JP2006237407A - 基板移送装置 - Google Patents
基板移送装置 Download PDFInfo
- Publication number
- JP2006237407A JP2006237407A JP2005052118A JP2005052118A JP2006237407A JP 2006237407 A JP2006237407 A JP 2006237407A JP 2005052118 A JP2005052118 A JP 2005052118A JP 2005052118 A JP2005052118 A JP 2005052118A JP 2006237407 A JP2006237407 A JP 2006237407A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- moving
- transfer apparatus
- blade
- substrate transfer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000000758 substrate Substances 0.000 title claims abstract description 103
- 230000002265 prevention Effects 0.000 claims description 3
- 238000000034 method Methods 0.000 description 5
- 230000002159 abnormal effect Effects 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000004140 cleaning Methods 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
Images






Landscapes
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Manipulator (AREA)
Abstract
【解決手段】基板移送装置は、駆動手段によって動作が制御されるロボットアーム部と、前記ロボットアーム部の先端に設けられ、基板Wが置かれるブレード120と、前記ブレード120に設けられ、前記ブレード120に置かれた基板Wを正位置に位置させると同時に基板Wを固定するクランピング部材130とを含む。
【選択図】図2
Description
120 ブレード
130 クランピング部材
132 空圧シリンダ
134 移動プッシャ
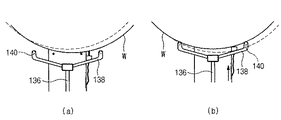
136 コネクタ
Claims (12)
- 基板を移送させるための装置において、
駆動手段によって動作が制御されるロボットアーム部と、
前記ロボットアーム部の先端に設けられ、基板が置かれるブレードと、
前記ブレードに設けられ、前記ブレードに置かれた基板を正位置に位置させると同時に基板を固定するクランピング部材とを含むことを特徴とする基板移送装置。 - 前記ブレードは固定フィンガを含み、
前記クランピング部材は、
前記ブレードに置かれた基板を前記固定フィンガの方に押すための移動プッシャと、
前記移動プッシャをスライド移動させるための駆動部と、
前記駆動部が設けられるケースとを含むことを特徴とする請求項1に記載の基板移送装置。 - 前記駆動部は、
空圧シリンダからなることを特徴とする請求項2に記載の基板移送装置。 - 前記空圧シリンダのシリンダ位置を感知して、基板が正常に把持されたか、または逸脱したかを判別する感知部をさらに含むことを特徴とする請求項3に記載の基板移送装置。
- 前記空圧シリンダのシリンダ位置は待機、把持、および逸脱領域に区分され、
前記感知部は、
前記シリンダが待機領域にあることを感知する第1センサと、
前記シリンダが把持領域からはずれて逸脱領域にあることを感知する第2センサとを含むことを特徴とする請求項4に記載の基板移送装置。 - 前記感知部は前記ブレードに基板が位置したかを感知する第3センサをさらに含むことを特徴とする請求項5に記載の基板移送装置。
- 前記移動プッシャは、
前記駆動部の移動軸と連結されるコネクタと、
前記コネクタから両側に延長されて形成される一対のサポータと、
前記一対のサポータに設けられ、基板のエッジと接触して基板を支持する移動フィンガとを含むことを特徴とする請求項2に記載の基板移送装置。 - 前記クランピング部材は、
前記移動プッシャの移動距離を規制する少なくとも一つのストッパをさらに含むことを特徴とする請求項2に記載の基板移送装置。 - 前記ストッパは前記ケースにねじ式で設けられ、前記ストッパの位置を調整することによって、前記移動プッシャの前進動作時、前記基板との距離を調整可能としたことを特徴とする請求項8に記載の基板移送装置。
- 前記クランピング部材は、
前記移動プッシャと前記基板との接触時に発生する衝撃を緩和するために前記移動プッシャの移動速度を調節可能とする衝撃防止用スプリングをさらに含むことを特徴とする請求項2に記載の基板移送装置。 - 前記衝撃防止用スプリングは前記ケースと前記移動軸との間に位置することを特徴とする請求項10に記載の基板移送装置。
- 前記ブレードは基板の底面を支持する複数の支持突起を有することを特徴とする請求項1に記載の基板移送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005052118A JP4460477B2 (ja) | 2005-02-25 | 2005-02-25 | 基板移送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005052118A JP4460477B2 (ja) | 2005-02-25 | 2005-02-25 | 基板移送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006237407A true JP2006237407A (ja) | 2006-09-07 |
| JP4460477B2 JP4460477B2 (ja) | 2010-05-12 |
Family
ID=37044706
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005052118A Expired - Lifetime JP4460477B2 (ja) | 2005-02-25 | 2005-02-25 | 基板移送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4460477B2 (ja) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010022823A1 (de) * | 2008-09-01 | 2010-03-04 | Rena Gmbh | Vorrichtung und verfahren zum handhaben von substraten |
| WO2010106785A1 (ja) * | 2009-03-19 | 2010-09-23 | 芝浦メカトロニクス株式会社 | 基板搬送装置及び基板搬送方法 |
| JP2013526074A (ja) * | 2010-05-07 | 2013-06-20 | ラム・リサーチ・アーゲー | ウエハ形状物品を保持するための装置 |
| KR101395208B1 (ko) * | 2007-03-30 | 2014-05-22 | 주성엔지니어링(주) | 기판 이송 장치 및 이를 이용한 기판 정렬 방법 |
| KR20140091201A (ko) * | 2013-01-10 | 2014-07-21 | 주식회사 엘지실트론 | 웨이퍼 핸들링 완드 |
| JP2014236036A (ja) * | 2013-05-31 | 2014-12-15 | シンフォニアテクノロジー株式会社 | ワーク搬送ロボット |
| JP2019121697A (ja) * | 2018-01-05 | 2019-07-22 | 東京エレクトロン株式会社 | 基板把持機構、基板搬送装置及び基板処理システム |
| JP2019197799A (ja) * | 2018-05-09 | 2019-11-14 | 芝浦メカトロニクス株式会社 | 基板把持装置、基板搬送装置及び基板搬送方法 |
| CN110660723A (zh) * | 2018-06-29 | 2020-01-07 | 上海微电子装备(集团)股份有限公司 | 一种机械手、键合腔体、晶圆键合系统及键合方法 |
| CN111029275A (zh) * | 2018-10-10 | 2020-04-17 | 东京毅力科创株式会社 | 基板处理系统 |
| JP2020066097A (ja) * | 2018-10-24 | 2020-04-30 | 日本電産サンキョー株式会社 | 産業用ロボットのハンドおよび産業用ロボット |
| CN111660309A (zh) * | 2020-06-05 | 2020-09-15 | 中国科学院微电子研究所 | 一种用于转移晶圆的机器臂 |
| US20210366747A1 (en) * | 2020-05-22 | 2021-11-25 | Tokyo Electron Limited | Substrate transfer device and substrate gripping determination method |
-
2005
- 2005-02-25 JP JP2005052118A patent/JP4460477B2/ja not_active Expired - Lifetime
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101395208B1 (ko) * | 2007-03-30 | 2014-05-22 | 주성엔지니어링(주) | 기판 이송 장치 및 이를 이용한 기판 정렬 방법 |
| WO2010022823A1 (de) * | 2008-09-01 | 2010-03-04 | Rena Gmbh | Vorrichtung und verfahren zum handhaben von substraten |
| WO2010106785A1 (ja) * | 2009-03-19 | 2010-09-23 | 芝浦メカトロニクス株式会社 | 基板搬送装置及び基板搬送方法 |
| JPWO2010106785A1 (ja) * | 2009-03-19 | 2012-09-20 | 芝浦メカトロニクス株式会社 | 基板搬送装置及び基板搬送方法 |
| JP2013526074A (ja) * | 2010-05-07 | 2013-06-20 | ラム・リサーチ・アーゲー | ウエハ形状物品を保持するための装置 |
| KR102051022B1 (ko) * | 2013-01-10 | 2019-12-02 | 에스케이실트론 주식회사 | 웨이퍼 핸들링 완드 |
| KR20140091201A (ko) * | 2013-01-10 | 2014-07-21 | 주식회사 엘지실트론 | 웨이퍼 핸들링 완드 |
| JP2014236036A (ja) * | 2013-05-31 | 2014-12-15 | シンフォニアテクノロジー株式会社 | ワーク搬送ロボット |
| JP7064885B2 (ja) | 2018-01-05 | 2022-05-11 | 東京エレクトロン株式会社 | 基板把持機構、基板搬送装置及び基板処理システム |
| JP2019121697A (ja) * | 2018-01-05 | 2019-07-22 | 東京エレクトロン株式会社 | 基板把持機構、基板搬送装置及び基板処理システム |
| JP2019197799A (ja) * | 2018-05-09 | 2019-11-14 | 芝浦メカトロニクス株式会社 | 基板把持装置、基板搬送装置及び基板搬送方法 |
| JP7126856B2 (ja) | 2018-05-09 | 2022-08-29 | 芝浦メカトロニクス株式会社 | 基板把持装置、基板搬送装置及び基板搬送方法 |
| CN110660723A (zh) * | 2018-06-29 | 2020-01-07 | 上海微电子装备(集团)股份有限公司 | 一种机械手、键合腔体、晶圆键合系统及键合方法 |
| CN111029275A (zh) * | 2018-10-10 | 2020-04-17 | 东京毅力科创株式会社 | 基板处理系统 |
| CN111029275B (zh) * | 2018-10-10 | 2024-06-11 | 东京毅力科创株式会社 | 基板处理系统 |
| JP2020066097A (ja) * | 2018-10-24 | 2020-04-30 | 日本電産サンキョー株式会社 | 産業用ロボットのハンドおよび産業用ロボット |
| JP7190867B2 (ja) | 2018-10-24 | 2022-12-16 | 日本電産サンキョー株式会社 | 産業用ロボットのハンドおよび産業用ロボット |
| US20210366747A1 (en) * | 2020-05-22 | 2021-11-25 | Tokyo Electron Limited | Substrate transfer device and substrate gripping determination method |
| US11923222B2 (en) * | 2020-05-22 | 2024-03-05 | Tokyo Electron Limited | Substrate transfer device and substrate gripping determination method |
| CN111660309A (zh) * | 2020-06-05 | 2020-09-15 | 中国科学院微电子研究所 | 一种用于转移晶圆的机器臂 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4460477B2 (ja) | 2010-05-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7611182B2 (en) | Wafer transfer apparatus | |
| JP4460477B2 (ja) | 基板移送装置 | |
| JP4402811B2 (ja) | 被処理体の搬送システムおよび被処理体の位置ずれ量の検出方法 | |
| CN107529670B (zh) | 基板处理装置和方法 | |
| JP5185054B2 (ja) | 基板搬送方法、制御プログラム及び記憶媒体 | |
| JP2001110873A (ja) | 処理装置 | |
| JP6802726B2 (ja) | 基板搬送装置、それを備える基板処理装置および基板搬送方法 | |
| JP2018121007A (ja) | 基板搬送装置、検出位置較正方法および基板処理装置 | |
| JP2001148411A (ja) | 基板のクランプを検出するためのシステム | |
| JP5614417B2 (ja) | 搬送システム | |
| JP2019212655A (ja) | プラズマ処理装置および半導体装置の製造方法 | |
| KR20170136521A (ko) | 기판 반송 로봇 및 기판 처리 시스템 | |
| US20190148210A1 (en) | Substrate transfer hand and robot | |
| KR20020006461A (ko) | 반도체 처리 시스템 및 그 반송 장치 | |
| WO2005091355A1 (ja) | 搬送機構の搬送ズレを割り出す方法及び半導体処理装置 | |
| KR100554361B1 (ko) | 기판 이송 장치 | |
| JP4471704B2 (ja) | 基板検出装置、基板検出方法、基板搬送装置および基板搬送方法、基板処理装置および基板処理方法 | |
| JP2017092309A (ja) | 基板のアライメント装置 | |
| CN101208791A (zh) | 位置修正装置、真空处理装置以及位置修正方法 | |
| WO2022097754A1 (ja) | 産業用ロボット | |
| JP7203575B2 (ja) | ウエハアライメント装置 | |
| JPH11163093A (ja) | 基板搬送ロボット | |
| JP6024698B2 (ja) | 基板搬送用真空吸着アーム | |
| JP2002261154A (ja) | 基板処理装置における基板のアライメント方法及び基板処理装置 | |
| KR20050087361A (ko) | 기판 이송 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090420 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090526 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090821 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091020 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100202 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100212 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4460477 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130219 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130219 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140219 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |