JP2007128778A - 燃料電池システム、その制御方法及びそれを搭載した車両 - Google Patents
燃料電池システム、その制御方法及びそれを搭載した車両 Download PDFInfo
- Publication number
- JP2007128778A JP2007128778A JP2005321279A JP2005321279A JP2007128778A JP 2007128778 A JP2007128778 A JP 2007128778A JP 2005321279 A JP2005321279 A JP 2005321279A JP 2005321279 A JP2005321279 A JP 2005321279A JP 2007128778 A JP2007128778 A JP 2007128778A
- Authority
- JP
- Japan
- Prior art keywords
- fuel cell
- driver
- condition
- travel
- stop
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/30—Hydrogen technology
- Y02E60/50—Fuel cells
Landscapes
- Fuel Cell (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【課題】燃料電池の停止再始動運転での燃費を向上することができる。
【解決手段】所定時間アクセルペダルなどが操作されないなど長時間走行しないという運転者の走行意思が推定されたときには(S140)、バッテリのSOCの上限値を通常時よりも大きい上限値Suslpに変更すると共にSOCの下限値を通常時よりも小さい下限値Sdslpに変更して制御するスリープモード運転を実行する(S240〜S320)。スリープモード運転ではエアブロー及び水素パージ操作を通常時よりも高い頻度で実行する(S260,S290)。SOCが下限値Sdslpを下回り再始動条件が成立すると、燃料電池の補機類の作動条件を静粛性を考慮した条件に変更し、SOCが上限値Suslpを超えるまでバッテリを充電するよう燃料電池を制御する(S300〜S340)。このように、長時間の停車に適した停止再始動運転を実行する。
【選択図】図3
【解決手段】所定時間アクセルペダルなどが操作されないなど長時間走行しないという運転者の走行意思が推定されたときには(S140)、バッテリのSOCの上限値を通常時よりも大きい上限値Suslpに変更すると共にSOCの下限値を通常時よりも小さい下限値Sdslpに変更して制御するスリープモード運転を実行する(S240〜S320)。スリープモード運転ではエアブロー及び水素パージ操作を通常時よりも高い頻度で実行する(S260,S290)。SOCが下限値Sdslpを下回り再始動条件が成立すると、燃料電池の補機類の作動条件を静粛性を考慮した条件に変更し、SOCが上限値Suslpを超えるまでバッテリを充電するよう燃料電池を制御する(S300〜S340)。このように、長時間の停車に適した停止再始動運転を実行する。
【選択図】図3
Description
本発明は、燃料電池システム、その制御方法及びそれを搭載した車両に関する。
従来、車両に搭載される燃料電池システムとしては、燃料電池の発電運転の停止再始動を行うものが提案されている(例えば、特許文献1参照)。この特許文献1に記載されたシステムは、アイドル停止条件が成立すると燃料電池のアイドルを停止しアイドル停止中にキャパシタの残容量が所定値以下に低下したときにはキャパシタの電力によりコンプレッサを起動し、通常の運転領域よりも発電効率のよい運転領域で燃料電池を再始動しキャパシタを充電する。このように、アイドル停止時には発電効率のよい運転領域でキャパシタを充電するため、燃費が向上する。
特開2004−56868号公報
しかしながら、この特許文献1に記載された燃料電池システムでは、燃料電池の停止再始動運転において運転者の走行する意思については考慮せずに燃料電池の発電運転を停止・再始動していた。つまり、長時間走行しない場合など、実際には燃料電池を再始動する必要がないときであっても、すぐに走行する場合と同じように燃料電池の再始動を行うため、このような場合には、燃料を無駄に消費することがあった。
本発明は、このような課題に鑑みなされたものであり、燃料電池の停止再始動運転での燃費を向上することができる燃料電池システム及びその制御方法を提供することを目的の一つとする。また、そのような燃料電池システムを搭載した車両を提供することを目的の一つとする。
本発明は、上述の目的の少なくとも一部を達成するために以下の手段を採った。
本発明の燃料電池システムは、
所定の停止条件が成立したときには燃料電池の発電運転を停止し所定の再始動条件が成立したときには該燃料電池の発電運転を再開する停止再始動運転を実行する燃料電池システムであって、
走行しないという運転者の走行意思を推定する推定手段と、
前記停止条件及び前記再始動条件のうち少なくとも一方の条件を前記推定手段によって推定された前記運転者の走行意思に基づいて設定する設定手段と、
前記設定手段によって設定された条件で前記燃料電池の発電運転を制御する制御手段と、
を備えたものである。
所定の停止条件が成立したときには燃料電池の発電運転を停止し所定の再始動条件が成立したときには該燃料電池の発電運転を再開する停止再始動運転を実行する燃料電池システムであって、
走行しないという運転者の走行意思を推定する推定手段と、
前記停止条件及び前記再始動条件のうち少なくとも一方の条件を前記推定手段によって推定された前記運転者の走行意思に基づいて設定する設定手段と、
前記設定手段によって設定された条件で前記燃料電池の発電運転を制御する制御手段と、
を備えたものである。
この燃料電池システムでは、所定の停止条件が成立したときには燃料電池の発電運転を停止し所定の再始動条件が成立したときには該燃料電池の発電運転を再開する停止再始動運転を実行する。このとき、例えば、運転者が走行をしない意志であるときには走行に備えるような燃料電池の再始動を行わないよう設定するなど、運転者の走行意思に基づいて停止再始動運転の停止条件や再始動条件を設定し、該設定した条件で燃料電池の発電運転を制御する。したがって、燃料電池の停止再始動運転での燃費を向上することができる。
本発明の燃料電池システムにおいて、前記設定手段は、前記推定手段によって長時間走行しないという運転者の走行意思が推定されたときには前記停止条件及び前記再始動条件のうち少なくとも一方の条件を前記燃料電池の発電運転の停止時間が長くなるよう設定してもよい。
本発明の燃料電池システムは、前記燃料電池が発電した電力を蓄電する蓄電手段を備え、前記設定手段は、前記蓄電手段の蓄電量に関する前記条件を設定してもよい。このとき、前記設定手段は、前記推定手段によって長時間走行しないという運転者の走行意思が推定されたときには、前記通常の停止再始動運転の前記蓄電手段の下限蓄電量と比べて小さな下限蓄電量を前記再始動条件として設定し、前記制御手段は、前記蓄電手段の蓄電量が前記下限蓄電量を下回ったときには前記蓄電手段に蓄電するよう前記燃料電池の発電運転を制御してもよい。こうすれば、通常の停止再始動運転よりも長い期間燃料電池の発電運転を停止するため、比較的容易に燃費を向上することができる。このとき、前記設定手段は、前記推定手段によって長時間走行しないという運転者の走行意思が推定されたときには、前記通常の停止再始動運転の前記蓄電手段の上限蓄電量と比べて大きな上限蓄電量を前記停止条件として設定し、前記制御手段は、前記蓄電手段の蓄電量が前記上限蓄電量を超えたときには、前記蓄電手段への蓄電を停止するよう前記燃料電池の発電運転を制御してもよい。こうすれば、下限蓄電量と上限蓄電量との範囲を大きくすることにより燃料電池の発電運転の停止及び再始動が頻繁に起きるのを防止可能であるため、システムを構成する部品の損傷などを低減することができる。
本発明の燃料電池システムは、前記燃料電池の発電及び該燃料電池が発電した電力の駆動力への変換の少なくとも一方に用いられる前記燃料電池の補機類、を備え、前記設定手段は、前記推定手段によって推定された前記運転者の走行意思に基づいて通常の前記停止再始動運転での前記補機類の作動条件とは異なる作動条件を設定し、前記制御手段は、前記設定手段によって設定された作動条件で前記燃料電池の補機類の運転を制御してもよい。このとき、前記設定手段は、前記推定手段によって長時間走行しないという運転者の走行意思が推定されたときには、前記補機類の作動条件を通常の停止再始動運転時よりも制限した作動条件に設定してもよい。こうすれば、長時間走行しないと推定されたとき、つまり長時間停車するときには、燃料電池の補機類が制限された作動条件で作動するため、停車中の静粛性を高めることができる。
本発明の燃料電池システムにおいて、前記設定手段は、前記推定手段によって長時間走行しないという前記運転者の走行意思が推定されたあと前記推定手段によって走行するという前記運転者の走行意思が推定されたときには、通常の前記停止条件及び前記再始動条件に変更してもよい。こうすれば、運転者の走行意志を推定して通常の条件に変更するため、走行に必要な電力をすぐに出力可能な状態とすることができる。
本発明の燃料電池システムは、前記燃料電池に供給された燃料ガスが前記燃料電池を介して循環する循環流路、を備え、前記設定手段は、前記推定手段によって推定された前記運転者の走行意思に基づいて前記循環流路を循環する燃料ガスを排出すると共に新たな燃料ガスを前記循環流路に導入するパージ操作の実行条件を通常の前記停止再始動運転での該パージ操作の実行条件とは異なる条件に設定し、前記制御手段は、前記設定手段によって設定された実行条件で前記パージ操作を実行してもよい。このとき、前記設定手段は、前記推定手段によって長時間走行しないという運転者の走行意思が推定されたときには、前記パージ操作の実行頻度を通常の停止再始動運転時よりも増加させた実行頻度に設定してもよい。こうすれば、燃料電池の発電運転を停止することによって低下した発電環境を十分改善可能であるため、燃料電池の発電運転を安定して行うことができる。
本発明の燃料電池システムにおいて、前記推定手段は、前記運転者が操作可能な操作部材の操作状態に基づいて運転者の走行意思を推定してもよい。こうすれば、操作部材の操作状態に基づいて比較的容易に運転者の走行意思を推定することができる。このとき、前記推定手段は、前記操作状態に基づいて運転者の走行意思を推定するに際して、アクセル開度状態、走行ブレーキ状態、パーキングブレーキ状態及びシフト位置状態のうち少なくとも1つの状態から運転者の走行意思を推定してもよい。
本発明の燃料電池システムにおいて、前記推定手段は、前記運転者から長時間走行しないという走行意思を取得することにより該運転者の走行意思を推定してもよい。こうすれば、より正確に長時間走行しない走行意志を推定することができる。
本発明の車両は、上述した種々の態様のいずれかの燃料電池システムを搭載したものである。本発明の燃料電池システムは、燃料電池の停止再始動運転での燃費を向上することができるから、これを搭載した車両も同様の効果を奏するものとなる。
所定の停止条件が成立したときには燃料電池の発電運転を停止し所定の再始動条件が成立したときには該燃料電池の発電運転を再開する停止再始動運転を実行する燃料電池システムの制御方法であって、
運転者の走行意思を推定し、前記停止条件及び前記再始動条件のうち少なくとも一方の条件を該推定した走行意志に基づいて設定し、該設定した条件で前記燃料電池の発電運転を制御することを含むものである。
運転者の走行意思を推定し、前記停止条件及び前記再始動条件のうち少なくとも一方の条件を該推定した走行意志に基づいて設定し、該設定した条件で前記燃料電池の発電運転を制御することを含むものである。
この燃料電池システムの制御方法では、
所定の停止条件が成立したときには燃料電池の発電運転を停止し所定の再始動条件が成立したときには該燃料電池の発電運転を再開する停止再始動運転を実行する。このとき、例えば、運転者が走行をしない意志であるときには走行に備えるような燃料電池の再始動を行わないよう設定するなど、運転者の走行意思に基づいて停止再始動運転の停止条件や再始動条件を設定し、該設定した条件で燃料電池の発電運転を制御する。したがって、燃料電池の停止再始動運転での燃費を向上することができる。なお、この燃料電池システムの制御方法において、上述した燃料電池システムの種々の態様を採用してもよいし、また、上述した燃料電池システムの機能を実現するようなステップを追加してもよい。
所定の停止条件が成立したときには燃料電池の発電運転を停止し所定の再始動条件が成立したときには該燃料電池の発電運転を再開する停止再始動運転を実行する。このとき、例えば、運転者が走行をしない意志であるときには走行に備えるような燃料電池の再始動を行わないよう設定するなど、運転者の走行意思に基づいて停止再始動運転の停止条件や再始動条件を設定し、該設定した条件で燃料電池の発電運転を制御する。したがって、燃料電池の停止再始動運転での燃費を向上することができる。なお、この燃料電池システムの制御方法において、上述した燃料電池システムの種々の態様を採用してもよいし、また、上述した燃料電池システムの機能を実現するようなステップを追加してもよい。
次に、本発明を実施するための最良の形態を実施例を用いて説明する。
次に、本発明の実施例を図面に基づいて説明する。図1は、本発明の一例を表す燃料電池システム11を搭載した燃料電池自動車10の構成の概略を示す構成図であり、図2は燃料電池40の構成の概略を示す断面図である。
燃料電池自動車10は、燃料ガスとしての水素と酸化ガスとしてのエア中の酸素との電気化学反応により発電する燃料電池40が複数積層された燃料電池スタック30と、この燃料電池スタック30とインバータ54を介して接続された駆動用モータ52と、インバータ54と燃料電池スタック30とを接続する電力ライン53にDC/DCコンバータ56を介して接続されたバッテリ58と、システム全体をコントロールする電子制御ユニット70とを備えている。なお、駆動軸64は、ディファレンシャルギヤ62を介して駆動輪63,63に接続されており、駆動用モータ52から出力された動力は駆動軸64を経て最終的には駆動輪63,63に出力されるようになっている。
燃料電池スタック30は、固体高分子型の燃料電池40を複数(例えば数百個)積層したものである。図2に示すように、燃料電池40は、フッ素系樹脂などの高分子材料により形成されたプロトン伝導性の膜体である固体電解質膜42と、白金又は白金と他の金属からなる合金の触媒が練り込められたカーボンクロスにより形成され触媒が練り込められた面で固体電解質膜42を挟持してサンドイッチ構造を構成するガス拡散電極としてのアノード43及びカソード44と、このサンドイッチ構造を両側から挟みつつアノード43との間に燃料ガス流路46を形成し、カソード44との間に酸化ガス流路47を形成すると共に、隣接する燃料電池40との隔壁をなす2つのセパレータ45とにより構成されている。そして、燃料ガス流路46を通過する燃料ガスとしての水素は、アノード43でガス拡散され触媒によってプロトンと電子に分かれる。このうちプロトンは湿潤状態の固体電解質膜42を伝導してカソード44に移動し、電子は外部回路を通ってカソード44に移動する。また、酸化ガス流路47を通過する酸化ガスとしてのエアに含まれる酸素は、カソード44でガス拡散され触媒上でプロトンと電子とエア中の酸素とが反応して水が生成する。以上の電気化学反応により各燃料電池40には起電力が生じ電気エネルギが発生する。
燃料電池スタック30には、水素を供給する水素ボンベ12と、外気を吸入して圧送するエアコンプレッサ22が取り付けられている。水素ボンベ12は、数十MPaの高圧水素を蓄えており、レギュレータ14により圧力調整された水素を燃料電池スタック30へ供給するものである。燃料電池スタック30へ供給された水素は、各燃料電池40の燃料ガス流路46(図2参照)を通過したあと燃料ガス排出管32へと導出される。この燃料ガス排出管32には、燃料電池スタック30内の水素濃度を高めるために用いられるアノードパージ弁18が取り付けられている。図2に示す燃料ガス流路46内の水素濃度は酸化ガス流路47内のエア中の窒素がアノード43側に流入することにより低下するため、所定のインターバルごとに所定の開放時間だけアノードパージ弁18を開いて燃料ガス流路46内の窒素を追い出す水素ガスパージ操作を実行するよう設定されている。なお、アノードパージ弁18から排出された窒素と水素とを含むガスは、酸化ガス排出管34に送られ空気により希釈されて車外に排出される。また、水素循環ポンプ20は、燃料ガス排出管32のうち燃料電池スタック30とアノードパージ弁18との間から燃料電池スタック30とレギュレータ14との間へ水素を循環させる循環流路25に配置されている。この水素循環ポンプ20は、燃料ガス排出管32内の水素含有ガスを燃料電池スタック30の供給側に合流させるものであり、その回転数を変動させることで水素供給量を調整することができる。また、燃料電池スタック30には、冷却液が流通可能なFC用冷却液流路28aが形成されており、このFC用冷却液流路28aを燃料電池冷却ポンプ28によって冷却液が循環することにより燃料電池スタック30が冷却される。
一方、エアコンプレッサ22は、図示しないエアクリーナを介して大気中から吸入したエアを燃料電池スタック30へ圧送するものであり、その回転数を変動させることで酸素供給量を調整することができる。このエアコンプレッサ22と燃料電池スタック30との間には加湿器24が設けられ、この加湿器24はエアコンプレッサ22によって圧送されたエアを加湿して燃料電池スタック30へ供給する。燃料電池スタック30へ供給されたエアは、各燃料電池40の酸化ガス流路47(図2参照)を通過したあと酸化ガス排出管34から排出される。この酸化ガス排出管34には、エア調圧弁26が設けられ、このエア調圧弁26によって酸化ガス流路47内の圧力が調整される。なお、燃料電池スタック30から酸化ガス排出管34へ排出されるエアは電気化学反応によって生じた水により多湿になっているが、加湿器24はこの多湿なエアからエアコンプレッサ22から圧送されるエアへ水蒸気を交換する役割を果たす。
なお、レギュレータ14、アノードパージ弁18、水素循環ポンプ20、エアコンプレッサ22、加湿器24、エア調圧弁26などは燃料電池スタック30又はバッテリ58から電力の供給を受ける。
駆動用モータ52は、駆動軸64に接続され、発電機として駆動することができると共に電動機としても駆動することができる周知の同期発電電動機として構成されており、インバータ54を介してバッテリ58や燃料電池スタック30と電力のやり取りを行う。また、駆動用モータ52は、インバータ54のスイッチング素子のスイッチングにより駆動制御され駆動軸64と動力のやり取りを行う。
バッテリ58は、周知のニッケル水素二次電池として構成されており、DC/DCコンバータ56を介して燃料電池スタック30と並列に接続されている。このバッテリ58は、車両減速時の回生エネルギや燃料電池スタック30で発生した電気エネルギを吸収したり、蓄積した電気エネルギを放電して燃料電池スタック30だけでは不足する電力を駆動用モータ52に供給したりする。DC/DCコンバータ56は、電力ライン53の電圧を調整すると共にバッテリ58の充放電を行うものであり、燃料電池スタック30の動作点を調整する役割を果たす。なお、バッテリ58の代わりにキャパシタを採用してもよい。
電子制御ユニット70は、CPU72を中心として構成されたワンチップマイクロプロセッサとして構成されており、処理プログラムを記憶したROM74と、一時的にデータを記憶するRAM76と、入出力ポート(図示せず)とを備えている。この電子制御ユニット70には、図示しない流量計や温度計からの燃料電池スタック30へ供給される水素及びエアの流量や温度に関する信号、加湿器24やエアコンプレッサ22の運転状態に関する信号、駆動用モータ52を制御するために必要な信号(例えば駆動用モータ52の回転数Nmや駆動用モータ52に印加される相電流など)、バッテリ58を管理するために必要な充放電電流などが入力ポートを介して入力される。また、車速センサ89からの車速V,シフトレバー81の位置を検出するシフトポジションセンサ82からのシフトポジションSP,アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc,ブレーキペダル85の踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP,パーキングレバー87の位置を検出するパーキングブレーキポジションセンサ88からのパーキングブレーキポジションPP,システム起動状態(イグニッションオン状態)で長時間走行しないときに運転者により押下されるスリープモード選択スイッチ80からの信号SLなども入力ポートを介して入力される。一方、電子制御ユニット70からは、エアコンプレッサ22への駆動信号、加湿器24への制御信号、レギュレータ14やアノードパージ弁18,エア調圧弁26への制御信号、燃料電池冷却ポンプ28やインバータ54への制御信号、DC/DCコンバータ56への制御信号などが出力ポートを介して出力される。
次に、本実施例の燃料電池自動車10の車両走行時の動作の概略について説明する。この燃料電池自動車10では、シフトポジションSP,アクセル開度Acc,ブレーキペダルポジションBP及び車速Vなどの各種情報を入力し、この各種情報に基づいて車両に要求される走行要求パワーPdr*を計算し、該計算した走行要求パワーPdr*が出力されるように燃料電池スタック30の補機類(水素循環ポンプ20、エアコンプレッサ22及び燃料電池冷却ポンプ28など)を駆動・制御する。例えば、走行要求パワーPdr*に見合うすべての電力が燃料電池スタック30から出力されるように燃料電池スタック30の補機類を駆動・制御したり、走行要求パワーPdr*に見合う電力が燃料電池スタック30及びバッテリ58から出力されるように燃料電池スタック30の補機類を駆動・制御したり、走行要求パワーPdr*とバッテリ58の充電に必要な電力との和に見合う電力が燃料電池スタック30から出力されるように燃料電池スタック30の補機類を駆動・制御したりする。また、この燃料電池自動車10では、所定の停止条件が成立したときに燃料電池スタック30の発電運転を停止し、該停止後に所定の再始動条件が成立すると燃料電池スタック30の発電運転を再始動する停止再始動運転を行うことにより燃費を向上させることができる。
次に、本実施例の燃料電池自動車10の動作について説明する。図3は、燃料電池自動車10のECU70のCPU72により実行される駆動制御ルーチンの一例を示すフローチャートであり、図6は、駆動制御ルーチンのタイムチャートであり、(a)は、通常の停止再始動運転時のタイムチャート、(b)は、スリープモード運転時のタイムチャートである。このルーチンは、ROM74に記憶され、CPU72によりシステムが起動してから所定のタイミングごと(例えば数msecごと)に繰り返し実行される。
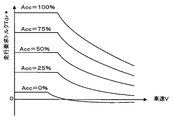
このルーチンが開始されると、CPU72は、まずアクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ89からの車速V,モータ回転数Nm,シフトポジションセンサ82からのシフトポジションSP,パーキングブレーキポジションセンサ88からのパーキングブレーキポジションPPなど制御に必要なデータを入力する(ステップS100)。なお、CPU72は、バッテリ58の充放電電流の積算値に基づいて残容量(SOC)を計算する。次に、駆動軸64に要求される要求トルクTdr*を設定すると共に車両の走行に要求される走行要求パワーPdr*を設定する(ステップS110)。ここで、要求トルクTdr*は、アクセル開度Accと車速Vと要求トルクTdr*との関係を予め定めて要求トルク設定用マップとしてROM74に記憶しておき、アクセル開度Accと車速Vとが与えられると記憶したマップから対応する要求トルクTdr*を導出して設定するものとした。図4に要求トルク設定用マップの一例を示す。また、走行要求パワーPdr*は、設定した要求トルクTdr*と駆動軸64の回転数Ndrとを乗算して算出するものとした。なお、本実施例では駆動用モータ52の回転軸が駆動軸64と直結されているため駆動軸64の回転数Ndrは駆動用モータ52の回転数Nmと一致する。
続いて、燃料電池自動車10の全体に要求されるシステム要求パワーPsys*を設定する(ステップS120)。システム要求パワーPsys*は、先ほど設定した走行要求パワーPdr*と走行以外に燃料電池自動車10に搭載された電気負荷に要求される負荷要求パワーPx*との和として算出される。ここで、負荷要求パワーPx*は、補機類の運転に必要な補機要求パワーやバッテリ58のSOCが低下しているときに必要な充電要求パワーなどを合算したものである。
続いて、燃料電池スタック30から出力可能な上限パワーであるFC最大許可パワーPfcmaxとバッテリ58から出力可能な上限のパワーであるバッテリ最大許可パワーPbmaxとを算出する(ステップS130)。FC最大許可パワーPfcmaxは、燃料電池スタック30の温度や供給燃料圧力などの変動要因により定期的に補正した電力−電流特性(P−I特性、図5参照)に基づいて算出される。また、バッテリ最大許可パワーPbmaxは、バッテリ58のSOCに基づいて算出される。
続いて、システム要求パワーPsys*を燃料電池スタック30とバッテリ58とにどのように分配するかを決定するためのパワー分配処理を実行する(ステップS140〜S320)。このパワー分配処理が実行されることにより、燃料電池スタック30に要求されるFC要求パワーPfc*とバッテリ58に要求される放電要求パワーPb*とが設定される。具体的には、まず、CPU72は、長時間走行しないという運転者の走行意思が推定されたか否かを判定する(ステップS140)。この長時間走行しないという運転者の走行意思の推定は、所定時間車速Vがゼロである、所定時間シフトポジションがパーキングポジションである、所定時間アクセルペダル83やブレーキペダル85などが操作されていない、所定時間パーキングレバー87がオン状態であるなどの条件に基づいて行い、これらの条件をすべて満たしているときに長時間走行しないという運転者の走行意思が推定される。この所定時間は、信号待ちなどで誤った推定をしないような時間(例えば3分など)に設定されている。また、スリープモード選択スイッチ80が運転者により押下されたときには、その他の条件にかかわらず長時間走行しないという運転者の走行意思が推定される。このとき、再度スリープモード選択スイッチ80が押下されたり、アクセルペダル83などの操作があったとき、つまり上記条件が解除されたときには走行するという運転者の走行意思が推定される。本実施例では、ステップS140で長時間走行しないという運転者の走行意思が推定されなかった場合には、通常の停止再始動運転のパワー分配処理(ステップS150〜S230)を実行する。
ステップS140で長時間走行しないという運転者の走行意思が推定されなかったときには、SOCの上限値を通常の発電運転の停止条件としての上限値Sustdに設定すると共にSOCの下限値を通常の発電運転の再始動条件としての下限値Sdstdに設定する(ステップS150)。この下限値Sdstdは、SOCがこの下限値Sdstdを下回ると燃料電池スタック30の発電運転を実行する閾値であり、例えばSOCが45%などに定められている。一方、上限値Sustdは、SOCがこの上限値Sustdを超えるとバッテリ58への充電を停止する閾値であり、例えばSOCが60%などに定められている。
次に、燃料電池スタック30の発電運転が停止中であるか否かを判定する(ステップS160)。燃料電池スタック30の発電運転が実行中であるときには、通常のタイミングで水素パージ操作を実行する(ステップS170)。ここで、発電運転の停止時には、カソード44から固体電解質膜42を介して酸化ガス流路47に残存している空気中の窒素がクロスリークするためアノード43での窒素濃度が高くなる。このため、発電運転の再開後、所定のタイミングで上述の水素パージ操作を実行する。この水素パージ操作を実行する通常のタイミングは、燃料電池スタック30を再始動したあと所定時間経過後に1回実行するように設定されている(図6(a)参照)。また、このタイミングは、タイマ78のタイマ値に基づいて判定する。
続いて、燃料電池スタック30の停止条件が成立したか否かを判定する(ステップS180)。燃料電池スタック30の停止条件が成立したか否かの判定は、例えば燃料電池自動車10の車速Vが所定の低速範囲(例えば時速20km以下など)であり、走行要求パワーPdr*が所定値以下で且つバッテリ58のSOCが下限値Sdstd以上であるときなど、走行に要求される電力が小さく、燃料電池スタック30の発電運転を停止可能であるか否かに基づいて行う。燃料電池スタック30の停止条件が成立していないときには、バッテリ最大許可パワーPbmaxとFC最大許可パワーPfcmaxとを超えない範囲内で、システム要求パワーPsys*を燃料電池スタック30への要求パワーであるFC要求パワーPfc*とバッテリへの要求パワーである放電要求パワーPb*とに分配する(ステップS190)。具体的には、システム要求パワーPsys*のうち走行要求パワーPdr*については燃料電池スタック30から出力することを基本とし、加速過渡時や高負荷運転時など燃料電池スタック30の出力パワーだけでは不足する場合にはバッテリ58からパワーアシストが行われるように分配される。
続いて、燃料電池スタック30の補機類の作動条件を通常の作動条件に設定する(ステップS200)。つまり、補機類の作動条件において静粛性などを考慮せず、要求された電力を出力可能な作動条件に設定する。ここでの補機類とは、水素循環ポンプ20,エアコンプレッサ22,燃料電池冷却ポンプ28など、燃料電池スタック30の発電に用いられるものである。ステップS200のあと、駆動用モータ52のトルク指令Tm*を設定する(ステップS330)。トルク指令Tm*は、燃料電池スタック30とバッテリ58とから走行要求パワーPdr*を駆動用モータ52に出力できる場合には走行要求パワーPdr*に見合ったトルク値に設定され、走行要求パワーPdr*を駆動用モータ52に出力できない場合には出力可能な範囲内のトルク値に設定される。
続いて、駆動用モータ52からモータトルク指令Tm*に相当するトルクが出力されるようにインバータ54をスイッチング制御すると共に、設定したFC要求パワーPfc*で発電運転するように燃料電池スタック30の補機類を制御し(ステップS340)、このルーチンを終了する。具体的には、燃料電池スタック30からFC要求パワーPfc*が出力されるようにステップS200で定めた作動条件に基づきエアコンプレッサ22の回転数を調節して空気量を増加又は減少させると同時に、燃料電池スタック30の動作点をDC/DCコンバータ56によって移動させる。また、バッテリ58からの電力がDC/DCコンバータ56やインバータ54を介して駆動用モータ52に供給されるようにする。このとき、水素ガスは、電気化学反応によって消費された分を水素ボンベ12から供給しながら水素循環ポンプ20によって余剰の燃料ガスを燃料電池スタック30に供給する。ここで、燃料電池スタック30の動作点の制御は、FC要求パワーPfc*が決定されると、図5(a)に示す電力−電流特性(P−I特性)からそのFC要求パワーPfc*を出力するための電流Ifc*を決定し、図5(b)に示す電流−電圧特性(I−V特性)からその電流Ifc*に対応した電圧Vfc*を決定し、その電圧Vfc*を目標電圧としてDC/DCコンバータ56で燃料電池スタック30の出力電圧を制御することにより行う。
一方、ステップS180で燃料電池スタック30の停止条件が成立したときには、FC要求パワーPfc*をゼロに設定すると共に放電要求パワーPb*をシステム要求パワーPsys*に設定することによりシステム要求パワーPsys*の分配を行う(ステップS230)。つまり、燃料電池スタック30の発電運転を停止すると共にバッテリ58からシステム要求パワーPsys*を出力させる。そして、駆動用モータ52のトルク指令Tm*を設定し(ステップS330)、駆動用モータ52からモータトルク指令Tm*に相当するトルクが出力されるようにインバータ54をスイッチング制御すると共に、燃料電池スタック30の発電運転を停止し(ステップS340)このルーチンを終了する。ここで、発電運転の停止は、レギュレータ14を閉じて水素ボンベ12からの水素ガスの供給を停止すると共に燃料電池スタック30の補機類を停止することにより実行する。
さて、燃料電池スタック30の発電運転を停止すると、ステップS160で燃料電池スタック30の発電運転が停止中であると判定され、燃料電池スタック30の再始動条件が成立したか否かを判定する(ステップS210)。ここで、発電運転の再始動条件が成立したか否かの判定は、例えば運転停止時間tsが経過したか否か、発電運転の停止中にアクセルペダル83が踏み込まれることにより要求トルクTdr*が所定値を超えたか否か、バッテリ58のSOCが下限値Sdstdを下回ったか否かなどに基づいて行われる。この運転停止時間tsは、発電運転の停止による発電能力の低下を考慮した一定値として設定されROM74に記憶されている。なお、運転停止時間tsが終了したか否かの判定はタイマ78のカウント値に基づいて行う。ステップS210で、燃料電池スタック30の再始動条件が成立していないときには、通常のタイミングでエアブローを実行する(ステップS220)。ここで、発電運転の停止時には、アノード43から固体電解質膜42を介して燃料ガス流路46に残存する水素がクロスリークするためカソード44での水素濃度が高くなる。また、発電運転の停止時は燃料電池40の温度が低下するため、酸化ガス流路47で凝縮水の発生が起きる。このため、発電運転の停止時には所定のタイミングで酸化ガス流路47に高圧のエアを流通させるエアブローを実行する。このエアブローを実行する通常のタイミングは、燃料電池スタック30の発電運転を停止したあと所定時間経過後に1回実行するように設定されている(図6(a)参照)。また、このタイミングは、タイマ78のタイマ値に基づいて判定する。続いて、FC要求パワーPfc*をゼロに設定すると共に放電要求パワーPb*をシステム要求パワーPsys*に設定し(ステップS230)、モータトルク指令Tm*をゼロに設定し(ステップS330)、燃料電池スタック30の発電運転を停止するよう制御し(ステップS340)、このルーチンを終了する。つまり、発電運転の停止を継続する。
一方、ステップS210で、燃料電池スタック30の再始動条件が成立したときには、バッテリ最大許可パワーPbmaxとFC最大許可パワーPfcmaxとを超えない範囲内で、システム要求パワーPsys*をFC要求パワーPfc*と放電要求パワーPb*とに分配し(ステップS190)、補機類の作動条件を通常の条件に設定し(ステップS200)モータトルク指令Tm*を設定し(ステップS330)、設定した条件で燃料電池スタック30及び駆動用モータ52を制御し(ステップS340)、このルーチンを終了する。つまり、燃料電池スタック30を再始動する。
そして、上述のように通常の停止再始動運転を実行しているときに、ステップS140で長時間走行しないという運転者の走行意思が推定された場合には、以下に説明するスリープモード運転を実行する(ステップS240〜S340)。このスリープモード運転は、長時間走行しない状態において、燃料電池スタック30の発電運転の停止時間を通常の停止再始動運転の停止時間に比べて長くすることにより燃料電池スタック30の燃費を高める運転モードである。また、燃料電池スタック30の低出力状態の継続による発電能力の低下に対処する処理を通常の停止再始動運転に比べて多くすることにより燃料電池スタック30の発電能力の低下を抑制する運転モードである。具体的には、まず、CPU72は、SOCの上限値を上限値Suslpに設定すると共にSOCの下限値を下限値Sdslpに変更して設定する(ステップS240)。この下限値Sdslpは、下限値Sdstdと比べて小さな値として定められており、例えばSOCが40%などに定められている。一方、上限値Sustdは、上限値Sustdと比べて大きな値として定められており、例えばSOCが75%などに定められている。つまり、通常時と比べて大きなSOCの範囲を利用するように停止再始動条件を変更することによって、発電運転の停止時間を長くすると共に発電運転の停止・再始動の頻度を低減するのである。なお、スリープモード運転中に、例えばブレーキペダル85が踏み込まれるなど、走行するという運転者の走行意思が推定されたときには、SOCの上限値を上限値Sustdに設定しSOCの下限値を下限値Sdstdに設定しスリープモード運転を解除する(ステップS150)。
続いて、燃料電池スタック30の発電運転を停止中であるか否かを判定し(ステップS250)、発電運転を停止中であるときには、通常の停止再始動運転よりも高い頻度でエアブローを実行する(ステップS260)。ここで、発電運転の停止時間が長くなるとカソード44での水素濃度が上昇したり、酸化ガス流路47での凝縮水の発生が多くなったりする。このため、スリープモード運転時には、通常時に比べて高い頻度でエアブローを実行する(図6(b)参照)。このスリープモード実行時のエアブローの実行タイミングは、燃料電池40のクロスリーク特性や、凝縮水の発生に基づいて経験的に定められ、ROM74に記憶されている。ステップS260のあと、燃料電池スタック30の再始動条件が成立したか否かを判定する(ステップS270)。ここでは、アクセルペダル83やブレーキペダル85などが操作されていないなどの状態が停車中に継続している場合であるから、再始動条件が成立したか否かの判定は、SOCが下限値Sdslpを下回ったか否かに基づいて行う。ステップS270で再始動条件が成立していない、つまり、SOCが下限値Sdslp以上であると判定されたときには、FC要求パワーPfc*をゼロに設定し、放電要求パワーPb*をシステム要求パワーPsys*に設定する(ステップS280)。そして、駆動用モータ52のトルク指令Tm*をゼロに設定し(ステップS330)、燃料電池スタック30の発電運転を停止し(ステップS340)、このルーチンを終了する。つまり、車両の停車と発電運転の停止とを継続する。
一方、ステップS270で再始動条件が成立している、つまり、SOCが下限値Sdslpを下回っていると判定されたときには、システム要求パワーPsys*の分配を行う(ステップS310)。ここでは、停車中にバッテリ58を充電するために燃料電池スタック30を再始動する場合であるから、放電要求パワーPb*をゼロに設定し、システム要求パワーPsys*を燃料電池スタック30から出力するように設定する。続いて、補機類の作動条件を通常に比べて制限した条件に設定する(ステップS320)。ここで、現在は停車中であり、走行意志がないと推定されていることから、燃料電池スタック30の発電運転を早急に行わなければならないという要求は少ない。このため、補機類の作動条件を補機類の作動時の静粛性を考慮した条件、つまり、制限した作動条件に変更する。ここでは、水素循環ポンプ20やエアコンプレッサ22,燃料電池冷却ポンプ28などの回転数を停止状態から通常よりも緩やかに増加させるように設定されている。そして、モータトルク指令Tm*をゼロに設定し(ステップS330)、設定した条件で燃料電池スタック30の発電運転を行うよう制御し(ステップS340)、このルーチンを終了する。つまり、停車状態で燃料電池スタック30を再始動する。
一方、ステップS250で発電運転を実行中であるときには、通常の停止再始動運転よりも高い頻度で水素パージ操作を実行する(ステップS290)。ここで、発電運転の停止時間が長くなるとアノード43での窒素濃度が高くなる。このため、スリープモード運転時には、通常時に比べて高い頻度で水素パージ操作を実行する(図6(b)参照)。このスリープモード実行時の水素パージ操作の実行タイミングは、燃料電池40のクロスリーク特性に基づいて経験的に定められ、ROM74に記憶されている。ステップS290のあと、燃料電池スタック30の発電運転の停止条件が成立したか否かを判定する(ステップS300)。ここでは、停車中であり、バッテリ58の充電のための発電運転を実行している場合であるから、停止条件が成立したか否かの判定は、SOCが上限値Suslpを超えたか否かに基づいて行う。燃料電池スタック30の発電運転の停止条件が成立していないとき、つまり、SOCが上限値Suslp以下であるときには、放電要求パワーPb*をゼロに設定し、システム要求パワーPsys*を燃料電池スタック30から出力するように設定し(ステップS310)、補機類の作動条件を通常に比べて制限した条件に設定する(ステップS320)。そして、モータトルク指令Tm*をゼロに設定し(ステップS330)、設定した条件で燃料電池スタック30の発電運転を行うよう制御し(ステップS340)、このルーチンを終了する。つまり、停車状態で燃料電池スタック30の発電運転を継続する。
一方、ステップS300で燃料電池スタック30の発電運転の停止条件が成立したとき、つまり、SOCが上限値Suslpを超えたときには、FC要求パワーPfc*をゼロに設定し、放電要求パワーPb*をシステム要求パワーPsys*に設定し(ステップS280)、駆動用モータ52のトルク指令Tm*をゼロに設定し(ステップS330)、燃料電池スタック30の発電運転を停止し(ステップS340)、このルーチンを終了する。つまり、停車状態で発電運転を停止する。
次に、上述した駆動制御ルーチンの具体例を図6に基づいて説明する。図6(a)に示すように、ECU70は、アクセルオンなど走行するという運転者の走行意思が推定されたときには、SOCの上限値として上限値Sustdを設定すると共にSOCの下限値として下限値Sdstdを設定する。そして、燃料電池スタック30の発電運転を継続中に、バッテリ58のSOCが下限値Sdstd以上で走行に要求される電力が小さいときなど所定の停止条件が成立すると、発電運転を停止する(時間t0)。すると、車両の要求電力(エアコンなど)をバッテリ58の蓄電電力で賄うため、SOCが低下していく(時間t0〜時間t1)。このとき、カソード44にクロスリークした水素を排除するため、エアブローを1回実行する。そして、SOCが下限値Sdstdを下回るなど再始動条件が成立すると、発電運転を再開する(時間t1)。このとき、アノード43にクロスリークした窒素を排除するため、水素パージ操作を1回実行する。そして、システム要求パワーPsys*に基づいて発電運転を行い、バッテリ58を充電する(時間t1〜時間t2)。そして、SOCが上限値Sustdを超え走行に要求される電力が小さいときなど停止条件が成立すると発電運転を停止する(時間t2)。走行するという運転者の走行意思が推定されているときには、このような処理を繰り返す(時間t0〜時間t6)。
一方、図6(b)に示すように、バッテリ58のSOCが下限値Sdstd以上で走行に要求される電力が小さいときなど所定の停止条件が成立し、発電運転を停止したあと(時間t7)、所定時間アクセルペダル83やブレーキペダル85が操作されないなど長時間走行しないという運転者の走行意思が推定されたときには、SOCの上限値が上限値Sustdより大きい上限値Suslpに変更されると共にSOCの下限値が下限値Sdstdより小さい下限値Sdslpに変更される(時間t8)。そして、車両の要求電力(エアコンなど)をバッテリ58の蓄電電力で賄うため、SOCが低下していく(時間t8〜時間t9)。このとき、長時間の停止によりカソード44にクロスリークした水素を排除するため、エアブローを通常よりも高い頻度で実行する。そして、SOCが下限値Sdslpを下回り再始動条件が成立すると、発電運転を再開する(時間t9)。このとき、燃料電池スタック30の補機類の作動条件を静粛性を考慮した条件に変更して駆動・制御を行い、バッテリ58を充電する(時間t9〜時間t10)。また、長時間の停止によりアノード43にクロスリークした窒素を排除するため、水素パージ操作を通常に比べて高い頻度で実行する。そして、SOCが上限値Suslpを超え走行に要求される電力が小さいときなど停止条件が成立すると発電運転を停止する(時間t10)。このように、SOCを利用する領域が広がるため、通常の停止再始動運転に比べて発電運転の停止時間が長くなると共に停止・再始動の頻度が低くなる(時間t8〜時間t9,時間t10〜時間t11)。
ここで、本実施例の構成要素と本発明の構成要素との対応関係を明らかにする。本実施例のECU70が本発明の推定手段、設定手段及び制御手段に相当し、バッテリ58が蓄電手段に相当し、シフトレバー81、アクセルペダル83、ブレーキペダル85及びパーキングレバー87が操作部材に相当する。なお、本実施例では、燃料電池システム11の動作を説明することにより本発明の燃料電池システムの制御方法の一例も明らかにしている。
以上詳述した本実施例の燃料電池自動車10によれば、所定の停止条件が成立したときには燃料電池スタック30の発電運転を停止し所定の再始動条件が成立したときには燃料電池スタック30の発電運転を再開する停止再始動運転を実行する。このとき、運転者が長時間走行をしない意志であるときには走行に備えるような燃料電池スタック30の再始動を行わないよう設定するなど、運転者の走行意思に基づいて通常と異なる停止再始動運転の停止条件や再始動条件を設定し、該設定した条件で燃料電池スタック30の発電運転を制御する。したがって、燃料電池スタック30の停止再始動運転での燃費を向上することができる。
また、長時間走行しないという運転者の走行意思が推定されたときには、通常の停止再始動運転のバッテリ58の下限値Sdstdと比べて小さな下限値Sdslpを再始動条件として設定し、バッテリ58のSOCが下限値Sdslpを下回ったときにはバッテリ58に蓄電するよう燃料電池スタック30の発電運転を制御するため、通常の停止再始動運転よりも長い期間燃料電池スタック30の発電運転を停止して比較的容易に燃費を向上することができる。更に、長時間走行しないという運転者の走行意思が推定されたときには、通常の停止再始動運転のバッテリ58の上限値Sustdと比べて大きな上限値Suslpを停止条件として設定し、バッテリ58のSOCが上限値Suslpを超えたときには、バッテリ58への蓄電を停止するよう燃料電池スタック30の発電運転を制御するため、下限値Sdslpと上限値Suslpとの範囲を大きくすることにより燃料電池スタック30の発電運転の停止及び再始動が頻繁に起きるのを防止可能とし、システムを構成する部品の損傷などを低減することができる。
更にまた、長時間走行しないという運転者の走行意思が推定されたときには、燃料電池スタック30の補機類の作動条件を通常の停止再始動運転よりも制限した作動条件に設定するため、長時間の停車中での静粛性を高めることができる。
そして、長時間走行しないという運転者の走行意思が推定されたあと走行するという運転者の走行意思が推定されたときには、通常の停止条件及び通常の再始動条件、つまり、上限値Suslpから上限値Sustdに変更すると共に下限値Sdslpから下限値Sdstdに変更するため、運転者の走行意志を推定して通常の条件に変更して、走行に必要な電力をすぐに出力可能に備えることができる。
そしてまた、長時間走行しないという運転者の走行意思が推定されたときには、循環流路25を循環する水素ガスを排出すると共に新たな水素ガスを循環流路25に導入するパージ操作の実行頻度を通常の停止再始動運転時よりも増加させてパージ操作を実行するため、燃料電池スタック30の発電運転を停止することによって低下した発電環境を十分改善可能であり、燃料電池スタック30の発電運転を安定して行うことができる。また、長時間走行しないという運転者の走行意思が推定されたときには、酸化ガス流路47に高圧のエアを流通させるエアブローの実行頻度を通常の停止再始動運転時よりも増加させて実行するため、燃料電池スタック30の発電運転を停止することによって低下した発電環境を十分改善可能であり、燃料電池スタック30の発電運転を安定して行うことができる。
そして更に、運転者から長時間走行しないという走行意思をスリープモード選択スイッチ80により取得して運転者の走行意思を推定するため、より確実に長時間走行しない走行意志を推定することができる。
なお、本発明は上述した実施例に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の態様で実施し得ることはいうまでもない。
例えば、上述した実施例では、スリープモード運転において、通常の下限値Sdstdを下限値Sdslpに変更すると共に通常の上限値Sustdを上限値Suslpに変更するとしたが、上限値と下限値のどちらか一方のみを変更するようにしてもよい。こうしても、スリープモード運転でのSOCの利用範囲が通常と比べて広がるため、燃料電池スタック30の停止時間を通常よりも長くして燃費を向上することができる。
また、上述した実施例では、スリープモード運転において、水素パージ操作の頻度を高めることにより燃料電池スタック30の発電環境を改善するとしたが、これに加えてまたはこれに代えてスリープモード運転での発電運転の再開時又は再開後において、水素供給量を通常の発電運転と比べて大きくして再始動を実行してもよい。こうすれば、発電しやすい状態で燃料電池スタック30の発電運転を再開するため、発電環境を十分改善して燃料電池スタック30を安定した状態で発電運転することができる。あるいは、スリープモード運転において、通常時に比べて水素パージ操作時間を長くすることによって燃料電池スタック30の発電環境を改善してもよい。こうしても、燃料電池スタック30を安定した状態で発電運転することができる。なお、エアブローの実行頻度などについても上記水素パージ操作と同様である。また、スリープモード運転において、エアブローの実行頻度と水素パージ操作の頻度とをI−V特性(図5(b)参照)や固体電解質膜42の湿潤状態を反映する交流インピーダンス値やアノード43の窒素濃度などに基づいて設定してもよい。つまり、I−V特性が低下しているときにはエアブローの実行頻度や水素パージ操作の頻度が高くなるよう設定してもよいし、固体電解質膜42がフラッディング状態であるときにはエアブローの実行頻度や水素パージ操作の頻度が高くなるよう設定してもよいし、アノード43の窒素濃度が高いときにはエアブローの実行頻度や水素パージ操作の頻度が高くなるよう設定してもよい。また、エアブローにおいて、アノード43での水素圧によりクロスリーク量が変わるため、該水素圧に基づいてエアブロー頻度を変えるようにしてもよい。つまり、アノード43での水素圧が高いときにはエアブローの実行頻度が高くなるよう設定してもよい。なお、上述した実施例では、水素パージ操作を発電運転中に実行するとしたが、発電運転の停止中に実行してもよい。このとき、同時にエアブローも実行してもよい。こうすれば、水素パージ操作によって車外に排出される水素の濃度をエアブローによる空気によって希釈することができる。
更に、上述した実施例では、SOCが下限値Sdstdを下回ると発電運転を再開する再始動条件と、SOCが上限値Sustdを超えると発電運転を停止する停止条件とを用いて通常の停止再始動運転を行うとしたが、例えば、SOCが下限値Sdstdから上限値Sustdの範囲になるように定められたSOC−充電要求パワーマップを用いて通常の停止再始動運転を行ってもよい。こうしても、燃料電池スタック30の停止再始動運転での燃費を向上することができる。
更にまた、上述した実施例では、車速V、シフトポジション、アクセルペダル83やブレーキペダル85などの操作及びパーキングブレーキポジションなどの状態に基づいて長時間走行しないという運転者の走行意思を推定するとしたが、これに加えてシートベルト装着状態や車両のドア開閉状態に基づいて長時間走行しないという運転者の走行意思を推定してもよい。つまり、システム起動状態でシートベルトを装着していないときやドアの開閉を行わないときには、走行しないことが多いため、これらに基づいて走行意思を推定してもよい。また、上述した実施例では、車速V、シフトポジション、アクセルペダル83やブレーキペダル85などの操作及びパーキングブレーキポジションのすべてが所定時間操作されていないときに長時間走行しないという運転者の走行意思を推定するとしたが、これらのうちいずれか1つ又は2以上の条件に基づいて走行意思を推定してもよい。
そして、上述した実施例では、スリープモード運転中のステップS310でバッテリ58を充電する際にFC要求パワーPfc*をシステム要求パワーPsys*に設定するとしたが、システム要求パワーPsys*を発電効率の高い領域で発電運転を行うようなシステム要求パワーPfcwel*に再設定してもよい。具体的には、図7に示す発電電力と発電効率との関係を用いて、発電効率の高い領域となるシステム要求パワーPfcwel*に再設定する。こうすれば、燃料電池スタック30の停止再始動運転での燃費を一層向上することができる。
そしてまた、上述した実施例では特に説明しなかったが、例えば、スリープモード運転中にブレーキペダル85が踏み込まれたときなど、スリープモード運転を解除するときには、燃料電池スタック30が発電可能となったあとシフトポジションが変更可能になるようにしてもよい。こうすれば、走行可能な状態であるか否かを運転者に伝えることができる。また、スリープモード運転の解除時にはバッテリ58によるEV走行を許可してもよい。
そして更に、上述した実施例では、スリープモード運転において、ステップS310で作動条件を制限する補機類を水素循環ポンプ20、エアコンプレッサ22及び燃料電池冷却ポンプ28としたが、この補機類に、駆動用モータ52、インバータ54、DC/DCコンバータ56などの発電した電力の駆動力への変換に用いられる補機類や、発電に用いられるエアコンプレッサ22を含めてもよい。こうすれば、スリープモード運転中の静粛性を一層向上することができる。また、上述した実施例では、ステップS320でスリープモード運転中の燃料電池スタック30の再始動時には、補機類の回転数を通常よりも緩やかに増加させるように補機類の作動を制限するとしたが、スリープモード運転中の燃料電池スタック30の再始動時には、例えば充電要求パワーを通常時に比べて小さく設定するなどして補機類の定常時の回転数を低減させることにより補機類の作動を制限してもよい。こうしても、スリープモード運転中の静粛性を向上することができる。
そして更にまた、上述した実施例では、自動車に搭載した燃料電池システム11について説明したが、同様の燃料電池システムを列車などの他の車両や船舶や航空機などの移動体に搭載してもよい。
10 燃料電池自動車、11 燃料電池システム、12 水素ボンベ、14 レギュレータ、18 アノードパージ弁、20 水素循環ポンプ、22 エアコンプレッサ、24 加湿器、25 循環流路、26 エア調圧弁、28 燃料電池冷却ポンプ、30 燃料電池スタック、32 燃料ガス排出管、34 酸化ガス排出管、40 燃料電池、42 固体電解質膜、43 アノード、44 カソード、45 セパレータ、46 燃料ガス流路、47 酸化ガス流路、52 駆動用モータ、53 電力ライン、54 インバータ、56 DC/DCコンバータ、58 バッテリ、62 ディファレンシャルギヤ、63 駆動輪、64 駆動軸、70 電子制御ユニット、72 CPU、74 ROM、76 RAM、78 タイマ、80 スリープモード選択スイッチ、81 シフトレバー、82 シフトポジションセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、86 ブレーキペダルポジションセンサ、87 パーキングレバー、88 パーキングブレーキポジションセンサ、89 車速センサ。
Claims (15)
- 所定の停止条件が成立したときには燃料電池の発電運転を停止し所定の再始動条件が成立したときには該燃料電池の発電運転を再開する停止再始動運転を実行する燃料電池システムであって、
走行しないという運転者の走行意思を推定する推定手段と、
前記停止条件及び前記再始動条件のうち少なくとも一方の条件を前記推定手段によって推定された前記運転者の走行意思に基づいて設定する設定手段と、
前記設定手段によって設定された条件で前記燃料電池の発電運転を制御する制御手段と、
を備えた燃料電池システム。 - 前記設定手段は、前記推定手段によって長時間走行しないという運転者の走行意思が推定されたときには前記停止条件及び前記再始動条件のうち少なくとも一方の条件を前記燃料電池の発電運転の停止時間が長くなるよう設定する、
請求項1に記載の燃料電池システム。 - 請求項1又は2に記載の燃料電池システムであって、
前記燃料電池が発電した電力を蓄電する蓄電手段を備え、
前記設定手段は、前記蓄電手段の蓄電量に関する前記条件を設定する、
燃料電池システム。 - 前記設定手段は、前記推定手段によって長時間走行しないという運転者の走行意思が推定されたときには、前記通常の停止再始動運転の前記蓄電手段の下限蓄電量と比べて小さな下限蓄電量を前記再始動条件として設定し、
前記制御手段は、前記蓄電手段の蓄電量が前記下限蓄電量を下回ったときには前記蓄電手段に蓄電するよう前記燃料電池の発電運転を制御する、
請求項3に記載の燃料電池システム。 - 前記設定手段は、前記推定手段によって長時間走行しないという運転者の走行意思が推定されたときには、前記通常の停止再始動運転の前記蓄電手段の上限蓄電量と比べて大きな上限蓄電量を前記停止条件として設定し、
前記制御手段は、前記蓄電手段の蓄電量が前記上限蓄電量を超えたときには、前記蓄電手段への蓄電を停止するよう前記燃料電池の発電運転を制御する、
請求項4に記載の燃料電池システム。 - 請求項1〜5のいずれかに記載の燃料電池システムであって、
前記燃料電池の発電及び該燃料電池が発電した電力の駆動力への変換の少なくとも一方に用いられる前記燃料電池の補機類、を備え、
前記設定手段は、前記推定手段によって推定された前記運転者の走行意思に基づいて通常の前記停止再始動運転での前記補機類の作動条件とは異なる作動条件を設定し、
前記制御手段は、前記設定手段によって設定された作動条件で前記燃料電池の補機類の運転を制御する、
燃料電池システム。 - 前記設定手段は、前記推定手段によって長時間走行しないという運転者の走行意思が推定されたときには、前記補機類の作動条件を通常の停止再始動運転時よりも制限した作動条件に設定する、
請求項6に記載の燃料電池システム。 - 前記設定手段は、前記推定手段によって長時間走行しない前記運転者の走行意思が推定されたあと前記推定手段によって走行するという前記運転者の走行意思が推定されたときには、通常の前記停止条件及び前記再始動条件に変更する、
請求項1〜7のいずれかに記載の燃料電池システム。 - 請求項1〜8のいずれかに記載の燃料電池システムであって、
前記燃料電池に供給された燃料ガスが前記燃料電池を介して循環する循環流路、を備え、
前記設定手段は、前記推定手段によって推定された前記運転者の走行意思に基づいて前記循環流路を循環する燃料ガスを排出すると共に新たな燃料ガスを前記循環流路に導入するパージ操作の実行条件を通常の前記停止再始動運転での該パージ操作の実行条件とは異なる条件に設定し、
前記制御手段は、前記設定手段によって設定された実行条件で前記パージ操作を実行する、
燃料電池システム。 - 前記設定手段は、前記推定手段によって長時間走行しないという運転者の走行意思が推定されたときには、前記パージ操作の実行頻度を通常の停止再始動運転時よりも増加させた実行頻度に設定する、
請求項9に記載の燃料電池システム。 - 前記推定手段は、前記運転者が操作可能な操作部材の操作状態に基づいて運転者の走行意思を推定する、
請求項1〜10のいずれかに記載の燃料電池システム。 - 前記推定手段は、前記操作状態に基づいて運転者の走行意思を推定するに際して、アクセル開度状態、走行ブレーキ状態、パーキングブレーキ状態及びシフト位置状態のうち少なくとも1つの状態から運転者の走行意思を推定する、
請求項11に記載の燃料電池システム。 - 前記推定手段は、前記運転者から長時間走行しないという走行意思を取得することにより該運転者の走行意思を推定する、
請求項1〜11のいずれかに記載の燃料電池システム。 - 請求項1〜13のいずれかに記載の燃料電池システムを搭載した車両。
- 所定の停止条件が成立したときには燃料電池の発電運転を停止し所定の再始動条件が成立したときには該燃料電池の発電運転を再開する停止再始動運転を実行する燃料電池システムの制御方法であって、
運転者の走行意思を推定し、前記停止条件及び前記再始動条件のうち少なくとも一方の条件を該推定した走行意志に基づいて設定し、該設定した条件で前記燃料電池の発電運転を制御する、
燃料電池システムの制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005321279A JP2007128778A (ja) | 2005-11-04 | 2005-11-04 | 燃料電池システム、その制御方法及びそれを搭載した車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005321279A JP2007128778A (ja) | 2005-11-04 | 2005-11-04 | 燃料電池システム、その制御方法及びそれを搭載した車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007128778A true JP2007128778A (ja) | 2007-05-24 |
Family
ID=38151255
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005321279A Pending JP2007128778A (ja) | 2005-11-04 | 2005-11-04 | 燃料電池システム、その制御方法及びそれを搭載した車両 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007128778A (ja) |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009150969A1 (ja) * | 2008-06-09 | 2009-12-17 | トヨタ自動車株式会社 | 車両および車両の制御方法 |
| WO2010128555A1 (ja) * | 2009-05-08 | 2010-11-11 | トヨタ自動車株式会社 | 燃料電池の水素濃度推定装置、燃料電池システム |
| DE112008002742T5 (de) | 2007-10-17 | 2010-11-11 | Toyota Jidosha Kabushiki Kaisha, Toyota-shi | Brennstoffzellensystem |
| KR101000703B1 (ko) | 2008-07-08 | 2010-12-10 | 현대자동차주식회사 | 연료전지 하이브리드 차량의 아이들 스탑/해제 제어 방법 |
| JP2011066973A (ja) * | 2009-09-16 | 2011-03-31 | Honda Motor Co Ltd | 燃料電池車両 |
| WO2011146041A1 (en) * | 2010-05-20 | 2011-11-24 | Utc Power Corporation | Quick restart of fuel cell power plant as alternative to idling |
| CN101618720B (zh) * | 2009-08-05 | 2012-05-23 | 奇瑞汽车股份有限公司 | 一种混合动力汽车整车控制器的控制方法 |
| JP2012253948A (ja) * | 2011-06-03 | 2012-12-20 | Toyota Motor Corp | 燃料電池システム、および燃料電池システムの制御方法 |
| JP2013105635A (ja) * | 2011-11-14 | 2013-05-30 | Toyota Motor Corp | 燃料電池システム及び燃料電池車両 |
| CN104943678A (zh) * | 2014-03-28 | 2015-09-30 | 富士重工业株式会社 | 车辆用控制装置 |
| JP2016095997A (ja) * | 2014-11-14 | 2016-05-26 | トヨタ自動車株式会社 | 燃料電池用排水装置、燃料電池システム、移動体 |
| JP2017107771A (ja) * | 2015-12-10 | 2017-06-15 | 日産自動車株式会社 | 燃料電池システム及び燃料電池システムの制御方法 |
| JP2017224577A (ja) * | 2016-06-17 | 2017-12-21 | 三菱自動車工業株式会社 | 車両用燃料電池の電力制御装置 |
| CN107696882A (zh) * | 2017-07-24 | 2018-02-16 | 国网浙江海宁市供电公司 | 无人机空中充电装置 |
| JP2018060686A (ja) * | 2016-10-05 | 2018-04-12 | 三菱自動車工業株式会社 | 電動車両用の燃料電池システム |
| US9966616B2 (en) | 2015-05-11 | 2018-05-08 | Hyundai Motor Company | Apparatus and method for controlling purge valve of fuel cell vehicle |
| US10205184B2 (en) | 2014-04-10 | 2019-02-12 | Hyundai Motor Company | System and method for controlling performance of fuel cell stack |
| JP2019114367A (ja) * | 2017-12-21 | 2019-07-11 | トヨタ自動車株式会社 | 燃料電池システム |
| US12097782B2 (en) | 2021-06-16 | 2024-09-24 | Hino Motors, Ltd. | Battery management device |
-
2005
- 2005-11-04 JP JP2005321279A patent/JP2007128778A/ja active Pending
Cited By (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112008002742T5 (de) | 2007-10-17 | 2010-11-11 | Toyota Jidosha Kabushiki Kaisha, Toyota-shi | Brennstoffzellensystem |
| US8309262B2 (en) | 2007-10-17 | 2012-11-13 | Toyota Jidosha Kabushiki Kaisha | Fuel cell system |
| CN102056762B (zh) * | 2008-06-09 | 2013-04-03 | 丰田自动车株式会社 | 车辆以及车辆的控制方法 |
| CN102056762A (zh) * | 2008-06-09 | 2011-05-11 | 丰田自动车株式会社 | 车辆以及车辆的控制方法 |
| WO2009150969A1 (ja) * | 2008-06-09 | 2009-12-17 | トヨタ自動車株式会社 | 車両および車両の制御方法 |
| US8473132B2 (en) | 2008-06-09 | 2013-06-25 | Toyota Jidosha Kabushiki Kaisha | Vehicle and method for controlling the same |
| KR101000703B1 (ko) | 2008-07-08 | 2010-12-10 | 현대자동차주식회사 | 연료전지 하이브리드 차량의 아이들 스탑/해제 제어 방법 |
| WO2010128555A1 (ja) * | 2009-05-08 | 2010-11-11 | トヨタ自動車株式会社 | 燃料電池の水素濃度推定装置、燃料電池システム |
| JP5338903B2 (ja) * | 2009-05-08 | 2013-11-13 | トヨタ自動車株式会社 | 燃料電池の水素濃度推定装置、燃料電池システム |
| US8542026B2 (en) | 2009-05-08 | 2013-09-24 | Toyota Jidosha Kabushiki Kaisha | Apparatus for estimating fuel-cell hydrogen concentration and fuel cell system |
| CN101618720B (zh) * | 2009-08-05 | 2012-05-23 | 奇瑞汽车股份有限公司 | 一种混合动力汽车整车控制器的控制方法 |
| JP2011066973A (ja) * | 2009-09-16 | 2011-03-31 | Honda Motor Co Ltd | 燃料電池車両 |
| US9142848B2 (en) | 2009-09-16 | 2015-09-22 | Honda Motor Co., Ltd. | Fuel cell vehicle and method of controlling fuel cell and storage battery provided in the fuel cell vehicle |
| WO2011146041A1 (en) * | 2010-05-20 | 2011-11-24 | Utc Power Corporation | Quick restart of fuel cell power plant as alternative to idling |
| US9509002B2 (en) | 2010-05-20 | 2016-11-29 | Audi Ag | Quick restart of fuel cell power plant as alternative to idling |
| JP2012253948A (ja) * | 2011-06-03 | 2012-12-20 | Toyota Motor Corp | 燃料電池システム、および燃料電池システムの制御方法 |
| JP2013105635A (ja) * | 2011-11-14 | 2013-05-30 | Toyota Motor Corp | 燃料電池システム及び燃料電池車両 |
| US9676290B2 (en) | 2014-03-28 | 2017-06-13 | Subaru Corporation | Vehicle controller |
| CN104943678A (zh) * | 2014-03-28 | 2015-09-30 | 富士重工业株式会社 | 车辆用控制装置 |
| US10205184B2 (en) | 2014-04-10 | 2019-02-12 | Hyundai Motor Company | System and method for controlling performance of fuel cell stack |
| US10971743B2 (en) | 2014-04-10 | 2021-04-06 | Hyundai Motor Company | System and method for controlling performance of fuel cell stack |
| KR101838356B1 (ko) * | 2014-11-14 | 2018-03-13 | 도요타지도샤가부시키가이샤 | 연료 전지용 배수 장치, 연료 전지 시스템, 이동체, 연료 전지 시스템의 제어 방법 |
| JP2016095997A (ja) * | 2014-11-14 | 2016-05-26 | トヨタ自動車株式会社 | 燃料電池用排水装置、燃料電池システム、移動体 |
| US10777827B2 (en) | 2014-11-14 | 2020-09-15 | Toyota Jidosha Kabushiki Kaisha | Water drainage device for fuel cell, fuel cell system, moving body and control method of fuel cell system |
| US9966616B2 (en) | 2015-05-11 | 2018-05-08 | Hyundai Motor Company | Apparatus and method for controlling purge valve of fuel cell vehicle |
| JP2017107771A (ja) * | 2015-12-10 | 2017-06-15 | 日産自動車株式会社 | 燃料電池システム及び燃料電池システムの制御方法 |
| JP2017224577A (ja) * | 2016-06-17 | 2017-12-21 | 三菱自動車工業株式会社 | 車両用燃料電池の電力制御装置 |
| JP2018060686A (ja) * | 2016-10-05 | 2018-04-12 | 三菱自動車工業株式会社 | 電動車両用の燃料電池システム |
| CN107696882A (zh) * | 2017-07-24 | 2018-02-16 | 国网浙江海宁市供电公司 | 无人机空中充电装置 |
| JP2019114367A (ja) * | 2017-12-21 | 2019-07-11 | トヨタ自動車株式会社 | 燃料電池システム |
| US12097782B2 (en) | 2021-06-16 | 2024-09-24 | Hino Motors, Ltd. | Battery management device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4353154B2 (ja) | 燃料電池自動車 | |
| CN100534828C (zh) | 燃料电池系统和装有该燃料电池系统的电动车辆 | |
| KR101677408B1 (ko) | 연료 전지 시스템 및 연료 전지 시스템의 제어 방법 | |
| KR101000703B1 (ko) | 연료전지 하이브리드 차량의 아이들 스탑/해제 제어 방법 | |
| JP3719229B2 (ja) | 電源装置 | |
| JP2007128778A (ja) | 燃料電池システム、その制御方法及びそれを搭載した車両 | |
| EP2712015B1 (en) | Fuel cell system | |
| JP6206375B2 (ja) | 燃料電池システムおよび燃料電池搭載車両 | |
| JP2004056868A (ja) | 燃料電池車両のアイドル制御装置 | |
| WO2013128610A1 (ja) | 燃料電池システム | |
| WO2013128609A1 (ja) | 燃料電池システム | |
| CN101926039A (zh) | 燃料电池系统 | |
| JP4613694B2 (ja) | 燃料電池自動車及びその制御方法 | |
| JP4523981B2 (ja) | 燃料電池システム | |
| CN112238760A (zh) | 混合动力车辆以及混合动力车辆的控制方法 | |
| JP5769083B2 (ja) | 燃料電池システム及び燃料電池車両 | |
| JP6198146B2 (ja) | 燃料電池システム及びその制御方法 | |
| JP4718526B2 (ja) | 燃料電池車両 | |
| JP2006236862A (ja) | 燃料電池システム及びそれを搭載した車両 | |
| JP6932756B2 (ja) | 燃料電池車両、及び燃料電池車両の起動方法 | |
| JP2012094257A (ja) | 燃料電池システム | |
| JP2011018461A (ja) | 燃料電池システム | |
| JP2007026843A (ja) | 燃料電池自動車およびその制御方法 | |
| KR101804774B1 (ko) | 연료전지 차량과 그 제어방법 | |
| JP2006331775A (ja) | 燃料電池システム、その制御方法及びそれを搭載した車両 |