JP2006304586A - 直流電源装置 - Google Patents
直流電源装置 Download PDFInfo
- Publication number
- JP2006304586A JP2006304586A JP2006051577A JP2006051577A JP2006304586A JP 2006304586 A JP2006304586 A JP 2006304586A JP 2006051577 A JP2006051577 A JP 2006051577A JP 2006051577 A JP2006051577 A JP 2006051577A JP 2006304586 A JP2006304586 A JP 2006304586A
- Authority
- JP
- Japan
- Prior art keywords
- power supply
- input current
- output voltage
- voltage
- input
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






















Landscapes
- Rectifiers (AREA)
Abstract
【解決手段】交流電源を整流する整流器4と、整流器4の出力を平滑化するコンデンサ5と、交流電源1からリアクトル2を介して流れる短絡電流を制御するスイッチ素子3と、スイッチ素子3の動作パルスを制御する制御部10とを備えた直流電源装置において、制御部10は、直流電源装置の出力電圧をスイッチ素子3の短絡時間にて制御し、直流電源装置の力率及び高調波電流をスイッチ素子3の短絡開始位相にて制御する。
【選択図】図1
Description
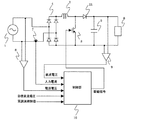
図1は本発明の実施の形態1に係る直流電源装置の回路ブロック図である。図1において、1は交流電源、2はリアクトル、3は交流電源1とリアクトル2を介して電源短絡電流を流し入力力率改善、高調波電流抑制、直流電圧を制御するスイッチ素子、4は交流電源1を直流に整流する整流器、5は整流器4の出力を平滑化するコンデンサ、6は負荷、7は交流電源1から流れる入力電流を検出する入力電流検出器、8は交流電源1の電圧を検出する電源電圧検出器、9は負荷6へ出力する出力直流電圧を検出する直流電圧検出器、10は入力電流検出器7、電源電圧検出器8、直流電圧検出器9からの検出信号からスイッチ素子3を動作させる駆動信号を生成し、出力する制御部である。
図9は、本発明の実施の形態2に係る制御部の制御ブロック図であり、図10は、図9の制御部の動作を示すフローチャートである。
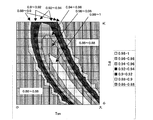
前述までの実施の形態1、2では、電源半周期に1回の低速スイッチ動作にて説明していたため、最大入力力率の動作状態と高調波規制適合状態が一致しないとして説明した。さらに、この一致しない理由はリアクトル2のインダクタンス値が支配的であり、この値を必要最小値よりも大きくすることにより、一致するとも説明した。そこで、本実施の形態3では、図12に示すような電源半周期に数回程度スイッチ素子を動作する低速動作と定義し、必要最小のインダクタンス値のリアクトル2が構成されているとして説明する。
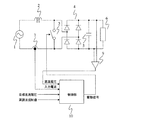
図13は、本発明の実施の形態4に係る直流電源装置の構成を示す回路ブロック図である。図1と同動作の要素には同一符号を付し、説明は省略する。図13では、図1のスイッチ素子3をダイオード整流器3aとIGBT3bにて構成しているが、IGBT3bを用いる場合には、ダイオード整流器3aと組合せて交流電流が流れるスイッチ素子3を構成することが一般的である。また、図1では全波整流構成であった回路が、図13では倍電圧整流構成となり、整流器4の出力側のコンデンサ5が直列接続され、その中点が整流器4の入力側と接続されている。
図18は、本発明の実施の形態5に係る直流電源装置の構成を示す回路ブロック図である。図1と同動作の要素には同一符号を付し、説明は省略する。図18において、31は短絡電流がリアクトル2を介して流れる際に、電流変化率di/dtを抑制する共振コンデンサである。
図20は、本発明の実施の形態6に係る回路図、図21は制御部の制御ブロック図であり、実施の形態2と同様に図10は、制御部10の動作を示すフローチャートである。さらに前述までの実施の形態は、制御に電源電圧検出値を取り入れていたが、図20では、電源電圧ゼロ点検出器23による信号を制御に取り入れている。

図22は、本発明の実施の形態7に係る回路図、図23は制御部の制御ブロック図であり、実施の形態2と同様に図10は、制御部10の動作を示すフローチャートである。前述までの実施の形態は、制御に電源電圧検出値もしくは電源電圧ゼロ点信号を取り入れていたが、図22は電源電圧に関する信号を取り入れていないことが特徴である。
図22は、本発明の実施の形態8に係る回路図、図25は制御部の制御ブロック図であり、実施の形態2と同様に図10は、図25の制御部の動作を示すフローチャートである。本実施の形態8は、実施の形態7と同様に、電源電圧に関する信号を取り入れずに制御を行うことを特徴としている。
Claims (13)
- 交流電源を整流する整流手段と、前記整流手段の出力を平滑化するコンデンサと、交流電源又は前記整流手段からリアクトルを介して流れる短絡電流を制御するスイッチ手段と、前記スイッチ手段の動作パルスを制御する制御手段とを備えた直流電源装置において、
前記制御手段は、直流電源装置の出力電圧を前記スイッチ手段の短絡時間にて制御し、直流電源装置の力率及び高調波電流を前記スイッチ手段の短絡開始位相にて制御することを特徴とする直流電源装置。 - 交流電源をリアクトルを介して全波整流する整流手段と、前記整流手段の出力を平滑化するコンデンサと、前記コンデンサに並列接続され、互いに直列に接続された複数の昇圧用コンデンサと、前記整流手段の入力端子と前記昇圧用コンデンサの接続点との間に設けられたスイッチング手段と、前記スイッチ手段の動作パルスを制御する制御手段とを備えた直流電源装置において、
前記制御手段は、直流電源装置の出力電圧を前記スイッチ手段の短絡時間にて制御し、直流電源装置の力率及び高調波電流を前記スイッチ手段の短絡開始位相にて制御することを特徴とする直流電源装置。 - 出力電圧を検出する出力電圧検出部を備え、
前記制御手段は、前記出力電圧検出部により検出された電圧を一定にすべく前記スイッチ手段の短絡時間を制御し、前記スイッチ手段の短絡開始位相を所定範囲内で可変して力率及び高調波電流を制御することを特徴とする請求項1又は2記載の直流電源装置。 - 前記制御手段は、前記スイッチ手段の短絡開始位相を、最大力率となるべく所定範囲内で可変して力率及び高調波電流を制御することを特徴とする請求項3記載の直流電源装置。
- 前記制御手段は、前記スイッチ手段の短絡開始位相を、前記高調波が所定値以下となるべく所定範囲内で可変して力率及び高調波電流を制御することを特徴とする請求項3記載の直流電源装置。
- 出力電圧を検出する出力電圧検出部と、
入力電圧を検出する入力電圧検出部と、
入力電流を検出する入力電流検出部とを備え、
前記制御手段は、前記出力電圧検出部により検出された電圧を一定にすべく前記スイッチ手段の短絡時間を制御し、前記入力電圧検出部により検出された入力電圧及び前記入力電流検出部により検出された入力電流から力率を最大とすべく前記スイッチ手段の短絡開始位相を制御することを特徴とする請求項1又は2記載の直流電源装置。 - 出力電圧を検出する出力電圧検出部と、
入力電圧のゼロ点を検出する入力電圧ゼロ点検出部と、
入力電流を検出する入力電流検出部とを備え、
前記制御手段は、前記出力電圧検出部により検出された電圧を一定にすべく前記スイッチ手段の短絡時間を制御し、前記入力電圧ゼロ点検出部により検出されたゼロ点信号及び前記入力電流検出部により検出された入力電流から力率を最大とすべく前記スイッチ手段の短絡開始位相を制御することを特徴とする請求項1又は2記載の直流電源装置。 - 出力電圧を検出する出力電圧検出部と、
入力電流を検出する入力電流検出部とを備え、
前記制御手段は、前記出力電圧検出部により検出された電圧を一定にすべく前記スイッチ手段の短絡時間を制御し、前記入力電流検出部により検出された入力電流と、該入力電流を周波数解析することにより得られた基本成分の信号とから入力電圧を推定し、該入力電圧及び前記入力電流から力率を最大とすべく前記スイッチ手段の短絡開始位相を制御することを特徴とする請求項1又は2記載の直流電源装置。 - 出力電圧を検出する出力電圧検出部と、
入力電流を検出する入力電流検出部とを備え、
前記制御手段は、前記出力電圧検出部により検出された電圧を一定にすべく前記スイッチ手段の短絡時間を制御し、前記入力電流検出部により検出された入力電流と前記出力電圧検出部から得られた出力電圧とにより電源電圧を推定し、該電源電圧及び前記入力電流から力率を最大とすべく前記スイッチ手段の短絡開始位相を制御することを特徴とする請求項1又は2記載の直流電源装置。 - 出力電圧を検出する出力電圧検出部と
入力電流を検出する入力電流検出部とを備え、
前記制御手段は、前記出力電圧検出部により検出された出力電圧を一定にすべく前記スイッチ手段の短絡時間を制御し、前記入力電流検出部により検出された入力電流を周波数解析し、高調波規制と比較して規制適合状態とすべく前記スイッチ手段の短絡開始位相を制御することを特徴とする請求項1又は2記載の直流電源装置。 - 出力電圧を検出する出力電圧検出部と、
入力電圧を検出する入力電圧検出部と、
入力電流を検出する入力電流検出部とを備え、
前記制御手段は、前記出力電圧検出部により検出された出力電圧を一定にすべく前記スイッチ手段の短絡時間を制御し、前記入力電圧検出部により検出された入力電圧及び前記入力電流検出部により検出された入力電流から力率を最大とすべく前記スイッチ手段の短絡開始位相に制御し、最大力率到達後に、前記入力電流検出部により検出された入力電流を周波数解析し、高調波規制と比較して規制適合状態とすべく前記スイッチ手段の短絡開始位相を制御し、短絡開始位相の制御を切替えることを特徴とする請求項1又は2記載の直流電源装置。 - 出力電圧を検出する出力電圧検出部と、
入力電流を検出する入力電流検出部とを備え、
前記制御手段は、前記出力電圧検出部により検出された出力電圧を一定にすべく前記スイッチ手段の短絡時間を制御し、前記出力電圧検出部により検出された電圧を一定にすべく前記スイッチ手段の短絡時間を制御し、前記入力電流検出部により検出された入力電流と、前記出力電圧検出部から得られた出力電圧とにより電源電圧を推定し、該電源電圧及び前記入力電流から力率を最大とすべく前記スイッチ手段の短絡開始位相を制御し、最大力率到達後に、前記入力電流検出部により検出された入力電流を周波数解析し、高調波規制と比較して規制適合状態とすべく前記スイッチ手段の短絡開始位相を制御し、短絡開始位相の制御を切替えることを特徴とする請求項1又は2記載の直流電源装置。 - 前記制御手段は、前記スイッチ手段の短絡時間と前記スイッチ手段の短絡開始位相とをそれぞれ独立して制御することを特徴とする請求項1〜12のいずれかに記載の直流電源装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006051577A JP2006304586A (ja) | 2005-03-25 | 2006-02-28 | 直流電源装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005087699 | 2005-03-25 | ||
| JP2006051577A JP2006304586A (ja) | 2005-03-25 | 2006-02-28 | 直流電源装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006304586A true JP2006304586A (ja) | 2006-11-02 |
Family
ID=37472213
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006051577A Pending JP2006304586A (ja) | 2005-03-25 | 2006-02-28 | 直流電源装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006304586A (ja) |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008253102A (ja) * | 2007-03-30 | 2008-10-16 | Daikin Ind Ltd | 電源供給回路 |
| JP2009095160A (ja) * | 2007-10-10 | 2009-04-30 | Mitsubishi Electric Corp | 電力変換装置 |
| JP2010119278A (ja) * | 2008-11-14 | 2010-05-27 | Daikin Ind Ltd | 整流装置 |
| JP2010273505A (ja) * | 2009-05-25 | 2010-12-02 | Toshiba Corp | 洗濯機のモータ駆動装置 |
| WO2011048818A1 (ja) * | 2009-10-23 | 2011-04-28 | パナソニック株式会社 | 直流電源装置およびこれを用いた電動機駆動用インバータ装置 |
| JP2011091947A (ja) * | 2009-10-23 | 2011-05-06 | Panasonic Corp | 直流電源装置 |
| JP2011115007A (ja) * | 2009-11-30 | 2011-06-09 | Mitsubishi Electric Corp | 交流直流変換装置、それを備えたモーター駆動装置、並びにそのモーター駆動装置を搭載した空気調和機、冷蔵庫、ヒートポンプ式給湯機、洗濯機及び掃除機 |
| JP2011125102A (ja) * | 2009-12-09 | 2011-06-23 | Panasonic Corp | 電動機駆動用インバータ装置 |
| KR101066742B1 (ko) | 2007-03-30 | 2011-09-21 | 다이킨 고교 가부시키가이샤 | 전원공급회로 |
| CN102340251A (zh) * | 2010-07-20 | 2012-02-01 | 台达电子工业股份有限公司 | 交流-直流转换器及其控制电路 |
| JP2013081281A (ja) * | 2011-10-03 | 2013-05-02 | Seiko Epson Corp | 発電装置、電子機器、移動手段及び発電装置の制御方法 |
| JP2013081286A (ja) * | 2011-10-03 | 2013-05-02 | Seiko Epson Corp | 発電装置、電子機器、移動手段および発電装置の制御方法 |
| WO2013061469A1 (ja) * | 2011-10-28 | 2013-05-02 | 三菱電機株式会社 | 直流電源装置および電動機駆動装置 |
| JP2013201805A (ja) * | 2012-03-23 | 2013-10-03 | Sharp Corp | 同期モータ駆動装置 |
| JP2015033288A (ja) * | 2013-08-06 | 2015-02-16 | 三菱電機株式会社 | 直流電源装置、モータ駆動装置、空気調和装置、冷蔵庫、及びヒートポンプ給湯装置 |
| WO2015093213A1 (ja) * | 2013-12-20 | 2015-06-25 | 三菱重工業株式会社 | 電源装置及び消費電力推定方法 |
| JP2015130752A (ja) * | 2014-01-08 | 2015-07-16 | 株式会社富士通ゼネラル | 空気調和機 |
| US9197126B2 (en) | 2009-04-01 | 2015-11-24 | Mitsubishi Electric Corporation | Power converting apparatus |
| KR101613537B1 (ko) | 2011-12-31 | 2016-04-19 | 눅테크 컴퍼니 리미티드 | 고압 펄스 변조 전원 및 방법 |
| WO2023131990A1 (ja) * | 2022-01-04 | 2023-07-13 | 三菱電機株式会社 | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004072806A (ja) * | 2002-08-01 | 2004-03-04 | Hitachi Ltd | 電力変換装置 |
-
2006
- 2006-02-28 JP JP2006051577A patent/JP2006304586A/ja active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004072806A (ja) * | 2002-08-01 | 2004-03-04 | Hitachi Ltd | 電力変換装置 |
Cited By (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101066742B1 (ko) | 2007-03-30 | 2011-09-21 | 다이킨 고교 가부시키가이샤 | 전원공급회로 |
| WO2008129798A1 (ja) * | 2007-03-30 | 2008-10-30 | Daikin Industries, Ltd. | 電源供給回路 |
| AU2008242032B2 (en) * | 2007-03-30 | 2011-03-31 | Daikin Industries, Ltd. | Electric Power supply circuit |
| JP2008253102A (ja) * | 2007-03-30 | 2008-10-16 | Daikin Ind Ltd | 電源供給回路 |
| US8270187B2 (en) | 2007-03-30 | 2012-09-18 | Daikin Industries, Ltd. | Electric power supply circuit with PAM waveform correction |
| CN101641859B (zh) * | 2007-03-30 | 2012-07-25 | 大金工业株式会社 | 电源供给电路 |
| KR101066723B1 (ko) | 2007-03-30 | 2011-09-21 | 다이킨 고교 가부시키가이샤 | 전원공급회로 |
| JP2009095160A (ja) * | 2007-10-10 | 2009-04-30 | Mitsubishi Electric Corp | 電力変換装置 |
| JP2010119278A (ja) * | 2008-11-14 | 2010-05-27 | Daikin Ind Ltd | 整流装置 |
| US9197126B2 (en) | 2009-04-01 | 2015-11-24 | Mitsubishi Electric Corporation | Power converting apparatus |
| JP2010273505A (ja) * | 2009-05-25 | 2010-12-02 | Toshiba Corp | 洗濯機のモータ駆動装置 |
| JP2011091947A (ja) * | 2009-10-23 | 2011-05-06 | Panasonic Corp | 直流電源装置 |
| WO2011048818A1 (ja) * | 2009-10-23 | 2011-04-28 | パナソニック株式会社 | 直流電源装置およびこれを用いた電動機駆動用インバータ装置 |
| JP2011115007A (ja) * | 2009-11-30 | 2011-06-09 | Mitsubishi Electric Corp | 交流直流変換装置、それを備えたモーター駆動装置、並びにそのモーター駆動装置を搭載した空気調和機、冷蔵庫、ヒートポンプ式給湯機、洗濯機及び掃除機 |
| JP2011125102A (ja) * | 2009-12-09 | 2011-06-23 | Panasonic Corp | 電動機駆動用インバータ装置 |
| CN102340251A (zh) * | 2010-07-20 | 2012-02-01 | 台达电子工业股份有限公司 | 交流-直流转换器及其控制电路 |
| JP2013081286A (ja) * | 2011-10-03 | 2013-05-02 | Seiko Epson Corp | 発電装置、電子機器、移動手段および発電装置の制御方法 |
| JP2013081281A (ja) * | 2011-10-03 | 2013-05-02 | Seiko Epson Corp | 発電装置、電子機器、移動手段及び発電装置の制御方法 |
| JP5674959B2 (ja) * | 2011-10-28 | 2015-02-25 | 三菱電機株式会社 | 直流電源装置および電動機駆動装置 |
| US9948203B2 (en) | 2011-10-28 | 2018-04-17 | Mitsubishi Electric Corporation | Direct-current power supply device and electric motor driving device |
| WO2013061469A1 (ja) * | 2011-10-28 | 2013-05-02 | 三菱電機株式会社 | 直流電源装置および電動機駆動装置 |
| KR101613537B1 (ko) | 2011-12-31 | 2016-04-19 | 눅테크 컴퍼니 리미티드 | 고압 펄스 변조 전원 및 방법 |
| JP2013201805A (ja) * | 2012-03-23 | 2013-10-03 | Sharp Corp | 同期モータ駆動装置 |
| JP2015033288A (ja) * | 2013-08-06 | 2015-02-16 | 三菱電機株式会社 | 直流電源装置、モータ駆動装置、空気調和装置、冷蔵庫、及びヒートポンプ給湯装置 |
| CN105706350A (zh) * | 2013-12-20 | 2016-06-22 | 三菱重工业株式会社 | 电源装置及消耗功率推算方法 |
| JP2015122839A (ja) * | 2013-12-20 | 2015-07-02 | 三菱重工業株式会社 | 電源装置及び消費電力推定方法 |
| WO2015093213A1 (ja) * | 2013-12-20 | 2015-06-25 | 三菱重工業株式会社 | 電源装置及び消費電力推定方法 |
| CN105706350B (zh) * | 2013-12-20 | 2019-03-08 | 三菱重工制冷空调系统株式会社 | 电源装置及消耗功率推算方法 |
| JP2015130752A (ja) * | 2014-01-08 | 2015-07-16 | 株式会社富士通ゼネラル | 空気調和機 |
| WO2023131990A1 (ja) * | 2022-01-04 | 2023-07-13 | 三菱電機株式会社 | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006304586A (ja) | 直流電源装置 | |
| Cárdenas et al. | Power smoothing in wind generation systems using a sensorless vector controlled induction machine driving a flywheel | |
| Nguyen et al. | Disturbance-rejection-based model predictive control: Flexible-mode design with a modulator for three-phase inverters | |
| JP4992225B2 (ja) | 電源装置 | |
| KR101995864B1 (ko) | 인버터 제어장치 및 그 제어방법 | |
| US8437158B2 (en) | Active rectification output capacitors balancing algorithm | |
| US9257914B2 (en) | Active rectification control | |
| JP3740946B2 (ja) | 電源装置と、電動機駆動装置および空気調和機 | |
| JP6137273B2 (ja) | 電力変換装置、発電システム、制御装置および電力変換方法 | |
| JP2009232591A (ja) | 電動機駆動装置および空気調和機 | |
| JP3980005B2 (ja) | モータ駆動用インバータ制御装置および空気調和機 | |
| EP3223023B1 (en) | Method and apparatus for estimating capacitance of dc link | |
| CN111800037A (zh) | 一种无电解电容控制系统、控制方法、压缩机和制冷设备 | |
| JP2017038841A (ja) | ミシンモーターの電源回路 | |
| CN103004075B (zh) | 整流电路装置 | |
| EP2595298B1 (en) | Rectifier circuit device | |
| CN107667460A (zh) | 用于抑制多电平功率转换器中的电压谐波的方法和设备 | |
| EP2592746B1 (en) | Rectifier device | |
| Rivera et al. | Predictive control of the indirect matrix converter with active damping | |
| JP3733481B2 (ja) | 太陽光発電システム | |
| WO2014034003A1 (ja) | 整流回路装置の制御装置および整流回路装置 | |
| JP4572595B2 (ja) | コンバータ制御方法及びコンバータ制御装置並びに空調機及びその制御方法及び制御装置 | |
| Wang et al. | Simulation of three-phase voltage source PWM rectifier based on direct current control | |
| Kaszewski et al. | State-space current control for four-leg grid-connected PWM rectifiers with active power filtering function | |
| Sousa et al. | Efficiency optimization of a solar boat induction motor drive |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101207 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110201 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110920 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111215 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20111226 |
|
| A912 | Removal of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20120406 |