JP2007146995A - 静圧スライダ - Google Patents
静圧スライダ Download PDFInfo
- Publication number
- JP2007146995A JP2007146995A JP2005343734A JP2005343734A JP2007146995A JP 2007146995 A JP2007146995 A JP 2007146995A JP 2005343734 A JP2005343734 A JP 2005343734A JP 2005343734 A JP2005343734 A JP 2005343734A JP 2007146995 A JP2007146995 A JP 2007146995A
- Authority
- JP
- Japan
- Prior art keywords
- movable body
- static pressure
- movable
- support
- fixed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C29/00—Bearings for parts moving only linearly
- F16C29/02—Sliding-contact bearings
- F16C29/025—Hydrostatic or aerostatic
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/06—Bearings not otherwise provided for with moving member supported by a fluid cushion formed, at least to a large extent, otherwise than by movement of the shaft, e.g. hydrostatic air-cushion bearings
- F16C32/0603—Bearings not otherwise provided for with moving member supported by a fluid cushion formed, at least to a large extent, otherwise than by movement of the shaft, e.g. hydrostatic air-cushion bearings supported by a gas cushion, e.g. an air cushion
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Magnetic Bearings And Hydrostatic Bearings (AREA)
- Electron Beam Exposure (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Abstract
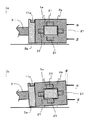
【解決手段】略平行に配置された一対の固定体1と、各固定体1に囲繞して配置され、固定体1に沿って移動する一対の第1可動体2と、該一対の第1可動体2を連結する支持体3と、を備え、前記支持体3の少なくとも一端に、固定体1に対する第1可動体2の傾斜角度を検出する検出手段12と、該検出手段12により検出された傾斜角度に対応して第1可動体2の傾斜角度を調整する調整手段11を備えたことを特徴とする。
【選択図】図1
Description
また、検出手段が非接触型変位計であることから、発熱を伴わない測定が可能であり、パーティクルの発生も防止することができる。
1、1a、1b、101:固定体
2、2a、2b、102:可動体
3:支持体
4a、4b、4c、4d:台座
5a、5b:拘束体
6、6a、6b:弾性体
7:第2可動体
11、111:調整手段
12、121:検出手段
21、26、121:静圧パッド
22、27、122:案内面
23、28、123:静圧面
24、29:流体排気溝
25、30:真空排気管
126:取り付け部品
127:予圧用ネジ
128:予圧用バネ
129:ラビリンス部
Claims (9)
- 略平行に配置された一対の固定体と、各固定体を囲繞して配置され、固定体に沿って移動する一対の第1可動体と、該一対の第1可動体を連結する支持体と、を備え、前記支持体の少なくとも一端に、固定体に対する第1可動体の傾斜角度を検出する検出手段と、該検出手段により検出された傾斜角度に対応して第1可動体の傾斜角度を調整する調整手段を備えたことを特徴とする静圧スライダ。
- 前記検出手段は、非接触型変位計であることを特徴とする請求項1に記載の静圧スライダ。
- 前記検出手段である非接触型変位計は、静電容量型であることを特徴とする
請求項2に記載の静圧スライダ。 - 前記検出手段である非接触型変位計は、レーザ測長型であることを特徴とする請求項2に記載の静圧スライダ。
- 前記調整手段は、圧電素子であることを特徴とする請求項1〜4の何れかに記載の静圧スライダ。
- 前記調整手段は、電磁モータであることを特徴とする請求項1〜4の何れかに記載の静圧スライダ。
- 前記支持体の少なくとも一端に弾性体を配置したことを特徴とする請求項1〜6の何れかに記載の静圧スライダ。
- 前記支持体に囲繞して配置され、支持体に沿って移動する第2可動体を備えたことを特徴とする請求項1〜7の何れかに記載の静圧スライダ。
- 前記固定体、支持体および可動体は、セラミックスから成ることを特徴とする請求項1〜8の何れかに記載の静圧スライダ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005343734A JP4535991B2 (ja) | 2005-11-29 | 2005-11-29 | 静圧スライダ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005343734A JP4535991B2 (ja) | 2005-11-29 | 2005-11-29 | 静圧スライダ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007146995A true JP2007146995A (ja) | 2007-06-14 |
| JP4535991B2 JP4535991B2 (ja) | 2010-09-01 |
Family
ID=38208633
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005343734A Expired - Fee Related JP4535991B2 (ja) | 2005-11-29 | 2005-11-29 | 静圧スライダ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4535991B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011104806A1 (ja) * | 2010-02-23 | 2011-09-01 | 株式会社アドバンテスト | ステージ装置 |
| WO2011111100A1 (ja) * | 2010-03-10 | 2011-09-15 | 黒田精工株式会社 | 空気圧リニアガイド方式の並列スライダ装置およびその制御方法および測定装置 |
| JP2013086964A (ja) * | 2011-10-21 | 2013-05-13 | Takano Kasei Kogyo Kk | 移動装置 |
| JP2015213113A (ja) * | 2014-05-01 | 2015-11-26 | キヤノン株式会社 | リソグラフィ装置、および物品の製造方法 |
| CN110630638A (zh) * | 2019-10-30 | 2019-12-31 | 北京灵禾科技发展有限公司 | 一种气浮轴承 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08229759A (ja) * | 1995-02-24 | 1996-09-10 | Canon Inc | 位置決め装置並びにデバイス製造装置及び方法 |
| JPH09250544A (ja) * | 1996-03-13 | 1997-09-22 | Canon Inc | 軸受装置およびそれを用いた軸受装置 |
| JP2001325026A (ja) * | 2000-05-12 | 2001-11-22 | Canon Inc | 移動ステージの原点復帰方法 |
| JP2003191140A (ja) * | 2001-12-25 | 2003-07-08 | Canon Inc | 位置決め装置 |
| JP2003343561A (ja) * | 2002-05-30 | 2003-12-03 | Kyocera Corp | 直線案内装置 |
| JP2004060833A (ja) * | 2002-07-31 | 2004-02-26 | Kyocera Corp | 静圧気体直線案内装置 |
| JP2004119426A (ja) * | 2002-09-24 | 2004-04-15 | Nikon Corp | 特殊雰囲気用エアガイド、ステージ装置及び露光装置 |
-
2005
- 2005-11-29 JP JP2005343734A patent/JP4535991B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08229759A (ja) * | 1995-02-24 | 1996-09-10 | Canon Inc | 位置決め装置並びにデバイス製造装置及び方法 |
| JPH09250544A (ja) * | 1996-03-13 | 1997-09-22 | Canon Inc | 軸受装置およびそれを用いた軸受装置 |
| JP2001325026A (ja) * | 2000-05-12 | 2001-11-22 | Canon Inc | 移動ステージの原点復帰方法 |
| JP2003191140A (ja) * | 2001-12-25 | 2003-07-08 | Canon Inc | 位置決め装置 |
| JP2003343561A (ja) * | 2002-05-30 | 2003-12-03 | Kyocera Corp | 直線案内装置 |
| JP2004060833A (ja) * | 2002-07-31 | 2004-02-26 | Kyocera Corp | 静圧気体直線案内装置 |
| JP2004119426A (ja) * | 2002-09-24 | 2004-04-15 | Nikon Corp | 特殊雰囲気用エアガイド、ステージ装置及び露光装置 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011104806A1 (ja) * | 2010-02-23 | 2011-09-01 | 株式会社アドバンテスト | ステージ装置 |
| US8530857B2 (en) | 2010-02-23 | 2013-09-10 | Advantest Corp. | Stage device |
| EP2541588A4 (en) * | 2010-02-23 | 2013-11-06 | Advantest Corp | STAGE DEVICE |
| JP5667451B2 (ja) * | 2010-02-23 | 2015-02-12 | 株式会社アドバンテスト | ステージ装置 |
| WO2011111100A1 (ja) * | 2010-03-10 | 2011-09-15 | 黒田精工株式会社 | 空気圧リニアガイド方式の並列スライダ装置およびその制御方法および測定装置 |
| US8984971B2 (en) | 2010-03-10 | 2015-03-24 | Kuroda Precision Industries Ltd. | Parallel slider device with a pneumatic linear guide, control method therefor and measuring device using same |
| JP2013086964A (ja) * | 2011-10-21 | 2013-05-13 | Takano Kasei Kogyo Kk | 移動装置 |
| JP2015213113A (ja) * | 2014-05-01 | 2015-11-26 | キヤノン株式会社 | リソグラフィ装置、および物品の製造方法 |
| CN110630638A (zh) * | 2019-10-30 | 2019-12-31 | 北京灵禾科技发展有限公司 | 一种气浮轴承 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4535991B2 (ja) | 2010-09-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5228358A (en) | Motion guiding device | |
| US11784084B2 (en) | High precision air bearing stage with capability of parasitic error compensation | |
| CN100580545C (zh) | 用于样本检测和处理的高分辨率动态定位机构 | |
| JP5674149B2 (ja) | ボールねじ軸の累積リード誤差測定装置及び測定方法 | |
| JP4936934B2 (ja) | ステージ機構、及びそれを備えた電子顕微鏡、並びにステージ機構の位置決め制御方法 | |
| EP0443831B1 (en) | Motion guiding device | |
| JP4853836B2 (ja) | 精密微動位置決め装置およびそれを備えた微動位置決めステージ | |
| US20050008269A1 (en) | Hydrostatic bearing, alignment apparatus, exposure apparatus, and device manufacturing method | |
| JP4535991B2 (ja) | 静圧スライダ | |
| US20100092113A1 (en) | Static pressure slider and transferring device and processing device provided with the same | |
| US6446950B2 (en) | Travelling worktable apparatus | |
| JP5048243B2 (ja) | 位置決めデバイス | |
| CN101432628B (zh) | 用于检查基板的表面的测量装置和测量方法 | |
| JP4962779B2 (ja) | ステージ装置およびその浮上制御方法と、ステージ装置を用いた露光装置 | |
| JP2001241439A (ja) | 静圧軸受を備えた移動装置 | |
| JP2006083964A (ja) | ステージスライダ機構 | |
| US20240186278A1 (en) | Mounting device and mounting method | |
| JPH1123752A (ja) | 移動案内装置 | |
| JPH10141374A (ja) | 能動静圧軸受装置および位置決めステージ | |
| JP2001219326A (ja) | 真空対応型スライド装置 | |
| JP4923441B2 (ja) | 形状測定器 | |
| JP4962780B2 (ja) | ステージ装置およびその浮上制御方法と、ステージ装置を用いた露光装置 | |
| US20040250776A1 (en) | Sample-setting moving stage, manufacturing apparatus for circuit pattern, and inspection apparatus for circuit pattern | |
| JP5755123B2 (ja) | ステージおよびステージの製造方法 | |
| JP2004150493A (ja) | 静圧軸受テーブル |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080519 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100428 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100518 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100615 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130625 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4535991 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |