JP2007116777A - ロボットシステムの入力電源投入遮断装置 - Google Patents
ロボットシステムの入力電源投入遮断装置 Download PDFInfo
- Publication number
- JP2007116777A JP2007116777A JP2005303188A JP2005303188A JP2007116777A JP 2007116777 A JP2007116777 A JP 2007116777A JP 2005303188 A JP2005303188 A JP 2005303188A JP 2005303188 A JP2005303188 A JP 2005303188A JP 2007116777 A JP2007116777 A JP 2007116777A
- Authority
- JP
- Japan
- Prior art keywords
- contact
- switching unit
- unit
- input power
- closing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Landscapes
- Manipulator (AREA)
- Direct Current Feeding And Distribution (AREA)
Abstract
【課題】非常の際の回路切断不良や、通常稼働時の熱ロスの発生を抑制するとともに、有接点開閉部の劣化を無くし有接点開閉部のメンテナンス期間を機械的寿命に近づけることにより、寿命を飛躍的に延長することができるロボットシステムの入力電源投入遮断装置を提供する。
【解決手段】入力電源1と有接点開閉部2の間に配置され有接点開閉部2の接点と直列に電気接続された無接点開閉部4と、ロボット制御装置3の電源投入時には有接点開閉部2より無接点開閉部4が遅く閉じ、ロボット制御装置3の電源遮断時には有接点開閉部2より無接点開閉部4が早く開くように制御する開閉制御部5と、を備える。
【選択図】 図1
【解決手段】入力電源1と有接点開閉部2の間に配置され有接点開閉部2の接点と直列に電気接続された無接点開閉部4と、ロボット制御装置3の電源投入時には有接点開閉部2より無接点開閉部4が遅く閉じ、ロボット制御装置3の電源遮断時には有接点開閉部2より無接点開閉部4が早く開くように制御する開閉制御部5と、を備える。
【選択図】 図1
Description
本発明は、ロボットシステムの入力電源投入遮断装置に関し、特に入力電源をメカニカルに回路開閉する有接点開閉部を有するロボットシステムの入力電源投入遮断装置に関する。
従来のロボットシステム装置は、安全面からの要求で主回路電源の入切に有接点の開閉部を設置している(例えば、特許文献1参照)。
これは、非常時に確実に回路切断が行われるようにする為である。
図4は、従来技術を示すロボットシステムの入力電源投入遮断装置の説明図である。
図4において、1は入力電源、2はコンタクタなどの有接点開閉部、3はロボット制御装置である。また、Tctonは有接点開閉信号である。
以下、図4を用いて、従来技術によるロボットシステムの入力電源投入遮断装置の動作を説明する。
電源投入時には、有接点開閉信号Tctonで有接点開閉部2のコイルを励磁して、有接点開閉部2の接点を導通状態にすることによりロボット制御装置3に電源を投入する。
電源遮断時には、有接点開閉部2のコイルの励磁を止め、有接点開閉部2の接点を遮断状態にすることによりロボット制御装置3の電源を遮断する。
このように、従来技術によるロボットシステムの入力電源投入遮断装置は、有接点開閉部2を開閉して入力電源を入切するのである。
特開平6−206183号公報(第1図)
これは、非常時に確実に回路切断が行われるようにする為である。
図4は、従来技術を示すロボットシステムの入力電源投入遮断装置の説明図である。
図4において、1は入力電源、2はコンタクタなどの有接点開閉部、3はロボット制御装置である。また、Tctonは有接点開閉信号である。
以下、図4を用いて、従来技術によるロボットシステムの入力電源投入遮断装置の動作を説明する。
電源投入時には、有接点開閉信号Tctonで有接点開閉部2のコイルを励磁して、有接点開閉部2の接点を導通状態にすることによりロボット制御装置3に電源を投入する。
電源遮断時には、有接点開閉部2のコイルの励磁を止め、有接点開閉部2の接点を遮断状態にすることによりロボット制御装置3の電源を遮断する。
このように、従来技術によるロボットシステムの入力電源投入遮断装置は、有接点開閉部2を開閉して入力電源を入切するのである。
しかしながら、従来技術によるロボットシステムの入力電源投入遮断装置は、有接点開閉部を通電状態で入切する為、入切の際に発生するスパークやアークにより接点の劣化(電気的寿命)が起こり、有接点開閉部の機械的寿命よりも短期間で定期的メンテナンスを行わなければならないという問題があった。また、この電気的寿命を無視して、無メンテナンスで使用した場合は有接点の溶着、あるいは接点の電気的抵抗の増加が発生し、非常の際の回路切断不良や、通常稼働時の熱ロスが発生するという問題もあった。
本発明はこのような問題点に鑑みてなされたものであり、非常の際の回路切断不良や、通常稼働時の熱ロスの発生を抑制するとともに、有接点開閉部の劣化を無くし有接点開閉部のメンテナンス期間を機械的寿命に近づけることにより、寿命を飛躍的に延長することができるロボットシステムの入力電源投入遮断装置を提供することを目的とする。
上記問題を解決するため、請求項1に記載の発明は、入力電源とロボット制御装置の間に配置されメカニカルに回路開閉を行う有接点開閉部を備えたロボットシステムの入力電源投入遮断装置において、前記入力電源と前記有接点開閉部の間に配置され前記有接点開閉部の接点と直列に電気接続された無接点開閉部と、前記ロボット制御装置の電源投入時には前記有接点開閉部より前記無接点開閉部が遅く閉じ、前記ロボット制御装置の電源遮断時には前記有接点開閉部より前記無接点開閉部が早く開くように制御する開閉制御部と、を備えたことを特徴としている。
また、請求項2に記載の発明は、入力電源とロボット制御装置の間に配置されメカニカルに回路開閉を行う有接点開閉部を備えたロボットシステムの入力電源投入遮断装置において、前記ロボット制御装置と前記有接点開閉部の間に配置され、前記有接点開閉部の接点と直列に電気接続された無接点開閉部と、前記ロボット制御装置の電源投入時には前記有接点開閉部より前記無接点開閉部が遅く閉じ、前記ロボット制御装置の電源遮断時には前記有接点開閉部より前記無接点開閉部が早く開くように制御する開閉制御部と、を備えたことを特徴としている。
また、請求項3に記載の発明は、請求項1または2に記載のロボットシステムの入力電源投入遮断装置において、前記無接点開閉部は、半導体スイッチであることを特徴としている。
請求項1または2に記載の発明によれば、有接点開閉部が無通電で開閉する構成としたので、非常の際の回路切断不良や、通常稼働時の熱ロスの発生を抑制できる。また、有接点開閉部の劣化を無くし、有接点開閉部の寿命を飛躍的に延長することができるため、メンテナンス期間を長期化することができる。
また、請求項3に記載の発明によれば、半導体スイッチを用いることにより、有接点開閉部の劣化を無くし、有接点開閉部の寿命を飛躍的に延長することができるため、メンテナンス期間を長期化することができる。
以下、本発明の具体的実施例について、図に基づいて説明する。
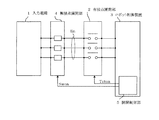
図1は、第1実施例を示すロボットシステムの入力電源投入遮断装置の構成図である。
図1において、1は入力電源、2はコンタクタなどの有接点開閉部、3はロボット制御装置、4はトランジスタ、サイリスタ等の半導体スイッチから成る無接点開閉部、5は開閉制御部である。また、Iinは有接点開閉部2に流れる流入電流、Swonは無接点開閉信号、Tctonは有接点開閉信号である。なお、図1では3相電源で表記しているが、相数は規定しない。
本発明の特徴は以下のとおりである。
すなわち、入力電源1と有接点開閉部2の間に配置され有接点開閉部2の接点と直列に電気接続された無接点開閉部4と、ロボット制御装置3の電源投入時には有接点開閉部2より無接点開閉部4が遅く閉じ、ロボット制御装置3の電源遮断時には有接点開閉部2より無接点開閉部4が早く開くように制御する開閉制御部5と、を備えるようにしている点である。
図1において、1は入力電源、2はコンタクタなどの有接点開閉部、3はロボット制御装置、4はトランジスタ、サイリスタ等の半導体スイッチから成る無接点開閉部、5は開閉制御部である。また、Iinは有接点開閉部2に流れる流入電流、Swonは無接点開閉信号、Tctonは有接点開閉信号である。なお、図1では3相電源で表記しているが、相数は規定しない。
本発明の特徴は以下のとおりである。
すなわち、入力電源1と有接点開閉部2の間に配置され有接点開閉部2の接点と直列に電気接続された無接点開閉部4と、ロボット制御装置3の電源投入時には有接点開閉部2より無接点開閉部4が遅く閉じ、ロボット制御装置3の電源遮断時には有接点開閉部2より無接点開閉部4が早く開くように制御する開閉制御部5と、を備えるようにしている点である。
図2は、本発明のロボットシステムの入力電源投入遮断装置の動作を示すシーケンス図である。図2において、横軸は時間を示し、縦軸は入力電源電圧Vin、無接点開閉信号Swon、有接点開閉信号Tcton、有接点開閉部2の接点の実際の開閉状態、有接点開閉部2に流れる流入電流Iinを示している。また、図2のtdは有接点開閉部2の機械的遅れ時間である。
以下、図1および図2を用いて本実施例における開閉制御部5の動作を説明する。
電源投入すなわち有接点開閉部2の接点を閉じる場合には、予め無接点開閉素子4を無接点開閉信号Swonにより開状態としておき、入力電源1から有接点開閉部2までの回路を遮断した状態にて、有接点開閉部2を有接点開閉信号Tctonにより閉状態とし、その後、有接点開閉部2の機械的遅れ時間td以上経った後、無接点開閉素子4を無接点開閉信号Swonにより閉状態にする。
一方、電源遮断すなわち接点を開く場合は、先に無接点開閉素子4を無接点開閉信号Swonにより開状態とし、その後、有接点開閉部2を有接点開閉信号Tctonにより開状態にする。
以上の動作により、有接点開閉部2の実際の開閉点である図2のA、Bの時点では、有接点開閉部2に流入する電流Iinを0とする事が出来る。
以下、図1および図2を用いて本実施例における開閉制御部5の動作を説明する。
電源投入すなわち有接点開閉部2の接点を閉じる場合には、予め無接点開閉素子4を無接点開閉信号Swonにより開状態としておき、入力電源1から有接点開閉部2までの回路を遮断した状態にて、有接点開閉部2を有接点開閉信号Tctonにより閉状態とし、その後、有接点開閉部2の機械的遅れ時間td以上経った後、無接点開閉素子4を無接点開閉信号Swonにより閉状態にする。
一方、電源遮断すなわち接点を開く場合は、先に無接点開閉素子4を無接点開閉信号Swonにより開状態とし、その後、有接点開閉部2を有接点開閉信号Tctonにより開状態にする。
以上の動作により、有接点開閉部2の実際の開閉点である図2のA、Bの時点では、有接点開閉部2に流入する電流Iinを0とする事が出来る。
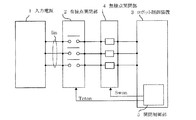
図3は、第2実施例を示すロボットシステムの入力電源投入遮断装置の構成図である。
図3において、図1と同じ説明符号のものは、図1と同じ構成要素および信号を示しているものとし、その説明は省略する。
本実施例が、第1実施例と相違する点は以下のとおりである。
すなわち、本実施例は、第1実施例である図1を構成する無接点開閉素子4を、入力電源1と有接点開閉部2の間の設置に代えて、有接点開閉部2とロボット制御装置3の間に設置する構成としたものであり、その他の構成は第1実施例と同じであり、動作シーケンスも第1実施例における図2と同じである。
以下、図2、3を用いて本実施例における開閉制御部5の動作を説明する。
電源投入すなわち接点を閉じる場合には、予め無接点開閉部4を無接点開閉信号Swonにより開状態としておき、有接点開閉部2を有接点開閉信号Tctonにより閉状態とし、その後、有接点開閉部2の機械的遅れ時間td以上経った後、無接点開閉部4を無接点開閉信号Swonにより閉状態にする。
電源遮断すなわち接点を開く場合は、先に無接点開閉部4を無接点開閉信号Swonにより開状態とし、その後、有接点開閉部2を有接点開閉信号Tctonにより開状態にする。
図3において、図1と同じ説明符号のものは、図1と同じ構成要素および信号を示しているものとし、その説明は省略する。
本実施例が、第1実施例と相違する点は以下のとおりである。
すなわち、本実施例は、第1実施例である図1を構成する無接点開閉素子4を、入力電源1と有接点開閉部2の間の設置に代えて、有接点開閉部2とロボット制御装置3の間に設置する構成としたものであり、その他の構成は第1実施例と同じであり、動作シーケンスも第1実施例における図2と同じである。
以下、図2、3を用いて本実施例における開閉制御部5の動作を説明する。
電源投入すなわち接点を閉じる場合には、予め無接点開閉部4を無接点開閉信号Swonにより開状態としておき、有接点開閉部2を有接点開閉信号Tctonにより閉状態とし、その後、有接点開閉部2の機械的遅れ時間td以上経った後、無接点開閉部4を無接点開閉信号Swonにより閉状態にする。
電源遮断すなわち接点を開く場合は、先に無接点開閉部4を無接点開閉信号Swonにより開状態とし、その後、有接点開閉部2を有接点開閉信号Tctonにより開状態にする。
以上述べたように、本発明の第1、2実施例に係るロボットシステムの入力電源投入遮断装置は、入力電源1と有接点開閉部2の間、またはロボット制御装置3と有接点開閉部2の間に設置され、有接点開閉部2の接点と直列に電気接続された半導体スイッチなどの無接点開閉部4を備え、無接点開閉部4は、投入時には有接点開閉部2より遅く閉じられ、遮断時には有接点開閉部2より早く開かれる有接点開閉部2の開閉前に通電を停止する開閉制御部5を備える構成としているので、非常の際の回路切断不良や、通常稼働時の熱ロスの発生を抑制できるとともに、有接点開閉部2の接点は無通電開閉であるため、有接点開閉部2の劣化を無くし有接点開閉部2の寿命を飛躍的に延長することができるため、メンテナンス期間を長期化、もしくはメンテナンスフリーにすることができる。
通電開閉を行う有接点開閉部を有し、メンテナンス期間の長期化もしくはメンテナンスフリーが求められるシステムの入力電源投入遮断装置への適用が可能である。
1 入力電源
2 コンタクタなどの有接点開閉部
3 ロボット制御装置
4 トランジスタ、サイリスタ等の半導体スイッチから成る無接点開閉部
5 開閉制御部
2 コンタクタなどの有接点開閉部
3 ロボット制御装置
4 トランジスタ、サイリスタ等の半導体スイッチから成る無接点開閉部
5 開閉制御部
Claims (3)
- 入力電源(1)とロボット制御装置(3)の間に配置されメカニカルに回路開閉を行う有接点開閉部(2)を備えたロボットシステムの入力電源投入遮断装置において、
前記入力電源(1)と前記有接点開閉部(2)の間に配置され前記有接点開閉部(2)の接点と直列に電気接続された無接点開閉部(4)と、
前記ロボット制御装置(3)の電源投入時には前記有接点開閉部(2)より前記無接点開閉部(4)が遅く閉じ、前記ロボット制御装置(3)の電源遮断時には前記有接点開閉部(2)より前記無接点開閉部(4)が早く開くように制御する開閉制御部(5)と、を備えたことを特徴とするロボットシステムの入力電源投入遮断装置。 - 入力電源(1)とロボット制御装置(3)の間に配置されメカニカルに回路開閉を行う有接点開閉部(2)を備えたロボットシステムの入力電源投入遮断装置において、
前記ロボット制御装置(3)と前記有接点開閉部(2)の間に配置され、前記有接点開閉部(2)の接点と直列に電気接続された無接点開閉部(4)と、
前記ロボット制御装置(3)の電源投入時には前記有接点開閉部(2)より前記無接点開閉部(4)が遅く閉じ、前記ロボット制御装置(3)の電源遮断時には前記有接点開閉部(2)より前記無接点開閉部(4)が早く開くように制御する開閉制御部(5)と、を備えたことを特徴とするロボットシステムの入力電源投入遮断装置。 - 前記無接点開閉部(4)は、
半導体スイッチであることを特徴とする請求項1または2に記載のロボットシステムの入力電源投入遮断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005303188A JP2007116777A (ja) | 2005-10-18 | 2005-10-18 | ロボットシステムの入力電源投入遮断装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005303188A JP2007116777A (ja) | 2005-10-18 | 2005-10-18 | ロボットシステムの入力電源投入遮断装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007116777A true JP2007116777A (ja) | 2007-05-10 |
Family
ID=38098455
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005303188A Pending JP2007116777A (ja) | 2005-10-18 | 2005-10-18 | ロボットシステムの入力電源投入遮断装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007116777A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009012946A (ja) * | 2007-07-05 | 2009-01-22 | Mitsubishi Electric Corp | ブレーキコイルの駆動回路 |
| KR20170133739A (ko) * | 2016-05-26 | 2017-12-06 | 현대일렉트릭앤에너지시스템(주) | 배전반 |
-
2005
- 2005-10-18 JP JP2005303188A patent/JP2007116777A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009012946A (ja) * | 2007-07-05 | 2009-01-22 | Mitsubishi Electric Corp | ブレーキコイルの駆動回路 |
| KR20170133739A (ko) * | 2016-05-26 | 2017-12-06 | 현대일렉트릭앤에너지시스템(주) | 배전반 |
| KR102150429B1 (ko) * | 2016-05-26 | 2020-09-01 | 현대일렉트릭앤에너지시스템(주) | 배전반 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005158749A (ja) | 複数接触器構成の接触器をそれぞれ独立に制御する方法及び装置 | |
| JPWO2008132975A1 (ja) | 電力変換装置 | |
| US6611416B1 (en) | Safety relay circuit for large power contactors | |
| JP6202871B2 (ja) | 直流回路遮断装置 | |
| JP6120723B2 (ja) | 制御回路、制御回路の短絡故障検知方法、転轍制御回路の短絡故障検知方法および鉄道信号用連動制御システム | |
| JP2007116777A (ja) | ロボットシステムの入力電源投入遮断装置 | |
| US20190006138A1 (en) | Relay device | |
| JP2000215772A (ja) | インタ―ロック回路 | |
| JP4955363B2 (ja) | インバータ装置 | |
| JP4885888B2 (ja) | 励磁突入電流抑制装置付開閉器 | |
| JP2024075822A (ja) | 電流開閉装置 | |
| JP2006034000A (ja) | 空気調和機の突入電流防止回路 | |
| US12614686B2 (en) | Arc-free hybrid relay | |
| JP3998632B2 (ja) | 電気車制御装置 | |
| CN110942940B (zh) | 用于控制电开关的方法 | |
| JPH08212879A (ja) | 電源の供給・遮断装置及びこの電源の供給・遮断方法 | |
| JP5165348B2 (ja) | スターデルタ始動装置 | |
| KR100888775B1 (ko) | 전등 및 전열기기의 전력 제어장치 및 그 방법 | |
| US20240355562A1 (en) | Dc circuit breaker | |
| KR20040099202A (ko) | 전력용 스위칭 반도체 소자를 적용한 전자 개폐기와 무순단 전자 자동 절체기 | |
| WO2026009729A1 (ja) | 電力遮断装置 | |
| CN113659915A (zh) | 电机、电机的预保护控制方法及预保护系统 | |
| JP2017191682A (ja) | 直流3路スイッチ装置 | |
| JP4778814B2 (ja) | エレベータのブレーキ制御装置 | |
| KR200267052Y1 (ko) | 포토 센서를 이용한 릴레이 보호회로 |