JP2006232115A - 車両用操舵装置 - Google Patents
車両用操舵装置 Download PDFInfo
- Publication number
- JP2006232115A JP2006232115A JP2005050214A JP2005050214A JP2006232115A JP 2006232115 A JP2006232115 A JP 2006232115A JP 2005050214 A JP2005050214 A JP 2005050214A JP 2005050214 A JP2005050214 A JP 2005050214A JP 2006232115 A JP2006232115 A JP 2006232115A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- reaction force
- road surface
- steered
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Abstract
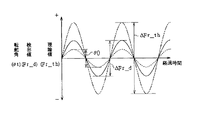
【解決手段】 ステアリング装置は、所定条件を満たす場合に、運転者のステアリング操作によらず自動的に転舵輪(詳しくはその転舵角θt)を所定の角度範囲θ0内で揺動させる。そして、転舵輪に作用する路面反力Fr(検出値Fr_d)を積極的に変化させることにより、直線走行中においても路面状態判定の実行を可能とする。
【選択図】 図4
Description
上記構成によれば、路面状態の変化をいち早く運転者に知らしめることができ、これにより急操舵や急制動等、運転者の急操作に起因する車両挙動の不安定化を未然に防止することができるようになる。
図1に示すように、本実施形態のステアリング装置1は、ステアリング(ハンドル)2を含む操舵機構3と転舵輪4の舵角を変更するための転舵機構5とが機械的に非連結、即ちステアリング2と転舵輪4とが機械的に分離された所謂ステアバイワイヤ式の車両用操舵装置である。
図2は、本実施形態のステアリング装置1の制御ブロック図である。同図に示すように、制御装置20は、転舵アクチュエータ8を制御するための第1ECU23と、反力アクチュエータ17を制御するための第2ECU24とを備えている。そして、これら第1ECU23及び第2ECU24は、それぞれ各モータ13,18を制御するためのモータ制御信号を出力するマイコン25,26と、そのモータ制御信号に基づいて各モータ13,18に駆動電力を供給する駆動回路27,28とを備えている。尚、以下に示す、各マイコン25,26内の各制御ブロックは、これらマイコン25,26が実行するコンピュータプログラムにより実現されるものである。
次に、本実施形態のステアリング装置における転舵輪揺動制御について説明する。
上述のように、基本的に上記路面状態判定は、車両の挙動に何らかの変化(操舵や制動又は加速)がない限り行うことができない。従って、例えば、車両が直線走行状態にある場合等には、路面状態の変化を捉えることができず、直線走行中にその走行路の路面状態が低μ路へと移行した場合等には、事実上、運転者の急操舵や急制動に起因する車両挙動の不安定化を有効に抑制することが困難であるという課題を残していた。
次に、本実施形態のステアリング装置における転舵輪揺動制御時の操舵反力保持制御について説明する。上述のように、本実施形態のステアリング装置1では、反力アクチュエータ17は、検出された路面反力Frに応じた操舵反力をステアリング2に付与すべくその作動が制御される。従って、何らの手当てもしない場合、上記転舵輪揺動制御時の路面反力Frの変化が操舵反力に反映されることになり、その結果、ステアリング2の微振動等の発生により操舵フィーリングを損ねてしまうおそれがある。
図6のフローチャートに示すように、制御装置20は、先ず、開始SW51が「オン」されているか否かを判定し(ステップ201)、続いて車両が直進中であるか否かを判定する(ステップ202)。そして、開始SW51が「オン」であり(ステップ201:YES)、且つ車両が直進中である場合(ステップ202:YES)には、ステアリング操作によらず自動的に転舵輪4を所定の角度範囲θ0内で揺動させるべく転舵アクチュエータ8の作動を制御(転舵輪揺動制御)し、及びステアリング2に付与する操舵反力を該転舵輪揺動制御が開始された時点の値で一定とすべく反力アクチュエータ17の作動を制御する(操舵反力保持制御、ステップ203)。尚、本実施形態では、開始SW51が「オフ」(ステップ201:NO)、又は車両が直進中ではない場合(ステップ202:NO)、制御装置20は、上記ステップ203の処理、即ち転舵輪揺動制御及び操舵反力保持制御を実行しない。
(1)制御装置20(第1ECU23)は、所定条件(開始SW51が「ON」、且つ車両直進中)を満たす場合に、ステアリング操作によらず自動的に転舵輪4(詳しくはその転舵角θt)を所定の角度範囲θ0内で揺動させるべく転舵アクチュエータ8の作動を制御する。このような構成とすれば、転舵輪4に作用する路面反力Fr(検出値Fr_d)を積極的に変化させることができ、これにより、例えば直線走行中においても路面状態判定の実行が可能となる。その結果、より迅速に路面状態の変化に対応することができるようになる。
・本実施形態では、制御手段としての制御装置20は、転舵アクチュエータ8を制御するための第1ECU23と、反力アクチュエータ17を制御するための第2ECU24とを備えることとした。しかし、これに限らず、転舵アクチュエータ8及び反力アクチュエータ17を制御する制御手段は、第1ECU23及び第2ECU24に相当するものが各々別体に設けられた構成であってもよい。
・本実施形態では、本発明をステアバイワイヤ式の車両用操舵装置(ステアリング装置)に具体化した。しかし、これに限らず転舵輪4を駆動可能なアクチュエータを有するものであれば、ステアリング2と転舵輪4とが機械的に連結された従来型のステアリング装置に具体化してもよい。即ち、ステアリング操作によらず自動的に転舵輪4を揺動させるアクチュエータは、電動パワーステアリング装置(EPS)のEPSアクチュエータや、伝達比可変装置の伝達比可変アクチュエータでもよく。また、伝達比可変アクチュエータに加えて反力アクチュエータも備えたステアリング装置であれば、転舵輪揺動制御時の操舵反力保持制御をも行うことが可能である。
Claims (8)
- 検出される車両状態量と該車両状態量の理論値との比較により車両走行路の路面状態を判定する路面状態判定手段を備えた車両用操舵装置であって、
転舵輪の転舵角を変更可能な転舵アクチュエータと、該転舵アクチュエータの作動を制御する制御手段とを備え、
前記制御手段は、所定条件を満たす場合に、ステアリング操作によらず自動的に前記転舵輪を所定の角度範囲内で揺動させるべく前記転舵アクチュエータの作動を制御すること、を特徴とする車両用操舵装置。 - 転舵輪に作用する路面反力を検出する路面反力検出手段と、前記路面反力の理論値を演算する理論路面反力演算手段と、前記検出された路面反力の検出値と前記演算された理論値との比較により車両走行路の路面状態を判定する路面状態判定手段とを備えた車両用操舵装置であって、
前記転舵輪の転舵角を変更可能な転舵アクチュエータと、該転舵アクチュエータの作動を制御する制御手段とを備え、
前記制御手段は、所定条件を満たす場合に、ステアリング操作によらず自動的に前記転舵輪を所定の角度範囲内で揺動させるべく前記転舵アクチュエータの作動を制御すること、を特徴とする車両用操舵装置。 - 請求項1又は請求項2に記載の車両用操舵装置において、
検出される路面反力に応じた操舵反力をステアリングに付与すべく制御される反力アクチュエータを備え、
前記制御手段は、前記自動的に前記転舵輪を揺動させるべく前記転舵アクチュエータの作動を制御する際、前記付与する操舵反力を該揺動制御の開始時点の値で一定とすべく前記反力アクチュエータの作動を制御すること、を特徴とする車両用操舵装置。 - 請求項3に記載の車両用操舵装置において、
前記ステアリングは、前記転舵輪と機械的に分離され、前記転舵アクチュエータは、前記ステアリング操作に応じた前記転舵角を発生させるべく前記制御されること、
を特徴とする車両用操舵装置。 - 請求項1〜請求項4のうちの何れか一項に記載の車両用操舵装置において、
前記制御手段は、前記転舵角が所定時間以上一定である場合に、前記自動的に前記転舵輪を揺動させるべく前記転舵アクチュエータの作動を制御すること、
を特徴とする車両用操舵装置。 - 請求項1〜請求項4のうちの何れか一項に記載の車両用操舵装置において、
前記制御手段は、車両が直進状態にある場合に、前記自動的に前記転舵輪を揺動させるべく前記転舵アクチュエータの作動を制御すること、を特徴とする車両用操舵装置。 - 請求項1〜請求項6のうちの何れか一項に記載の車両用操舵装置において、
前記判定により前記路面状態が低μ路であると判定された場合に、その旨を警告する警告手段を備えること、を特徴とする車両用操舵装置。 - 請求項1〜請求項7のうちの何れか一項に記載の車両用操舵装置において、
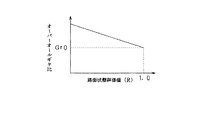
前記転舵アクチュエータは、ステアリングの操舵角に対する前記転舵角の比率であるオーバーオールギヤ比を可変可能なものであり、
前記制御手段は、前記判定により前記路面状態が低μ路であると判定された場合に、その摩擦抵抗が低いほど、前記オーバーオールギヤ比を大とすべく、前記転舵アクチュエータの作動を制御すること、を特徴とする車両用操舵装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005050214A JP2006232115A (ja) | 2005-02-25 | 2005-02-25 | 車両用操舵装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005050214A JP2006232115A (ja) | 2005-02-25 | 2005-02-25 | 車両用操舵装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006232115A true JP2006232115A (ja) | 2006-09-07 |
Family
ID=37040234
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005050214A Pending JP2006232115A (ja) | 2005-02-25 | 2005-02-25 | 車両用操舵装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006232115A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015227076A (ja) * | 2014-05-30 | 2015-12-17 | 三菱電機株式会社 | ステアバイワイア車両の操舵装置およびステアバイワイア車両の操舵制御方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04230472A (ja) * | 1991-01-07 | 1992-08-19 | Nissan Motor Co Ltd | 電子制御パワーステアリング装置 |
| JPH07101258A (ja) * | 1993-09-22 | 1995-04-18 | Mitsubishi Motors Corp | 車両用路面摩擦抵抗推定装置 |
| JPH1016600A (ja) * | 1996-07-05 | 1998-01-20 | Mitsubishi Motors Corp | 車両用左右輪間動力伝達制御装置及び車両用動力伝達制御装置 |
| JPH1199956A (ja) * | 1997-08-01 | 1999-04-13 | Honda Motor Co Ltd | 車両用可変舵角比操舵装置 |
| JP2003261052A (ja) * | 2002-03-06 | 2003-09-16 | Toyota Motor Corp | 車輌用自動操舵装置 |
| JP2004161116A (ja) * | 2002-11-12 | 2004-06-10 | Sumitomo Rubber Ind Ltd | 路面状態判定方法および装置、ならびに路面状態判定のプログラム |
-
2005
- 2005-02-25 JP JP2005050214A patent/JP2006232115A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04230472A (ja) * | 1991-01-07 | 1992-08-19 | Nissan Motor Co Ltd | 電子制御パワーステアリング装置 |
| JPH07101258A (ja) * | 1993-09-22 | 1995-04-18 | Mitsubishi Motors Corp | 車両用路面摩擦抵抗推定装置 |
| JPH1016600A (ja) * | 1996-07-05 | 1998-01-20 | Mitsubishi Motors Corp | 車両用左右輪間動力伝達制御装置及び車両用動力伝達制御装置 |
| JPH1199956A (ja) * | 1997-08-01 | 1999-04-13 | Honda Motor Co Ltd | 車両用可変舵角比操舵装置 |
| JP2003261052A (ja) * | 2002-03-06 | 2003-09-16 | Toyota Motor Corp | 車輌用自動操舵装置 |
| JP2004161116A (ja) * | 2002-11-12 | 2004-06-10 | Sumitomo Rubber Ind Ltd | 路面状態判定方法および装置、ならびに路面状態判定のプログラム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015227076A (ja) * | 2014-05-30 | 2015-12-17 | 三菱電機株式会社 | ステアバイワイア車両の操舵装置およびステアバイワイア車両の操舵制御方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5093295B2 (ja) | 操舵装置及び操舵制御装置 | |
| CN111731375B (zh) | 转向控制系统 | |
| EP1577194A1 (en) | Steering apparatus for vehicle and method for controlling the same | |
| US20110259663A1 (en) | Steering apparatus for vehicle | |
| JPWO2007129750A1 (ja) | 車両転舵制御装置 | |
| JP2010166740A (ja) | 電気自動車の制御装置 | |
| JP2013039892A (ja) | 車両のヨーモーメント発生旋回効率化装置 | |
| JP7609587B2 (ja) | 操舵制御装置 | |
| JP2005343315A (ja) | 車両用操舵装置 | |
| JP4826347B2 (ja) | 車両の操舵装置 | |
| JP2022054736A (ja) | 操舵制御装置 | |
| JP2004034834A (ja) | 運転操作装置 | |
| JP6634872B2 (ja) | 車両用制御装置 | |
| JP2007195386A (ja) | 電動車両の駆動力制御装置、自動車及び電動車両の駆動力制御方法 | |
| JP2006232115A (ja) | 車両用操舵装置 | |
| JP4635661B2 (ja) | 車両用操舵装置 | |
| JP4586551B2 (ja) | 車両用操舵装置 | |
| JP4752306B2 (ja) | 車両用操舵装置 | |
| KR101172119B1 (ko) | 급감속시 주행안정성을 향상시키기 위한 afs | |
| JP5105184B2 (ja) | 車両用操舵装置 | |
| JP4635648B2 (ja) | 車両用操舵装置 | |
| JP2000085603A (ja) | 操舵制御装置 | |
| JP7772100B2 (ja) | 操舵制御装置及び操舵制御方法 | |
| JP5685164B2 (ja) | 車両の制動制御装置 | |
| JP5757406B2 (ja) | ステアリング制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080116 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101019 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110426 |