JP2006234530A - 回転検出装置および回転検出装置付き軸受 - Google Patents
回転検出装置および回転検出装置付き軸受 Download PDFInfo
- Publication number
- JP2006234530A JP2006234530A JP2005048271A JP2005048271A JP2006234530A JP 2006234530 A JP2006234530 A JP 2006234530A JP 2005048271 A JP2005048271 A JP 2005048271A JP 2005048271 A JP2005048271 A JP 2005048271A JP 2006234530 A JP2006234530 A JP 2006234530A
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- sensor element
- sensor elements
- rotation detection
- magnetic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





















Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
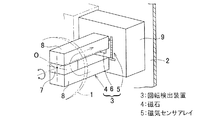
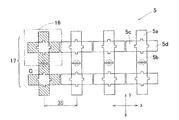
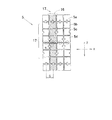
【解決手段】 磁気センサアレイと、この磁気センサアレイに対向して回転する磁石とを組み合わせて回転検出装置を構成する。磁気センサアレイの各センサ素子は、それぞれ縦横の4方向に向けて配置された4個で一組のセンサ素子組16とし、このセンサ素子組16をさらに並列接続してセンサ画素17を構成する。
【選択図】 図10
Description
ところが、上記のように磁気エンコーダ54を設けた構造では、転がり軸受51のサイズが小さい小径軸受においては、磁気センサ55を静止輪53の外径寸法内に収容することが難しかったり、1回転での回転パルス数を500以上確保できる程度の高精度な回転角度検出が難しいなどの欠点がある。
しかし、この構成の場合、半導体回路において、シリコン上に集積された回路素子に特性ばらつきが発生するのは避けられず、磁気センサアレイにおいてもセンサ素子のオフセットばらつきが発生し、角度検出精度の悪化原因となっている。
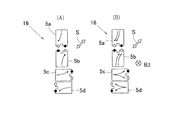
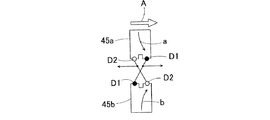
シリコンウェハ上に並べて形成される2つの磁気センサ素子45a,45bの間で、それぞれの2つのドレイン電流の大きさは無磁界状態で等しくなるのが理想であるが、製造プロセスによって傾斜成分が発生する。この傾斜成分が、例えば矢印Aに示す方向に存在するとすると、各磁気センサ素子45a,45bでは、同図に矢印a,bで示すように右方向に行くほど電流が流れ易くなり、これがオフセット信号の原因となる。上記のドレイン端子同士をクロスさせて接続する方法は、このように2つの素子45a,45bに発生するオフセット電流を互いに相殺させるものである。
この提案例によると、センサチップに応力が存在する場合に、その影響でセンサ信号が変化してしまうことが、センサ素子毎の影響の相殺によって低減される。
しかし、検出精度の向上、およびシリコンチップ等の半導体チップの利用効率の面で、さらなる改良が望まれる。
この発明の他の目的は、センサ素子を密に配置することができて、より一層の検出精度の向上が図れ、また、半導体チップの利用効率を上げることができるようにすることである。
この構成によると、一組のセンサ素子組を構成する4個のセンサ素子がそれぞれ異なる方向に配置されているため、これら4つのセンサ素子では、作用する応力の効果がそれぞれ異なる。そのため、これら4つのセンサ素子を並列に接続してセンサ素子組とすることで、このセンサ素子組から出力される磁気信号から、半導体チップの歪みに起因するセンサ素子のオフセット信号を低減できる。この4個で一組のセンサ素子組をさらに並列接続してセンサ画素とするため、センサ画素を構成する並列接続されたセンサ素子数が増え、そのため前記半導体チップの歪みに起因するセンサ素子のオフセット信号がより一層低減される。そのため、応力や製造プロセスのばらつきの影響がより低減された出力を得ることができる。このようなオフセットばらつきを低減できる効果を持ったセンサ画素をアレイ状に並べることにより、検出した磁界分布信号に重畳するノイズ成分を低減することができて、回転検出装置の角度検出機能が向上し、ロータリエンコーダとしての分解能・精度を向上させることができる。
センサ素子を十字形に配置した場合に、単純にそのセンサ素子組を配列すると、半導体チップ上のセンサ素子の配置密度が低くなってしまう。しかし、上記のように、縦方向または横方向に並ぶセンサ素子を互いに近接させて配置することで、センサ素子の配置密度を高くすることができる。センサ素子の配置密度が高くなると、センサ画素の配列密度を高くでき、角度検出精度をさらに向上させることができる。
転がり軸受に回転検出装置を一体化することで、軸受使用機器の部品点数、組立工数の削減、およびコンパクト化が図れる。その場合に、回転検出装置は、上記のように小型で高精度な回転角度出力が可能であるため、小径軸受等の軸受においても、満足できる回転角度出力を得ることができる。
この発明の回転検出装置付き軸受は、この発明における回転検出装置を転がり軸受に設けたため、軸受使用機器の部品点数、組立工数の削減、およびコンパクト化が図れる。
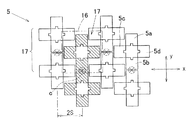
このように磁気センサアレイ5が形成された半導体チップ9は、その素子形成面が前記磁石4と対向するように非回転側部材2に取付けられる。半導体チップ9はシリコンチップである。
この磁気センサ素子5a〜5dでは、ソース領域33からドレイン領域34に向かって流れる電子e- にローレンツ力が働き、磁界Bz の強さに応じて2つのドレイン端子D1,D2に流れる電流I1 ,I2 が変化することから、センサ素子5a〜5dに印加されている磁界Bz の強さを検出する。
このようなオフセット信号のうち、センサチップの応力に起因するオフセット信号による角度検出精度の悪化が、図4に示したように、縦横に向く4個のセンサ素子5a〜5dを並列接続してセンサ組16とすることで、後述のように防止される。
いま、図7に示す位置X1とX2に磁気センサアレイ5の検出磁界のN磁極とS磁極の境界であるゼロクロス位置があるとする。この状態で、磁気センサアレイ5の各センサ列5A〜5Dの出力が、図6(A)〜(D)に示す信号波形となる。したがって、ゼロクロス位置X1,X2は、センサ列5A,5Cの出力からゼロ付近のデータを使って直線近似することで算出できる。
角度計算は、次式(1)で行うことができる。
θ=tan-1(2L/b) ……(1)
ここで、θは、磁石4の回転角度θを絶対角度(アブソリュート値)で示した値である。2Lは、矩形に並べられる各磁気センサアレイ5の1辺の長さである。bは、ゼロクロス位置X1,X2間の横方向長さである。
ゼロクロス位置X1,X2がセンサ列5B,5Dにある場合には、それらの出力から得られるゼロクロス位置データにより、上記と同様にして回転角度θが算出される。
また、磁気センサアレイ5として、1つの半導体チップ9の上に、図8の接続形態のセンサ素子組16からなる磁気センサアレイ5と、図9の接続形態のセンサ素子組16からなる磁気センサアレイ5とを並設するか、接続方法を切替可能として、いずれか一方の出力だけを選択使用することにより、回転センサと応力センサとに切替え使用するようにしても良い。
また、上記オフセット信号の低減処置として、センサ素子5a〜5dの製造プロセスの変更を必要としないので、コスト増を招くこともない。
回転検出装置における他の構成は先の実施形態の場合と同じであり、ここではその説明を省略する。
これにより、センサ画素17の並び方向(x方向)の配置間隔を、センサ素子1.5個分の間隔1.5Sとすることができる。
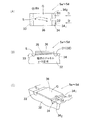
外輪22にはセンサ取付部材27が取付けられ、このセンサ取付部材27に、図1の磁気センサアレイ5および角度算出手段6の集積された半導体チップ9が取付けられている。また、このセンサ取付部材27に、角度算出手段6の出力を取り出すための出力ケーブル29も取付けられている。センサ取付部材27は、外周部の先端円筒部27aを外輪22の内径面に嵌合させ、この先端円筒部27aの近傍に形成した鍔部27bを外輪22の幅面に係合させて軸方向の位置決めがなされている。
4…磁石
5…磁気センサアレイ
5a〜5d…磁気センサ素子
16…センサ素子組
17…センサ画素
20…転がり軸受
Claims (7)
- 磁気センサアレイと、この磁気センサアレイに対向して回転する磁石とを組み合わせた回転検出装置において、前記磁気センサアレイの各センサ素子を、それぞれ異なる方向を向き互いに並列に接続された4個で一組のセンサ素子組とし、このセンサ素子組をさらに並列接続してセンサ画素を構成したことを特徴とする回転検出装置。
- 請求項1において、前記各センサ素子組の4個のセンサ素子を分散して配置した回転検出装置。
- 請求項1において、前記各センサ素子組の4個のセンサ素子を、十字形に配置した回転検出装置。
- 請求項3において、4個のセンサ素子を十字形に配置したセンサ素子組における縦方向に並ぶ2つのセンサ素子、または横方向に並ぶ2つのセンサ素子を互いに近接させて配置した配置した回転検出装置。
- 請求項3において、センサ素子組を千鳥状に配列した回転検出装置。
- 請求項1ないし請求項5のいずれか1項において、1画素を構成するセンサ素子組の配置を所定方向に対称とし、各画素の前記所定方向の中心座標を同一ライン上に並べた回転検出装置。
- 請求項1ないし請求項6のいずれか1項に記載の回転検出装置を転がり軸受に設けた回転検出装置付き軸受。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005048271A JP4549202B2 (ja) | 2005-02-24 | 2005-02-24 | 回転検出装置および回転検出装置付き軸受 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005048271A JP4549202B2 (ja) | 2005-02-24 | 2005-02-24 | 回転検出装置および回転検出装置付き軸受 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006234530A true JP2006234530A (ja) | 2006-09-07 |
| JP4549202B2 JP4549202B2 (ja) | 2010-09-22 |
Family
ID=37042352
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005048271A Expired - Fee Related JP4549202B2 (ja) | 2005-02-24 | 2005-02-24 | 回転検出装置および回転検出装置付き軸受 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4549202B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101417068B1 (ko) * | 2008-04-24 | 2014-07-08 | 현대자동차주식회사 | 차량용 조향각 센서 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0611556A (ja) * | 1991-12-21 | 1994-01-21 | Deutsche Itt Ind Gmbh | オフセット補償されたホールセンサ |
| JP2004037133A (ja) * | 2002-07-01 | 2004-02-05 | Ntn Corp | 回転検出装置および回転検出装置付き軸受 |
-
2005
- 2005-02-24 JP JP2005048271A patent/JP4549202B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0611556A (ja) * | 1991-12-21 | 1994-01-21 | Deutsche Itt Ind Gmbh | オフセット補償されたホールセンサ |
| JP2004037133A (ja) * | 2002-07-01 | 2004-02-05 | Ntn Corp | 回転検出装置および回転検出装置付き軸受 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101417068B1 (ko) * | 2008-04-24 | 2014-07-08 | 현대자동차주식회사 | 차량용 조향각 센서 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4549202B2 (ja) | 2010-09-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11592318B2 (en) | Arrangement, method and sensor for measuring an absolute angular position using a multi-pole magnet | |
| JP4994365B2 (ja) | ホール素子及び磁気センサ | |
| JP3848670B1 (ja) | 回転角度検出装置 | |
| US20130200883A1 (en) | Magnetic field sensor | |
| JP2012215415A (ja) | アブソリュートエンコーダ装置及びモータ | |
| JP3973983B2 (ja) | 回転検出装置および回転検出装置付き軸受 | |
| JP4319153B2 (ja) | 磁気センサ | |
| KR101397273B1 (ko) | 자기력 센서 | |
| JP6033270B2 (ja) | 磁気式位置検出装置 | |
| WO2007077700A1 (ja) | 回転角度検出装置および回転角度検出装置付き軸受 | |
| US7948231B2 (en) | Rotation detecting apparatus having magnetic sensor array and bearing provided with same | |
| JP2003148999A (ja) | 回転検出装置および回転検出装置付き軸受 | |
| JP4549202B2 (ja) | 回転検出装置および回転検出装置付き軸受 | |
| US20060082365A1 (en) | Toothed shell on a variable reluctance speed sensor | |
| JP2008051683A (ja) | 回転センサ付き車輪用軸受装置 | |
| CN108027256A (zh) | 直动旋转检测器 | |
| JP4553714B2 (ja) | 回転検出装置および回転検出装置付き軸受 | |
| JP4195363B2 (ja) | 回転検出装置 | |
| JP4869760B2 (ja) | 回転検出装置付き軸受 | |
| JP2007010449A (ja) | 回転角検出装置 | |
| JP2007078402A (ja) | スロットルバルブの回転角度検出装置 | |
| JP2006343140A (ja) | 磁気アレイセンサ回路およびこれを用いた回転検出装置 | |
| JPS61189414A (ja) | 磁束密度変化検知装置 | |
| JP2007183198A (ja) | 回転角度検出装置および回転角度検出装置付き軸受 | |
| JP2020197482A (ja) | 回転検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080130 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100611 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100706 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100706 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130716 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |