JP2006331002A - 信号制御装置 - Google Patents
信号制御装置 Download PDFInfo
- Publication number
- JP2006331002A JP2006331002A JP2005152529A JP2005152529A JP2006331002A JP 2006331002 A JP2006331002 A JP 2006331002A JP 2005152529 A JP2005152529 A JP 2005152529A JP 2005152529 A JP2005152529 A JP 2005152529A JP 2006331002 A JP2006331002 A JP 2006331002A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- priority
- intersection
- signal control
- priority vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Landscapes
- Traffic Control Systems (AREA)
Abstract
【課題】 優先車両を円滑に走行させる信号灯器の優先信号制御が適正に行え、また優先車両に対して交差側の交通に与える悪影響が十分に抑えられる信号制御装置を提供する。
【解決手段】 信号制御装置1は、受信部13において、交差点に接近する方向に走行している優先車両6に搭載されている車載機2から送信されてくる走行情報を継続的に取得する。信号制御装置1は、優先車両6が交差点に到達するまでの間に、この優先車両6に対して当該交差点への到達時刻を何度も繰り返し予測し、到達時刻を予測する毎に、予測した到達時刻に応じた優先信号制御を行う。したがって、優先車両6に対する適正な優先信号制御が精度良く行えるとともに、交差側の交通に与える悪影響も十分に抑えられる。
【選択図】 図1
【解決手段】 信号制御装置1は、受信部13において、交差点に接近する方向に走行している優先車両6に搭載されている車載機2から送信されてくる走行情報を継続的に取得する。信号制御装置1は、優先車両6が交差点に到達するまでの間に、この優先車両6に対して当該交差点への到達時刻を何度も繰り返し予測し、到達時刻を予測する毎に、予測した到達時刻に応じた優先信号制御を行う。したがって、優先車両6に対する適正な優先信号制御が精度良く行えるとともに、交差側の交通に与える悪影響も十分に抑えられる。
【選択図】 図1
Description
この発明は、交差点に設置された信号灯器を制御する信号制御装置に関し、特にバスや、多人数で相乗りしている車両(HOV(High Occupancy Vehicle))や、パトカーや救急車等の緊急車両、さらには賃送中のタクシー等の車両(優先車両)を優先的に走行させる信号制御を行う信号制御装置に関する。
従来、交差点に設置された信号灯器に対して、バス等の優先車両を円滑に走行させる優先信号制御を行う信号制御装置が実用化されている。また、最近では、多人数で相乗りしている車両(HOV(High Occupancy Vehicle))、パトカーや救急車等の緊急車両、賃送中のタクシー等を優先車両に加えることも検討されている。この優先信号制御は、簡単に言うと、交差点で優先車両が赤信号で停止する時間、所謂信号停止時間、を短縮し、優先車両を円滑に走行させる信号灯器の制御である。具体的には、交差点に接近してくる優先車両を感知する感知器を交差点からある程度離れた地点、例えば100m程度離れた地点、に設置し、この感知器が優先車両を感知すると、その旨を信号制御装置に通知する。この信号制御装置が、交差点に設置されている信号灯器を制御する。信号制御装置は、感知器で感知された優先車両が交差点に到達する到達時刻を予測する。例えば感知器が優先車両を感知する感知地点と、交差点との距離がLである場合、優先車両の走行速度を予め定めたVとして、感知地点から交差点までの走行に要する時間T(T=L/V)を算出することで到達時刻を予測している。また、感知器の感知地点で優先車両の走行速度を計測する速度計測器を設置し、この速度計測器で計測した優先車両の走行速度Vを用いて、すなわち優先車両の実際の走行速度を用いて、交差点に到達する到達時刻を予測することも行われている。
信号制御装置は、今回予測した優先車両の到達時刻における交差点の信号灯器の状態が、どのような状態であるかを判断する。ここで優先車両に対して、青信号の状態であると判断した場合、優先車両が赤信号で停止させられることなく交差点を通過できるので、特に優先信号制御を行わない。また、黄信号、または赤信号の初期であると判断した場合、優先車両を交差点の手前で停止させることになるので、優先車両が交差点で停止することなく通過できるように、青信号の時間を延長する青信号延長を行う。また、赤信号であり、且つその初期でないと判断した場合も、優先車両を交差点の手前で停止させることになるので、赤信号の時間を短縮する赤信号短縮を行う。この赤信号短縮により、短縮された赤信号から切り換わった青信号で優先車両を交差点で停止させることなく通過させたり、または短縮した赤信号の時間だけ交差点での優先車両の信号停止時間を短縮させることができる。
また、上述の青信号延長を行うと、優先車両の走行方向に交差する交差側の信号灯器の赤信号を延長することになる。このため、青信号を延長する時間(青延長時間)を長くしすぎると、交差側の交通状況に与える悪影響が大きくなり、交差側で渋滞を引き起こすことになる。このため、通常の優先信号制御では青信号延長における青延長時間に対して最大値の制限を設けている。また、上述の赤信号短縮を行うと、赤信号が短縮された時間(赤短縮時間)だけ、優先車両の走行方向に交差する交差側の青信号を短縮することになる。交差側の青信号の時間は、最低限、歩行者等が横断歩道を渡るのに必要な時間確保しなければならない。このため、通常の優先信号制御では赤信号短縮における赤短縮時間に対しても最大値の制限を設けている。
なお、信号制御装置は、設定されている信号制御パラメータで信号灯器を制御しながら、感知器で優先車両が感知されたときに、この優先車両に対する優先信号制御(青信号延長制御、赤信号短縮制御)を行う。言い換えれば、感知器で優先車両が感知されていないときには、設定されている信号制御パラメータに基づいて信号灯器を制御している。
また、1つの経路上にあって連携して制御される複数の信号交差点群において、これら複数の信号交差点群における優先信号制御を1つの感知器で行うことが特許文献1で提案されている。具体的には、複数の信号制御群の一方の端の交差点からある程度離れた場所に感知器を設置し、この感知器が優先車両を感知したときに、この優先車両が一方の端の交差点に到達する時刻を予測する。一方の端の交差点では、ここで予測した時刻に基づいて優先信号制御を行う。また、他の交差点では、優先車両が隣接する上流側の交差点を通過する時刻を予測し、ここで予測した隣接する上流側の交差点の通過時刻を用いて、優先車両の到達時刻を予測し、ここで予測した時刻に基づいて優先信号制御を行う。
なお、各交差点の信号制御装置は、感知器で感知された位置から、他方の端の交差点までの優先車両の走行速度を予め定めた速度Vを用いて優先車両の到達時刻を予測している。
特開2001−307289号公報
しかしながら、従来の優先信号制御は、優先車両が交差点に到達する到達時刻を予測するときに、この優先車両が交差点に到達するまでの走行速度を予め定められた速度や、感知器の感知地点で計測した優先車両の走行速度を用いていた。言い換えれば、優先車両が感知地点から交差点まで一定の走行速度で走行するものとして到達時刻を予測していた。一方、優先車両は、感知地点から交差点まで走行する間に、歩行者や他の車両等の影響を受けて加速することもあれば、一方で減速や一時停止することがある。したがって、優先車両が交差点に到達する到達時刻の予測に用いた優先車両の走行速度と、優先車両の実際の走行速度とにズレが生じやすく、優先車両を円滑に走行させる適正な優先信号制御が行えないという問題があった。例えば、優先信号制御で青信号延長を行ったときに、優先車両が実際に交差点に到達した到達時刻が、予測した到達時刻よりも青延長時間を超える時間遅れた場合、優先車両は交差点で延長された青延長時間だけ長く停止させられてしまうことになる。また、上述したように交差側の赤信号が青延長時間だけ延長されるので、交差側の車両が青延長時間だけ無駄に待たされることになる。また、優先信号制御として赤信号短縮を行ったときに、優先車両が実際に交差点に到達した到達時刻が、予測した到達時刻よりも赤短縮時間を超える時間遅れた場合、優先車両は優先信号制御が行われなくても、交差点で停止することなく通過していた。すなわち、無駄な赤信号短縮が行われたことになる。そして、上述したように赤信号短縮が行われたことで、交差側の青信号が赤短縮時間だけ短縮されているので、青信号が短縮された赤信号の間に交差点に到達した交差側の車両を無駄に待たせることになる。
このように、従来の信号制御装置は、優先車両を円滑に走行させる適正な優先信号が精度良く行えず、また交差側の車両を無駄に待たせる等、交差側の交通に与える悪影響が大きいという問題があった。
この発明の目的は、優先車両を円滑に走行させる信号灯器の優先信号制御が適正に行え、また優先車両に対して交差側の交通に与える悪影響が十分に抑えられる信号制御装置を提供することにある。
この発明の信号制御装置は、上記課題を解決するために以下の構成を備えている。
(1)交差点に接近する方向に走行している優先車両毎に、走行状況を継続的に取得する走行状況取得手段と、
前記走行状況取得手段により継続的に取得されている優先車両毎の走行状況を用いて、優先車両毎に前記交差点に到達する到達時刻を予測する到達時刻予測手段と、
前記到達時刻予測手段により予測された優先車両毎の前記交差点への到達時刻に応じて、この交差点に設置された信号灯器を制御する信号灯器制御手段と、を備えている。
前記走行状況取得手段により継続的に取得されている優先車両毎の走行状況を用いて、優先車両毎に前記交差点に到達する到達時刻を予測する到達時刻予測手段と、
前記到達時刻予測手段により予測された優先車両毎の前記交差点への到達時刻に応じて、この交差点に設置された信号灯器を制御する信号灯器制御手段と、を備えている。
この構成では、走行状況取得手段が、交差点に接近してきている優先車両毎に、その優先車両の走行状況を継続的に取得しているので、優先車両の走行状況が交差点に到達するまでの間に変化しても、その優点先車両が交差に到達するまでの間における走行状況の変化を取得することができる。したがって、優先車両の走行状況が交差点に到達するまでの間に変化しても、到達時刻予測手段が、その変化した走行状況で交差点に到達する到達時刻を予測し直すことができる。そして、信号灯器制御手段が到達時刻予測手段により優先車両が交差点に到達する到達時刻が予測される毎に、ここで予測された到達時刻に応じて信号灯器に対する優先信号制御を行うことで、優先車両に対する適正な優先信号制御が精度良く行える。また、優先車両に対する適正な優先信号制御が行えることで、交差側の交通に与える悪影響も十分に抑えられる。
(2)前記優先車両走行状況取得手段は、前記優先車両から繰り返し送信されてくる、優先車両の識別情報、その時点での走行位置、および時刻を含む走行情報を受信することにより、前記優先車両毎に走行状況を継続的に取得する手段である。
この構成では、交差点に接近してきている優先車両毎に、この優先車両の識別情報、その時点での走行位置、および時刻を含む走行情報を繰り返し取得するので、速度計測器を用いることなく、優先車両の走行速度を得ることができる。
優先車両の走行速度Vは、今回の走行情報における走行位置と前回の走行情報における走行位置との間の距離Lと、今回の走行情報における時刻と前回の走行情報における時刻との時間差Tを用いて、
V=L/T
により、算出できる。また、優先車両が走行速度を走行情報に含ませて送信するようにしてもよい。この場合には、信号制御装置において優先車両の走行速度を算出する必要がない。
V=L/T
により、算出できる。また、優先車両が走行速度を走行情報に含ませて送信するようにしてもよい。この場合には、信号制御装置において優先車両の走行速度を算出する必要がない。
(3)前記優先車両走行状況取得手段は、1または複数のカメラが撮像している前記交差点周辺の撮像画像を処理し、交差点に接近する方向に走行している優先車両を識別するとともに、ここで識別した優先車両毎に走行状況を継続的に取得する手段である。
この構成では、1または複数のカメラで撮像している前記交差点周辺の撮像画像を処理し、交差点に接近する方向に走行している車両毎に、その車両が優先車両であるかどうかを識別する。例えば、バスであれば車両の形状から識別すればよい。また、パトカーや救急車等の緊急車両であれば、赤色灯の有無により識別すればよい。識別した優先車両については、撮像画像を時間的に連続して処理し、走行位置の変化を取得することで、走行位置を継続的に取得できる。また、この走行位置の変化から走行速度を算出することもできる。このように、カメラの撮像画像を処理することによって、交差点に接近してくる方向に走行している車両を追跡し、この優先車両の走行情報を継続的に取得することもできる。
(4)前記到達時刻予測手段は、前記交差点に対して予め定められた周辺エリア内に位置し、交差点に接近する方向に走行している優先車両についてのみ、前記交差点に到達する到達時刻を予測する手段である。
この構成では、予め定められた周辺エリア内を走行していない優先車両については、交差点への到達時刻を予測しないので、周辺エリア外に位置する優先車両に対する優先信号制御を行わない。周辺エリアは、周辺エリア外から周辺エリア内に入った優先車両に対して適正な優先信号制御が行える大きさ、例えば周辺エリア外から周辺エリア内に入った優先車両が交差点に到達するまでに要する時間が100秒程度(70〜130秒程度)である大きさ、に設定される。ここで、交差点からある程度以上離れた位置(周辺エリア外)を走行している優先車両については、この時点で交差点に到達する到達時刻を精度良く予測することは困難である。したがって、交差点に到達する到達時刻を精度良く予測することが困難である優先車両について、交差点への到達時刻を予測するという無駄な処理を行うことがなく、装置本体の処理負荷が抑えられる。
(5)前記信号灯器制御手段は、前記到達時刻予測手段により予測された前記交差点への到達時刻が最も早い優先車両について、この交差点に設置された信号灯器を制御する手段である。
この構成では、複数台の優先車両が交差点に接近してきているとき、最も早く交差点に到達する優先車両に対して優先信号制御を行う。したがって、最も早く交差点に到達した優先車両が、他の優先車両に対する優先信号制御の影響を受けて、交差点で長い時間停止させられるのを防止できる。
(6)前記走行状況取得手段は、優先車両毎に、継続的に取得している優先車両の走行状況に基づいて、この優先車両が交差点に接近する方向に走行している車両であるかどうかを判定し、交差点に接近する方向に走行していない優先車両については処理対象外の優先車両として処理する手段である。
この構成では、交差点に接近する方向に走行していない優先車両については処理対象外の優先車両とするので、無用な優先車両に対する処理負荷を低減することができ、その結果信号制御装置における処理負荷を一層抑えることができる。
この発明によれば、交差点に接近してきている優先車両毎に、その優先車両が交差点に到達するまでの間における走行状況の変化を取得しているので、その変化した走行状況で交差点に到達する到達時刻を予測し直すことができる。したがって、優先車両が交差点に到達する到達時刻が予測される毎に、予測された到達時刻に応じた優先信号制御を行うことで、優先車両に対する適正な優先信号制御が行える。これにより、交差点で赤信号により優先車両を停止させる時間が抑えられるとともに、優先車両に対して交差側を走行している車両を赤信号で無駄に待たせることがなく、優先車両を円滑に走行させることができ、且つ交差側の交通に与える悪影響も十分に抑えられる。
以下、この発明の実施形態である信号制御装置を適用した信号制御システムについて説明する。
図1は、この発明の実施形態である信号制御装置を適用した信号制御システムの概要を説明する図である。この信号制御システムは、交差点に設置されている信号灯器5を制御する信号制御装置1と、優先車両6に搭載されている車載機2と、交差点に進入する車両を撮像するカメラ3と、を備えている。信号制御装置1は、制御する信号灯器5が設置されている交差点に設置されており、車載機2から無線で送信されてくる走行情報(詳細については後述する。)を受信する無線通信機能を有する構成である。信号制御装置1の無線通信エリアは、図1(B)に示すように本体が設置されている交差点を略中心とする半径数km(例えば2〜4km)の範囲である。また、この無線通信エリア内には、周辺エリアが設定されている。周辺エリアは、周辺エリア外から周辺エリア内に入った優先車両6が交差点に到達するまでに要する時間が100秒程度(70〜130秒程度)である大きさである。このように周辺エリアは、優先車両が交差点に到達するまでの時間で規定するので、交差点周辺の地形に応じた形状となり、交差点が周辺エリアの略中心に位置するとは限らない。また、この周辺エリアの大きさは、周辺エリア外から周辺エリア内に入った優先車両6に対する優先信号制御が適正に行える時間で規定している。図1(B)では矩形の周辺エリアを示している。車載機2は、優先車両6に対して発行されている。言い換えれば、この車載機2が搭載されている車両が、ここで言う優先車両6である。また、カメラ3は、交差点の手前を撮像する位置に設置しており、交差点に進入する車両を撮像した撮像画像を信号制御装置1に入力する。
なお、図1(B)に示す複数の直線は、この無線通信エリア内、およびその周辺の道路を示している。また、信号制御装置1は、周辺エリア内の複数の交差点に設置されている。
図2は、この発明の実施形態である信号制御装置の構成を示すブロック図である。信号制御装置1は、装置本体の動作を制御する制御部11と、交差点に設置されている信号灯器5に対して表示(赤、黄、青等)の切り換え等を制御する表示制御部12と、車載機2から送信されてきた走行情報等を受信する受信部13と、カメラ3の撮像画像を処理する画像処理部14と、現在時刻を計時する時計部15と、通信部13で受信した走行情報を一時的に記憶する記憶部16と、を備えている。表示制御部12は、交差点に設置されている信号灯器5毎に、信号制御パラメータや優先信号制御にかかる処理結果等に基づいて表示の切り換えを指示する。交差点の各信号灯器5は、その表示を信号制御装置1からの指示にしたがって切り換える。受信部13は、車載機2と無線通信を行うための構成であり、具体的には車載機2から送信されてきた走行情報を受信するための構成である。画像処理部14は、カメラ3の撮像画像を処理し、交差点手前で優先車両が走行している車線等を判断する。時計部15は、所謂電波時計の機能を有し、予め設定されているタイミングで時刻合わせを行う。記憶部16は、受信部13で受信された優先車両6の走行情報を一時的に記憶するテーブルや、図1(B)に示した周辺エリアを含む道路地図を記憶している。
図3は、この実施形態の信号制御システムにおける車載機の構成を示すブロック図である。車載機2は、本体の動作を制御する制御部21と、走行情報等を無線で送信する送信部22と、現在時刻を計時する時計部23と、現在位置を検出する位置検出部24と、を備えている。この車載機2は上述したように優先車両6に対して発行されており、この車載機2が搭載されている車両がここで言う優先車両6に相当する。車載機2は、例えばバス、多人数で相乗りする車両(HOV(High Occupancy Vehicle))、パトカーや救急車等の緊急車両や、タクシーに対して発行すればよい。但し、タクシーに発行する車載機2については、賃送中のみ有効になる構成としてもよい。例えば、一般的なタクシーでは、賃送、空車、回送等を表示する表示器が設けられているので、この表示器の表示状態を検出する構成、および表示状態が賃送であるときに本体各部に対して動作電源を供給する構成を車載機2に設けてもよい。制御部21には、図示していない不揮発性のメモリが設けられており、この不揮発性のメモリには車載機2を識別する識別コードが記憶されている。送信部22は、信号制御装置1に対して走行情報を無線送信するための構成である。時計部23は、信号制御装置1の時計部15と同様に電波時計の機能を有し、予め設定されているタイミングで時刻合わせを行う。信号制御装置1の時計部15と車載機2の時計部23とが時刻合わせを行うタイミングについては、同じであってもよいし、異なっていてもよい。位置検出部24は、所謂GPS機能を有し、現在位置の緯度、経度を取得することができる。この実施形態の車載機2は、一定時間毎、例えば1秒毎、に自機を識別する識別コード、この時点で時計部23が計時している時刻、およびこの時点で位置検出部24により検出した位置を含む走行情報を送信部22から送信する。識別コードは、この車載機2が搭載された優先車両6を識別する情報として利用できる。また、車載機2は優先車両6のエンジンがかかっているいるときに動作する構成である。車載機2は、優先車両6のエンジンがかかっていないとき、時計部23における計時や、優先車両6のエンジンの状態検知等の一部の構成のみ動作させながら、優先車両6のエンジンがかけられるのを待っている。このように、車載機2は、優先車両6のエンジンがかかっていないとき、走行情報を送信しない構成である。
以下、この信号制御システムの動作について説明する。信号制御装置1は、予め定められたタイミングになると(例えば毎正時や、数分毎や、午前0時になると)、時計部15の時刻を合わせる。また、車載機2も予め定められたタイミングになると、時計部23の時刻を合わせる。このように、信号制御装置1および車載機2は、予め定められたタイミングになると、時計部15、23の時刻合わせを行うので、信号制御装置1の時計部15が計時している時刻と、車載機2の時計部23が計時している時刻と、は略一致している。時計部15、23が行う時刻合せにかかる処理は、周知のように時刻情報が載せられている標準電波を受信し、計時している時刻を、この標準電波に載せられている時刻情報に基づく時刻に合わせる処理である。
なお、信号制御装置1の時計部15が時刻合わせを行うタイミングと、車載機2の時計部23が時刻合せを行うタイミングと、は同じタイミングであってもよいし、異なるタイミングであってもよい。また、車載機2は、搭載されている優先車両6のエンジンがかけられたときに、時計部23の時刻合せを行うようにしてもよい。
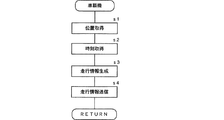
図4は、車載機における走行情報の送信処理を示すフローチャートである。この実施形態の車載機2は、図4に示す送信処理を一定時間毎(例えば、10秒毎、1秒毎、100ミリ秒毎)に繰り返し実行する。車載機2は、走行情報の送信タイミングになると(前回の送信処理から一定時間経過すると)、位置検出部24において搭載されている車両の位置(緯度、経度)を取得する(s1)。また、車載機2は、時計部23が計時している時刻を取得する(s2)。そして、車載機2は、s1で取得した位置(この時点における搭載されている優先車両6の位置)、s2で取得した時刻(この時点で時計部23が計時している時刻)、および自機を識別する識別コードを含む走行情報を生成し(s3)、s4で生成した走行情報を送信部22から送信する(s4)。
このように、この実施形態では、車載機2は走行情報を一定時間毎に送信する。また、車載機2が送信する走行情報には、車載機2を識別する識別コード、その時点(走行情報の送信時点)における優先車両6の位置、および時刻が含まれている。この車載機2の識別コードは、車載機2が搭載されている優先車両6の識別コードとして利用することもできる。
なお、車載機2が走行情報を送信するタイミングについては、一定時間毎にせずに、例えば搭載されている優先車両6が一定距離走行する毎に走行情報を送信する構成としてもよい。この場合には、車載機2には優先車両6の走行距離を取得する構成を設ければよい。例えば、優先車両6の走行距離計測部から走行距離を取得する構成を車載機2に設ければよい。
また、車載機2は、予め定められたエリア内に位置しているときに、走行情報を送信する一定時間間隔を短くするように構成してもよい。例えば、このエリア外では走行情報を送信する時間間隔を10秒とし、このエリア内では走行情報を送信する時間間隔を1秒とするように構成してもよい。この場合、走行情報を送信する時間間隔を短くするエリアを交差点に近いエリアや、車両の平均速度が比較的速いエリア(単位時間当たりの走行距離が長いエリア)にするのが望ましい。さらに、この実施形態では、走行情報を送信するときに、その時点における優先車両6の位置、および時刻を取得するとしたが、走行情報を送信するタイミングと、優先車両6の位置および時刻を取得するタイミングと、を異なるタイミングにしてもよい。
次に、信号制御装置1の動作について説明する。信号制御装置1は、優先車両6に搭載されている車載機2から送信されてきた走行情報を受信する走行情報受信処理と、交差点(以下、当該交差点と言う。)に設置されている信号灯器5に対して優先信号制御を行う優先信号制御処理と、を同時に実行する。まず、走行情報受信処理について説明する。
図5は、この発明の実施形態である信号制御装置における走行情報受信処理を示すフローチャートである。信号制御装置1は、優先車両6に搭載されている車載機2から送信されてきた走行情報を受信するのを待っている(s11)。信号制御装置1は、走行情報を受信すると、今回受信した走行情報から優先車両6の位置(緯度、経度)を取得し(s12)、ここで取得した位置が周辺エリア内であるかどうかを判定する(s13)。信号制御装置1は、上述したように、記憶部16に周辺エリアを含む道路地図を記憶している。この道路地図には、周辺エリアや、後述するマスク領域等が設定されている。信号制御装置1は、例えばs12で取得した優先車両6の位置を、この地図上にプロットすることで、優先車両6の位置が周辺エリア内であるかどうかを判定する。信号制御装置1は、s13で優先車両6の位置が周辺エリア外であると判定すると、今回受信した走行情報を破棄し(s14)、s11に戻る。s14では、当該交差点からある程度以上離れた優先車両6に搭載されている車載機2から送信されてきた走行情報を破棄している。当該交差点からある程度以上離れた場所に位置する優先車両6については、当該交差点を通過する優先車両6であるかどうかを正確に判定することが困難であり、またこの優先車両6が仮に当該交差点を通過する優先車両であっても、この時点で当該交差点に到達する到達時刻を精度良く予測することも困難である。したがって、信号制御装置1が周辺エリア外に位置する優先車両6を後述する優先信号制御処理の対象車両にしても、適正な優先信号制御を行うことが困難である。言い換えれば、この優先車両6を対象車両として優先信号制御処理を行っても、この処理が無駄になる可能性が高い。そこで、この実施形態の信号制御装置1は、周辺エリア外に位置する優先車両6を後述する優先信号制御処理の処理対象の車両としないために、s13およびs14にかかる処理を実行し、装置本体の負荷を抑えている。また、周辺エリアは、上述したように、その大きさを周辺エリア外から周辺エリア内に入った優先車両6に対する優先信号制御が適正に行える時間で規定しているので、周辺エリア外に位置する優先車両6を処理対象外の車両としても何ら問題が生じない。
信号制御装置1は、s13で優先車両6が周辺エリア内に位置すると判定すると、今回受信した走行情報を送信してきた車載機2の識別コードが記憶部16に記憶されているかどうかを判定する(s15)。記憶部16には、周辺エリア内に位置する優先車両6に搭載されている車載機2の識別コードに対応付けて、この車載機2から送信されてきた走行情報から取得した優先車両6の位置および時刻を蓄積的に記憶するテーブルが記憶されている。このテーブルは、図6に示すように、周辺エリア内に位置する優先車両6毎にレコードが登録されるテーブルであり、各レコードには車載機2の識別コードに、この車載機2から送信されてきた走行情報から取得した優先車両6の位置および時刻が対応付けられている。この図6では、より新しい走行情報から取得した優先車両6の位置および時刻を右側に記憶している。信号制御装置1は、走行情報が一定時間以上送信されてこない車載機2のレコードについてはテーブルから削除する。これにより、信号制御装置1は、周辺エリア内から外に出た優先車両6に搭載されている車載機2から送信されてきた走行情報をいつまでも記憶しつづけることがないので、記憶部16の記憶領域を有効に利用することができる。s15にかかる処理は、車載機2が搭載されている優先車両6が周辺エリア内に入って、最初に送信してきた走行情報であるかどうかを判定している。
信号制御装置1は、s15で記憶部16のテーブルに識別コードが記憶されていないと判定すると、すなわち該当するレコードがないと判定すると、今回受信した走行情報に基づいて、識別コードに優先車両6の位置および時刻を対応付けたレコードをテーブルに登録する(s16)。一方、s15で記憶部16のテーブルに識別コードが記憶されていると判定すると、すなわち該当するレコードが登録されていると判定すると、前回受信した走行情報から取得した優先車両6の位置と、今回受信した走行情報から取得した優先車両6の位置と、を用いて、優先車両6の走行方向が当該交差点に接近する方向であるかどうかを判断する(s17)。s17では、前回受信した走行情報から取得した優先車両6の位置と、今回受信した走行情報から取得した優先車両6の位置とを結ぶ移動ベクトルの向きにより、当該交差点に接近する方向に走行している優先車両であるかどうかを判定する。例えば、当該交差点の位置と前回受信した走行情報から取得した優先車両6の位置とを結ぶ直線と、上述の移動ベクトルと、のなす角(狭い方の角度)が45度以内であれば当該交差点に接近する方向に走行していると判定し、この角が45度を超えていれば当該交差点に接近する方向に走行していないと判定する。
信号制御装置1は、s17で、優先車両6の走行方向が当該交差点に接近する方向でないと判定すると、テーブルに登録されている該当する識別コードのレコードに対して、すでに記憶している優先車両6の位置および時刻を全て削除するとともに、今回受信した走行情報から取得した優先車両6の位置および時刻をこのレコードに記憶する(s18)。これにより、s17で当該交差点に接近する方向でないと判定された優先車両6に搭載されている車載機2のレコードは、今回受信した走行情報から取得した優先車両6の位置および時刻のみが記憶されたレコードとなる。当該交差点に接近する方向に走行していない優先車両6は、当該交差点を通過しない優先車両6であると考えられる。したがって、信号制御装置1が当該交差点に向かっていない優先車両6を対象車両とすると、この優先車両6に対して無駄な優先信号制御処理を行うことになる。そこで、この実施形態の信号制御装置1は、当該交差点に向かっていない優先車両6を優先信号制御処理の対象車両としないために、s18にかかる処理を行っている。これにより、信号制御装置1本体の負荷を抑えている。
なお、s17で今回受信した走行情報から取得した優先車両6の位置および時刻をこのレコードに記憶するようにしているのは、当該交差点に向かって走行している優先車両6が、何らかの理由でバックしたり、回り道をすることがあるため、このような優先車両6に搭載されている車載機2から今度走行情報を受信したときに、s17にかかる処理が行えるようにしている。
一方、s17で当該交差点に接近する方向であると判定すると、この優先車両6が走行している道路が当該交差点に繋がっている道路であるかどうか、例えば当該交差点に繋がっている道路と平行に走っている道路であり、当該交差点に繋がっていない道路でないかどうかを判定する(s19)。s19で、当該交差点に繋がっていない道路であると判定すると、上述したs18にかかる処理を実行する。当該交差点に繋がっていない道路を走行している優先車両6は、その位置が周辺エリア内であっても後述する優先信号制御処理の処理対象にする必要がない。しかし、当該交差点に繋がっていない道路を走行している車両であっても、回り道をして当該交差点に向かって走行してくる可能性があるので、このような優先車両6に搭載されている車載機2から今度走行情報を受信したときに、s17や、s19にかかる処理が行えるようにしている。信号制御装置1は、s19で当該交差点に繋がっている道路であると判定すると、今回受信した走行情報から取得した優先車両6の位置、および時刻を該当するレコードに追加記憶する(s20)。信号制御装置1は、s16、s18、s20にかかる処理を完了すると、s11に戻る。
なお、この実施形態では、信号制御装置1が今回走行情報を受信した車載機2が搭載されている優先車両6について走行方向を判断する構成としたが、車載機2が送信する走行情報に優先車両6の走行方向を含ませるようにしてもよい。この場合には、車載機2が、前回走行情報を送信するときに位置検出部24で検出した位置と、今回走行情報を送信する際に位置検出部24で検出した位置とから、優先車両6の走行方向を判断し、ここで判断した走行方向を走行情報に含めて送信するようにすればよい。また、車載機2の識別コードと、この車載機2が搭載されている優先車両6の走行経路と、を対応付けて信号制御装置1に予め設定しておき、信号制御装置1がこの情報に基づいて当該交差点を通過する優先車両6であるかどうかを判定する構成としてもよい。このようにすれば、信号制御装置1の負荷を一層抑えることができる。さらに、優先車両6がバスである場合には、バスの路線毎にその経路を信号制御装置1に記憶させておき、車載機2が路線系統を走行情報に含ませて送信するようにしてもよい。
信号制御装置1は、上述したように車載機2が走行情報を一定時間毎に送信するので、当該交差点に接近する方向に走行している優先車両6の走行状況を継続的に取得することができる。
次に、信号制御装置1における優先信号制御処理について説明する。図7は、この発明の実施形態である信号制御装置の優先信号制御処理を示すフローチャートである。この実施形態の信号制御装置1は、この優先信号制御処理を一定時間毎、例えば1秒毎、に行う。また、上述したように、走行情報受信処理と、この優先信号制御処理と、は同時に実行している。
なお、この優先信号制御処理については、一定時間毎ではなく、走行情報を受信する毎に行うようにしてもよい。
信号制御装置1は、周辺エリア内に位置し、当該交差点に接近する方向に走行している優先車両6を、優先信号制御の対象車両として取得する(s31)。s31では、記憶部16のテーブルにおいて、複数の走行情報から取得された優先車両6の位置、および時刻が記憶されているレコードを抽出し、ここで抽出したレコードに対応する車載機2が搭載されている優先車両6を優先信号制御の対象車両として取得する。したがって、上述した走行情報受信処理のs17で当該交差点に接近する方向に走行していないと判定された優先車両6や、s19で当該交差点に繋がっていない道路を走行していると判定された優先車両6については、優先信号制御の対象車両にならない。また、周辺エリア内に位置するが、これまでに走行情報が1回しか受信されていない優先車両6も優先信号制御の対象にならない。
信号制御装置1は、s31で取得した優先信号制御の対象車両毎に当該交差点に到達する到達時刻を予測する(s32、s33)。s32では、s31で取得した対象車両毎に、走行速度を算出するとともに、当該交差点までの距離を算出し、これらに基づいて当該交差点への到達時刻を予測する。具体的には、対象車両毎に、この対象車両の位置を、記憶部16に記憶している周辺エリアの地図上にプロットする。記憶部16に記憶されている周辺エリアの地図には、車両の走行速度が一時的に急激に変化する場所、例えば坂の頂上や底、急激なカーブ、がマスク領域として設定されている。信号制御装置1は、マスク領域内でない優先車両6の位置を2つ抽出する。このとき、信号制御装置1は、より遅く受信した走行情報、すなわちより新しい走行情報、から取得した対象車両の位置を2つ抽出する。例えば、最後に受信した走行情報から取得した位置がマスク領域内でなく、この走行情報より1回前に受信した走行情報から取得した位置もマスク領域内でなければ、これら2つの走行情報から取得した位置を抽出する。また、最後に受信した走行情報から取得した位置がマスク領域内であって、この走行情報より1回前、および2回前に受信した走行情報から取得した位置がともにマスク領域内でなければ、1回前、および2回前に受信した走行情報から取得した位置を抽出する。さらに、最後に受信した走行情報から取得した位置がマスク領域内でなく、1回前に受信した走行情報から取得した位置がマスク領域内であり、2回前に受信した走行情報から取得した位置がマスク領域内でなければ、最後および2回前に受信した走行情報から取得した位置を抽出する。
信号制御装置1は、ここで抽出した2つの位置間の距離L1を取得するとともに、この2つの位置を取得した走行情報から取得した時刻の差(時間差T1)を算出する。この距離L1は、道路に沿った距離である。信号制御装置1は、この優先車両6の走行速度V1を、
V1=L1/T1
により算出する。このとき、走行速度がマイナスになったり、走行速度を算出する2つの位置が特定できない優先車両6については、予め定められている走行速度を設定する。
V1=L1/T1
により算出する。このとき、走行速度がマイナスになったり、走行速度を算出する2つの位置が特定できない優先車両6については、予め定められている走行速度を設定する。
また、信号制御装置1は、最後に受信した走行情報から取得した優先車両6の位置と、当該交差点との距離L2を取得し、この優先車両が交差点に到達するまでに要する時間T2を、
T2=L2/V1
により算出する。この距離L2も、道路に沿った距離である。そして、ここで算出した時間T2を、最後に受信した走行情報から取得した時刻に加えた時刻を、この優先車両6が当該交差点に到達する到達時刻として予測する。
T2=L2/V1
により算出する。この距離L2も、道路に沿った距離である。そして、ここで算出した時間T2を、最後に受信した走行情報から取得した時刻に加えた時刻を、この優先車両6が当該交差点に到達する到達時刻として予測する。
このように、信号制御装置1は、優先車両6の走行速度が一時的に急激に変化する場所をマスク領域とし、このマスク領域に位置しているときの走行情報を用いないで、この優先車両6について当該交差点に到達する到達時刻を予測する構成としたので、優先車両6が当該交差点に到達する到達時刻を精度良く算出することができる。
信号制御装置1は、s31で取得した優先信号制御の対象とする全ての優先車両6について、当該交差点への到達時刻を予測すると、予測した到達時刻が最も速い優先車両6を優先信号制御の対象車両に決定する(s34)。信号制御装置1は、s34で優先信号制御の対象車両に決定した優先車両6について予測した当該交差点に到達する到達時刻に、この優先車両6に対する信号灯器5の表示が青信号であるかどうかを判定する(s35)。信号制御装置1は、青信号であると判定すると、s34で優先信号制御の対象車両に決定した優先車両6については、特に優先信号制御を行わなくても交差点で停止させることがないので、本処理を終了する。
一方、s35で青信号でないと判定すると、優先信号制御の方法として青信号の時間を延長する青信号延長が適当であるかどうかを判定する(s36)。s36では、s34で優先信号制御の対象車両に決定した優先車両6に対して、予測した到達時刻が、黄信号または赤信号の初期であり、且つ青信号延長の最大値以内であれば、青信号延長が適正であると判定する。すなわち、青信号延長により優先車両6を交差点で停止させることなく通過させることができる場合に青信号延長が適正であると判定する。信号制御装置1は、s36で青信号延長が適正な手法であると判定すると、青信号を所定時間延長する(s37)。この所定時間は、この優先信号制御処理を実行するサイクル(例えば、1秒)と同じ時間である。すなわち、図8(A)に示す状態であれば、青信号延長が適正であると判断し、青信号延長を行う。図8(A)は、当該交差点で青信号延長が行われていないときの優先車両6に対する信号灯器5の状態を示しており、図8(B)は当該交差点で青信号延長が行わたときの優先車両6に対する信号灯器5の状態を示している。
但し、ここで延長される青信号の時間は、この優先信号制御処理を実行するサイクルと同じ時間であることから、s34で優先信号制御の対象車両に決定した優先車両6が当該交差点に到達する予測時刻に、青信号になるとは限らない。しかし、この優先信号制御処理が青信号を延長した時間後に再度実行されるので、この再度実行された優先信号制御処理で同様に青信号延長が適正であると判定された場合、再度青時間が延長される。この優先信号制御処理は、対象車両が当該交差点に到達するまで、一定時間毎に繰り返されるので、s37で青信号を延長した結果が、s34で優先信号制御の対象車両に決定した優先車両6が当該交差点に到達する予測時刻に、青信号にならないものとなっていても、特に問題は生じない。
また、s35で青信号延長が適正でないと判定すると、赤信号を短縮する赤信号短縮が適正であるかどうかを判定する(s38)。s38では、s34で優先信号制御の対象車両に決定した優先車両6に対して予測した到達時刻が、赤信号の終了近くであり、且つ赤信号短縮の最大値以内であれば、赤信号短縮が適正であると判定する。すなわち、赤信号短縮により優先車両6を交差点で停止させることなく通過させることができる場合に赤信号短縮が適正であると判定する。信号制御装置1は、s37で赤信号短縮が適正な方法であると判定すると、s34で優先信号制御の対象車両に決定した優先車両6について予測した到達時刻に青信号にかわるように、赤信号を短縮する時間を設定する赤信号短縮を行う(s39)。具体的には、ここで優先信号制御を行わない場合に青信号にかわる時刻から、予測した到達時刻を差し引いた時間を、赤信号を短縮する時間に設定する。すなわち、図9(A)に示す状態であれば、赤信号短縮が適正であると判断し、赤信号短縮を行う。図9(A)は、当該交差点で赤信号短縮が行われていないときの優先車両6に対する信号灯器5の状態を示しており、図9(B)は当該交差点で赤信号短縮が行わたときの優先車両6に対する信号灯器5の状態を示している。
また、s38で赤信号短縮が適正でないと判定すると、赤信号を延長する赤信号延長と、青信号を延長する青信号延長の組み合わせ制御(赤信号延長+青信号延長)が適正であるかどうかを判定する(s40)。s40では、s34で優先信号制御の対象車両に決定した優先車両6に対して予測した到達時刻が、赤信号であり、青信号延長時間の最大値を超えているいる場合であって、青信号延長の最大値と、赤信号延長の最大値(交差側の青信号延長の最大値)との和の時間内であれば、赤信号を所定時間短縮するとともに、青時間を所定時間延長する(s41)。すなわち、図10に示す状態であれば、赤信号延長+青信号延長が適正であると判断し、この赤信号延長+青信号延長を行う。この制御では、優先車両がやや遠方にあって赤信号時に、赤信号延長の最大値を限度に赤信号延長を行い、優先車両が交差点に接近し、青信号時に、青信号延長の最大値を限度に青信号延長を行う。各々の延長のアルゴリズムは前記青信号延長と同じである。図10(A)は、当該交差点で赤信号延長+青信号延長が行われていないときの優先車両6に対する信号灯器5の状態を示しており、図10(B)は当該交差点で赤信号延長が行わたときの優先車両6に対する信号灯器5の状態を示している。赤信号、および青信号を延長する時間は、この優先信号制御処理を実行するサイクルと同じ時間であるので、s34で優先信号制御の対象車両に決定した優先車両6が当該交差点に到達したときに、青信号になるとは限らない。しかし、この優先信号制御処理は、一定時間毎(赤信号、および青信号を延長した所定時間毎)に繰り返されるので、s41で赤信号、および青信号を延長した結果が、s34で優先信号制御の対象車両に決定した優先車両6が当該交差点に到達したときに、青信号にならないものとなっても、特に問題は生じない。
また、この赤信号延長+青信号延長にかかる優先信号制御は、渋滞時等においては、好ましくないので、実行を禁止するようにしてもよい。渋滞時の判断は、交通量が予め定めた閾値を超えているかどうかにより行うようにすればよい。交差点の交通量は、カメラ3で撮像されている交差点手間の画像を処理して判断すればよい。また、閾値については、過去の交通状況を用いて算出するようにしてもよい。例えば、交通管制センタに蓄積されている最近3カ月の交通データから、天候と曜日毎に1kmを超える渋滞が発生したときの交通量の90%を閾値にする。
さらに、s40で赤信号延長+青信号延長が適正でないと判定した場合は、青信号を短縮する青信号短縮と、赤信号を短縮する赤号短縮の組み合わせ制御(青信号短縮+赤信号短縮)を行う(図11参照)。具体的には、優先車両がやや遠方にあって青信号時に、青信号短縮の最大値を限度に青信号短縮を行い、優先車両が交差点に接近し、赤信号時に、赤信号短縮の最大値を限度に赤信号短縮を行う。青信号短縮の最大値は、交差側の赤信号短縮の最大値とする。各々の短縮のアルゴリズムは前記赤信号短縮と同じである。この青信号短縮+赤信号短縮にかかる制御は、青信号短縮によって交差点で停止させられる車両の台数が増加することから、この青信号短縮により停止させられた車両の影響を受けて、優先車両の発振が遅れ、結果的に優先車両6が交差点を通過するタイミングが遅れることがある。このような場合には、この青信号短縮+赤信号短縮による優先信号制御を禁止するようにしてもよい。青信号短縮の影響を受けて停止させられる車両の台数や、青信号短縮の時間は、青信号短縮の前には分からないため、前回の信号周期の交通量を用いて次式で禁止するかどうかを判定する。
TA<(Q×LA)/W+(Q×LA)×VA
TA:青信号短縮の時間
Q:青信号短縮の影響を受けて停止させられる車両の台数
LA:停車時の平均車頭間隔
W:発進波(前方の車両が発進した後に、当該車両が発進するまでに時間遅れがあり、この発進タイミングが前方の車両から後ろの方の車両へ伝わる波、通常は4m/s前後の設定値を用いる。)
VA:車両の平均速度
この式は、青信号短縮により優先車両6の前に増えた停止車両によって、優先車両6の発進時刻が遅れる時間と、優先車両6の停止位置が上流になることで青信号になってから余分に走行することになる時間と、の和が青信号短縮時間よりも大きいかどうかを示しており、これらの時間の和が青信号短縮時間よりも大きければ青信号短縮+赤信号短縮による優先信号制御を禁止するようにすればよい。また、青信号短縮+赤信号短縮による優先信号制御を禁止したときには、赤信号延長+青信号延長による優先信号制御を行うようにすればよい。
TA<(Q×LA)/W+(Q×LA)×VA
TA:青信号短縮の時間
Q:青信号短縮の影響を受けて停止させられる車両の台数
LA:停車時の平均車頭間隔
W:発進波(前方の車両が発進した後に、当該車両が発進するまでに時間遅れがあり、この発進タイミングが前方の車両から後ろの方の車両へ伝わる波、通常は4m/s前後の設定値を用いる。)
VA:車両の平均速度
この式は、青信号短縮により優先車両6の前に増えた停止車両によって、優先車両6の発進時刻が遅れる時間と、優先車両6の停止位置が上流になることで青信号になってから余分に走行することになる時間と、の和が青信号短縮時間よりも大きいかどうかを示しており、これらの時間の和が青信号短縮時間よりも大きければ青信号短縮+赤信号短縮による優先信号制御を禁止するようにすればよい。また、青信号短縮+赤信号短縮による優先信号制御を禁止したときには、赤信号延長+青信号延長による優先信号制御を行うようにすればよい。
なお、上記式において、前回の信号周期の交通量だけを用いて判定するのではなく、数回前の信号周期の交通量の平均を用いるようにしてもよい。また、所定回数以上つづけて、青信号短縮により優先車両6の前に増えた停止車両によって、優先車両6の発進時刻が遅れる時間と、優先車両6の停止位置が上流になることで青信号になってから余分に走行することになる時間と、の和が青信号短縮時間よりも大きくなったときに、青信号短縮+赤信号短縮による優先信号制御を禁止するようにしてもよい。
このように、この実施形態の信号制御装置1は、優先車両6が交差点に到達するまでの間に、この優先車両6に対して当該交差点への到達時刻を何度も繰り返し予測し、到達時刻を予測する毎に、予測した到達時刻に応じた優先信号制御を行う。したがって、当該交差点に到達するまでに優先車両6の走行状況が変化しても、その変化に応じた優先信号制御が行える。これにより、優先車両6に対する適正な優先信号制御が精度良く行えるとともに、交差側の交通に与える悪影響も十分に抑えられる。
また、複数台の優先車両6が当該交差点に接近してきているときには、最も早く当該交差点に到達する優先車両6に対して優先信号制御を行うようにしたので、当該交差点に最も早く到達した優先車両6が、他の優先車両6に対する優先信号制御の影響を受けて、交差点で長い時間停止させられるということもない。
また、周辺エリア内や、当該交差点に接近する方向に走行していない優先車両6については、優先信号制御の処理対象の車両としないので、装置本体で無駄な処理が行われるのを防止でき、装置本体の負荷が抑えられる。
また、この優先信号制御では、優先信号処理を実行したときの信号周期に対して優先信号制御が行えるので、優先車両6が当該交差点に到達するときの信号周期に対する優先信号制御だけでなく、この信号周期よりも1つ前や2つ前の信号周期に対する優先信号制御も行える。したがって、略確実に、当該交差点でこの優先車両6を赤信号で停止させることなく、通過させることができる。
なお、上記実施形態では、車載機2が信号制御装置1に走行情報を送信し、信号制御装置1が受信した走行情報を用いて優先信号制御処理を行う構成としたが、車載機2が走行情報を交通管制センタに送信し、交通管制センタが上述した優先信号制御処理を行い、その結果に基づいてを信号制御装置1に優先信号制御を指示するように構成してもよい。また、優先車両6がバス等である場合には、バスの運行を管理している運行管理センタを介して走行情報を交通管制センタに送信するように構成してもよい。
また、カメラ3で撮像されている画像を処理し、優先車両6が右折レーンを走行していることを検知したときや、優先車両6が右車線に車線変更したことを検知したとき等に、右折矢印による優先信号制御を行うようにしてもよい。
さらに、上記実施形態では、当該交差点への到達時刻が最も早い優先車両6を、優先信号制御の処理対象に決定するとしたが、他の方法で優先信号制御の処理対象に決定する優先車両6を決定してもよい。例えば、優先車両6がバスである場合、急行、普通等の運行形態の違いや、路線バス、空港バス等の種別の違いや、事業者の違いや、遅れ時間等から優先信号制御の処理対象に決定するバス(優先車両6)を決定してもよい。また、周辺エリア内に入った順番で優先信号制御の処理対象に決定する優先車両6を決定してもよい。
また、上記実施形態では、優先車両6に搭載されている車載機2から送信されてくる走行情報により、交差点に接近してくる方向に走行している優先車両6の走行状況を継続的に取得するとしたが、交差点周辺をカメラで撮像した撮像画像を処理して、交差点に接近してくる方向に走行している優先車両6の走行状況を継続的に取得するようにしてもよい。この場合、図1(B)に示す周辺エリア内において、交差点に接近する方向に走行している車両が追跡できるように、1または複数のカメラを周辺エリア内に設置する。信号制御装置1は、画像処理部14において、1または複数のカメラで撮像されている撮像画像を一定時間毎に処理し、撮像されている車両毎にその位置の変化を取得し、周辺エリア内における車両を追跡する。この追跡は、優先車両についてのみ行えばよく、優先車両でない一般車両については処理対象外の車両として無視すればよい。カメラの撮像画像において撮像されている車両が優先車両であるかどうかの識別は、バスであれば撮像画像における車両の形状から識別すればよい。また、パトカーや救急車等の緊急車両であれば、撮像画像において車両に赤色灯がついているかどうかで識別すればよい(赤色灯がついている車両を緊急車両と識別する。)。
車両の追跡は、撮像画像から優先車両6の走行位置を継続的に取得することにより行う。また、優先車両6の走行速度は、継続的に取得した走行位置の変化から算出することができる。これにより、信号制御装置1は、上記実施形態と同様に、交差点に接近してくる方向に走行している優先車両6の走行情報を継続的に取得することができる。信号制御装置1は、継続的に取得している優先車両6の走行情報を用いて、上記実施形態で説明した優先信号制御を行う。
したがって、上記実施形態と同様に、交差点に接近してきている優先車両6毎に、その優先車両6が交差点に到達するまでの間における走行状況の変化を取得し、その変化した走行状況で交差点に到達する到達時刻を予測し直すことができる。これにより、優先車両6が交差点に到達する到達時刻が予測される毎に、予測された到達時刻に応じた優先信号制御を行うことで、優先車両に対する適正な優先信号制御が行える。よって、交差点で赤信号により優先車両6を停止させる時間が抑えられるとともに、優先車両6に対して交差側を走行している車両を赤信号で無駄に待たせることがなく、優先車両を円滑に走行させることができ、且つ交差側の交通に与える悪影響も十分に抑えられる。
なお、この場合には、優先車両6に車載機2を搭載する必要がない。
1−信号制御装置
2−車載機
5−信号灯器
6−優先車両
11−制御部
12−表示制御部
13−受信部
14−画像処理部
15−時計部
16−記憶部
21−制御部
22−送信部
23−時計部
24−位置検出部
2−車載機
5−信号灯器
6−優先車両
11−制御部
12−表示制御部
13−受信部
14−画像処理部
15−時計部
16−記憶部
21−制御部
22−送信部
23−時計部
24−位置検出部
Claims (6)
- 交差点に接近する方向に走行している優先車両毎に、走行状況を継続的に取得する走行状況取得手段と、
前記走行状況取得手段により継続的に取得されている優先車両毎の走行状況を用いて、優先車両毎に前記交差点に到達する到達時刻を予測する到達時刻予測手段と、
前記到達時刻予測手段により予測された優先車両毎の前記交差点への到達時刻に応じて、この交差点に設置された信号灯器を制御する信号灯器制御手段と、を備えた信号制御装置。 - 前記優先車両走行状況取得手段は、前記優先車両から繰り返し送信されてくる、優先車両の識別情報、その時点での走行位置、および時刻を含む走行情報を受信することにより、前記優先車両毎に走行状況を継続的に取得する手段である請求項1に記載の信号制御装置。
- 前記優先車両走行状況取得手段は、1または複数のカメラが撮像している前記交差点周辺の撮像画像を処理し、交差点に接近する方向に走行している優先車両を識別するとともに、ここで識別した優先車両毎に走行状況を継続的に取得する手段である請求項1に記載の信号制御装置。
- 前記到達時刻予測手段は、前記交差点に対して予め定められた周辺エリア内に位置し、交差点に接近する方向に走行している優先車両についてのみ、前記交差点に到達する到達時刻を予測する手段である請求項2、または3に記載の信号制御装置。
- 前記信号灯器制御手段は、前記到達時刻予測手段により予測された前記交差点への到達時刻が最も早い優先車両について、この交差点に設置された信号灯器を制御する手段である請求項1〜4のいずれかに記載の信号制御装置。
- 前記走行状況取得手段は、優先車両毎に、継続的に取得している優先車両の走行状況に基づいて、この優先車両が交差点に接近する方向に走行している車両であるかどうかを判定し、交差点に接近する方向に走行していない優先車両については処理対象外の優先車両として処理する手段である請求項1〜5のいずれかに記載の信号制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005152529A JP2006331002A (ja) | 2005-05-25 | 2005-05-25 | 信号制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005152529A JP2006331002A (ja) | 2005-05-25 | 2005-05-25 | 信号制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006331002A true JP2006331002A (ja) | 2006-12-07 |
Family
ID=37552640
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005152529A Pending JP2006331002A (ja) | 2005-05-25 | 2005-05-25 | 信号制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006331002A (ja) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008305084A (ja) * | 2007-06-06 | 2008-12-18 | Sumitomo Electric Ind Ltd | 交通信号制御システム、交通信号制御装置、車載装置及び交通信号制御方法 |
| JP2010250646A (ja) * | 2009-04-17 | 2010-11-04 | Sumitomo Electric Ind Ltd | 公共車両優先信号制御システム及び公共車両優先信号制御方法 |
| JP2011141606A (ja) * | 2010-01-05 | 2011-07-21 | Sumitomo Electric Ind Ltd | 路上通信システム及び交通信号制御機 |
| JP2012141800A (ja) * | 2010-12-28 | 2012-07-26 | Mitsubishi Heavy Ind Ltd | 情報処理装置、料金収受システム、及び料金収受方法 |
| JP2015514261A (ja) * | 2012-03-30 | 2015-05-18 | エヌイーシー ヨーロッパ リミテッドNec Europe Ltd. | 車両交通流量を適応させる方法及びシステム |
| US9235989B2 (en) * | 2014-02-27 | 2016-01-12 | Siemens Industry, Inc. | Adjustment of a traffic signal control plan based on local environmental conditions |
| CN106448194A (zh) * | 2016-10-28 | 2017-02-22 | 清华大学 | 交叉路口交通信号和车辆协同控制方法及装置、车辆 |
| KR101945462B1 (ko) | 2018-08-02 | 2019-02-08 | 주식회사 다온시스 | 긴급차량 자동 주행신호 제공 시스템 |
| CN110570672A (zh) * | 2019-09-18 | 2019-12-13 | 浙江大学 | 一种基于图神经网络的区域交通信号灯控制方法 |
| JP2020161186A (ja) * | 2018-12-26 | 2020-10-01 | 株式会社ニコン | 信号機制御装置、および、信号機 |
| CN112927526A (zh) * | 2021-01-23 | 2021-06-08 | 于贺龙 | 一种紧急车辆优先通过的信号灯控制系统及方法 |
| WO2021169104A1 (zh) * | 2020-02-28 | 2021-09-02 | 平安国际智慧城市科技股份有限公司 | 信号数据处理方法、系统、计算机设备和存储介质 |
| CN113706897A (zh) * | 2021-09-30 | 2021-11-26 | 安徽工业大学 | 基于v2x的公交优先动态反馈控制方法 |
| CN113724509A (zh) * | 2021-07-12 | 2021-11-30 | 清华大学 | 一种时空协同的公交优先控制方法和装置 |
| JP2022017505A (ja) * | 2020-12-21 | 2022-01-25 | 阿波羅智聯(北京)科技有限公司 | 交通を制御する方法、装置、路側機器、クラウド制御プラットフォーム、記憶媒体及びコンピュータプログラム製品 |
| WO2022105797A1 (zh) * | 2020-11-17 | 2022-05-27 | 长沙智能驾驶研究院有限公司 | 交叉路口通行协调方法和装置 |
| JP2023034187A (ja) * | 2021-08-30 | 2023-03-13 | 日本信号株式会社 | 交通制御システム |
| US12211377B2 (en) | 2010-08-06 | 2025-01-28 | Nikon Corporation | Information control system and vehicle having mobile communication device |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11232590A (ja) * | 1998-02-13 | 1999-08-27 | Nagoya Denki Kogyo Kk | バス優先信号制御方法およびその装置 |
| JP2002042291A (ja) * | 2000-07-25 | 2002-02-08 | Omron Corp | 交通信号機制御装置および交通信号機制御方法 |
| JP2002056493A (ja) * | 2000-08-07 | 2002-02-22 | Hitachi Ltd | 車両特定装置 |
| JP2003296881A (ja) * | 2002-04-05 | 2003-10-17 | Nippon Telegr & Teleph Corp <Ntt> | 緊急車両の優先通行支援装置、システムおよびその方法 |
| JP2006209680A (ja) * | 2005-01-31 | 2006-08-10 | Sumitomo Electric Ind Ltd | 緊急車両優先制御システム、制御装置及び画像処理装置 |
-
2005
- 2005-05-25 JP JP2005152529A patent/JP2006331002A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11232590A (ja) * | 1998-02-13 | 1999-08-27 | Nagoya Denki Kogyo Kk | バス優先信号制御方法およびその装置 |
| JP2002042291A (ja) * | 2000-07-25 | 2002-02-08 | Omron Corp | 交通信号機制御装置および交通信号機制御方法 |
| JP2002056493A (ja) * | 2000-08-07 | 2002-02-22 | Hitachi Ltd | 車両特定装置 |
| JP2003296881A (ja) * | 2002-04-05 | 2003-10-17 | Nippon Telegr & Teleph Corp <Ntt> | 緊急車両の優先通行支援装置、システムおよびその方法 |
| JP2006209680A (ja) * | 2005-01-31 | 2006-08-10 | Sumitomo Electric Ind Ltd | 緊急車両優先制御システム、制御装置及び画像処理装置 |
Cited By (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008305084A (ja) * | 2007-06-06 | 2008-12-18 | Sumitomo Electric Ind Ltd | 交通信号制御システム、交通信号制御装置、車載装置及び交通信号制御方法 |
| JP2010250646A (ja) * | 2009-04-17 | 2010-11-04 | Sumitomo Electric Ind Ltd | 公共車両優先信号制御システム及び公共車両優先信号制御方法 |
| JP2011141606A (ja) * | 2010-01-05 | 2011-07-21 | Sumitomo Electric Ind Ltd | 路上通信システム及び交通信号制御機 |
| US12211377B2 (en) | 2010-08-06 | 2025-01-28 | Nikon Corporation | Information control system and vehicle having mobile communication device |
| JP2012141800A (ja) * | 2010-12-28 | 2012-07-26 | Mitsubishi Heavy Ind Ltd | 情報処理装置、料金収受システム、及び料金収受方法 |
| JP2015514261A (ja) * | 2012-03-30 | 2015-05-18 | エヌイーシー ヨーロッパ リミテッドNec Europe Ltd. | 車両交通流量を適応させる方法及びシステム |
| US9235989B2 (en) * | 2014-02-27 | 2016-01-12 | Siemens Industry, Inc. | Adjustment of a traffic signal control plan based on local environmental conditions |
| CN106448194A (zh) * | 2016-10-28 | 2017-02-22 | 清华大学 | 交叉路口交通信号和车辆协同控制方法及装置、车辆 |
| KR101945462B1 (ko) | 2018-08-02 | 2019-02-08 | 주식회사 다온시스 | 긴급차량 자동 주행신호 제공 시스템 |
| JP2020161186A (ja) * | 2018-12-26 | 2020-10-01 | 株式会社ニコン | 信号機制御装置、および、信号機 |
| JP7460466B2 (ja) | 2018-12-26 | 2024-04-02 | 株式会社ニコン | 信号機制御装置、および、信号機 |
| CN110570672A (zh) * | 2019-09-18 | 2019-12-13 | 浙江大学 | 一种基于图神经网络的区域交通信号灯控制方法 |
| CN110570672B (zh) * | 2019-09-18 | 2020-12-01 | 浙江大学 | 一种基于图神经网络的区域交通信号灯控制方法 |
| WO2021169104A1 (zh) * | 2020-02-28 | 2021-09-02 | 平安国际智慧城市科技股份有限公司 | 信号数据处理方法、系统、计算机设备和存储介质 |
| WO2022105797A1 (zh) * | 2020-11-17 | 2022-05-27 | 长沙智能驾驶研究院有限公司 | 交叉路口通行协调方法和装置 |
| JP2022017505A (ja) * | 2020-12-21 | 2022-01-25 | 阿波羅智聯(北京)科技有限公司 | 交通を制御する方法、装置、路側機器、クラウド制御プラットフォーム、記憶媒体及びコンピュータプログラム製品 |
| JP7416746B2 (ja) | 2020-12-21 | 2024-01-17 | 阿波▲羅▼智▲聯▼(北京)科技有限公司 | 交通を制御する方法、装置、路側機器、クラウド制御プラットフォーム、記憶媒体及びコンピュータプログラム製品 |
| CN112927526A (zh) * | 2021-01-23 | 2021-06-08 | 于贺龙 | 一种紧急车辆优先通过的信号灯控制系统及方法 |
| CN113724509A (zh) * | 2021-07-12 | 2021-11-30 | 清华大学 | 一种时空协同的公交优先控制方法和装置 |
| CN113724509B (zh) * | 2021-07-12 | 2023-03-14 | 清华大学 | 一种时空协同的公交优先控制方法和装置 |
| JP2023034187A (ja) * | 2021-08-30 | 2023-03-13 | 日本信号株式会社 | 交通制御システム |
| JP7768704B2 (ja) | 2021-08-30 | 2025-11-12 | 日本信号株式会社 | 交通制御システム |
| CN113706897B (zh) * | 2021-09-30 | 2022-07-22 | 安徽工业大学 | 基于v2x的公交优先动态反馈控制方法 |
| CN113706897A (zh) * | 2021-09-30 | 2021-11-26 | 安徽工业大学 | 基于v2x的公交优先动态反馈控制方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006331002A (ja) | 信号制御装置 | |
| JP6339326B2 (ja) | 車載器、サーバ、及び渋滞検出システム | |
| JP5256924B2 (ja) | 渋滞情報生成装置、コンピュータプログラム及び渋滞情報生成方法 | |
| JP5644168B2 (ja) | 運転支援装置 | |
| JP5277786B2 (ja) | 緊急車両優先制御装置、コンピュータプログラム及び緊急車両優先制御方法 | |
| US8441374B2 (en) | Traveling support device and traveling support method | |
| EP2407951B1 (en) | Driving supporting device | |
| US8924141B2 (en) | Information providing apparatus | |
| US11345365B2 (en) | Control device, getting-into/out facility, control method, and storage medium | |
| US20190278286A1 (en) | Vehicle control device, vehicle control method, and storage medium | |
| JP6103265B2 (ja) | 車両用歩行者画像取得装置 | |
| US11027651B2 (en) | Vehicle control device, vehicle control system, vehicle control method, and storage medium | |
| WO2016098361A1 (ja) | 路側制御装置、コンピュータプログラム及び情報処理方法 | |
| JP2016177638A (ja) | 路側制御装置、コンピュータプログラム及び情報処理方法 | |
| JP6860757B2 (ja) | 交差点通過制御システム | |
| JP2000259986A (ja) | 緊急車両管制システム | |
| JP2009129290A (ja) | 信号機検出装置、信号機検出方法及びプログラム | |
| JP2010238037A (ja) | 信号予測装置 | |
| JP2014063241A (ja) | 移動体情報通信装置 | |
| US11403941B2 (en) | System and method for controlling vehicles and traffic lights using big data | |
| WO2014167793A1 (ja) | 車外画像保存装置、及び撮像機能付き携帯端末 | |
| JP2006221237A (ja) | 旅行時間算出システム | |
| CN114954241B (zh) | 识别装置、移动体、识别方法以及存储介质 | |
| JP5071893B2 (ja) | 車両制御システム、車載装置及び車両 | |
| JP6942913B1 (ja) | 自動車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Effective date: 20080117 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100105 |
|
| A02 | Decision of refusal |
Effective date: 20100427 Free format text: JAPANESE INTERMEDIATE CODE: A02 |