄化手段の上流側のセンサの出力に基づく空燃比制御が排気浄化手段の下流側の酸素センサの出力に基づいて補正される内燃機関の空燃比制御装置において、より精度良く空燃比制御を実施することを可能にするという共通の効果を奏する。
以下、図面を参照して、本発明の実施形態について詳細に説明する。なお、図面において、同一または類似の構成要素には共通の参照番号を付す。
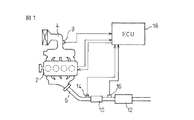
図1は、本発明の一実施形態の空燃比制御装置を適用した内燃機関の全体構成を示す説明図である。図1において、2は機関(エンジン)本体、4は吸気通路を構成する吸気管、6は排気通路を構成する排気管をそれぞれ示す。図1に示されているように、吸気管4には吸入空気量を検出するエアフローメータ8が設けられている。また、排気管6によって構成される排気通路には、排気ガスを浄化するための触媒が直列に二つ設けられている。これらの触媒、すなわち上流側触媒10と下流側触媒12は、それぞれが排気浄化手段を構成している。つまり本実施形態では排気通路に二つの排気浄化手段が設けられている。
そして、上記排気通路の上記上流側触媒10の上流側には排気ガスの空燃比の値を検出する空燃比センサが上流側センサ14として設けられている。また、上記排気通路の上記上流側触媒10の下流側(より詳細には、上記上流側触媒10と下流側触媒12の間)には排気ガスの酸素濃度を検出し排気ガスの空燃比が理論空燃比よりもリッチかリーンかを感知するための酸素センサが下流側センサ16として設けられている。
なお、本実施形態では上流側センサ14として空燃比センサが用いられたが、他の実施形態では上記下流側センサ16として用いられているような酸素センサを用いても良い。また、本実施形態では、下流側センサ16は上流側触媒10と下流側触媒12との間に設けられたが、他の実施形態では上記排気通路の下流側触媒12の下流側に設けられても良い。
更に、上述したように本実施形態では排気通路に二つの排気浄化手段(上流側触媒10および下流側触媒12)が設けられているが、他の実施形態においては排気通路に排気浄化手段が一つだけ設けられ、それよりも上流側および下流側に上流側センサおよび下流側センサがそれぞれ設けられても良い。あるいは、排気浄化手段が三つ以上設けられても良く、この場合、上記下流側センサは少なくとも一つの排気浄化手段よりも下流側に設けられる。
電子制御ユニット(ECU)18は、CPU(中央演算装置)、RAM(ランダムアクセスメモリ)、ROM(リードオンリメモリ)、入出力ポートを双方向バスで接続した公知の形式のディジタルコンピュータからなり、内燃機関の制御のために設けられている各種センサ(上述したエアーフローメータ8など)や作動装置と信号をやり取りして内燃機関を制御するようになっている。
特に、本実施形態においては、図1に示したように上流側センサ14および下流側センサ16がECU18に接続されており、これらセンサからの出力に基づいて燃料噴射量等を決定し、空燃比を目標空燃比に制御するフィードバック制御が行われるようになっている。より詳細には、本実施形態においては、上記上流側センサ14の出力に基づくメインフィードバック制御に加えて、上記下流側センサ16の出力に基づくサブフィードバック制御が実施されるようになっている。換言すれば、本実施形態においては、上記上流側センサ14の出力に基づく空燃比制御が上記下流側センサ16の出力に基づいて補正されるようになっている。
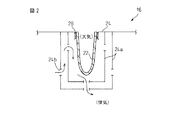
次に図2を参照して、本実施形態において下流側センサ16として用いられている酸素センサについて説明する。図2は、この酸素センサの概略構成を断面で示した説明図である。本実施形態において下流側センサ16として用いられている酸素センサは、センサ素子22の内外面での酸素濃度差に応じた起電力を発生するという公知のものである。図2に示されているように、上記センサ素子22の内面側が大気となり、外面側が排気ガスとなるようにされている。また、上記センサ素子22を覆うようにセンサ本体24のカバー部24aが設けられているが、カバー部24aには開口部24bが複数設けられており、上記センサ素子22の外面側を排気ガスが流通するようにされている(実線矢印は排気ガスの流通経路の一例を示す)。
上記センサ素子22はセラミック製であり、上記センサ本体24は金属製である。上記センサ素子22とセンサ本体24との取付部分にはシール部材26が用いられ、上記内面側の大気が排気ガスのある外面側へと漏れ出さないようにシールされている。
ところが実際には、上記センサ素子22とセンサ本体24との取付部分を完全にシールすることは難しく、大気が排気ガス側へと漏洩する場合がある。大気が排気ガス側に漏洩すると、酸素センサの出力は実際の空燃比よりもリーン側にずれることになり、空燃比制御を精度良く実施することが困難になってしまう。
そして、上記のような大気の排気側への漏洩による酸素センサ出力への影響は、酸素センサの温度が高い場合に大きくなることがわかっている。これは、セラミック製のセンサ素子22と金属製のセンサ本体24との熱膨張率が異なるためにセンサが高温になったときに漏洩量が増大するためであると考えられる。また、上記大気の漏洩による酸素センサ出力への影響は、内燃機関の吸入空気量が少なくその結果排気ガス量の少ない場合にも大きくなることがわかっている。
図3は、同一の酸素センサについて、酸素センサの温度が比較的低く且つ吸入空気量が比較的多い場合の酸素センサの出力(実線で図示)と、酸素センサの温度が比較的高く且つ吸入空気量が比較的少ない場合の酸素センサの出力(点線で図示)とを比較した場合の一例を示している。この図から、酸素センサの温度が比較的低く且つ吸入空気量が比較的多い場合の酸素センサの出力を基準にすると、酸素センサの温度が比較的高く且つ吸入空気量が比較的少ない場合には、空燃比が実際よりもリーン側にあるように判定されることがわかる。
そして、以上のようなことから、従来、下流側センサである酸素センサの温度が高く、吸入空気量が少ない場合(すなわち、例えば吸入空気量が多くなる高負荷運転がある程度継続されて酸素センサの温度が高くなった後に吸入空気量が少なくなる低負荷運転に移行した場合など)に特に空燃比制御の精度が低下するという問題があった。そこで、本実施形態においては、上述した空燃比制御の下流側センサ16の出力に基づく補正に関して以下で説明するような特別な制御を行い、より精度良く空燃比制御を実施できるようにしている。
この制御は、一口で言えば、上記下流側センサ16の温度が所定温度以上であるときに、吸入空気量が予め定めた基準吸入空気量未満である運転が行われていると判定された場合には、同判定後、上記基準吸入空気量未満の運転が継続される予め定めた待ち時間の間、上記下流側センサ16の出力に基づいた補正を制限するようにするというものである。なお、以下で説明するように、本実施形態において上記補正は、上記下流側センサ16の出力に基づいて更新される学習値に基づいて行われる第一補正と、同第一補正を補足するように上記下流側センサ16の出力に基づいて行われる第二補正とを含んでいる。
以下、図4を参照しつつ本実施形態において上述した空燃比制御の下流側センサ16の出力に基づく補正のために実施される制御について説明する。図4はこの制御の制御ルーチンを示すフローチャートである。本制御ルーチンはECU18により内燃機関の始動と同時にスタートされる。
本制御ルーチンがスタートすると、まずステップ101において、基本要求補正量Crが下流側センサ16の出力に基づいて算出される。ここで算出される基本要求補正量Crは、上述した学習値に基づく第一補正が実行されること前提として、更に要求される補正量である。したがって、ここでの基本要求補正量Crの算出においては、その時点で最新の学習値が考慮される。なお、本実施形態においては、学習値Csの初期値はゼロであり、後述するステップ105において下流側センサ出力に基づいて更新されるようになっている。
ステップ101において基本要求補正量Crが算出されるとステップ103に進む。ステップ103においては、下流側センサ16の温度Tsが所定温度Tc以上であるか否かが判定される。ここで所定温度Tcとしては、例えば、上述した大気の漏洩による酸素センサ出力への影響が大きくなると判断される温度が予め実験などによって求められ、その温度が用いられる。
なお、このステップ103における温度の判定は、下流側センサ16の温度を実際に測定して行うようにしても良いが、本実施形態では、吸入空気量Gaが予め定めた比較的高い吸入空気量X以上となる高負荷の運転が予め定めた期間Prd以上継続された場合に下流側センサ16の温度Tsが上記所定温度Tc以上になっていると判定するようになっている。したがって、本実施形態においてステップ103では、より詳細には上記予め定めた吸入空気量X以上の高負荷の運転が予め定めた期間Prd以上継続されたか否かが判定されている。
ステップ103において、下流側センサ16の温度Tsが上記所定温度Tc以上になっていないと判定された場合にはステップ104に進み、下流側センサ16の温度Tsが上記所定温度Tc以上になっていると判定された場合にはステップ113に進む。
ステップ104に進んだ場合には、そこで後述するステップ115において計測が開始(もしくは継続)される経過時間Wt(吸入空気量Gaが基準吸入空気量α未満である運転が行われていると判定された後の経過時間)の値がクリアされる(すなわち、ゼロにされる)。そしてステップ105に進んで学習値Csの更新が実行される。
ステップ105で学習値Csが更新されると、ステップ107に進み、更新後の学習値Csを考慮した修正要求補正量Crkが算出される。この修正要求補正量Crkは、直前のステップ105で更新された学習値Csに基づく第一補正が実行されること前提として、更に要求される補正量である。ここで修正要求補正量Crkは、更新前および更新後の両学習値Cs、並びにステップ101で算出された基本要求補正量Crに基づいて算出される。
ステップ107で修正要求補正量Crkが算出されるとステップ109に進み、ステップ107で算出された修正要求補正量Crkに基づく第二補正が実行される。そして更にステップ123に進み、学習値Csに基づく第一補正が実行される。なお、この場合の第一補正は、今回の制御ルーチンの実行時にステップ105で更新された学習値Csに基づいて行われる。ステップ123において第一補正が実行されると、ステップ101に戻り、本制御ルーチンによる制御が再度始めから実行される。
一方、ステップ103において上流側センサ16の温度Tsが上記所定温度Tc以上になっていると判定され、ステップ113に進んだ場合には、そこで吸入空気量Gaが基準吸入空気量α未満であるか否かが判定される。ここで基準吸入空気量αとしては、例えば、上述した大気の漏洩による酸素センサ出力への影響が大きくなると判断される吸入空気量が予め実験などによって求められ、その吸入空気量が用いられる。
ステップ113において、吸入空気量Gaが上記基準吸入空気量α以上であると判定された場合にはステップ104に進み、ステップ104以降の上述したような制御が実施される。一方、ステップ113において、吸入空気量Gaが上記基準吸入空気量α未満であると判定された場合にはステップ115に進み、吸入空気量Gaが上記基準吸入空気量α未満である運転が行われていると判定された後の経過時間Wtの計測が開始される、もしくは同計測が既に開始されている場合にはその計測が継続される。
ステップ115に続くステップ117では、吸入空気量Gaが上記基準吸入空気量α未満である運転が行われていると判定された後、上記基準吸入空気量α未満の運転が継続された状態で予め定めた待ち時間Wtcが経過したか否かが判定される。ステップ117において、上記予め定めた待ち時間Wtcが経過したと判断された場合にはステップ104に進み、ステップ104以降の上述したような制御が実施される。一方、ステップ117において、上記予め定めた待ち時間Wtcが経過していないと判断された場合にはステップ119に進む。
なお、上記待ち時間Wtcとしては、例えば上記下流側センサ16の温度Tsが上記所定温度Tc未満になると判断される経過時間が予め実験などによって求められ、その時間が用いられる。また、ここでの予め定めた待ち時間が経過したか否かの判定については、上述したように経過時間を基準とするのではなく、例えば、吸入空気量Gaが上記基準吸入空気量α未満である運転が行われていると判定された後に上記基準吸入空気量α未満の運転が継続されている状態での吸入空気量Gaの積算値が予め定めた値に達したときに、上記予め定めた待ち時間が経過したと判定するようにしても良い。あるいは、下流側センサ16の温度Tsが上記所定温度Tc未満になったときに上記予め定めた待ち時間が経過したと判定するようにしても良い。
ステップ117に続いてステップ119に進んだ場合には、そこで制限要求補正量Crlが算出される。この制限要求補正量Crlの算出は、例えばステップ101で算出された基本要求補正量Crに予め定めた係数k(0<k<1であり、例えばk=0.2)を乗算することによって行われる。あるいは、ステップ101で算出された基本要求補正量Crが所定値(もしくは所定割合)以下の場合には、基本要求補正量Crをそのまま制限要求補正量Crlとし、ステップ101で算出された基本要求補正量Crが所定値(もしくは所定割合)よりも大きい場合には、その所定値(もしくは所定割合)を制限要求補正量Crlとするようにしても良い。すなわち、例えば、上記基本要求補正量Crは、−20%≦Cr≦+20%での設定を許容する一方、上記制限要求補正量Crlは、−5%≦Crl≦+5%での設定のみ許容するようにする。
ステップ119で制限要求補正量Crlが算出されるとステップ121に進み、ステップ119で算出された制限要求補正量Crlに基づく第二補正が実行される。そして更にステップ123に進み、学習値Csに基づく第一補正が実行される。なお、この場合、今回の制御ルーチンの実行時にはステップ105を通らず学習値Csは更新されていないので、この第一補正は、今回の制御ルーチンの開始時に記憶されていた学習値Csに基づいて行われる。ステップ123において第一補正が実行されると、ステップ101に戻り、本制御ルーチンによる制御が再度始めから実行される。
以上のように、本実施形態によれば、上記下流側センサ16の温度Tsが所定温度Tc以上であるときに、吸入空気量Gaが予め定めた基準吸入空気量α未満の運転が行われていると判定された場合には、同判定後、上記基準吸入空気量α未満の運転が継続される予め定めた待ち時間Wtcの間、上記下流側センサ16の出力に基づいた補正が制限されるようになっている。より詳細には、本実施形態では上記補正が上記下流側センサ16の出力に基づいて更新される学習値Csに基づいて行われる第一補正と、同第一補正を補足するように上記下流側センサ16の出力に基づいて行われる第二補正とを含んでいて、上記下流側センサ16の温度Tsが所定温度Tc以上であるときに、吸入空気量Gaが予め定めた基準吸入空気量α未満の運転が行われていると判定された場合には、同判定後、上記基準吸入空気量α未満の運転が継続される予め定めた待ち時間Wtcの間、上記学習値Csの更新が禁止されると共に、上記第二補正が制限されるようになっている。
そして、このようにすることによって、下流側センサ16の出力の精度が低下することが特に懸念される場合において同下流側センサ16の出力に基づいた補正が制限されるので、結果としてより精度良く空燃比制御を実施することが可能となる。
図5は、本実施形態の空燃比制御装置を適用した内燃機関における吸入空気量Ga、下流側センサ16の温度Ts、空燃比A/Fの経時変化の一例を示したものである。ここで、空燃比A/Fの目標値は常に理論空燃比λである。また、空燃比A/Fを示しているところにおいて実線で示されているのが本実施形態の空燃比制御装置を適用した場合であり、点線で示されているのが従来の場合である。この図から、本実施形態の空燃比制御装置によってより精度良く空燃比制御を実施できることがわかる。
なお、上述した実施形態では、上記予め定めた待ち時間Wtcの間、上記学習値Csの更新が禁止されると共に、上記第二補正が制限されるようになっていたが、他の実施形態では、上記予め定めた待ち時間Wtcの間、上記学習値Csの更新が禁止されると共に、上記第二補正が禁止されるようになっていても良い。この制御は、図4に示された制御ルーチンのフローチャートにおいて、ステップ119とステップ121を削除することによって実現できる。
次に本発明の別の実施形態について説明する。この実施形態は図1に示したような構成において実施され得るもので、上述した実施形態と共通する部分を多く有しており、それら共通する部分については原則として説明を省略する。
この実施形態は、上記下流側センサ(酸素センサ)16における排気側への大気の漏洩が同下流側センサ16の劣化度合が高いほど生じ易くなり、その結果センサ出力の精度が低下し易くなることを考慮したものであり、上記下流側センサ16の劣化度合に応じて上記基準吸入空気量αの値を変更するというものである。なお、図6は、図3に酸素センサの温度が比較的高く且つ吸入空気量が比較的少ない場合で酸素センサの劣化が進んでいる場合(一点鎖線で図示)について追加したものであり、この図からも酸素センサの劣化度合が高い場合にセンサ出力の精度が更に低下し易くなることがわかる。
以下、図7を参照しつつ、この実施形態において、空燃比制御の下流側センサ16の出力に基づく補正のために実施される制御について説明する。図7はこの制御の制御ルーチンを示すフローチャートである。本制御ルーチンはECU18により内燃機関の始動と同時にスタートされる。
本制御ルーチンがスタートすると、まずステップ201において、基本要求補正量Crが算出され、続くステップ203において、下流側センサ16の温度Tsが所定温度Tc以上であるか否かが判定される。これらステップ201および203における制御は、上述した図4の制御ルーチンのステップ101および103における制御と同様である。
ステップ203において、下流側センサ16の温度Tsが上記所定温度Tc以上になっていないと判定された場合には、その後ステップ204、205、207、209、223と進むことになるが、この場合の制御は上述した図4の制御ルーチンにおいてステップ104、105、107、109、123と進む場合の制御と同様である(ステップ204、205、207、209、223の各ステップは、順にステップ104、105、107、109、123に対応する。)。
一方、下流側センサ16の温度Tsが上記所定温度Tc以上になっていると判定された場合にはステップ211に進む。そしてステップ211においては、上記下流側センサ16の劣化度合Dsが推定される。本実施形態では、この劣化度合Dsが触媒の劣化度合と相関があることを利用し、上流側触媒10の劣化度合を表す上流側触媒10の触媒劣化係数(最大O2吸蔵能力)Cmaxを求めることで、上記下流側センサ16の劣化度合Dsを推定するようにしている。すなわち、上流側触媒10の劣化度合が高いほど下流側センサ16の劣化度合も高いと考えられるので、求められた触媒劣化係数Cmaxが小さいほど下流側センサ16の劣化度合が高いものとする。本実施形態では上記触媒劣化係数Cmaxが内燃機関の始動から停止までの間に少なくとも一回測定され、実際にステップ211ではその時点の最新の値が読み込まれるようになっている。
ステップ211で上記下流側センサ16の劣化度合Dsが推定されると、ステップ212に進む。ステップ212では続くステップ213で使用される基準吸入空気量αが、ステップ211で推定された劣化度合Dsに基づいて決定される。ステップ213における制御は、図4の制御ルーチンのステップ113における制御と同様であり、したがってここで決定される基準吸入空気量αは、ステップ213において下流側センサ16の出力に基づく空燃比制御の補正を制限するか否かの判定基準として用いられるものである。
ここで、上記基準吸入空気量αの決定は、例えば上記劣化度合Ds(本実施形態では上記触媒劣化係数Cmax)と適切な基準吸入空気量αとの関係を予め求めてマップにしておき、これに基づいて行うようにする。図8は、本実施形態で用いられるマップの例である。このようなマップが予め求められてECU18に記憶されていて、ステップ212ではこのようなマップに基づいて上記基準吸入空気量αが決定される。図8のマップによれば、上記触媒劣化係数Cmaxが小さいほど、すなわち上記下流側センサ16の劣化度合Dsが高いほど上記基準吸入空気量αが大きくなる。
なお、以上で説明したように本実施形態では上記下流側センサ16の劣化度合Dsが上流側触媒10の劣化度合、すなわち上流側触媒10の触媒劣化係数(最大O2吸蔵能力)Cmaxを求めることで推定されたが、他の実施形態では、上記劣化度合Dsが例えば、下流側センサ16の使用期間、その下流側センサ16の使用開始後の車両の積算走行距離、その下流側センサ16の使用開始後の内燃機関の積算吸入空気量などに基づいて推定されても良い。この場合、劣化度合Dsを表す上記各値と適切な基準吸入空気量αとの関係を表すマップを予め求めておき、ステップ212ではそのマップに基づいて上記基準吸入空気量αを決定するようにする。
ステップ212で上記基準吸入空気量αが決定されるとステップ213に進む。上述したようにステップ213における制御は図4の制御ルーチンのステップ113における制御と同様である。ステップ213において、吸入空気量Gaが上記基準吸入空気量α以上であると判定された場合にはステップ204に進み、ステップ204以降の上記制御が順次実施される。一方、ステップ213において、吸入空気量Gaが上記基準吸入空気量α未満であると判定された場合にはステップ215、217、223と進むことになる。ここで、ステップ215、217、223における制御はそれぞれ図4の制御ルーチンのステップ115、117、123における制御と同様である。
つまり、この場合、吸入空気量Gaが上記基準吸入空気量α未満である運転が行われていると判定された後、予め定めた待ち時間Wtcが経過するまでの間、学習値Csに基づく第一補正以外の補正(すなわち第二補正)が禁止される。そしてこの場合には上記学習値Csの更新は行われない。なお、他の実施形態では、ステップ217の後に上述した図4の制御ルーチンのステップ119およびステップ121に相当するステップを挿入しても良い。この場合には、上記第二補正は禁止されず制限されることになる。
以上の説明から明らかなように、本実施形態によっても先に説明した実施形態と同様、下流側センサ16の出力の精度が低下することが特に懸念される場合において同下流側センサ16の出力に基づいた補正を制限することができ、結果としてより精度良く空燃比制御を実施することが可能となる。また、特に本実施形態では上記補正の制限を実施するか否かの判定基準として用いる上記基準吸入空気量αを、上記下流側センサ16の劣化度合が高いほど大きくすることによって、空燃比制御の精度の向上をより確実に図ることができる。
2 機関本体
4 吸気管
6 排気管
8 エアフローメータ
10 上流側触媒
12 下流側触媒
14 上流側センサ
16 下流側センサ
18 電子制御ユニット
4 吸気管
6 排気管
8 エアフローメータ
10 上流側触媒
12 下流側触媒
14 上流側センサ
16 下流側センサ
18 電子制御ユニット
Claims (3)
- 内燃機関の排気通路に設けられた排気浄化手段と、
上記排気通路を流通する排気ガスの空燃比を検出する、もしくは酸素濃度を検出するセンサであって、上記排気浄化手段よりも上流側に設けられた上流側センサと、
上記排気通路を流通する排気ガスの酸素濃度を検出するセンサであって、上記排気浄化手段よりも下流側に設けられた下流側センサと、を具備し、
上記上流側センサの出力に基づく空燃比制御が上記下流側センサの出力に基づいて補正される、内燃機関の空燃比制御装置において、
上記下流側センサの温度が所定温度以上であるときに、上記内燃機関において吸入空気量が予め定めた基準吸入空気量未満の運転が行われていると判定された場合には、該判定後、上記基準吸入空気量未満の運転が継続される予め定めた待ち時間の間、上記下流側センサの出力に基づいた補正が制限されることを特徴とする内燃機関の空燃比制御装置。 - 内燃機関の排気通路に設けられた排気浄化手段と、
上記排気通路を流通する排気ガスの空燃比を検出する、もしくは酸素濃度を検出するセンサであって、上記排気浄化手段よりも上流側に設けられた上流側センサと、
上記排気通路を流通する排気ガスの酸素濃度を検出するセンサであって、上記排気浄化手段よりも下流側に設けられた下流側センサと、を具備し、
上記上流側センサの出力に基づく空燃比制御が上記下流側センサの出力に基づいて補正される、内燃機関の空燃比制御装置において、
上記補正は、上記下流側センサの出力に基づいて更新される学習値に基づいて行われる第一補正と、該第一補正を補足するように上記下流側センサの出力に基づいて行われる第二補正とを含んでいて、
上記下流側センサの温度が所定温度以上であるときに、上記内燃機関において吸入空気量が予め定めた基準吸入空気量未満の運転が行われていると判定された場合には、該判定後、上記基準吸入空気量未満の運転が継続される予め定めた待ち時間の間、上記学習値の更新が禁止されると共に、上記第二補正が制限もしくは禁止されることを特徴とする内燃機関の空燃比制御装置。 - 上記基準吸入空気量が、上記下流側センサの劣化度合が高いほど大きくされる、請求項1または2に記載の内燃機関の空燃比制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005015306A JP2006200501A (ja) | 2005-01-24 | 2005-01-24 | 内燃機関の空燃比制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005015306A JP2006200501A (ja) | 2005-01-24 | 2005-01-24 | 内燃機関の空燃比制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006200501A true JP2006200501A (ja) | 2006-08-03 |
Family
ID=36958709
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005015306A Pending JP2006200501A (ja) | 2005-01-24 | 2005-01-24 | 内燃機関の空燃比制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006200501A (ja) |
-
2005
- 2005-01-24 JP JP2005015306A patent/JP2006200501A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4835497B2 (ja) | 内燃機関の空燃比制御装置 | |
| KR100899313B1 (ko) | 내연 기관의 공연비 제어 장치 | |
| JP5338974B2 (ja) | 内燃機関の排気浄化装置 | |
| JP5206774B2 (ja) | 触媒劣化の診断装置 | |
| JP3997599B2 (ja) | 内燃機関の空燃比制御装置 | |
| JP2006083796A (ja) | 内燃機関の空燃比制御装置 | |
| US7520274B2 (en) | Air fuel ratio sensor deterioration determination system for compression ignition internal combustion engine | |
| JP2008297968A (ja) | 内燃機関の制御装置 | |
| JP4645543B2 (ja) | 内燃機関用排ガス浄化装置 | |
| JP2006200501A (ja) | 内燃機関の空燃比制御装置 | |
| JP4432515B2 (ja) | 内燃機関の排気浄化装置 | |
| JP5070770B2 (ja) | 内燃機関の排気浄化装置 | |
| JP4032840B2 (ja) | 内燃機関の排出ガス浄化装置 | |
| JP2005337029A (ja) | 内燃機関の排気浄化装置 | |
| JP2013185512A (ja) | 空燃比センサの出力補正装置 | |
| JP2011174426A (ja) | 空燃比制御装置 | |
| JP2007040130A (ja) | 内燃機関の排気浄化装置 | |
| JP4214923B2 (ja) | 内燃機関の排気浄化装置 | |
| JP4655971B2 (ja) | 硫黄被毒回復制御装置 | |
| JP5835343B2 (ja) | 空燃比検出装置及び空燃比検出方法 | |
| JP4422398B2 (ja) | 内燃機関の排気浄化装置 | |
| JP4631691B2 (ja) | 内燃機関の排気浄化装置 | |
| JP3601210B2 (ja) | エンジンの空燃比制御装置 | |
| JP2006307716A (ja) | 内燃機関の空燃比制御装置 | |
| JP5077047B2 (ja) | 内燃機関の制御装置 |