JP2007122155A - 分岐路進入推定装置 - Google Patents
分岐路進入推定装置 Download PDFInfo
- Publication number
- JP2007122155A JP2007122155A JP2005309905A JP2005309905A JP2007122155A JP 2007122155 A JP2007122155 A JP 2007122155A JP 2005309905 A JP2005309905 A JP 2005309905A JP 2005309905 A JP2005309905 A JP 2005309905A JP 2007122155 A JP2007122155 A JP 2007122155A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- gaze
- branch
- branch road
- branch path
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images






Landscapes
- Traffic Control Systems (AREA)
Abstract
【課題】車両が分岐路に進入する前に、車両が分岐路に進入することをほぼ確実に推定可能にする。
【解決手段】本発明の分岐路進入推定装置は、前方に分岐路が存在する道路を車両が走行しているときに、前記分岐路の手前において運転者の分岐路方向への注視を検出する注視検出手段6を備えると共に、この注視検出手段6により検出された検出結果である注視回数や注視の累積時間等に基づいて、分岐路に進入すると推定する推定手段2を備えたところに特徴を有するものである。
【選択図】図1
【解決手段】本発明の分岐路進入推定装置は、前方に分岐路が存在する道路を車両が走行しているときに、前記分岐路の手前において運転者の分岐路方向への注視を検出する注視検出手段6を備えると共に、この注視検出手段6により検出された検出結果である注視回数や注視の累積時間等に基づいて、分岐路に進入すると推定する推定手段2を備えたところに特徴を有するものである。
【選択図】図1
Description
本発明は、車両の速度を自動的に制御するクルーズコントロールシステムに組み込むことに好適する分岐路進入推定装置に関する。
車両の速度を自動的に制御するクルーズコントロールシステムにおいては、カーナビゲーション装置から出力される情報を活用して走行車線や分岐点反射板を検出することにより、分岐路への車両の進入を推定して車速を自動的に制御(減速制御)する構成が考えられている(例えば特許文献1参照)。
特願2004−341941号公報
上記特許文献1に記載された構成の場合、カーナビゲーション装置から出力される車両の現在地の情報に、誤差が含まれていることから、車両が分岐路に進入した後でないと、車両が分岐路に進入したことを推定することができなかった。このため、分岐路が分岐後すぐから急カーブしている場合には、車両の減速が間に合わないという問題点があった。
そこで、本発明の目的は、車両が分岐路に進入する前に、車両が分岐路に進入することを推定することができる分岐路進入推定装置を提供するにある。
本発明の分岐路進入推定装置は、前方に分岐路が存在する道路を車両が走行しているときに、前記分岐路の手前において運転者の分岐路方向への注視を検出する注視検出手段を備えると共に、この注視検出手段により検出された検出結果である注視回数や注視の累積時間等に基づいて、分岐路に進入すると推定する推定手段を備えたところに特徴を有するものである。
上記構成によれば、注視検出手段により検出された検出結果である注視回数や中止の累積時間等に基づいて、分岐路に進入することを推定するように構成したので、車両が分岐路に進入する前に、車両が分岐路に進入することを推定することができる。
また、上記構成の場合、前記注視検出手段は、前方の規定距離内における予め算出された分岐路の注視範囲内に、運転者の視線や顔の向き等が入ったときに、運転者の注視を検出するように構成されていることが好ましい。
更に、前記注視検出手段は、運転者の分岐路方向への注視と、運転者の分岐路方向と反対方向への注視とを検出するように構成され、前記推定手段は、両方向への注視の検出結果に基づいて、分岐路に進入すると推定するように構成されていることがより一層好ましい。
更にまた、前記分岐路の注視範囲は、車両の進行方向から分岐路規定遠方点までの最大視野角から、車両の進行方向から本線規定遠方点までの最大視野角を差し引いた視野角であることが良い構成である。
以下、本発明をクルーズコントロールシステムに適用した一実施例について、図面を参照しながら説明する。まず、図1は、本実施例のクルーズコントロールシステムの電気的構成を示すブロックである。クルーズコントロールシステム1は、車間制御ECU(車間制御用電子制御装置)2と、エンジンECU(エンジン制御用電子制御装置)3と、ブレーキECU(ブレーキ制御用電子制御装置)4と、ナビゲーションECU(ナビゲーション制御装置)5と、注視点検出ECU(注視点検出用電子制御装置)6とを中心に構成されている。各ECU2〜6は、車内LAN7を介して通信可能なように構成されている。
車間制御ECU2は、マイクロコンピュータを中心として構成されている電子回路であり、車速信号、操舵角信号、ヨーレート信号、目標車間時間信号、ワイパスイッチ情報、アイドル制御やブレーキ制御の制御状態信号、図示しないウィンカーの状態を示す情報等をエンジンECU3から受信する。また、車間制御ECU2は、後述するレーザセンサ8からの測距データを受信し、さらに、後述するナビゲーションECU5からの走行する道路情報も受信する。そして、車間制御ECU2は、これら受信したデータに基づいて、車間制御演算、各ノードにおける車両を安定して走行させるための速度の算出、車速制御などをしている。
また、車間制御ECU2は、クルーズコントロールスイッチ9や目標車間設定スイッチ10、アクセルスイッチからの検出信号を受信する。このうち、クルーズコントロールスイッチ9は、制御開始スイッチ、制御終了スイッチ、アクセルスイッチ及びコーストスイッチなどを備えている。制御開始スイッチは、クルーズ制御を開始可能状態にするためのスイッチであり、目標車間設定スイッチ10がONの状態で制御開始スイッチをONすることにより、クルーズ制御が開始できる状態となる。このクルーズ制御では、車間制御及び定速走行制御が所定条件下で選択的に実行されることになる。また、アクセルスイッチは、これを押すことにより、記憶されている設定車速を徐々に増加させるためのスイッチであり、コーストスイッチは、これを押すことにより、記憶されている設定車速を徐々に減少させるためのスイッチである。また、目標車間設定スイッチ10を介し、自車と前方車両との車間距離を設定できるようになっている。車間距離は、運転者の好みに合わせて段階的に設定可能となっている。なお、車間制御ECU2は、走行車線を推定する機能や、分岐路への進入を推定する推定手段としての機能を有している。
レーザセンサ8は、レーザビームによるスキャニング測距器とマイクロコンピュータとを中心として構成されている電子回路であり、スキャニング測距器にて、前方車両や停止物(例えば路側物)との距離、角度、相対速度等を検出する。そして、車間制御ECU2から受信する車速信号、カーブ曲率半径(推定R)等に基づいて、前方車両の自車線確率を計算するとともに、前方車両との相対速度等の前方車両情報を、車間制御ECU2に送信する。また、停止物の位置、自車の推定進行路(自車の進路)からの距離等の停止物情報を、車間制御ECU2に送信する。更に、レーザセンサ3自身のダイアグノーシス信号(ダイアグ情報)も車間制御ECU2に送信する。例えばレーザセンサ3でのスキャン周期を100msecとし、100msec毎に測距データを出力する。
エンジンECU3は、マイクロコンピュータを中心として構成されている電子回路であり、スロットル開度センサ、車両速度を検出する速度検出手段としての車速センサ11、ブレーキの踏み込み有無を検出するブレーキスイッチ、及びその他のセンサやスイッチ類からの検出信号、あるいは車内LAN7などの公知の通信ラインを介して受信するワイパスイッチ情報やテールスイッチ情報を受信する。さらに、ブレーキECU4からの操舵角信号やヨーレート信号、あるいは車間制御ECU2からの目標加速度信号、フューエルカット要求信号、ODカット要求信号、3速シフトダウン要求信号、警報要求信号、ダイアグノーシス信号、表示データ信号等を受信している。
また、エンジンECU3は、必要な表示情報を、車内LAN7を介して、メータクラスタに備えられているLCD等の表示器に送信して表示させたり、あるいは車速信号、操舵角信号、ヨーレート信号、目標車間時間信号、ワイパスイッチ情報信号、アイドル制御やブレーキ制御の制御状態信号を、車間制御ECU2に送信したりしている。そして、エンジンECU3は、ブレーキECU4とともに、車両を設定された車速となるように加減速制御する機能を有している。
ブレーキECU4は、マイクロコンピュータを中心として構成されている電子回路であり、車両の操舵角を検出するステアリングセンサ12、ヨーレートを検出するヨーレートセンサ13から操舵角やヨーレートを求めて、これらのデータを、エンジンECU3を介して車間制御ECU2に送信したり、ブレーキ力を制御するためにブレーキ油圧回路に備えられた増圧制御弁・減圧制御弁の開閉をデューティ制御するブレーキアクチュエータを制御したりしている。また、ブレーキECU4は、エンジンECU3を介する車間制御ECU2からの警報要求信号に応じて警報ブザーを鳴動する。
ナビゲーションECU5は、マイクロコンピュータおよび地図データベースを記録したHDD等を中心に構成されており、GPSアンテナ14が接続されており、自車の現在位置(現在地)を演算し、自車の走行している走行路に関する情報を一定間隔で(本実施例では約1秒毎に)車間制御ECU2に出力する機能を有している。
また、地図データベースには、リンク情報、ノード情報、セグメント情報、及びリンク間接続情報などの走行路に関する情報(道路情報)が記憶されている。リンク情報としては、リンクを特定するための固有の番号であるリンクIDや、例えば高速道路、有料道路、一般道あるいは取付道路(分岐路)などを識別するためのリンククラスや、道路の車線数、車線幅(車線幅員)、リンクの始端座標および終端座標や、リンクの長さを示すリンク長などのリンク自体に関する情報がある。また、ノード情報としては、リンクを結ぶノード固有の番号であるノードIDや、ノード緯度、ノード経度、交差点での右左折禁止、信号機有無、分岐点か否かなどの情報がある。さらに、セグメント情報としては、セグメントID、始点(ノード)緯度(度)、始点(ノード)経度(度)、セグメントの方角(dir)、セグメントの長さ(ノード間距離)などの情報がある。なお、始点緯度および始点経度の値は、小数点以下を含み、「分」、「秒」を「度」に換算したものである。また、リンク間接続情報には、例えば一方通行などの理由で通行が可か不可かを示すデータなどが設定されている。なお、同じリンクであっても、例えば一方通行の場合には、あるリンクからは通行可であるが別のリンクからは通行不可ということとなる。したがって、あくまでリンク間の接続態様によって通行可や通行不可が決定される。
そして、ナビゲーションECU5は、車線数を検出する手段としての機能や、車両の現在位置を検出(特定)する機能を有している。尚、ナビゲーションECU5は、周知構成のカーナビゲーション装置とほぼ同じ構成を有しており、GPSアンテナ14からの信号と、前記車速センサ11からの検出信号と、前記ステアリングセンサ12からの検出信号と、前記ヨーレートセンサ13からの検出信号とを受けて、種々のカーナビゲーション制御(地図表示、車両の現在位置の検出及びマップマッチング、目的地までの最適経路探索、設定された経路の経路案内等の各制御動作)を実行する機能を有している。
注視点検出ECU6は、運転者の顔の向きや眼球の動作等を撮影するカメラ15からの画像信号と、ナビゲーションECU5からのナビゲーション情報(車両の現在位置情報や走行する道路の道路情報等)とを受けて、分岐路の手前において運転者の分岐路方向への注視を検出する機能を有している。そして、注視点検出ECU6は、上記検出された検出結果である注視回数や中止の累積時間等の情報を前記車間制御ECU2に送信する。この構成の場合、注視点検出ECU6は、注視検出手段としての機能を有している。また、この注視点検出ECU6と前記車間制御ECU2とから分岐路進入推定装置が構成されている。尚、カメラ15は、車両のインストルメントパネルの適宜部位(運転者の顔や目を撮影し易い部位)に配設されている。
次に、上記構成の作用、特には、クルーズコントロールシステム1の制御の中の、分岐路への進入を推定する制御並びに分岐路向けの車速制御を実行する制御の内容について、図2、図3、図4、図5、図6、図7を参照して説明する。図4のフローチャートは、上記各制御のメインルーチンの制御内容を示す。図5のフローチャートは、分岐路への進入を推定する制御(サブルーチン)の制御内容を示す。尚、図4、図5の制御は、車間制御ECU2や注視点検出ECU6を中心として(他のECUも含めて)適宜分担して実行されるように構成されている。
まず、図4のステップS10において、クルーズコントロールスイッチ9がオンされているか否かを判断する。ここで、オンされていない場合には、「NO」へ進み、何もしない。一方、オンされている場合には、「YES」へ進み、ステップS20へ進み、車両の現在位置情報と車両が走行中の道路周辺の道路情報等に基づいて、車両の前方に分岐路があるか否かを判断する。ここで、分岐路がない場合には、「NO」へ進み、ステップS10へ戻り、何もしない。
これに対して、分岐路がある場合には、「YES」へ進み、ステップS30へ進み、分岐路への進入を推定する処理(サブルーチン)を実行する。この処理については、図5のフローチャートを参照して説明する。
まず、図5のステップS100において、従来技術(特許文献1に記載された構成)による分岐路への進入を推定する推定処理を実行する。この推定処理において、分岐路への進入が推定された場合、ステップS110にて、「YES」へ進み、ステップS120へ進み、分岐路への進入と推定する、即ち、例えば分岐路への進入推定用のフラグをオンする。
これに対して、上記ステップS100の推定処理において、分岐路への進入が推定されなかった場合、ステップS110にて、「NO」へ進み、ステップS130へ進む。このステップS130では、車両が分岐側端車線、即ち、分岐路方向の端車線(分岐路方向が例えば左方であれば左端車線、分岐路方向が例えば右方であれば右端車線)を走行中において、例えば分岐路手前規定距離(例えば100m)から分岐点に到るまでの間に、分岐方向のウインカがオン操作されたか否かを判断する。尚、この判断において、車両が分岐側端車線を走行しているか否かの検出は、特許文献1に記載された車線検出手法(手段)を用いて実行すれば良い。
上記ステップS130において、分岐方向のウインカがオン操作された場合には、「YES」へ進み、ステップS120へ進み、分岐路への進入と推定する。一方、分岐方向のウインカがオン操作されない場合には、「NO」へ進み、ステップS140へ進み、注視度合いに基づく分岐路進入判定エリア内に車両が位置しているか否かを判断する。ここで、分岐路進入判定エリアは、分岐路手前規定距離(例えば200m)から分岐点を通過するまでの間のエリアのことである。
上記ステップS140において、車両が上記エリア内でなければ、「NO」へ進み、ステップS180へ進み、分岐路への進入なしと推定する、即ち、例えば分岐路への進入推定用のフラグをオフする。
一方、ステップS140において、車両が上記エリア内であれば、「YES」へ進み、ステップS150へ進み、分岐路方向注視範囲への注視検出処理を実行する。この場合、具体的には、分岐路手前規定距離(例えば200m)から分岐点を通過するまでの間において、分岐路方向を運転者が注視した回数と時間、並びに、分岐路反対方向(分岐路方向とは反対方向)を運転者が注視した回数と時間を計測する。
ここで、分岐路方向注視回数とは、規定時間(例えば0.2秒)以上連続して注視した回数のことである。また、分岐路方向注視時間とは、規定時間(例えば0.2秒)以上連続して注視していた場合のその注視していた時間の合計時間(累積時間)のことである。
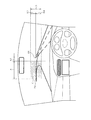
そして、分岐路方向注視とは、図3に示すように、水平方向分岐路方向注視範囲Aと、垂直方向進路注視範囲Bとで囲まれた領域C内を注視(視線または顔の向きを向けること)することである。
ここで、水平方向分岐路方向注視範囲Aとは、図2に示すように、自車から前方規定距離(例えば50m)D1の分岐路視野角(即ち、自車進行方向P1から分岐路中心P2までの角度)K1から、分岐路規定遠方点(例えば自車から500m)P3までの最大視野角K2の範囲のことである。換言すると、分岐路規定遠方点最大視野角K2から前方規定距離分岐路視野角K1を差し引いた視野角が、水平方向分岐路方向注視範囲Aである。
但し、自車から前方規定距離に分岐点がない場合には、分岐路視野角K1を規定最低角度(例えば5度)とする。また、分岐路視野角が規定最低角度以下である場合も、規定最低角度とする。更に、道路の本線が分岐路側にカーブしている場合には、本線規定遠方点までの最大視野角は、分岐路方向注視範囲としない。
また、垂直方向進路注視範囲Bとは、図3に示すように、自車の前後傾斜とカーナビゲーション情報の現在地(現在位置)と走行路前方の勾配とから本線遠点P4をずらし、その上下規定角度(例えば±10度)K3,K4内の範囲のことである。但し、ルームミラーやボンネットと重なる範囲は除外する。
一方、分岐路反対方向注視とは、以下説明する水平方向と垂直方向で囲まれる範囲内を注視することである。ここで、水平方向は、自車進行方向P1から規定最低角度(例えば10度)以上から規定角度(例えば90度)までの分岐路反対方向範囲のことである。そして、垂直方向は、上記した分岐路方向注視の垂直方向進路注視範囲Bと同じ範囲に設定している。
そして、この後は、図5のステップS160へ進み、注視回数差が例えば3回以上であるか否か、即ち、分岐路方向への注視回数の方が分岐路反対方向への注視回数よりも規定回数である例えば3回以上多いか否かを判断する。ここで、分岐路方向への注視回数の方が3回以上多ければ、分岐路へ進入すると推定することができるから、ステップS160にて「YES」へ進み、ステップS120へ進み、分岐路への進入を推定する。
一方、分岐路方向への注視回数の方が3回以上多くなければ、ステップS160にて「NO」へ進み、ステップS170へ進み、注視時間差が例えば1秒以上であるか否か、即ち、分岐路方向への注視時間の方が分岐路反対方向への注視時間よりも規定時間である例えば1秒以上長いか否かを判断する。ここで、分岐路方向への注視時間の方が1秒以上長ければ、分岐路へ進入すると推定することができるから、ステップS170にて「YES」へ進み、ステップS120へ進み、分岐路への進入と推定する。
一方、分岐路方向への注視時間の方が1秒以上長くなければ、ステップS170にて「NO」へ進み、ステップS180へ進み、分岐路への進入なしと推定する(分岐路への進入推定用のフラグをオフする)。尚、上記した各種の規定距離、規定回数、規定時間等の各数値は、一例であり、実験等に基づいて適宜設定するように構成すれば良い。また、上記各数値をユーザー(運転者等)により設定可能なように構成しても良いし、また、学習機能により変更可能なように構成しても良い。
そして、この後は、図4のステップS40へ進み、分岐路への進入を推定したか否か、即ち、分岐路進入推定用のフラグがオンであるか否かを判断する。ここで、分岐路進入を推定しなかった場合には、ステップS40にて「NO」へ進み、ステップS10へ戻り、何もしない。
これに対して、分岐路進入を推定した(分岐路進入推定用のフラグがオン)場合には、ステップS40にて「YES」へ進み、ステップS50へ進み、分岐路向けの車速制御を実施する旨のアナウンスを実行する。この場合、例えば、「ランプウエイ(または、サービスエリアなど)に出て行くための車速制御を開始します。」というメッセージをスピーカから出力(アナウンス)する。
そして、ステップS60へ進み、運転者から拒否応答があったか否かを判断(検出)する。この場合、拒否応答の例としては、アクセルのオン(または踏み増し)、「しなくても良い」という音声応答、キャンセルスイッチのオンなどがある。ここで、運転者から拒否応答があった場合には、ステップS60にて「YES」へ進み、ステップS10へ戻り、何もしない。
これに対して、ステップS60にて、運転者から拒否応答がなかった場合には、「NO」へ進み、ステップS70へ進み、分岐路向け車速制御を実行する。この場合、分岐路(ランプウエイ、サービスエリアなど)の道路形状(カーブ度合いなど)に従って車速を制御するように構成されている。本実施例では、例えば特願2004−175148号公報や前記特許文献1に記載されている車速制御装置によって制御するように構成することが好ましい。
このような構成の本実施例によれば、分岐路方向への注視回数や注視の累積時間等に基づいて、分岐路に進入することを推定するように構成したので、車両が分岐路に進入する前に、車両が分岐路に進入することをほぼ確実に推定することができる。これにより、分岐路が分岐後すぐから急カーブしている場合であっても、クルーズコントロールシステムの車速制御により十分に減速させる(減速が十分間に合う)ことができる。
ここで、特許文献1に記載された構成による分岐路進入推定制御では、推定を正確に実行できないケースについて図6を参照して説明する。図6に示すように、道路の3車線のうちの左端車線がそのまま分岐路になる場合が、上記特許文献1によっては推定を正確に実行できない場合である。この場合、左端車線を継続して走行していれば分岐路に進入することになるが、カーナビゲーション装置の現在地精度(GPS精度)の測定誤差の最大値分だけマージンをとって判断しなければならないので、分岐してから十数m〜数十m程度走行した時点でないと、分岐路への進入を推定することができない。
但し、分岐点の反射板を検出できて、自車がその反射板の左を走行して行けば、その時点で分岐路への進入を推定できるが、図6に示すように、分岐路が2車線で右側に車両がいて分岐点の反射板を遮っているとき(反射板が汚れていたり、破損していたりするときも含む)には、反射板を検出できないので、分岐路への進入を推定することができない。
上記した各場合において、本実施例によれば、運転者の分岐路方向への注視回数や注視の累積時間等に基づいて、分岐路に進入することを推定するように構成したので、分岐路への進入をほぼ確実に推定することができる。
また、図7に示すように、本線が分岐路と同じ方向にカーブしている場合には、運転者が本線を注視していても、分岐路への進入と誤推定してしまうおそれがある。これに対して、本実施例によれば、本線規定遠方点P2までの最大視野角K1の範囲を、分岐路方向注視範囲Aから除去する構成としたので、分岐路がある方向だけを注視している度合いに基づいて、分岐路への進入を推定することができるから、分岐路への進入の推定精度を高くすることができる。
一方、本線遠点を推定する方法として、前方監視カメラを車両に搭載している構成の場合には、前方監視カメラの画像を解析して本線の消失点を検出して、それを本線遠点とする方法もある。尚、画像の解析手法としては、例えばエッジ検出、細線化、線の連結処理、線セグメントのマッチング、ハフ変換などがあり、これら手法を適宜用いれば良い。
図面中、1はクルーズコントロールシステム、2は車間制御ECU(推定手段)、3はエンジンECU、4はブレーキECU、5はナビゲーションECU、6は注視点検出ECU(注視検出手段)、9はクルーズコントロールスイッチ、10は目標車間設定スイッチ、11は車速センサ、14はGPSアンテナ、15はカメラを示す。
Claims (4)
- 前方に分岐路が存在する道路を車両が走行しているときに、前記分岐路の手前において運転者の分岐路方向への注視を検出する注視検出手段と、
この注視検出手段により検出された検出結果である注視回数や注視の累積時間等に基づいて、分岐路に進入すると推定する推定手段とを備えたことを特徴とする分岐路進入推定装置。 - 前記注視検出手段は、前方の規定距離内における予め算出された分岐路の注視範囲内に、運転者の視線や顔の向き等が入ったときに、運転者の注視を検出するように構成されていることを特徴とする請求項1記載の分岐路進入推定装置。
- 前記注視検出手段は、運転者の分岐路方向への注視と、運転者の分岐路方向と反対方向への注視とを検出するように構成され、
前記推定手段は、両方向への注視の検出結果に基づいて、分岐路に進入すると推定するように構成されていることを特徴とする請求項1または2記載の分岐路進入推定装置。 - 前記分岐路の注視範囲は、車両の進行方向から分岐路規定遠方点までの最大視野角から、車両の進行方向から本線規定遠方点までの最大視野角を差し引いた視野角であることを特徴とする請求項2記載の分岐路進入推定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005309905A JP2007122155A (ja) | 2005-10-25 | 2005-10-25 | 分岐路進入推定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005309905A JP2007122155A (ja) | 2005-10-25 | 2005-10-25 | 分岐路進入推定装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007122155A true JP2007122155A (ja) | 2007-05-17 |
Family
ID=38145971
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005309905A Withdrawn JP2007122155A (ja) | 2005-10-25 | 2005-10-25 | 分岐路進入推定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007122155A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010064613A (ja) * | 2008-09-11 | 2010-03-25 | Hitachi Automotive Systems Ltd | ナビ協調走行制御装置 |
| EP2985168A1 (en) | 2014-08-11 | 2016-02-17 | Toyota Jidosha Kabushiki Kaisha | Driving assistance apparatus and driving assistance method |
| JP2016179813A (ja) * | 2016-03-22 | 2016-10-13 | 冨美雄 渡辺 | 車両運転者への注意喚起装置 |
| JP2024162531A (ja) * | 2023-05-10 | 2024-11-21 | トヨタ自動車株式会社 | 情報処理装置、情報処理用コンピュータプログラム及び情報処理方法 |
| WO2025182467A1 (ja) * | 2024-02-27 | 2025-09-04 | Astemo株式会社 | 運転支援システム及び運転支援方法 |
-
2005
- 2005-10-25 JP JP2005309905A patent/JP2007122155A/ja not_active Withdrawn
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010064613A (ja) * | 2008-09-11 | 2010-03-25 | Hitachi Automotive Systems Ltd | ナビ協調走行制御装置 |
| EP2985168A1 (en) | 2014-08-11 | 2016-02-17 | Toyota Jidosha Kabushiki Kaisha | Driving assistance apparatus and driving assistance method |
| CN105365819A (zh) * | 2014-08-11 | 2016-03-02 | 丰田自动车株式会社 | 驾驶辅助装置和驾驶辅助方法 |
| US9964950B2 (en) | 2014-08-11 | 2018-05-08 | Toyota Jidosha Kabushiki Kaisha | Driving assistance apparatus and driving assistance method |
| JP2016179813A (ja) * | 2016-03-22 | 2016-10-13 | 冨美雄 渡辺 | 車両運転者への注意喚起装置 |
| JP2024162531A (ja) * | 2023-05-10 | 2024-11-21 | トヨタ自動車株式会社 | 情報処理装置、情報処理用コンピュータプログラム及び情報処理方法 |
| JP7673769B2 (ja) | 2023-05-10 | 2025-05-09 | トヨタ自動車株式会社 | 情報処理装置、情報処理用コンピュータプログラム及び情報処理方法 |
| WO2025182467A1 (ja) * | 2024-02-27 | 2025-09-04 | Astemo株式会社 | 運転支援システム及び運転支援方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9527441B2 (en) | Vehicle control apparatus | |
| CN104221068B (zh) | 驾驶辅助装置 | |
| US11964668B2 (en) | Vehicle travel control method and travel control device | |
| US20100315217A1 (en) | Driving support device and program | |
| US8886364B2 (en) | Method and apparatus for determining traveling condition of vehicle | |
| CN106097774A (zh) | 车道变更支援装置 | |
| JP4055650B2 (ja) | 分岐路進入推定装置、車速制御装置およびプログラム | |
| CN113811933A (zh) | 车辆的行驶控制方法及行驶控制装置 | |
| JP2017162406A (ja) | 車両の自動運転制御システム | |
| CN118265645B (zh) | 车辆的行驶辅助方法及行驶辅助装置 | |
| JP2014157395A (ja) | 車両用運転支援システム及び運転支援方法 | |
| CN113811932A (zh) | 车辆的行驶控制方法及行驶控制装置 | |
| CN113811934A (zh) | 车辆的行驶控制方法及行驶控制装置 | |
| CN118266018B (zh) | 车辆的行驶辅助方法及行驶辅助装置 | |
| JP5614079B2 (ja) | 運転支援装置 | |
| JP2005182310A (ja) | 車両運転支援装置 | |
| CN110383361A (zh) | 用于在光信号设备处提醒驾驶员起动的方法和装置 | |
| JP7160706B2 (ja) | 道路認識装置 | |
| JP2011008699A (ja) | 運転操作評価装置 | |
| JP4985319B2 (ja) | 走行支援装置 | |
| JP4961311B2 (ja) | 運転支援装置及び運転支援方法 | |
| JP2023048308A (ja) | 車両支援サーバ、車両支援サーバの処理方法、及びプログラム | |
| JP2007122155A (ja) | 分岐路進入推定装置 | |
| JP2007223382A (ja) | 車両用方向指示器制御装置 | |
| JP4891745B2 (ja) | 退出検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Effective date: 20071225 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A761 | Written withdrawal of application |
Effective date: 20090727 Free format text: JAPANESE INTERMEDIATE CODE: A761 |