JP2006200976A - 超音波センサ - Google Patents
超音波センサ Download PDFInfo
- Publication number
- JP2006200976A JP2006200976A JP2005011484A JP2005011484A JP2006200976A JP 2006200976 A JP2006200976 A JP 2006200976A JP 2005011484 A JP2005011484 A JP 2005011484A JP 2005011484 A JP2005011484 A JP 2005011484A JP 2006200976 A JP2006200976 A JP 2006200976A
- Authority
- JP
- Japan
- Prior art keywords
- receiving
- ultrasonic sensor
- conversion means
- ultrasonic
- same
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/521—Constructional features
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01H—MEASUREMENT OF MECHANICAL VIBRATIONS OR ULTRASONIC, SONIC OR INFRASONIC WAVES
- G01H3/00—Measuring characteristics of vibrations by using a detector in a fluid
- G01H3/04—Frequency
- G01H3/08—Analysing frequencies present in complex vibrations, e.g. comparing harmonics present
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
- Transducers For Ultrasonic Waves (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
【課題】振動板間の音響的クロストークを低減して検出対象物の位置および距離の高精度な測定が可能で小型・軽量な超音波センサを低コストに提供する。
【解決手段】超音波センサの受信部10を構成する各受信素子11a〜11eは、超音波の受信面Sを同一方向に向け、長さ方向の一端部が一直線上に揃えられると共に幅方向にほとんど隙間無く並べられることにより同一平面上にて1次元配置され、その幅Bおよび厚みHは同一で、長さLだけが異なるように形成されている。また、各受信素子11a〜11eの長さ方向の両端部は振動不能に固定されている。そして、各受信素子11a〜11eの1次共振周波数が異なる値になるように、その長さLが設定されている。
【選択図】 図1
【解決手段】超音波センサの受信部10を構成する各受信素子11a〜11eは、超音波の受信面Sを同一方向に向け、長さ方向の一端部が一直線上に揃えられると共に幅方向にほとんど隙間無く並べられることにより同一平面上にて1次元配置され、その幅Bおよび厚みHは同一で、長さLだけが異なるように形成されている。また、各受信素子11a〜11eの長さ方向の両端部は振動不能に固定されている。そして、各受信素子11a〜11eの1次共振周波数が異なる値になるように、その長さLが設定されている。
【選択図】 図1
Description
本発明は超音波センサに係り、詳しくは、受信した超音波を電気信号に変換するか又は電気信号を超音波に変換して発信する超音波センサに関するものである。
従来より、音響測深機や魚群探知機などの垂直ソナー、船舶が目標物の方向および自船からの距離を測定するための水平ソナー、臓器を画像化して診断するための超音波診断装置など、様々な分野に超音波センサが広く利用されている。
また、近年、自動車(車両)に超音波センサを搭載し、その超音波センサから発信した人体に無害な超音波の反射を受信することにより、自動車の周囲にある物体の2次元あるいは3次元の位置測定および距離測定を行い、自動車の周囲を監視して安全走行に役立てる技術の開発がすすめられている。
例えば、自動車の後部に超音波センサを搭載し、自動車の後方に存在する物体(人間や障害物など)を検知する装置(一般に「バックソナー」と呼ばれる)を用い、当該物体との衝突を回避してバックでの駐車を支援する自動駐車支援システムが実用化されている。
例えば、自動車の後部に超音波センサを搭載し、自動車の後方に存在する物体(人間や障害物など)を検知する装置(一般に「バックソナー」と呼ばれる)を用い、当該物体との衝突を回避してバックでの駐車を支援する自動駐車支援システムが実用化されている。
このような検出対象物の位置測定および距離測定に使用される超音波センサ(超音波探触子)として、例えば、有機高分子を介して連結された複数の圧電体素子からなる複合圧電体と、この複合圧電体の一方の面上に互いに間隙を保って複数個配列されたアレイ電極とを備え、上記アレイ電極の間隙部にあたる上記複合圧電体の部分には上記有機高分子より音波減衰係数の大きい充填材を充填したものが開示されている(特許文献1参照)。
特開平5−347797号公報(第2〜4頁 図1〜図3)
特許文献1の技術を含め、従来の超音波センサにおいて、受信(受音)した超音波を電気信号に変換する受信部は、同一寸法形状の複数個の振動板(特許文献1のアレイ電極)を同一平面上にて1方向に整然と並べて配置する1次元配置、または、同一寸法形状の複数個の振動板を同一平面上にて縦横2方向に整然と並べて配置する2次元配置のいずれかの構造をとる。
そして、外部から入力した電気信号を超音波に変換して発信(発音)する超音波センサの発信部が、検出対象物に対して超音波を発信し、その超音波が検出対象物に反射した反射音を受信部の各振動板で受信する。
そして、外部から入力した電気信号を超音波に変換して発信(発音)する超音波センサの発信部が、検出対象物に対して超音波を発信し、その超音波が検出対象物に反射した反射音を受信部の各振動板で受信する。
そこで、受信部が複数個の振動板(受音板)で受信した超音波のタイミングのずれを検出し、その受信した超音波のタイミングのずれと発信部が発射した超音波とを比較することにより、検出対象物の2次元あるいは3次元の位置測定、超音波センサと検出対象物との距離測定などを行うことができる。
また、従来の超音波センサの発信部は、通常、1個の振動板(発音板)から検出対象物に対して超音波を発信する。
尚、複数個の振動板から超音波を発信するタイプも提案されているが、そのタイプの発信部は、受信部と同様に、同一寸法形状の複数個の振動板を同一平面上に1次元配置または2次元配置した構造をとる。
そして、発信部が複数個の振動板を備える理由は、超音波の発信出力を増大することにある。
尚、複数個の振動板から超音波を発信するタイプも提案されているが、そのタイプの発信部は、受信部と同様に、同一寸法形状の複数個の振動板を同一平面上に1次元配置または2次元配置した構造をとる。
そして、発信部が複数個の振動板を備える理由は、超音波の発信出力を増大することにある。
ところで、従来の受信部は、同一寸法形状の複数個の振動板が並べて配置されているため、各振動板は全て同じ共振周波数をもつことになり、各振動板間における音響的クロストークが大きくなることから、検出対象物の位置および距離の測定精度が低下するという問題があった。
そこで、特許文献1の技術では、複数個配列されたアレイ電極(振動板)の間隙部に位置する複合圧電体の部分に、複合圧電体を構成する有機高分子に比べて音波減衰係数の大きい充填材を充填することにより、各アレイ電極間における音響的クロストークを低減して方位分解能を高めるようにしている。
しかし、特許文献1の技術では、充填材を充填するための製造工程が必要になるため、その製造工程分だけ製造コストが増大するという問題がある。さらに、特許文献1の技術では、充填材の体積分および重量分だけ、超音波センサ(超音波探触子)の全体寸法(体格)および重量が大きくなるという問題もある。
また、近年、検出対象物の位置および距離の測定精度を向上させるために、発信部から発信される超音波を和音にすることが要求されている。
また、近年、検出対象物の位置および距離の測定精度を向上させるために、発信部から発信される超音波を和音にすることが要求されている。
本発明は上記問題を解決するため又は上記要求を満足するためになされたものであって、以下の目的を有するものである。
(1)振動板間の音響的クロストークを低減して検出対象物の位置および距離の高精度な測定が可能で小型・軽量な超音波センサを低コストに提供する。
(2)発信する超音波を和音にすることが可能な超音波センサを低コストに提供する。
(1)振動板間の音響的クロストークを低減して検出対象物の位置および距離の高精度な測定が可能で小型・軽量な超音波センサを低コストに提供する。
(2)発信する超音波を和音にすることが可能な超音波センサを低コストに提供する。
請求項1に記載の発明は、受信した超音波を電気信号に変換するか又は電気信号を超音波に変換して発信する複数個の変換手段を備え、各変換手段の1次共振周波数が一致しないように、当該各変換手段の寸法を不揃いにした超音波センサを技術的特徴とする。
請求項2に記載の発明は、
請求項1に記載の超音波センサにおいて、
前記各変換手段は平板矩形状であり、
前記各変換手段は、超音波を受信するための受信面または超音波を発信するための発信面を同一方向に向け、長さ方向の一端部が一直線上に揃えられると共に幅方向に並べられることにより、同一平面上にて1次元配置され、その幅および厚みは同一で、長さだけが異なるように形成されていることを技術的特徴とする。
請求項1に記載の超音波センサにおいて、
前記各変換手段は平板矩形状であり、
前記各変換手段は、超音波を受信するための受信面または超音波を発信するための発信面を同一方向に向け、長さ方向の一端部が一直線上に揃えられると共に幅方向に並べられることにより、同一平面上にて1次元配置され、その幅および厚みは同一で、長さだけが異なるように形成されていることを技術的特徴とする。
請求項3に記載の発明は、
請求項1に記載の超音波センサにおいて、
前記各変換手段は平板矩形状であり、
前記各変換手段は、超音波を受信するための受信面または超音波を発信するための発信面を同一方向に向け、長さ方向の両端部がそれぞれ一直線上に揃えられると共に幅方向に並べられることにより、同一平面上にて1次元配置され、その長さおよび厚みは同一で、幅だけが異なるように形成されていることを技術的特徴とする。
請求項1に記載の超音波センサにおいて、
前記各変換手段は平板矩形状であり、
前記各変換手段は、超音波を受信するための受信面または超音波を発信するための発信面を同一方向に向け、長さ方向の両端部がそれぞれ一直線上に揃えられると共に幅方向に並べられることにより、同一平面上にて1次元配置され、その長さおよび厚みは同一で、幅だけが異なるように形成されていることを技術的特徴とする。
請求項4に記載の発明は、
請求項1に記載の超音波センサにおいて、
前記各変換手段は平板矩形状であり、
前記各変換手段は、超音波を受信するための受信面または超音波を発信するための発信面を同一方向に向け、長さ方向の両端部がそれぞれ一直線上に揃えられると共に幅方向に並べられることにより、同一平面上にて1次元配置され、その長さおよび幅は同一で、厚みだけが異なるように形成されていることを技術的特徴とする。
請求項1に記載の超音波センサにおいて、
前記各変換手段は平板矩形状であり、
前記各変換手段は、超音波を受信するための受信面または超音波を発信するための発信面を同一方向に向け、長さ方向の両端部がそれぞれ一直線上に揃えられると共に幅方向に並べられることにより、同一平面上にて1次元配置され、その長さおよび幅は同一で、厚みだけが異なるように形成されていることを技術的特徴とする。
請求項5に記載の発明は、
請求項1に記載の超音波センサにおいて、
前記各変換手段は平板矩形状であり、
前記各変換手段は、超音波を受信するための受信面または超音波を発信するための発信面を同一方向に向けて並べられることにより、同一平面上にて縦横方向に2次元配置され、その長さ,幅,厚みはそれぞれ異なる寸法に形成されていることを技術的特徴とする。
請求項1に記載の超音波センサにおいて、
前記各変換手段は平板矩形状であり、
前記各変換手段は、超音波を受信するための受信面または超音波を発信するための発信面を同一方向に向けて並べられることにより、同一平面上にて縦横方向に2次元配置され、その長さ,幅,厚みはそれぞれ異なる寸法に形成されていることを技術的特徴とする。
請求項6に記載の発明は、
請求項2〜5のいずれか1項に記載の超音波センサにおいて、
前記各変換手段は、前記受信面または前記発信面が面一になるように配置されていることを技術的特徴とする。
請求項2〜5のいずれか1項に記載の超音波センサにおいて、
前記各変換手段は、前記受信面または前記発信面が面一になるように配置されていることを技術的特徴とする。
請求項7に記載の発明は、
請求項2〜6のいずれか1項に記載の超音波センサにおいて、
前記各変換手段は、その長さ方向の両端部が振動不能に固定されていることを技術的特徴とする。
請求項2〜6のいずれか1項に記載の超音波センサにおいて、
前記各変換手段は、その長さ方向の両端部が振動不能に固定されていることを技術的特徴とする。
請求項8に記載の発明は、
請求項7に記載の超音波センサにおいて、
前記各変換手段の共振値Qは同一であり、
前記各変換手段のうちの任意の変換手段の1次共振周波数f1に対して、当該変換手段の次に寸法が大きいか又は小さい変換手段の1次共振周波数fが、整数である任意の係数nを用いて、以下の数式で表されることを技術的特徴とする。
f=f1±n×f1/Q
請求項7に記載の超音波センサにおいて、
前記各変換手段の共振値Qは同一であり、
前記各変換手段のうちの任意の変換手段の1次共振周波数f1に対して、当該変換手段の次に寸法が大きいか又は小さい変換手段の1次共振周波数fが、整数である任意の係数nを用いて、以下の数式で表されることを技術的特徴とする。
f=f1±n×f1/Q
請求項9に記載の発明は、
請求項8に記載の超音波センサにおいて、
前記係数n=7または前記係数n=8であることを技術的特徴とする。
請求項8に記載の超音波センサにおいて、
前記係数n=7または前記係数n=8であることを技術的特徴とする。
請求項10に記載の発明は、
請求項8または請求項9に記載の超音波センサにおいて、
前記各変換手段の長さL、幅B、厚みH、1次共振周波数fは、以下の数式で表されることを技術的特徴とする。
f=(B×H3)1/2/L2
請求項8または請求項9に記載の超音波センサにおいて、
前記各変換手段の長さL、幅B、厚みH、1次共振周波数fは、以下の数式で表されることを技術的特徴とする。
f=(B×H3)1/2/L2
請求項11に記載の発明は、
請求項1〜10のいずれか1項に記載の超音波センサにおいて、
前記変換手段は、圧電式または静電容量式であることを技術的特徴とする。
請求項1〜10のいずれか1項に記載の超音波センサにおいて、
前記変換手段は、圧電式または静電容量式であることを技術的特徴とする。
(請求項1)
請求項1の発明において、受信した超音波を電気信号に変換する受信素子として各変換手段を機能させ、各変換手段から受信部を構成する場合には、受信部とは別に設けた超音波センサの発信部が、検出対象物に対して超音波を発信し、その超音波が検出対象物に反射した反射音を受信部の各受信素子(変換手段)で受信する。
そして、受信部が各受信素子(変換手段)で受信した超音波のタイミングのずれを検出し、その受信した超音波のタイミングのずれと発信部が発射した超音波とを比較することにより、検出対象物の2次元あるいは3次元の位置測定、超音波センサと検出対象物との距離測定などを行うことができる。
請求項1の発明において、受信した超音波を電気信号に変換する受信素子として各変換手段を機能させ、各変換手段から受信部を構成する場合には、受信部とは別に設けた超音波センサの発信部が、検出対象物に対して超音波を発信し、その超音波が検出対象物に反射した反射音を受信部の各受信素子(変換手段)で受信する。
そして、受信部が各受信素子(変換手段)で受信した超音波のタイミングのずれを検出し、その受信した超音波のタイミングのずれと発信部が発射した超音波とを比較することにより、検出対象物の2次元あるいは3次元の位置測定、超音波センサと検出対象物との距離測定などを行うことができる。
そこで、各受信素子(変換手段)の1次共振周波数が一致しないように、各受信素子の寸法を不揃いにすれば、各受信素子が互いの振動によって受ける影響をほとんど無視できる小さな値にすることが可能になり、各受信素子間における音響的クロストークを低減し、検出対象物の位置および距離の測定精度を高めることができる。
従って、請求項1の発明によれば、各受信素子(変換手段)の寸法だけを異ならせるだけでよく、超音波センサの製造に特別な工程が必要ないため、充填材を充填するための製造工程が必要な特許文献1の技術に比べて、超音波センサの製造コストを低減することができる。
また、請求項1の発明によれば、各受信素子(変換手段)の寸法だけを異ならせるだけでよく、各受信素子間には振動が直接伝達しない程度のごく僅かな隙間だけを設ければよいため、充填材の体積分および重量分だけ全体寸法および重量が大きくなる特許文献1の技術に比べて、超音波センサを小型・軽量化することができる。
尚、受信素子(変換手段)の個数および配置間隔は、必要な前記測定精度に応じてカット・アンド・トライで実験的に最適値を見つけて設定すればよい。
また、請求項1の発明によれば、各受信素子(変換手段)の寸法だけを異ならせるだけでよく、各受信素子間には振動が直接伝達しない程度のごく僅かな隙間だけを設ければよいため、充填材の体積分および重量分だけ全体寸法および重量が大きくなる特許文献1の技術に比べて、超音波センサを小型・軽量化することができる。
尚、受信素子(変換手段)の個数および配置間隔は、必要な前記測定精度に応じてカット・アンド・トライで実験的に最適値を見つけて設定すればよい。
また、請求項1の発明において、外部から入力した電気信号を超音波に変換して発信する発信素子として各変換手段を機能させ、各変換手段から発信部を構成する場合には、各発信素子の1次共振周波数が異なる値に設定されているため、各発信素子(変換手段)から発信される超音波を和音にすることができる。
(請求項2:第1実施形態に該当)
請求項2の発明によれば、各変換手段間に振動が直接伝達しない程度のごく僅かな隙間だけを設けて各変換手段を並べ、各変換手段の長さだけを異ならせるだけで、請求項1の発明の作用・効果を得ることが可能になる。
請求項2の発明によれば、各変換手段間に振動が直接伝達しない程度のごく僅かな隙間だけを設けて各変換手段を並べ、各変換手段の長さだけを異ならせるだけで、請求項1の発明の作用・効果を得ることが可能になる。
(請求項3:第2実施形態に該当)
請求項3の発明によれば、各変換手段間に振動が直接伝達しない程度のごく僅かな隙間だけを設けて各変換手段を並べ、各変換手段の幅だけを異ならせるだけで、請求項1の発明の作用・効果を得ることが可能になる。
また、請求項3の発明によれば、受信部または発信部の全体形状が平板矩形状になるため、請求項2の発明に比べて、各変換手段の長さ方向の両端部の構造を単純化することが可能になり、超音波センサの作製が容易になることから、超音波センサの製造コストを更に低減することができる。
請求項3の発明によれば、各変換手段間に振動が直接伝達しない程度のごく僅かな隙間だけを設けて各変換手段を並べ、各変換手段の幅だけを異ならせるだけで、請求項1の発明の作用・効果を得ることが可能になる。
また、請求項3の発明によれば、受信部または発信部の全体形状が平板矩形状になるため、請求項2の発明に比べて、各変換手段の長さ方向の両端部の構造を単純化することが可能になり、超音波センサの作製が容易になることから、超音波センサの製造コストを更に低減することができる。
(請求項4:第3実施形態に該当)
請求項4の発明によれば、各変換手段間に振動が直接伝達しない程度のごく僅かな隙間だけを設けて各変換手段を並べ、各変換手段の厚みだけを異ならせるだけで、請求項1の発明の作用・効果を得ることが可能になる。
また、請求項4の発明によれば、請求項3の発明に比べて、受信部または発信部の幅が小さくなり、受信部または発信部を上方から見た平面寸法が小さくなるため、受信部または発信部をパッケージ)に収容した場合の体積を小さくすることが可能になり、超音波センサを更に小型・軽量化することができる。
請求項4の発明によれば、各変換手段間に振動が直接伝達しない程度のごく僅かな隙間だけを設けて各変換手段を並べ、各変換手段の厚みだけを異ならせるだけで、請求項1の発明の作用・効果を得ることが可能になる。
また、請求項4の発明によれば、請求項3の発明に比べて、受信部または発信部の幅が小さくなり、受信部または発信部を上方から見た平面寸法が小さくなるため、受信部または発信部をパッケージ)に収容した場合の体積を小さくすることが可能になり、超音波センサを更に小型・軽量化することができる。
(請求項5:第4実施形態に該当)
請求項5の発明によれば、各変換手段間に振動が直接伝達しない程度のごく僅かな隙間だけを設けて各変換手段を並べ、各変換部の長さ,幅,厚みはそれぞれ異なる寸法に設定することで、請求項1の発明の作用・効果を得ることが可能になる。
また、請求項5の発明によれば、各変換手段を2次元配置することにより、各変換手段を受信素子として機能させた場合に、検出対象物の位置および距離の測定精度を更に高めることができる。
請求項5の発明によれば、各変換手段間に振動が直接伝達しない程度のごく僅かな隙間だけを設けて各変換手段を並べ、各変換部の長さ,幅,厚みはそれぞれ異なる寸法に設定することで、請求項1の発明の作用・効果を得ることが可能になる。
また、請求項5の発明によれば、各変換手段を2次元配置することにより、各変換手段を受信素子として機能させた場合に、検出対象物の位置および距離の測定精度を更に高めることができる。
(請求項6)
請求項6の発明によれば、各変換手段の受信面または発信面を面一に配置することにより、検出対象物の位置および距離の測定精度を高めることができる。
また、各変換手段を受信素子として機能させた場合には、各受信素子の受信面を面一に配置しないと、各受信素子で受信した超音波のタイミングのずれを補正しなければならず、受信部が生成した電気信号を処理するのに複雑な信号処理回路が必要になる。
それに対して、請求項6の発明によれば、各受信素子(変換手段)で受信した超音波のタイミングのずれを補正する必要がなく、受信部が生成した電気信号を処理する信号処理回路を簡略化できる。
請求項6の発明によれば、各変換手段の受信面または発信面を面一に配置することにより、検出対象物の位置および距離の測定精度を高めることができる。
また、各変換手段を受信素子として機能させた場合には、各受信素子の受信面を面一に配置しないと、各受信素子で受信した超音波のタイミングのずれを補正しなければならず、受信部が生成した電気信号を処理するのに複雑な信号処理回路が必要になる。
それに対して、請求項6の発明によれば、各受信素子(変換手段)で受信した超音波のタイミングのずれを補正する必要がなく、受信部が生成した電気信号を処理する信号処理回路を簡略化できる。
(請求項7)
請求項7の発明によれば、請求項1の作用・効果が確実に得られる。
請求項7の発明によれば、請求項1の作用・効果が確実に得られる。
(請求項8)
請求項8の発明によれば、前記数式における係数nを大きな値に設定するほど、各変換手段を受信素子として機能させた場合に、各受信素子(変換手段)の1次共振周波数の差が大きくなるため、各受信素子が互いの振動によって受ける影響が小さくなり、検出対象物の位置および距離の測定精度を高くできる。
しかし、係数nを大きな値に設定するほど、各受信素子の寸法差が大きくなり、受信部の全体寸法および重量も大きくなる。
従って、係数nの値は、必要な前記測定精度に応じてカット・アンド・トライで実験的に最適値を見つけて設定すればよい。
請求項8の発明によれば、前記数式における係数nを大きな値に設定するほど、各変換手段を受信素子として機能させた場合に、各受信素子(変換手段)の1次共振周波数の差が大きくなるため、各受信素子が互いの振動によって受ける影響が小さくなり、検出対象物の位置および距離の測定精度を高くできる。
しかし、係数nを大きな値に設定するほど、各受信素子の寸法差が大きくなり、受信部の全体寸法および重量も大きくなる。
従って、係数nの値は、必要な前記測定精度に応じてカット・アンド・トライで実験的に最適値を見つけて設定すればよい。
(請求項9)
請求項9の発明のように、係数n=7または係数n=8に設定すれば、請求項1の作用・効果を実用上十分に得られる。
請求項9の発明のように、係数n=7または係数n=8に設定すれば、請求項1の作用・効果を実用上十分に得られる。
(請求項10)
請求項10の発明によれば、請求項1の作用・効果が確実に得られる。
請求項10の発明によれば、請求項1の作用・効果が確実に得られる。
(請求項11)
請求項11の発明によれば、圧電式または静電容量式の超音波センサを得ることができる。
請求項11の発明によれば、圧電式または静電容量式の超音波センサを得ることができる。
以下、本発明を具体化した各実施形態について図面を参照しながら説明する。
尚、各実施形態において、第1実施形態と同一の構成部材については符号を等しくすると共に、同一内容の箇所については重複説明を省略してある。
尚、各実施形態において、第1実施形態と同一の構成部材については符号を等しくすると共に、同一内容の箇所については重複説明を省略してある。
(第1実施形態)
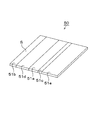
図1は、第1実施形態における超音波センサの受信部10の斜視図である。
受信部10は、5個の受信素子(変換手段)11a〜11eから構成されている。
平板矩形状の各受信素子11a〜11eは、超音波の受信面Sを同一方向に向け、長さ方向の一端部が一直線上に揃えられると共に幅方向にほとんど隙間無く並べられることにより、受信面Sが面一になるように同一平面上にて1次元配置され、その幅Bおよび厚みHは同一で、長さLだけが異なるように形成されている。
図1は、第1実施形態における超音波センサの受信部10の斜視図である。
受信部10は、5個の受信素子(変換手段)11a〜11eから構成されている。
平板矩形状の各受信素子11a〜11eは、超音波の受信面Sを同一方向に向け、長さ方向の一端部が一直線上に揃えられると共に幅方向にほとんど隙間無く並べられることにより、受信面Sが面一になるように同一平面上にて1次元配置され、その幅Bおよび厚みHは同一で、長さLだけが異なるように形成されている。
そして、各受信素子11a〜11eの長さ方向の両端部は、固定部材(図示略)に取り付けられることにより、振動不能に固定されている。
尚、受信部10は、どのような方法で作製してもよく、例えば、別々に作製した各受信素子11a〜11eを組み立ててもよく、MEMS(Micro Electro Mechanical Systems)技術を利用して半導体基板上に一体形成してもよい。
尚、受信部10は、どのような方法で作製してもよく、例えば、別々に作製した各受信素子11a〜11eを組み立ててもよく、MEMS(Micro Electro Mechanical Systems)技術を利用して半導体基板上に一体形成してもよい。
[受信素子の構造]
図2〜図4は、各受信素子11a〜11eの第1〜第3構造例を示す概略縦断面図である。尚、図2〜図4では厚み方向(高さ方向)を誇張して図示してある。
図2〜図4は、各受信素子11a〜11eの第1〜第3構造例を示す概略縦断面図である。尚、図2〜図4では厚み方向(高さ方向)を誇張して図示してある。
<第1構造例>
図2に示す第1構造例において、圧電式の各受信素子11a〜11eは、下部電極21、受信電極22a〜22e、複合圧電体23などから構成されている。
尚、図2では、各受信素子11a,11b,11dおよび各受信電極22a,22b,22dだけを図示してある。
図2に示す第1構造例において、圧電式の各受信素子11a〜11eは、下部電極21、受信電極22a〜22e、複合圧電体23などから構成されている。
尚、図2では、各受信素子11a,11b,11dおよび各受信電極22a,22b,22dだけを図示してある。
平板矩形状の各受信電極22a〜22eは、各受信素子11a〜11e毎に独立して設けられている。
尚、各受信電極22a〜22e間には、隣接する受信電極22a〜22eの振動が直接伝達しない程度のごく僅かな隙間が設けられているだけで、ほとんど隙間無く並べられている。
尚、各受信電極22a〜22e間には、隣接する受信電極22a〜22eの振動が直接伝達しない程度のごく僅かな隙間が設けられているだけで、ほとんど隙間無く並べられている。
各受信電極22a〜22eと平板状の下部電極21とは平行に配置され、各受信電極22a〜22eと下部電極21との間には複合圧電体23が挟設されている。
複合圧電体23は、複数個の柱状の圧電体素子24と、有機高分子層25とから構成されている。
尚、各圧電体素子24は、1個の受信電極22a〜22eだけに接続され、隣接する2個の受信電極22a〜22eには接続されないように配置されている。
複合圧電体23は、複数個の柱状の圧電体素子24と、有機高分子層25とから構成されている。
尚、各圧電体素子24は、1個の受信電極22a〜22eだけに接続され、隣接する2個の受信電極22a〜22eには接続されないように配置されている。
各圧電体素子24は、その上下端部が各受信電極22a〜22eおよび下部電極21にそれぞれ接続されている。
有機高分子層25は、各圧電体素子24の間隙に充填され、各圧電体素子24を互いに結合する。つまり、各圧電体素子24は有機高分子層25中に埋め込まれている。
尚、各圧電体素子24は、強誘電体(例えば、PZTなど)からなる。
また、有機高分子層25は、例えば、シリコンゴム、エポキシ樹脂、ポリウレタン樹脂などからなる。
有機高分子層25は、各圧電体素子24の間隙に充填され、各圧電体素子24を互いに結合する。つまり、各圧電体素子24は有機高分子層25中に埋め込まれている。
尚、各圧電体素子24は、強誘電体(例えば、PZTなど)からなる。
また、有機高分子層25は、例えば、シリコンゴム、エポキシ樹脂、ポリウレタン樹脂などからなる。
そして、積層された受信電極22aと複合圧電体23と下部電極21から受信素子11aが構成され、積層された受信電極22bと複合圧電体23と下部電極21から受信素子11bが構成される、という具合に、複合圧電体23を各受信電極22a〜22eおよび下部電極21で挟設した構造の各受信素子11a〜11eが形成されている。
ここで、受信電極22a〜22eの表面が超音波の受信面Sとなり、超音波により受信電極22a〜22eが振動すると、その振動は複合圧電体23に伝達され、複合圧電体23が振動すると圧電効果により電気信号が生成され、その電気信号は受信電極22a〜22eおよび下部電極22に接続された配線(図示略)を介して出力される。
つまり、第1構造例の各受信素子11a〜11eでは、受信電極22a〜22eと下部電極21および複合圧電体23の積層構造から振動板(受音板)が構成され、その振動板の受信した超音波が電気信号に変換される。
つまり、第1構造例の各受信素子11a〜11eでは、受信電極22a〜22eと下部電極21および複合圧電体23の積層構造から振動板(受音板)が構成され、その振動板の受信した超音波が電気信号に変換される。
<第2構造例>
図3に示す第2構造例において、圧電式の各受信素子11a〜11eは、下部電極21、受信電極22a〜22e、誘電体層31a〜31eなどから構成されている。
尚、図3では、各受信素子11a,11b,11d、各受信電極22a,22b,22d、各誘電体層31a,31b,31dだけを図示してある。
各受信電極22a〜22eと下部電極21との間には、強誘電体(例えば、PZTなど)からなる誘電体層31a〜31eが挟設されている。
図3に示す第2構造例において、圧電式の各受信素子11a〜11eは、下部電極21、受信電極22a〜22e、誘電体層31a〜31eなどから構成されている。
尚、図3では、各受信素子11a,11b,11d、各受信電極22a,22b,22d、各誘電体層31a,31b,31dだけを図示してある。
各受信電極22a〜22eと下部電極21との間には、強誘電体(例えば、PZTなど)からなる誘電体層31a〜31eが挟設されている。
そして、積層された受信電極22aと誘電体層31aと下部電極21から受信素子11aが構成され、積層された受信電極22bと誘電体層31bと下部電極21から受信素子11bが構成される、という具合に、各受信素子11a〜11eが形成されている。
尚、各受信電極22a〜22eおよび各誘電体層31a〜31eの間には、隣接する受信電極22a〜22eおよび誘電体層31a〜31eの振動が直接伝達しない程度のごく僅かな隙間が設けられているだけで、ほとんど隙間無く並べられている。
尚、各受信電極22a〜22eおよび各誘電体層31a〜31eの間には、隣接する受信電極22a〜22eおよび誘電体層31a〜31eの振動が直接伝達しない程度のごく僅かな隙間が設けられているだけで、ほとんど隙間無く並べられている。
ここで、受信電極22a〜22eの表面が超音波の受信面Sとなり、超音波により受信電極22a〜22eが振動すると、その振動は誘電体層31a〜31eに伝達され、誘電体層31a〜31eが振動すると圧電効果により電気信号が生成され、その電気信号は受信電極22a〜22eおよび下部電極22に接続された配線(図示略)を介して出力される。
つまり、第2構造例の各受信素子11a〜11eでは、受信電極22a〜22eと下部電極21および誘電体層31a〜31eの積層構造から振動板(受音板)が構成され、その振動板の受信した超音波が電気信号に変換される。
つまり、第2構造例の各受信素子11a〜11eでは、受信電極22a〜22eと下部電極21および誘電体層31a〜31eの積層構造から振動板(受音板)が構成され、その振動板の受信した超音波が電気信号に変換される。
<第3構造例>
図4に示す第3構造例において、静電容量式(コンデンサ式)の各受信素子11a〜11eは、下部電極21、受信電極22a〜22e、保持部材41などから構成されている。
各受信電極22a〜22eの両端部と下部電極21と間にはそれぞれ保持部材41が挟設され、各受信電極22a〜22eと下部電極21は間隙Kを設けて対向されている。
下部電極21は振動不能に固定されて固定電極を構成し、各受信電極22a〜22eは振動可能で可動電極を構成する。
図4に示す第3構造例において、静電容量式(コンデンサ式)の各受信素子11a〜11eは、下部電極21、受信電極22a〜22e、保持部材41などから構成されている。
各受信電極22a〜22eの両端部と下部電極21と間にはそれぞれ保持部材41が挟設され、各受信電極22a〜22eと下部電極21は間隙Kを設けて対向されている。
下部電極21は振動不能に固定されて固定電極を構成し、各受信電極22a〜22eは振動可能で可動電極を構成する。
そして、受信電極22aと下部電極21から受信素子11aが構成され、受信電極22bと下部電極21から受信素子11bが構成される、という具合に、各受信素子11a〜11eが形成されている。
尚、各受信電極22a〜22e間には、隣接する受信電極22a〜22eの振動が直接伝達しない程度のごく僅かな隙間が設けられているだけで、ほとんど隙間無く並べられている。
尚、各受信電極22a〜22e間には、隣接する受信電極22a〜22eの振動が直接伝達しない程度のごく僅かな隙間が設けられているだけで、ほとんど隙間無く並べられている。
ここで、受信電極22a〜22eの表面が超音波の受信面Sとなり、超音波により受信電極22a〜22eが振動すると、受信電極22a〜22eと下部電極21との距離が変化し、受信電極22a〜22eと下部電極21との間の静電容量も変化する。そこで、配線(図示略)を介して各受信電極22a〜22eおよび下部電極21に接続された変換回路(図示略)を用い、各受信電極22a〜22eと下部電極21との間の静電容量の変化を電気信号に変換する。
つまり、第3構造例の各受信素子11a〜11eでは、受信電極22a〜22eから振動板(受音板)が構成され、その振動板の受信した超音波が電気信号に変換される。
つまり、第3構造例の各受信素子11a〜11eでは、受信電極22a〜22eから振動板(受音板)が構成され、その振動板の受信した超音波が電気信号に変換される。
[第1実施形態の作用・効果]
第1実施形態によれば、以下の作用・効果を得ることができる。
第1実施形態によれば、以下の作用・効果を得ることができる。
[1−1]
受信部10とは別に設けられた超音波センサの発信部(図示略)が、検出対象物に対して超音波を発信し、その超音波が検出対象物に反射した反射音を受信部10の各受信素子11a〜11eで受信する。
受信部10とは別に設けられた超音波センサの発信部(図示略)が、検出対象物に対して超音波を発信し、その超音波が検出対象物に反射した反射音を受信部10の各受信素子11a〜11eで受信する。
そして、受信部10が各受信素子11a〜11eで受信した超音波のタイミングのずれを検出し、その受信した超音波のタイミングのずれと発信部が発射した超音波とを比較することにより、検出対象物の2次元あるいは3次元の位置測定、超音波センサと検出対象物との距離測定などを行うことができる。
尚、超音波センサの発信部には、どのような型式(例えば、圧電式や静電容量式など)を用いてもよい。
尚、超音波センサの発信部には、どのような型式(例えば、圧電式や静電容量式など)を用いてもよい。
[1−2]
図5は、両端が固定された振動板の周波数fと振動の変位xとの関係である共振特性を示す特性図である。
任意の周波数fにおける変位xは、変位の最大値Xmax、1次共振周波数f1、共振値Qから、数式1により求められる。
図5は、両端が固定された振動板の周波数fと振動の変位xとの関係である共振特性を示す特性図である。
任意の周波数fにおける変位xは、変位の最大値Xmax、1次共振周波数f1、共振値Qから、数式1により求められる。

図5に示すように、1次共振周波数f1から±8×f1/Qだけずれた周波数f(=f1±8×f1/Q)における変位xは、変位の最大値Xmaxの1/256になることが数式1で与えられる。
ここで、受信部10を構成する各受信素子11a〜11eは、両端が固定された振動板と見なせるため、各受信素子11a〜11eにも図5および数式1に示す関係が成り立つ。
尚、各受信素子11a〜11eの構造が同じであれば、その共振値Qは同一になる。
尚、各受信素子11a〜11eの構造が同じであれば、その共振値Qは同一になる。
従って、1次共振周波数F1aの受信素子11aに対して、その両隣に並べて配置された受信素子11b,11dの1次共振周波数をそれぞれ周波数F1b,F1d(=F1a±8×F1a/Q)に設定しておけば、各受信素子11a,11b,11dが互いの振動によって受ける影響を1/256にすることができる。
つまり、受信素子11bの1次共振周波数をF1b(=F1a+8×F1a/Q)に設定すればよい。また、受信素子11dの1次共振周波数をF1d(=F1a−8×F1a/Q)に設定すればよい。
つまり、受信素子11bの1次共振周波数をF1b(=F1a+8×F1a/Q)に設定すればよい。また、受信素子11dの1次共振周波数をF1d(=F1a−8×F1a/Q)に設定すればよい。
同様に、受信素子11bの1次共振周波数F1b(=F1a+8×F1a/Q)に対して、受信素子11bに並べて配置された受信素子11cの1次共振周波数をF1c(=F1b+8×F1b/Q)に設定すればよい。
また、受信素子11dの1次共振周波数F1d(=F1a−8×F1a/Q)に対して、受信素子11dに並べて配置された受信素子11eの1次共振周波数をF1e(=F1d−8×F1d/Q)に設定すればよい。
また、受信素子11dの1次共振周波数F1d(=F1a−8×F1a/Q)に対して、受信素子11dに並べて配置された受信素子11eの1次共振周波数をF1e(=F1d−8×F1d/Q)に設定すればよい。
このように、各受信素子11a〜11eの1次共振周波数F1a〜F1eを異なる値に設定すれば、各受信素子11a〜11eが互いの振動によって受ける影響を1/256というほとんど無視できる小さな値にすることが可能になり、各受信素子11a〜11e間における音響的クロストークを低減し、検出対象物の位置および距離の測定精度を高めることができる。
[1−3]
両端が固定された振動板の1次の共振周波数f1は、振動板の長さL、振動板の幅B、振動板の厚み(撓み方向の厚み)Hから、数式2により求められる。
両端が固定された振動板の1次の共振周波数f1は、振動板の長さL、振動板の幅B、振動板の厚み(撓み方向の厚み)Hから、数式2により求められる。
ここで、受信部10を構成する各受信素子11a〜11eは、両端が固定された振動板と見なせるため、各受信素子11a〜11eにも数式2に示す関係が成り立つ。
各受信素子11a〜11eは、幅Bおよび厚みHが同一で、長さLだけが異なるように形成されているため、幅Bおよび厚みHを定数とし、各受信素子11a〜11eの長さをLa〜Leとする。
各受信素子11a〜11eは、幅Bおよび厚みHが同一で、長さLだけが異なるように形成されているため、幅Bおよび厚みHを定数とし、各受信素子11a〜11eの長さをLa〜Leとする。
すると、各受信素子11a〜11eの1次共振周波数F1a〜F1eは、数式2から数式3〜数式7で表される。尚、α=(B×H3)1/2とする。
そして、受信素子11bの1次共振周波数F1b(=F1a+8×F1a/Q)に数式3および数式4を代入すると、数式8が求められる。
また、受信素子11dの1次共振周波数F1d(=F1a−8×F1a/Q)に数式3および数式6を代入すると、数式9が求められる。
また、受信素子11cの1次共振周波数F1c(=F1b+8×F1b/Q)に数式4および数式5を代入し、その求めた数式に数式8を代入すると、数式10が求められる。
また、受信素子11eの1次共振周波数F1e(=F1d−8×F1d/Q)に数式6および数式7を代入し、その求めた数式に数式9を代入すると、数式11が求められる。
また、受信素子11dの1次共振周波数F1d(=F1a−8×F1a/Q)に数式3および数式6を代入すると、数式9が求められる。
また、受信素子11cの1次共振周波数F1c(=F1b+8×F1b/Q)に数式4および数式5を代入し、その求めた数式に数式8を代入すると、数式10が求められる。
また、受信素子11eの1次共振周波数F1e(=F1d−8×F1d/Q)に数式6および数式7を代入し、その求めた数式に数式9を代入すると、数式11が求められる。
そこで、各受信素子11a〜11eの構造によって決定される共振値Qを実測またはシミュレーションにて求め、その共振値Qを数式8〜数式11に代入すれば、受信素子11aの長さLaに対する各受信素子11b〜11eの長さLb〜Leを求めることができる。
例えば、共振値Q=60の場合には、受信素子11aの長さLaに対して、受信素子11bの長さLb=約0.94×La、受信素子11cの長さLb=約0.88×La、受信素子11dの長さLd=約1.07×La、受信素子11eの長さLe=約1.15×Laになる。
例えば、共振値Q=60の場合には、受信素子11aの長さLaに対して、受信素子11bの長さLb=約0.94×La、受信素子11cの長さLb=約0.88×La、受信素子11dの長さLd=約1.07×La、受信素子11eの長さLe=約1.15×Laになる。
[1−4]
前記[1−3]のように各受信素子11a〜11eの長さLa〜Leを異なる値に設定すれば、前記[1−2]の作用・効果を得ることができる。
すなわち、第1実施形態では、各受信素子11a〜11eの共振周波数が一致しないように、各受信素子11a〜11eの長さLa〜Leを不揃いにすることにより、各受信素子11a〜11e間における音響的クロストークを低減し、検出対象物の位置および距離の測定精度を高めることができる。
前記[1−3]のように各受信素子11a〜11eの長さLa〜Leを異なる値に設定すれば、前記[1−2]の作用・効果を得ることができる。
すなわち、第1実施形態では、各受信素子11a〜11eの共振周波数が一致しないように、各受信素子11a〜11eの長さLa〜Leを不揃いにすることにより、各受信素子11a〜11e間における音響的クロストークを低減し、検出対象物の位置および距離の測定精度を高めることができる。
そして、第1実施形態によれば、各受信素子11a〜11eの長さLa〜Leだけを異ならせるだけでよく、受信部10の製造に特別な工程が必要ないため、充填材を充填するための製造工程が必要な特許文献1の技術に比べて、受信部10の製造コストを低減することができる。
また、第1実施形態によれば、各受信素子11a〜11eの長さLa〜Leだけを異ならせるだけでよく、各受信素子11a〜11e間には振動が直接伝達しない程度のごく僅かな隙間だけを設ければよいため、充填材の体積分および重量分だけ全体寸法および重量が大きくなる特許文献1の技術に比べて、受信部10を小型・軽量化することができる。
[1−5]
図6は、第1実施形態の第1変形例を示す斜視図である。
図1に示す例では、各受信素子11a〜11eを長さ方向の一端部が一直線上に揃えられるように配置している。しかし、図6に示す第1変形例のように、各受信素子11a〜11eの両端部を揃えることなく適宜並べて配置してもよい。
図6は、第1実施形態の第1変形例を示す斜視図である。
図1に示す例では、各受信素子11a〜11eを長さ方向の一端部が一直線上に揃えられるように配置している。しかし、図6に示す第1変形例のように、各受信素子11a〜11eの両端部を揃えることなく適宜並べて配置してもよい。
図7は、第1実施形態の第2変形例を示す斜視図である。
図1に示す例では、各受信素子11a〜11eを長さLの順番に並べて配置している。しかし、図7に示す第2変形例のように、各受信素子11a〜11eを長さLに関係なく適宜並べて配置してもよい。
図1に示す例では、各受信素子11a〜11eを長さLの順番に並べて配置している。しかし、図7に示す第2変形例のように、各受信素子11a〜11eを長さLに関係なく適宜並べて配置してもよい。
各受信素子11a〜11e間における振動伝達が完全に遮断される場合には、図1に示す例と第1変形例または第2変形例とにおける音響的クロストークの低減効果は同じである。
しかし、実際には、各受信素子11a〜11e間における振動伝達を完全に遮断することはできないため、その振動伝達により、図1に示す例と第1変形例または第2変形例とにおける音響的クロストークの低減効果には若干の違いが生じる。
しかし、実際には、各受信素子11a〜11e間における振動伝達を完全に遮断することはできないため、その振動伝達により、図1に示す例と第1変形例または第2変形例とにおける音響的クロストークの低減効果には若干の違いが生じる。
(第2実施形態)
図8は、第2実施形態における超音波センサの受信部50の斜視図である。
受信部50は、5個の受信素子(変換手段)51a〜51eから構成されている。
平板矩形状の各受信素子51a〜51eは、超音波の受信面Sを同一方向に向け、長さ方向の両端部がそれぞれ一直線上に揃えられると共に幅方向にほとんど隙間無く並べられることにより、受信面Sが面一になるように同一平面上にて1次元配置され、その長さLおよび厚みHは同一で、幅Bだけが異なるように形成されている。
図8は、第2実施形態における超音波センサの受信部50の斜視図である。
受信部50は、5個の受信素子(変換手段)51a〜51eから構成されている。
平板矩形状の各受信素子51a〜51eは、超音波の受信面Sを同一方向に向け、長さ方向の両端部がそれぞれ一直線上に揃えられると共に幅方向にほとんど隙間無く並べられることにより、受信面Sが面一になるように同一平面上にて1次元配置され、その長さLおよび厚みHは同一で、幅Bだけが異なるように形成されている。
そして、各受信素子51a〜51eの長さ方向の両端部は、固定部材(図示略)に取り付けられることにより、振動不能に固定されている。
尚、受信部50は、どのような方法で作製してもよく、例えば、別々に作製した各受信素子51a〜51eを組み立ててもよく、MEMS技術を利用して半導体基板上に一体形成してもよい。
各受信素子51a〜51eの構造は、第1実施形態の各受信素子11a〜11eと同じである。
尚、受信部50は、どのような方法で作製してもよく、例えば、別々に作製した各受信素子51a〜51eを組み立ててもよく、MEMS技術を利用して半導体基板上に一体形成してもよい。
各受信素子51a〜51eの構造は、第1実施形態の各受信素子11a〜11eと同じである。
[第2実施形態の作用・効果]
第2実施形態によれば、第1実施形態の前記[1−1]と同様の作用・効果が得られることに加え、以下の作用・効果を得ることができる。
第2実施形態によれば、第1実施形態の前記[1−1]と同様の作用・効果が得られることに加え、以下の作用・効果を得ることができる。
[2−1]
第1実施形態の前記[1−2]と同様に、受信部50を構成する各受信素子51a〜51eは、両端が固定された振動板と見なせるため、各受信素子51a〜51eにも図5および数式1に示す関係が成り立つ。
第1実施形態の前記[1−2]と同様に、受信部50を構成する各受信素子51a〜51eは、両端が固定された振動板と見なせるため、各受信素子51a〜51eにも図5および数式1に示す関係が成り立つ。
従って、1次共振周波数F5aの受信素子51aに対して、その両隣に並べて配置された受信素子51b,51dの1次共振周波数をそれぞれ周波数F5b,F5d(=F5a±8×F5a/Q)に設定しておけば、各受信素子51a,51b,51dが互いの振動によって受ける影響を1/256にすることができる。
つまり、受信素子51bの1次共振周波数をF5b(=F5a+8×F5a/Q)に設定すればよい。また、受信素子51dの1次共振周波数をF5d(=F5a−8×F5a/Q)に設定すればよい。
つまり、受信素子51bの1次共振周波数をF5b(=F5a+8×F5a/Q)に設定すればよい。また、受信素子51dの1次共振周波数をF5d(=F5a−8×F5a/Q)に設定すればよい。
同様に、受信素子51bの1次共振周波数F5b(=F5a+8×F5a/Q)に対して、受信素子51bに並べて配置された受信素子51cの1次共振周波数をF5c(=F5b+8×F5b/Q)に設定すればよい。
また、受信素子51dの1次共振周波数F5d(=F5a−8×F5a/Q)に対して、受信素子51dに並べて配置された受信素子51eの1次共振周波数をF5e(=F5d−8×F5d/Q)に設定すればよい。
また、受信素子51dの1次共振周波数F5d(=F5a−8×F5a/Q)に対して、受信素子51dに並べて配置された受信素子51eの1次共振周波数をF5e(=F5d−8×F5d/Q)に設定すればよい。
このように、各受信素子51a〜51eの1次共振周波数F5a〜F5eを異なる値に設定すれば、各受信素子51a〜51eが互いの振動によって受ける影響を1/256というほとんど無視できる小さな値にすることが可能になり、各受信素子51a〜51e間における音響的クロストークを低減し、検出対象物の位置および距離の測定精度を高めることができる。
[2−2]
第1実施形態の前記[1−3]と同様に、受信部50を構成する各受信素子51a〜51eは、両端が固定された振動板と見なせるため、各受信素子51a〜51eにも数式2に示す関係が成り立つ。
各受信素子51a〜51eは、長さLおよび厚みHが同一で、幅Bだけが異なるように形成されているため、長さLおよび厚みHを定数とし、各受信素子51a〜51eの幅をBa〜Beとする。
第1実施形態の前記[1−3]と同様に、受信部50を構成する各受信素子51a〜51eは、両端が固定された振動板と見なせるため、各受信素子51a〜51eにも数式2に示す関係が成り立つ。
各受信素子51a〜51eは、長さLおよび厚みHが同一で、幅Bだけが異なるように形成されているため、長さLおよび厚みHを定数とし、各受信素子51a〜51eの幅をBa〜Beとする。
すると、各受信素子51a〜51eの1次共振周波数F5a〜F5eは、数式2から数式12〜数式16で表される。尚、β=H3/2/L2とする。
そして、受信素子51bの1次共振周波数F5b(=F5a+8×F5a/Q)に数式12および数式13を代入すると、数式17が求められる。
また、受信素子51dの1次共振周波数F5d(=F5a−8×F5a/Q)に数式12および数式15を代入すると、数式18が求められる。
また、受信素子51cの1次共振周波数F5c(=F5b+8×F5b/Q)に数式13および数式14を代入し、その求めた数式に数式17を代入すると、数式19が求められる。
また、受信素子51eの1次共振周波数F5e(=F5d−8×F5d/Q)に数式15および数式16を代入し、その求めた数式に数式18を代入すると、数式20が求められる。
また、受信素子51dの1次共振周波数F5d(=F5a−8×F5a/Q)に数式12および数式15を代入すると、数式18が求められる。
また、受信素子51cの1次共振周波数F5c(=F5b+8×F5b/Q)に数式13および数式14を代入し、その求めた数式に数式17を代入すると、数式19が求められる。
また、受信素子51eの1次共振周波数F5e(=F5d−8×F5d/Q)に数式15および数式16を代入し、その求めた数式に数式18を代入すると、数式20が求められる。
そこで、各受信素子51a〜51eの構造によって決定される共振値Qを実測またはシミュレーションにて求め、その共振値Qを数式17〜数式20に代入すれば、受信素子51aの幅Baに対する各受信素子51b〜51eの幅Bb〜Beを求めることができる。
例えば、共振値Q=60の場合には、受信素子51aの幅Baに対して、受信素子51bの幅Bb=約0.75×Ba、受信素子51cの幅Bb=約0.56×Ba、受信素子51dの幅Bd=約1.28×Ba、受信素子51eの幅Be=約1.65×Baになる。
例えば、共振値Q=60の場合には、受信素子51aの幅Baに対して、受信素子51bの幅Bb=約0.75×Ba、受信素子51cの幅Bb=約0.56×Ba、受信素子51dの幅Bd=約1.28×Ba、受信素子51eの幅Be=約1.65×Baになる。
[2−3]
前記[2−2]のように各受信素子51a〜51eの幅Ba〜Beを異なる値に設定すれば、前記[2−1]の作用・効果を得ることができる。
すなわち、第2実施形態では、各受信素子51a〜51eの共振周波数が一致しないように、各受信素子51a〜51eの幅Ba〜Beを不揃いにすることにより、各受信素子51a〜51e間における音響的クロストークを低減し、検出対象物の位置および距離の測定精度を高めることができる。
前記[2−2]のように各受信素子51a〜51eの幅Ba〜Beを異なる値に設定すれば、前記[2−1]の作用・効果を得ることができる。
すなわち、第2実施形態では、各受信素子51a〜51eの共振周波数が一致しないように、各受信素子51a〜51eの幅Ba〜Beを不揃いにすることにより、各受信素子51a〜51e間における音響的クロストークを低減し、検出対象物の位置および距離の測定精度を高めることができる。
そして、第2実施形態によれば、各受信素子51a〜51eの幅Ba〜Beだけを異ならせるだけでよく、受信部50の製造に特別な工程が必要ないため、充填材を充填するための製造工程が必要な特許文献1の技術に比べて、受信部50の製造コストを低減することができる。
また、第2実施形態によれば、各受信素子51a〜51eの幅Ba〜Beだけを異ならせるだけでよく、各受信素子51a〜51e間には振動が直接伝達しない程度のごく僅かな隙間だけを設ければよいため、充填材の体積分および重量分だけ全体寸法および重量が大きくなる特許文献1の技術に比べて、受信部50を小型・軽量化することができる。
さらに、第2実施形態では、受信部50の全体形状が平板矩形状になるため、第1実施形態に比べて、各受信素子51a〜51eの長さ方向の両端部の固定構造を単純化することが可能になり、受信部50の作製が容易になることから、受信部50の製造コストを更に低減することができる。
[2−4]
図9は、第2実施形態の変形例を示す斜視図である。
図8に示す例では、各受信素子51a〜51eを幅Bの順番に並べて配置している。しかし、図9に示す変形例のように、各受信素子51a〜51eを幅Bに関係なく適宜並べて配置してもよい。
図9は、第2実施形態の変形例を示す斜視図である。
図8に示す例では、各受信素子51a〜51eを幅Bの順番に並べて配置している。しかし、図9に示す変形例のように、各受信素子51a〜51eを幅Bに関係なく適宜並べて配置してもよい。
各受信素子51a〜51e間における振動伝達が完全に遮断される場合には、図8に示す例と図9に示す変形例とにおける音響的クロストークの低減効果は同じである。
しかし、実際には、各受信素子51a〜51e間における振動伝達を完全に遮断することはできないため、その振動伝達により、図8に示す例と図9に示す変形例とにおける音響的クロストークの低減効果には若干の違いが生じる。
しかし、実際には、各受信素子51a〜51e間における振動伝達を完全に遮断することはできないため、その振動伝達により、図8に示す例と図9に示す変形例とにおける音響的クロストークの低減効果には若干の違いが生じる。
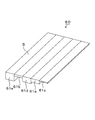
(第3実施形態)
図10は、第3実施形態における超音波センサの受信部60の斜視図である。
受信部60は、5個の受信素子(変換手段)61a〜61eから構成されている。
平板矩形状の各受信素子61a〜61eは、超音波の受信面Sを同一方向に向け、長さ方向の両端部がそれぞれ一直線上に揃えられると共に幅方向にほとんど隙間無く並べられることにより、受信面Sが面一になるように同一平面上にて1次元配置され、その長さLおよび幅Bは同一で、厚みHだけが異なるように形成されている。
図10は、第3実施形態における超音波センサの受信部60の斜視図である。
受信部60は、5個の受信素子(変換手段)61a〜61eから構成されている。
平板矩形状の各受信素子61a〜61eは、超音波の受信面Sを同一方向に向け、長さ方向の両端部がそれぞれ一直線上に揃えられると共に幅方向にほとんど隙間無く並べられることにより、受信面Sが面一になるように同一平面上にて1次元配置され、その長さLおよび幅Bは同一で、厚みHだけが異なるように形成されている。
そして、各受信素子61a〜61eの長さ方向の両端部は、固定部材(図示略)に取り付けられることにより、振動不能に固定されている。
尚、受信部60は、どのような方法で作製してもよく、例えば、別々に作製した各受信素子61a〜61eを組み立ててもよく、MEMS技術を利用して半導体基板上に一体形成してもよい。
各受信素子61a〜61eの構造は、第1実施形態の各受信素子11a〜11eと同じである。
尚、受信部60は、どのような方法で作製してもよく、例えば、別々に作製した各受信素子61a〜61eを組み立ててもよく、MEMS技術を利用して半導体基板上に一体形成してもよい。
各受信素子61a〜61eの構造は、第1実施形態の各受信素子11a〜11eと同じである。
[第3実施形態の作用・効果]
第3実施形態によれば、第1実施形態の前記[1−1]と同様の作用・効果が得られることに加え、以下の作用・効果を得ることができる。
第3実施形態によれば、第1実施形態の前記[1−1]と同様の作用・効果が得られることに加え、以下の作用・効果を得ることができる。
[3−1]
第1実施形態の前記[1−2]と同様に、受信部60を構成する各受信素子61a〜61eは、両端が固定された振動板と見なせるため、各受信素子61a〜61eにも図5および数式1に示す関係が成り立つ。
第1実施形態の前記[1−2]と同様に、受信部60を構成する各受信素子61a〜61eは、両端が固定された振動板と見なせるため、各受信素子61a〜61eにも図5および数式1に示す関係が成り立つ。
従って、1次共振周波数F6aの受信素子61aに対して、その両隣に並べて配置された受信素子61b,61dの1次共振周波数をそれぞれ周波数F6b,F6d(=F6a±8×F6a/Q)に設定しておけば、各受信素子61a,61b,61dが互いの振動によって受ける影響を1/256にすることができる。
つまり、受信素子61bの1次共振周波数をF6b(=F6a+8×F6a/Q)に設定すればよい。また、受信素子61dの1次共振周波数をF6d(=F6a−8×F6a/Q)に設定すればよい。
つまり、受信素子61bの1次共振周波数をF6b(=F6a+8×F6a/Q)に設定すればよい。また、受信素子61dの1次共振周波数をF6d(=F6a−8×F6a/Q)に設定すればよい。
同様に、受信素子61bの1次共振周波数F6b(=F6a+8×F6a/Q)に対して、受信素子61bに並べて配置された受信素子61cの1次共振周波数をF6c(=F6b+8×F6b/Q)に設定すればよい。
また、受信素子61dの1次共振周波数F6d(=F6a−8×F6a/Q)に対して、受信素子61dに並べて配置された受信素子61eの1次共振周波数をF6e(=F6d−8×F6d/Q)に設定すればよい。
また、受信素子61dの1次共振周波数F6d(=F6a−8×F6a/Q)に対して、受信素子61dに並べて配置された受信素子61eの1次共振周波数をF6e(=F6d−8×F6d/Q)に設定すればよい。
このように、各受信素子61a〜61eの1次共振周波数F6a〜F6eを異なる値に設定すれば、各受信素子61a〜61eが互いの振動によって受ける影響を1/256というほとんど無視できる小さな値にすることが可能になり、各受信素子61a〜61e間における音響的クロストークを低減し、検出対象物の位置および距離の測定精度を高めることができる。
[3−2]
第1実施形態の前記[1−3]と同様に、受信部60を構成する各受信素子61a〜61eは、両端が固定された振動板と見なせるため、各受信素子61a〜61eにも数式2に示す関係が成り立つ。
各受信素子61a〜61eは、長さLおよび幅Bが同一で、厚みHだけが異なるように形成されているため、長さLおよび幅Bを定数とし、各受信素子61a〜61eの厚みをHa〜Heとする。
第1実施形態の前記[1−3]と同様に、受信部60を構成する各受信素子61a〜61eは、両端が固定された振動板と見なせるため、各受信素子61a〜61eにも数式2に示す関係が成り立つ。
各受信素子61a〜61eは、長さLおよび幅Bが同一で、厚みHだけが異なるように形成されているため、長さLおよび幅Bを定数とし、各受信素子61a〜61eの厚みをHa〜Heとする。
すると、各受信素子61a〜61eの1次共振周波数F6a〜F6eは、数式2から数式21〜数式25で表される。尚、γ=B1/2/L2とする。
そして、受信素子61bの1次共振周波数F6b(=F6a+8×F6a/Q)に数式21および数式22を代入すると、数式26が求められる。
また、受信素子61dの1次共振周波数F6d(=F6a−8×F6a/Q)に数式21および数式24を代入すると、数式27が求められる。
また、受信素子61cの1次共振周波数F6c(=F6b+8×F6b/Q)に数式22および数式23を代入し、その求めた数式に数式26を代入すると、数式28が求められる。
また、受信素子61eの1次共振周波数F6e(=F6d−8×F6d/Q)に数式24および数式25を代入し、その求めた数式に数式27を代入すると、数式29が求められる。
また、受信素子61dの1次共振周波数F6d(=F6a−8×F6a/Q)に数式21および数式24を代入すると、数式27が求められる。
また、受信素子61cの1次共振周波数F6c(=F6b+8×F6b/Q)に数式22および数式23を代入し、その求めた数式に数式26を代入すると、数式28が求められる。
また、受信素子61eの1次共振周波数F6e(=F6d−8×F6d/Q)に数式24および数式25を代入し、その求めた数式に数式27を代入すると、数式29が求められる。
そこで、各受信素子61a〜61eの構造によって決定される共振値Qを実測またはシミュレーションにて求め、その共振値Qを数式26〜数式29に代入すれば、受信素子61aの厚みHaに対する各受信素子61b〜61eの厚みHb〜Beを求めることができる。
例えば、共振値Q=60の場合には、受信素子61aの厚みHaに対して、受信素子61bの厚みHb=約0.91×Ha、受信素子61cの厚みHb=約0.83×Ha、受信素子61dの厚みHd=約1.09×Ha、受信素子61eの厚みHe=約1.18×Haになる。
例えば、共振値Q=60の場合には、受信素子61aの厚みHaに対して、受信素子61bの厚みHb=約0.91×Ha、受信素子61cの厚みHb=約0.83×Ha、受信素子61dの厚みHd=約1.09×Ha、受信素子61eの厚みHe=約1.18×Haになる。
[3−3]
前記[3−2]のように各受信素子61a〜61eの厚みHa〜Heを異なる値に設定すれば、前記[3−1]の作用・効果を得ることができる。
すなわち、第3実施形態では、各受信素子61a〜61eの共振周波数が一致しないように、各受信素子61a〜61eの厚みHa〜Heを不揃いにすることにより、各受信素子61a〜61e間における音響的クロストークを低減し、検出対象物の位置および距離の測定精度を高めることができる。
前記[3−2]のように各受信素子61a〜61eの厚みHa〜Heを異なる値に設定すれば、前記[3−1]の作用・効果を得ることができる。
すなわち、第3実施形態では、各受信素子61a〜61eの共振周波数が一致しないように、各受信素子61a〜61eの厚みHa〜Heを不揃いにすることにより、各受信素子61a〜61e間における音響的クロストークを低減し、検出対象物の位置および距離の測定精度を高めることができる。
そして、第3実施形態によれば、各受信素子61a〜61eの厚みHa〜Heだけを異ならせるだけでよく、受信部60の製造に特別な工程が必要ないため、充填材を充填するための製造工程が必要な特許文献1の技術に比べて、受信部60の製造コストを低減することができる。
また、第3実施形態によれば、各受信素子61a〜61eの厚みHa〜Heだけを異ならせるだけでよく、各受信素子61a〜61e間には振動が直接伝達しない程度のごく僅かな隙間だけを設ければよいため、充填材の体積分および重量分だけ全体寸法および重量が大きくなる特許文献1の技術に比べて、受信部60を小型・軽量化することができる。
さらに、第3実施形態では、第2実施形態と同様に、受信部60の全体形状が平板矩形状になるため、第1実施形態に比べて、各受信素子61a〜61eの長さ方向の両端部の固定構造を単純化することが可能になり、受信部60の作製が容易になることから、受信部60の製造コストを更に低減することができる。
そして、第3実施形態では、第2実施形態に比べて、受信部60の幅が小さくなり、受信部60を上方から見た平面寸法が小さくなるため、受信部60をパッケージ(図示略)に収容した場合の体積を小さくすることが可能になり、受信部60を更に小型・軽量化することができる。
[3−4]
図11は、第3実施形態の第1変形例を示す斜視図である。
図12は、第3実施形態の第2変形例を示す斜視図である。
図10に示す例では、各受信素子61a〜61eの受信面Sが面一になるように配置されている。
しかし、図11に示す第1変形例のように、各受信素子61a〜61eの受信面Sの裏面が面一になるように配置してもよい。
また、図12に示す第2変形例のように、各受信素子61a〜61eの受信面Sおよびその裏面の両方を面一にすることなく適宜並べて配置してもよい。
図11は、第3実施形態の第1変形例を示す斜視図である。
図12は、第3実施形態の第2変形例を示す斜視図である。
図10に示す例では、各受信素子61a〜61eの受信面Sが面一になるように配置されている。
しかし、図11に示す第1変形例のように、各受信素子61a〜61eの受信面Sの裏面が面一になるように配置してもよい。
また、図12に示す第2変形例のように、各受信素子61a〜61eの受信面Sおよびその裏面の両方を面一にすることなく適宜並べて配置してもよい。
但し、各受信素子61a〜61eの受信面Sを面一にした方が、検出対象物の位置および距離の測定精度を高めることができる。また、第1変形例または第2変形例のように、各受信素子61a〜61eの受信面Sが面一になっていない場合には、各受信素子61a〜61eで受信した超音波のタイミングのずれを補正しなければならず、受信部60が生成した電気信号を処理するのに複雑な信号処理回路が必要になる。
それに対して、各受信素子61a〜61eの受信面Sを面一にすれば、各受信素子61a〜61eで受信した超音波のタイミングのずれを補正する必要がなく、受信部60が生成した電気信号を処理する信号処理回路を簡略化できる。
それに対して、各受信素子61a〜61eの受信面Sを面一にすれば、各受信素子61a〜61eで受信した超音波のタイミングのずれを補正する必要がなく、受信部60が生成した電気信号を処理する信号処理回路を簡略化できる。
[3−5]
図13は、第3実施形態の第3変形例を示す斜視図である。
図10に示す例では、各受信素子61a〜61eを厚みHの順番に並べて配置している。しかし、図13に示す第3変形例のように、各受信素子61a〜61eを厚みHに関係なく適宜並べて配置してもよい。
図13は、第3実施形態の第3変形例を示す斜視図である。
図10に示す例では、各受信素子61a〜61eを厚みHの順番に並べて配置している。しかし、図13に示す第3変形例のように、各受信素子61a〜61eを厚みHに関係なく適宜並べて配置してもよい。
各受信素子61a〜61e間における振動伝達が完全に遮断される場合には、図10に示す例と第3変形例とにおける音響的クロストークの低減効果は同じである。
しかし、実際には、各受信素子61a〜61e間における振動伝達を完全に遮断することはできないため、その振動伝達により、図10に示す例と第3変形例とにおける音響的クロストークの低減効果には若干の違いが生じる。
しかし、実際には、各受信素子61a〜61e間における振動伝達を完全に遮断することはできないため、その振動伝達により、図10に示す例と第3変形例とにおける音響的クロストークの低減効果には若干の違いが生じる。
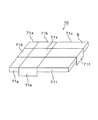
(第4実施形態)
図14は、第4実施形態における超音波センサの受信部70の斜視図である。
受信部70は、9個の受信素子(変換手段)71a〜71iから構成されている。
平板矩形状の各受信素子71a〜71iは、超音波の受信面Sを同一方向に向け、ほとんど隙間無く並べられることにより、受信面Sが面一になるように同一平面上にて縦横方向に2次元配置され、その長さ,幅,厚みはそれぞれ異なる寸法に形成されている。
図14は、第4実施形態における超音波センサの受信部70の斜視図である。
受信部70は、9個の受信素子(変換手段)71a〜71iから構成されている。
平板矩形状の各受信素子71a〜71iは、超音波の受信面Sを同一方向に向け、ほとんど隙間無く並べられることにより、受信面Sが面一になるように同一平面上にて縦横方向に2次元配置され、その長さ,幅,厚みはそれぞれ異なる寸法に形成されている。
そして、各受信素子71a〜71iの長さ方向または幅方向の両端部は、固定部材(図示略)に取り付けられることにより、振動不能に固定されている。
尚、受信部70は、どのような方法で作製してもよく、例えば、別々に作製した各受信素子71a〜71iを組み立ててもよく、MEMS技術を利用して半導体基板上に一体形成してもよい。
各受信素子71a〜71iの構造は、第1実施形態の各受信素子11a〜11eと同じである。
尚、受信部70は、どのような方法で作製してもよく、例えば、別々に作製した各受信素子71a〜71iを組み立ててもよく、MEMS技術を利用して半導体基板上に一体形成してもよい。
各受信素子71a〜71iの構造は、第1実施形態の各受信素子11a〜11eと同じである。
[第4実施形態の作用・効果]
第4実施形態において、各受信素子71a〜71iの1次共振周波数が異なる値になるように、その長さ,幅,厚みを第1〜第3実施形態と同様に適宜設定すれば、第1実施形態の前記[1−1]〜[1−4]と同様の作用・効果が得られる。
加えて、第4実施形態によれば、各受信素子71a〜71iを2次元配置することにより、検出対象物の位置および距離の測定精度を更に高めることができる。
第4実施形態において、各受信素子71a〜71iの1次共振周波数が異なる値になるように、その長さ,幅,厚みを第1〜第3実施形態と同様に適宜設定すれば、第1実施形態の前記[1−1]〜[1−4]と同様の作用・効果が得られる。
加えて、第4実施形態によれば、各受信素子71a〜71iを2次元配置することにより、検出対象物の位置および距離の測定精度を更に高めることができる。
[別の実施形態]
ところで、本発明は上記各実施形態に限定されるものではなく、以下のように具体化してもよく、その場合でも、上記各実施形態と同等もしくはそれ以上の作用・効果を得ることができる。
ところで、本発明は上記各実施形態に限定されるものではなく、以下のように具体化してもよく、その場合でも、上記各実施形態と同等もしくはそれ以上の作用・効果を得ることができる。
[別例1]
第1〜第3実施形態の受信部10,50,60は5個の受信素子11a〜11e,51a〜51e,61a〜61eから構成され、第4実施形態の受信部70は9個の受信素子71a〜71eから構成されているが、受信部を構成する受信素子の個数は検出対象物の位置および距離の測定精度に対応し、受信素子の個数を増やすほど当該精度を高くすることができる。
そのため、受信素子の個数および配置間隔は、必要な前記測定精度に応じてカット・アンド・トライで実験的に最適値を見つけて設定すればよい。
第1〜第3実施形態の受信部10,50,60は5個の受信素子11a〜11e,51a〜51e,61a〜61eから構成され、第4実施形態の受信部70は9個の受信素子71a〜71eから構成されているが、受信部を構成する受信素子の個数は検出対象物の位置および距離の測定精度に対応し、受信素子の個数を増やすほど当該精度を高くすることができる。
そのため、受信素子の個数および配置間隔は、必要な前記測定精度に応じてカット・アンド・トライで実験的に最適値を見つけて設定すればよい。
[別例2]
数式1より、図5に示す1次共振周波数f1から±7×f1/Qだけずれた周波数f(=f1±7×f1/Q)における変位xは、変位の最大値Xmaxの約1/100になる。
数式1より、図5に示す1次共振周波数f1から±7×f1/Qだけずれた周波数f(=f1±7×f1/Q)における変位xは、変位の最大値Xmaxの約1/100になる。
従って、第1実施形態において、1次共振周波数F1aの受信素子11aに対して、その両隣に並べて配置された受信素子11b,11dの1次共振周波数をそれぞれ周波数F1b,F1d(=F1a±7×F1a/Q)に設定しておけば、各受信素子11a,11b,11dが互いの振動によって受ける影響を約1/100にすることができる。
つまり、受信素子11bの1次共振周波数をF1b(=F1a+7×F1a/Q)に設定すればよい。また、受信素子11dの1次共振周波数をF1d(=F1a−7×F1a/Q)に設定すればよい。
つまり、受信素子11bの1次共振周波数をF1b(=F1a+7×F1a/Q)に設定すればよい。また、受信素子11dの1次共振周波数をF1d(=F1a−7×F1a/Q)に設定すればよい。
同様に、受信素子11bの1次共振周波数F1b(=F1a+7×F1a/Q)に対して、受信素子11bに並べて配置された受信素子11cの1次共振周波数をF1c(=F1b+7×F1b/Q)に設定すればよい。
また、受信素子11dの1次共振周波数F1d(=F1a−7×F1a/Q)に対して、受信素子11dに並べて配置された受信素子11eの1次共振周波数をF1e(=F1d−7×F1d/Q)に設定すればよい。
また、受信素子11dの1次共振周波数F1d(=F1a−7×F1a/Q)に対して、受信素子11dに並べて配置された受信素子11eの1次共振周波数をF1e(=F1d−7×F1d/Q)に設定すればよい。
このように、各受信素子11a〜11eの1次共振周波数F1a〜F1eを異なる値に設定すれば、各受信素子11a〜11eが互いの振動によって受ける影響を約1/100というほとんど無視できる小さな値にすることが可能になり、第1実施形態の1/256には劣るものの、ほぼ同等の効果を得ることができる。
すなわち、数式30における係数nを大きな値に設定するほど、各受信素子11a〜11eの1次共振周波数F1a〜F1eの差が大きくなるため、各受信素子11a〜11eが互いの振動によって受ける影響が小さくなり、検出対象物の位置および距離の測定精度を高くできる。
しかし、数式30における係数nを大きな値に設定するほど、各受信素子11a〜11eの長さLの差が大きくなり、受信部10の全体寸法および重量も大きくなる。
しかし、数式30における係数nを大きな値に設定するほど、各受信素子11a〜11eの長さLの差が大きくなり、受信部10の全体寸法および重量も大きくなる。
従って、係数nの値は、必要な前記測定精度に応じてカット・アンド・トライで実験的に最適値を見つけて設定すればよいが、第1実施形態および前記例のように、n=8またはn=7に設定すれば実用上十分な効果が得られる。
f=f1±n×f1/Q ………(数式30)
尚、第2〜第4実施形態においても、第1実施形態と同様に、係数nの値は必要な前記測定精度に応じて適宜設定すればよいが、n=8またはn=7に設定すれば実用上十分な効果が得られる。
[別例3]
第1〜第3実施形態の受信部10,50,60を構成する受信素子11a〜11e,51a〜51e,61a〜61eは、長さ方向の両端部が振動不能に固定されている。
しかし、各受信素子11a〜11e,51a〜51e,61a〜61eの長さ方向の一端部のみを振動不能に固定してもよい。
また、第4実施形態の受信部70を構成する受信素子71a〜71iは、長さ方向または幅方向の両端部が振動不能に固定されている。
しかし、各受信素子71a〜71iの長さ方向または幅方向の一端部のみを振動不能に固定してもよい。
第1〜第3実施形態の受信部10,50,60を構成する受信素子11a〜11e,51a〜51e,61a〜61eは、長さ方向の両端部が振動不能に固定されている。
しかし、各受信素子11a〜11e,51a〜51e,61a〜61eの長さ方向の一端部のみを振動不能に固定してもよい。
また、第4実施形態の受信部70を構成する受信素子71a〜71iは、長さ方向または幅方向の両端部が振動不能に固定されている。
しかし、各受信素子71a〜71iの長さ方向または幅方向の一端部のみを振動不能に固定してもよい。
[別例4]
第1,第2,第4実施形態の受信部10,50,70を構成する各受信素子11a〜11e,51a〜51e,61a〜61e,71a〜71iは、受信面Sが面一になるように配置されている。
しかし、受信部10,50,70を構成する各受信素子についても、第3実施形態の第1変形例(図11)または第2変形例(図12)と同様に、受信面Sを面一にすることなく適宜並べて配置してもよい。
第1,第2,第4実施形態の受信部10,50,70を構成する各受信素子11a〜11e,51a〜51e,61a〜61e,71a〜71iは、受信面Sが面一になるように配置されている。
しかし、受信部10,50,70を構成する各受信素子についても、第3実施形態の第1変形例(図11)または第2変形例(図12)と同様に、受信面Sを面一にすることなく適宜並べて配置してもよい。
[別例5]
上記各実施形態は超音波センサの受信部に適用したものであるが、本発明は電気信号を超音波に変換して発信する超音波センサの発信部に適用してもよい。
すなわち、受信部10,50,60,70の各受信素子11a〜11e,51a〜51e,61a〜61e,71a〜71iを、発信部の各発信素子(変換手段)として機能させてもよい。この場合、各受信素子の受信面Sは、発信素子から超音波を発信する発信面となる。
上記各実施形態は超音波センサの受信部に適用したものであるが、本発明は電気信号を超音波に変換して発信する超音波センサの発信部に適用してもよい。
すなわち、受信部10,50,60,70の各受信素子11a〜11e,51a〜51e,61a〜61e,71a〜71iを、発信部の各発信素子(変換手段)として機能させてもよい。この場合、各受信素子の受信面Sは、発信素子から超音波を発信する発信面となる。
例えば、各発信素子を図2に示す第1構造例(圧電式)にした場合には、下部電極21と電極22a〜22eとに印加される電気信号に応じて、複合圧電体23が圧電効果により振動して電極22a〜22eから超音波が発信する。
また、各発信素子を図3に示す第2構造例(圧電式)にした場合には、下部電極21と電極22a〜22eとに印加される電気信号に応じて、誘電体層31が圧電効果により振動して電極22a〜22eから超音波が発信する。
また、各発信素子を図4に示す第3構造例(コンデンサ式)にした場合には、下部電極21と電極22a〜22eとに印加される電気信号に応じて、下部電極21と電極22a〜22eとの間に静電引力が発生し、その静電引力により電極22a〜22eが振動して超音波が発生する。
また、各発信素子を図3に示す第2構造例(圧電式)にした場合には、下部電極21と電極22a〜22eとに印加される電気信号に応じて、誘電体層31が圧電効果により振動して電極22a〜22eから超音波が発信する。
また、各発信素子を図4に示す第3構造例(コンデンサ式)にした場合には、下部電極21と電極22a〜22eとに印加される電気信号に応じて、下部電極21と電極22a〜22eとの間に静電引力が発生し、その静電引力により電極22a〜22eが振動して超音波が発生する。
このように、受信部の各受信素子を発信部の各発信素子として機能させた場合には、各発信素子の1次共振周波数が異なる値に設定されているため、各発信素子から発信される超音波を和音にすることができる。
10,50,60,70…超音波センサの受信部または発信部
11a〜11e,51a〜51e,61a〜61e,71a〜71i…変換手段としての受信素子または発信素子
S…受信面または発信面
11a〜11e,51a〜51e,61a〜61e,71a〜71i…変換手段としての受信素子または発信素子
S…受信面または発信面
Claims (11)
- 受信した超音波を電気信号に変換するか又は電気信号を超音波に変換して発信する複数個の変換手段を備え、各変換手段の1次共振周波数が一致しないように、当該各変換手段の寸法を不揃いにしたことを特徴とする超音波センサ。
- 請求項1に記載の超音波センサにおいて、
前記各変換手段は平板矩形状であり、
前記各変換手段は、超音波を受信するための受信面または超音波を発信するための発信面を同一方向に向け、長さ方向の一端部が一直線上に揃えられると共に幅方向に並べられることにより、同一平面上にて1次元配置され、その幅および厚みは同一で、長さだけが異なるように形成されていることを特徴とする超音波センサ。 - 請求項1に記載の超音波センサにおいて、
前記各変換手段は平板矩形状であり、
前記各変換手段は、超音波を受信するための受信面または超音波を発信するための発信面を同一方向に向け、長さ方向の両端部がそれぞれ一直線上に揃えられると共に幅方向に並べられることにより、同一平面上にて1次元配置され、その長さおよび厚みは同一で、幅だけが異なるように形成されていることを特徴とする超音波センサ。 - 請求項1に記載の超音波センサにおいて、
前記各変換手段は平板矩形状であり、
前記各変換手段は、超音波を受信するための受信面または超音波を発信するための発信面を同一方向に向け、長さ方向の両端部がそれぞれ一直線上に揃えられると共に幅方向に並べられることにより、同一平面上にて1次元配置され、その長さおよび幅は同一で、厚みだけが異なるように形成されていることを特徴とする超音波センサ。 - 請求項1に記載の超音波センサにおいて、
前記各変換手段は平板矩形状であり、
前記各変換手段は、超音波を受信するための受信面または超音波を発信するための発信面を同一方向に向けて並べられることにより、同一平面上にて縦横方向に2次元配置され、その長さ,幅,厚みはそれぞれ異なる寸法に形成されていることを特徴とする超音波センサ。 - 請求項2〜5のいずれか1項に記載の超音波センサにおいて、
前記各変換手段は、前記受信面または前記発信面が面一になるように配置されていることを特徴とする超音波センサ。 - 請求項2〜6のいずれか1項に記載の超音波センサにおいて、
前記各変換手段は、その長さ方向の両端部が振動不能に固定されていることを特徴とする超音波センサ。 - 請求項7に記載の超音波センサにおいて、
前記各変換手段の共振値Qは同一であり、
前記各変換手段のうちの任意の変換手段の1次共振周波数f1に対して、当該変換手段の次に寸法が大きいか又は小さい変換手段の1次共振周波数fが、整数である任意の係数nを用いて、以下の数式で表されることを特徴とする超音波センサ。
f=f1±n×f1/Q - 請求項8に記載の超音波センサにおいて、
前記係数n=7または前記係数n=8であることを特徴とする超音波センサ。 - 請求項8または請求項9に記載の超音波センサにおいて、
前記各変換手段の長さL、幅B、厚みH、1次共振周波数fは、以下の数式で表されることを特徴とする超音波センサ。
f=(B×H3)1/2/L2 - 請求項1〜10のいずれか1項に記載の超音波センサにおいて、
前記変換手段は、圧電式または静電容量式であることを特徴とする超音波センサ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005011484A JP2006200976A (ja) | 2005-01-19 | 2005-01-19 | 超音波センサ |
| US11/294,578 US7213460B2 (en) | 2005-01-19 | 2005-12-06 | Ultrasonic sensor |
| DE102006002067A DE102006002067A1 (de) | 2005-01-19 | 2006-01-16 | Ultraschall-Sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005011484A JP2006200976A (ja) | 2005-01-19 | 2005-01-19 | 超音波センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006200976A true JP2006200976A (ja) | 2006-08-03 |
Family
ID=36643244
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005011484A Pending JP2006200976A (ja) | 2005-01-19 | 2005-01-19 | 超音波センサ |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7213460B2 (ja) |
| JP (1) | JP2006200976A (ja) |
| DE (1) | DE102006002067A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012057272A1 (ja) * | 2010-10-27 | 2012-05-03 | オリンパス株式会社 | 超音波プローブ装置及びその制御方法 |
| CN105310718A (zh) * | 2014-07-31 | 2016-02-10 | 精工爱普生株式会社 | 超声波器件、探测器以及电子设备 |
| WO2018021075A1 (ja) * | 2016-07-29 | 2018-02-01 | 第一精工株式会社 | 振動装置 |
| WO2021038722A1 (ja) * | 2019-08-27 | 2021-03-04 | オリンパス株式会社 | 超音波エレメントおよび内視鏡 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102007026288A1 (de) * | 2007-06-06 | 2009-01-15 | Bröckling, Andreas, Dipl.-Ing. (FH) | Akustischer Druck-, Schallsensor |
| US8102101B2 (en) * | 2008-01-25 | 2012-01-24 | University Of South Carolina | Piezoelectric sensors |
| DE102012221833A1 (de) | 2012-11-29 | 2014-06-05 | Robert Bosch Gmbh | Wandler mit zumindest einer Elektrode eines ersten Typs, einer Elektrode eines zweiten Typs und zumindest einem Ferroelektret |
| KR102207928B1 (ko) * | 2014-08-13 | 2021-01-26 | 삼성전자주식회사 | 음향 센싱 소자 및 주파수 정보 획득 방법 |
| CN109444860B (zh) * | 2018-10-30 | 2023-04-28 | 泰州市计量测试院 | 多波束测深仪模拟校准装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58161396U (ja) * | 1982-04-20 | 1983-10-27 | 三洋電機株式会社 | 圧電型電気音響変換器 |
| JPS60260848A (ja) * | 1984-06-07 | 1985-12-24 | Nippon Dempa Kogyo Co Ltd | 超音波探触子及びその製造方法 |
| JPS61144582A (ja) * | 1984-12-18 | 1986-07-02 | Satoru Tabata | 多周波数超音波送受波器 |
| JPS6346492A (ja) * | 1987-06-27 | 1988-02-27 | ヤマハ株式会社 | 楽器用音板 |
| JPH02271845A (ja) * | 1989-04-14 | 1990-11-06 | Olympus Optical Co Ltd | 超音波診断装置 |
| JPH07163559A (ja) * | 1993-12-10 | 1995-06-27 | Fuji Photo Optical Co Ltd | 超音波診断装置の超音波スキャナ |
| JP2000134697A (ja) * | 1998-10-21 | 2000-05-12 | Murata Mfg Co Ltd | 圧電型電気音響変換器 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04352950A (ja) * | 1991-05-30 | 1992-12-08 | Matsushita Electric Ind Co Ltd | 超音波探触子 |
| JPH05183995A (ja) * | 1992-01-07 | 1993-07-23 | Matsushita Electric Ind Co Ltd | 複合圧電体 |
| JP3208845B2 (ja) | 1992-06-16 | 2001-09-17 | 松下電器産業株式会社 | 超音波探触子 |
| JP2682342B2 (ja) * | 1992-08-26 | 1997-11-26 | 松下電器産業株式会社 | 複合圧電体 |
| US5856722A (en) * | 1996-01-02 | 1999-01-05 | Cornell Research Foundation, Inc. | Microelectromechanics-based frequency signature sensor |
| JP3141830B2 (ja) * | 1997-11-28 | 2001-03-07 | 住友金属工業株式会社 | 音響センサ |
| JP3348686B2 (ja) * | 1998-05-22 | 2002-11-20 | 住友金属工業株式会社 | 振動波検出方法及び装置 |
| US6651504B1 (en) * | 1999-09-16 | 2003-11-25 | Ut-Battelle, Llc | Acoustic sensors using microstructures tunable with energy other than acoustic energy |
| JP2002232995A (ja) * | 2001-02-06 | 2002-08-16 | Matsushita Electric Ind Co Ltd | 超音波探触子及びその製造方法 |
-
2005
- 2005-01-19 JP JP2005011484A patent/JP2006200976A/ja active Pending
- 2005-12-06 US US11/294,578 patent/US7213460B2/en not_active Expired - Fee Related
-
2006
- 2006-01-16 DE DE102006002067A patent/DE102006002067A1/de not_active Withdrawn
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58161396U (ja) * | 1982-04-20 | 1983-10-27 | 三洋電機株式会社 | 圧電型電気音響変換器 |
| JPS60260848A (ja) * | 1984-06-07 | 1985-12-24 | Nippon Dempa Kogyo Co Ltd | 超音波探触子及びその製造方法 |
| JPS61144582A (ja) * | 1984-12-18 | 1986-07-02 | Satoru Tabata | 多周波数超音波送受波器 |
| JPS6346492A (ja) * | 1987-06-27 | 1988-02-27 | ヤマハ株式会社 | 楽器用音板 |
| JPH02271845A (ja) * | 1989-04-14 | 1990-11-06 | Olympus Optical Co Ltd | 超音波診断装置 |
| JPH07163559A (ja) * | 1993-12-10 | 1995-06-27 | Fuji Photo Optical Co Ltd | 超音波診断装置の超音波スキャナ |
| JP2000134697A (ja) * | 1998-10-21 | 2000-05-12 | Murata Mfg Co Ltd | 圧電型電気音響変換器 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012057272A1 (ja) * | 2010-10-27 | 2012-05-03 | オリンパス株式会社 | 超音波プローブ装置及びその制御方法 |
| US8867314B2 (en) | 2010-10-27 | 2014-10-21 | Olympus Corporation | Ultrasonic probe device and its control method |
| CN105310718A (zh) * | 2014-07-31 | 2016-02-10 | 精工爱普生株式会社 | 超声波器件、探测器以及电子设备 |
| WO2018021075A1 (ja) * | 2016-07-29 | 2018-02-01 | 第一精工株式会社 | 振動装置 |
| JPWO2018021075A1 (ja) * | 2016-07-29 | 2019-05-16 | 第一精工株式会社 | 振動装置 |
| US11284196B2 (en) | 2016-07-29 | 2022-03-22 | Dai-Ichi Seiko Co., Ltd. | Vibration device |
| WO2021038722A1 (ja) * | 2019-08-27 | 2021-03-04 | オリンパス株式会社 | 超音波エレメントおよび内視鏡 |
| US12097074B2 (en) | 2019-08-27 | 2024-09-24 | Olympus Corporation | Ultrasonic element and endoscope |
Also Published As
| Publication number | Publication date |
|---|---|
| US20060156821A1 (en) | 2006-07-20 |
| DE102006002067A1 (de) | 2006-07-20 |
| US7213460B2 (en) | 2007-05-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8760971B2 (en) | Method for controlling an ultrasonic sensor and ultrasonic sensor | |
| US7612485B2 (en) | Ultrasonic sensor | |
| US9440258B2 (en) | Thin film ultrasound transducer | |
| US7497121B2 (en) | Ultrasonic sensor | |
| US8531178B2 (en) | Ultrasound probe, method for manufacturing the same, and ultrasound diagnostic apparatus | |
| JP5282305B2 (ja) | 超音波探触子および超音波診断装置 | |
| EP3166735B1 (en) | Multi-cell transducer | |
| JP2006200976A (ja) | 超音波センサ | |
| JP4702255B2 (ja) | 超音波センサ | |
| JP3399415B2 (ja) | センサアレイ、センサアレイの製造方法および超音波診断装置 | |
| US7359286B2 (en) | Multi-level capacitive ultrasonic transducer | |
| JP2021111964A (ja) | 超音波センサ | |
| JP4494493B2 (ja) | 超音波センサ | |
| JP7663012B2 (ja) | 超音波センサ | |
| JP5201087B2 (ja) | 送受信装置およびこれを用いた超音波センサ | |
| CN117598725A (zh) | 超声波探头 | |
| Nakamoto et al. | Multilayer Pb (Zr, Ti) O3 thin films for ultrasonic transducer | |
| JP6162451B2 (ja) | 超音波センサ | |
| JP2022011510A (ja) | 超音波デバイス | |
| JP2006203423A (ja) | 超音波センサ | |
| US12310791B2 (en) | Ultrasound probe and ultrasound diagnostic apparatus | |
| JP7779094B2 (ja) | 積層型コンポジット振動子および水中アクティブソーナー | |
| JP2019135809A (ja) | 超音波トランスデューサ | |
| CN119644340A (zh) | 基于pmut的高温度稳定性加速度传感器及检测方法 | |
| WO2023106211A1 (ja) | 超音波センサおよび物体検知装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070305 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090513 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090602 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20091013 |